
Abstract
Underwater sensor networks with acoustic communications are significantly challenged due to several unique characteristics, such as energy consumption, high propagation delay, and severely limited distance-dependent bandwidth. These unique characteristics make it difficult to directly adopt schemes for underwater acoustic sensor networks that are already proven for reliable terrestrial wireless sensor networks. In particular, propagation delay is one of the key elements for delay-sensitive underwater applications. In this article, we propose an adaptive network allocation vector timer–based underwater carrier sense multiple access with collision avoidance medium access control protocol with propagation delay estimation to maximize network throughput while reducing the end-to-end delay in transmission for delay-sensitive applications. In the proposed scheme, we first calculate the distance between the sensor nodes using received signal strength and the Lambert W function and then estimate the propagation delay. Consequently, the neighbor node can set an adaptive network allocation vector timer based on the estimated propagation delay. Our extensive simulation results reveal that the proposed scheme outperforms the distance-aware collision avoidance protocol, the propagation-delay-tolerant collision avoidance protocol, and the maximum propagation delay-based medium access control protocol in terms of network throughput and end-to-end delay. The simulation results also show that the proposed scheme has near-optimal performance compared to the knowledge-based medium access control scheme, which utilizes the location information of each sensor node.
Keywords
Introduction
Underwater acoustic sensor networks (UW-ASNs) have been proposed to support applications for oceanographic data collection, ocean sampling, monitoring pollution and environments, offshore exploration; to prevent disasters; to assist navigation; and for distributed tactical surveillance. 1 Compared with terrestrial wireless sensor networks (TWSNs), which typically use radio frequency (RF) signals, UW-ASNs are characterized by distance-dependent bandwidth, high propagation delay, and severely impaired underwater channels. Under these circumstances, medium access control (MAC) protocols that are already designed and tested for reliable TWSNs cannot be directly adapted because of the unique characteristics of acoustic signal propagation over UW-ASNs.2–5 Therefore, an efficient MAC protocol design is a daunting challenge due to the aforementioned constraints of underwater acoustics, which may highly degrade network performance.
UW-ASNs have received lots of attention, and various solutions have been published in recent years to solve the core problems due to the underwater environment’s unique characteristics. As for MAC protocols, random access-based, schedule-based, and reservation-based MAC protocols have been studied for UW-ASNs.6–8 The random access-based ALOHA protocol cannot effectively reduce collisions among sensor nodes because it does not consider channel status or successful packet delivery to the receiver. Moreover, the ALOHA protocol only considers transmitting the packets to the receiver. The schedule-based MAC protocols like frequency division multiple access are unsuitable for UW-ASNs owing to the severely limited distance-dependent bandwidth of the underwater acoustic (UWA) channel, and time division multiple access shows reduced channel efficiency in a wide range of networks owing to the requirement for longtime guards in the UWA channel. Therefore, the reservation-based MAC protocol can efficiently share the medium and is able to reduce collisions among the sensor nodes by sensing the channel before transmitting data to the receiver. While sensing the channel, if the medium is free, the transmitter will send data packets; otherwise, it defers data packet transmission until the channel becomes free. However, in terrestrial wireless communications networks, carrier sense multiple access with collision avoidance (CSMA/CA) is widely used to reduce collisions among stations by listening to the wireless medium before transmitting the data to the receiver. Therefore, to alleviate collisions caused by propagation delay in transmission, researchers proposed an underwater carrier sense multiple access with collision avoidance (UW-CSMA/CA) MAC protocol.9–11 Under the UW-CSMA/CA MAC protocol, the primary challenge is to optimize the network allocation vector (NAV) timer by estimating the propagation delay between the sensor nodes. The original MAC protocol used the maximum propagation delay to calculate the NAV timer value by considering the maximum transmission range of the source node instead of estimating the propagation delay based on the actual distance between the sensor nodes. Without information on underwater sensor node positions, the calculated NAV duration based on maximum transmission range could block for a long time the neighbor nodes that overheard the request to send (RTS) or clear to send (CTS) control packets, even if data transmission was completed quickly, which may further delay the transmission time of neighbor nodes. Thus, UWA communications need an adaptive NAV timer that can estimate the propagation delay and prevent collisions among the sensor nodes while minimizing the sleep time of the neighboring nodes.
In this article, we propose an adaptive NAV timer–based CSMA/CA MAC protocol for UW-ASNs. In the proposed scheme, we first calculate the distance between the sensor nodes from the received signal strength (RSS) of the receiver and the Lambert W function, and then, we design an adaptive NAV timer for the neighbor nodes using the estimated propagation delay to select the best sleep time to protect the neighbors’ communications. Several distance-extracting techniques for wireless communications already exist, including time difference of arrival (TDoA), time of arrival (ToA), and received signal strength indication (RSSI). TDoA is not applicable in UWA communications because of the high propagation delay, and ToA demands precise synchronization among the sensor nodes, 12 which might not be possible for UWA communications because of the high propagation delay. Thus, an RSS-based technique can be a solution for extracting the distance between the sensor nodes. 13 Therefore, we use an RSS-based distance estimation for UW-ASNs to determine the propagation delay between the sensor nodes and propose an adaptive NAV timer for the neighbor nodes that can minimize the sleep time and provide better throughput and low end-to-end latency. Our proposed adaptive NAV timer–based UW-CSMA/CA MAC protocol can provide near-optimal throughput and low end-to-end delay performance approaching that of the knowledge-based scheme and outperforms the distance-aware collision avoidance protocol (DACAP), 14 the propagation-delay-tolerant collision avoidance protocol (PCAP), 15 and the conventional UW-CSMA/CA MAC protocol.9,10
The rest of this article is organized as follows: We detail some background studies on underwater MAC protocols in section “Related works.” In section “System model,” we briefly discuss the system model, the distance extraction method from the RSS of the receiver, and the propagation delay estimation. We analyze the conventional CSMA/CA MAC protocol for UW-ASNs in section “Conventional CSMA/CA MAC for UW-ASNs” and analyze the proposed adaptive NAV timer–based UW-CSMA/CA MAC protocol using the IEEE 802.11 distributed coordination function (DCF) in section “The proposed adaptive NAV timer construction.” Simulation results of the proposed scheme are evaluated in section “Simulation results.” Finally, our conclusion and future works are drawn in section “Conclusion.”
Related works
There has been intensive study into MAC protocols for TWSNs and UW-ASNs over the last few years. Because of the unique characteristics of acoustic signal propagation in the underwater environment, there are several drawbacks with regard to the existing terrestrial MAC protocol solutions for UW-ASNs. MAC protocols are usually divided into three categories, namely, random access, handshake-based, and schedule-based MAC protocols. A random access MAC protocol cannot effectively deal with collisions among sensor nodes, which is critical for energy-constrained UW-ASNs, because it does not consider whether the medium is either free or busy. In terrestrial wireless communications, a handshake-based protocol called multiple access collision avoidance (MACA) 16 was the first MAC protocol that proposed reserving the channel by sending RTS/CTS control packets between the transmitter and the receiver. However, this algorithm does not solve the exposed terminal problem, especially in an UWA channel where the transmissions are characterized by high propagation delay. MACA for underwater (MACA-U) 17 adopts the MACA protocol for the underwater environment by modifying some of the state transition rules of the original MACA protocol. In MACA-U, the wait timer for CTS from the receiver and the wait timer for receiving the DATA from the source node are calculated by considering the maximum propagation delay, which may provide low throughput and high end-to-end delay in transmission. Nonsynchronized DACAP based on a handshake mechanism was proposed, 14 where the idle period of the sensor node is determined from distance extraction between nodes from the round-trip time of RTS/CTS on the surroundings. To achieve a trade-off that maximizes the throughput of a given network, a minimum handshake length is considered in DACAP, predefined for all sensor nodes, and the distance between the source node and the destination node is computed from the RTS/CTS round-trip time. A PCAP for UW-ASNs was proposed, 15 which allows sensor nodes to transmit another data frame or perform a handshake for the next queue of the data frame while waiting for CTS from another node. The wait time of sensor nodes that are not the receiver is calculated based on the maximum propagation delay, which can further delay the total transmission duration, and provides lower throughput. Floor acquisition multiple access (FAMA) 18 completely prevents packet collisions through adaptation of an RTS/CTS handshake between source node and destination node. In FAMA, the lengths of RTS and CTS packets are greater than the maximum propagation delay and are greater than the length of RTS transmission time along with the maximum round-trip time. However, the FAMA protocol further delays transmission time due to the utilization of a long RTS and CTS control packet transmission to avoid collisions among sensor nodes. In order to reduce high-energy cost of the original FAMA, slotted FAMA was proposed, 19 where the total time is divided into slots to reduce the control packet size. Each slot length of the slotted FAMA protocol is equal to the maximum propagation delay plus the transmission time of a CTS packet. Without information on the actual propagation delay, the slotted FAMA protocol considers maximum propagation delay in the slot length calculation, which results in overhead for packet transmission time, which leads to throughput degradation, and increases the end-to-end delay in overall packet transmission. Similarly, multi-session FAMA (M-FAMA) was proposed, 20 where the wait time of the receiver after RTS from the transmitter is calculated by considering maximum propagation delay based on the maximum transmission range of the transmitter along with RTS control packet transmission duration, which also leads to overhead in overall packet transmission. However, UW-CSMA/CA was also proposed to prevent collisions among sensor nodes during acoustic signal propagation. In UW-CSMA/CA, a control rule, a deferral rule, and a back-off slot time were developed to enhance system throughput, which outperforms the original CSMA/CA protocol. 10 Under the UW-CSMA/CA protocol, the NAV timer is designed based on the maximum propagation delay, which results in additional overhead in the transmission time of the neighboring nodes. Therefore, to alleviate the problem in the UW-CSMA/CA protocol, dynamic network allocation-based (DYNAV) MAC protocol was proposed, 21 and the frame structures were modified with an actual propagation delay, instead of the maximum propagation delay. In the dynamic NAV scheme, the NAV determination algorithm is designed based on the timestamp field in the corresponding frames through assumption of time synchronization among sensor nodes, which is impractical for UWA because of the high propagation delay. Similarly, reservation-based underwater power control (UPC-MAC) was proposed, 22 where packets are classified into RTS, channel state information (CSI), DATA, and acknowledgment (ACK), and the total protocol length (TPL) of one time slot is defined as the summation of the maximum propagation delay, the transmission time of the CSI packet, and the guard time. However, actual acoustic signal propagation through UW-ASNs is severely affected by high propagation delay, which is essential for estimation when designing an efficient MAC protocol in practice. A propagation delay–aware opportunistic transmission scheduling (DOTS) algorithm was proposed 23 to evaluate throughput and energy consumption per sensor node. In DOTS, the propagation delay information and the expected transmission schedule time of the neighbor nodes are learned via overheard passive packet transmission. However, clock synchronization makes it difficult for a sensor node to overhear a transmission for measuring propagation delay and scheduled transmission time. Thus, the assumption of time synchronization among sensor nodes under the DOTS protocol is challenging and costly for UW-ASNs. Similarly, a propagation delay–aware opportunistic MAC protocol for mobile underwater networks with a key assumption of time synchronization among underwater sensor nodes was proposed, 24 which can improve overall throughput by increasing the possibilities of concurrent transmission while reducing collisions among sensor nodes. As is known, the low transmission rate and low preamble of a practical acoustic modem in a real system may degrade the performance of existing MAC protocols. Therefore, a cluster-based on-demand time-sharing (COD-TS) MAC protocol was proposed, 25 where the time synchronization among sensor nodes is assumed in such a way that the sensor nodes can measure the propagation delay between the source node and the neighbor nodes, which is critical for UW-ASNs. A throughput adaptive energy efficient code division multiple access (TAEE-CDMA) protocol for UWA networks is proposed in Ping et al., 26 which shows better performance in terms of energy consumption, time delay, and packet loss rate than pure ALOHA and CDMA. Therefore, an adaptive NAV timer–based UW-CSMA/CA MAC protocol is necessarily needed for UWA communication, which may select the best silent time of the neighbor nodes for protecting neighbor’s communication. In this article, without any time synchronization, we mainly focus on estimating the propagation delay by extracting the distance between sensor nodes from the RSS of the receiver and then design an adaptive NAV timer with the estimated propagation delay to protect the neighbor’s communications.
System model
Acoustic signal propagation losses are classified as spreading and attenuation loss for both deep and shallow-water environments.
27
The attenuation loss includes absorption, leakage from surface ducts, scattering, and diffraction at the surface and bottom of the sea. The parameters in attenuation are classified as transmission medium (i.e. salinity, acidity, pressure, and temperature) and environmental (i.e. air bubbles, sediment absorption, surface reflection, and scattering). Acoustic signals over UW-ASNs are not propagated uniformly from the source node to the destination node. The transmitted acoustic signal of the source node may reflect from the surface of the water and bounce from the bottom of the water in the transmission range of the source node. Consequently, the actual propagated acoustic signal may face severe multipath fading due to the effect of geometric spreading. The geometric spreading increases as the acoustic signal propagation distance increases, and it is independent of the signal frequency. Geometric spreading is further classified as cylindrical or spherical. In spherical spreading, the acoustic signal is propagated omnidirectionally from the source node to the destination node, and in cylindrical spreading, the acoustic sound radiates in the horizontal direction.
28
For distance between the source node and the destination node,


where

Spherical spreading of the acoustic signal through UW-ASNs sufficiently fits measured data underneath an extensive variety of conditions. 27 Therefore, the general transmission loss model for an UWA signal is computed as follows

We assume that an underwater wireless sensor device can measure the RSS of the receiver, which will provide the TL with equation (4). Thus, using the RSS from a receiver, we can extract the variable

By taking the exponential of both sides, equation (5) can be rewritten as follows

By mathematical manipulation, we can rewrite equation (6) as follows

Now, multiplying both sides of equation (7) by

By dividing both sides of equation (8) by u and considering

where w is the Lambert W function, and we will solve this function for the distance, X, which is the distance from the transmitter to the receiver.
The Lambert W function, which is also known as the omega function or product log, is the multivalued inverse of

In equation (10), z indicates the transmission loss of the received signal at the receiver, which is real and positive. The transmission loss in equation (4) can be found from the ratio between RSS and initial signal strength. To find

where

where

RSS at the receiver extracts the distance between two sensor nodes in the transmission range of the source node using equation (13). Calculating the distance between nodes requires the absorption coefficient of the underwater environment, which can be obtained from equation (3). The speed of sound in water varies between 1450 and 1540 m/s, which is four times faster than the speed of sound in the air but still five orders of magnitude smaller than the speed of electromagnetic waves in the air. 29 In other words, the speed of sound in the ocean is an important variable that can change according to the depths of the source node and the destination node. Acoustic signal propagation speed underwater can be directly measured if the ocean temperature, salinity, and depth are known for a region, and the acoustic speed varies with location and the change of the seasons. Thus, a simplified expression of acoustic signal propagation speed underwater was defined by Su et al. 33 as

where

Conventional CSMA/CA MAC for UW-ASNs
CSMA/CA is a MAC protocol that has been widely used in the IEEE 802.11 DCF for wireless sensor networks. If a channel is idle during carrier sensing, it will send an RTS control frame for channel reservation. Otherwise, it will wait for a random back-off time, called the distributed inter-frame space (DIFS), under the DCF. On receiving RTS, the intended destination node sends CTS to the source node after waiting for a short period called the short inter-frame space (SIFS). After receiving CTS from the destination node, the source node will start sending data after the SIFS, and the destination node will start receiving them. If transmission is successful, the destination node sends ACK. Without information about propagation delay, conventional MAC protocols for UW-ASNs set the NAV timer by considering maximum propagation delay based on the maximum transmission range of the source node, which may further delay the transmission time of the neighbor nodes and decrease network throughout. Every neighboring node that overheard RTS, CTS, or DATA is required to stay in an idle period and set its NAV timer as follows



When the NAV duration is calculated based on the maximum propagation delay, neighbor nodes that overheard RTS, CTS, or DATA are virtually blocked for an extended period, which causes a high end-to-end delay in transmission. Thus, it is primarily necessary to adaptively set the NAV timer based on estimating actual distance between the source and the destination nodes, which motivates us to propose an adaptive NAV timer–based CSMA/CA MAC protocol for UW-ASNs. As shown in Figure 1, DCF expresses the TPL (in red dotted line) of the conventional CSMA/CA MAC for one successful transmission, and it can be expressed as follows

where

Conventional CSMA/CA MAC protocol for the underwater environment.
The proposed adaptive NAV timer construction
In the conventional scheme,9,10,21 when the source node sends RTS to the destination node, all those nodes (except the destination node) that overhear RTS remain asleep until the source node finishes its transmission. In this circumstance, the propagation delay between the source node and the destination node is unknown to the neighbor nodes. Consequently, NAV(RTS), NAV(CTS), and NAV(DATA) timers are determined by considering maximum propagation delay during transmission, as in equations (16)–(18). Moreover, the NAV timers for CTS and the DATA are designed by considering a time synchronization concept among sensor nodes, which is critical for UW-ASNs. 21
In the proposed scheme, when the source node has data to send, it will transmit RTS to the destination node and RTS frame carries the information of the DATA duration,


The proposed adaptive NAV timer–based CSMA/CA protocol for the underwater environment.
The neighbor nodes that only overhear DATA can set the NAV timer as follows

By substituting the value of the proposed TPL into equation (21), equation (21) can be rewritten as

where

where

In the proposed scheme, the neighbor nodes which overhear the RTS will maintain a sleep and wake-up scheduling to capture the propagation delay between the source node and the destination node until they overhear the CTS or the DATA packet. The duration that the neighbor nodes overhear the CTS or the DATA is computed as follows

where

Since a CTS or the DATA can be expected to be received during

where

By substituting the expectation of

In the proposed scheme, if the minimum propagation delay

Sleep and wake-up duration of the neighbor nodes.
Finally, the neighbor nodes, which received RTS and missed the CTS during the sleep and wake scheduling, will set the NAV timer for RTS by getting the propagation delay between the source node and the destination node from the DATA header. Then, the NAV timer for RTS can be calculated as follows

Simulation results
In this section, the simulation results are given to show the performance of the proposed adaptive NAV timer–based UW-CSMA/CA MAC protocol. For simulation comparison, we used the proposed adaptive NAV timer–based UW-CSMA/CA MAC (denoted as Proposed scheme) with other schemes, the knowledge-based scheme (denoted as Knowledge-based scheme), the maximum propagation delay-based MAC protocol (denoted as Conventional MAC protocol),9,10 and the DACAP without ACK,
14
and the PCAP.
15
The Knowledge-based scheme has the location information of each sensor node and the propagation delay between the sensor nodes in advance. As a result, the Knowledge-based scheme will provide upper-bound throughput performance and lower-bound end-to-end delay in packet transmissions. The Conventional MAC protocol considers maximum propagation delay in transmission. Therefore, neighbor nodes that overhear RTS, CTS, and DATA set the NAV timer based on the maximum propagation delay in transmission. Also, the timeout timers for returning CTS to the source node, receiving DATA at the destination node, and receiving ACK at the source node are determined based on the maximum propagation delay, which further delays packet transmission. In DACAP, without an ACK, the destination node sends a warning packet after sending CTS. If it overhears another RTS within
Each source node generates event-driven packets according to a Poisson process with a rate of
Simulation parameters.

RTS: request to send; CTS: clear to send; ACK: acknowledgment; SIFS: short inter-frame space; DIFS: distributed inter-frame space; DACAP: distance-aware collision avoidance protocol.
Varying numbers of nodes and packet sizes
In this set of simulations, average packet generation rate

Network throughput according to the number of nodes.

End-to-end delay according to the number of nodes.
Network throughput
Figure 4 depicts the network throughput according to the number of nodes for five targeted schemes: the Conventional MAC protocol, DACAP, PCAP, the Proposed scheme, and the Knowledge-based scheme. We can see that the Proposed scheme with estimated propagation delay between nodes shows near-optimal network throughput performance compared to the Knowledge-based scheme and outperforms DACAP, PCAP, and the Conventional MAC protocol for both packet lengths (200 and 400 bytes). In DACAP, after receiving CTS from the destination node, the source node pauses for an additional wait time, and the destination node sends a warning packet to the source node and if it overhears RTS from another node within a specified period, as introduced above. The source node determines the distance between the nodes by measuring the RTS/CTS round-trip time, which is used to further estimate the wait time. Also, DACAP allows warning packet transmission and reception during actual data packet transmission, which increases the total transmission time. Therefore, DACAP shows lower network throughput than the Proposed scheme for both packet lengths. In PCAP, after sending RTS, it allows an additional wait time to receive CTS, and the wait time under PCAP is calculated based on the maximum propagation delay, which leads to low network throughput. In the Conventional MAC protocol, the nodes that overheard RTS, CTS, and DATA, set the NAV timers by considering maximum propagation delay based on the maximum transmission range of the source node, which results in wasted transmission time for the neighbors and provides the lowest throughput. We can also see that network throughput performance decreases as the number of sensor nodes increases. The reason is that when the number of nodes increases, more interaction overhead is involved in control packet transmission. Therefore, when there are more sensor nodes in communication, packet delivery does not increase, and after taking an average, the network throughput decreases as the number of sensor nodes increases.
End-to-end delay
Since delay is another critical performance metric of UW-ASNs, we compared the Proposed scheme with the Knowledge-based scheme, DACAP, PCAP, and the Conventional MAC protocol for two different packet sizes. As we can see from Figure 5, the Knowledge-based scheme reflects low end-to-end delay because it has the actual positions of the nodes. As a result, the neighbor nodes that overhear RTS, CTS, and DATA set NAV timers with full information about propagation delay. We also observed that the Proposed scheme with estimated propagation shows low end-to-end delay close to the Knowledge-based scheme and lower than DACAP, PCAP, and the Conventional MAC protocol. Under DACAP, even the distance between the source node and the destination node is extracted from the round-trip time of RTS and CTS, but due to an additional warning packet and wait time, it has a high end-to-end delay in packet transmission. Under PCAP, the wait time of the source node is determined based on the maximum propagation delay, which increases end-to-end delay in transmission. Moreover, the Conventional MAC protocol shows a high end-to-end delay in packet transmission because the neighbor nodes set the NAV timer by considering the maximum propagation delay in transmission based on the maximum transmission range of the source node. We can also see that the end-to-end delay increases as the packet size increases because a longer packet size increases the queuing delay on receiving.
Varying numbers of nodes and model noise variance
In this set of simulations, average packet generation rate
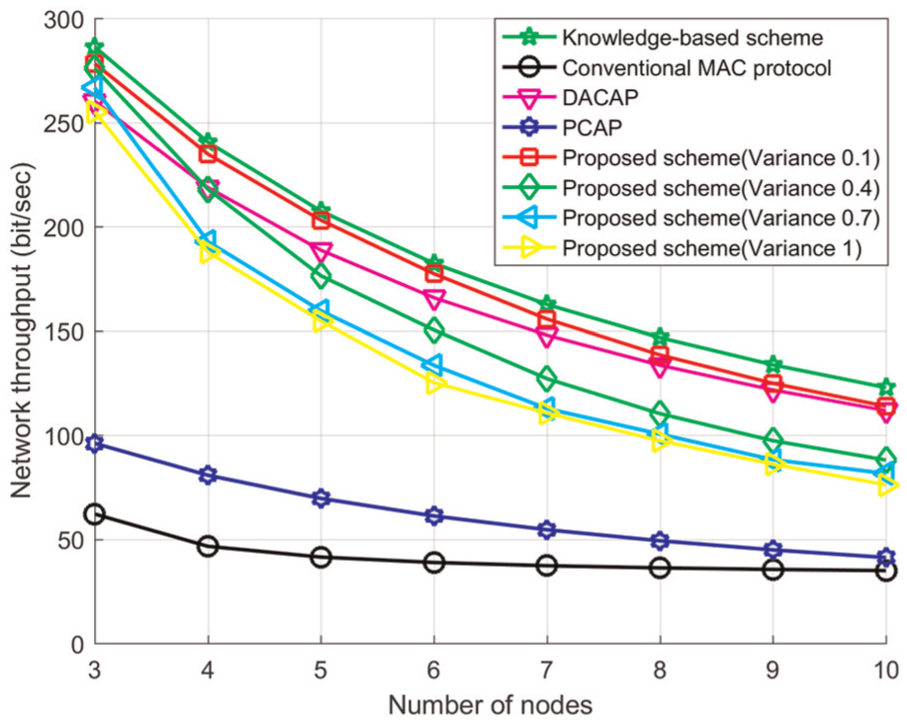
Network throughput according to the number of nodes and the variances.

End-to-end delay performance according to the number of nodes and the variances.
Network throughput
Figure 6 shows the network throughput with varying numbers of nodes for the Knowledge-based scheme, the Proposed scheme, DACAP, PCAP, and the Conventional MAC protocol when the packet size is 200 bytes, and event-driven traffic is generated by the source node with an average packet generation rate of 0.5 packets/s. The network throughput of the schemes above degrades as the number of nodes increases. The reason is that by increasing the number of nodes, more interaction overhead is involved in control packet transmission, which degrades network throughput. The Proposed scheme shows a negligible network throughput performance gap along with the Knowledge-based scheme when variance
Note from Figure 6 that as the variance increases, the performance gap between the Proposed scheme and the Knowledge-based scheme also increases. The reason is that when the variation of the transmission loss model increases, the distance estimation error increases. Therefore, network throughput performance decreases for a higher variance, which is contrary for a lower variance. However, the distance between the source node and the destination node is determined by the round-trip time of RTS transmission and CTS reception under DACAP due to an additional warning packet, and the wait time and the total transmission time increase. Consequently, network throughput decreases. Under PCAP, after sending RTS, a node waits a specified time, and the wait time of this protocol is calculated by considering maximum propagation delay, which leads to lower network throughput.
End-to-end delay
Figure 7 shows the end-to-end delay from varying the number of nodes for the Knowledge-based scheme, the Proposed scheme, DACAP, PCAP, and the Conventional MAC protocol when the packet length and the packet generation rate are 200 bytes and 0.5 packets/s, respectively. We compared the end-to-end delay of the Proposed scheme with DACAP, PCAP, and the Conventional MAC protocol with different values for model noise variance. The end-to-end delay of the schemes, as mentioned above, increases as the number of nodes increases. The reason is that as the number of nodes increases, the control packet transmission overhead also increases, which exhibits a high end-to-end delay in transmission. However, the Proposed scheme shows low end-to-end delay nearer to the Knowledge-based scheme due to the reasons already discussed in section “End-to-end delay.”
Varying packet generation rate and packet sizes
In this set of simulations, the packet generation rate varies from 0.02 to 0.3 packets/s, and the model noise variance,

Network throughput performance according to the packet generation rate.

End-to-end delay performance according to the packet generation rate.
Network throughput
Figure 8 depicts the network throughput with varying packet generation rates for the five target MAC protocols: the Conventional MAC protocol, DACAP, PCAP, the Proposed scheme, and the Knowledge-based scheme. We can see that the Proposed scheme achieves near-optimal network throughput, compared to the Knowledge-based scheme for both packets sizes (200 and 400 bytes), and outperforms DACAP. As mentioned above, DACAP allows an additional wait time and a warning packet, which increases the TPL and decreases network throughput. We can also see that PCAP and the Conventional MAC protocol show lower network throughput than the Proposed scheme and the Knowledge-based scheme. The reason is that without information about the propagation delay, the Conventional MAC protocol sets the NAV timer by considering maximum propagation delay between the source and destination nodes based on the maximum transmission range of the source node. Under PCAP, after sending RTS, the source node waits an additional time period based on maximum propagation delay; as a result, it delivers low network throughput. From Figure 8, we can also conclude that when the packet generation rate reaches 0.12 packets/s, the network throughput of the schemes mentioned above becomes flat. The reason is that the sensor nodes that have data to transmit reach the maximum number of retries. Therefore, network throughput remains the same, even if the packet generation rate increases.
End-to-end delay
To evaluate the end-to-end delay performance of the Knowledge-based scheme, the Proposed scheme, DACAP, PCAP, and the Conventional MAC protocol, we varied the packet generation rate from 0.02 to 0.2 packets/s, and the packet sizes are 200 and 400 bytes.
Figure 9 illustrates the end-to-end delay from varying the packet generation rate for the Knowledge-based scheme, the Conventional MAC protocol, DACAP, PCAP, and the Proposed scheme. This figure shows that the end-to-end delay increases as the packet generation rate (packets/s) increases. As we can see, the Proposed scheme shows low end-to-end delay nearer to the Knowledge-based scheme at the two different packet lengths. The reason is that the distance extraction technique estimates the propagation delay between sensor nodes from the RSS of the receiver. As mentioned earlier, DACAP allows an additional warning packet and wait time in the protocol stack, which increases the end-to-end delay in transmission. In contrast, without having information about the propagation delay, the Conventional MAC protocol sets the NAV timer by considering the maximum propagation delay, which increases the end-to-end delay in transmission. Also note that the end-to-end delay of the schemes, as mentioned above, does not increase infinitely but approaches a constant. The reason is that the Knowledge-based scheme, the Conventional MAC protocol, DACAP, PCAP, and the Proposed scheme reach the maximum number of retries. Therefore, each node can deliver the same number of packets, which provides a constant end-to-end delay in each run.
Varying packet generation rate and model noise variances
In this set of simulations, the packet generation rate varies from 0.02 to 0.3 packets/s. We compared the Proposed scheme by taking different values of model noise variance, such as 0.1, 0.4, 0.7, and 1. The packet size for this set of simulation is 200 bytes. The obtained simulation results are shown in Figure 10 and Figure 11.

Network throughput performance according to the packet generation rate and variances.
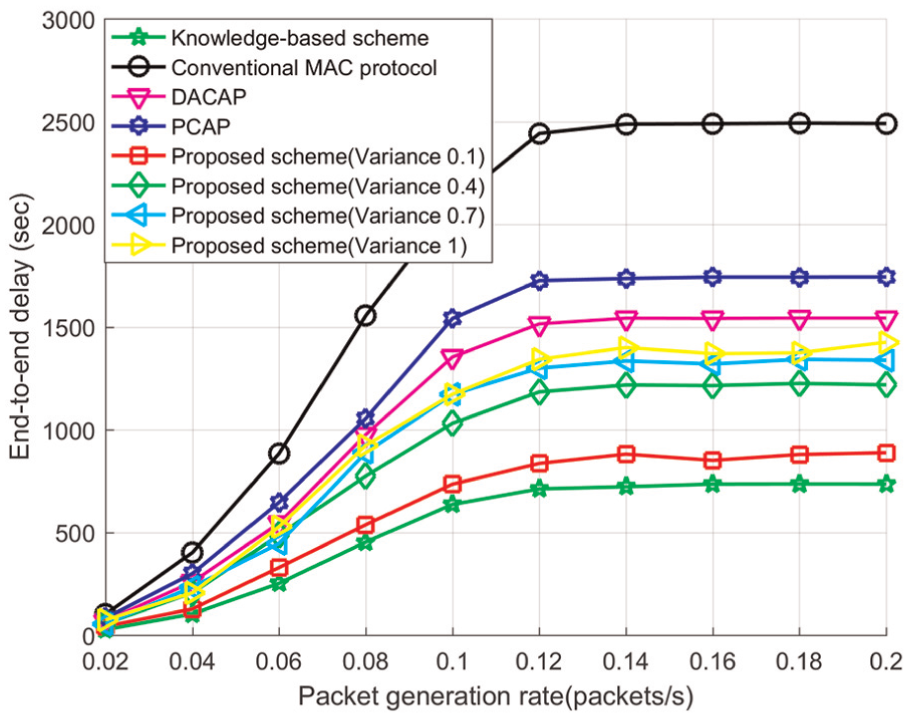
End-to-end delay performance according to the packet generation and variances.
Network throughput
Figure 10 depicts the network throughput from varying the packet generation rate for the five target MAC protocols: the Conventional MAC protocol, DACAP, PCAP, the Proposed scheme, and the Knowledge-based scheme. We can see that the Proposed scheme achieves near-optimal network throughput, compared to the Knowledge-based scheme when the model noise variance is 0.1. Also note from this figure that as the variance increases, the performance gap between the Proposed scheme and the Knowledge-based scheme also increases. The reason is that when the variance of the transmission loss model increases, the distance estimation error also increases. As a result, the performance gap increases. DACAP, PCAP, and the Conventional MAC protocol show lower network throughput than the Proposed scheme and the Knowledge-based scheme. The reasons for network throughput degradation were already discussed in section “Network throughput.” The network throughput curve of the schemes above becomes flat when the packet generation rate reaches 0.12 packets/s because the sensor nodes that have data to transmit reach the maximum number retries. Therefore, the network throughput remains the same, even if the packet generation rate increases.
End-to-end delay
Figure 11 shows the end-to-end delay from varying the packet generation rate from 0.02 to 0.2 packets/s for the Knowledge-based scheme, the Proposed scheme, DACAP, PCAP, and the Conventional MAC protocol when the packet size is 200 bytes, and event-driven traffic is generated by the source node. We compared the end-to-end delay of the Proposed scheme with the Knowledge-based scheme, DACAP, PCAP, and the Conventional MAC protocol with different values of model noise variance
Conclusion
In UW-ASNs, high propagation delay is a key challenge to designing an efficient propagation UW-CSMA/CA MAC protocol. In this article, we proposed an adaptive NAV timer–based UW-CSMA/CA MAC protocol with propagation delay estimation by constructing an adaptive NAV timer for neighbor nodes based on extracting the distance between nodes from the RSS of the receiver. Our proposed adaptive NAV timer–based CSMA/CA MAC lets neighbors select the best sleep time to protect ongoing transmissions. Extensive simulation results showed that the proposed scheme outperforms DACAP, PCAP, and the conventional MAC protocol under different representative simulation scenarios. Even though the proposed scheme has some performance gaps compared to knowledge-based schemes, for packet transmission, it does not require any location information in advance. Therefore, future work will include appropriate distance estimation by implementing Kalman or particle filters, evaluation of the propagation model, and tests of the protocol with field experiments.
Footnotes
Academic Editor: Jaime Lloret
Authors’ contributions
I.K. provided the guideline to focus on issues, requiring solutions, and reviewed the overall manuscript. M.A.R. and Y.L. conceived the study, drafting the article, revising it critically for intellectual content of the whole manuscript. They reviewed the technical contribution of the work and approved the final. All authors read the full manuscript and approved for final submission.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Research Foundation (NRF) of Korea funded by the MEST (NRF-2015R1A2A1A15053452) and by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (2016R1A6A3A11932461).