
Abstract
Radio frequency device-free localization based on wireless sensor network has proved its feasibility in buildings. With this technique, a target can be located relying on the changes of received signal strengths caused by the moving object. However, the accuracy of many such systems deteriorates seriously in the environment with WiFi and the multipath interference. State-of-the-art methods do not efficiently solve the WiFi and multipath interference problems at the same time. In this article, we propose and evaluate an adaptive weighting radio tomography image algorithm to improve the accuracy of radio frequency device-free localization in the environment with multipath and different intensity of WiFi interference. Field experiments prove that our approach outperforms the state-of-the-art radio frequency device-free localization systems in the environment with multipath and WiFi interference.
Introduction
In recent years, localization awareness applications have been attracting more and more attentions. Global positioning system (GPS) is used for outdoor environment navigation. Radio frequency identification (RFID) and radio frequency (RF) are adopted for indoor localization and asset tracking. All the aforementioned techniques belong to the active localization, which can only work with the cooperation of the objects, carrying the electronic device.1–3 However, these techniques cannot be used in scenarios where the objects do not wish to take any electronic device (e.g. terrorist attack, criminal behavior, and patients in the hospital). For this reason, Radio Frequency Device-free Localization (RFDFL) is adopted to locate the object without attaching any electronic tags.4–6 This technique has proved its feasibility in fall detection, 7 roadside surveillance, 8 ambient assisted living 9 non-invasive breathing monitoring, 10 residential monitoring, 11 and multi-object localization. 12 Compared with the traditional security schemes (i.e. ground patrols and aerial surveillance from manned or unmanned aircraft), RFDFL can be used for illegal abroad crossings surveillance in a resource-intensive and a low-cost way. 8
Compared with other device-free localization (DFL), RFDFL can be utilized to locate/track objects in the environment with obstruction and without illumination. In addition, this technique has no invasion of privacy. Compared with the infrared system and radar system, it can monitor larger area. What’s more, it is much cheaper than the ultra wideband system.4,5,13 The essence of RFDFL is that wireless sensor nodes are deployed around the perimeter of the monitored area, each sensor takes turns to send packets to all other sensors at a high frequency. The received signal strength (RSS) of the communication link will be attenuated because of the obstruction of the object in the monitored area. By observing attenuations of all links, RFDFL is able to extract the location of the object by analyzing the changes in the RF propagation field of the located area. 4
For RFDFL systems, there are three widely utilized methods including the fingerprint method,6,13 the Bayesian inference approaches (e.g. Sequential Monte Carlo method), 5 and the imaging approach referred to as the radio tomographic imaging (RTI).4,14 For the fingerprint method, it needs an offline phase, which is used to collect the radio maps when the object stands on different predetermined locations, and then the system maps the estimated location to one of the trained locations based on the changes of the communication link RSS, the closest matching is utilized to refer to as the object’s location during the online phase. In order to achieve a stable accuracy, the offline phase should be repeated when the radio transmission environment changes, which is really time- and manpower-consuming. The Bayesian inference approach relies on recursive computation of the large number of particles, which is not applicable to real-time localization. In RTI, a radio tomography image inferring the object’s location can be obtained by analyzing the attenuation of all radio links in the monitored area. It has been proved that it is an efficient way for localization through the wall, monitor or locate a breathing in the residential area.
Radio signal (2.4 GHz) is more sensitive than any other frequency signals. 15 The reason is that the resonant frequency 2.4 GHz frequency and water are the same and more than 70% of the human body is omposed of water. Thus, 2.4 GHz radio signal is more sensitive than any other frequency signals. 15 The state-of-the-art RFDFL systems 4,5,14,16,17 extensively use 2.4 GHz (IEEE 802.15.4 compliant) sensor nodes to locate the object. Consequently, the problems at hand are twofold. First, how to guarantee the accuracy of RFDFL localization under WiFi interference. WiFi networks share the same operating frequency with IEEE 802.15.4 sensor network. The burst and concurrent communication of WiFi networks lead to severe interference to 2.4 GHz sensor network, resulting in serious packet drops.18,19 If packet drops, RFDFL cannot obtain the real-time RSS measurement of radio links. Instead, it uses the previous RSS measurement to calculate the object localization, which introduces a large location error. 20 However, state-of-the-art methods cannot solve this problem. Second, multipath interference also degrades the accuracy of RFDFL severely. The state-of-the-art RFDFL assumes that the obstruction of the object attenuates the RSS of the radio link. However, the RSS at the receiver is determined by the summation of radio waves phasor from multipath. Therefore, RSS variance introduced by a human or an object is probably to be increased, reduced, or constant. This is highly related to the transmission RF. For a given link, if the chosen RF is not the one attenuated by the object, it will cause large accuracy errors. Although there is research work presenting solution to this problem, it is still not sufficiently settled.
In this article, we propose a novel adaptive channel weight model to solve these problems at the same time. First, we obtain the fade level of each measurement channel for every communication link during the calibration time. Second, the real-time packet drop rate (PDR) of the measurement channels can be calculated with an online observation window. Then, we propose an adaptive channel weight model to obtain the adaptive weight for each measurement channel, by fusing the two aforementioned factors. Due to considering both the WiFi interference and multipath interference, we benefit from the adaptive channel weight model in the environment with multipath and WiFi interference.
The rest of the article is organized as follows: section “Related work” discusses the related work. In section “Adaptive weighting RTI,” shadowing-based RTI is introduced. The influence factors to the accuracy of RFDFL and our new adaptive weight model are presented in section “Experiments.” Section “Experiments” describes the experiment setup and shows our experimental results. Finally, the article is concluded in section “Conclusion.”
Related work
In this section, we review the previous works related to RFDFL methods and the accuracy enhancement of RFDFL with wireless sensor network. The fingerprint model6,21,22 is composed of the offline phase and the online phase. During the offline phase, a radio map is generated for predetermined location of the target and stored in the database. During the online localization, the obtained radio map is compared with the stored radio maps. The closest matching is used to infer the target’s location. The scalability of this method is very limited. If the topology of the WiFi network is changed, the offline phase must repeat, which is a very time-consuming process. Chen et al. 5 proposed to use Sequential Monte Carlo algorithm for DFL. This method suffers from intensive computation and is not suitable for real-time localization. In 2010, Wilson and Patwari 4 introduced the RTI method for DFL,4,16,23–25 which is more effective. They localize the target in the RF propagation area using attenuation of RSS values caused by the target. However, all RTI methods are based on 2.4 GHz IEEE 802.15.4 sensor network and their accuracy is not only highly influenced by multipath interference but also WiFi interference, which are not well addressed in the previous work. Kaltiokallio et al. 23 proposed to use the multi-channel mechanism to stand up to multipath interference in the indoor environment. In this method, all sensor nodes operate on multi-channel. Each communication link ranks the channels from anti-fade to deep fade based on the fade level. The measurement of the top m (set by users) anti-fade channels were used for RTI localization. Their later work in Bocca et al. 12 weights all the measurement channels based on their fade level to improve the localization accuracy. However, WiFi interference is not considered in both of the works. Anti-fade channels may suffer from severe PDR and lose extreme important localization information because of the WiFi interference. In Zhao and Patwari, 24 although subspace decomposition method is adopted to improve the localization accuracy by reducing the effect of the environment noise (e.g. vibration of tree branches, wind blowing) on the RSS value, multipath and WiFi interference are still not addressed. Their later work in Zhao et al. 16 presents a method to improve the localization accuracy by calculating kernel distance. With this method, the kernel distance between a long-term histogram and a short-term histogram is adopted to obtain the temporal RSS changes caused by the target. However, they only use channel 26 of 2.4 GHz sensor network for RFDFL which is assumed not to be interfered by WiFi network. To improve accuracy, a multi-scale spatial weight model is proposed in Kaltiokallio et al., 25 where different spatial weights are assigned to each link based on the fade level. However, deterioration of localization accuracy caused by WiFi interference is not taken into consideration. Similarly, dual-band sensor network only solves the problem of WiFi interference, the accuracy deterioration caused by multipath is still not efficiently solved. 20
Adaptive weighting RTI
Characteristics of the RSS in the WiFi environment
In order to clarify the effect of the WiFi interference on the localization accuracy and determine the main reason leading to deterioration of the localization accuracy, we extract the following data under different intensity of WiFi interference during the experiment: PDR of each communication link working on channel 18, and the localization accuracy of RFDFL operating on channel 18 as shown in Figure 10. Clearly, we can see that the PDR and the accuracy of RFDFL are both deteriorated and have the same trend. In fact, we also obtain the similar experiment results with channel 26. For simplicity, only the results using channel 18 are shown here. The experimental setup is described in detail in section “Experimental setup.”
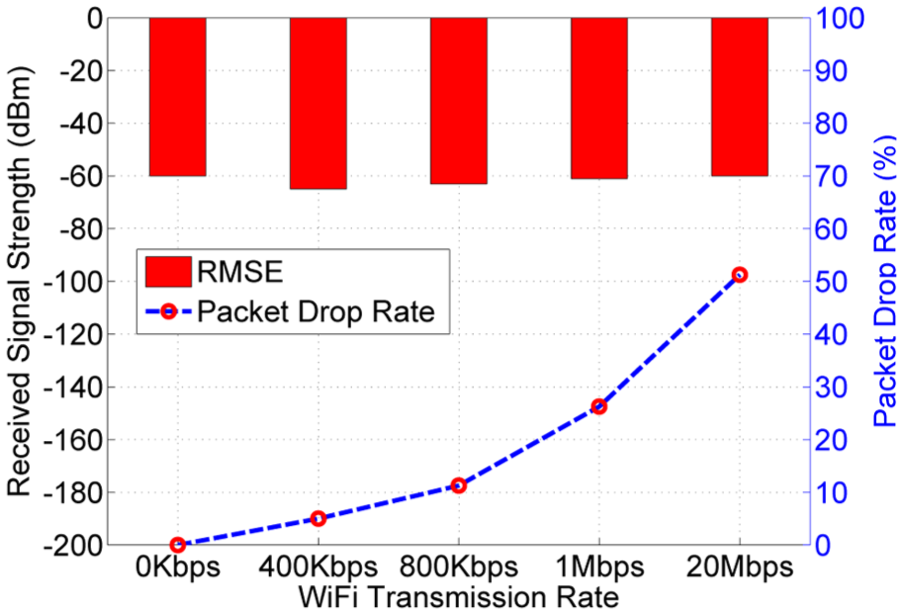
In RFDFL systems, the RSS variance caused by obstruction of the object is used to do localization. The one and only reasonable explanation to deterioration of RFDFL accuracy is that the variance of RSS is not aroused by the object, but the WiFi interference. As shown in Figure 1, we use different WiFi transmission volume to indicate diverse intensities of WiFi interference. 26 Clearly, the accuracy of RFDFL becomes worse with the increase in the WiFi interference, as shown in Figure 1.

The changes of PDR and accuracy of RFDFL system working on IEEE 802.15.4, with WiFi interference increasing.
Intuitively, accuracy of RFDFL has tight relationship with PDR because PDR holds the same trend as the accuracy of RFDFL under WiFi interference. To further verify this, the real-time sampling RSS values and their corresponding variance are shown in Figure 2. From this figure, it can be seen that WiFi interference almost has no obvious influence on changes of RSS itself. Based on the aforementioned analysis, PDR is the main reason to decrease the accuracy of RFDFL. In other words, if the packets are dropped, RFDFL cannot obtain the up-to-date RSS values, which comprise the location information of the object at this moment. Instead of using the up-to-date RSS values, the previous RSS measurements are used to extract the location of the object by RFDFL. Hence, the main reason causing the deterioration of RFDFL accuracy is not the variance of RSS value, but rather PDR caused by WiFi interference. So, it is reasonable for us to utilize PDR of IEEE 802.15.4 communication link to represent the intensity of WiFi interference and adopt the criterion of PDR to choose the most robust communication channel for each of the communication link.
RSS and PDR of 2.4 GHz communication link working on channel 18 under different intensity of WiFi interference.
Characteristics of the RSS in multipath environment
Fade level 23 is used to depict the relationship between steady-state, narrow-band fading and variance of RSS introduced by human body’s obstruction on the radio communication link. The metric of the fade level categorizes the communication channels of a given link into two extremes: deep fade channel and anti-fade channel. For the link operating on the deep fade channel, the RSS, on average, increases when the object obstructs the link. Additionally, the presence of the object, which is even far away from the link, will result in obvious RSS changes in deep fade channel (e.g. channel 15 as shown in Figure 3). In contrast, the RSS value of anti-fade channel, on average, attenuates when the object obstructs the link. In addition, the RSS of anti-fade channel will not change until the target is in proximity to the link (e.g. channel 11 and channel 18 as shown in Figure 3). Because of more precise position of the human are contained in the anti-fade channel, thus, we can achieve more accurate result, if all communication links in RFDFL adopt their corresponding anti-fade channel. Mathematically, the fade level can be expressed as follows 23

where
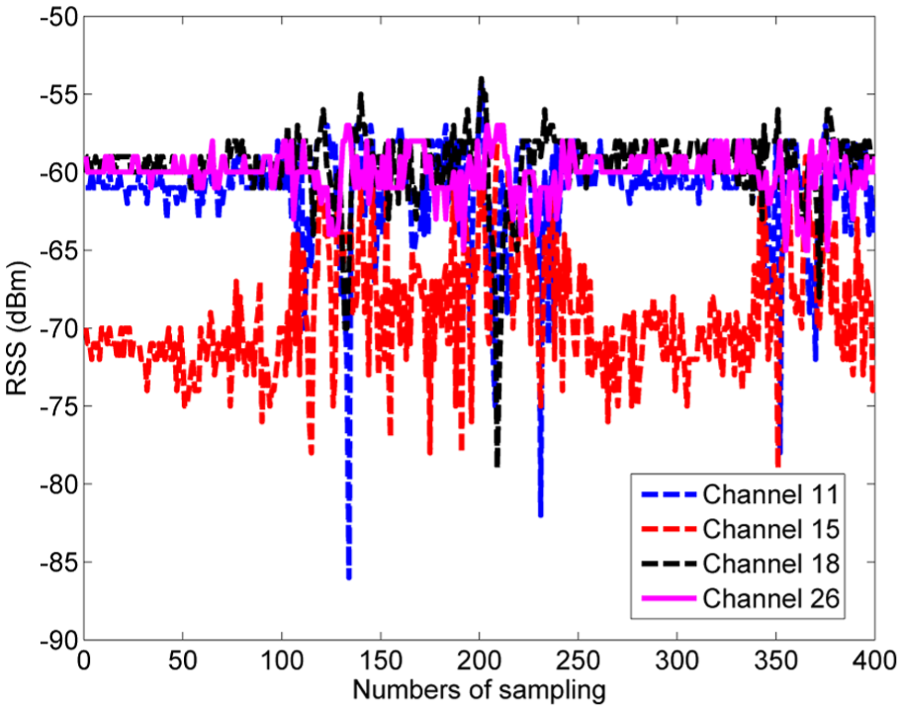
RSS of 2.4 GHz communication link operating on different channels in indoor environment (with a person existence).
Then, the fade level can be expressed as

For IEEE 802.15.4-complaint sensor network, it has 16 frequency channels spanning over 80 MHz band, with only 5 MHz frequency interval.
28
Thus, the large scale path loss

In practice, because

where for the link i, the channel
Based on the aforementioned analysis of fade level, we know that the anti-fade channels are more informative than the deep fade channels for RFDFL in the environment with multipath interference because of its restrictive sensitivity area to human body obstruction. However, all IEEE 802.15.4 channels (channels 11–26) are overlapped by IEEE 802.11 WiFi networks. For RTI systems, even though most anti-fade channels are selected for localization during the calibration time, they have quite high probability interfered by WiFi signals operating on the adjacent channels, which results in severe PDR of the most anti-fade channel and location information loss, which lead to deteriorative localization accuracy.
Adaptive channel weight model
WiFi networks share the same operating frequency with IEEE 802.15.4 sensor network. The burst or concurrent communication of WiFi networks lead to severe interference to 2.4 GHz sensor network resulting in serious packets drops, which causes the RFDFL cannot obtain the up-to-date measurement of communication link, and results in the deterioration of localization accuracy of RFDFL.
In addition, multipath is another severe problem, which should be taken into consideration. The state-of-the-art RFDFL assumes that the obstruction of the human body attenuates the RSS of radio link. However, RSS variance introduced by the human in the multipath environment is probable to increased, reduced, or constant. This is highly related to the transmission RF. For a given link, if the chosen radio channel is not the one attenuated by the object, it will cause large accuracy error.
The state of the art does not settle the aforementioned problems efficiently at the same time. Considering both the WiFi interference and multipath interference simultaneously, we propose a combined weight model (seen in Formula (6)) to assign different weights to each channel according to the intensity of multipath and WiFi interference. Specifically, for the communication link i, working on n different channels (

where

where

Here,

Measurement model of the RTI
In RTI, 2.4 GHz sensor nodes are deployed around the monitored area and form an observation area. Logically, RTI splits the monitored area into small voxels. For a given link, the change of RSS is assumed to be the accumulation of all the small voxels of the monitored area. Some voxels contribute to the link, whereas others do not. Mathematically, it can be expressed as

where

where

Weight model.
Mathematically, if we consider all the communication links, RSS changes of all the communication links in the radio propagation field can be expressed as 4,29,30

where
RTI estimates the location of the object according to the value of the voxel. The coordinator of the voxel with maximum value in

where

in which

where
RTI parameters.

RTI: radio tomographic imaging.
Experiments
Experimental setup
In order to evaluate the effect of the adaptive weighting RTI algorithm, we implemented the experiments in the Internet of Things (IOT) exhibition hall of China University of Mining and Technology (CUMT) during the midnight, when there is almost no WiFi interference.
Figure 5(a) shows a picture of the experiment environment. A total of 20 USB dongles with IDs, from 0 to 19, are distributed along the perimeter of a rectangular area as shown in Figure 5(b). Each USB dongles (seen in Figure 6) is put on a tripod at a height of 1.2 m, as given in Figure 5(a).

Experiment layout and environment: (a) environment and (b) layout of the experiment, distance between two node is set to 1.2 m.

Wireless sensor node (CC2531 USB Dongle).
At the beginning of the experiments, 40-s calibration time is needed to obtain the mean RSS value on each communication link without any person in the monitoring area. During the experiments, a person stands at 24 pre-marked locations as shown in Figure 5(b). Figure 5(b) shows the distribution of 20 USB dongles operating on 2.4 GHz band 31 with IDs from 0 to 19. The USB dongles are put on a tripod, as shown in Figure 6. Figure 5(a) gives a picture of the experimental environment.
Each USB dongle working at 2.4 GHz is composed of a CC2531 microchip. Their transmission power is 4.5 dBm. They all run the multi-spin communication protocol 4 for communication. The procedure of Spin is that all nodes in network take turns to transmit data according to their node IDs, which is programmed beforehand. At any particular time, only one node is transmitting while the others are listening. When a packet is dropped or a node fails to transmit, a timer will fire to make sure that the next node moves on. At the end of each communication cycle, all nodes switch synchronously to the next channel. The available channels are pre-defined. Channels 11, 18, 21, and 26 are used in our experiment.
To generate different intensities of WiFi interference, we followed the same approach as in Liang et al. 19 We used two laptops and one WiFi access point to build a WiFi network. One laptop acted as a server, while the other one used the iperf tool 32 to produce different intensities of WiFi interference by requesting different transmission rates from the server, as shown in Figure 7.

The topology of WiFi interference network.
Results and discussion
In this subsection, we focus on evaluating the performance of the adaptive weighting RTI algorithm using the aforementioned experimental setup. The experimental results show that our adaptive weighting RTI algorithm outperforms the state of the art.
In the following experiments, the intensity of WiFi interference was set to 0 kbps, 800 kbps, 1 Mbps, 2 Mbps, 4 Mbps, 6 Mbps, and 10 Mbps, respectively. As shown in Figure 8, PDR of each communication link (working on channel 18) between the 1st node and the others (e.g.

Packet drop rate of each communication link (on channel 18) between the 1th node and the others under different WiFi interference.
Clearly, we can see that PDR of the communication link reflects the WiFi interference strength. Due to the relationship between the accuracy of RFDFL system and PDR (seen in Figure 1), more accurate localization results can be obtained, by assigning higher weights to the communication channels according to the PDR.
As shown in Figure 9, we evaluate the performance of our adaptive weighting RTI. With the increase in the WiFi interference, our adaptive weighting RTI can adjust the usage percentage of each channel, adaptively. For example, because of suffering from different intensity of WiFi interference, the usage ratios of channel 18 is 29.47% in the environment without WiFi interference and drops to 2.63% when the intensity of WiFi interference is 10 Mbps. At the same time, the usage percentages of the other three channels increase accordingly.

Channel distribution of the IEEE 802.15.4 sensor network under different intensities of WiFi interference.
We can also see from Figure 9 that the usage ratios of each channel are 37.89% for channel 11, 29.47% for channel 18, 24.74% for channel 21, and 7.89% for channel 26, respectively, in the environment without WiFi interference (0 kbps). According to the work in Kaltiokallio et al., 23 the aforementioned percentages keep the same, no matter how strong the WiFi interference is in the environment. Due to the reason that no WiFi interference was taken into consideration, the localization accuracy of multi-channel RTI deteriorated severely, from 0.4435 m (without WiFi interference) to 0.990 m (with 10 Mbps WiFi interference), a 123.3% deterioration, as shown in Figure 10.

The localization accuracy comparison between the adaptive weighting RTI algorithm and the multi-channel RTI.
In addition, we can see that our adaptive weighting RTI model is able to change the usage percentage of each channel according to the intensity of WiFi interference. As shown in Figure 9, channel 18 is not always the best measurement frequency for some communication links because of the WiFi interference. Its usage ratio changes dynamically according to the WiFi interference. The stronger the WiFi, the smaller the usage ratio. For example, the usage ratios of channel 18 is 29.47% in the environment without WiFi interference and dropped to 1.84% in the environment with 10 Mbps WiFi interference. Accordingly, the usage ratio of channels 11, 21, and 26 increases by 12.11%, 7.90%, and 7.62%, respectively.
As shown in Figure 10, the localization accuracy of the adaptive weighting RTI is 0.5941 m, a 4.51% improvement compared with the multi-channel RTI, 23 in the environment with 1 Mbps WiFi interference. Although the localization accuracy of adaptive weighting RTI also becomes worse with increasing of the WiFi interference, the adaptive weighting RTI outperforms the multi-channel RTI in all WiFi interference scenarios. The reason is that the adaptive weighting RTI can not only dynamically rank the measurement channel for each communication link according to the combination weight (as described in section “Adaptive channel weight model”) but also utilizing the measurement information of all channel by assigning the combination weight.
We also present more detailed views of localization data in Figures 11–13. Figures 11(a) and (b) and 12(a) and (b) show the relationship between the estimated and the actual localization. In general, the estimation results from adaptive weighting RTI are closer to the known locations than that from multi-channel RTI (seen in Figures 11(a) and (b) and 12(a) and (b)). What’s more, radio tomography images from adaptive weighting RTI (seen in Figures 11(d) and 12(d)) also outperform the results in multi-channel RTI (seen in Figures 11(c) and 12(c)), respectively. From the view of the cumulative distribution functions (CDFs), as shown in Figure 13, we can also benefit from the adaptive weighting model. Such as, in the environment with 2 Mbps WiFi interference, for the adaptive weighting model, 95% of localization errors are below 1 m, while 79% of errors from multi-channel are below 1 m, a 16% improvement.
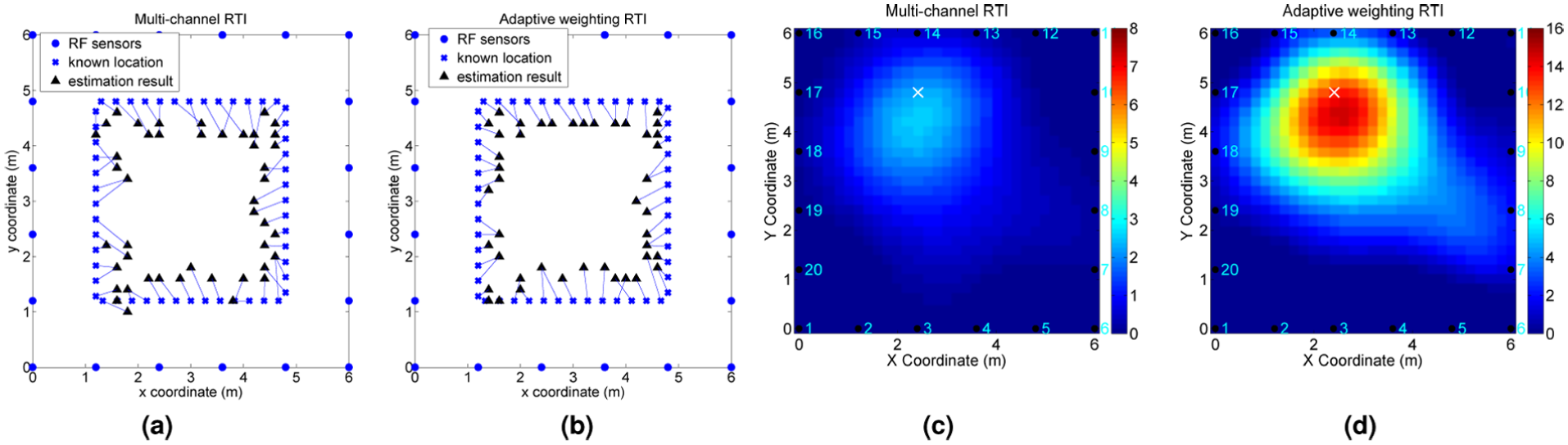
Experiment results in the environment without WiFi interference: (a) channel diversity RTI layout, (b) adaptive weighting RTI layout, (c) multi-channel RTI, and (d) our adaptive weighting RTI.
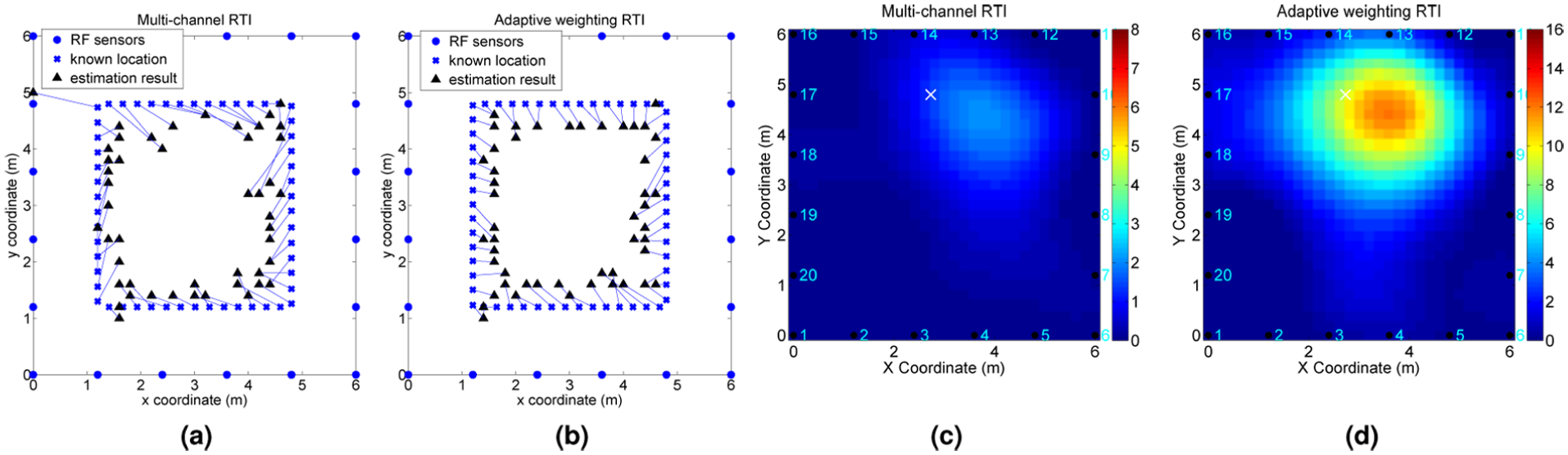
Experiment results in the environment with 2M WiFi interference: (a) channel diversity RTI layout, (b) adaptive weighting RTI layout, (c) channel diversity RTI, and (d) our adaptive weighting RTI.

Cumulative distribution functions (CDFs) of localization errors: (a) CDFs in the environment without WiFi interference and (b) CDFs in the environment with 2 Mbps WiFi interference.
Conclusion
In this article, we introduced an adaptive weighting RTI to improve the accuracy of RTI in the environment with multipath and WiFi interference. In order to locate the target more accurately, we proposed the adaptive weighting RTI method relying on the adaptive channel weight, which is determined by the fade level and the PDR. Extensive experimental results show that our adaptive weighting RTI outperforms the method by channel diversity. In the environment without WiFi interference, there is still an improvement of 4.9%. The stronger the WiFi interference in the multipath environment, the better performance we can obtain from the adaptive weighting RTI (e.g. the improvements of 5.23%, 10.58%, and
Footnotes
Acknowledgements
The authors would like to thank Chih-Ming Hsieh, Sammer Srouji, and Farzad Samie Ghahfarokhi from Chair for Embedded Systems in Department of Computer Science of KIT-Karlsruhe Institute of Technology Germany for their contributions to this work.
Academic Editor: Shinsuke Hara
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to thank the financial support by Jiangsu Province Science Foundation for Youths (BK20160841) and the financial support of the Fundamental Research Funds for the Central Universities of China, grant No. 30915118817.