
Abstract
This article suggests a new directed broadcasting method with mobility prediction of moving vehicles in vehicular sensor networks (VSNs). VSNs can play a critical role to ensure prompt delivery of real-time sensing data and be able to prevent various road dangers. The suggested method is particularly for vehicle safety communication (VSC) on highway roads by using directed broadcasting between vehicles. In VSNs, broadcasting is the most suitable communication mechanism for VSC. The simplest broadcasting mechanism is flooding, which introduces the redundant message retransmission and the broadcast storm problem. It is because all vehicles rebroadcast the messages in flooding. The broadcast storm problem can be addressed with selective flooding schemes which select rebroadcast vehicles to perform rebroadcasting. However, selective flooding schemes cannot promise enough reliability for VSC because of the highly dynamic topology and frequent disconnections of vehicular networks. Fast movement and frequent topology changes cause repeated link breakages and it increases the packet loss rate of vehicular networks. In this article, we propose a mobility prediction-based directed broadcasting (MPDB) protocol to achieve a reliable broadcasting in VSNs. MPDB protocol broadcasts emergent messages only to the rear vehicles on the same road. MPDB protocol consists of two phases: (i) mobility prediction phase and (ii) broadcasting phase. The mobility prediction can be acquired through periodical beaconing. In mobility prediction phase, each vehicle gets its rear vehicle set on the same road through neighbour’s position, inter-vehicle distance, relative speed and moving direction. In broadcast phase, MPDB protocol selects a vehicle having the largest link available time (LAT) values acquired by the mobility prediction as a rebroadcast vehicle among the rear vehicle set acquired in previous phase. By using LAT for broadcasting propagation, MPDB protocol can intensify the reliability of the message dissemination and also prevent the broadcast storm problem in vehicular networks. The simulation results show that MPDB protocol has better performance improvement in terms of average packet rate and packet delay.
Introduction
Vehicular sensor networks (VSNs) can play a critical role to ensure prompt delivery of real-time sensing data and be able to prevent the road dangers.1–3 VSN is a vehicular ad hoc network (VANET) employing wireless sensor networks (WSN) comprised of a large number of sensor nodes. 4 VANET is a self-organizing VANET comprised of a large number of vehicles. VSN consists of a large number of vehicular sensor nodes to serve various applications on roads. There are two types of sensor nodes in VSN – one is embedded in vehicles and another is deployed in road side units. 4 Autonomous vehicles in use today are already quipped with multiple sensors to sense its environments and navigating without human input.2,5 The various type of sensors in the vehicles produce significant real-time sensing data, such as road surfaces, obstacles, road hazards and the velocity of vehicles, and these data require the prompt delivery. 1 VSN is much more versatile than normal VANET and/or WSN. Currently, the driving safety and driving efficiency have been obstructed through the rapid increase of traffic and congestion on the roads. Consequently, the ratio of traffic accidents and the number of the death are ascending every year. To solve these problems, VSNs have been spotlighted in the road networks. However, currently, there is no standard for VSNs, so they often borrows protocols from MANETs, such as ad hoc on-demand distance vector routing, 6 dynamic source routing 7 and greedy perimeter stateless routing. 8 Theses protocols are preferred as they are able to work in MANET environments, whereas they often aren’t suitable to vehicular road environments.
In typical highway roads, vehicles move along single direction of each road segment while exchanging information with other vehicles.9,10 VSN can provide real-time sensing data on road traffic conditions, weather and a basic Internet service via communication with road side sensor networks. VSN can also provide information about road surfaces, road hazards and road accidents based on communication between vehicle sensor nodes.11,12 When an accident happens on the road, a safety message should be disseminated to all vehicles in the area exposed to potential hazards.13,14 The safety message has to deliver without any time delay to reduce the drivers’ reaction time to potential accident.15,16 The safety message can help human drivers to enable smooth and safe driving by providing the drivers in various hazards environments. If some rear vehicles are not received the emergency message because of the transmission error, the vehicles may be exposed to the accident risk.
Broadcasting is the most suitable communication mechanism for the vehicle safety communication (VSC) in VSN. Flooding is the simplest broadcasting mechanism. It introduces the redundant message retransmission and the broadcast storm problem because all vehicles rebroadcast the received messages. Selective flooding can overcome the broadcast storm problem by only selected rebroadcast vehicles which retransmit the received messages. However, selective flooding schemes cannot promise enough reliability for VSC because of the highly dynamic topology and frequent disconnections of vehicular networks. Vehicular networks have highly dynamic topology change because of the fast movement of vehicles. Fast movement and frequent topology changes cause repeated link breakages. Ultimately, it may increase the packet loss rate. Therefore, a reliable broadcasting protocol for vehicular networks is required.
In this article, we propose a mobility prediction-based directed broadcasting (MPDB) protocol in which the link available time (LAT) is calculated. LAT is acquired by the relative speed, radio transmission range and the inter-vehicle distance among vehicles moving in the same direction and on the same road. LAT can be easily calculated because the movement of vehicles on roads in vehicular networks is usually restricted in just single direction constrained along roads and vehicles are able to get their speed, location and moving directions. Therefore, it is possible for vehicles to predict the future location of the neighbour vehicles by using the relative speed, moving direction and the inter-vehicle distance. When there is an emergency message, first of all, a source vehicle calculates LAT values of its neighbour vehicles and selects a vehicle that has the largest LAT value as a rebroadcast vehicle from the vehicles behind on the same road. Then, the source vehicle broadcasts the emergent messages by adding the rebroadcast vehicles’ ID to the packet. It is because the vehicle that has the largest LAT value may stay in the transmission range of the source vehicle. The selected rebroadcast vehicle operates in the same procedure with the source vehicle. This procedure is repeated until the end of the time-to-live (TLL) of the original message.
The rest of this article is organized as follows: section ‘Related work’ presents related works and section ‘The MPDB protocol’ describes the proposed MPDB scheme. Section ‘Performance evaluation’ shows the simulation results and the performance evaluation using ns-2 simulator to demonstrate that the suggested MPDB can strengthen the reliability of the message dissemination and also prevent the broadcast storm problem compared to other schemes in vehicular networks. Finally, the conclusions and future work are described in ‘Conclusion’ section.
Related work
Broadcasting is considered as the most suitable communication mechanism to disseminate VSC messages. The simplest broadcasting method is flooding. Flooding 16 allows all vehicles to redeliver safety messages to all vehicles in their radio transmission range. However, flooding introduces the redundant message retransmission and broadcast storm problems because all vehicles that have received the message participate in further communication. 10
Various selective flooding schemes are proposed to alleviate the broadcast problem such as urban multi-hop broadcast (UMB), 17 vector-based tracking detection (V-TRADE), 18 velocity and distance based broadcasting protocol (VDBP), 19 acknowledgement broadcast from static to highly mobile (ABSM), 20 distributed vehicular broadcast (DV-CAST) 21 and so on. Selective flooding tackle redundant message retransmission by only the selected rebroadcast vehicles rebroadcast the received message.
UMB 17 protocol is an IEEE 802.11-based directional broadcast protocol where the furthest vehicle from a sender is selected to forward and acknowledge the broadcast packet with handshakes every hop. However, it introduces that the potential rebroadcast vehicles have the longest waiting time before the packet rebroadcasting according to its contention resolution scheme.
V-TRADE 18 protocol is an improved protocol of the track detection (TRADE). It uses the location information of neighbour vehicles through GPS to communicate between vehicles. It classifies neighbours into different forwarding groups. 10 It selects the farthest vehicles in front and behind on a same road as the rebroadcast vehicles. The rebroadcast vehicles only rebroadcast the safety message with the periodic exchange of vehicle location.
VDBP 19 applies a new rebroadcast selection scheme that uses the rebroadcast selection probability considering velocity and distance. The vehicle that has the highest probability obtained from its velocity and distance from the sender vehicle is selected as the rebroadcast vehicle. The vehicle that has the lowest velocity and the farthest distance within the radio range of sender is selected as the rebroadcast vehicle through the probability.
ABSM 20 protocol uses local information acquired via periodic beacon messages that include acknowledgements of received broadcast messages. By using this acknowledgements, sender vehicles can know whether all their neighbours successfully received a broadcast message. ABSM also uses the connected dominating set (CDS) and neighbour elimination scheme. 22 A CDS is computed through periodic beacon messages. Only vehicles belonging to the CDS need to rebroadcast the message and use a shorter waiting time than regular vehicles. Each vehicle maintains two lists, R and N, to reduce the redundant broadcast message. 23 R maintains all vehicles believed to have received the broadcast message and N maintains those neighbour vehicles’ needs to receive the message. ABSM also uses the sore-carry-forward paradigm in when temporary disconnection happens. However, because ABSM is a CDS-based broadcasting, the fewer number of vehicles in the CDS, the less redundant the message. Unfortunately, finding the minimum CDS is NP-hard problem. In VANETs, vehicles are moving very high speeds, but ABSM just uses vehicles’ position to calculate the CDS. So it may be failed to construct efficiently the CDS and it can seriously degrade the performance of ABSM.
DV-CAST 21 protocol consists of neighbour detection, broadcast suppression and store-carry-forward schemes. The neighbour detection uses periodic hello message to build the local topology that is used to rebroadcast a message. 24 If a vehicle receives a packet, then it checks whether the local topology has any neighbour in the broadcast direction or in the opposite direction. If it is true, the broadcast suppression is processed; otherwise, the store-carry-forward mechanism is adapted. However, DV-CAST didn’t show how to distinguish between the same direction and the opposite direction. However, the performance of DV-CAST depends on the frequency of hello update in scenarios with high mobility.
The MPDB protocol
The proposed MPDB protocol is especially applicable to highway safety.
It assumes all vehicles to be equipped with global positioning system (GPS) receivers and omnidirectional radio antennas with the radio range. Vehicles can obtain their location at any time by the GPS receiver. All vehicles have their ID and they are distinguished with their ID. Vehicles move in the one-way road with constant speed randomly.
MPDB protocol broadcasts emergent messages only to the behind vehicles on the same road. It aims to reinforce the reliability of the message dissemination and also prevent the broadcast storm problem in vehicular networks. In MPDB, each vehicle maintains the mobility information that is whether neighbour vehicles are on same (front or behind) or different road via periodic beacon messages. Sender vehicle selects a vehicle having the largest LAT values acquired by the mobility prediction as a rebroadcast vehicle among the behind vehicles coming in the same direction. LAT is calculated by the relative speed, transmission range and the inter-vehicle distance. LAT(i, j) is the time that vehicle j may stay in the transmission range of vehicle i. By using LAT among the behind vehicles coming in the same direction for broadcasting propagation, MPDB protocol can intensify the reliability of the message dissemination and also prevent the broadcast storm problem in vehicular networks. In the state with the mobility information about neighbour vehicles, if there is an emergency message, first of all, a source vehicle calculates LAT values of its following vehicles on the same road and selects a vehicle that has the largest LAT value as a rebroadcast vehicle. Then, the source vehicle broadcasts the emergency message by adding the rebroadcast vehicles’ ID to the packet. The selected rebroadcast vehicle operates in the same procedure with the source vehicle. This procedure is repeated until the end of the TLL of the original message.
Figure 1 shows an example of the rebroadcast vehicle selection of MPDB protocol in a highway scenario. As shown in Figure 1, vehicles A to E are belonging to the dangerous area. The dangerous area is where secondary accidents can be occurred, so the emergency message has to be disseminated the dangerous area. If vehicle S in an accident, vehicles A to E have to receive the emergent message to avoid secondary accidents. In MPDB protocol, each vehicle maintains the mobility information via periodic beacon messages, so vehicle S computes the LAT values of vehicles A and B within its radio range. S selects a rebroadcast vehicle with the largest LAT value. Therefore, the rebroadcast vehicle should be selected from A to E. In MPDB protocol, vehicles F and I are excluded from the rebroadcast vehicle selection because they are moving to the opposite direction.

The rebroadcast vehicle selection of MPDB protocol in a highway. MPDB: mobility prediction-based directed broadcasting.
If any vehicle is not selected as a rebroadcast vehicle in case of low density vehicles, MPDB protocol fulfils the periodic broadcasting instead of the using of the opposite direction vehicles or the different direction vehicles. It is why the using the opposite direction vehicles or the different direction vehicles may occur message collision and disturb their own processes. It is out of keeping with the using LAT value of MPDB protocol.
In MPDB protocol, the mobility prediction can be acquired through periodical beaconing. The mobility includes neighbour’s position, inter-vehicle distance, relative speed and moving direction. MPDB protocol just broadcasts the safety message to the vehicles behind on a same road. If it exists any following vehicle which doesn’t received the safety message, the vehicle may be exposed to the accident risk. Therefore, as shown in algorithm 1, MPDB protocol firstly retrieves which vehicles are on the same road and then which are behind vehicles. Whether two vehicles are on the same road or not depends on the difference of moving directions of them is less than 45°. The moving direction



Here
As shown in Figure 2, whether the vehicles are on a same road is determined by the relative direction of them. The relative direction

The mobility prediction phase of MPDB protocol is shown in algorithm 1. The mobility information can be acquired through periodical beaconing, including ID, position (x, y), speed (V) and direction (

Relative moving direction in MPDB. MPDB: mobility prediction-based directed broadcasting.
Mobility prediction of MPDB protocol.

As shown in algorithm 1, in mobility prediction phase, each vehicle gets its REAR_VEHICLE_SET that contains vehicles behind it on the same road through equations (4) and (5):


LAT value of the neighbour vehicles i and j, LAT(i, j), can be calculated by equation (6). Vehicle i calculates LAT values of all rear vehicles and selects a vehicle with the largest LAT value as a rebroadcast vehicle because the vehicle that has the largest LAT value may stay in the transmission range of vehicle i. In equation (6),
The broadcasting algorithm of MPDB protocol is shown in algorithm 2. As shown in algorithm 2, in broadcast phase, MPDB protocol selects a vehicle having the largest LAT values among the rear vehicle set, which is acquired in mobility prediction phase shown in algorithm 1, as a rebroadcast vehicle.
Broadcasting of MPDB protocol.

MPDB protocol just allows the selected rebroadcast vehicles to rebroadcast the emergent message (EMG_MSG). The selected rebroadcast vehicles are selected only from the rear vehicle set (REAR_VEHICLE_SET) on the same road. The selection of the rebroadcast vehicles is determined by the largest value of the calculated LAT. The source vehicle broadcasts the EMG_MSG by adding the rebroadcast vehicles’ ID to the packet. If the EMG_MSG is received from the other vehicles, a vehicle checks whether it has received before. If the check is true, the vehicle drops the packet, otherwise, it checks whether it is selected to the rebroadcast vehicle. If the check is true, it operates in the same procedure with the source vehicle, otherwise, it drops the EMG_MSG. This procedure is repeated until the end of the TLL of the original EMG_MSG.
For example, in Figure 3, if the source vehicle S gets into car accident on the high road in the highway bridge, then all vehicles contained in REAR_VEHICLE_SET have to receive the EMG_MSG to avoid secondary accidents. S calculates the LAT values of vehicles A and B within its radio range and selects vehicle B as a rebroadcast vehicle in case B’s LAT value is bigger than A’s LAT. Consequentially, S broadcasts the EMG_MSG with B’s ID for a rebroadcast vehicle. So vehicle B can rebroadcast the EMG_MSG without the unnecessary delay caused by the contention between neighbour vehicles. Vehicle A doesn’t do anything and simply drop the EMG_MSG. Vehicle B calculates the LAT values of vehicles C and D within its radio range like vehicle S did. Because vehicles F to I are moving to the opposite directions and vehicles J to M are on the different highway, they don’t participate the broadcasting.
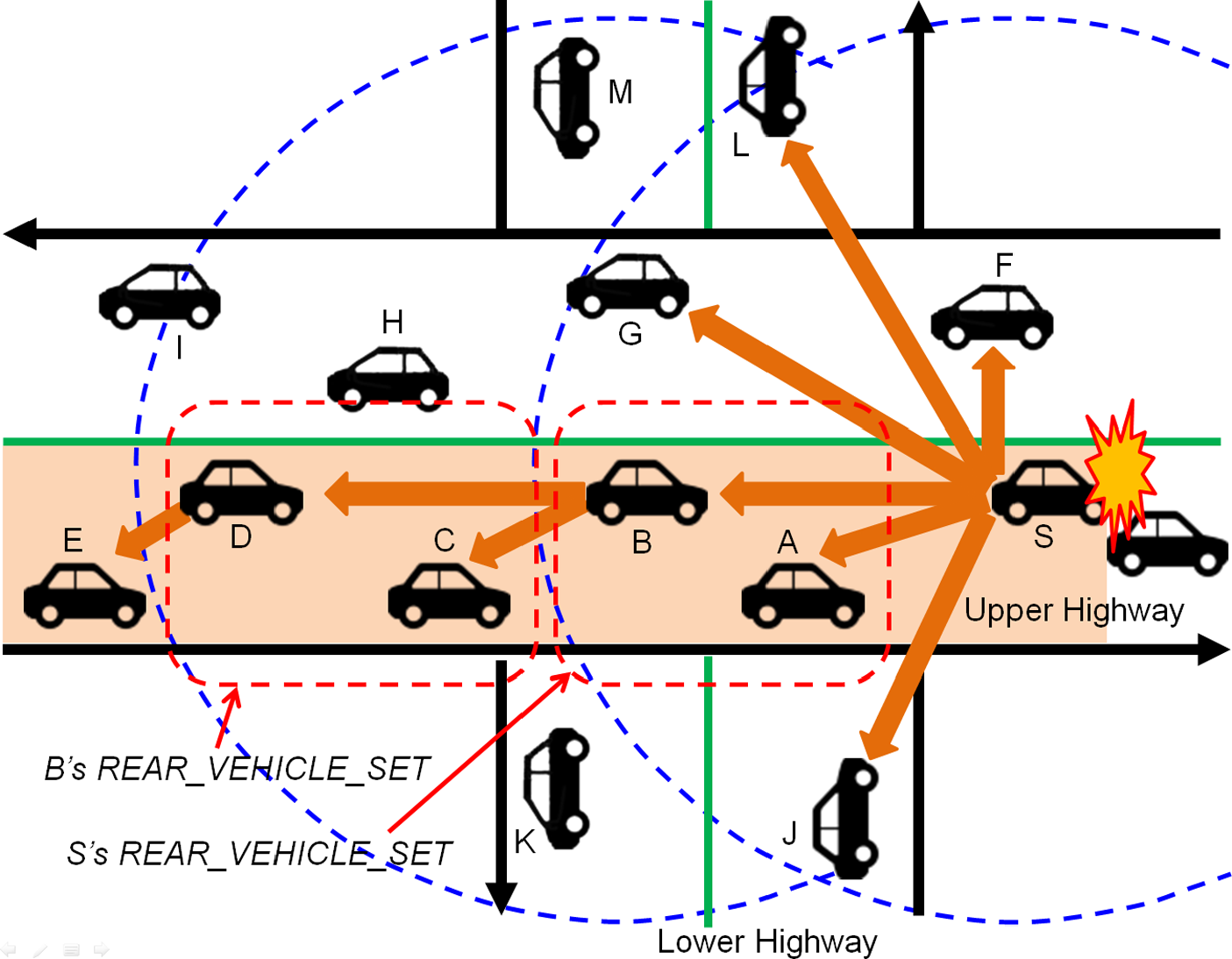
An example of the rebroadcast vehicle selection of MPDB protocol in a highway bridge. MPDB: mobility prediction-based directed broadcasting.
In MPDB protocol, whether the vehicles should rebroadcast the emergency message is decided by their previous hop. It can reduce the unnecessary delay caused by the contention. Furthermore, the selection of rebroadcast vehicles by LAT values can strengthen the reliability of the dissemination of emergency messages.
Performance evaluation
In order to evaluate the performance of the proposed MPDB protocol, we simulated the existing V-TRADE and VDBP in terms of the packet arrival rate and the packet delay using the ns-2 simulator. The simulations are based on the IEEE 802.11b of MAC layer. The transport protocol is user datagram protocol and the packet type is constant bit rate. Each simulation is performed during 200 s. The vehicle moving speed is randomly set between 0 and 120 km h−1. The number of vehicles is increased from 0 to 50. The time interval of beaconing is 2 s. The bandwidth and packet size are 2 Mbps and 512 bytes, respectively. To improving reliability of the simulation, it is performed thrice and used average values which are calculated through excluded maximum and minimum values.
The other related parameters of each simulation are listed in Table 1.
Simulation parameters.

Figures 4 to 6 show the packet arrival rate, the packet error rate and the packet delay rate according to vehicle density from 0 to 50, respectively.

Packet arrival rate according to vehicle density.

Packet error rate according to vehicle density.

Packet delay according to vehicle density.
The packet arrival rate is the percentage of vehicles that successfully received the packet. As shown in Figure 4, MPDB is superior to V-TRADE and VDBP. V-TRADE and MPDB have the more vehicles the better packet arrival rate. It is may explained why the more vehicles the more candidate vehicles. They can select the vehicles on a same road as the rebroadcast vehicles. On the other hand, VDBP shows that the packet arrival rate rises up until the number of vehicles is by 30. When the number of vehicles is more than 30, the packet arrival rate of VDBP drops a little further. It is because VDBP uses the relay selection probability only considering velocity and distance. V-TRADE and MPDB consider moving direction on the same road, but VDBP doesn’t. V-TRADE and VDBP select rebroadcast vehicle the farthest vehicle from each group and source vehicle, respectively. It may cause the packet error rate to rise.
The packet error rate is also performed on a scale of 0–50 vehicles. As shown in Figure 5, the packet error rates of V-TRADE and VDBP are higher than one of MPDB. They all have worse packet error rate in 10 vehicles. This is because the sparse density caused link breakage to rise. However, as the number of vehicles increased, MPDB shows the lower packet error rate than V-TRADE and VDBP. V-TRADE and MPDB, like the packet arrival rate, show a similar pattern to the number of vehicles. However, MPDB has the better packet error rate than V-TRADE. This is because MPDB can predict more accurately the mobility of neighbour vehicles than V-TRADE. VDBP selects the vehicle with the largest LAT value as the rebroadcast vehicle in the rear vehicle set so that each selected rebroadcast vehicle can cover most vehicles and rear vehicles can receive the broadcast packets successfully. Therefore, the broadcast packets are propagated without link breakage which is generated by the deviated vehicles from transmission range of the source vehicles by using the LAT through the mobility prediction. On the other hand, in case of V-TRADE and VDBP, the packet error rate according to link breakage is also generated. This is because, they select rebroadcast vehicle according to distance between source vehicles and neighbour vehicles.
Figure 6 shows the packet delay according to vehicle density from 0 to 50. As shown in Figure 6, MPDB has lower packet delay compared with V-TRADE and VDBP. This is because, MPDB selects the rebroadcast vehicles according to the moving speed of neighbour vehicles and distance between source vehicles and neighbour vehicles. Most important of all, in MPDB, the rebroadcast vehicle can rebroadcast the message without the unnecessary delay caused by the contention between neighbour vehicles. It is why, whether the vehicles should rebroadcast the broadcast packet is decided by their previous hop. Furthermore, the broadcast packets are propagated without delay according to link breakage which is generated by deviated vehicles from transmission range of the source vehicles. On the other hand, in case of V-TRADE and VDBP, delay according to link breakage is generated. This is because, they select rebroadcast vehicle according to distance between source vehicles and neighbour vehicles.
Figure 7 shows the packet delay and packet error rate according to number of vehicles. As shown in Figure 7, V-TRADE and VDBP have the higher packet delay time and packet error rate in case vehicles are 10. This is because the delay caused by link breakage. However, in case of V-TRADE and VDBP, when the number of vehicles are 30, the delay and packet error rate are rapidly decreased. On the other hand, the proposed MPDB has lower packet delay and packet error rate compared with the V-TRADE and VDBP. In particular, MPDB has similar packet delay according to number of vehicles. This is because MPDB does not allow packet loss according to link breakage between the rebroadcast vehicles through the use of the LAT value. In other words, because MPDB can predict the future location of the neighbour vehicles by using the relative speed, moving direction and the inter-vehicle distance, and it just select the rebroadcast vehicle in the rear vehicle set, MPDB can reduce packet delay more than V-TRADE and VDBP even if the packet error rate is high.

Packet delay according to packet error rate.
Conclusion
In this article, we proposed a MPDB to achieve a reliable broadcasting in VSNs. It aims to reinforce the reliability of the message dissemination and prevent the broadcast storm problem in vehicular networks. The predicted mobility includes neighbour’s position, inter-vehicle distance, relative speed, and moving direction. In the MPDB, the source vehicle broadcasts emergent messages only to the vehicles behind on the same road and moving in the same direction by the predicted mobility. The MPDB selects a vehicle having the largest LAT values acquired by the mobility prediction as a rebroadcast vehicle. In MPDB, whether the vehicles should rebroadcast the emergent message is decided by their previous hop. It can reduce the unnecessary delay caused by the contention between neighbour vehicles. Furthermore, the selection of rebroadcast vehicles by LAT can strengthen the reliability of the message dissemination. In order to evaluate the performance of the proposed MPDB, we simulated the packet arrival rate and the packet delay using the ns-2 simulator. The simulation results showed that the MPDB has better performance improvement in both the average packet rate and the packet delay in highway scenario. In the future, we aim to improve the MPDB to be adoptable in sparse vehicle density and various city scenarios.
Footnotes
Declaration of Conflicting Interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (NRF2013R1A1A2012299). And this work was partially supported by a grant-in-aid of HANWHA THALES.