
Abstract
In the cluster-based vehicular cyber-physical systems, the member cardinality is an important parameter for the cluster maintaining and updating. Also, it is widely utilized in the design of protocols for routing, medium access, activation scheduling, and topology control. However, the delay of the traditional member cardinality evaluation method is too large to satisfy the requirement of the high-dynamic vehicular cyber-physical systems. To tackle this problem, in this article, we propose a new member cardinality evaluation method that is based on the time slot occupation technique. The new method can improve the evaluation efficiency and obtain a high evaluation accuracy. Besides, we extend the method to further improve the performance. Finally, we analyze the proposed method considering the unreliability of the channel state. The mathematical analysis and simulation results demonstrate the performance of the proposed method.
Introduction and motivation
Vehicular cyber-physical systems (VCPS) have attracted considerable attention in the past few decades. They hold great potential in enhancing vehicle safety and can improve the traffic efficiency.1,2 Clustering is the basic technique to implement the cooperative communication and computing in VCPS. 3 Cluster head (CH) and cluster member (CM) are the two kinds of vehicle nodes in the cluster-based VCPS. The CH serves as the local coordinator for the CMs associated with it. The number of CMs in a cluster is denoted as the member cardinality. It is an important parameter for the cluster maintaining and updating. Also, in VCPS, it has been widely utilized in the design of protocols for routing, medium access, activation scheduling, and topology control. 4 – 6
In this article, we study the member cardinality evaluation method. Evaluating the member cardinality means we make a judgment on whether the member cardinality is larger or smaller than a given threshold. When vehicles move through an intersection or a fork such as the scene depicted in Figure 1, due to the different driving directions of vehicles, a larger change of member cardinality tends to arise. In order to help adjusting the communication and computing protocols in time, we need to evaluate the member cardinality as soon as possible. The traditional member cardinality evaluation method is based on checking the member list of the CH itself. The delay is more than 2 s which we will explain in section “System description and basic principle.” Since 2 s is too long for the high-dynamic VCPS, we need a more efficient evaluation method.
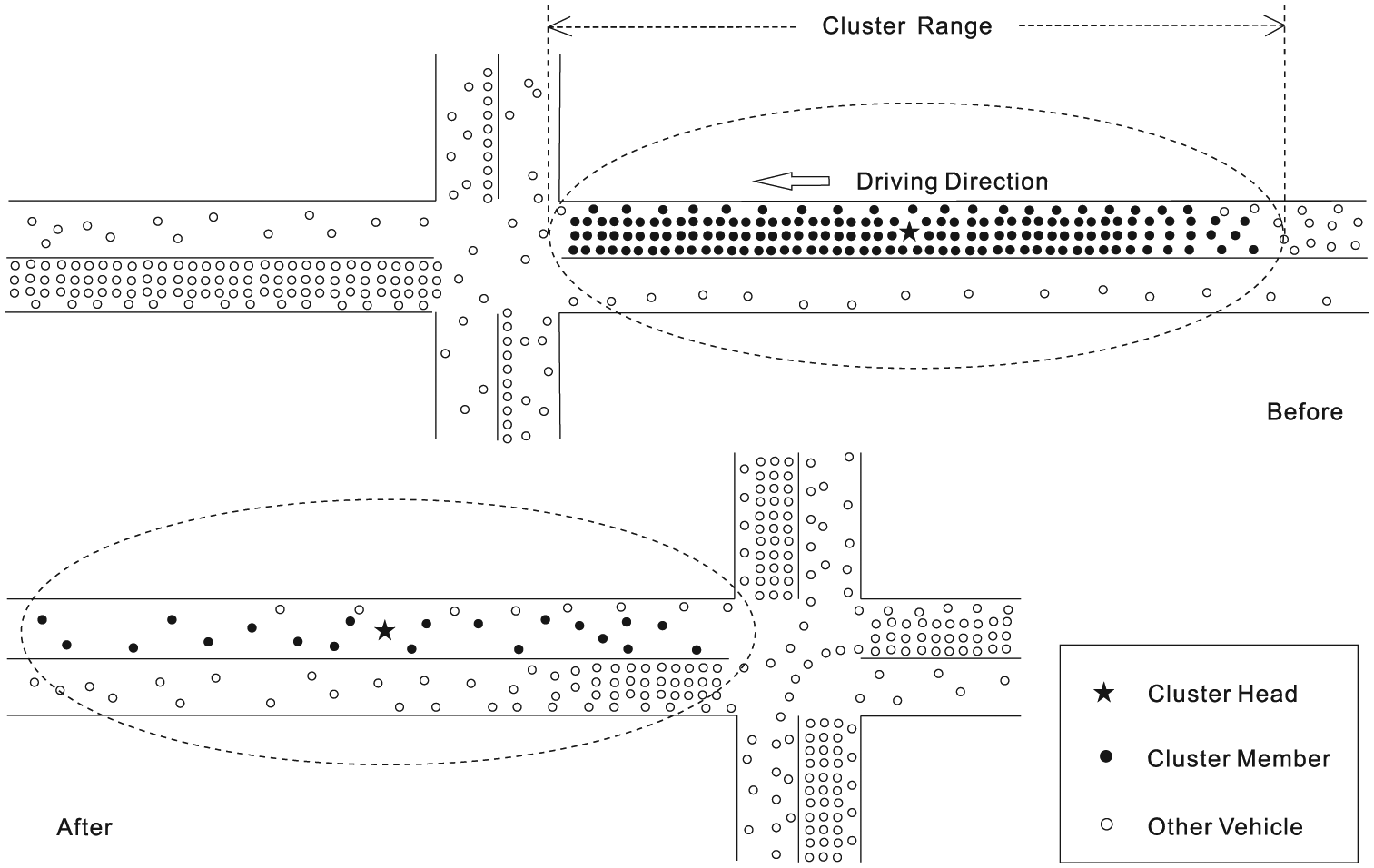
Member cardinality change in the cluster-based VCPS.
To tackle this problem, in our previous conference paper, 7 we proposed a time slot occupation-based member cardinality evaluation method. This article is an extended version of the conference paper. In this article, we further improve the member cardinality evaluation method using an adaptive time slot occupation technology. It is specifically designed for the cluster-based VCPS. By choosing suitable parameters for the proposed method, the CH can evaluate the member cardinality more efficiently and accurately.
Our contributions can be summarized as follows:
We analyze the validity and accuracy of the proposed method and show how to minimize the evaluation time by selecting appropriate parameters.
We propose an adaptive evaluation method which can further reduce the evaluation time and improve the evaluation accuracy.
We analyze the effects of the channel state for the proposed member cardinality evaluation methods.
The rest of this article is organized as follows. In section “Related work,” we summarize the related work. In section “System description and basic principle,” we present the system model and introduce the basic principles of the member change verification method. In section “Parameters determining method,” we describe the detailed method of how to determine reasonable parameters. In section “Adaptive member cardinality evaluation,” we present an adaptive evaluation method to further improve the performance of our method. In section “Considering the channel state,” we analyze the effects of the unreliability of the channel state. We evaluate the performance of our evaluation methods in section “Performance evaluation.” The conclusion is finalized in section “Conclusion.”
Related work
Several methods about member cardinality evaluation have been proposed in the past years. Most of these methods calculate the exact size of the member cardinality and compare it with the threshold to finish the evaluation process. Artimy 8 propose a method that depends on mobility of pattern vehicles to calculate the vehicle cardinality. This method is based on the intuition that if the traffic is dense, the vehicle tends to stop with a great probability. Shirani et al. 9 put forward a novel velocity-aware cardinality calculation method. It only uses the own velocity of a vehicle and its acceleration pattern. Umer et al. 10 calculate the cardinality based on the fluid dynamic model considering the effect of road conditions. However, these traffic flow model–based methods that use their own vehicle information, such as speed, direction, or acceleration, always have a poor accuracy and cannot constrain their verification range in a cluster. They are not suitable for the cluster-based VCPS. Some other researches do the member cardinality calculation using the wireless communication technology. Panichpapiboon and Pattara-atikom11,12 put forward a calculation method based on the communication hop counts in the vicinity of the probe vehicle. They estimate the vehicle density according to the number of vehicles in the vicinity of the probe vehicle. In Mao and Mao, 13 based on a rigorous analysis of the joint distribution of the number of vehicles in each hop, a maximum likelihood estimator of the traffic density can be obtained. In Mertens et al., 14 a beacon-based vehicle cardinality calculation approach is proposed. By checking the neighbor list, the cardinality can be achieved. Rawat et al. 15 propose an approach based on the quantity of collided packets. The intuition behind this approach is that when the traffic is more dense, the packet collision occurs more frequently. All these proposed methods can calculate the cardinality in a cluster. However, just like the traditional method, they all cannot satisfy the requirement of time efficiency in dynamic environments of VCPS.
System description and basic principle
In this article, we consider the cluster-based VCPS that all the communication between vehicle nodes follow IEEE 802.11p standard. The communication range of one node is 250–500 m, which is also the range of a cluster. In this article, we consider the classical vehicle cluster scene that there is only one CH in a cluster, and the member cardinality is 1–1000 within the cluster range.
When the member cardinality has a big change, the member cardinality needs to be evaluated as soon as possible. We define the threshold of the member cardinality as
Different from the traditional method, we initiate the time slot occupation method to evaluate the member cardinality. Our time slot occupation method is depicted in Figure 2. At the beginning of the evaluation, the CH initiates the evaluation process by broadcasting a start signal on a dedicated control channel. This start signal contains the occupation probability p, the number of following time slots f, and some time synchronization messages. Then, the CH changes the work state to observe the channel. We define the time that the CH completes the initiation steps is
Empty time slot (no CM transmits tone signal in this time slot);
Non-empty time slot (one or more CMs transmit tone signal in this time slot).

The time slot occupation method.
Using the time slot occupation method, we convert the member cardinality evaluating into the counting of empty or non-empty time slots. Let

Parameters determining method
The empty slots and non-empty slots
There are two key parameters in the proposed member cardinality evaluation method: the occupation probability p to decide whether to send a tone signal or not in a slot for CMs and the number f to define how many time slots are used to make this evaluation. For the cluster-based VCPS, we need to choose f as small as possible to decrease the evaluation time. We use a variable

The probability that one slot is not empty is

Then, we have


For a given p and f,
The validity of the member cardinality evaluation
In this section, we consider the validity of the member cardinality evaluation.

By solving this equation, we have the lower bound of the number of time slots

However, to ensure the validity of our evaluation, for any p,

By solving this equation, we have the upper bound of the number of time slots

The accuracy of the member cardinality evaluation
In this section, we consider the accuracy of the member cardinality evaluation. We need to choose f and p carefully to ensure that Algorithm 2 has a high confidence to make a correct judgment. For the evaluation accuracy, we request that if

we have


The threshold

We give an example to help understand. If the threshold of the member cardinality is 100, and given

where


We have the following equations


As



Then, by solving the above equations, we have

Determining the evaluation parameters
For the proposed member cardinality evaluation method, on one hand, we need to ensure that the evaluation is valid, and, on the other hand, we need to achieve the required evaluation accuracy. According to the analysis of the above sections, for any

The goal of this article is to minimize the member cardinality evaluation time; we can minimize the number of time slots f by choosing a suitable occupation probability p. Due to the complexity of the function, the closed-form solution for p and f cannot be achieved. Instead, we can calculate them by numerical method. In Table 1, we present some evaluation parameters of the proposed method.
Evaluation parameters satisfied the requirement of validity and accuracy with setting

From Table 1, we can see that the smaller the threshold
Adaptive member cardinality evaluation
The previous section has made a detailed introduction to the slot time occupation technique and the parameter determining process. When the accuracy parameters are fixed, the duration of a evaluation process just depends on
Intuitively, if there are several consecutive empty slots in the beginning of the evaluation, it has a high confidence that

The slot structure of the adaptive member cardinality evaluation method.
Determining the parameter k
We analyze the parameter k first. In the classical vehicle cluster, the maximum member cardinality is 1000 which is defined as

Generally, we set

From the above equation, we can find that the value of k is related to the distribution of

Determining the parameter g
We need to choose a proper g to ensure that if all the first g consecutive slots are non-empty, we have

In Figure 3, there are two state change slots and one feedback slot inserted in the g slots, but the three slots are not counted in the g slots. We use B to denote that all the first g slots are non-empty. Then, we have the following equation

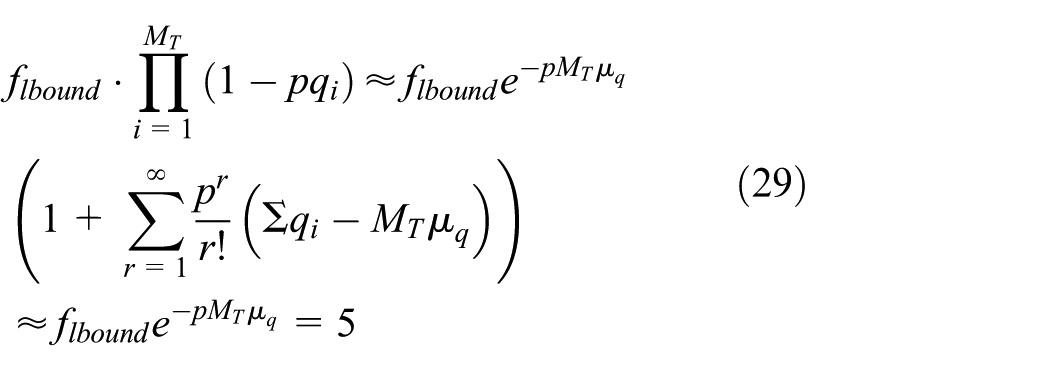
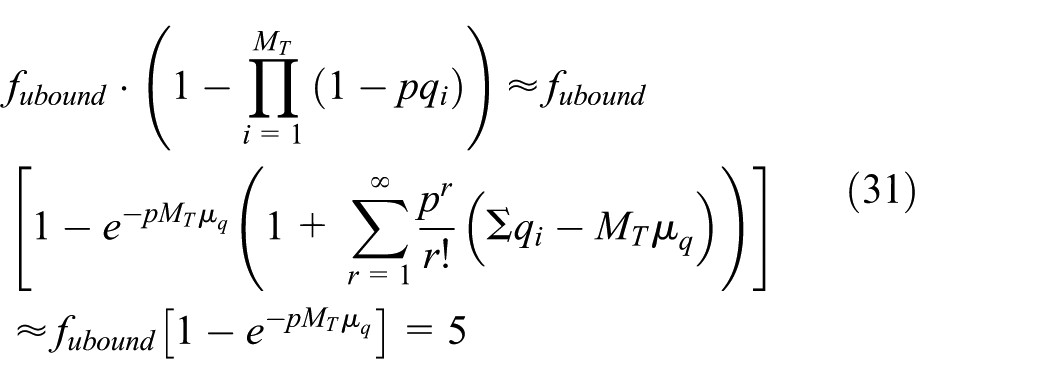
We can obtain the minimum value of g by solving the following equation

The whole adaptive evaluation process
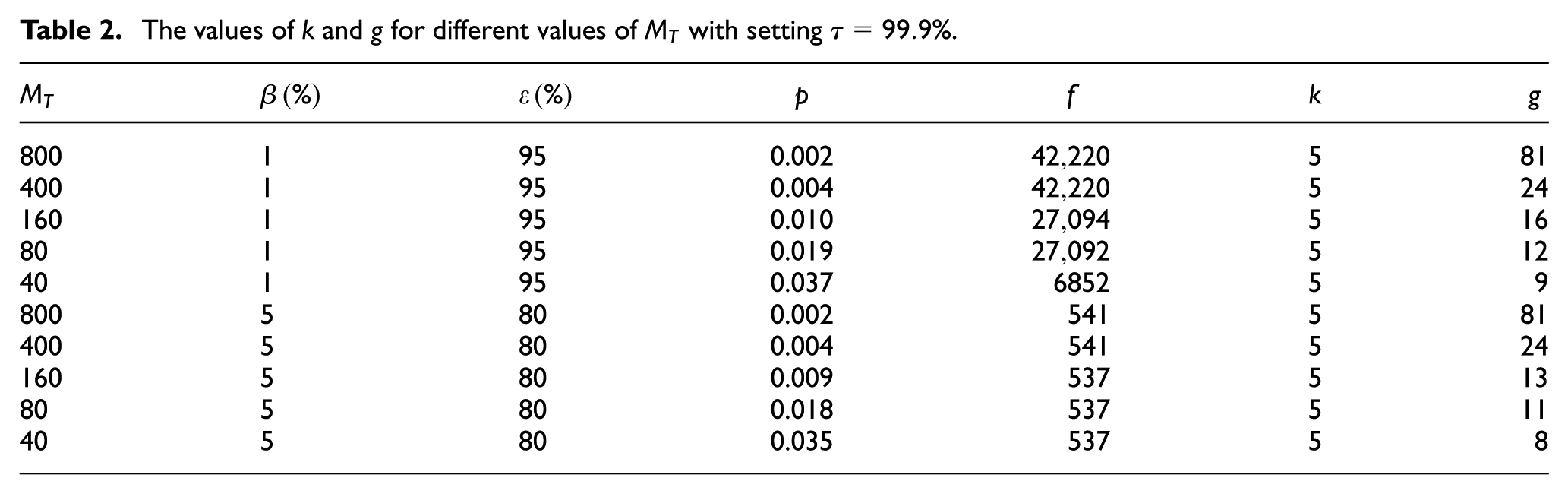
In Table 2, we present the values of k and g for different values of
The values of k and g for different values of
The whole process of our adaptive member cardinality evaluation is presented in Algorithm 2.
Considering the channel state
In the above sections, we analyze the member cardinality evaluation method considering an ideal communication channel. While in the actual VANETs, the channel is unreliable. Even the tone signal has a signal loss problem. In this section, we extend the time slot occupation method by considering the channel state.
In one time slot, we define the CM which needs to send a tone signal as

We define the mean and the variance of
The evaluation validity considering the channel state
Considering the channel state, the lower bound of the number of time slots can be obtained by solving the following equations

The upper bound of the number of time slots can be obtained by solving the following equations

The evaluation accuracy considering the channel state
For the accuracy of the member cardinality evaluation, by considering the channel state, the threshold

According to the analysis in section “Parameters determining method,” we have

Then

Let

According to the conditional variance formula, we have

1. Calculate

2. Calculate


By solving the above equations, we have

After obtaining
Determining k and g considering the channel state
By considering the unreliability of the channel state, similarly with equations (22)–(24), we can obtain k by solving the following equation

Similarly with equations (25)–(27), we can obtain g by solving the following equation

In this article, we consider the Rayleigh fading channels between vehicles. We assume
Evaluation parameters considering the channel state. Setting

The values of k and g considering the channel state with setting

Performance evaluation
Since different kinds of the performances of the proposed member cardinality evaluation methods have been presented in the tables above. In this section, our main concerns are the evaluation accuracy and the average evaluation time. The simulation follows IEEE 802.11p standard, and all the presented results are obtained by averaging over 500 runs.
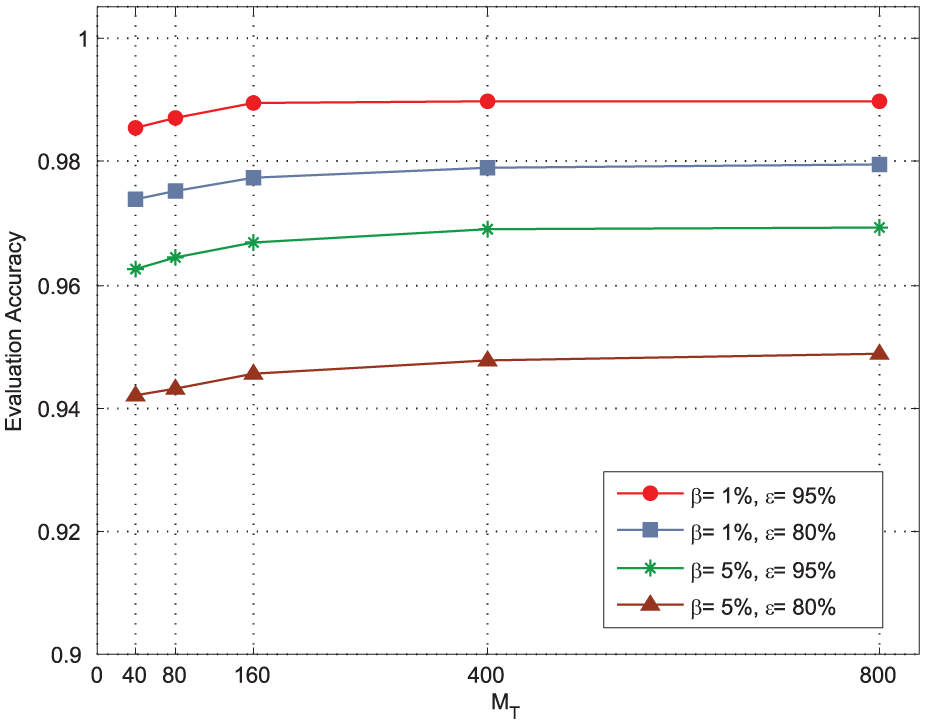
We present evaluation accuracy of the member cardinality under different parameters in Figures 4–7. As a whole, the proposed evaluation methods have a high evaluation accuracy. Figures 4 and 5 compare the evaluation accuracy with the basic evaluation method and the adaptive evaluation method in an ideal channel state. We can find that the adaptive evaluation method can help improve the evaluation accuracy. The same conclusion can be obtained by the comparison between Figures 6 and 7. These two figures present the evaluation accuracy of the basic evaluation method and the adaptive evaluation method in the unreliable channel state. Besides, by comparing Figures 4 and 6 and Figures 5 and 7, we can find that the unreliable channel state affects the accuracy of both the basic and adaptive evaluation methods.

Evaluation accuracy of the basic evaluation method in the ideal channel state.

Evaluation accuracy of the adaptive evaluation method in the ideal channel state.
Evaluation accuracy of the basic evaluation method in the unreliable channel state.

Evaluation accuracy of the adaptive evaluation method in the unreliable channel state.
In Figure 8, we present the average evaluation time of the proposed methods. We set

The average evaluation time.
All the performances prove the accuracy and the efficiency of the proposed member cardinality evaluation method. It is suitable for the cluster-based VCPS.
Conclusion
In this article, we study the problem of how to evaluate the member cardinality in the cluster-based VCPS. We propose a new member cardinality evaluation method based on the time slot occupation technique. The validity and accuracy of the change verification method are analyzed in this article. We propose an adaptive evaluation method which can further reduce the evaluation time and improve the evaluation accuracy, and we analyze the effects of the channel state for the proposed member cardinality evaluation methods. Mathematical analysis and simulation results confirm the efficiency and accuracy of our method.
Footnotes
Academic Editor: Donghyun Kim
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant nos 61471028, 61371069, and 61272505).