
Abstract
This paper investigates the illuminance needed to detect trip hazards for pedestrians walking after dark. In previous work, it was assumed that the critical obstacle height is 25 mm: further review of accident data and foot clearance data suggests instead that 10 mm is the critical height. Eye tracking records suggest a tendency for obstacles to be detected approximately 3.4 m ahead. Interpretation of obstacle detection data suggests horizontal photopic illuminances of up to 0.9 lux are required for peripheral detection of a 10 mm obstacle 3.4 m ahead, according to the scotopic/photopic ratio of the lighting and the age of the observer.
1. Introduction
This paper concerns pedestrians and their ability to detect obstacles that might otherwise lead to injury from a fall. An obstacle is defined here as a variation in elevation between adjacent surfaces on the footpath; such hazards are responsible for the majority of non-vehicular pedestrian accidents. 1 This variation may be an increase in height (ascent) such as a raised paving slab or a decrease in height (descent) such as a pothole. A fall is likely to occur if this variation is unexpected and the subsequent misplacement of the foot causes the pedestrian to lose balance to an extent they are not able to recover. This misplacement may be the foot unexpectedly striking a surface or the absence of an expected surface.
Falls on public footpaths are a significant problem in terms of the number of cases, the severity of the resulting injury, and the national cost.1–4 A survey of postal delivery workers in the United Kingdom’s Royal Mail, a section of society regularly exposed to walking hazards, found that 86% listed damaged walking surfaces and large obstacles as a major factor in accident risk. 2 In 2002, the annual number of falls on public footpaths requiring admission to the accident and emergency unit of a hospital in England and Wales was estimated to lie between 20,000 and 190,000. 3 The average economic cost (2007 data) of a tripping accident on a footway was estimated 3 to be £6,046 and thus falls on public footpaths represent an annual cost to England and Wales of up to £1.2 billion. This is not a problem only within the United Kingdom. A survey in New Zealand found that around 700 pedestrians were admitted to hospital each year as a result of slips, trips and stumbles in the road environment. 1 These data are recorded in New Zealand because their no-fault, state-owned injury compensation and rehabilitation provider keeps records of pedestrian injury claims. Of these, it was found that most injuries occurred on the roadside in residential areas, with vertical changes due to uneven construction being the most commonly reported hazard type in roadside pedestrian accidents. Footpath condition is a common concern that may prevent people from choosing to walk. 5
While walking is the most common physical activity of older people it exposes the walker to increased risk of accident and falling.
6
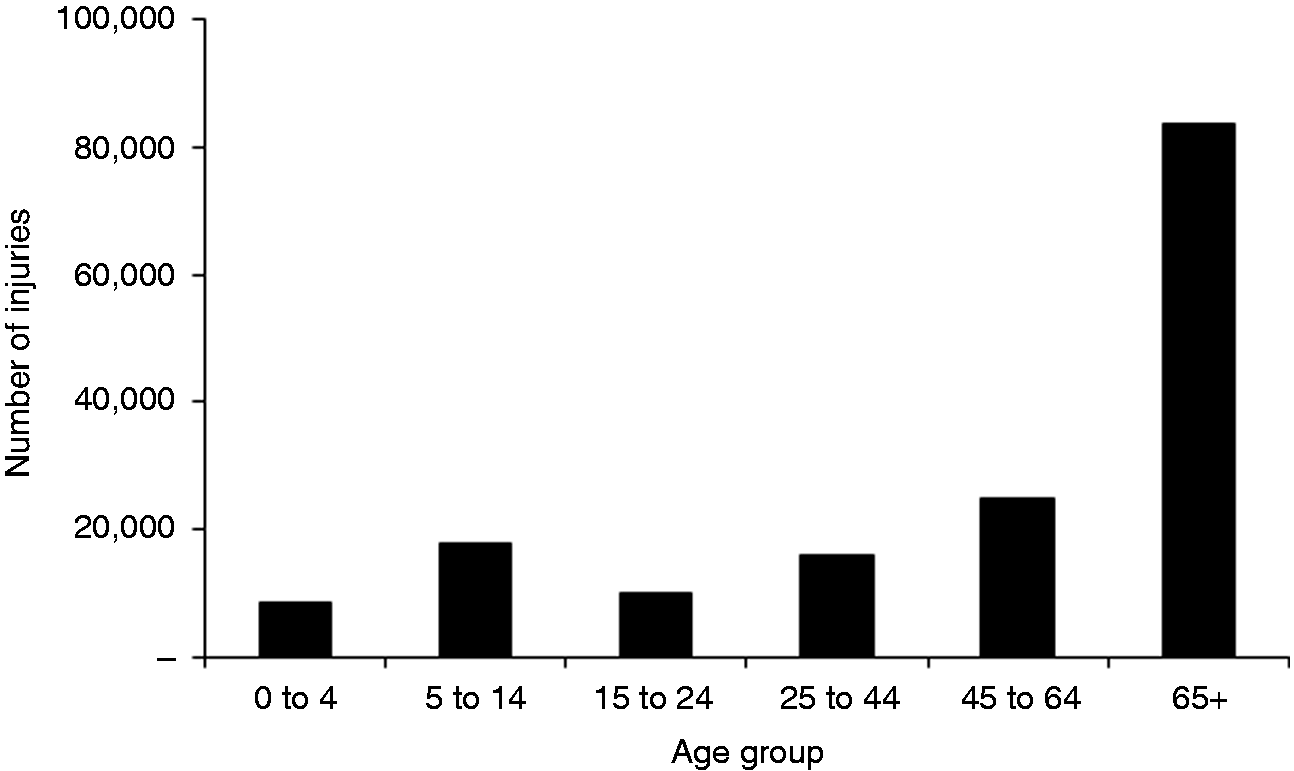
Reaction time decreases with age, and hence elderly people are less able to recover their balance in sufficient time after an accidental foot misplacement. Hospitalisation data from Australia (Figure 1) shows the elderly (>65 years) are much more frequently injured due to a fall then younger people.
7
A survey of claims made against three UK local authorities (1998–2002) found that more than half were associated with pedestrians aged over 60 years.
3
When these data are weighted by distance walked, then it is clear that the elderly have a higher risk of falls than younger people. Compared with other non-self-inflicted causes of injury (i.e. fire, poisoning, drowning, road traffic) falls are by far the greatest cause of fatal injuries among older people (60+ years) in the EU.
8
Elderly falling is a major cause of disabilities in later life, and the reduced outdoor activity associated with a fall, or with fear of falling, reduces the benefits of health and social interaction.
9
The elderly are apparently aware of this risk: a survey of residents in two Danish cities found that smooth pavement surfaces were particularly critical factors in route choice when walking for their elderly group (>70 years old) while for the younger group (40–49 years old) a fast, direct route was more important.
10
A study in Australia also revealed a perception that uneven footpaths are hazardous for the elderly and can prevent walking.
11
Injuries caused by tripping when walking on footpaths, Australia 2009–2010 according to age
7
A person is likely to trip and fall if they fail to notice an obstacle, if they have insufficient foot clearance, and if they fail to regain balance before falling. 3 Road lighting may contribute to alleviating the first of these after dark by improving ability to detect and identify approaching obstacles in sufficient time to make changes to gait. Indeed, inadequate or poor lighting has been listed as a contributory factor in investigations of falls2,4,12 and improving obstacle detection is one of the aims of road lighting on subsidiary roads such as those in residential areas.13,14
Early lighting guidance was provided by Caminada and van Bommel 14 and they used data for emergency lighting as the basis of their recommendation for the detection of obstacles. They suggested illuminances in the range of 0.2 to 1.0 lux, these being taken from a draft CIE report. Confirmation is available from Boyce 15 who comments also on the uncertainty of origin of the values. In an experiment investigating time and manner to walk an unfamiliar escape route it was found that at 0.2 lux there was difficulty in moving quickly and without hesitation, but at 1.0 lux there was no difficulty in moving smoothly and at a speed of movement similar to that under the normal room lighting (580 lux on the floor). 15 Therefore 0.2 lux was presented as an absolute minimum, with 1.0 lux suggested to be more ideal.
Thies et al. 16 examined gait characteristics (step width variability, step time and step time variability) when walking along flat and bumpy surfaces (prisms placed underneath a carpet) and they found no effect for the two light levels considered, 47 lux and 927 lux. These illuminances are higher than that likely to be encountered on pedestrian footpaths (e.g. the CIE 17 recommends average illuminances in the range 2.0–15 lux) and according to the results from Boyce 15 these may already lie on the plateau of performance.
Studies have been carried out to investigate the effect of changes in lighting on the detection of peripheral obstacles.18–20 Two approaches were used to interpret these data. 19 The first approach was to identify the transition between the escarpment and plateau regions of the performance versus illuminance graph: higher illuminances bring negligible improvement in performance but lower illuminances result in a rapid decline in performance. These results suggested a transition at approximately 2.0 lux. It was found that observer age and light source scotopic/photopic (S/P) ratio affected detection only at the lowest illuminance used in those experiments (0.2 lux).18,20 The second approach was to interpolate the illuminance needed to detect an obstacle of specific size. This size was suggested to be 25 mm, with an expectation to detect this somewhere between two and ten paces ahead, and this resulted in an estimated optimum illuminance of 0.62 lux for young observers under HPS lighting. 19 The support for this 25 mm height is somewhat limited however, and since target size affects detection, 21 a better understanding of obstacle size enables a more robust analysis.
In order to improve ecological validity when estimating the light level needed for obstacle detection this article presents a further investigation of pavement obstacles, specifically the critical size as defined by the minimum height of an obstacle likely to lead to a fall and the typical distance ahead the pavement is scanned. These data are then used to refine the interpolation of the illuminance desirable for obstacle detection.
2. Obstacle height
2.1. Pavement maintenance and liability
The guide used previously 19 as to the height of a pavement defect likely to cause a trip is the threshold used by a local authority for pavement maintenance. This is because the local authority has a statutory responsibility for maintenance of a pedestrian pavement so it may be found liable to claims for compensation arising from a fall causing injury unless they can demonstrate reasonable care to maintain the pavement.3,22,23 Within the United Kingdom, 25 mm (frequently stated as one inch) is a commonly used threshold amongst many local authorities.3,24 There is reference to a 25 mm threshold in an audit checklist to assess outdoor falls risk 25 and in discussion of injuries arising from falls. 26 It is not, however, a universal standard; for example, one UK local authority states ‘If a defect is more than 20 mm deep it will be considered hazardous and our inspector will mark it with yellow paint. Defects that are less than 20 mm deep wouldn’t normally be considered a hazard.’ 27 One possible reason for variation in the height threshold is maintenance response time, with footpaths having more frequent usage demanding a more rapid maintenance response and having a smaller size threshold. 3
The basis for the 25 mm threshold is not stated in these sources: it may be partially derived from case law. A survey 19 of the advice offered by solicitors to prospective clients found a recommendation that trip accidents associated with an obstacle of at least a certain size would be likely to lead to a successful case for compensation: this size was frequently 25 mm, but heights of 15 mm and 20 mm were also found in some cases, again with no apparent justification in any case.
Height alone does not determine liability for a fall, 22 consideration is also given to expectation24,28,29 – in other words, the sensitivity of the observer to the stimulus in addition to its actual intensity. 30 Cohen 28 discusses this from personal experience as an expert witness in US legal cases. In one case a pavement slab raised by 25–38 mm by tree roots was not proven to be liable for a trip because the raised slab was unobstructed, visible for an approach distance of at least 21 m, and therefore should have been within the victim’s normal line of sight. In a second case a pedestrian tripped on a depression of ‘more than 1-1/2 inches’ Despite the pavement being heavily cracked and in the victim’s neighbourhood, and thus probably an expected hazard, the claim for compensation was successful because of alleged minimal lighting: ‘the nearest street light was far behind her and caused her body to cast a growing shadow as she walked’ and therefore she could not reasonably perceive the hazard.
One reason for raising doubt about using 25 mm as a critical value is that a threshold of 6 mm is used in New Zealand as the intervention standard for sudden changes in footpath level,
31
and this was apparently derived from analysis of foot clearance. A more definitive record of obstacle height and trips is found in Bird.
3
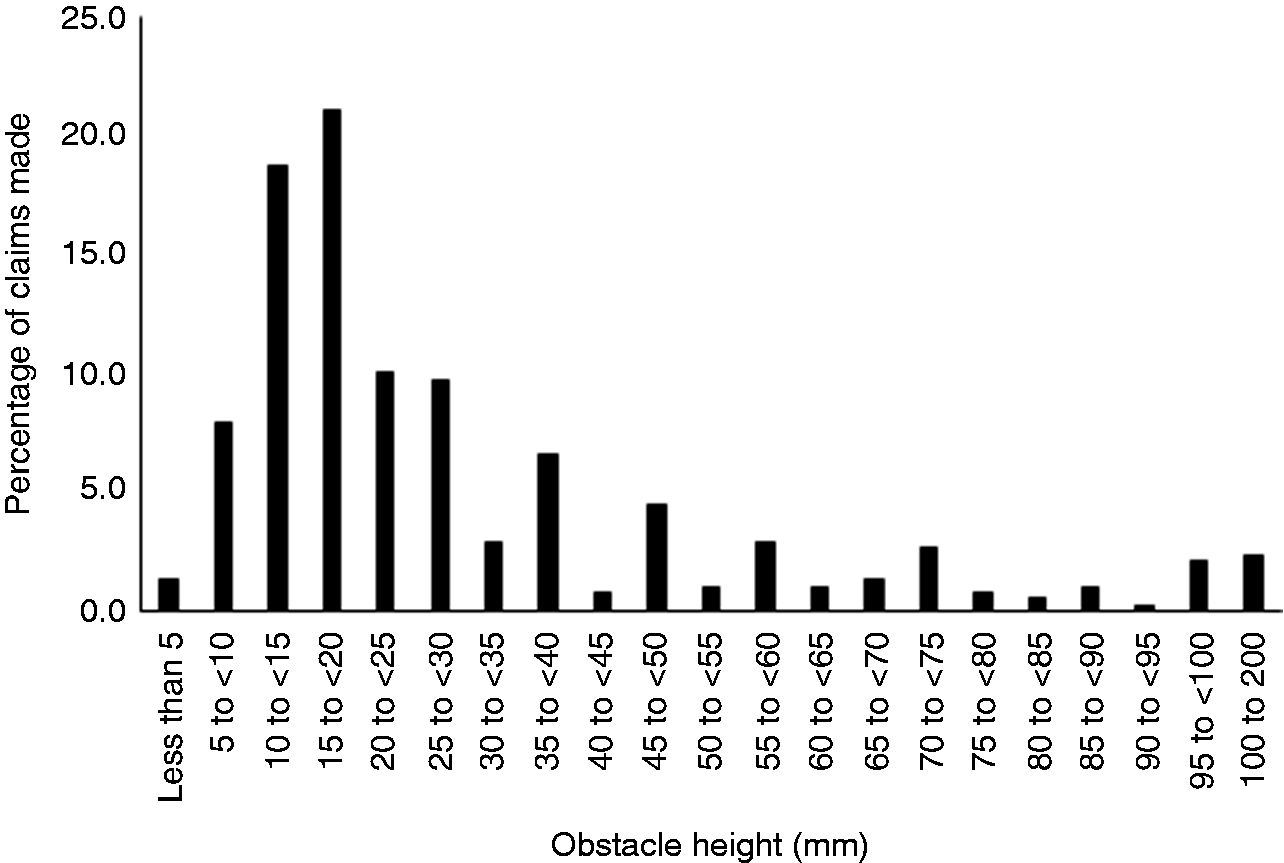
In 389 claims for injury compensation against three UK local authorities the obstacle height was recorded: the range of heights extended from less than 5 mm to 200 mm, with a clear mode for obstacle heights in the range of 10–20 mm (Figure 2).
Percentage of claims made against three local authorities in the United Kingdom (1998–2002) according to obstacle height, after Bird
3
2.2. Foot clearance
Trips occur when the swing foot unexpectedly contacts an object or the ground 32 and foot clearance therefore provides an indication as to whether an obstacle is likely to induce tripping.33,34 Minimum foot clearance (MFC) is the minimum vertical distance between the lowest part of the foot of the swing leg and the pavement surface during mid-swing in the gait cycle. 35 If a pedestrian is walking along a pavement assumed to be flat and even but encounters a raised obstacle that was not seen or expected, then the obstacle may lead to a fall if the obstacle height is greater than their foot clearance.
Minimum foot clearance reported in past studies

Report minimum toe clearance (MTC) rather than MFC.
Reported lower quartile.
Mean minus standard deviation.
Median minus half the reported IQR.
Mean minus reported ‘variability.’
IQR: interquartile range.
Table 1 does not suggest a consistent effect of age on median MFC. A systematic review 35 of MFC studies also concluded this was not the case, with no effect of age on the average (mean or median) MFC; this conclusion was also reported by others36,32 for walking on flat surfaces and by Chen et al. 39 for stepping over obstacles. What may lead to increased risk of tripping for the elderly is greater variability in MFC 35 and when variability is accounted for in Table 1 (the estimated critical height) then the data from both Mills et al. and Begg et al. suggest a lower foot clearance for elderly people than younger people.
The data in Table 1 were obtained in situations where test participants were walking on a treadmill or other flat surface and not expecting a trip hazard. When a hazard is expected, foot clearance increases. 39 This highlights a benefit of lighting in increasing the probability of detecting an otherwise unexpected hazard in sufficient time to enable gait change.
Best and Begg
37
analysed the relationship between the height of an unseen (and therefore unexpected) obstacle and the probability of foot contact, modelling the number of strides before it is likely that a pedestrian would trip over an obstacle of a given height. For example, they suggest a 10 mm obstacle will be tripped over once every 2.1 strides, if unseen. Figure 3 shows this relationship, where the ordinate is the probability of tripping over an obstacle when encountered, calculated as 1/n where n is the number of strides before a trip. This trend closely resembles that reported by Frith and Thomas
1
(their Figure 2.5) for the proportion of people catching their foot on a defect plotted against the height of that defect.
Probability of tripping over an unseen obstacle plotted against vertical height of that obstacle in millimetres
37
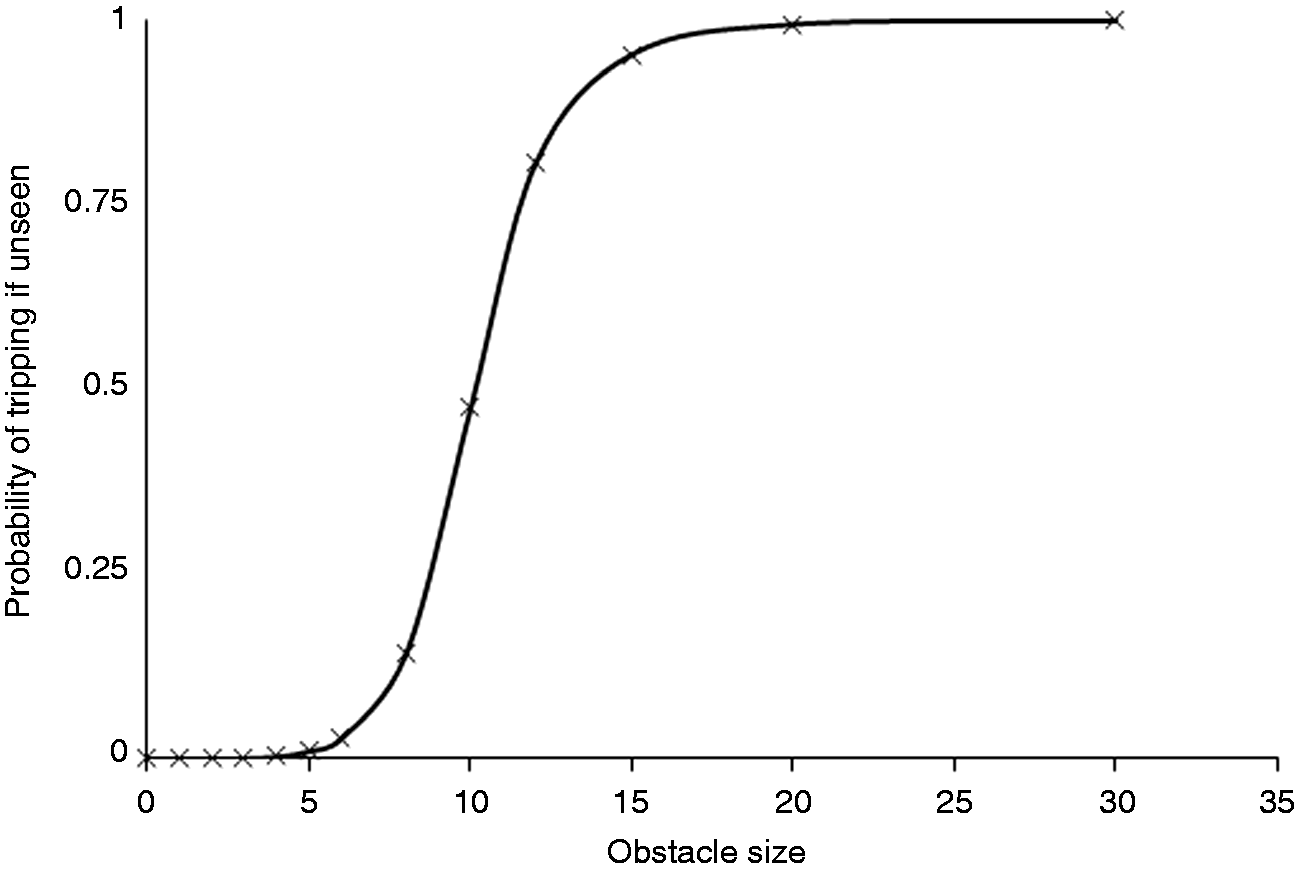
According to Figure 3, an unseen obstacle of height 20 mm or more would almost certainly lead to foot contact and obstacles of height 12–15 mm are highly likely to lead to a trip (p > 80%): it is therefore desirable for lighting to reveal such obstacles so that gait can be adjusted. Below this region the probability of foot contact begins to rapidly decrease. An unseen 10 mm obstacle has a 48% likelihood of causing a trip. There is little need for lighting to reveal anything smaller than approximately 8 mm because the probability of this leading to a trip is much reduced compared with larger obstacles.
2.3. Obstacle height summary
While a pavement defect of vertical height 25 mm is a commonly used threshold in the United Kingdom for prompting repair, there is, however, no apparent empirical justification for this threshold other than the association made by those advising pedestrians to make claims against the local authority following a trip accident. We propose instead that the critical height is 10 mm. This represents approximately the lower quartile of the range of minimum foot clearance measured when walking along a flat surface where hazards are not expected (Table 1) and the lower limit of the range of heights associated with the most frequent number of compensation claims (Figure 2). 10 mm is in the range (8–15 mm) where a change in height has a significant effect of the probability of falling over an unseen obstacle (Figure 3): below 8 mm the obstacle is unlikely to lead to a fall, but above 15 mm it is highly likely to lead to a fall.
3. Detection distance
Determining the size subtended by an obstacle at the observer’s eyes requires an estimate of the distance ahead at which it was detected in addition to the change in vertical height. This detection distance was estimated by further analysis of previous work in which mobile eye tracking was used to investigate the gaze behaviour of 40 pedestrians walking outdoors along an urban route of approximately 900 m, in daytime and after dark.40,41 The 40 pedestrians followed a near-identical route, completing it in both forward and reverse directions on two separate occasions, resulting in the collection of eighty eye-tracking videos. The obstacles examined here are those which were fixated during critical times as marked using a concurrent auditory task, expected to provide significant cognitive capacity interference, 42 and hence at these moments the participant’s attention may have been focused specifically on what they were looking at.
For unpredictable environments, peripheral vision (particularly the lower peripheral field, as might be expected for coping with pavement hazards) is sufficient for successful avoidance of a suddenly appearing obstacle: foveal fixation plays a surprisingly minor role in visual guidance of locomotion and is generally not re-directed to either the obstacle or landing area.43,44 Graci et al. 45 found that when the lower visual field was occluded, observers allowed significantly greater foot clearance and walked at a significantly slower speed – apparently safety strategies to offset the reduction in vision. Rietdyk and Rhea 46 found that there was a higher probability of obstacle contact when the lower visual field was occluded for two steps before the obstacle compared with trials when full visual field was maintained. This is not to say that pedestrians do not look at an obstacle to plan avoidance, just that they do not always need to.
While obstacle detection is a peripheral visual task, eye tracking records foveal fixations. For this analysis it was assumed that peripheral detection occurred immediately preceding foveal fixation on an obstacle at critical moments, and hence the distance at which peripheral detection occurred was estimated as foveal fixation distance plus distance travelled between detection and fixation.
Foveal fixation distances were estimated from the eye tracking videos, as done in previous work. 47 These judgements used as reference the approximate sizes of objects appearing in the field of view, such as vehicles, paving slabs and street benches that appeared in the videos. Two validation steps were used to counter potential errors in these estimates. 48 First, a second coder made distance estimates for a sample (22%) of the obstacles. These were reasonably consistent with the distance estimates of primary coder, with a Pearson’s correlation coefficient of 0.72 (p < 0.01). Inter-rater reliability was assessed using a two-way mixed, consistency intra-class coefficient (ICC). The resulting ICC was in the ‘Fair’ range, 49 ICC = 0.58, suggesting there was reasonable agreement between the coders in terms of distance to the obstacle. The second validation step was to compare actual distances with estimated distances. Actual distances between observer and obstacle locations were measured in situ for 15 situations where the positions of observer and obstacle could be accurately established. These were compared with estimated distances for the same situations as recorded by the primary coder. It was found that estimated distances tended to be slightly shorter than actual distances, a mean ratio (estimated/actual) of 0.95 (std dev. 0.31). The mean distance of the 15 obstacle fixations for estimates and actuals was within 0.03 m (estimated mean = 4.80 m, actual mean = 4.83 m). It was therefore concluded that the estimates of distance recorded by the primary coder were acceptably accurate.
To estimate travel distance between fixation and detection it was assumed that peripheral detection of the obstacle occurred during the immediately preceding fixation, i.e. 300 ms before the obstacle fixation, this being the average length of time for a fixation followed by a saccade. 50 The distance travelled in this 300 ms period was estimated from the average walking speed of that participant, estimated from their personal eye tracking video.
There were 94 obstacle fixations at critical moments in 42 videos from 32 test participants, thus excluding those videos with poor eye-tracking signal or with no critical fixations towards obstacles. As shown in Figure 4 these detection distances tended to lie within 4 m of the observer. The distribution of distances was not found to be drawn from a normally distributed population. The median detection distance during critical times was 3.4 m (IQR = 2.4–5.2 m, n = 94 obstacles).
Distribution of distances to obstacles at peripheral detection (n = 94)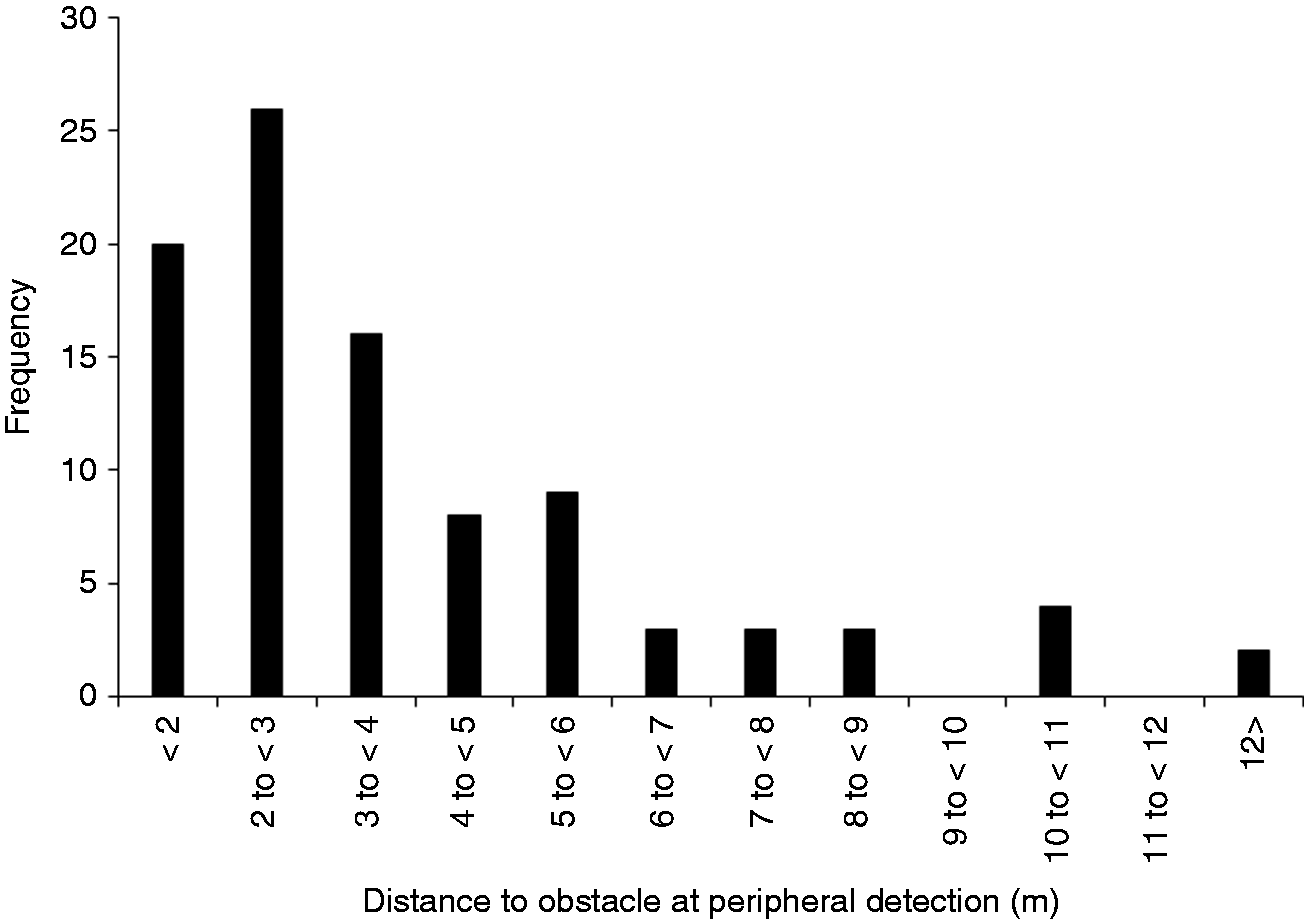
This estimate compares well with that reported in previous work. Obstacle avoidance strategies include a change in gait (i.e. foot placement or foot clearance height), a change in navigation direction (steering) if the obstacle is too large to step over, or stopping.51,52 Gait change (adjusting step length and/or width) has a success rate of greater than 80% when a visual cue is available one step ahead. 51 In contrast, steering has to be planned in the previous step cycle; success rate is near zero when only one-step cycle duration is available for changing direction.51,52 Patla and Vickers 53 found that people fixated two steps ahead when instructed to step on specific targets (footprints) in the travel path. In summary, potential obstacles need to be seen approximately 3 m ahead to be negotiated without gait disturbance. 54
An obstacle presenting a 10 mm change in vertical height that lies 3.4 m ahead subtends a visual angle of 8.47 min arc at the observer’s eye for an assumed eye height of 1.5 m. We refer to this as the critical size because smaller obstacles are unlikely to lead to a trip, and because larger obstacles should be at least as detectable as is this. The next section discusses the light level desirable to optimise detection of this obstacle.
4. Lighting required to detect the critical obstacle
Data regarding detection height and illuminance were taken from Uttley et al.,
20
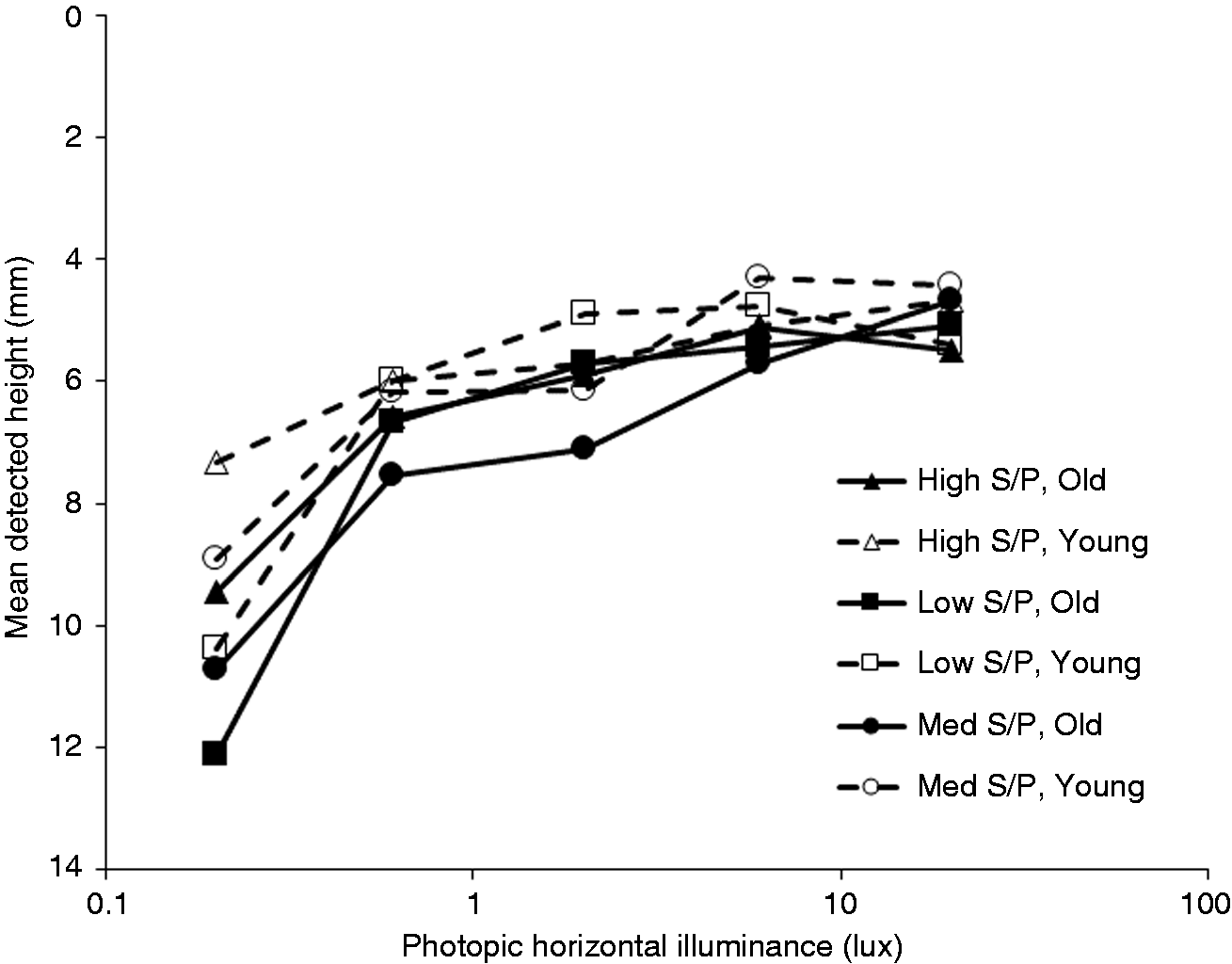
this study being a development of previous work.18,19,55 Test participants were required to detect an obstacle in peripheral vision whilst walking and tracking a dynamic fixation target ahead of them, thus simulating some of the cognitive load of a pedestrian. In the pavement surface approximately 2.6 m in front of them, a cylindrical obstacle would begin rising upwards at intermittent times, and participants pressed a response button to indicate when they detected this obstacle. The height the obstacle had reached upon detection was recorded. This detection task was carried out under five levels of photopic illuminance (0.2–20.0 lux, equating to a luminance range of 0.011–1.33 cd/m2) and three scotopic/photopic (S/P) luminance ratios (1.2, 1.6 and 2.0) by 30 test participants (15 younger, aged < 35 years, and 15 older, aged >50 years). The mean detected heights of the obstacle under each light condition are shown in Figure 5.
Mean height at which a rising obstacle was detected, this being located 2.6 m ahead at floor level, plotted against horizontal photopic illuminance, for different S/P levels and age groups
20
To apply the results from this experiment to other detection distances, the vertical height (mm) at which detection occurred was converted to visual angle (minutes of arc) subtended at the eye. Photopic illuminances were converted to mesopic luminances using the CIE system,
56
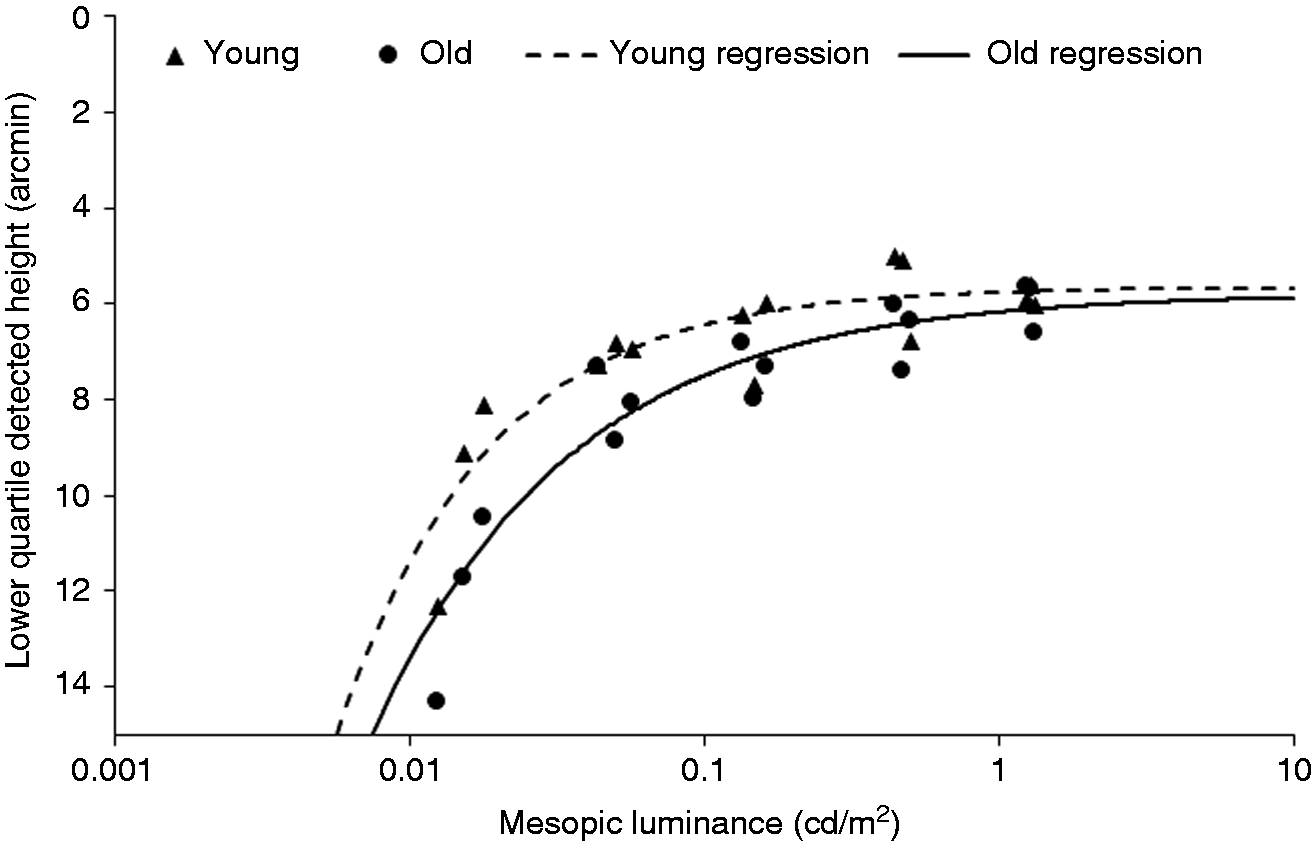
which accounts for the influence of S/P ratio on the results. Using these revised scales, lower quartile detected heights by mesopic luminance for young and old participants in Uttley et al. are plotted in Figure 6. Lower quartile values are used to ensure detection performance at the poorer end of the scale is reflected, thus ensuring results are inclusive of a range of performance levels, not just performance of the ‘average’ pedestrian. Data for the old and young test participants are considered separately and for each a line of best fit was plotted using a nonlinear least-squares regression model, produced by the nls package in R.
57
These models provide a good fit with the actual data, with a standard error of the regression values of 0.89 min arc for the young and 0.88 for the old model, and mean differences between predicted and actual values of 11% for the young model (std dev. = 9%) and 9% (std dev. = 7%) for the old model.
Lower quartile detected height in min arc plotted against mesopic luminance for young and old participants. Data from Uttley et al.
20
Photopic luminance and illuminance ranges required to detect 10 mm obstacle when located 3.4 m ahead for different road lighting lamp types and S/P ratios (indicative S/P ratios as given by the Lighting Industry Association 58 )
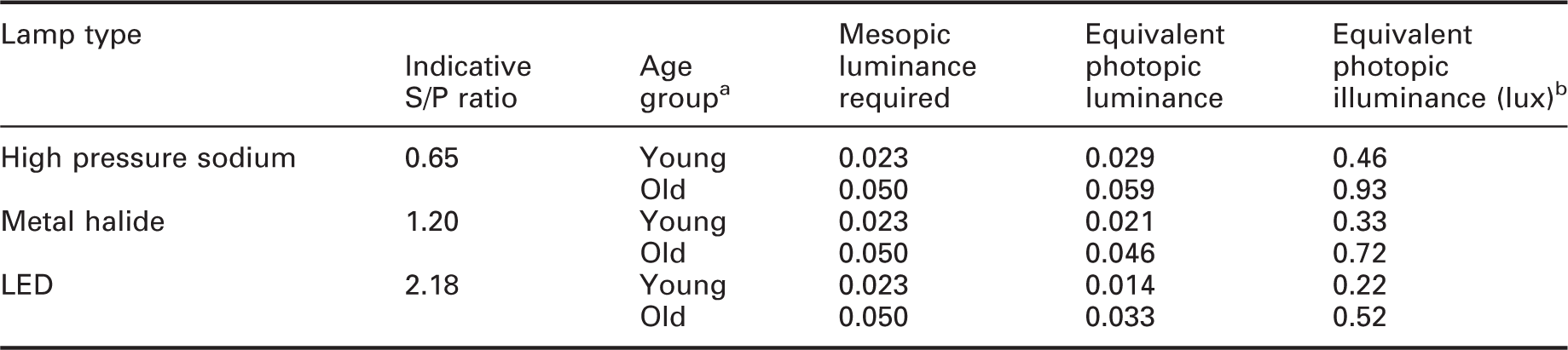
Age groups: Young < 35 years, old > 50 years.
Photopic illuminance estimated assuming a surface reflectance of 20%, which is typical for pavement surfaces.
5. Conclusion
It is proposed that 10 mm is the critical height of obstacle desirable for pedestrians to detect in order to reduce trips. This represents approximately the lower quartile of the range of minimum foot clearance measured when walking along a flat surface where hazards are not expected (Table 1) and the lower limit of the range of heights associated with the most frequent number of compensation claims (Figure 2). 10 mm is in the range (8–15 mm) where a change in height has a significant effect on the probability of falling over an unseen obstacle (Figure 3): below 8 mm the obstacle is unlikely to lead to a fall, but above 15 mm it is highly likely to lead to a fall. Eye tracking data suggests a tendency to detect obstacles located 3.4 m ahead, at which point the 10 mm obstacle subtends a visual angle of 8.47 min arc at the observer’s eye.
Interpretation of the results of obstacle detection experiments 20 suggests that horizontal illuminances in the range from 0.22 lux up to 0.93 lux are required to detect a 10 mm obstacle at 3.4 m distance, depending on the S/P ratio of the lamp and the age of the observer. These data 20 show that higher illuminances lead to increased detection probability, and that the effect reaches a ceiling in the region of 2.0 lux. It was found that observer age and light source S/P ratio affected detection only at the lowest illuminance used in that experiment (0.2 lux). Consideration of these results alongside those of Boyce 15 suggests that a minimum photopic illuminance of 1.0 lux is sufficient light for pedestrians of all ages to safely detect and avoid trip hazards under any type of lamp.
While this illuminance is at the lower end of current recommendations for lighting in subsidiary roads, 17 suggesting a lower design illuminance could be adopted in some situations, there is also a need to consider the effect of glare and the lighting required for other visual needs of pedestrians such as reassurance 59 and interpersonal judgements 60 which may suggest different characteristics for road lighting.
This paper has tended to focus on able-bodied pedestrians: wheelchair users may have different demands. In addition to the need to negotiate obstacles, rough surfaces may also lead to muscular strain for manually propelled wheelchairs and to discomfort through whole-body vibrations.61,62 One US study investigated safe routes for disabled people but did not describe the nature of potential hazards. 63 US guidance suggests a maximum obstacle height of 12.5 mm (0.5 inches), this referring to a purposeful item such as a kerb rather than a defective surface. 62 Further data are desirable.
This paper has focussed on the illuminance that might be optimum for pedestrians to detect pavement obstacles, horizontal illuminance being the main parameter of lighting that is defined in guidance for subsidiary roads,13,17 similar to discussion of obstacle detection using vehicle forward lighting. 64 Whilst, for a specific obstacle, a change in illuminance can change the ability to detect that obstacle,18–20 detection is also affected by the contrast of the obstacle against its surroundings. For a peripheral target, detection improves with targets of increasing luminance contrast, although there is an interaction between contrast, illuminance and light source spectral power distribution. 65
The empirical data employed above to determine an optimum illuminance were derived from an experiment 20 using a single obstacle. This obstacle had sides and surroundings of identical reflectance, simulating a raised paving slab, and presented a luminance contrast of −0.7 (as derived using C = (Lt–Lb)/Lb, with Lt being the luminance of the raised side of the obstacle and Lb being the luminance of surrounding horizontal surfaces). This high contrast arises because the obstacle was lit by LED arrays positioned almost directly above the obstacle, with no additional light sources, thus resulting in relatively high horizontal illuminance and low vertical illuminance. The experiment 20 was designed to investigate changes in illuminance and spectral power distribution and contrast was therefore held constant. Many factors affect obstacle contrast, including the nature of the surfaces of the raised and surrounding materials and the spatial distribution of road lighting, this being determined by parameters including lantern optics and the height and spacing of lamp posts. For example, increased distance between poles reduces visibility of a target. 66 It is therefore expected that pavement obstacles present a range of contrasts, for which the empirical data used here 20 represent only one, and an extension of the relative visual performance model 67 might be a useful tool for exploring the implications.
It must also be remembered that lighting alone is not the only approach to reducing the frequency of pedestrian trips. For example, pavement irregularity caused by the movement of paving slabs could be alleviated by making paving slabs with a chamfered edge.
Footnotes
Acknowledgement
Eye tracking validation was carried out with assistance from Hussain Qasem and Scott Fox, both of the University of Sheffield.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was carried out with support from the Engineering and Physical Sciences Research Council (EPSRC) (grant number EP/M02900X/1).