
Abstract
In the multi-ring braiding equipment, gear transmission system is an extremely important part, its operation process will be affected by a variety of factors. Considering the influence of contact temperature on the dynamic behavior of the gear transmission system, a mathematical model of the gear system is established in order to observe the nonlinear characteristics of the system. And the bifurcation diagrams, the maximum Lyapunov exponents diagrams, phase diagrams, Poincaré mapping diagrams, and the power spectrum diagrams are analyzed. Using the final iteration results to study the nonlinear characteristics of the gear system and the model is evaluated to show the key regions of sensitivity. The results show that
Introduction
With the rapid development of technology, new material manufacturing technologies have become a focus of attention in various fields. Meanwhile, three-dimensional braiding technology has been widely applied in many industries due to its unique advantages. However, despite the potential of this technology, it still faces many challenges in practical applications, including research on new composite materials, optimization of structural design, and the control of braiding process.
Stig et al. 1 studied fully interlaced 3D fabrics composed of carbon fibers and tested the mechanical properties such as tensile and compressive strength of this new composite material. Zhang et al. 2 conducted tests on three-dimensional braided composite materials and traditional two-dimensional composite materials. The results show that three-dimensional braided composite materials with eight different braiding structures have excellent mechanical properties. Liu 3 et al designed a new braiding technology based on a self-made braiding machine, an improved sleeve positioning system. Based on this system, the influence of the braiding structure of three-dimensional braided reinforced composite materials on the bending performance and failure mode of three-dimensional fabrics were been studied. Gereke et al. 4 designed mathematical models with different metrics to study the relationship between the structure of braided fabrics and the mechanical properties of materials. Based on the three-dimensional braided composite fabric model, the results obtained through parameterization research were discussed. Zhao 5 et al measured the thermal conductivity of braided composite materials using the transient hot-wire method. The research results indicate that the thermal conductivity of three-dimensional braided composite materials is influenced by braiding parameters such as fabric structure and fiber volume fraction. Dahale 6 et al investigated the effect of truncation density (braiding parameters) on the mechanical properties such as tension and compression of three-dimensional braided composite structures.
The stability control of the braiding process in a 3D braiding machine is crucial for determining whether the mechanical properties of 3D braided composite components have changed. During this process, various internal and external incentive factors will more or less affect the stability of braiding. Bigaud et al 7 investigated the effects of yarn to yarn interactions and consolidation parameters during the braiding process on the stiffness and strength properties of composite materials.
The vibration situation of the gear system is also extremely important for the three-dimensional braiding process. Gan et al 8 analyzed the gear transmission error and vibration of the head structure of the bevel gear transmission system in a large horizontal three-dimensional braiding equipment, meanwhile, finite element, modal, and response analyses were conducted after modeling.
The gear transmission system is an important part of the braiding process in various braiding machines, and the study of gear dynamics originated in earlier studies. In the 1950s, Tuplin 9 established a mass-spring model and proposed the concept of a gear dynamics model. Nonlinear factors, such as tooth profile error and time-varying mesh stiffness, are gradually being applied to the modeling of gear system dynamics. Howard 10 used a finite element analysis method and combined it with the variation in gear torsional meshing stiffness to introduce a simplified gear dynamics model in detail. This provides ideas for the establishment and innovation of subsequent gear-dynamics models. Jiang Chunlei 11 established an equivalent contact model and a calculation model for the meshing stiffness of double involute gears, and studied the influence of tooth surface wear on the dynamic characteristics of double involute gears. Li 12 proposed a lubrication and friction dynamics model to fully couple the frictional and dynamic behaviors of spur gear pairs. Chen 13 proposed a spur gear dynamic model in which the deformation of a single tooth was considered, and a comparative verification was conducted. Dadon 14 proposed a gear dynamics model that can be solved numerically by combining the most advanced gear modeling methods. Margielewicz 15 established a gear simulation model considering the time-varying stiffness and clearance of meshing, and bifurcation diagrams, Lyapunov exponents, amplitude frequency distributions, and Poincaré diagrams were obtained. Yang 16 used the principle of motion synthesis to establish a gear dynamics model under variable load excitation, and derived a motion differential equation to obtain the influence of time-varying stiffness on response frequency and vibration. Chen 17 studied the first pair of gears in the gear transmission system of a coal mining machine, considered the coupling effect of multiple excitations under thermal deformation, andestablished a nonlinear dynamic model of a gear system with three degrees of freedom . Liu 18 studied the dynamic response characteristics of spur gear systems, including lateral and torsional responses, which combine various internal and external coupling excitations, such as power, gear eccentricity, and backlash. Chen 19 established a nonlinear dynamic model of a gear system considering time-varying stiffness and backlash and solved it using numerical methods. Through the result analysis, the dynamic characteristics of gear vibration displacement and dynamic meshing force were obtained. Bruzzone 20 analyzed the excitation sources in cylindrical gears, such as fatigue wear, noise vibration, and frictional lubrication, and discussed various dynamic models. Zhou 21 comprehensively considered nonlinear characteristics such as time-varying mesh stiffness, backlash, and transmission error, and established a nonlinear coupled dynamic model of a gear-rotor-bearing transmission system. The analysis results are helpful for the design and research of gear systems.
In summary, there is no mention of factors such as contact temperature, which also has a significant impact on the dynamic behavior of the gear system in the braiding machine and cannot be ignored. The effect of contact temperature was considered, and a mathematical model of the gear transmission system was established in this study. The analysis results have important research significance for establishing a dynamic model to improve braiding quality.
Dynamic modeling
Braiding process
A mathematical model of the gear system were established considering the contact temperature to study the nonlinear characteristics of the gear system. Using bifurcation diagrams, maximum Lyapunov exponent diagrams, phase diagrams, Poincaré mapping diagrams, and power spectra diagrams, the nonlinear characteristics of the gear system considering the contact temperature were studied. The numerical results indicated that factors such as temperature have a significant impact on the nonlinear characteristics of the braiding equipment, and the model was evaluated. The analysis of relevant parameters is helpful for the design and control of braiding equipment.
The multi-ring braiding equipment transmits motion by continuous meshing gears, and the braiding chassis of the multi-ring braiding equipment is partially shown in Figure 1. Consider a pair of gears in multi-ring braiding equipment for research, and the meshing situation of the other gears is the same. When the spindle of the multi-ring braiding equipment is The diagram of the braiding chassis in multi-ring braiding equipment.
Dynamic modeling of the gear system
To obtain the dynamic equation of the gear system, the schematic diagram of the gear system dynamic model is established as shown in Figure 2. From Figure 2, p represents the driving gear and g represents the passive gear; the subscript p represents the variable of the driving gear and g represents the variable of the passive gear; The schematic diagram of gear system dynamic model.
According to Newton’s law, the dynamic equation of the gear system in braiding equipment considering internal excitation and temperature factors is established as

In equation (1),



After the Fourier series is expanded, take the first order components of


In equations (3) and (4),





For convenience in solving, a dimensionless transformation is made:

For ease in programming, a variable substitution is made:











Results and discussion
Using iterative method to solve equations (8)–(17). According to the step
Initial conditions:
Analysis of gear systems without disturbance
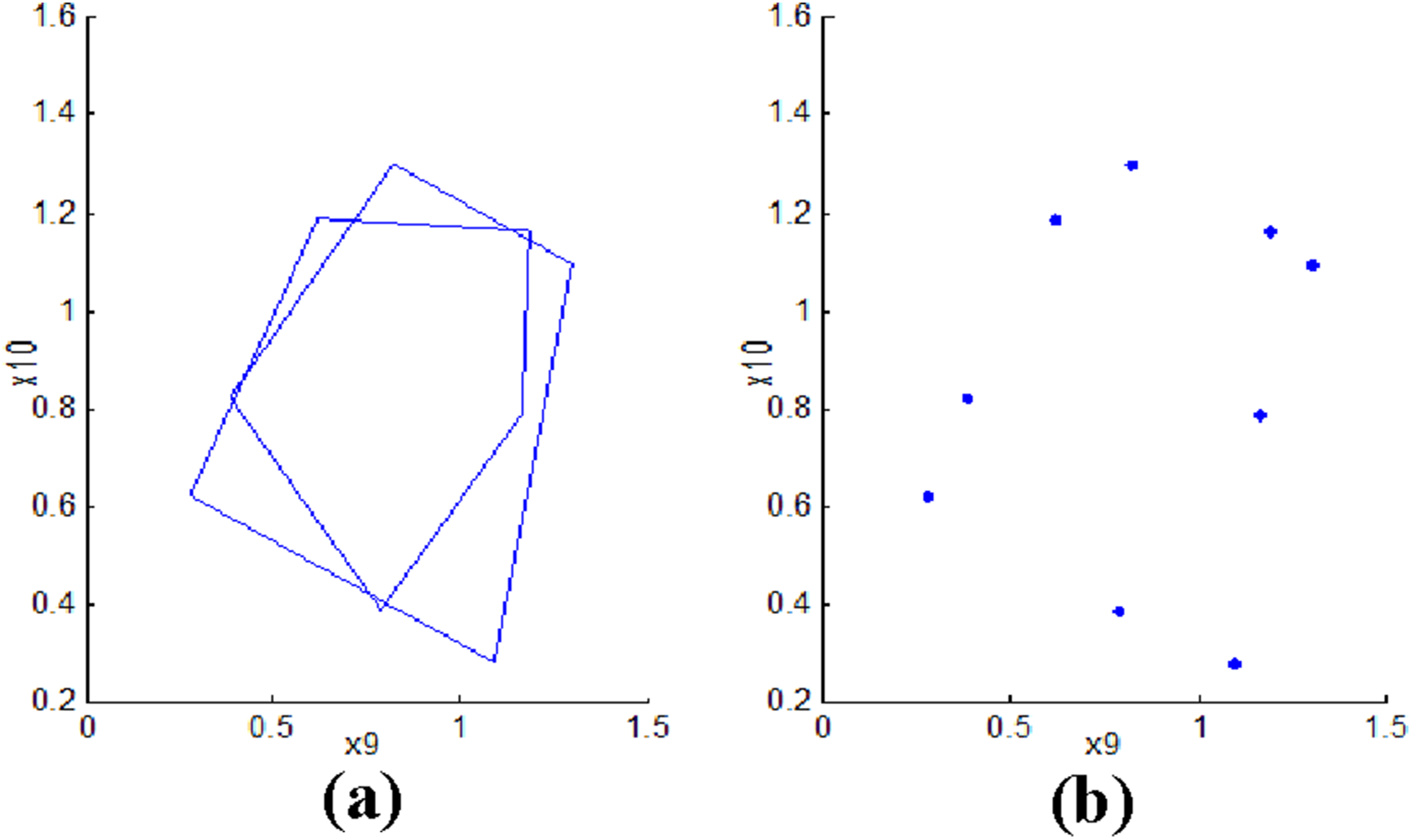
The vibration bifurcation diagram of the gear transmission system for braiding equipment without disturbance is shown in Figure 3(a), the maximum Lyapunov exponent diagram of the system is shown in Figure 3(b), and the Poincaré mapping diagram and corresponding phase trajectories of the system are shown in Figure 4∼9. The vibration response curve of the gear pair. (a) The vibration bifurcation diagram (b). The maximum Lyapunov exponent diagram. The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of 
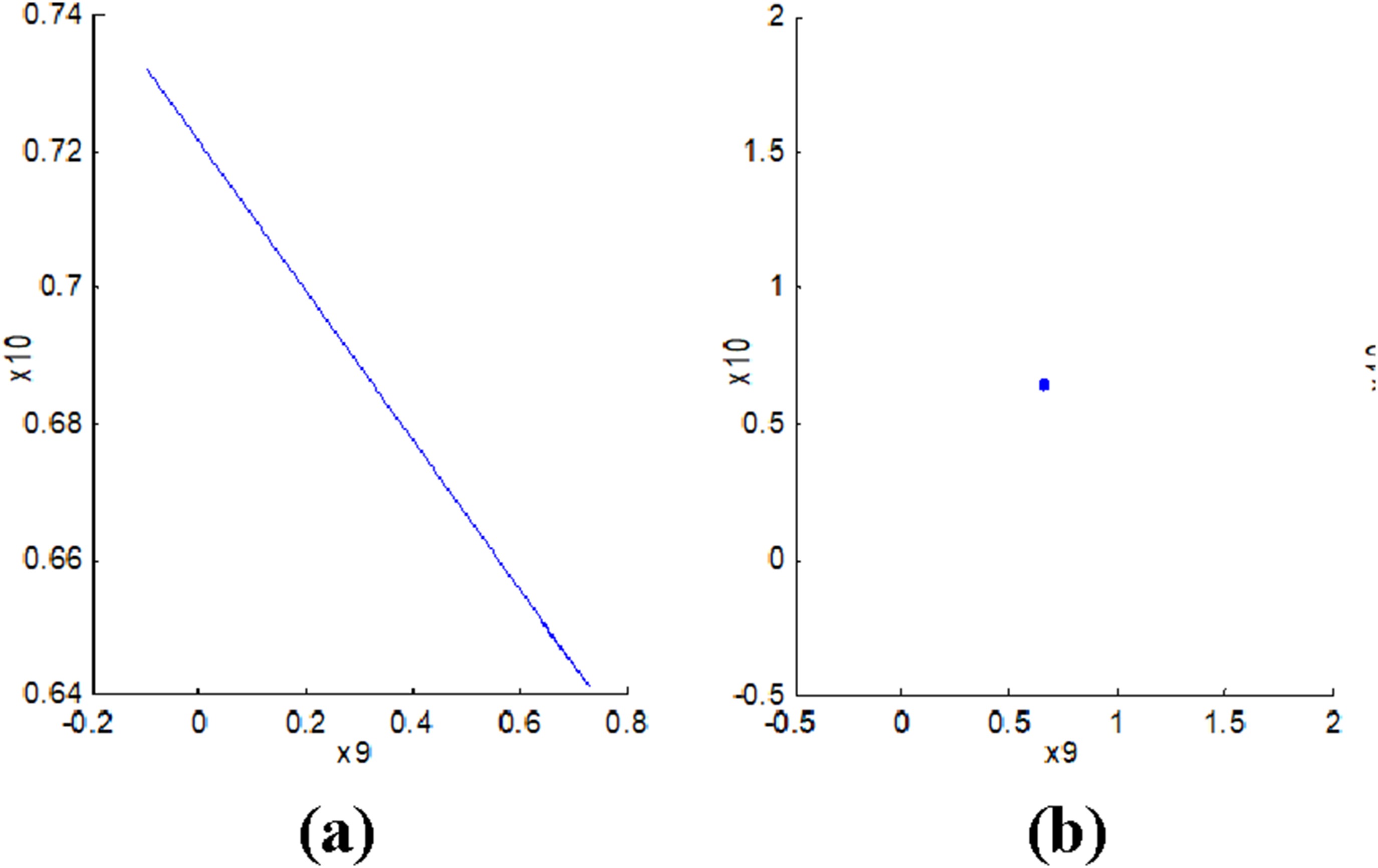





The nonlinear vibration characteristics of the system and the relationship are shown in Figure 3(a). It can be seen that the system had a periodic point when
As shown in Figure 3(b), the maximum Lyapunov exponent is less than zero or fluctuates around zero when. According to the Lyapunov theorem, it indicates that the system is stable; The maximum
Analysis of gear systems considering temperature factors
Analysis of system bifurcation and chaotic behavior
The nonlinear characteristics of the gear transmission system in the braiding machine under the consideration of The vibration response curve of the gear pair under temperature excitation. (a) The vibration bifurcation diagram considering The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The phase trajectory and Poincaré mapping diagram of The vibration response curve of the gear pair under temperature excitation. (a) The vibration bifurcation diagram considering 






From Figure 10(a) and 17(a), it can be seen that
If
If
Analysis of inherent characteristics of the system
The contact temperature of the tooth surface

According to Blok’s flash temperature theory,
22
the flash temperature of the tooth surface

In equation (19), the interpretation of each parameter is based on the Blok flash temperature theory.
According to equation (19), the trend chart of tooth surface flash temperature variation with meshing point is shown in Figure 18, and maximum flash temperature of tooth surface under coupling of load and frequency is shown in Figure 19. The trend chart of tooth surface flash temperature variation with meshing point. The maximum flash temperature of tooth surface under coupling of load and frequency.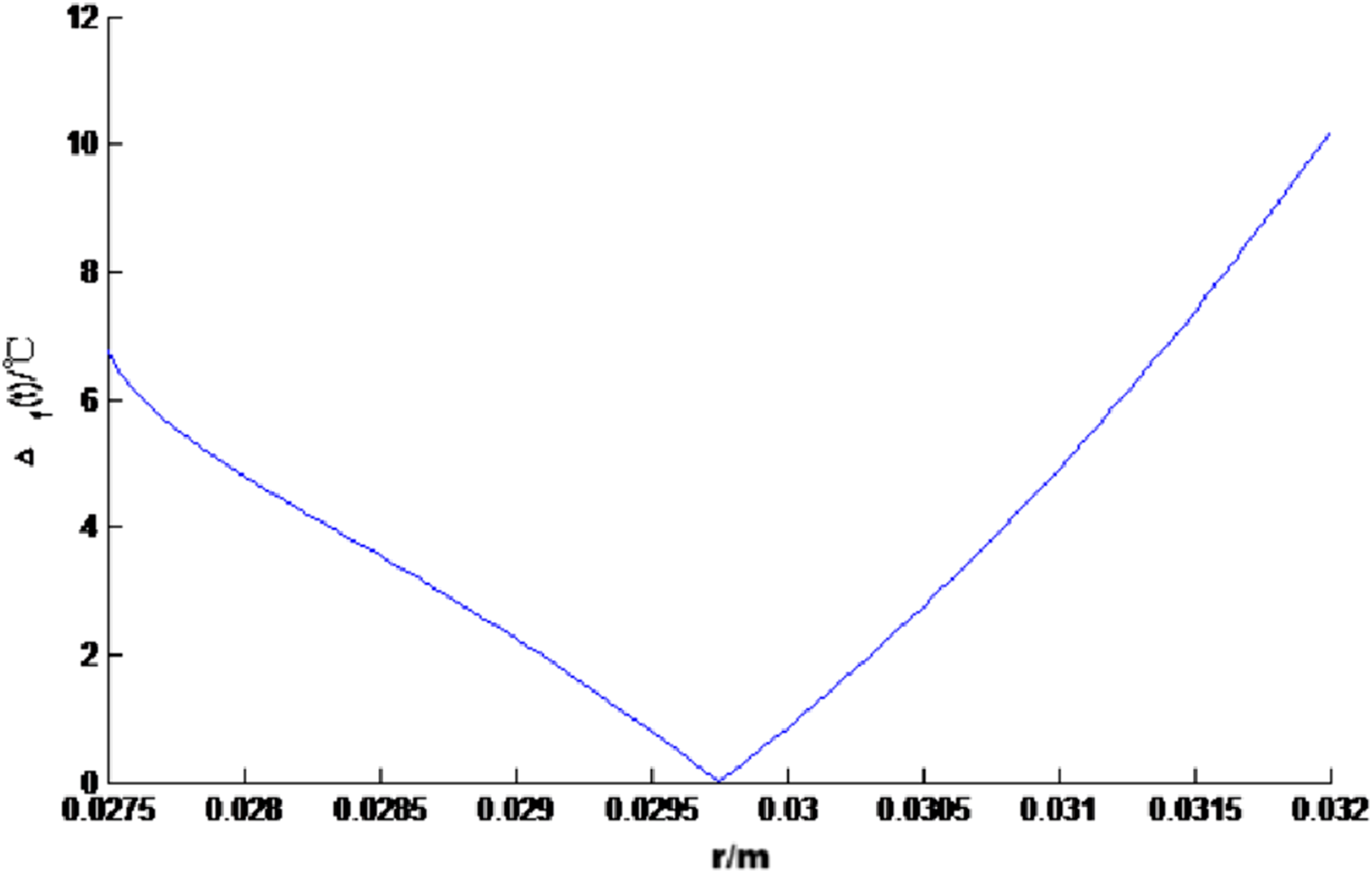

From Figure 18, it can be observed that the flash temperature of the tooth surface is the smallest at the node, and the value is the highest when the tooth top enters meshing and the tooth root exits meshing. From Figure 19, it can be seen that the vertical axis represents the load change, and the load Fn = 5000–5800N was selected. The horizontal axis represents the frequency change, and the frequency range was (120,280). Different colors represent the maximum flash temperature of the corresponding tooth surface. From Figure 19, it can be observed that as the load and frequency increase, the maximum flash temperature of the tooth surfaces also increases during gear meshing.
Frequency and load affect the flash temperature of the tooth surface. The contact temperature of the tooth surface is equal to the flash temperature of the tooth surface and body temperature. The change in contact temperature causes a change in the amplitude of the stiffness fluctuation k w , which leads to a change in the amplitude of vibration. At the same time, the change in body temperature T has a small impact on the amplitude of vibration; that is, the flash temperature on the tooth surface causes a change in the amplitude of vibration.
The relationship between the system amplitude on the frequency w-body temperature T parameter plane at k
w
= 0.1, k
w
= 0.2, k
w
= 0.3 is shown in Figures 20–22. From Figures 20–22, it can be seen that the amplitude response of the system is strong when Cloud image with amplitude on the w-T plane at k
w
= 0.1. Cloud image with amplitude on the w-T plane at k
w
= 0.2. Cloud image with amplitude on the w-T plane at k
w
= 0.3.


Conclusions
This section investigates the nonlinear characteristics of the gear transmission system in braiding equipment under various influencing factors. The results indicate that the nonlinear characteristics of the gear transmission system under various influencing factors conform to engineering practice. The main conclusions are summarized as follows: (1) According to the bifurcation diagram of the system without random disturbances, chaos occurs when (2) Considering the bifurcation of the system due to (3) If
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was supported by the Applied Basic Research Programs of Changzhou (grant number CJ20235047), Major Program of Natural Science Research in Higher Education Institutions in Jiangsu Province (grant no. 21KJA460004), the China Postdoctoral Science Foundation [2023M740554] and Key Project of Shaoxing University [13011001005/132].