Congestion control in cluster wireless multimedia sensor networks is capable of delivering and gathering multimedia information, while propagation delay and external interference may cause it unable to achieve the maximal network throughput without congestion control. To solve the problem, based on the additive-increase multiplicative-decrease adjustment strategy, a robust congestion control model is proposed with a scheduling scheme in cluster wireless multimedia sensor networks considering the neighbor feedback. The robust congestion control model is a Lur’e-type system. The cluster wireless multimedia sensor network is capable of achieving the desired cluster synchronization with network parameters provided by Lyapunov–Krasovskii functionals. Sufficient conditions of the robust congestion control are formulated by linear matrix inequalities. Numerical results show the effectiveness of the proposed scheme.
Wireless multimedia sensor networks (WMSNs) consist of interconnected sensor nodes that are capable of continuously retrieving multimedia content such as video and audio streams, images, and sensor data.1–3 Excessive amount of data transmission in CWMSNs may cause network congestion,4,5 and many recent researches1–3,6–10 concern this issue and come up with congestion control schemes to solve this problem,11,12 where traditional source-side congestion control methods such as active queue management (AQM),13,14 random early detection (RED),15,16 and additive-increase multiplicative-decrease (AIMD)17,18 are applied. However, the traditional ones do not guarantee network congestion control stability. The stability control aims at maximizing the network throughput and keeps network parameters stable at the optimal states.19–21 It is essential to more effectively control network congestion and keep network stable.
This article focuses on upgrading the network throughput and keeping the network parameters stable at the optimal states. A weighted fair scheduling scheme is proposed to pre-arrange the weight of the network parameters for maximizing the network throughput, and the main difficulties lie in keeping the network parameters stable at the optimal states in the presence of propagation delay and external interference. The “cluster synchronization” is introduced to more conveniently depict the network stability. Cluster synchronization means that the sending rate of each source node in a cluster reaches a stable weighted fairness to maintain network stability.
Propagation delay and external interference are the two key factors that affect cluster synchronization of the CWMSN. The presence of propagation delay causes increment of network cost and unreliability,22 and dynamic external interference in wireless environments leads to network instability.23 The two factors make cluster synchronization more difficult to be achieved by simple stability controls which are even inadequate for tackling the restabilizaion problem, and we thus adopt robust congestion control to solve it.
Wang et al.24 and Song and Zhao25 investigate cluster synchronization analysis for Lur’e-type dynamic network with delay. Wang et al.24 analyze the continuous-time and discrete-time Lur’e dynamic delayed network using pinning control strategy. Under a uniform scheme, synchronization can be realized in the network model, and the conditions are found to achieve different synchronous forms.25 Robust congestion control has attracted particular interest in the literature for the traditional network control system. Yu and Tomsovic22 provide propagation delay model for traditional load frequency control based on Linear Matrix Inequalities (LMIs). Moon et al.26 propose a robust control model for uncertain state-delayed systems using Lyapunov–Krasovskii functionals. Yue et al.27 design robust controllers for uncertain networked control systems.
However, these studies have three crucial limitations. First, robust congestion control in global network circumstance is seldom discussed to tackle the restabilization problem of cluster synchronization. Second, the approaches aim primarily at source-side rather than the whole CWMSN. Finally, the traditional theories for robust congestion control do not work well in CWMSNs.
In order to address these problems, an improved robust congestion control model for the desired cluster synchronization is proposed using Lyapunov–Krasovskii functionals in Lur’e dynamical network. Global cluster synchronization with the performance of robust congestion control using the RED algorithm at source-side is extended to realize global network restabilization. The cluster synchronization of sending rates at source-side with both lower and upper bounds of delay is formulated by establishing Lyapunov–Krasovskii functionals with reciprocal convex techniques.
The main contributions of this article include the following aspects:
Presenting a realistic global control strategy and delay analysis scheme in CWMSNs. Existing control policies implemented in CWMSNs are lack of global view of the robust congestion control. It shows that global cluster synchronization can be achieved by means of the global view in the realistic CWMSN. Moreover, the propagation delay is considered to make the analysis more realistic. We define the upper bound of delay as the network propagation delay, and analyze its influences in the global CWMSN.
Proposing a general and effective approach to the global cluster synchronization problem, by calculating optimized values for network parameters with a weighted fair scheduling scheme, and maintaining that optimized status via transformation of a cluster synchronization network control system to a normal robust congestion control system.
An interdisciplinary effort is made to develop a robust congestion control strategy by combining the stability analysis theories and congestion control principles of wireless network. Taking advantages of the universal applicability of Lyapunov–Krasovskii functionals in stability analysis of time-delay systems, this article achieves the desired global cluster synchronization in CWMSNs.
Model and analysis
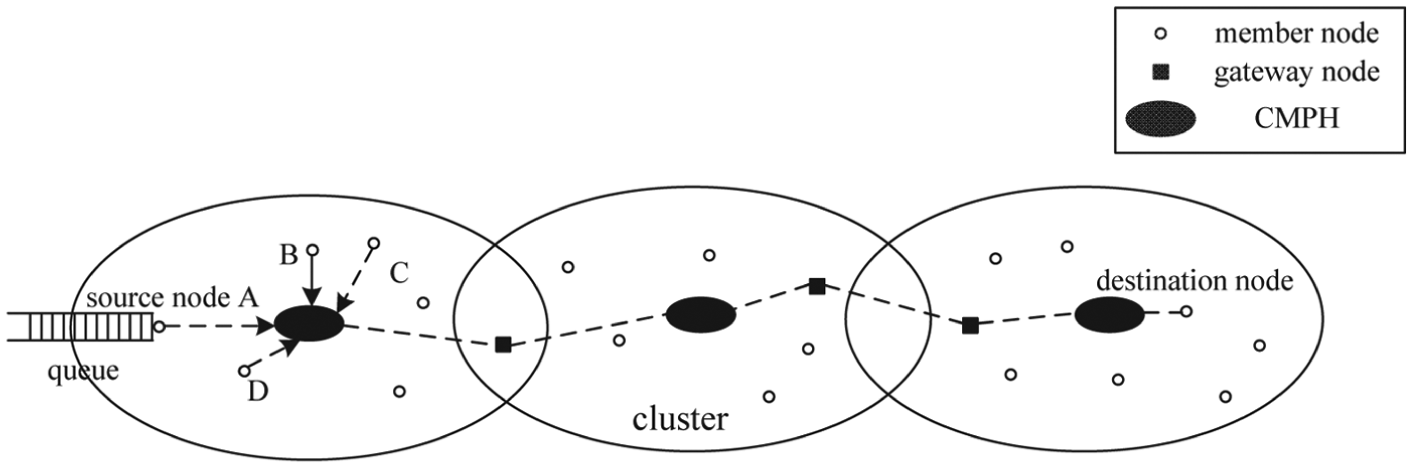
In this section, the control model is proposed by enumerating into six steps. A typical network scenario of data transmission process in CWMSNs accomplished by combining RED algorithm and the AIMD adjustment strategy is shown in Figure 1. When the data are sent from the source node to the destination node in the other cluster via a serial of cluster multimedia processing hubs (CMPHs) and gateway nodes, the source node adjusts its sending rate based on the congestion control messages from the CMPH in the same cluster.
The multi-hop scenario of data transmission process with delay using the RED algorithm and the AIMD strategy under the robust congestion control in CWMSNs.
Scheduling scheme for maximizing the global CWMSN throughput
A non-preemptive weighted fair scheduling scheme pre-arranged for maximizing the global CWMSN throughput is proposed to unify the network parameters of each node in a cluster with the proper sending rates at source-side and ideal global cluster synchronization in the initialization.
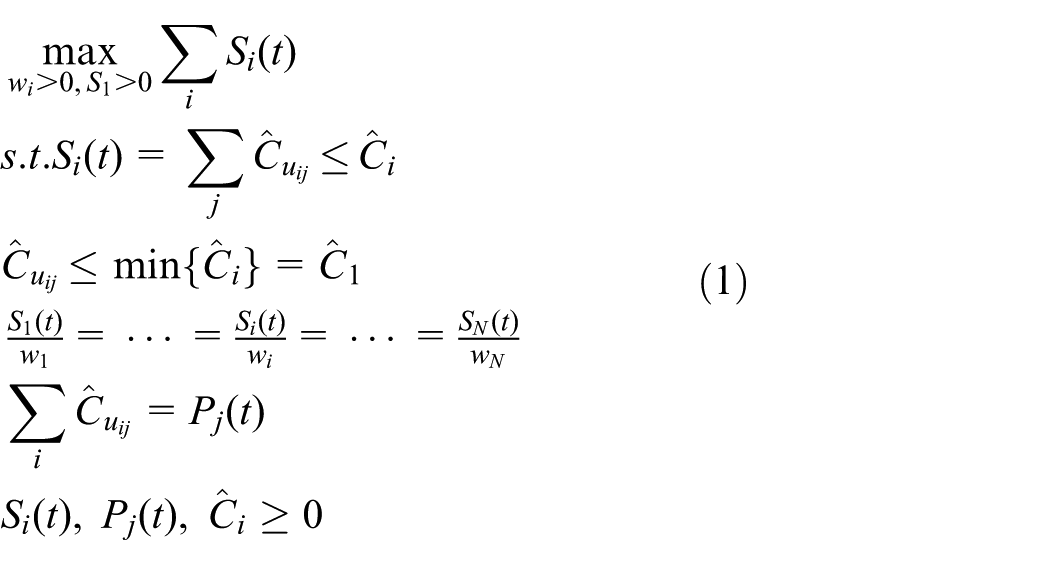
To maximize the global network throughput with limited wireless network resources in CWMSNs, we assume that each cluster has one CMPH, and each CMPH has a maximum process capability . There are N levels of sending rate at source-side, which are proportional to weights . Additionally, the CMPHs can process data flows by scheduling, where all data flows must be transmitted to the CMPH, and the process capabilities on each CMPH is . For convenience, we assume that . Furthermore, each data flow is processed by a series of CMPHs , where means the jth node on the ith end-to-end path. By ignoring the process delays, the optimization problem with the ideal stable state of the sending rate is formulated as
Since the sending rates within an optimized scheduling can be deployed to maximize the global CWMSN throughput, the optimization problem is converted into the problem of maintaining deployed weighted proportion at source-side as . If the global cluster synchronization of the CWMSN is achieved, the network is stable at the maximal network throughput. In this case, the optimized state can be achieved and each sending rate in a cluster can be synchronized.
Sending rate adjustment in consideration of the AIMD strategy for modeling
To effectively adjust the sending rate, the AIMD strategy is adopted. We first assume that any member node is directly connected to the CMPH in the same cluster, and any CMPH in one cluster has only one hop to the gateway node in the same cluster, or two or three hops away from the CMPH in the neighboring cluster. For the gateway nodes, the feedback of congestion state (CS) is sent within the cluster and still between the gateway nodes and the CMPHs in neighbor clusters. The CMPH sends data to the destination node in the destination cluster and controls the sending rate after receiving the CS feedback of the gateway nodes.
The source node periodically collects CS, which contains the current information of neighbor link congestion, from the member nodes via CMPH in the same cluster as shown in Figure 1. The sending rate at source-side makes proper adjustments through the AIMD strategy after receiving feedback messages. Using the AIMD strategy, the source node makes additive-increase adjustment on its sending rate after receiving the non-CS feedback information from the CMPH, while making multiplicative-decrease adjustment on it after receiving the CS feedback of the neighbor nodes or forecasting the congestion via RED on CMPH.
The following assumptions are used for analyzing the AIMD adjustment strategy throughout in this article.
Assumption 1. The source node has an infinite data flow awaiting transmission.
Assumption 2. Two queue lengths are defined in each node: current queue length x and ideal queue length . The variation of the sending rate at source-side corresponds to the difference value . If , the node multiplicative-increase decreases its sending rate, else , the one additive-increase increases. The larger the difference, the more significant the rate variation at source-side. Every node implements the AIMD strategy by means of the difference value including the CMPH, the member nodes, and the gateway nodes.
Assumption 3. The neighbor nodes (including the CMPH, the neighbor member nodes, and the gateway node) explicitly advertise their CSs via feedback message to the source node. There is a local CS added into the feedback message. This feedback message demonstrates the CS of the links in the whole round trip. The CS is either positive (congestion occurred) or non-positive (non-congestion).
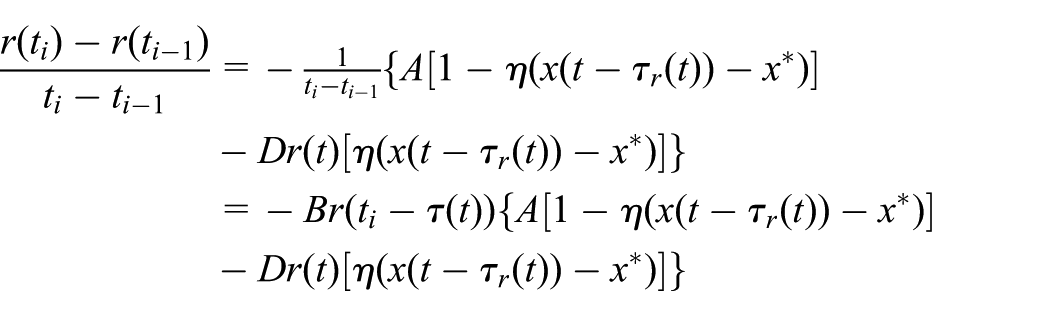
According to the AIMD strategy, A and D are defined as fixed weights for additive-increase and multiplicative-decrease to roughly adjust the sending rate of the source node, respectively.When the CS is non-positive, the source node increases its sending rate proportionally to weight A. On the contrary, when CS is positive, the source decreases its rate proportionally to weight D. When the CS message arrives at the source side at , the time-varying sending rate at the source side is expressed by
where is the forward queue delay, is the reverse propagation delay, and is the propagation delay. Then, for , we have
where B is a fixed weight, , is the sensitivity degree of adjustment, and denotes the probability parameter.
Let , and suppose that in equilibrium state, we can obtain
Substituting in equation (2), the second-order differential equation of is given as
where , and is the instantaneous queue length. Note that the second-order system can be modeled as a state variable equation from (3) as
Collaborative influence using the RED algorithm
Inspired by the model constructed in Hollot et al.,28,29 we propose the simplified RED model by ignoring the timeout mechanism, as shown in Figure 2. The continuous-time variation of window size instead of discrete-time variation based on the queue length at source-side varies by 1 RTT (Round Trip Time) so that the continuous variation is described as . This model is described by
where denotes the first-order derivative of in t, W is the average window size, q is the average queue length, R is the round-trip time , is the link capacity, is the propagation delay, and is the load factor (number of sessions).
Closed-loop CWMSN with sliding windows and the feedback messages by collaboratively using the RED algorithm and the AIMD adjustment strategy.
Considering the probability function of the RED algorithm as an estimation of the average queue length at-source, we have
where are, respectively, the minimum and maximal threshold of dropping random packets in RED.
When , we have
As , we have
From equations (6) and (7), the second-order system in dropping packet threshold of the RED algorithm is expressed as
Influence of channel competition among the neighbor nodes
Exclusive occupation of the wireless channel which is then inaccessible to the other nodes leads to channel competition. It is necessary to unify the sending rate in the same cluster in a period of time. All information in a cluster is aggregated in the unique CMPH, and the control policies are designed to control network congestion.
Figure 3 shows that node A attempts to send data, while it finds that node B is communicating with CMPH at this moment through listening the wireless channel to avoid collision. Then, node A has to wait, and meanwhile, when nodes C and D in the same cluster also need to transmit data, they must also compete with node A.
Multi-hop scenario of the channel competition of the neighbor nodes in CWMSNs.
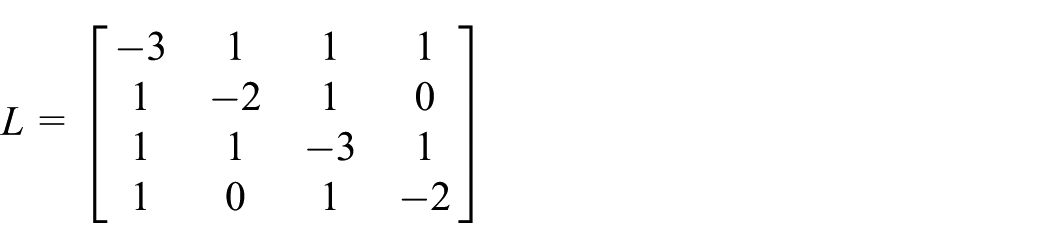
Assumption 4. The whole CWMSN network is diffusively coupled. is the Laplace coupling matrix, which is standing for the coupling configuration of the wireless network. The diagonal elements of the matrix L is defined as
If there is a connection between nodes i and j, then ; otherwise, . The row sum of L is zero. The whole wireless network is connected, and the matrix L is irreducible.
Now, is considered as the Laplace coupling matrix to represent the topology of the CWMSN. Through the Laplace coupling matrix L, the topology relationship of all member nodes around source-side in the same cluster can be described as follows
where appropriate dimensions , and denote the coupling weights of AIMD scheme adjustment and RED algorithm detection from the other neighbor nodes.
Global cluster synchronization based on the weighted fair scheduling scheme
The global cluster synchronization based on the weighted fair scheduling scheme is presented in the proposed system model using the RED algorithm in every cluster. Based on the terms in equations (4), (8), and (9), the congestion control networks per node are considered as an n-dimensional delayed Lur’e dynamical networks given by
where and . The propagation delay satisfies and , where are constants. We define
Robust congestion control model with external interference
Considering the external interference, the closed-loop CWMSN model can be formulated as a robust control model. The closed-loop CWMSN (10) adds the external interference , where is the weight of external interference, which is non-negative constant matrices. Thus, with the propagation delay and the external interference having limited energy and duration, the robust control model of the error state is formulated in the closed-loop CWMSN.
Model formulations of desired cluster synchronization with the performance of robust congestion control
A proper control input is designed with the AIMD adjustment strategy at source-side in the closed-loop CWMSN (10), and we obtain
with which denote the control strength.
The cluster synchronization is said to be the global cluster synchronization if the sending rate of each node with some desired inhomogeneous state is unified as , where denotes that for .
Let be the error state to solve the restabilization problem. According to the term in equations (10) and (11), the robust control model of the error state with propagation delay and external interference in the closed-loop CWMSN is given by
where , and is the control output which monitors the error state of the sending rate . as a measurement is the output of the robust congestion control. can clearly reflect the energy of the external interference.
For closed-loop CWMSN (10), the following assumption is used for the robust congestion control to achieve cluster synchronization with the performance of robust congestion control.
Assumption 5. for and any , .the activation function satisfies the following conditions
where are given constants. It is easy to find , we set , , and
Criteria for global cluster synchronization with the performance of robust congestion control
This section first presents some mathematical lemmas. A new criterion of global cluster synchronization with the performance robust congestion control is then discussed. Finally, sufficient conditions are obtained through Theorem 1.
We first establish our main criteria based on the linear matrix inequalities(LMIs) approach. For presentation convenience, in the following equation, we denote and
Lemma 1. (Kronecker product) Let ⊗ denote the notation of Kronecker product. Then, the following properties are satisfied in appropriate dimensions.
Lemma 2. For any symmetric matrix , scalar , and vector function such that the following integration is well defined30
Lemma 3. Let the functions . have the positive values in an open subset of and satisfies with and , then the reciprocal convex technique of over the set satisfies31
Theorem 1. Under Assumptions 1 to 5, the CWMSN in the presence of propagation delay and external interference can achieve the desired global cluster synchronization with the performance index , if there exist constant matrices diagonal matrices and given the external interference attenuation level , that the following conditions in (13) and (14) hold
where
Proof. Consider the following Lyapunov–Krasovskii functionals acting on the closed-loop CWMSN (12) as
with diagonal matrices to be determined. For any appropriate dimension matrix , we have
It follows from Assumption 5 for positive diagonal matrices, and we can get
where
Now, applying Assumption 4 and Lemmas 1 and 2, we estimate the time derivative of along the closed-loop CWMSN as follows
Based on . in equation (14) and convex combination technique that and if and only if .
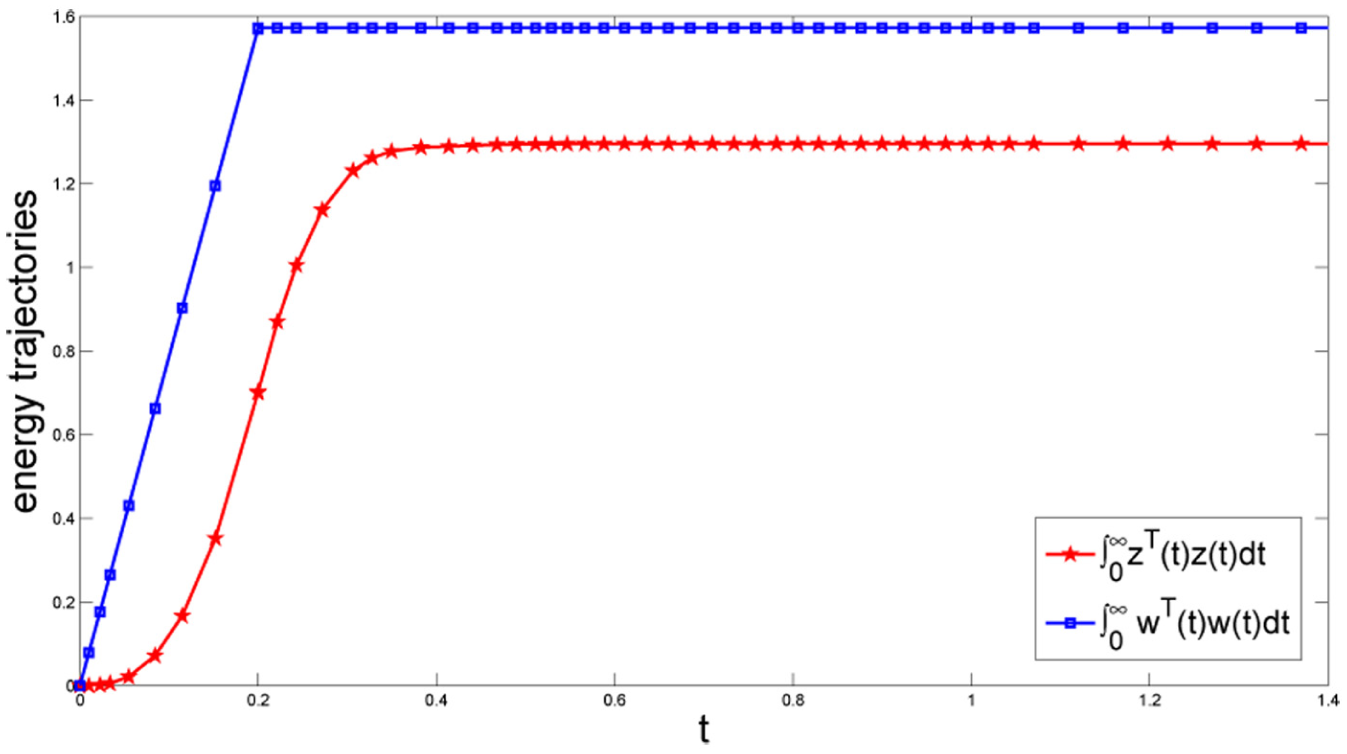
Consider the following performance index
where J denotes the relation of the energy of the controlled output and the external interference , and denotes performance index that is a prescribed positive scalar.
represents the energy relation of the controlled output and the external interference. , means that the energy of external interference has robust controlled and the energy trajectories of the control output is lower than that of the external interference.
Consider , we have
with
Following the inequalities in equations (13) and (14), and from Schur Complement Lemma, we have
Sum t from 0 to that
With the zero initial condition , we have
Based on Lyapunov–Krasovskii theory, the continuous linear propagation delay closed-loop CWMSN with the external interference can achieve robust control with desire performance index following equations (13) and (14).
The proof is completed.
Simulation results
In this section, a numerical simulation is conducted to indicate the effectiveness of the proposed scheme in CWMSNs and the synchronization criteria given in Theorem 1.
The error state equation of the CWMSN (12) with the parameters is considered as and
where , , the inner coupling matrices are defined as , and the Laplace coupling matrix is
We consider a cluster synchronization pattern of the zero initial conditions that . It means that the error states of the sending rate is zero and the CWMSN is stable on stability control in the beginning.
A four-dimension matrix is considered to denote four clusters in the closed-loop CWMSN. To make the simulation tractable, that is, the external interference is assumed to be denoted as
which is a function with limited energy and duration.
According to Theorem 1, there exists a feasible solution on LMIs from equations (13) to (14). The variation of the error states in CWMSN reflects the trajectory of the current state approaching the ideal state. This simulation shows the network parameter (the sending rate at source-side) is cluster synchronization with the performance of robust congestion control in the closed-loop CWMSN scenarios.
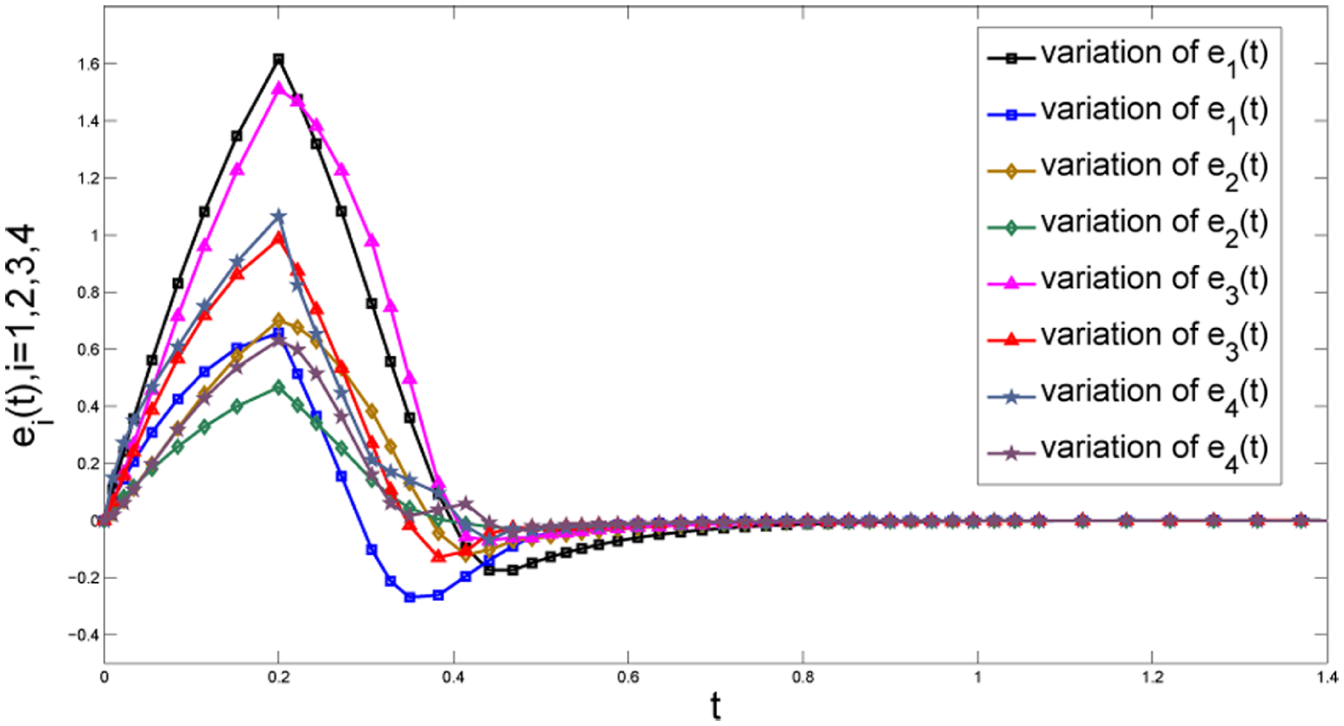
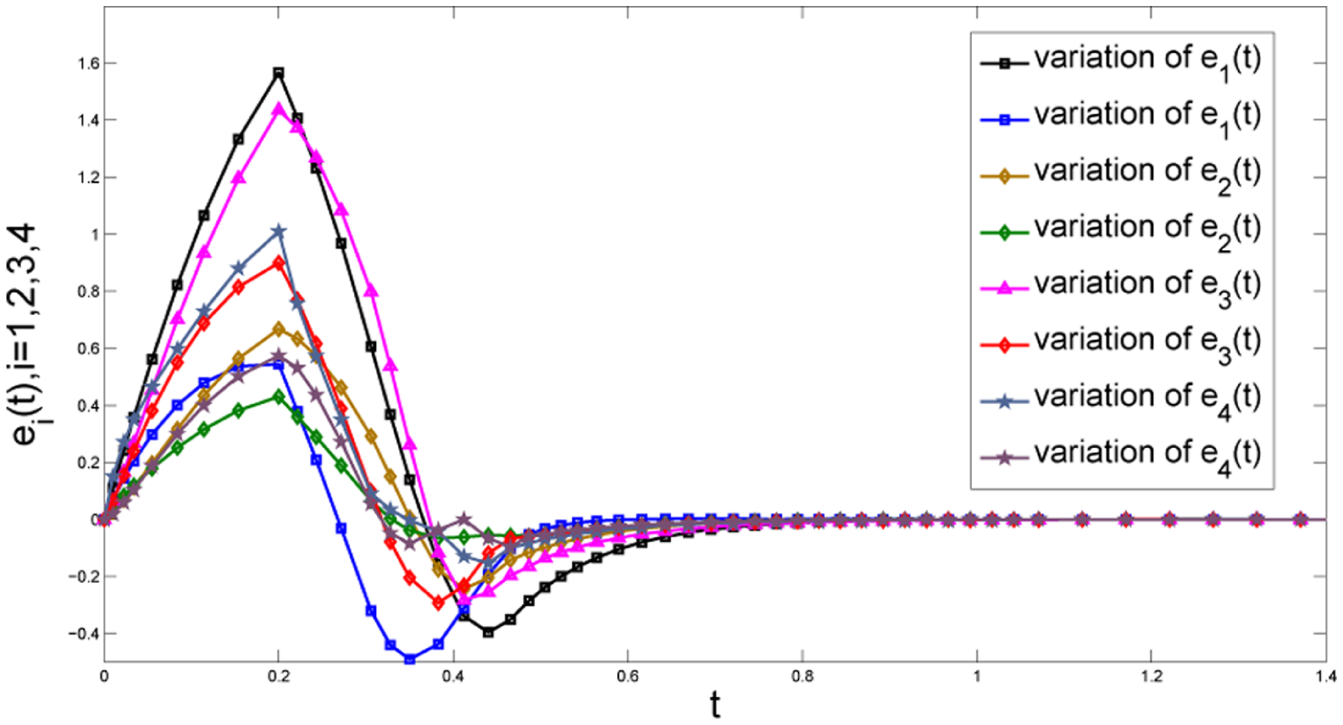
Here, the error states is first represented in Figure 4. Each error state of the source node is a second-order system with two trajectories to represent its variation. The source node uses robust congestion control to adjust its sending rate in the presence of propagation delay and external interference. Notably, the error states of the sending rate become unstable again when the external interference occurs at the initial moment. Then, the error states for cluster synchronization with the performance of robust congestion control converges after a finite length of time.
Variations of error state with two trajectories to represent its variation in the presence of propagation delay and external interference.
Figure 5 shows the energy relation of the controlled output and the external interference . Notably, the energy of the robust congestion control output is lower than that of the external interference . It represents that the energy of the external interference is restrained under the robust congestion control in CWMSNs, which validates the effectiveness of the proposed scheme.
Energy trajectories of the control output and the external interference .
We suppose the probability function of the dropping packets , respectively. Notably, the variations of the error states may converge after a longer finite length of time when in Figure 6. The energy of the control output is lower than that of the external interference under RED adjustment with the probability function in Figure 7.
Variations of error state with two trajectories to represent its variation in the presence of propagation delay and external interference.
Energy trajectories of the control output and the external interference .
Figure 8 shows that the variations of the error states may converge after a shorter finite length of time when . But the energy relation in Figure 9 reflects that the external interference is not restained. The energy of the external interference is higher than that of the controlled output . Therefore, the RED with the probability function in CWMSN cannot implement robust congestion control under these known parameters in the presence of the propagation delay and external interference. It means that more restrained drop probability may cause the global CWMSN to move out of robust congestion control.
Variations of error state with two trajectories to represent its variation in the presence of propagation delay and external interference.
Energy trajectories of the control output and the external interference .
Conclusion
In this article, we have adopted the AIMD strategy and proposed a robust congestion control model using neighbor feedback and scheduling scheme In CWMSNs. The robust congestion control model has been presented and modeled by Lur’e-type system. In the context of Lur’e dynamical network, the concept of cluster synchronization has been adopted. The network has been able to achieve cluster synchronization with the performance of robust congestion control by applying Lyapunov–Krasovskii functionals. The sufficient conditions have been formulated by LMIs. Finally, a numerical simulation has been conducted to indicate the effectiveness of the proposed scheme. The approach that we have presented can possibly be extended to model and analyze more complex robust control approaches in multi-hop WMSNs. For future studies, more complex control algorithms modeled in multi-hop WMSNs would be discussed.
Footnotes
Academic Editor: Hao Yue
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the 863 project (grant no. 2014AA01A701) and the National Natural Science Foundation of China (grant nos 61271168 and 61471104).
AkyildizIFMelodiaTChowdhuryKR.Wireless multimedia sensor networks: applications and testbeds. P IEEE2008; 96(10): 1588–1605.
4.
WangCLiBSohrabyK. Upstream congestion control in wireless sensor networks through cross-layer optimization. IEEE J Sel Area Comm2007; 25(4): 786–795.
5.
TeoJYHaYThamCK.Interference-minimized multipath routing with congestion control in wireless sensor network for high-rate streaming. IEEE T Mobile Comput2008; 7(9): 1124–1137.
6.
BandyopadhyaySCoyleEJ.An energy efficient hierarchical clustering algorithm for wireless sensor networks. IEEE INFOCOM Ser2003; 3: 1713–1723.
7.
PrasadDRNaganjaneyuluPVPrasadSK.A hybrid swarm optimization for energy efficient clustering in multi-hop wireless sensor network. Wireless Pers Commun2016; 1–13. DOI: 10.1007/s11277-016-3562-8.
8.
RazaqueAMudigulamSGaviniK. H-leach: hybrid-low energy adaptive clustering hierarchy for wireless sensor networks. In: Proceedings of the 2016 IEEE long island systems, applications and technology conference (LISAT), Farmingdale, NY, 29 April 2016, pp.1–4. New York: IEEE.
9.
PeriyasamyRPerumalD.A game theory-based hybrid medium access control protocol for congestion control in wireless sensor networks. In: HauskenKZhuangJ (eds) Game theoretic analysis of congestion, safety and security. Berlin: Springer, 2015, pp.1–25.
10.
KafiMADjenouriDBen-OthmanJ. Congestion control protocols in wireless sensor networks: a survey. IEEE Commun Surv Tutor2014; 16(3): 1369–1390.
11.
MahdiOAAbdul WahabAWIdna IdrisMY. A comparison study on node clustering techniques used in target tracking wsns for efficient data aggregation. Wirel Commun Mob Com2016; 16: 2663–2676.
12.
ChenGLiCYeM. An unequal cluster-based routing protocol in wireless sensor networks. Wirel Netw15(2): 193–207.
13.
De CiccoLGongYRossiD. A control-theoretic analysis of low-priority congestion control reprioritization under aqm. ACM Trans Model Perform Eval Comput Syst2016; 1(4): 17:1–17:33.
14.
MohapatraSKBisoySKDashPK. Stability analysis of active queue management techniques. In: Proceedings of the international conference on man and machine interfacing (MAMI) 2015, Bhubaneswar, India, 17–19 December 2015, pp.1–6. New York: IEEE.
15.
AlabdallaouiSBerraissoulAIdboufkerN. Performance evaluation of red approach for traffic lights management. In: Proceedings of the 15th international conference on intelligent systems design and applications (ISDA) 2015, Marrakesh, Morocco, 14–16 December 2015, pp.358–362. New York: IEEE.
16.
PatelS. Performance analysis and modeling of congestion control algorithms based on active queue management. In: Proceedings of the international conference on signal processing and communication (ICSC) 2013, Noida, India, 12–14 December 2013, pp.449–454. New York: IEEE.
17.
ShangQWangJChenX.A TCP traffic smoothing algorithm based on rate pacing. Cham: Springer, 2016, pp.572–582.
18.
MoliaHK.A proactive dynamic rate control scheme for AIMD-based reactive TCP variants. Singapore: Springer, 2016, pp.169–176.
19.
BansalGKenneyJB. Achieving weighted-fairnessin message rate-based congestion control for dsrc systems. In: Proceedings of the IEEE 5th international symposium on wireless vehicular communications (WiVeC) 2013, Dresden, 2–3 June 2013, pp.1–5. New York: IEEE.
20.
ZhuYShamesIManzieC.Stability analysis for distributed perimeter controlled traffic networks. In: Proceedings of the American control conference (ACC), Boston, MA, 6–8 July 2016, pp.809–814. New York: IEEE.
21.
WanQZhangWXuY. Distributed control for energy management in a microgrid. In: Proceedings of the IEEE/PES transmission and distribution conference and exposition (T& D), Dallas, TX, 2–5 May 2016, pp.1–5. New York: IEEE.
22.
YuXTomsovicK. Application of linear matrix inequalities for load frequency control with communication delays. IEEE T Power Syst19(3): 1508–1515.
23.
YangLGuanXPLongCN. Feedback stabilization over wireless network using adaptive coded modulation. Int J Autom Comput2008; 5(4): 81–388.
24.
WangTLiTYangX. Cluster synchronization for delayed lur’e dynamical networks based on pinning control. Neurocomputing2012; 83: 72–82.
25.
SongQZhaoZ.Cluster, local and complete synchronization in coupled neural networks with mixed delays and nonlinear coupling. Neural Comput Appl2014; 24(5): 1101–1113.
26.
MoonYSParkPKwonWH. Delay-dependent robust stabilization of uncertain state-delayed systems. Int J Control2001; 74(14): 1447–1455.
27.
YueDHanQLLamJ.Network-based robust H∞ control of systems with uncertainty. Automatica2005; 41(6): 999–1007.
28.
HollotCVMisraVTowsleyD. Analysis and design of controllers for AQM routers supporting TCP flows. IEEE T Automat Contr2002; 47(6): 945–959.
29.
HollotCVMisraVTowsleyD. A control theoretic analysis of RED. IEEE INFOCOM Ser2001; 3: 1510–1519.
30.
LiTFeiSMZhangKJ.Synchronization control of recurrent neural networks with distributed delays. Physica A2008; 387(4): 982–996.
31.
ParkPKoJWJeongC.Reciprocally convex approach to stability of systems with time-varying delays. Automatica2011; 47(1): 235–238.