
Abstract
To improve the reliability of vehicle state parameter estimation, a vehicle state fusion estimation method based on dichotomy is proposed. An extended Kalman filter algorithm is designed based on the vehicle 3 degrees of freedom dynamic model. Meanwhile, considering the influence of dynamic model and sensor noise and its coefficient selection on the estimation results, a radial basis function neural network estimation algorithm is designed. To further improve the reliability of the estimation algorithm, a method of estimation algorithm fusion is proposed based on the idea of mutual compensation between model- and data-driven estimation algorithms. The weights of the estimation results of different algorithms are assigned through the dichotomy. The redundancy and fusion of estimation algorithms can improve estimation performance. The effectiveness of the fusion method is verified by the co-simulation of MATLAB/Simulink and CarSim, and the real vehicle test. The results show that the change trend of the estimation result is consistent with the actual state parameters change trend, and the estimation accuracy after algorithm fusion is significantly improved compared to a single extended Kalman filter or radial basis function.
Keywords
Introduction
Active safety control plays an important role in reducing the incidence of accidents, these systems, such as electronic stability program,1,2 roll stability control,3,4 and electric brake-force distribution,5,6 are related to lateral and longitudinal dynamics. All these control systems can significantly improve the stability control of vehicles, which is by judging the driving environment in advance and accurately intervening in driving. However, the control systems need the many vehicle parameters to participate, among which the side slip, yaw rate and longitudinal speed are difficult to be obtained directly. Therefore, researchers combined the algorithm with the existing sensors on the vehicle to obtain the estimation values of these state parameters that are difficult to be obtained directly.
The commonly used vehicle state parameter estimation methods include Kalman filter (KF) and its improved algorithms,7–17 neural network estimation algorithms,18–20 and other related estimation algorithms.21–27 However, single estimation algorithms have their own limitations, such as the uncertainty of mathematical model parameters, noise parameters, and the coverage of training samples, which will affect the estimation results and may lead to the sudden divergence of estimation accuracy. Therefore, for the problems about the single estimation algorithm, researchers integrate different estimation theories to improve the performance of the whole estimation system through the redundancy and fusion of the algorithm. In the study of fusion estimation algorithms, W Wenkang et al. 28 use the interacting multiple model method to realize the fusion of two square root cubature KF with different mathematical models. G Liu and LQ Jin 29 use the interacting multiple model method to combine the cubature KF with different mathematical models to estimate the side slip angle and wheel lateral force. T Chen et al. 30 use the weighted iterative fusion method to fuse the strong tracking filter with the ridge estimation algorithm to obtain the longitudinal and lateral vehicle speeds, and the side slip angle. X Li et al. 31 use the adaptive federated fusion algorithm to fuse the adaptive auxiliary filter and the extended Kalman filter (EKF) to estimate the side slip angle and yaw rate. A fusion method proposed by W Liu et al., 12 which combines the minimum model error algorithm with the EKF algorithm to estimate the side slip angle. BL Gao et al. 32 use the dual KF fusion technology to fuse the results estimated by simplified tire magic formula and wheel dynamic formula, which can realize the estimation of road adhesion coefficient. However, these above-mentioned fusion algorithms need to rely on the construction of mathematical model, which make the structure of the fusion algorithm complex and large amount of calculation. To solve this problem, a hybrid-driven estimator based on dichotomy is proposed by combining EKF algorithm based on model driven and radial basis function (RBF) neural network algorithm based on data-driven.
In this article, an EKF algorithm based on vehicle dynamics model is designed. Through the state space equation and observation equation, it can establish the mapping relationship between system input and estimated object. According to this mapping relationship, an RBF neural network estimator without dynamic modeling is designed. A KF algorithm is designed based on 2 degrees of freedom (2-DOF) dynamic model, and is used to obtain estimation values of the side slip angle and yaw rate, which are used as reference values (RVs). Meanwhile, the RV of longitudinal speed is obtained by calculation formula. The weighted fusion of vehicle state estimation results is realized using the dichotomy method, which distributes different weights to outcome of different estimation algorithms judged by error between different estimation values and RVs. This fusion method can suppress the decline of accuracy when a single algorithm estimates different targets, and ensures the reliability of the estimation system and the universality of the fusion method.
The rest of this article is organized as follows. In the “Vehicle dynamic model” section, the 2-DOF and 3-DOF vehicle dynamic models have been established. The “Proposed estimator of vehicle state parallel estimation based on multi-source fusion” section introduces the components of the new fusion estimation method by dichotomy. In addition, the analysis and discussion of the simulation and real vehicle experimental results will be shown in the “Results and discussion” and the “Real vehicle test” sections, respectively. Finally, the conclusion and summary are given in the “Conclusion” section.
Vehicle dynamic model
2-DOF vehicle dynamic model
The KF will be used in this article. Therefore, a 2-DOF vehicle dynamic model is established, 33 as shown in equation (1)

where ωr represents yaw rate, a represents the distance between centroid and front axle, b represents the distance between centroid and rear axle, k1 and k2 represent the cornering stiffness of the front and rear axles, respectively, Vx represents longitudinal speed, Iz represents moment of inertia, δ represents the steering angle of front wheel, and β represents side slip angle.
Meanwhile, 2-DOF state function and observation function can be obtained

Among them

where

3-DOF vehicle dynamic model
Based on the 2-DOF dynamic model, longitudinal speed is added as a DOF. The 3-DOF vehicle dynamic model is shown in Figure 1.

3-DOF vehicle dynamics model considering longitudinal speed.
In Figure 1, Fy1 and Fy2 represent the lateral force of the ground to the front and rear wheels, respectively, Vy represents the lateral speed, and α1 and α2 represent the side slip angle of the front and rear wheels, respectively.
The 3-DOF vehicle dynamic model is established, 34 as shown in equation (3)

where ax represents the longitudinal acceleration.
The state function is

where k1 and k2 can be represented the form as below 35


where ay represents the lateral acceleration.
The observation function is

Proposed estimator of vehicle state parallel estimation based on multi-source fusion
This article establishes a new fusion estimation method to estimate the yaw rate, side slip angle, and longitudinal speed. The structure diagram of the proposed fusion estimation method is shown in Figure 2. The proposed fusion method consists of four parts: (1) EKF estimator based on model-driven; (2) the RBF neural network estimator based on data-driven; (3) the RVs are obtained from KF or algebraic formula, which is used as the benchmark value; and (4) the fusion estimation algorithm (FEA) based on dichotomy will assign appropriate weight to the estimation values of the two algorithms, respectively, and then output a new fitted signal.

Estimator architecture.
Extended KF algorithm
The EKF is to simplify the linearization of the nonlinear state by first-order Taylor expansion, which ignores the higher-order terms for the state function. From the “Vehicle dynamic model” section, the 3-DOF dynamic equation considering the longitudinal speed is obtained. Furthermore, linearize the state equation and observation equation to obtain the linearized model.
Based on equations (4) and (5), functions (6) and (7), including process noise and observation noise, can be obtained

The

Equations (6) and (7) can be written in the following form

where
The Jacobian matrix is obtained by partial differentiation of the state equation and the observation equation, respectively, and the Jacobian matrix is shown as below



where
First-order linearized form of the dynamic model can be written as


One calculation cycle of EKF is as follows:
Step 1: Initialization initial state
Step 2: State prediction

Step 3: Observation prediction

Step 4: Fig out the first-order linearized expression of the state equation, and solve the state transition matrix

Step 5: Fig out the first-order linearized expression of the observation equation, and solve the observation matrix

Step 6: Fig out the covariance matrix

Step 7: Solve Kalman gain

Step 8: Status update

Step 9: Covariance update

Radial basis function neural network algorithm
RBF neural network is an artificial neural network that uses RBFs as activation function. The RBF neural network in this article is used to estimate the vehicle state parameters.
The differential equation (1) of the vehicle 3-DOF dynamic model obtained in the “Vehicle dynamic model” section is transformed into the state function form, as shown in equation (19)

It can be seen from equation (19) that the change of the system state variable is determined by the system input, and it can be considered that exist a mapping relationship between the state variable and the state input. When steering wheel angle and longitudinal acceleration determined, the equations about yaw rate, side slip angle, and longitudinal speed have unique solutions. There is a specific functional relationship between them, as shown in formulas (20)–(22)



To make the training sample basically cover the driving condition, the set operation conditions are shown in Table 1.
Obtain driving conditions of training samples.

The training sample is obtained by the co-simulation of CarSim and MATLAB/Simulink. The steering wheel angle and longitudinal acceleration are collected by CarSim as the input of training sample, which corresponding yaw rate, side slip angle, and longitudinal speed are used as the output of training sample. The collected data sets are divided into training samples and test samples. Finally, the trained RBF neural network can be used for state estimation.
As shown in Figure 3, the structure of the RBF in this article contains two layers, a hidden radial basis layer of A1 neurons and an output-linear layer of A2 neurons. To reduce the training time of neural network, the 15,000 groups of data are obtained by interval value processing, and finally, 3000 groups of data are obtained. Based on the Kolmogorov theory, the number of neurons in the hidden layer is set to 5. The RBF neural network estimation methods are introduced by Schwenker et al. 36 The related RBF is radf(n) = e-n2, the purelin represents linear transfer function, and||dist|| is Euclidean distance weight function.

Radial basis function neural network architecture.
In Figure 3,
N represents number of elements in input vector;
A 1 represents number of neurons in hidden layer;
A 2 represents number of neurons in linear layer;
X represents input sample.
b 1 and b2 are neuron thresholds of hidden and linear layers, respectively;
op 1 represents the results calculated by RBF radf and the function is shown as below

op 2 represents the results calculated by linear transfer function purelin and the function is shown as below

The training process of RBF neural network is as follows
1. Calculation error ej

where dj represents the expected output, f(Xj) represents the network prediction output, Xj represents the input of the jth neuron, Ti represents neuronal center, and ωi represents connection weight.
2. Calculate the output weight change

Then, use formula (25) to adjust the weight

where η1 represents the learning rate when the weight is adjusted.
3. The central changes of neurons in the hidden layer were calculated

The adjustment center is shown as equation (27)

where η2 represents the learning rate when the center change is adjusted.
4. Calculate the change of output weight

Adjust the width is shown as equation (29)

where η3 represents the learning rate when the center width is adjusted.
5. Calculate the total error value

Fusion estimation algorithm
In the “Extended KF algorithm” and the “Radial basis function neural network algorithm” sections, the two kinds of estimation algorithm have been stated clearly. The determination for different estimation algorithm weights will be considered in this section. In this selection, the RV and determination of weights corresponding to different estimation algorithms are included.
The function of the RV is regarded as a benchmark. Therefore, there is no high precision requirement for the prediction result of the RV. It only needs to be consistent with the actual change trend of the estimated object. The KF algorithm based on 2-DOF vehicle dynamic model is used to obtain the yaw rate and side slip angle, and be as benchmark value. The workflow of KF is shown in Figure 4.
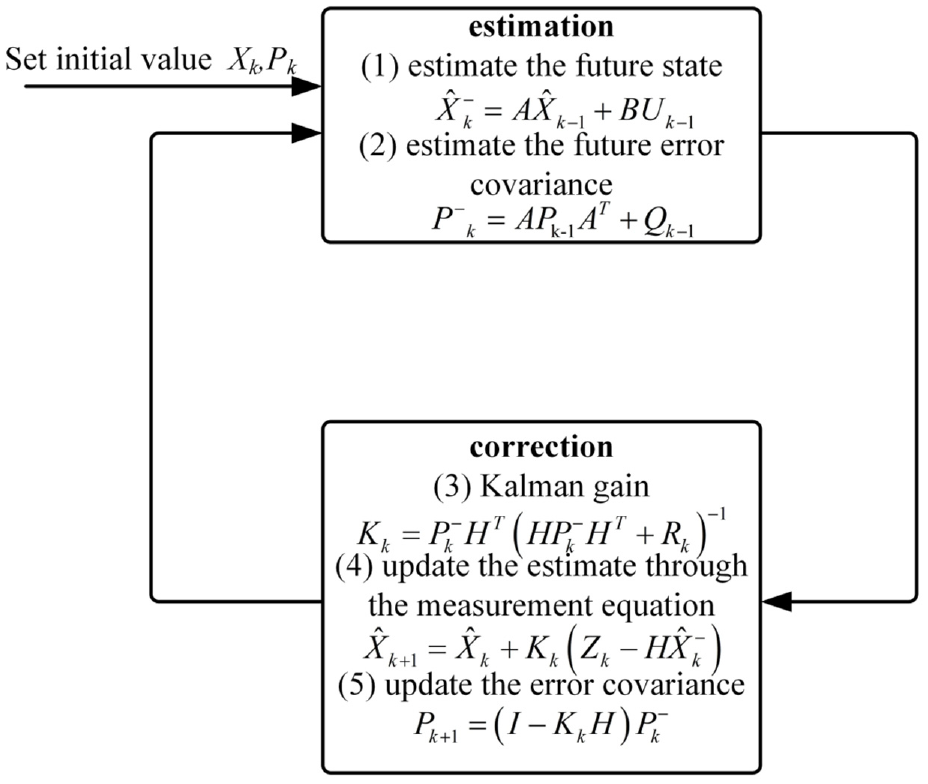
Workflow of KF.
In Figure 4,
The formula is applied to the selection of the RV for longitudinal speed as below 37

When the estimation results of different estimation algorithms have been collected, the dichotomy is used to search for the weight in the FEA. The basis of the selection is at a certain moment, the error 1(e1) is the error between the estimation value of algorithm 1 and the RV, the error 2(e2) is the error between the estimation value of algorithm 2 and the RV.
In a certain step k, the proportional relationship between e1(k) and e2(k) is determined by dichotomy, which is converted into the form of weight and assigned to different estimation algorithms. The smaller error has a greater weight of the estimation algorithm, and a new estimated signal is fitted finally. The diagram is shown in Figure 5, and the determination of weights can be divided into two cases.

Diagram of prediction error.
The weight search steps are as follows:
Step 1: Obtaining the target estimation value, RV and obtaining error

where xREF_L represents the RV, the
Step 2: Searching weigh

where d represents the weight precision, and s and r represent weight search range [r, s].
Step 3: output update

Results and discussion
The experiment was completed by related simulation software and true value output by simulation software. Table 2 shows the relevant parameters of the vehicle model in the simulation software.
Vehicle parameters.

Estimated results of side slip angle
The side slip angle experimental results are shown in Figures 6–8.

Comparison of estimation value of EKF, RBF, and RV with true value of side slip angle.

Comparison of estimation value of FEA with true value of side slip angle.

Relative error with non-zero true value of side slip angle.
In the figure, the beta of ekf, the beta of rbf, and the beta of opt is the side slip angle estimated by the EKF, RBF algorithms, and FEA, respectively. Meanwhile, the beta of true is true value of side slip angle obtained by CarSim, and beta of ref is RV of side slip angle.
It can be seen from Figure 6 that the beta of ref can well reflect the change trend of the actual side slip angle. At the same time, the estimation values of the side slip angle obtained by EKF and RBF have a small deviation from the true value, and the average of absolute error between them and the true value is 0.1176 and 0.1512, respectively. In Figure 7, the estimation result of FEA is consistent with the true value, and the average of absolute error of FEA is 0.0802. The estimation accuracy of FEA is 31.80% higher than EKF and 46.95% higher than RBF. Therefore, the estimation result of FEA is better than the estimation result of a single estimation algorithm. The relative error result can be seen from Figure 8, and the relative error of the estimation value of FEA is within 13%.
Estimated results of yaw rate
The yaw rate experimental results are shown in Figures 9–11.

Comparison of estimation value of EKF, RBF, and FEA with true value of yaw rate.

Comparison of estimation value of FEA with true value of yaw rate.

Relative error with non-zero true value of yaw rate.
In the figure, ω of ekf, ω of rbf, and ω of opt are the yaw rate estimated by the EKF, RBF algorithms, and FEA, respectively. Meanwhile, the ω of true is true value of yaw rate obtained by CarSim, and ω of ref is RV of yaw rate.
It can be seen from Figure 9 that the ω of ref can well reflect the change trend of the actual yaw rate. At the same time, the results estimated by the RBF algorithm and the EKF algorithm are quite different. The result of the EKF began to shift in the third second, its accuracy gradually reduced until the eighth second. On the contrary, the estimation result of the yaw rate by the RBF is close to the true value except for the slight fluctuation in the first 2.5 s. The estimation result of FEA can be seen from Figure 10 that the estimated accuracy has a short drop in 3.1–3.5 and 5.3–6.5 s, but it returns to normal immediately. Except for two short fluctuations, the average absolute errors of FEA, EKF, and RBF are 0.5825, 9.3653, and 0.5914, respectively. The estimation accuracy of FEA is 93.37% higher than EKF and 1.5% higher than RBF. Therefore, the estimation result of FEA is better than that of the single estimation algorithm. The relative error with non-zero true value can be seen from Figure 11, and the relative error of the estimation value of FEA is within 14%.
Estimated results of longitudinal speed
The longitudinal speed experimental results are shown in Figure 12.

(a) Comparison of EKF, RBF, and RV with true value, (b) comparison between estimation value of FEA and true value, (c) comparison of absolute error of EKF and RBF with FEA, and (d) relative error of longitudinal speed estimation value of FEA.
In the figure, the Vx of ekf, Vx of rbf, and Vx of opt are the longitudinal speed estimated by the EKF, RBF, and FEA, respectively. Meanwhile, the Vx of true is true value of longitudinal speed obtained by CarSim, and Vx of ref is RV of longitudinal speed.
It can be seen from Figure 12(a) that the Vx of ref can well reflect the change trend of the actual longitudinal speed. At the same time, the accuracy of longitudinal speed estimation results obtained by EKF is lower, but the estimation value change trend is consistent with the true value. On the contrary, the estimation result of the longitudinal speed by the RBF is close to the true value except for the two fluctuations in the 0–2.5 and 9.3–10 s. It can be seen from Figure 12(b) that under the weight distribution of the FEA, the final estimation value can maintain high consistency with the true value of longitudinal speed. As shown in Figure 12(c), the estimation results of EKF, RBF, and FEA are evaluated by the average value of absolute error, which are 9.57, 7.332, and 1.96, respectively. Therefore, the estimated accuracy of FEA is 79.5% higher than EKF, and 73.2% higher than RBF. It can be seen from the comparison that the estimation result after the FEA is better than the estimation result of a single estimation algorithm, and the relative error of the estimation value of FEA is still within 12% in Figure 12(d).
Real vehicle test
Through the co-simulation results of CarSim and MATLAB/Simulink in the “Results and discussion” section, the feasibility of the vehicle state fusion estimation method based on dichotomy is preliminarily verified. In this section, the vehicle state fusion estimation method is further verified through the real vehicle test. However, due to the limitation of equipment acquisition capacity, the true value of side slip angle cannot be collected.
In this section, under the driving condition of double lane change, the yaw rate and longitudinal speed are estimated using the FEA, and compared with the true values collected by the equipment. The real vehicle test workflow is shown in Figure 13, and the ωr_exp and Vx_exp represent the yaw rate and longitudinal speed obtained by acquisition equipment, respectively.

Real vehicle test workflow.
The hardware equipment involved in the real vehicle test includes: real vehicle, CANoe analyzer, gyroscope, and GPS antenna. Through CANoe analyzer, gyroscope, and GPS antenna, the state parameters, which is include front wheel angle, yaw rate, longitudinal speed, longitudinal acceleration, and lateral acceleration during driving, are collected. The collected data are divided into two parts: the one part is used for the training of RBF neural network and the other part of the data is used as the input of the estimation system for the estimation of yaw rate and longitudinal vehicle speed. Finally, the collected yaw rate and longitudinal vehicle speed are compared with the estimation results to verify the proposed fusion estimation method.
The signal curves of the longitudinal acceleration, lateral acceleration, and steering wheel angle are shown in Figures 14–16.

Longitudinal acceleration.

Lateral acceleration.

Front wheel steer angle.
The experiment results are shown in Figures 17–20, and the ω/Vx of EKF, ω/Vx of RBF, and ω/Vx of REF represent the outcome obtained by EKF, RBF, and RV, respectively. The ω/Vx of opt represents the estimation result obtained by FEA and the ω/Vx of mv represents the measured value.

The yaw rate obtained by different methods.

The final estimation value and the experimental value of yaw rate.

The longitudinal speed obtained by different methods.

The final estimation value and the experimental value of longitudinal speed.
The ω of REF in Figure 17 can reflect the change trend of the actual yaw rate. At the same time, the estimation values of EKF and RBF are similar, but their estimation results of yaw rate are different at 2.2–2.8 and 5.6–6 s, respectively. Finally, the estimation values of EKF and RBF are fused by FEA to obtain the final estimation value, as shown in the ω of opt of Figure 18.
The Vx of REF in Figure 19 can reflect the change trend of the actual longitudinal speed. At the same time, the estimation values of EKF and RBF are generally similar, but their estimation results of longitudinal speed are different at 0–0.23, 2–2.85, and 3.8–5.1 s, respectively. Finally, the estimation values of EKF and RBF are fused by FEA to obtain the final estimation value, as shown in the Vx of opt of Figure 20.
It can be seen from Figures 18 and 20 that the estimation result after FEA maintains high consistency with the true value. To further verify the superiority of the fusion estimation method proposed in this article, the root mean square (RMS) error between the estimation value and the true value is used to evaluate the estimation performance, which can be expressed as

where
The eRMS can be seen in Table 3, it can be found that the RMS errors of yaw rate and longitudinal speed estimated based on FEA is less than EKF and RBF, indicating that FEA can better suppress the error of single algorithm and improve the estimation accuracy. Compared with the RMS of EKF and RBF, the FEA is increased by 57.2% and 45.1%, respectively, in estimation of yaw rate, and compared with the 0.8135 of RMS of other FEAs, 38 the FEA is increased by 71.2%. Compared with the RMS of EKF and RBF, the FEA is increased by 96.2% and 83.4%, respectively, in estimation of longitudinal speed, and compared with the 0.6876 of RMS of other FEAs, 39 the FEA is increased by 80.4%.
Root mean square error comparison.

EKF: extended Kalman filter; RBF: radial basis function; FEA: fusion estimation algorithm.
Conclusion
The EKF estimator is designed based on the vehicle dynamic model. At the same time, the operating conditions that the estimation results are inaccurate or unable to be estimated when the measurement noise is non-Gaussian noise or the observation sensor is disabled are considered. An RBF neural network estimator is designed, which does not depend on the dynamic model and is not affected by the observation sensor.
The vehicle dynamics model estimator is combined with the non-vehicle dynamics model estimator, and the dichotomy is used to find the weights of different estimation results, which can realize the fusion of vehicle state estimation algorithms and improve the performance of the estimation system.
Through the co-simulation, the fusion method is verified. The results based on real vehicle test show that the proposed fusion method can maintain high consistency between the final estimation value and the true value, and accurately reflect the change trend of vehicle state parameters.
Footnotes
Handling Editor: Yanjiao Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: After examination, this paper is supported by the Scientific Research Foundation of Fujian University of Technology (grant no. GY-Z19010).