
Abstract
The dedicated short-range communication/wireless access for vehicular environment together with the fourth generation-long-term evolution technologies has been widely accepted as the most promising approaches to enhance the transportation safety. As pedestrians are still protected based on the traditional honking approach, the communication-based safety alert is questionable in the practical usage. In this article, a dedicated short-range communication/long-term evolution/WiFi-based vehicular system is developed to support the vehicle-to-vehicle and vehicle-to-pedestrian communication for the safety of vehicles and pedestrians. The implementation of the heterogeneous vehicle-to-vehicle/vehicle-to-pedestrian communication module is based on an IEEE 802.11a compliant communication module, integrated with the long-term evolution module and WiFi wireless interface. A collision estimation and safety alert module on smartphone is further designed and implemented to protect pedestrians. Various performance evaluation experiments are carried out under different scenarios via an uncontrolled approach, including the university campus, typical urban streets, and suburban districts. The packet delivery rate and end-to-end latency in each scenario are recorded and analyzed based on non-line-of-sight/line of sight cases. Experiment results reveal that IEEE 802.11p based vehicle-to-vehicle communication is unstable in the non-line-of-sight conditions, while the cellular-based performs better in the transmission reliability but has larger latency than IEEE 802.11p. The WiFi based vehicle-to-pedestrian communication is efficient when the transmission distance is less than 150 m.
Introduction
As vehicles gain extensive popularity, traffic accident involving cars and vulnerable pedestrians has been one of the most serious problems in the transportation system nowadays. To enhance the transport safety and reduce accidents, researchers and industries are focusing on vehicular networking to sense everything. The IEEE has defined the IEEE 802.11p/1609.x families, known as the dedicated short-range communication/wireless access for vehicular environment (DSRC/WAVE) standard to facilitate vehicular communication. Using DSRC, vehicles equipped with the on-board units (OBUs) can communicate with each other and the road side units (RSUs), known as the vehicle-to-vehicle (V2V) and vehicle-to-RSU (V2R) communication. V2V communication is critically important as many safety applications rely on the safety messages broadcast among surrounding vehicles. 1 The long-term evolution (LTE) communication technique is taken as an alternative option to support the vehicle-to-everything communication, due to its high-speed transmission and the device-to-device (D2D) communication mode supported by the ProSe service. 2
Since the DSRC/WAVE standard and LTE technique have been published for decades, novel algorithms, performance evaluation, protocol improvement, and so forth have been carried out by researchers using theoretical approaches and modeling3–5 and simulations.6–8 It has been proven that either DSRC- or LTE-based technique cannot support reliable and real-time V2V communication for safety messages. Besides the indoor related works, real world experiments and field operational tests are also needed and carried out globally nowadays. Such as the application-oriented testing in the United States, the University of Michigan Ann Arbor has deployed about 3000 vehicles with DSRC devices to measure their safety benefits to drivers in reality, known as the Safety Pilot Model Deployment research program. 9 In Europe, the DRIVE C2X project 10 was completed and evaluated eight applications concerning traffic safety and efficiency of vehicles in July 2014. In China, the research project on the cooperative vehicular and infrastructure system (CVIS) 11 has been completed to show its feasibility of active safety applications, such as collision avoidance, collaborative lane changing, fleet control, and blind spot warning. The situation is that these projects are benefits for the vehicular networking deployment. The corresponding reports and works mainly describe the motivations, objectives, technologies and final conclusions of the field tests, while detailed experimental procedures and tests results are rarely accessible to public. The DSRC radios of these field tests are either commercial product that is costly, such as the MK2 WAVE/DSRC radio from Cohda wireless, or just the approximation of the IEEE 802.11p and bounded to the physical or medium access control (MAC) layer operation of the underlying protocol without open application programming interface (API). Meanwhile, the reproducibility of the vehicular communication performance measurement with different platforms is limited and lack of consistency. It has been a consensus that fully compliant open DSRC/WAVE communication system would be of great benefit.
Despite the development of V2V and V2R communication, the vulnerable pedestrians and bicyclists are still protected from vehicles via the traditional honk warning method. Intelligent pedestrian warning system is directed to alert the car drivers using the pedestrian detection sensors and infrared radars; the delay requirement usually cannot be satisfied. Meanwhile, pedestrians’ attention is diverted by the ubiquitous smart devices. 12 Therefore, the real-time and reliable communication between OBU and smart devices of pedestrians (denoted as V2P communication) is critical to exchange alert and avoid collision.
In this article, a DSRC-/LTE-/WiFi-based V2X communication system is developed for the safety of vehicles and pedestrians. The heterogeneous communication system is composed of the OBU with the DSRC, LTE and WiFi interfaces, the WiFi based tablet to put into the vehicle for drivers to display driving assistance information, the smart-phone with the WiFi module handled by pedestrian and the app server to collect driving data. The OBU fetches the vehicle driving data from the on-board diagnostics (OBD) via the Bluetooth interface and uses the DSRC and LTE module to realize V2V communication, WiFi module for V2P and vehicle-to-driver (V2D) communication. The smart-phone’s WiFi module is modified to use the beacon stuffing approach based on Dhondge et al. [12] to support the V2D communication. Meanwhile an collision estimation module is developed on the smart-phone to provide adaptive alert to the pedestrian. In this paper, we firstly describe the implementation procedure of the communication system. Secondly, we use the system to conduct data analysis–based performance measurement in terms of packet delivery rate (PDR) and end-to-end latency of IEEE 802.11p and LTE-based V2V beaconing transmission using outdoor experiments under different scenarios including our campus, typical urban street and suburban expressway via an uncontrolled approach. Finally, the WiFi-based V2P communication performance is also validated under static and dynamic scenarios.
The rest of this article is organized as follows. Section “Related work” explores the related and similar work involving the DSRC/WAVE system implementation and performance evaluation, and the V2P communication–based pedestrian safety protection. Section “Heterogeneous V2X communication system” explains the system architecture and implementation of the system including the DSRC/WAVE development, DSRC/Wi-Fi modules coexistence on OBU as well as the collision estimation and adaptive alert algorithm based on V2P communication in detail. The experiment scenarios and experimental procedure are described in section “Experiments scenarios and procedure,” followed by the results demonstrated in section “Data analysis and experiment results” and finally, section “Conclusion” concludes this article.
Related work
The literatures in the field of DSRC/WAVE implementation and performance measurements are summarized as follows. Fernandez et al. 13 uses the field programmable gate array (FPGA) to implement the IEEE 802.11p physical layer operation and investigated the dependence of V2V communication performance considering packet length, payload size, and data rate. Ho et al. 14 has come up with an IEEE 802.11p solution via modifying an IEEE 802.11a chipset. The communication between an OBU and RSU as tested using a real urban road scenario and the results show that the transmission delay and reception ratio are acceptable with transmission range up to 300 m. Similar work has come up in Ameixieira et al., 15 with the completion of seamless synchronous channel switching. They system has made contribution to real-world DSRC/WAVE platform. However, it does not provide performance validation result other than a delay variation graph. Later in Agostini et al., 16 a DSRC prototype is implemented on an Open-Air-Interface Software-Defined Radio (SDR) platform while not much effort put on deploying an integrated platform. Zhao et al. 17 develop an approximate DSRC communication platform using off-the-shelf IEEE 802.11a hardware with specific parameters amending to measure the delay and packet loss rate under diffidence distance, antenna settings, and speeds of several discrete values, which cannot present the real-world conditions. Wang et al. 18 accomplish a deeper research for the vehicular communication by considering the vehicle frequent vertical handoffs using the self-selection decision tree for the vertical handoff among WAVE, WiMAX, and 3G cellular techniques. However, they use simulations to verify their work instead of testbed implementation. The beaconing performance is evaluated in terms of PDR and PIR in Elena Renda et al. 19 using three vehicles equipped with the IEEE 802.11p based LinkBird-MX v3 units. The distribution of packet inter-reception (PIR) time is derived to fit a power-law distribution and the transmission blackout probability is evaluated under the highway scenario using only three vehicles, while the performance in the urban scenario with dense traffic was not measured. The work 20 applies the uncontrolled urban expressway scenario to evaluate the IEEE 802.11p based V2V communication performance using the Denso WSU products. The study presents a useful reference of the urban expressway performance measurement. However, there are only two vehicles deployed in each experiment scenario, which lacks generality and reality as there are usually much more vehicles in the vicinity in the real world environment. In our previous work, 21 we have demonstrated the implementation of the DSRC/WAVE communication prototype and then in Meng et al., 22 we carry out the field tests to measure and compare the DSRC- and LTE-based V2V communication without considering V2P communication. The results demonstrate that the separation distance, traffic density, and transmission rate have negative impact on the PDR, while traffic density and packet size have negative impact on the latency.
In a word, previously real-world experimental studies usually applied only two or three vehicles to evaluate a pair V2V transmission. Meanwhile, in the previous literatures, the experiment conditions are under-controlled, such as the vehicle distances, driving speeds, and traffic density. While tests with free testing flows that have continuously changing traffic flow are more general and accurate to reflect the real-world conditions. Thus, we implement the IEEE 802.11p based V2V communication and validate its performance in terms of PDR and average delay by employing up to 20 vehicles installed with the system under different scenarios including our campus, typical urban street, and suburban district. The three scenarios have different characteristics such as the campus has dense obstructions and tight roads with low limited driving speed, while the urban street has continuously changing traffic flow and the suburban district is characterized by high-speed and uphill–downhill ramps. In the experiments, the uncontrolled conditions are taken into consideration with minimal preemptive parameter settings.
There have been some literatures proposed considering the V2P communication to issue alerts between vehicles and vulnerable road users when potential collisions are possible to arise. In Borges et al., 23 the stereo vision is used to detect pedestrians in the proposed active pedestrian safety system that combined the sensing, situation analysis, decision making, and vehicle control. The General Motors researchers 24 applies the peer-to-peer standard WiFi Direct to collaborate with other sensor-based object detection and driver alert systems on production vehicles to detect pedestrians and bicyclists carrying smart-phones equipped with WiFi Direct. They mention that the association time of WiFi Direct users takes only around 1 s, which is actually limited in the practical traffic environment that the driving speed should not be larger than 20 km/h, 25 of which also argues that the WLAN chipsets cannot achieve high transmission speed at the ad-hoc mode. They propose to apply the DSRC for the V2X communication. However, it requires the pedestrians’ mobile devices to be installed with the IEEE 802.11p enabled module. In Wang et al., 26 an Android application WalkSafe is proposed that uses the back camera of the mobile phone to detect vehicles and possible dangerous situation and alerted the user using sound and vibration. However, it is difficult for the user to put the phone in the suitable position to capture the transportation conditions while walking. A smartphone–based Car2X communication system with the WiFi beacon stuffed is proposed in Dhondge et al. 12 to alert collisions for pedestrians. The authors demonstrate the efficacy of the system to alert the pedestrians even for very high-speed collisions. However, the users’ walking states are not considered. In Zhenyu et al., 27 we present the V2X communication system that can achieve the DSRC- and WiFi-based communication at the time to transmit the safety-related messages to the OBUs of vehicles and the smartphones of pedestrians. Besides, a collision estimation and adaptive alert module are deployed to take the smartphone’s states into consideration to provide the adaptive warnings for pedestrians. The WiFi-based V2P communication performance is also validated and compared with the IEEE 802.11p communication using outdoor experiments. Based on our previous work, we make the extensions with the detailed implementation procedure of the heterogeneous vehicular system, the extensive real world experiments and data analysis for both the DSRC and LTE performance for V2V communication, and the WiFi based V2P communication.
Heterogeneous V2X communication system
System architecture
It has been a consensus that the future vehicular network will be heterogeneous to support communications between devices with diverse moving patterns via several radio interfaces such as DSRC, LTE, and WiFi. Considering this, the system is developed to take advantage of the technologies to provide communication interfaces for various entities. The system architecture is shown in Figure 1. The integrated system is composed of four main components: the DSRC-/LTE-/WiFi-based OBU to put into the vehicle, the tablet inside the vehicle to display driving information for the drivers and passengers, the smartphone handed by pedestrian, and the app server to collect driving data. The vehicle driving information is retrieved from the OBD interface and transferred to the OBU through the Bluetooth module. Then V2V communication realizes the driving information sharing based on the IEEE 802.11p communication. Meanwhile, LTE interface can also be used to realize V2V communication via the application server, that is, vehicle-to-server-to-vehicle (V2S2V). The tablet and smartphone communicate with OBU via the WiFi interface to realize the V2D and V2P communication. Aiming to provide safety protection to pedestrians and drivers of vehicles, we provide adaptive alert for them upon each oncoming collision based on vehicle driving information and the smartphone state to the pedestrians and display warning information on the tablet to the drivers. We describe the implementation of the communication modules of the OBU, V2P communication–based collision estimation, and adaptive alert algorithm for pedestrian protection.

V2X communication system architecture.
OBU implementation
OBU system components
Figure 2(a)–(c) demonstrates the appearance, the disassembly components and hardware architecture of OBU respectively. The communication control system and application unit of OBU are implemented on an alix3d3 board that is running Voyage Linux system. The DSRC module is implemented on the Unex DCMA 86P2 mini-PCI interfaced wireless network adapter. It applies the Atheros AR5414 wireless chipset that is capable to support 5.9 GHz spectrum operation. It is connected to an Omni-directional, 254 mm long antenna. The transmission power is supported from 10 to 23 dBm. Accompanied by the MAC layer configuration and adjustments, it works at the ad-hoc mode to broadcast the WAVE short messages (WSMs). RouterBOARD R52Hn mini-PCI wireless network adapter that supports AR9220 wireless chipset is deployed in the board to support the IEEE 802.11a/b/g/n (WiFi) communication interface. The driver of the WiFi module is modified so that it can work compatible with the IEEE 802.11p module at the same time. The LTE module is employed to support the V2V communication from the way that vehicles upload the messages to the server and download the surroundings’ transport information from the server via Internet. The Bluetooth module is connected to an ELM327 device to fetch the driving information from the on-board diagnostics (OBD). The OBD reader can derive and diagnose the vehicle’s real-time information such as the driving speed, direction and oil volume, and so on from the CAN bus of the vehicle. The GPS receiver with the U-BLOX chip is deployed to provide time synchronization and positioning information for the OBU.

Graphs of OBU: (a) appearance of OBU, (b) disassembly components of OBU, and (c) hardware architecture of OBU.
Communication modules implementation
The communication modules of OBU include the DSRC/WAVE communication module, WiFi module, and LTE module. To support the intra-vehicle communication, V2V, and V2P communication, the following implementations have been accomplished, including the DSRC/WAVE module development, coexistence and collaboration between DSRC, WiFi, and LTE module. The overall architecture of the communication protocol stacks is illustrated in Figure 3.

Communication protocol stacks of OBU.
DSRC/WAVE implementation
To implement the DSRC operation, we choose a mini-PCI Unex DCMA 86P2 wireless card that is based on Atheros AR5414 wireless chipset that originally supported IEEE 802.11a using the ath9k driver. The implementation procedure includes physical layer adjustment, IEEE 802.11p MAC sub-layer implementation, fast channel switching, and WAVE short message protocol development.
All the physical layer operation differences between 802.11p and 802.11a have been adjusted. First, the radio operation frequency, channel bandwidth, data rate, and transmission power are adjusted in the device information structure such as ah->ah_bwmode = AR5K_BWMODE_10MHZ according to the defined rules. The ath9k driver bridges the mac80211 subsystem defined by the Linux kernel and the hardware. The mac80211 subsystem together with cfg80211 module, which is taken as the bridge between the user spaces, the subsystem, and the driver, has defined the networking configuration and network device registration. When the network card is registered to our board, the bandwidth parameter should be valued in the device information structure ah->ah_bwmode = AR5K_BWMODE_10MHZ, where the operation frequency, channel bandwidth, data rate, and transmission power are according to the specific country rules. While the cfg80211 provides a flexible regulatory database for user space, known as the Central Regulator Domain Agent (CRDA). In order to allow the module works according to the specification defined in IEEE 802.11p, a new regulatory rule is added and configured at the start of the WAVE interface. Second, the maximum effective isotropic radiated power (EIRP) of IEEE 802.11p is up to 44.8 dBm. The EIRP cannot be adjusted from the software since it is decided by the wireless chip itself. However, the issue can be solved using the antenna gain or reducing the vehicles’ distance.
The modification of the MAC layer operation can be summarized as: First, the transmission of request to send/clear to send (RTS/CTS) and acknowledgment (ACK) frames are disabled to support safety messages broadcast. Second, the ad-hoc mode is employed where DSRC-based devices can broadcast their presence continuously for connection. Furthermore, the basic service set identification (BSSIDs) that is used to identify the mobile devices is disabled in order to allow devices to transmit messages out of a group. Meanwhile, the transmission of the standard control beacon frames is disabled as well. In IEEE 802.11p, the WSA is transmitted to announce a service by a provider and the users can access the service directly. Therefore, the identification and authentication procedure are not used in the IEEE 802.11p to decrease the latency. Finally, four different priority levels are given by the priority field of the socket buffer structure containing the packet, which is provided by the driver.
To realize the multichannel operation, we use the GPS 1PSS signal to realize time synchronization as suggested in IEEE 1609.4. The GPS 1PPS signal can provide time accuracy to 100 ns, but it cannot be used for the MAC layer directly as it is pulse signal. In our case, the system maintains a 2000 Hz timer to detect the signal and raise an interruption to trigger the corresponding callback function to adjust time stamp so as to verify the timing for channel switching. By this way, the synchronization time deviation is bounded to 0.5 ms. The callback functions are realized via an interactive approach, where the ath9k implements the callback function for mac80211, which implements the cfg80211 callback in return, and the nl80211 provides the connection between the kernel and user space. In IEEE 802.11a, fast switching within 4 ms is not supported. Therefore, in our implementation, the interruption mask is saved into register and the transmission and reception procedures are disabled when channel switching starts. Then, we set the new channel parameters to the structure of ieee80211 local and ieee80211_if_ibss and update the ibss and Wext information. The changed operating channel parameters are notified to the hardware using ieee80211_hw_config function. Finally, the drv_bss_info_changed is called to complete the fast channel switching. The average delay for channel switching is verified to be about 1.7 ms.
To implement the transmission and reception of WSM flows as defined by WAVE short message protocol (WSMP), we use the functions wsm_send, wsm_encap, wsm_send, wsm_decap, and wsm_rcv to realize the transmission from the application layer, the encapsulation of WSM at the network layer, the de-capsulation, and reception at the receiver side, respectively. Meanwhile, the socket transmission is applied. IEEE defines two roles for the WAVE devices. The station that broadcasts WSAs and forms a WBSS is called the “provider,” and the one joins the WAVE-based basic service set (WBSS) is the “user.” A device can be a provider and a user at the same time.
Collaboration between IEEE 802
11p, WiFi, and LTE. We use two wireless network cards to achieve the IEEE 802.11p and WiFi communication. Router BOARD R52Hn mini-PCI wireless network adapter is used to support the WiFi communication using the AR9220 series chipset. The IEEE 802.11p and WiFi both rely on the mac80211 subsystem to operate. It is difficult for the two modules to work simultaneously as they require the same functionalities of mac80211 subsystem to operate differently. For example, IEEE 802.11p does not need to establish the BSS while WiFi communication still needs to join in the BSS and wait for the association and authentication before transmission. Therefore, the problem is how to make these two modules share the same mac80211 subsystem in the Linux wireless subsystem. In the struct net_device, there is a flag named ht_supported that is originally used to judge which wireless network card supports the IEEE 802.11n operation can be used to distinguish the DSRC and WiFi modules.
Besides the IEEE 802.11p and WiFi module, the LTE module is integrated in the system as well. The DSRC module works continuously at the ad-hoc mode to change basic safety WSMs periodically for V2V communication. The V2I communication can be achieved similarly. The LTE module can access the same memory space with IEEE 802.11p and WiFi module to read/write a specific type of messages. And V2V communication can be realized using the LTE module via Internet as well.
Collision estimation and adaptive alert
As pedestrians are addicted to the smartphones and diverting their attention even on the road nowadays, it has been one of the main reasons of traffic accidents involving pedestrians. We implement a collision estimation and adaptive alert module based on the messages from V2P communication on the smart-phone handed by pedestrians to provide safeguard while they are walking. 12 With the messages transferred from the OBU through WiFi, the module can provide the adaptive alert mode based on the smartphone state. The communication and execution procedure of the algorithm is illustrated in Figure 4 and described as the following.

Communication and execution procedure for vehicle and pedestrian safety.
First, the smartphone communicates via the WiFi interface with the OBU when they are close to each other, to receive vehicle driving information using the beacon stuffing method. It then reads the smartphone’s GPS data to get the pedestrian’s location and moving information. Then the latitude and longitude data of the smartphone and OBU will be translated to rectangular plane Gauss-Krüger coordinates system, which are actually the moving vectors of the smartphone and OBU. Afterward, the moving vectors are calculated to determine whether they will have the intersection, and the oncoming-collision delay is less than the safety interaction time threshold; then the pedestrian will be assumed to have the possibilities of getting into a crash. The direction of the vehicle compared with the current pedestrian will also be output, with the collision perdition signal and adaptive alert.
As the pedestrians use the smartphone in different ways, we divide the smartphone states into several kinds to provide the adaptive and efficient alert for pedestrians. The states of smartphone are classified into four kinds: screen-oriented state, voice-oriented state, voice-screen state, and silent state. The state is determined by monitoring whether the user is watching the screen, using earphone or microphone of the smart-phone. Obviously, message texting and e-book reading belong to screen-oriented state, listening to music and calling belong to the voice-oriented state, and the video watching belongs to voice-screen state. To alert the pedestrian in the most proper approach, specifically, in screen-oriented state, we provide the screen message alert, that is, alert message is printed in the screen. While in the voice-oriented state, voice alert is provided. For example, when the threat vehicle comes from the left side, pedestrian will get the special voice “Left side, please pay attention!” In voice-screen state, the pedestrians will get the voice alert and the screen message alert at the same time. In the silent state, no alert is provided in the case of diverting pedestrians’ attention from walking.
Experiments scenarios and procedure
The focus of the experiments is to measure and compare the performance of the 802.11p and LTE-based V2V communications under various transport environments and to verify the feasibility of the WiFi-based V2P communication. The experiments have carried out within duration of nearly 1 year for up to 20 times. Each time, the experiment scenarios and settings are kept the same and described as follows. Figure 5(a)–(b) demonstrates the experiment scenarios and measurement areas.

Experiment scenarios and measurement areas: (a) campus and urban scenario and (b) suburban scenario.
Experiment scenarios
V2V communication
Campus scenario
The campus satellite imagery of the campus is circled by yellow in Figure 5(a). In the campus, the driving speed of the vehicles is restricted to 15 km/h to keep safety. Therefore, we ignore the impact of speed on the communication in this scenario. To evaluate the impact of the pedestrians and intermediate vehicles, we carried out the experiment at the 6:00 in the early morning (off peak) and noon (peak) for three times that all together took 6 h each time. There is one lane in each direction. Each time we deploy six vehicles to drive in an ordinary pattern without considering other vehicles’ moving and six vehicles parked on different lanes in the campus. Assume the vehicles is distributed uniformly in the campus, the traffic density of the communicating cars is approximately 5 vehicles/km. When a vehicle moved to the end of a road segment, and it turned the direction randomly.
Urban street scenario
For the dense traffic urban street scenario, we chose the XingTan Road in the Haidian District of Beijing. It is in the proximity of the east of our campus, as illustrated in Figure 5(a). The road is about 1.1 km and contains one traffic light. There are two lanes in each direction. Each time we deploy 10 vehicles to drive in an ordinary pattern along the road and turn back to drive back when reach the end of the road. The experiment was performed from 7:00 a.m. to 11:00 a.m. The average length of each vehicle drove was about 136 km. Assume the vehicles is distributed uniformly along the road, the traffic density of the communicating cars is approximately 10 vehicles/km. The driving speed varied from 20 to 60 km/h.
Suburban street scenario
In the study of the suburban, the BeiQing road that is between the 5th and 6th Ring of Beijing was chosen as the experiment environment. The road passes through the Haidian District to the Changping District. The total length is 17 km. The experiment was performed 10 rounds each time in the road segment, and the total travel distance was about 180 km, as shown by the yellow line in Figure 5(b). We deploy twenty vehicles in this scenario and every five vehicles construct as a platoon to drive one after another with the separation distance remains nearly 100 m. The speed limit is 70 km/h.
VP communication
In this work, we carried out the uncontrolled experiments with minimal preemptive settings in our campus, an urban street, and suburban district to analyze and compare the IEEE 802.11p and LTE-based V2P communication. The experiment scenarios and procedure are described in the following.
Campus scenario for messages transmission
In the campus scenario, we simply kept two OBUs in the vehicles in different distances and measured the PDR and average latency. We chose separation distances from 0 to 400 m with 50 m intervals. Besides, we did the experiments in two scenarios that one has few obstacles (pedestrians and vehicles) on the road as the line-of-sight case and the other has numerous obstacles as the non-line-of-sight (NLOS) case.
Intersection scenario for feasible alert validation
For the collision estimation and adaptive alert algorithm in the smartphone, experiments were conducted near an intersection of the Xueyuan North Road, which is pointed out by the red rectangular as shown in Figure 5(a). Four mobile phone states while walking were considered: reading the e-book, listening to the music, watching the video, and not using smartphone. We set one vehicle and one pedestrian to meet at the intersection of the road. Pedestrian walked at the speed around 6 km/h while the vehicle moved at the speed around 30 km/h. Safety reaction time threshold and safety intersection time threshold were both set to be 3 s. If the smartphone can alert the pedestrian of oncoming threat using correct alert mode in advance, the alert is considered as a successful one.
Experiment procedure
The procedure of experiments setup and communication performance evaluation includes three steps: experiment setup and data record, log data processing, and performance metrics measurement. There are various of environment factors that could influence the vehicular communication performance, while we only select the traffic density, speed and obstacles as the key factors and ignore the others to make the data analysis procedure more smoothly.
Experiment setup
As for the V2V communication, the experiments deploy 6, 10, and 20 vehicles in the campus, urban street, and suburban district, respectively, with our communication system installed. The snapshot of the OBUs used in experiments is shown in Figure 6. The big-size one is the first generation of the OBU that integrated with the LED display, while we removed the LTE display and battery supply to use the cigar lighter for power supply in the new version to make it more portable. Each testbed serviced as both transmitter and receiver using the DSRC and LTE interface to exchange the driving information that is retrieved from the OBD via the Bluetooth interface. A program is developed using the C programming language on the system to control the vehicular communications during the experiments. The application fetches the driving information from the vehicle via the Bluetooth interface and creates a WSM that is 60 bytes every 300 ms to broadcast it via the DSRC interface. Specifically, the payload of a WSM includes the vehicle ID, transmitting time, and the sequence number of the packet, vehicle’s longitude, latitude, height, and speed. The vehicles will listen to the surroundings to receive the messages via the DSRC module at the same time. Once a packet is received, it will check the payload of the message to identity if it is within its lifetime (the expiry one will not be recorded). Furthermore, the application will record the transmission messages and reception messages added with the reception time to the communication logs, which are used for the data analysis and performance evaluation. A Java application is developed on the laptop to collect the experiments data at the same time. In addition to the transmission via the DSRC interface, the LTE interface is also employed to transmit the safety messages to the server at the same time. Once the application receives a request packet via the LTE from a vehicle, it will add the reception time to the prescriptive bits and send to its neighbors immediately.

Snapshot of the OBUs used in experiments.
As for the WiFi-based V2P communication, the transmission power is set to be 24 dBm, the antenna gain is 6 dB, and the transmission rate is set to be 5.4 Mbps. We kept the OBU and smartphone in different distances from 0 to 400 m with 50 m interval. To investigate the influence of the obstacles, we did the experiments in these two situations when there were few obstacles and numerous obstacles.
Log data processing
A Python program is developed on the laptop to analyze the recorded data. Each row in the log file of a receiver contains the information of one packet as well as the vehicle IDs of the transmitter and the receiver. The total raw experimental data include up to 0.32 million rows. First, the unexpected data that will influence the accuracy of the final results should be removed from the raw data.
During the experiment procedure, the communication blackout happens occasionally. Therefore, the sparse data will bring inaccuracy to the performance measurements. We remove the communication blackout situations from the raw data by removing the data rows that indicate the inter-reception time between two consecutive packets from one receiver is longer than 3 s. As the transmission frequency is 300 ms, three second blackout means that at least 10 packets from one receiver have been lost, so that it is reasonable to make the assumption.
In our experiments, we simply applied the environment conditions and driving speed to reflect the channel conditions of the V2V communications. In the campus scenario, there were few pedestrians and other vehicles in the campus in the off-peak hour. Therefore, we assume the condition is LOS. In contrast, the condition is expected as NLOS in the peak hour. We only consider the communication performance of vehicles in the same straight road and ignore the influence of intersections and buildings in the LOS condition. Therefore, the data represents vehicles were turning directions in the corner is removed in the LOS conditions, but kept in the NLOS conditions. Similarly, the different speed levels in the urban and suburban scenarios are used to classify the driving conditions at a threshold of 30 and 40 km/h, respectively. Whether the experiment environment is LOS or NLOS can be coarsely determined by the traffic density. However, it is difficult to measure the exact traffic density on the road. According to the traffic flow theory, the higher traffic density, the lower driving speeds. Therefore, we use the traffic speed to classify the communication conditions.
Performance metrics
The communication performance was evaluated using the following metrics. Assume the number of vehicles is k,
PDR, defined as the ratio of the actual packet received by a neighbor vehicle to the total packets sent out. The average PDR of the network is defined as the number of the received packets to the number of transmitted packets within the communication range, which is calculated as equation (1)
Latency, defined as the time from the packet is generated by the transmitter to it is successfully delivered to another node within the transmitter’s transmission range.
Data analysis and experiment results
We process the data and analyze the PDR and end-to-end latency of the V2V and V2P communications, and the results are demonstrated separately.
V2V communication
Campus scenario
Figures 7 and 8 illustrate the IEEE 802.11p and LTE-based V2V communication PDR and transmission latency under different inter-separation distances of the communicating vehicles in both the LOS and NLOS cases. For the DSRC-based communication, in the LOS case, the PDR is maintained around 90% when the distance is less than 200 m. Then, the overall trend of the PDR is decreased as the transmission distance increases. At the same time, the transmissions among the vehicles may cause collisions due to the contention characteristic of carrier sense multiple access/collision avoidance (CSMA/CA) employed by DSRC. When the distance reaches 500 m, the PDR falls down dramatically and when the distance reaches 700 m, the PDR is nearly 0. It also indicates that the transmission range of the DSRC module is up to 700 m. In contrast in the LOS case, the communication performance in the NLOS case is worse as the PDR decreases much more quickly with the distance increasing and it is nearly 0 when the communication distance reaches 500 m. As the road slope is almost all the same in the campus environment, we expect that the pedestrians and other intermediate vehicles have caused the fading and degradation to the DSRC-based transmission. As for the DSRC-based communication, the largest latency value is below 30 ms in both cases of DSRC communication. This indicates that the communication distance and environmental factors have little impact on the communication latency, and the extra latency introduced by the contention between vehicles is not obvious; consequently, the extreme situations that the latency reaches up to hundreds of milliseconds have not shown.
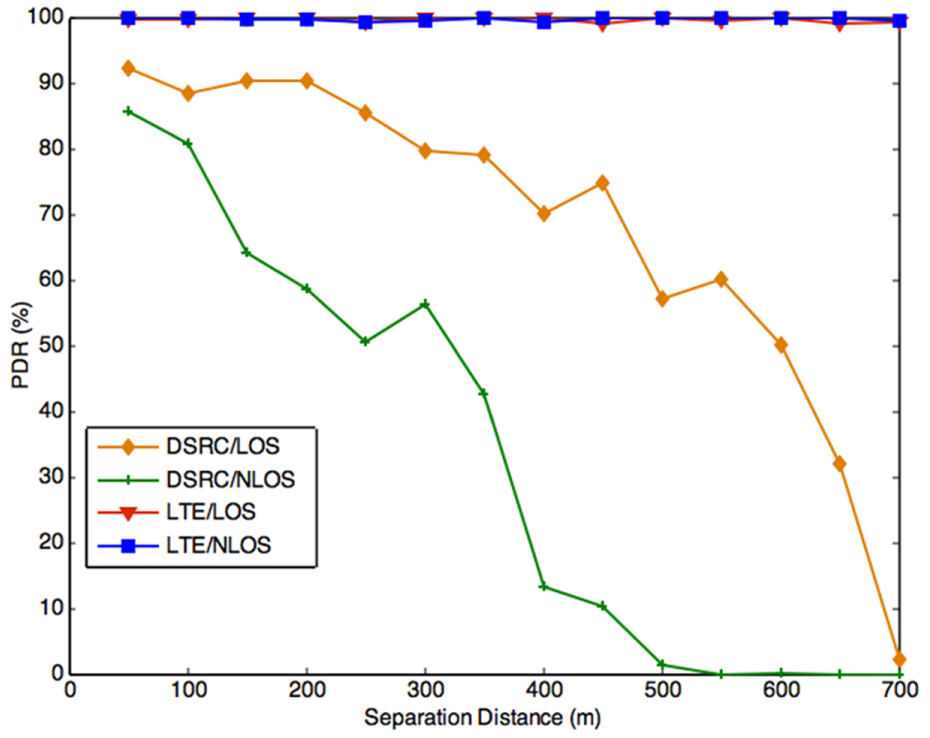
PDR–distance relationship of DSRC- and LTE-based V2V communication measured in the campus.
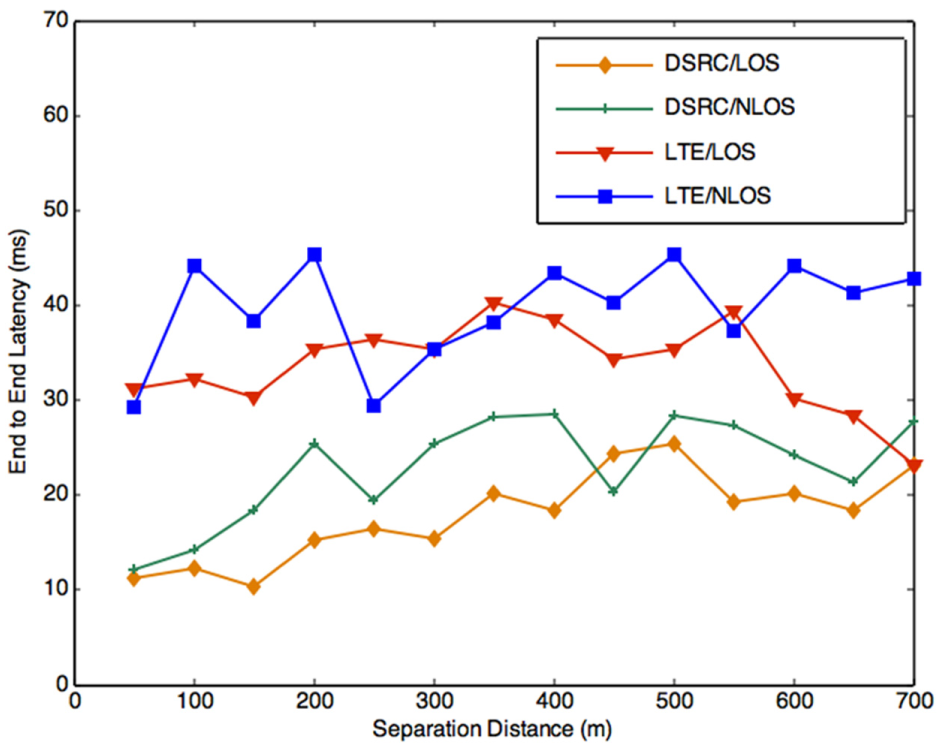
Latency of DSRC- and LTE-based V2V communication measured in the campus.
The LTE based technology is able to provide a highly reliable V2V communication as the PDR is higher than 99% and the latency is also quite stable with no extreme fluctuation. However, the latency is a litter larger than in the DSRC based communication. The reason is that the LTE based V2V communication is realized via an external management server that cause extra delay, while DSRC based is peer-to-peer communication without relaying through another infrastructure.
Urban street scenario
Figures 9 and 10 show the PDR and transmission latency performance of the DSRC- and LTE-based V2V communications in the urban street scenario. The effect factor of the driving speed does not have obvious effect on the PDR. As for the IEEE 802.11p based V2V communication, the performance is unstable and unreliable due to the complex environment factors. The largest communication rang is about 500 m, which is worse than in the campus LOS case. The latency is approximately 30 ms in the high-speed level scenario. The LTE-based V2V communication performs stable and reliable in this scenario.

PDR–distance relationship of DSRC- and LTE-based V2V communication measured in urban street.

Latency of DSRC- and LTE-based V2V communication measured in the urban street.
Suburban street scenario
The vehicle’s driving speed has a direct impact on the PDR of both DSRC- and LTE- based communications. As shown in Figure 11, the PDR is higher in the higher speed level of DSRC-based communication, but has a slight degradation of the LTE-based communication. While for the latency in Figure 12, it has a slight increase in this scenario. The latency is mainly higher than 20ms, and the largest latency is beyond 30ms in the low speed level case. While for the LTE-based communication, the latency is approximately 40 ms, and the PDR stays stable as well.
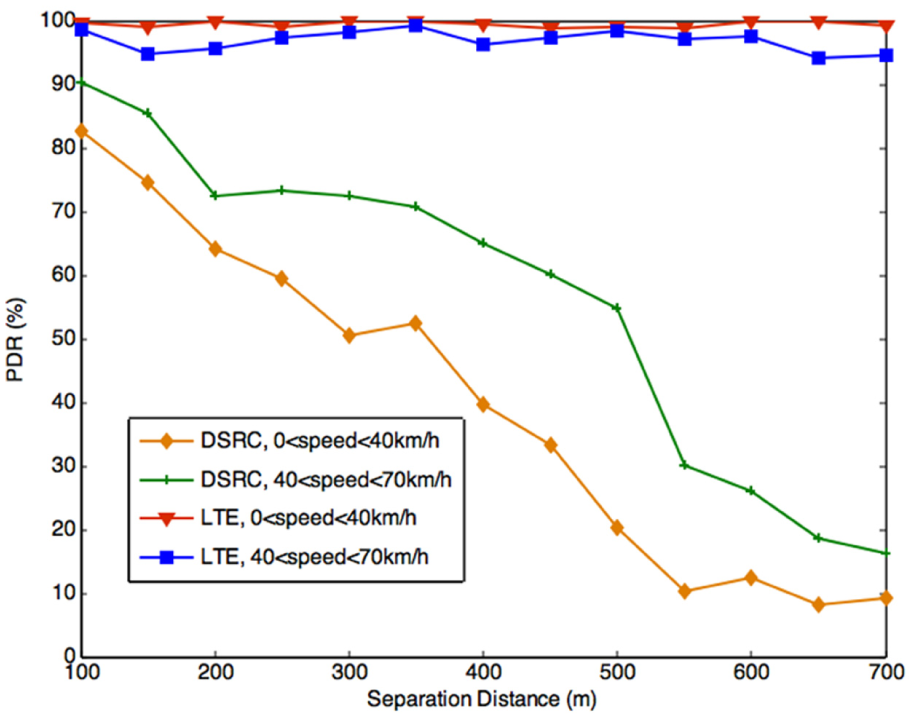
PDR–distance relationship of DSRC- and LTE-based V2V communication measured in suburban.

Latency of DSRC- and LTE-based V2V communication measured in the suburban scenario.
Based on the analysis of the measurement data, we can draw the conclusion that V2V communication reliability is far from ideal using the IEEE 802.11p. The communication distance has a direct impact on the performance while the impact of the traveling speed is not obvious, due to the complex environment factors. The curves of the PDR and latency are not smooth, which indicates the complexity of the external conditions as well. The LTE-based V2V communication has a better performance than the IEEE 802.11p communication when the communicating vehicle density is not dense.
V2P communication
As shown in Figure 13, the PDRs of the DSRC and WiFi based V2P communication decreases obviously as the distance increases. When the distance was less than or equal to 300 m, the PDR of the IEEE 802.11p was greater than or equal to 75.6% in numerous obstacles situation, which means the IEEE 802.11p in our OBU has a good performance. Moreover, obstacles have a huge influence on the PDR. When there were few obstacles, the PDRs of both IEEE 802.11p and WiFi were greater, which means we can set the antennas higher for fewer obstacles. Besides, WiFi can work well when the distance was less than 150 m. If the obstacles were few, the result was better. When the distance of WiFi was up to 250 m with numerous obstacles, there were no packets received. Figure 14 shows that the impact factors of the distance and obstacles have little impact on the average delay for both IEEE 802.11p and WiFi. The average delay of the WiFi which was less than 20 ms was almost 10 ms higher than IEEE 802.11p. However, real-time transmission is all supported.

PDR of DSRC-based V2V and WiFi-based V2P communication measured in the campus scenario.

Latency of DSRC-based V2V and WiFi-based V2P communication measured in the campus scenario.
Conclusion
In this article, we presented the implementation of a heterogeneous vehicular communication system that can support the IEEE 802.11p and LTE-based V2V and WiFi-based V2P communication. Applying the communication system, we have carried out numerous real-world tests in the uncontrolled approach to evaluate the IEEE 802.11p and LTE-based V2V communication performance in terms of the PDR and end-to-end latency. The experiment scenarios include our campus, the urban street, and suburban district. On the basis of the experiments and data analysis, we found that the LTE-based communication performs better than IEEE 802.11p in the reliability (PDR), but has larger communication latency than IEEE 802.11p. When considering the environment factors, we found that the transmission distance, vehicle, and pedestrians have a negative effect on the reliability of the communication system. Meanwhile, the WiFi-based V2P communication performance is measured and compared to the IEEE 802.11p as well. The system was proved to provide the reliable communication for V2V and V2P communications. Meanwhile, the adaptive alert warning algorithm we developed on the system can provide efficient pedestrian safety protection via V2P communication. The communication system is easily deployed in large scale of field tests and application development. What’s more, the real-world experiments we carried out have complemented the literature concerning the IEEE 802.11p and LTE performance measurements and comparison for V2V communications in uncontrolled realistic vehicular environments.
Footnotes
Academic Editor: Khalil El-Khatib
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially sponsored by the National Science Foundation of China (61502045, 61601043), EU FP7 IRSES Mobile Cloud Project (Grant No. 612212), Major projects of national science and technology (2015ZX0300 1030), the 111 Project (No.B08004), and National Key Research and Development Program (2016YFB0100900).