
Abstract
In this paper, we consider the optimal deployment of multiple assets in anti-submarine warfare (ASW) operations with time-dependent strategies. We model this as a zero-sum game that takes place over a finite time horizon. An agent, representing multiple assets, in an ASW operation, decides on the allocation of these assets (e.g., one or more frigates and helicopters) to prevent an intruder, an enemy submarine, from attacking a moving high-value unit (HVU), e.g., a tanker ship. Hereby, the agent aims to prevent an intruder, an enemy submarine, from attacking a moving HVU, e.g., a tanker ship. The intruder is deciding on a route that minimizes the detection probability given the agent’s strategy. We first consider a game model where a part of the agent’s strategy, namely the complete strategy of a frigate, is known to the intruder; and second, we consider a sequential game approach where the exact location of the frigate becomes known to the intruder at the start of each time interval. For both approaches, we construct (integer) linear programs, give complexity results, and use an algorithmic approach to determine optimal strategies. Finally, we explore the added value of this approach in comparison to a traditional ASW simulation model.
1. Introduction
Submarines pose an important naval threat to naval fleets and capital ships, as previous conflicts show.1,2 In this paper, we discuss a model to optimize anti-submarine warfare (ASW) operations. The aim of an ASW operation is to detect and hunt an enemy submarine or to protect one or multiple high-value units (HVUs), like a tanker ship or a navy task group, against attacks from enemy submarines. Different types of ASW operations exist depending on the aim (detection or preventing an attack) and whether the area of interest is stationary or in transit, i.e., moving with a task group. Preventing an attack can be achieved either by conducting a barrier search operation or a transit operation. The goal of a barrier search operation is to ensure that an enemy submarine will not cross a certain barrier. In a transit operation HVUs are moving from one side of an area to the other side. During this transit the HVUs have to be protected from the attacks of enemy submarines.
In this paper, we focus on a transit operation where one or multiple HVUs have to be protected. By adjusting the input parameters, however, the proposed model can also be used for (barrier) search operations. In order to tackle this problem we introduce two different game theoretic approaches for ASW operation and extend several aspects of known approaches to overcome their limitations. We also compare the results obtained with predefined tactics in a simulation approach
To prevent an attack, the defender (agent) can deploy various different platforms, each with their own characteristics. Frigates have a long endurance but are relatively slow, while helicopters are faster but have a shorter endurance. For the deployment of these units, tactics have been developed. A tactic describes when a unit is used, when it uses its sensors (for instance sonar) to detect the submarine, the path that is followed by the unit, and how it reacts to a positive detection. The optimal tactic depends upon, among other factors, the environment, e.g., the water depth, the detection distance, and the possibility for the submarine to hide; and the behavior of the submarine, e..g., when it attacks, whether it is prepared to take more risk in an attack, and how it makes use of the information it has about how the defender will act. Many of these aspects are unknown to the defender. This means that the number of possible tactics is very high, as well as there being uncertainty about the circumstances that determine which tactical is optimal.
The game discussed in this paper is a special variant of a search game.3–8 In search games, an intruder is attacking one or multiple cells on a graph while an agent is searching the graph to prevent the attack. An overview of search games is given by Hohzaki. 5 The main difference from these traditional search games is that we consider an agent that is able to deploy multiple assets of different types (frigates and helicopters), while in the traditional search games only a single asset type is used.
Several ASW models are discussed in the literature.9–14 Mishra et al. give an overview of various papers related to ASW problems, and they describe several issues that may complicate the analysis, such as dimensionality of the resulting model and coordination of multiple assets. 11 Thomas describes different models for the planning of multiple ASW platforms for the protection of a HVU. 14 The coordination of multiple platforms is considered using a game theoretic approach to take into account the intruder’s behavior. Hew and Yiap consider the patrolling at choke points. By patrolling at choke points, the enemy submarine is deterred or has to take a longer route. 10 They develop an interdiction game to determine the optimal randomized allocation of resources to different choke points.
In Brown et al. 9 and Monsuur et al. 12 the authors developed a game theoretical ASW model for the protection of a single HVU. The intruder chooses a path from outside the area to the HVU. The agents can deploy multiple assets: frigates, helicopters, or submarines. The intruder can observe the frigates, so it is assumed that the locations of the frigates are fixed and common knowledge. The allocation of the helicopters and submarines follows a probability distribution. The work of Brown et al. and Monsuur et al. only models a fixed HVU and a static strategy of the agent, comparable to a barrier search operation. Usually, however, the HVU is moving from one location to another, and the frigate should be able to patrol at several locations over time. Therefore, we extend the static model by adding a time aspect. The HVU is moving over time, and the strategies of both the agent and the intruder are time-dependent. This allows us to model more realistic instances and better react to a moving intruder. When modeling this problem as a dynamic model, two different strategies are used. First, we assume that the frigate’s location is known for the complete time window. Second, we develop a model where the frigate’s current location becomes known to the intruder at the start of each time interval. Therefore, in this case the frigate’s location is also allowed to follow a probability distribution. For both models, the agent always aims at maximizing the probability that the intruder is detected.
In order to assess the effectiveness of ASW tactics, simulation approaches have been developed, like DEVS 15 and ODIN. 16 Another simulation approach has been developed at the Netherlands Organisation for Applied Scientific Research (TNO) for the support of the development and evaluation of operational tactics and future concepts for underwater operations: the Underwater Warfare Testbed (UWT). 17 As opposed to DEVS 15 and ODIN, 16 this model includes the behavior of all platforms that play a role in the underwater domain: both surface platforms, submarines, and torpedoes. This behavior is scripted in the scenario and depends on the environment, detected contacts, the purpose of the mission of the platform, and the risk it is willing to take. In the UWT, existing and/or future platforms and underwater systems can be modeled in the underwater environment to evaluate the overall performance of several tactics and concepts. The modeling of the enemy submarine must, however, be scripted in advance. This means that interactions between submarine and defender are preferably relatively simple as otherwise the scripts become very complicated. For a transit operation, two basic strategies are available: a kamikaze-like approach in which the submarine chooses the shortest path towards the HVU, and a cautious approach in which the submarine tries to avoid detection. In order to more realistically model an enemy submarine as an intelligent intruder that takes into account the strategies of the defender, we use a game theoretic approach.
The rest of this paper is organized as follows. First, we consider the game with complete information about the frigate’s position. We shortly describe the static game model, and thereafter we develop the model used for dynamic allocation of assets where the strategies are time-dependent. Second, we consider a sequential game approach in which the location of the frigate (defending asset) is known to the intruder at the beginning of each time interval. We then present computations for the proposed game approaches as well as a comparison with the UWT simulation approach. We finish with some concluding remarks.
2. Complete information about the frigate’s location
In this section, we describe the game in which the frigate’s location is known for each time step. We first describe the static model as introduced by Brown et al., 9 and thereafter we describe the extended model with time-dependent strategies.
2.1 Protection of a static HVU
The static game is modeled as a zero-sum game where the agent (defender) is maximizing the detection probability for each route that the intruder, representing the enemy submarine, can choose from. 9 For the agent, different assets (frigates, helicopters, and submarines) are modeled and the detection rates are specified for each asset. We only consider frigates and helicopters for the agent; submarines can be modeled similarly to helicopters.
The game is played over a network with cells,
By choosing the allocation of frigates and helicopters, the detection rate at each cell
The agent’s strategy can be found by solving 9 :
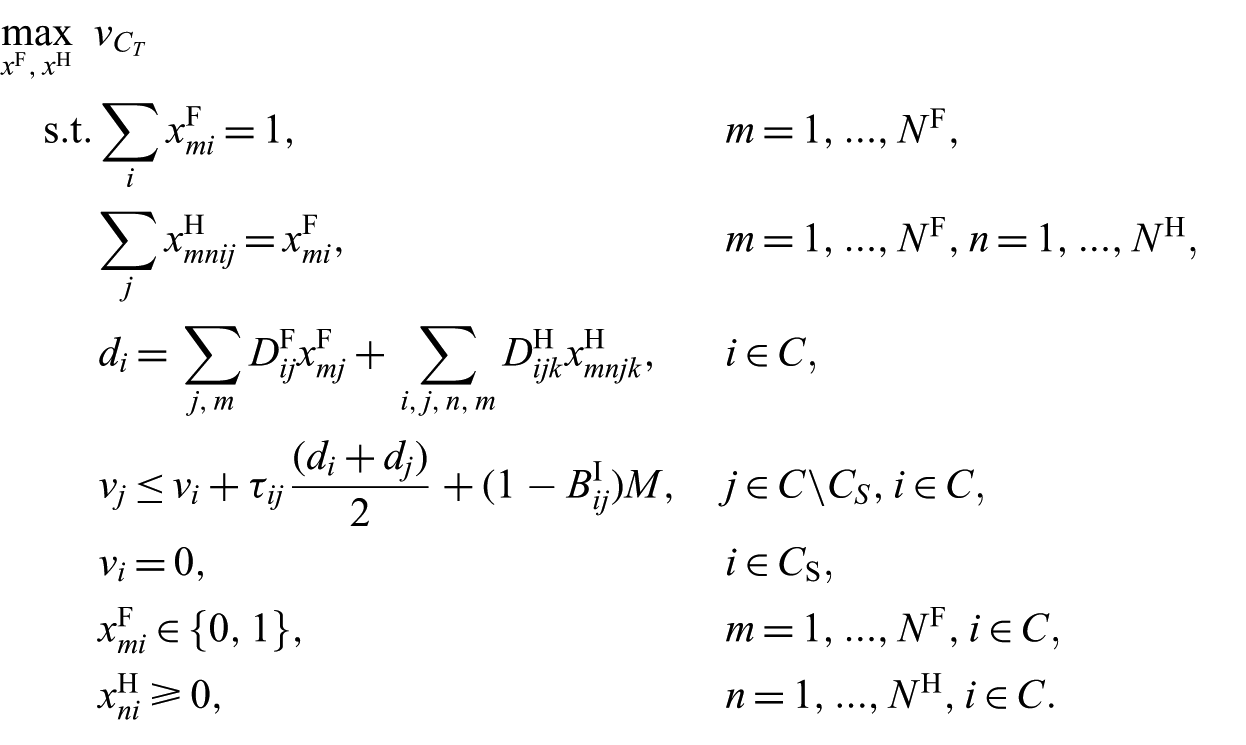
The first constraint ensures that each frigate is only assigned to one location. The second constraint makes sure that all helicopters are assigned to a cell such that helicopters corresponding to a frigate in a specific cell can only be assigned if the frigate is in that cell. The third constraint calculates the total detection probability for each cell. The fourth constraint is used to calculate for each cell the probability of detecting the intruder when this intruder is choosing a route to that cell. Here, it is assumed that the intruders will always choose the route to the cell that minimizes this detection probability.
The agent wants to maximize the probability of detecting the intruder. The agent is only interested in maximizing the detection probabilities over the routes that end at the target cell
2.2 Dynamic game with time-dependent strategies
In this section, we extend the static model of Brown et al. 9 by modeling a moving HVU and time-dependent strategies for both the agent and the intruder. The HVU is moving during the game, and the position of the HVU is known in advance to both the agent and the intruder.
For the agent’s strategy, we only consider frigates and helicopters. Other assets, such as submarines, can be added in a similar way. At each time step, the agent can decide on a new position for the frigates and the helicopters, similar to the static game. The location of each frigate is limited by the speed of that frigate. As in the static game, the location of each frigate is known to the intruder, while the exact locations of the helicopters are not. The intruder represents the enemy submarine that is aiming at attacking the HVU. The intruder’s strategy also changes, when compared to the static game. The intruder is still allowed to choose any path starting in one of the starting locations. Additionally, it might be optimal for the intruder to wait at a cell for a fixed amount of time.
2.2.1 Model description
The game takes place over a network of
The HVU follows a fixed path that is known to both the agent and the intruder. For each time
The actions of the agents consist of two elements: the allocation of the frigates, which is known to the intruder, and the allocation of the helicopters, which is randomized. There are
The location of the frigates during each time window is given by
Each frigate has a number of helicopters that can be deployed. An action of a single helicopter is modeled by a probability distribution over the cells depending on the frigate’s location. Let

The action of the intruder is also given by a route through the network. Similar to the frigate, the time to move between cells is given by
The detection rate of the frigates and helicopters is given by

For modelling purposes we introduce a fictive cell, cell
Given the detection probabilities

The agent is maximizing this function by choosing the routes for the frigates and allocations for the helicopters, while the intruder is minimizing this by deciding on a route.
2.2.2 Construction of the integer linear program
We write
Consider the agent’s allocation of the frigates and helicopters to determine the detection rates
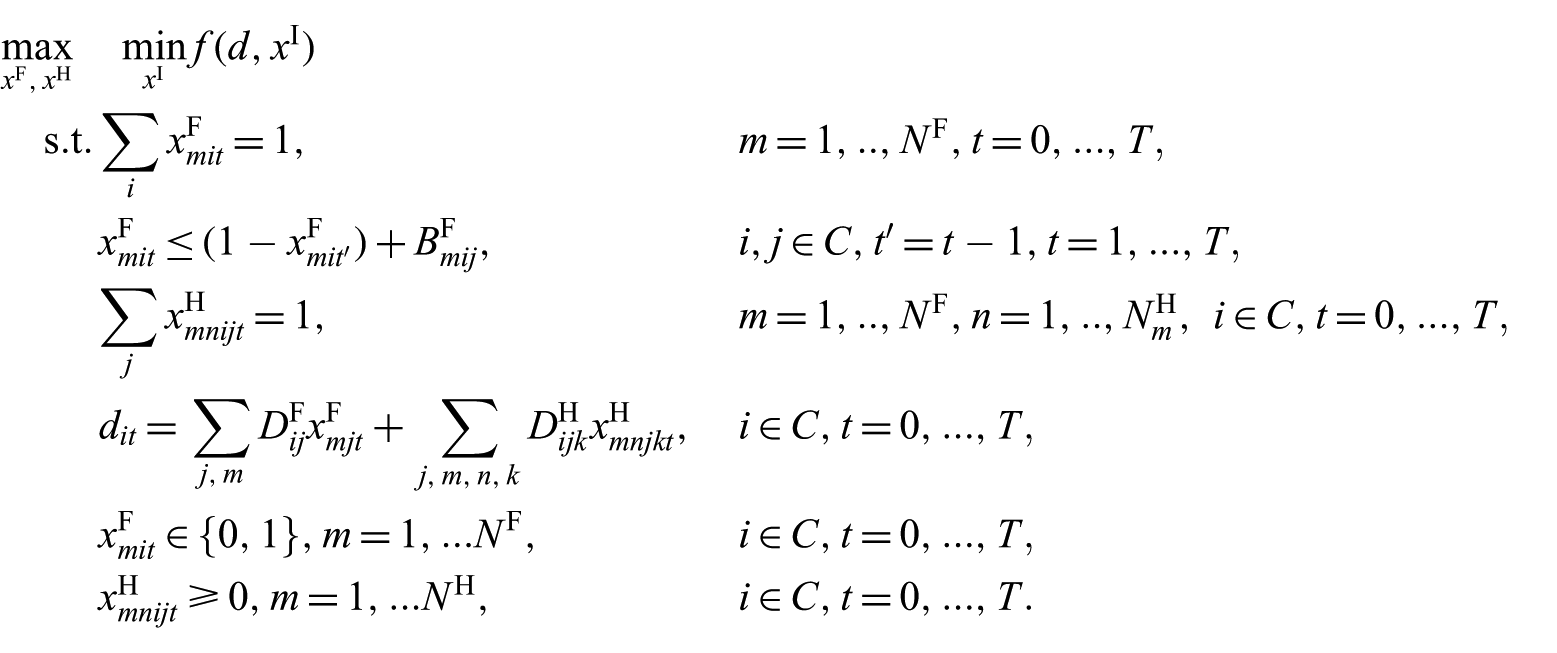
where the first three constraints ensure that each frigate follows a feasible route and each helicopter is scheduled with probability one. With the fourth constraint, the total detection rate for each cell and each time step is calculated.
Intruder’s program
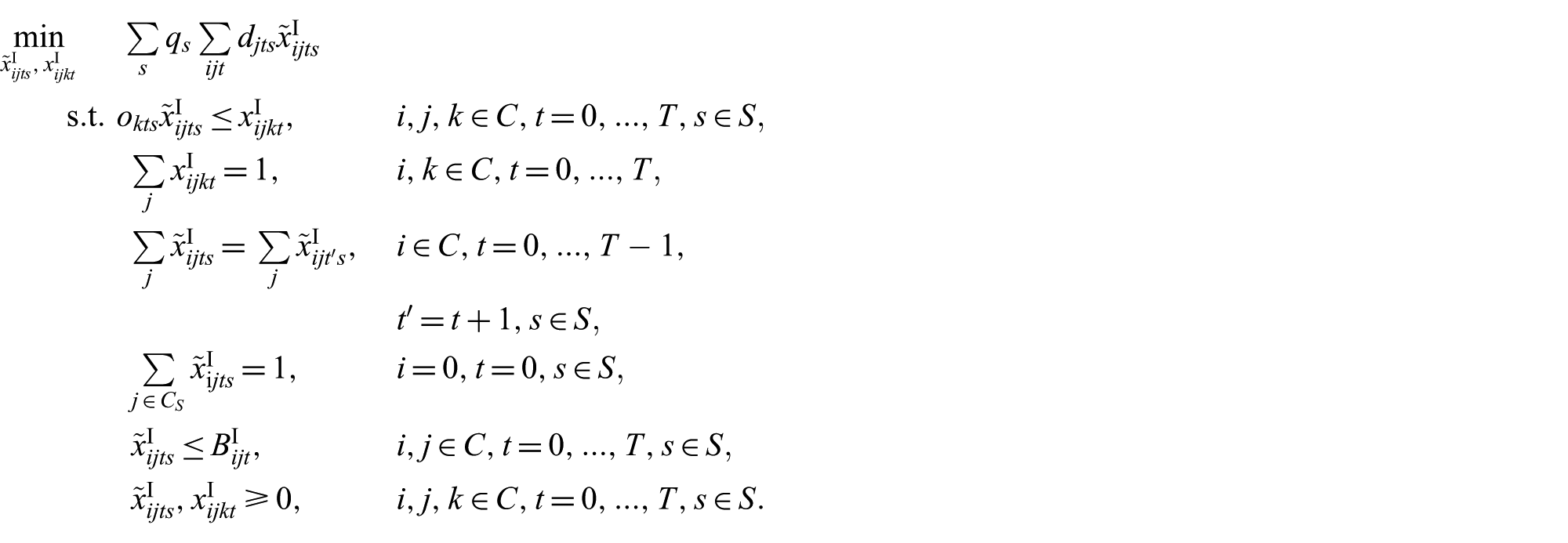
To construct a linear program (LP), we formulate the intruder’s program





The first constraint ensures that the flow into a cell equals the flow out of a cell. The second constraint makes sure that the intruders start at one of the start cells. The third constraint ensures that only allowed routes are chosen by the intruder.
For each combination of
Now consider
To prove that
Complete integer linear program
From Theorem 1, we know that relaxing the integer constraints of












The ILP instance is constructed as follows. Let
Solving this instance of the ILP with the parameters described above gives a solution for the decision of the set-covering problem. If it results in a solution with a value larger than
To overcome the complexity of the ILP and to speed up the solving process, we use a branch and price approach. The branch and price algorithm is a combination of column generation and branch and bound, where the relaxation of the ILP is solved first using column generation, and then branch and bound is applied to create integer solutions.
19
To be able to apply column generation, we introduce fixed routes for the frigate. The variables

If
3. Sequential game approach
In the previous section, we assumed that the frigate’s route is known completely to the intruder at the beginning of the game. In this section we consider the case where the frigate’s position is only known at the beginning of each time step. This game can be modeled as a sequential game, where the intruder decides on his next move at the beginning of each time interval. Since the agent does not get any information about the intruder’s action during the game, he can decide on a complete strategy at the beginning of the game. The intruder’s strategy depends on the movement of the frigate. Therefore, the variable
The agent’s strategy consists of the route for the frigates and the allocation of the helicopters. In contrast to the approach discussed in the previous section, the agent is allowed to randomize over the routes of the frigates. Similar to the column generation method described in the previous section, the agent can choose a route for the frigates out of the set of all possible routes
Since the helicopter’s allocation and detection probability depends on the frigate’s route, the total detection rate
3.1 Intruder’s problem
The intruder’s strategy
The route that is actually executed is
3.2 Complete linear program
By taking the dual of the relaxation of the intruder’s problem, the complete mathematical program to find the agent’s strategy is given by:
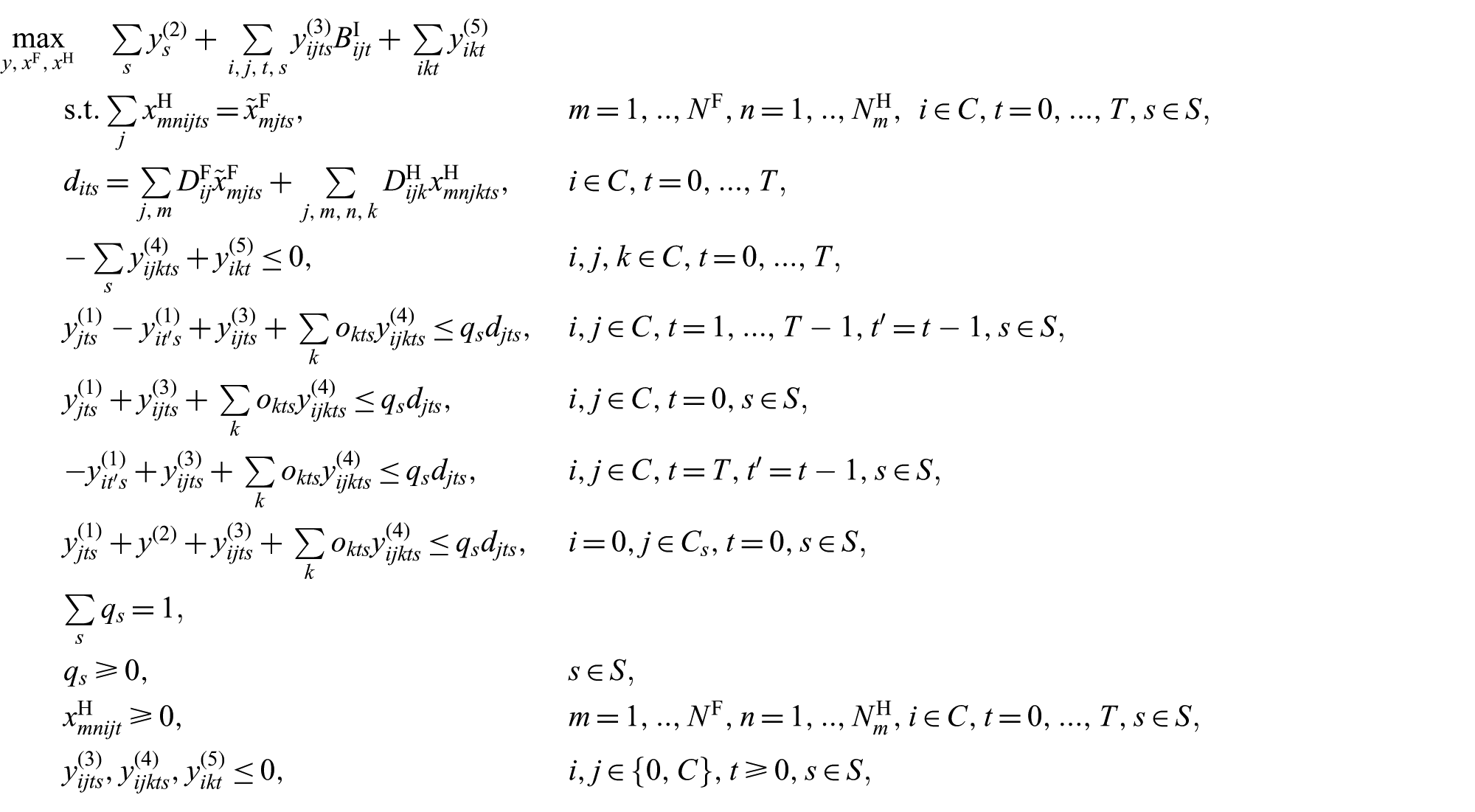
This mathematical problem can be linearized by multiplying the first two constraints with


In the sequential game approach, the probability that a route is chosen,
4. Results
In this section, we evaluate the models introduced in this paper, and we provide results for several instances. First, we consider the model where the complete path of the frigates is known to the intruder. For small instances, we give the optimal agent’s allocation of the frigate(s) and the helicopter(s), and we describe the intruder’s strategy. Since finding the optimal agent’s strategies is NP-hard, we are unable to solve the model for larger instances efficiently. Therefore, we use a branch and price algorithm to approximate optimal solutions and evaluate the quality of this algorithm. Second, we give results for the second method using the sequential game approach. Finally, we compare the results obtained by our models with the TNO UWT simulation. The computational results were obtained using Gurobipy in Python version 2.7.13 on an Intel® Core(TM) i7 CPU, 2.4GHz, with 8 GB of RAM.
4.1 Complete path frigate known
In this section, we evaluate different instances for the game with complete information of the frigate’s location.
4.1.1 Small examples for different asset configurations
We test our model on a small instance for different asset configurations. Consider a game on a 5 × 5 grid and a time horizon
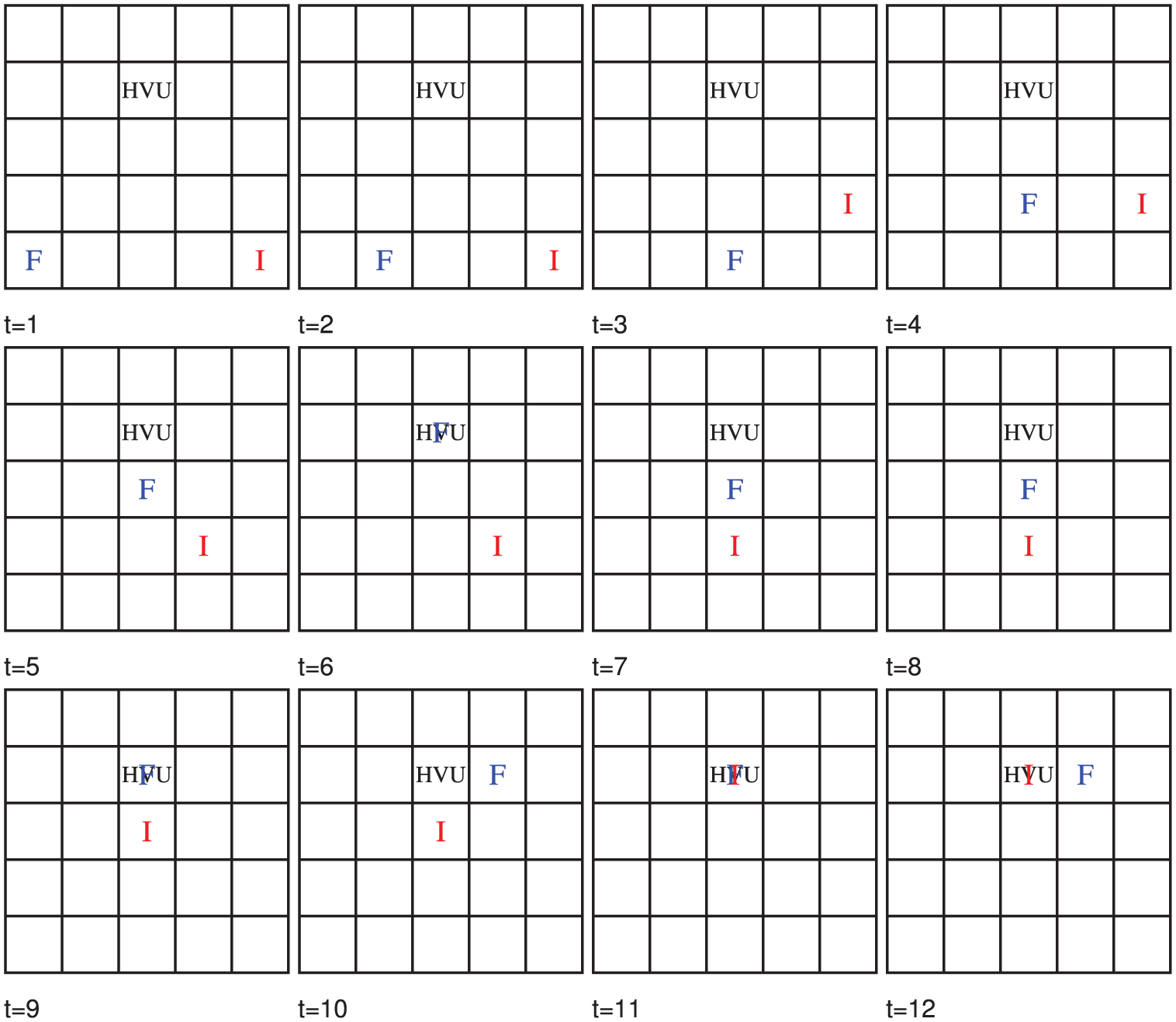
One frigate,0 helicopters.
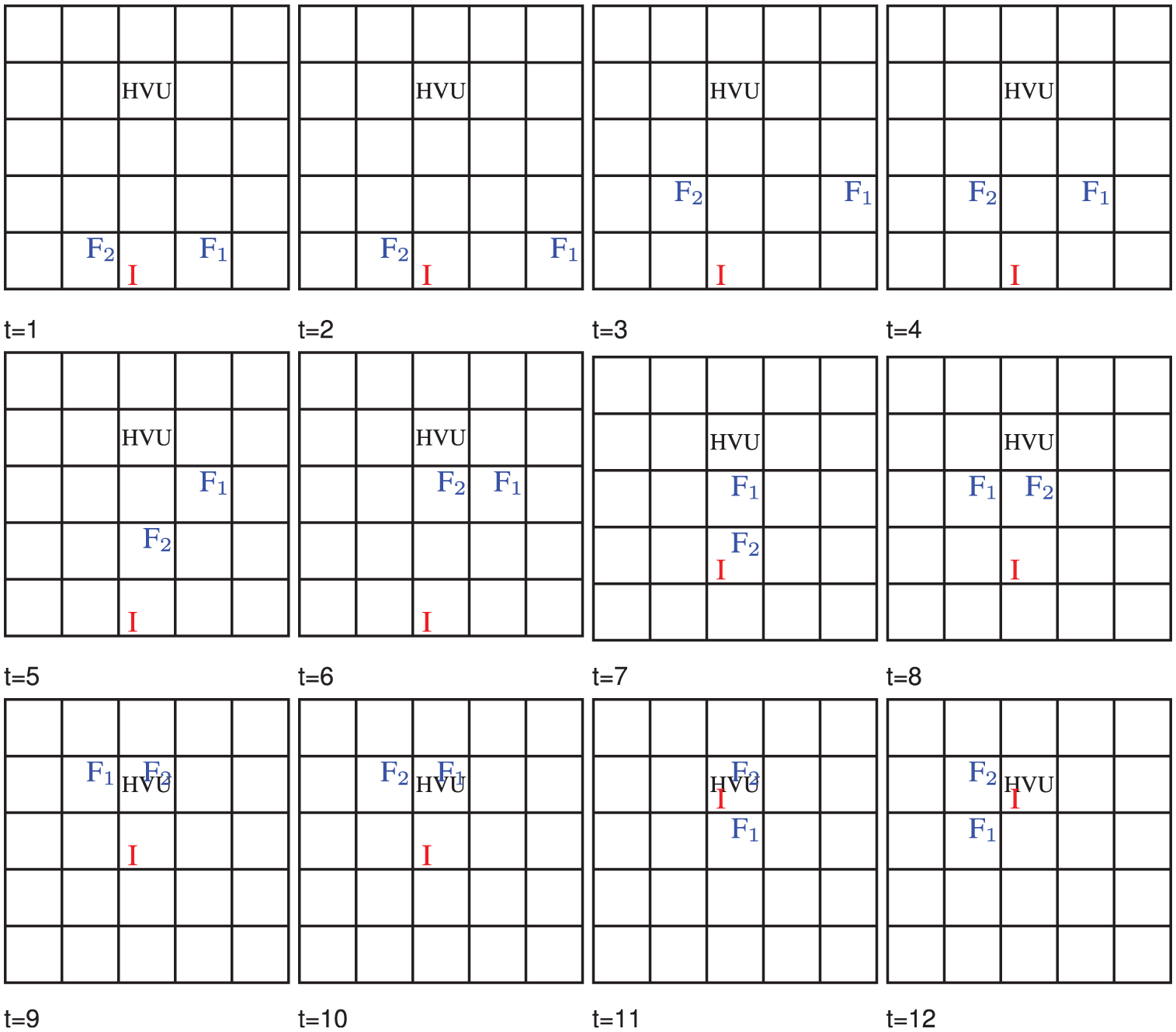
Two frigates,0 helicopters.
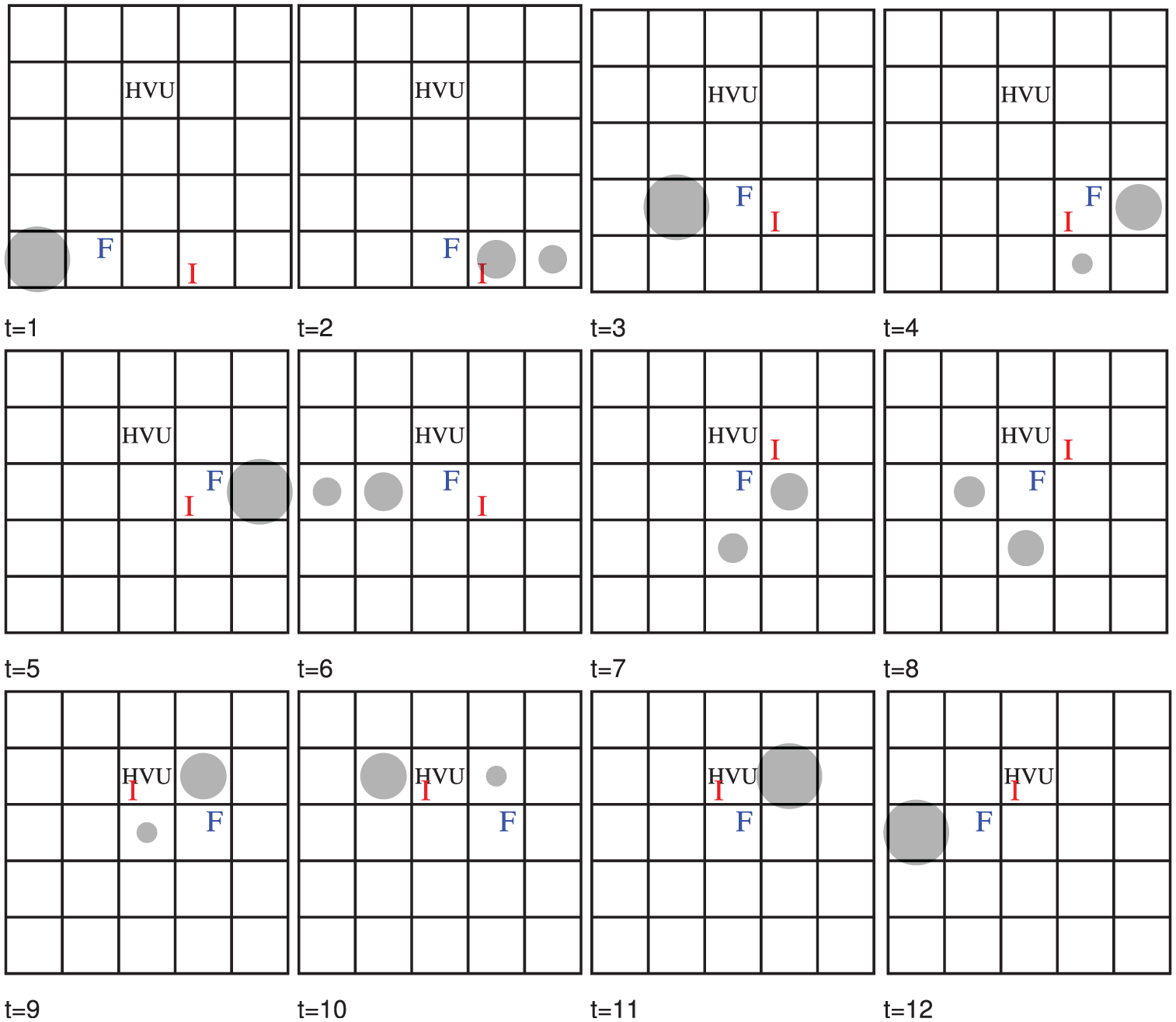
One frigate,1 helicopter.
Results for different asset configurations.
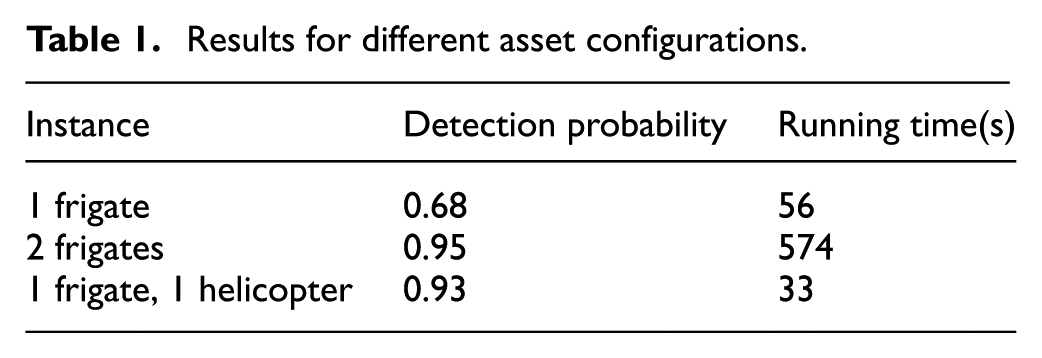
One can see in Figures 1 and 2 that the frigate starts in or near to one of the possible start locations of the intruder and then moves towards the HVU while scanning a large number of cells. Since the intruder can only start at one of the lower cells, it is not possible for the intruder to already attack the HVU at the beginning. Therefore, the agent can use this time to actively search for the intruder; and since the frigate is faster than the intruder, the frigate is able to move towards the HVU before it can be reached by the intruder. As can be expected, two frigates will have a higher detection probability and are able to cover both one side of the area, as can be seen in Figure 2. Also, when an additional helicopter can be deployed (Figure 3), the detection probability will increase. This increase is, however, slightly smaller than when an additional frigate is used, since the frigate is more flexible and has a higher detection probability.
4.1.2 Realistic sized example
We now investigate a larger instance of the ASW model to illustrate a strategy for a moving target. Consider a grid of 7 × 10 with a HVU that is moving over a time window of
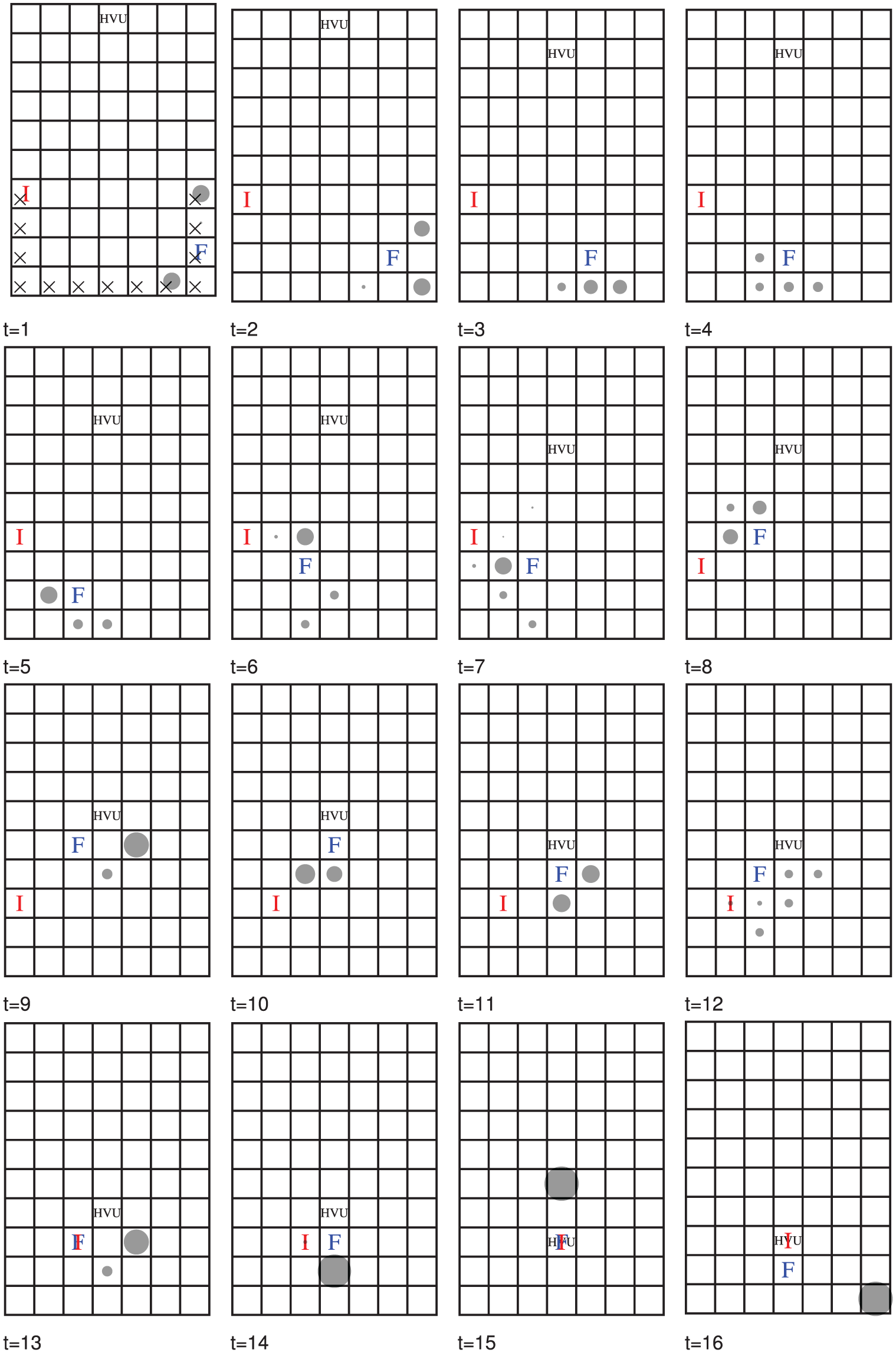
Large instance: 1 frigates,1 helicopter
As the problem is NP-hard (Theorem 2), the running time increases exponentially as the number of cells increases. To solve the instance on a 7 × 10 grid, the running time is more than two weeks. We use a branch and price algorithm to speed up the solving time. With this algorithm, we are able to find an approximate solution with an error of 14.1% within a couple of hours. We have tested the branch and price algorithm for smaller instances, and from these tests it follows that the approximate solutions is always within 15% of the optimal solution and, for several instances, the optimal solution is found. Due, however, to the number of routes and the fact that only one of these routes is used in an optimal solution, it is not possible to always guarantee a high solution quality. For the small examples with different asset configurations considered above, an approximate solution within 14.2%, 3.2%, and 3.1%, respectively, of the optimal solution is found by the branch and price algorithm.
4.2 Sequential game approach
In the second part of this paper, we deviated from the assumption that the intruder has complete information about the position of the frigate during the complete time interval. Therefore, the agent is allowed to randomize over the different frigate’s routes and will be less predictable, resulting in a higher payoff. Since the number of routes exponentially rises following the number of cells, however, the number of variables is large and the LP to find optimal agent’s solutions cannot be solved efficiently. Therefore, we only optimize over a limited set of routes, and we use the column generation approach to determine these routes. Even with a limited number of routes, however, the number of variables is very high because, for each route, we need separate variables for the helicopter’s allocation, detection probability, and the corresponding intruder’s routes.
First, we give a small example to show what the impact of this sequential approach can be. Thereafter, we compare the sequential game approach to the instances with complete information.
In the example above, we described an extreme case where the sequential game approach will lead to a significantly higher detection probability than the game in which complete information of the frigate’s location is considered. We now investigate the impact on a more realistically sized instance.
Consider the small instance on a 5 × 5 grid. We test the same asset configurations, but with the sequential game approach. We use the first 20 routes that are generated using column generation for the model with complete information about the frigate’s location.
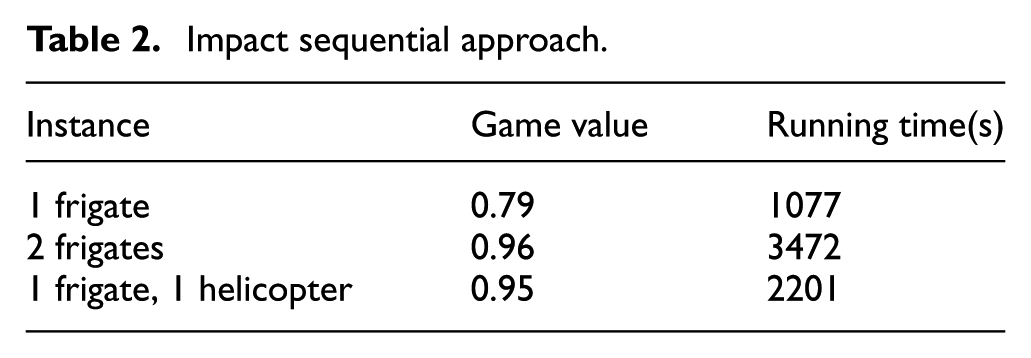
As these results show, the agent’s detection probability increases a lot for the first instance, since the agent can also randomize over the frigate’s position and is therefore less predictable. Since, however, the number of variables is very large as the number of cells increase, the running time increases quickly and we are not able to solve this model for larger instances (see Table 2).
Impact sequential approach.
4.3 Simulation approach
The instance with one frigate and one helicopter was als osimulated in the UWT, to find out whether the optimal path that was found using the game approach has a high effectiveness when used in the simulation model
The UWT is a simulation model developed by TNO. 17 It can be used to develop and evaluate operational tactics and future concepts for underwater operations. In the model, platforms that are part of an underwater operation, such as frigates, helicopters, submarines, mines, torpedoes, and unmanned systems are modeled as agents. They are equipped with sensors, and possibly with separate weapons.
The behavior of the platforms (agent) is modeled in two ways. First, they follow a predefined pattern, e..g., defined by way-points, through the modeled operational area. When an agent detects an opponent, it can react by attacking or avoiding this opponent, or ignoring it. Agents of the same side can coordinate their actions. These reactions are scripted (e.g., reduce speed to
For the detection of a contact, several levels of detail exist. The simplest model uses a cookie-cutter sensor with fixed detection ranges. The sensor detects a contact as soon as it is within range. The most advanced model calculates acoustic propagation through the environment and translates this into a probability of detection. Several intermediate levels of detail are also possible. For the comparison in this paper, it is assumed that a sensor can detect a contact with probability
Typically, the way-points that are followed depend on the tactic that is chosen. Usually, a set of tactics is defined in close cooperation with operational experts, taking into account operational requirements and limitations (e..g., the tactic is not too complicated and can be carried out during an operation). The effectiveness of each tactic is determined with the simulation. The main outcome of a simulation run is whether the defense against the incoming submarine was successful or not. Monte Carlo simulation provides an estimation of the probability of success. The simulation model also produces other results like the ranges at which platforms were detected and by which agents, and the number of possibilities of launching an attack.
It follows that the UWT does not automatically determine the optimal tactic. In practice, the definition of different tactics is the task of the analyst. Using this input, simulations can be executed that will help to determine which of these tactics is the most effective. This analysis may lead to the development of a new set of tactics or advice about the preferred tactic.
For the intruder, two types of behavior are available: a kamikaze-like approach in which the submarine chooses the shortest path towards the HVU, and a cautious approach in which the submarine tries to avoid detection. It must be noted that both types of behavior do not correspond to the optimal path found in the game theoretic approach. Due to time constraints, however, it was decided to use both types of existing behavior in the Monte Carlo simulation.
Detection of contacts in the UWT is modeled by the transmission of sonar pings. Each ping can lead to a detection. The probability of a detection in the UWT depends on the distance between sensor and contact. The grid cells are not modeled explicitly in the UWT, but the speed of the HVU, frigates, and intruders are modeled in such a way that they correspond with the game model. Moreover, the detection rates for the frigate and helicopter are modeled such that they correspond with the game theoretic approach. Since, however, we use a square grid for our model and a detection radius is used in the simulation, they are not exactly the same.
In particular, the behavior of the intruder and the way in which the detection process is modeled will cause a difference in outcome between the game theoretic approach and the simulation with the UWT. Furthermore, tactics are UWT input instead of output. Therefore, the optimal search pattern from the game theoretic models is compared to three other tactics (see also Figure 5):
Frigate in front of the HVU covers the righthand part of the area in front of the HVU; helicopter covers the lefthand part;
Frigate moving from left to right and back in front of the HVU. Helicopter dipping at positions near the frigate;
Frigate in front of the HVU covers the righthand path in front of the HVU; helicopter covers the lefthand part of the area before the HVU.
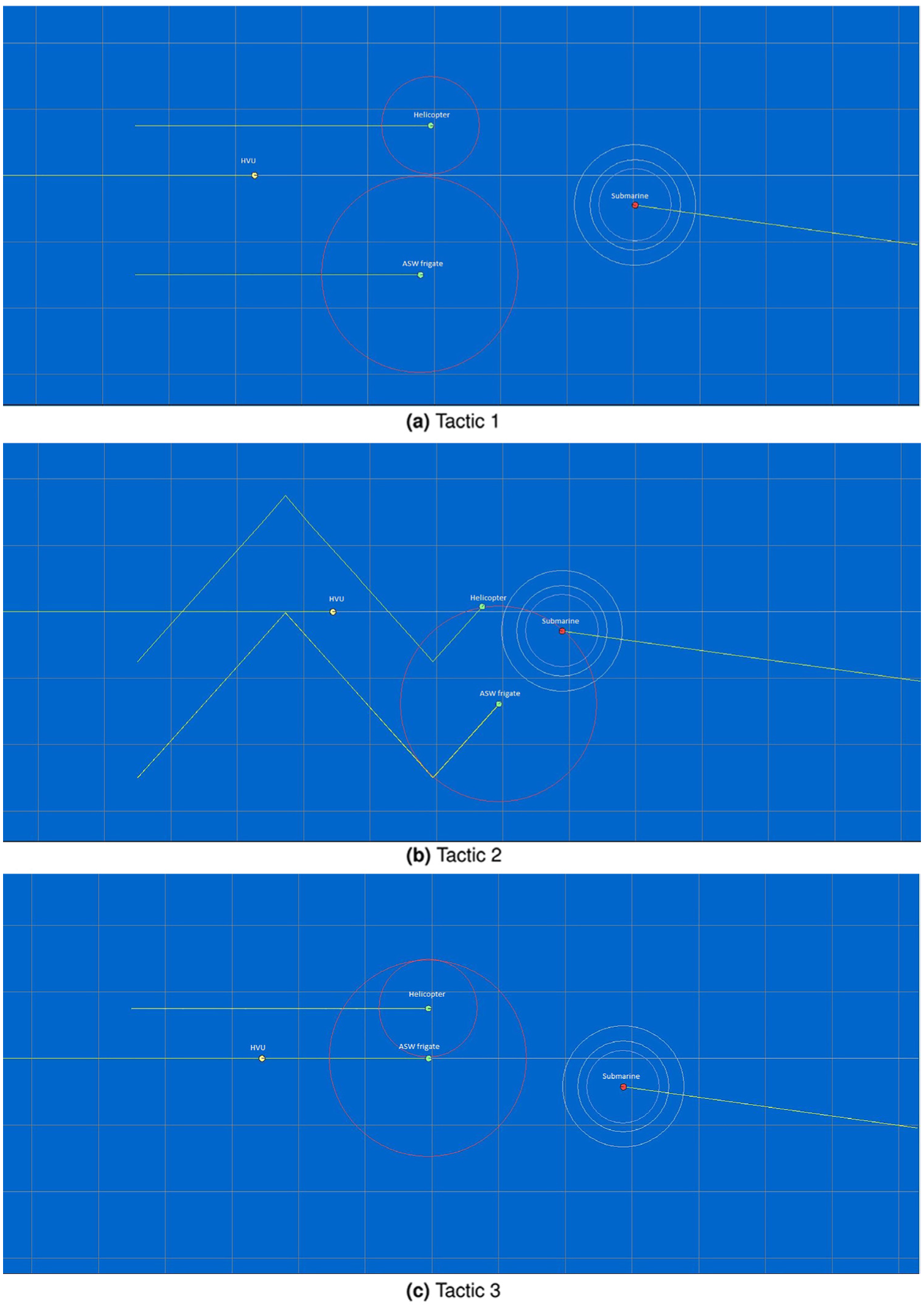
Different agent tactics in the UWT simulation
4.4 Comparison of approaches
For the simulation, we used 55 different intruder starting positions to account for the uncertainty in where the submarine starts its attack. For each starting point, we simulated 25 runs. The average agent’s detection probability for the two intruder tactics and four agent’s tactics are given in Table 3.
Impact sequential approach.
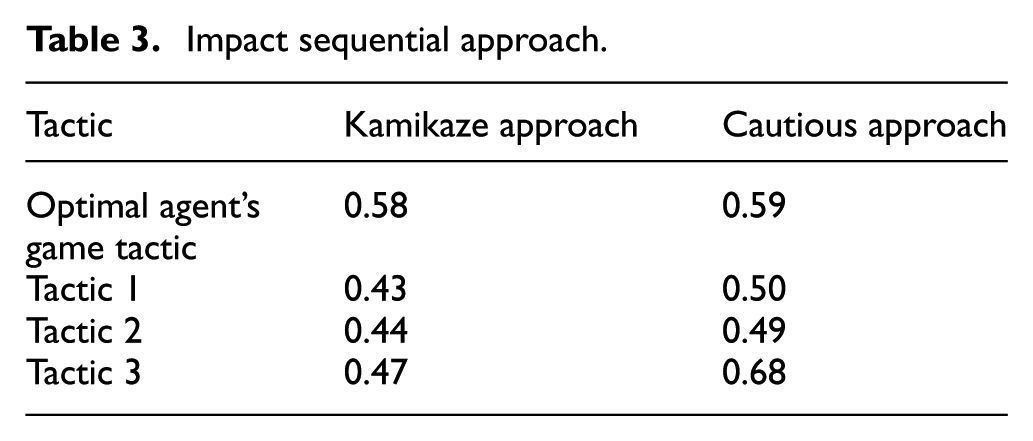
Because of the modeling aspects mentioned above, it is likely that the performance determined by the simulation differs from the performance of the optimal tactic as determined by the sequential game approach. Therefore, it is more useful to look at the difference in performance between the selected tactics. It can be observed that the optimal tactic of the game approach performs in most cases better than the alternative tactics 1 and 2. Tactic 3 performs slightly better for the cautious intruder.
An advantage of using the game theory approach is that the analyst does not have to define tactics in advance. Regarding the approach for selecting tactics, it is very likely that the analyst limits himself to tactics that are already well-known or widely accepted. The game theory approach can come up with unconventional alternatives that might be difficult to carry out in practice, but may lead to innovating ideas about new tactics. For example, the optimal tactic from the game theory approach shows that it is advantageous to deploy the frigate andthe helicopter far upfront if it is known that the submarine did not have time to approach the HVU. This enables early detection and warning. Later in the scenario, the submarine could have come close to the HVU, and the frigate and helicopter need to be closer to the HVU to cover the area around the HVU to prevent an attack on the HVU.
5. Conclusions
In this paper, we have introduced a new model for the protection of large areas against enemy submarines. In this model, we address several limitations of current models that are proposed for anti-submarine warfare operations. By introducing a time aspect, we extend the model of Brown et al. 9 and Monsuur et al. 12 such that time-dependent strategies and moving HVUs can also be modeled. Moreover, by using a game theoretic approach, our model is able to model an intelligent intruder.
For modeling an ASW transit operation with time-dependent strategies, we have proposed two different approaches: one with complete information about the frigate’s location for the complete time interval, and one sequential game approach where the intruder only becomes aware of the frigate’s location during each time interval. The sequential game approach gives higher solution quality for the agent, since the agent has the possibility to randomize over frigate routes. Since, however, for every possible route a helicopter’s strategy has to be specified, the number of variables is very large and we are unable to solve realistically sized instances. Future research include investigating methods to solve large instances efficiently.
For the approach with complete information about the frigate’s location, we are able to solve larger instances and compare these with the UWT simulation. It should be noted that since, in the UWT approach, more parameters and features can be modeled than with our game models, the exact outcomes are difficult to compare. We can, however, compare the relative performance of the agent’s strategies for both models. Furthermore, the running time of our model increases according to the number of cells. We have used a branch and price algorithm to overcome the complexity, which generates solutions within 15% of the optimal solution. For future research, it would be interesting to improve the approximation algorithms, for example by using cutting planes. In the current approach we allow for all possible routes, but routes that will never be used, for example when they will not cross the intruder’s path, can be excluded in advance.
An advantage of our game approach compared with the UWT is that we do not have to specify the agent’s tactics in advance and can model the intruder as an intelligent adversary. Therefore, our game approach is not limited to the usual tactics and can generate unconventional ones. This is of added value when evaluating new tactics, as it triggers military analysts to consider other modus operandi. Moreover, simulating the optimal strategy from the game theoretic approach with complete information in the UWT shows that the detection probability is higher than when standard tactics are used. With our game approach we are therefore able to generate agents’ routes that may serve as a starting point for the development of new tactics and their further evaluation using simulation.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.