
Abstract
A novel six-direction sensor for absolute vibration motion is proposed in this study for the measurement of absolute motions by employing multi-direction quasi-zero-stiffness property. Scissor-like structures with pre-deformed springs are applied symmetrically in the proposed sensor. Based on the mathematical modeling of the proposed six-direction sensor, it is shown that the stiffness and damping properties of the sensor are adjustable nonlinear functions which are dependent on the structural parameters of scissor-like structures. And then, by utilizing bifurcation theory and perturbation method, the structural parameters are optimized for the improvement of measurement accuracy. For the realization of the approximate fixed point for a moving vibration object, the vibration from measurement object to the sensor is isolated, and thus the sensor could obtain the absolute motions. Utilizing the signals obtained by the proposed sensor directly, better vibration/suppression effectiveness is achieved. The results provide a novel and significant six-direction absolute motion measurement method by utilizing multi-direction quasi-zero-stiffness property with noticeable isolation performance only with passive elements.
Introduction
In the feedback control,1–4 parameter identification fields, 5 and so on for dynamic systems, the output signal is the most important feature which reflects the response characteristics in work processing. Recent development in the study of control strategies requires veracious output-feedback signal, which depends on the performance of signal pickup assembly and an appropriate measuring method to achieve beneficial performances such as isolation for moving vehicle6,7,8 and vibration suppression for precise instrument on micro air vehicle (MAV). The usual signal measurement method contains sensor (i.e. relative displacement sensor and acceleration sensor), 9 radar (radio detection and ranging), 10 and laser measurement technology. 11 The problem is that how to reduce the error and time delay between the signal feedback on the system by active control and the signal assembled.
Since it is found that utilizing absolute displacement or velocity response as the variable of feedback-control strategy can effectively improve performance1–4,12,13 of vibration isolation system, the output-feedback control is generally designed as a function of displacement and velocity response. But the distortion induced by integral operation and filtration of the feedback-control signals to the real output response cannot reach anticipant control effect using the acceleration sensor which obtains the absolute acceleration of the vibration of a moving object. However, the time delay cannot be ignored in feedback control, which can induce bifurcation and instability of a dynamic system. 14 To obtain the absolute displacement motion or velocity motion of a moving vibration object, an absolute motion sensor based on quasi-zero-stiffness (QZS) isolation property is proposed.15,16 The measuring signal obtained by the sensor system can be used directly for feedback control and parameter identification.
But the previous research is focused on one-direction measurement, since it could realize isolation in only vertical direction. As the generalization of the previous research, the idea of vibration sensor in this article comes from multi-direction (MD) QZS vibration isolator which can isolate the vibration from the under structure. Because of the remarkable isolation effect of MD QZS property, the MD relative motions between the QZS system and the under structure are close to the absolute motions of the under structure. The most common method of isolating vibrations is to use an isolator whose stiffness is close to zero.17–21 In previous studies,17–21 the QZS-VI system is demonstrated to be an ultra-low frequency vibration isolator by adjusting the stiffness characteristics and geometric size of the two horizontal springs. Therefore, in order to decrease the error of the relative motion and absolute motion, it is important to improve the sensor system to obtain much better MD isolation performance. This article utilizes the isolation characteristic of the QZS structure and scissor-like structures (SLSs)22,23 to approximately obtain the absolute motions of a vibration system in six directions.
The article is organized as follows. First, an MD QZS sensor for absolute motion measurement is proposed in section “Structure and modeling of the proposed sensor.” Second, the measurement accuracy, design, and optimization of the sensor are analyzed by Harmonic balance methods (HBMs) in section “Measurement mechanisms and accuracy,” and thus the optimal structural parameters are obtained. Then, the signal obtained by the QZS vibration sensor is used for vibration control/suppression with adjustable time delay as shown in section “Application in time-delayed control.” Finally, a conclusion is thereafter given in section “Conclusion.”
Structure and modeling of the proposed sensor
Structural diagram of the proposed sensor
A MD sensor for MD absolute motions is proposed, whose structural diagram is shown in Figure 1.

(a) The structural diagram of the proposed six-direction (6D) sensor for absolute displacement measurement and (b) assembling the proposed sensor on measurement object M1.
Figure 1 shows the proposed sensor for measurement of absolute motions of a moving and vibrating system M1 (i.e. a moving vehicle body). The structural diagram of the sensor is shown in Figure 1(a) which utilizes several symmetric SLSs with pre-deformed springs. Assembling the proposed sensor on the measurement object M1, the absolute motions of M1 could be measured by three distance sensors fixed on the M2. The structural parameters of the proposed sensor are listed in Notation. For the structure characteristic of the proposed sensor, there are several adjustable structural parameters (i.e. the pre-deformation of springs in vertical SLS λs1, in horizontal SLS λs2, and the assembly angle θ1 and θ2 of the rods in SLSs) which could improve the precision of measurement signals. For pre-extension springs in SLSs, the values of λs1 and λs2 are positive since the springs are stretched in the assembly processing while the values are negative for pre-compression case. Also, the assembly angles θ1 and θ2 could adjust the strength of nonlinearity in the two directions. The effect of adjustable structural parameters on vibration properties would be studied in detail.
Modeling of the proposed sensor
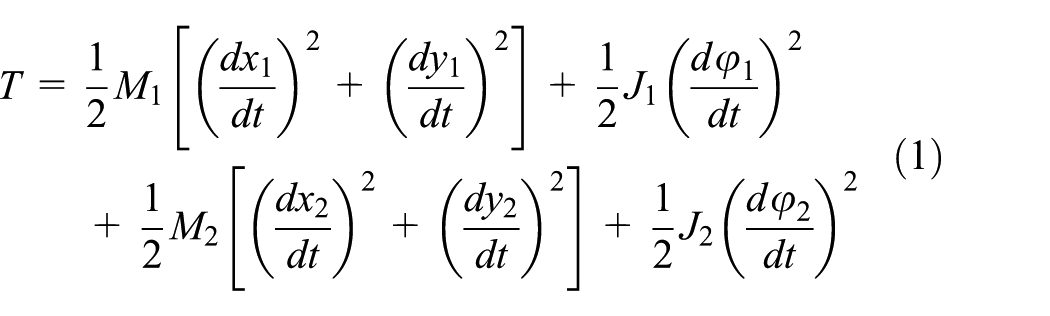
The kinetic energy T of the system equals to the sum of kinetic energy of M1 and M2, which can be written as
In order to obtain the potential energy V of the elastic components in the system, the deformation of the SLSs in the sensor should be analyzed. Figure 2 shows the vibration motions of mass M2 and the midlines of the four SLSs assembled in the proposed sensor.

(a) Deformations and rotational angles of midlines of the SLSs in the sensor and (b) deformations of springs between M1 and the base.
Figure 2(a) shows the deformations and rotational angles of midlines of the four SLSs used in the sensor for vibration and the relative motions between

and

Therefore, the deformations of springs in the four SLSs could be obtained according to the lengths of midlines of the SLSs from equation (2). As an example, the lengths of spring and midline in the right-side SLS after deformation are shown in Figure 3.
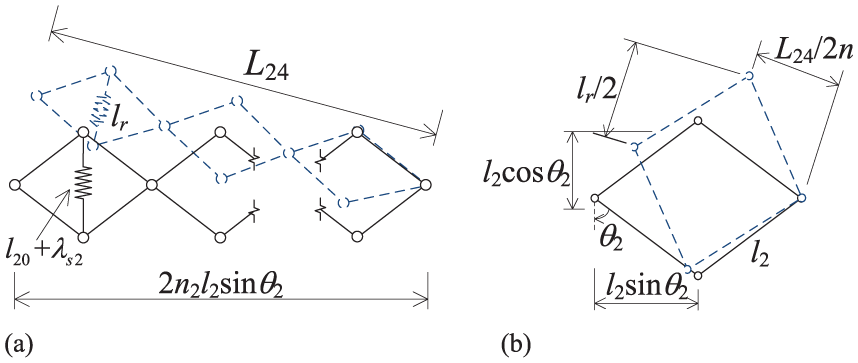
(a) The deformation of the right-side SLS and (b) the deformation of one layer.
From Figure 3, the length of spring in the right-side SLS

Because the value of pre-deformation of springs used in the vertical SLSs is λs1 and in horizontal SLS is λs2, there are conditions that

where the generalized coordinates

With the conditions of relative motions and absolute motions of the sensor as

where


Therefore, from equation (7), different-direction motions are coupled in nonlinear terms. It can be seen that the isolation effectiveness in different directions is dependent on the stiffness matrix, damping matrix, and nonlinearity, thus the measurement accuracy of the measurement signals is determined by the isolation effectiveness in different directions.
Measurement mechanisms and accuracy
Vibration mechanisms and vibration responses
For an arbitrary excitation from the base, the vibration energy of the vibration system with the proposed sensor is shown in Figure 4.

The vibration energy transfer processing for the MD vibration system with proposed sensor.
The input and output functions shown in Figure 4 represent the vibration signals for different objects. The input of the vibration energy is from the base excitation; the vibration response of

where
According to the definition of the displacement transmissibility function
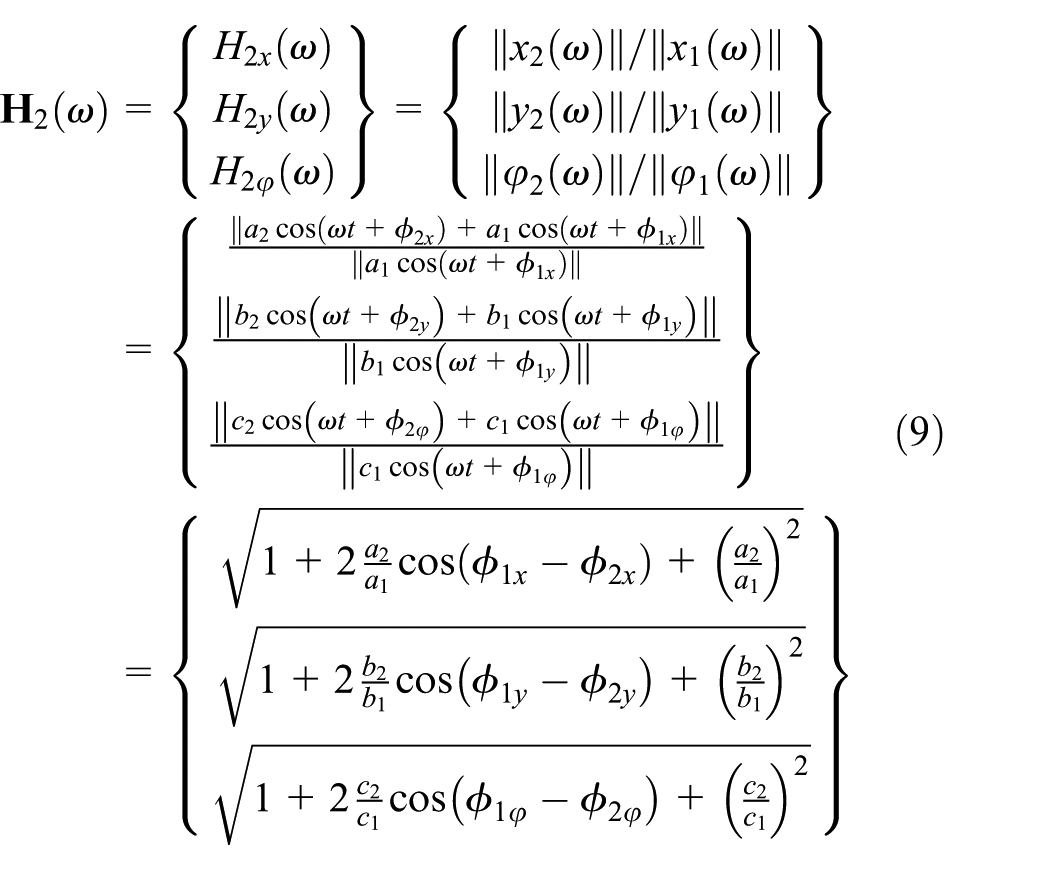
If the value of each item in the displacement transmissibility function
Measurement accuracy and the design of structural parameters
Since the displacement transmissibility function

If it needs
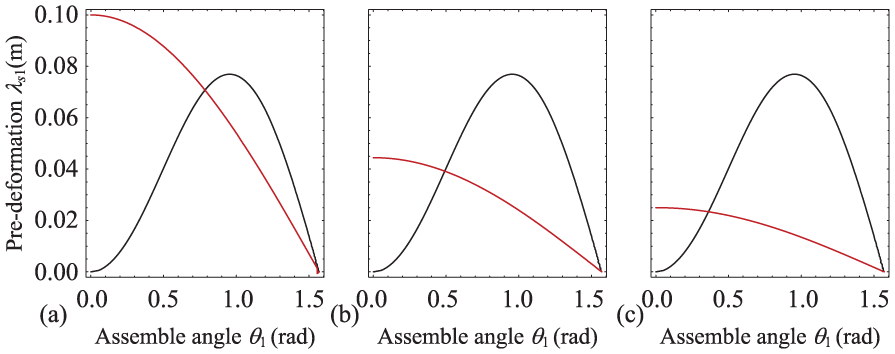
Pre-deformation versus assemble angle diagrams for (a)
In Figure 5, the red lines stand for
The values of the adjustable structural parameters λs1 and θ1 in the sensor system for different layers

The transmissibility function

The vibration transmissibility function
From Figure 6, it can be seen that the optimal values of structural parameters for isolating the vibration transferred from
As the adjustable structural parameters in SLSs are designed for the condition

The comparison between the absolute motions
The amplitude of motion should be a small vibration for the measurement accuracy, and thus the amplitude of excitation used in Figure 7 is in the range of [0, 0.05] (m). For the measurement of MD vibration of
Application in time-delayed control
Feedback signals
Since the vibrations of

The signals measured by the distance sensors fixed on
As shown in Figure 8, the signals measured by the distance sensors are

The second equation in equation (11) minus the first equation in equation (11), we could obtain

Then, from the third equation, the relative motion

and then substituting
The relative motions
Time-delayed control effectiveness
Because the sensor could obtain the approximate absolute motions

MD vibration system with time-delayed control.
Based on the signals measured with the three sensors for relative motions

where

Vibration transmissibility from base to the controlled object
The transmissibility function
Conclusion
A sensor for MD absolute motion measurement based on its significant vibration isolation effectiveness is proposed for vibration system in its processing of moving (i.e. a moving vehicle and isolation platform in spacecraft) in this article. The MD QZS property is utilized for the realization of quasi-fixed point, and thus the sensor can measure the MD absolute motions approximately by the relative motion between the quasi-fixed point in space and the measurement object. Adjusting the structural parameters of the proposed sensor system, the relative motion measured is closed to the absolute motion of the measurement object in that the MD QZS system has remarkable isolation characteristic, which means that the isolation object of the MD QZS system can almost remain in steady state with small magnitude vibration. The better the isolation of the QZS system, the smaller the relative error between the signal measured and the absolute motion. For different styles of vibration, the proposed MD QZS vibration sensor is effective and convenient to measure the absolute motion of a MD vibration system. The analysis provides a useful insight into the design, optimization, and application for time-delayed control of the MD QZS vibration sensor.
Footnotes
Appendix 1
Academic Editor: Mohammad Razzaque
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Shanghai Sailing Program (16YF1408000), the Natural Science Foundation of Shanghai (16ZR1423600), and National Natural Science Foundation of China (11602141).