
Abstract
Data-driven approaches have been applied to structural health assessment due to their capability to address complex challenges and achieve high-precision and rapid defect detection. This article presents a deep learning-based generalization framework for guided wave (GW)-based damage identification in diverse isotropic beam-like structures with various cross-sectional geometries and material properties. A multiscale convolution and squeeze-and-excitation attention-assisted bidirectional hybrid (MC-SE-BiH) network is proposed to generalize the damage identification. A higher-order beam model is employed to enhance computational efficiency and simulation accuracy of modelling GW propagation in various damage scenarios. A series of numerical case studies is carried out to demonstrate the generalization ability and robustness of the proposed MC-SE-BiH framework in damage identification using GW. The effectiveness and practicality are further validated using experimental measurements obtained from isotropic beams with different material properties and cross-sectional configurations. The results demonstrate that the proposed MC-SE-BiH framework can identify damage across diverse beam-like structures.
Keywords
Introduction
Damage detection and identification is one of essential components in structural health monitoring (SHM). Reliable damage detection and identification techniques play a critical role in ensuring structural integrity, reliability, and serviceability. Exploring robust early-stage damage detection techniques has garnered significant attention, especially for high-value assets. Over the past decades, numerous damage detection techniques have been developed to ensure structural integrity, detecting potential defects and/or identifying risk caused by structural failure. These techniques available, generally include simple visual inspection, eddy current, conventional A- or C-scan ultrasonic testing, acoustic emission, vibration-based approaches, 1 and ultrasonic-guided wave (GW)-based approaches. 2 Compared with conventional damage detection techniques, those based on vibration and GW are the predominant techniques. Vibration-based techniques are effective for global structural monitoring by leveraging modal parameters or dynamic responses, but they may be insensitive minor local defects that are crucial for structural safety. On the contrary, GW-based damage detection technique has been proven to be one of the most promising techniques for early-state damage detection due to their high sensitivity to local and minor defects, ability to travel relatively long distances and capability of inspecting hard-to-reach regions of the structures.3–5
Non-model-based and model-based approaches for damage detection using GWs
GW-based damage detection can be categorized into non-model-based and model-based approaches. Non-model-based GW approaches detect damage by analysing changes in specific features of acquired signals compared to a reference GW signal measured in health or prior state. However, obtaining an accurate baseline signal remains a significant challenge in practical situations. 6 Additionally, non-model-based GW approaches often require selecting an appropriate wave mode based on the correct dispersion characteristics of each target structure for effective evaluation. Model-based GW approaches utilize a model to characterize or establish the relationship between GW responses and structural damage. These model-based approaches have become increasingly prevalent in damage detection due to their ability to achieve baseline-free characteristics and provide quantitative damage information.
Based on the nature of numerical models, model-based GW approaches can be categorized into physics-based models and data-driven models. 7 Specifically, damage identification of physics-based models is achieved using physical-meaning model such as analytical solutions and finite element (FE) models. The model’s ability to accurately simulate GW propagation and its interaction with damage is crucial in these physics-based GW approaches. While physics-based models offer valuable insights and a high degree of interpretability, they are often constrained by numerous assumptions, high computational costs, and reduced accuracy in complex damage scenarios. Analytical solutions require simplified assumptions before application, which are effective only when conditions are straightforward and the damage can be represented numerically or analytically.8,9 Although FE simulation-based optimization methods can iterate damage properties by taking advantage of the traditional FE method’s ability to model precise GW propagation with appropriately small element sizes, the computational cost is significant and often impractical, especially for more complex or large-scale structures. 10 To address the computational burden, a variety of modelling approaches have been developed. 11 For example, frequency-domain spectral FE (SFE) method achieves computationally efficient compared with the conventional FE method, as it directly employs spectral analysis techniques to investigate structural behaviors at discrete frequencies by solving the partial differential governing equations in the frequency domain. 12 Alternatively, time-domain SFE method utilizes Gauss–Lobatto–Legendre (GLL) nodes together with high-order approximation polynomials to reduce the number of elements in FE simulation to enhance computational efficiency, while maintaining accuracy. 13 These breakthroughs in FE simulation have made significant progress for model-based approaches. However, a considerable computational cost is still required due to the necessity of iterative simulation, which may limit its practicality for complex SHM applications. Furthermore, the adaptability of this method is limited, as its applicability is confined to a well-defined structural configuration, which also highlights the necessity of obtaining the structure-related parameters prior to implementation. 14
To summarize, these limitations make it more challenging to quantitatively characterize the physical behaviors of GW, let alone generalizing damage detection to different structures. In contrast, data-driven models can directly capture the intricate patterns and nonlinear relationships inherent in the data itself, without the need for explicit physical modelling. 15 Due to the ability to bypass the need for complex prior knowledge (e.g., frequency dispersion and multimode characteristics in GW) and their flexibility in addressing complex problems, data-driven approaches have attracted considerable interest from researchers.16,17
Data-driven approaches in damage detectionusing GWs
Data-driven approaches utilize machine learning (ML) or deep learning (DL) to obtain mapping relationships between data collected from structures and object variables (e.g., damage characteristics or performance indicators), enabling structural health diagnosis and prediction. These approaches provide an intelligent platform to implement online damage detection in structures. Some ML model-assisted frameworks for GW-based damage identification have been successfully developed and applied. To address a complex challenge of modal analysis-based approaches, Mahajan and Banerjee 18 extracted damage features from GW responses to train a ML-based framework for identifying damage type, location, and severity on railheads. Lyu et al. 19 proposed a data-informed framework for GW-based damage detection using a support vector machine (SVM), where wave energy distribution vectors derived from captured GW signals served as input features for the SVM classifier. Khan et al. 20 investigated the role of ML in intelligent structural assessment, emphasizing that the quality and effectiveness of features fed into ML model is crucial. ML has demonstrated its capability in assisting wave analysis and improving damage detection efficiency. However, its effectiveness is somewhat limited by the need for manual feature selection.
In contrary, DL techniques have recently gained significant attention due to their ability to perform feature extraction without requiring operator intervention or extensive domain expertise to design an effective feature extraction. 21 Specifically, DL models can process raw data and automatically extract hierarchical feature representations. In GW-based damage detection applications, convolutional neural networks (CNNs) have been extensively and successfully used for damage detection. Liu and Zhang 22 framed the damage detection problem of notch-type crack detection as an image classification task utilizing a CNN framework. Gonzalez-Jimenez et al. 23 proposed a CNN-based regression algorithm for damage localization in composite structures, where GW signals, generated through a pseudo-damage methodology, were transformed into image representations. Beyond image-based input, the direct utilization of entire GW signal presents an alternative avenue for training DL models. 24 Most existing CNN-based GW methods utilize convolutional operations within the CNN to extract features from GW responses. Notably, the receptive field size in these convolutional operation significantly impacts the quality of feature extraction. 25 A limited receptive field may yield features with detailed information but restricts them to local characteristics, potentially leading to overfitting. Conversely, an excessively large receptive field can introduce redundant of irrelevant information, resulting in underfitting.
While improved CNNs are capable of learning higher-order damage-related features from GW responses, they may not fully capture the inherent temporal information within the time-series data. 26 For time-series data, recurrent neural networks (RNNs), such as long short-term memory (LSTM) networks, have been widely employed across various fields due to their ability to model temporal dependencies in sequential data. Rautela and Gopalakrishnan 27 developed a DL-assisted framework utilizing GW responses, generated by a reduced-order SFE model, as input to train a LSTM for damage identification. Rezazadeh et al. 28 employed a conditional generative adversarial network to generate GW signals of distinct fault categories, subsequently training a LSTM model for damage classification. However, GW responses encompass both temporal and spatial information. The comprehensive extraction and learning of relevant spatiotemporal features related to damage is crucial for data-driven methodologies. Consequently, the development and integration of DL algorithms has gained increasing prominence in damage detection.29–31 Specifically, RNNs and CNNs are frequently integrated to leverage their respective strengths, enabling the simultaneously consideration and learning of spatial and temporal information from input data, thus enhancing the prediction performance of the developed algorithm.32,33 While such integrated algorithms can capture spatiotemporal information from GW responses, there are still limitations such as the former algorithm’s output containing insufficient damage-related information and/or the latter algorithm has limited feature extraction capabilities. Notably, recent advances in DL have progressively improved the capacity of data-driven methodologies to extract and interpret meaningful information from data. 34
Generalization in GW-based damage detection
Although the numerous methodologies have been proposed in the literature, GW-based data-driven approaches for damage identification often yield configuration-specific results, with many studies focusing on single case scenarios. Specifically, a well-trained model is typically optimized for a structure with fixed material properties and dimensions, thus limiting its applicability to structures with different attributes. 7 Furthermore, the majority of researches on the generalization problem of data-driven approaches focuses on robustness investigations related to modeling errors or environment and measurement uncertainties, 27 while a significant gap remains in exploring the application of a universal or generalized data-driven approach for damage detection across different structures. GWs are highly sensitive not only to structural damage but also to the properties of material and the shape of the structure itself. This means that even the same type of damage can produce different reflected GW signals in different structures, depending on their shapes, material, and environmental conditions. Additionally, because structures vary in geometry and material, the relationship between damage and GW signals is complex and nonlinear. As a result, data-driven models need advanced nonlinear modelling capabilities to interpret these differences accurately.
Conventional DL techniques often fail to create a single model that works well for many different structures at once. Instead, specialized models may be needed for different types of structures. Most DL-based methods in damage detection also require large datasets, particularly for regression tasks. However, a major challenge in damage identification is the lack of sufficient training data for DL models. When limited datasets are available for a specific structure, DL-based models struggle to learn the accurate underlying relationship between input and corresponding output, for example, GW responses and damage parameters. Consequently, these models are susceptible to generating in inaccurate damage diagnosis results.
Transfer learning has recently demonstrated its effectiveness in reducing the reliance on extensive datasets from target structures, 35 leveraging knowledge from a source domain to address related target domain problems.36,37 However, pretraining a foundational model for the original structure still typically necessitates substantial datasets. Furthermore, adapting the model to multiple diverse structures requires fine-tuning for each target, increasing application complexity when dealing with a range of structures. Moreover, the fine-tuned model may exhibit diminished performance on the original pretraining structure and potentially demonstrate instability when confronted with new structures significantly differing in attributes, or even face domain mismatch risk. 38 In summary, a more direct and pragmatic data-driven approach is needed to develop a generalization framework for damage identification across diverse structures, which constitute the primary objective of this study. Leveraging advancements in DL, the effective integration and development of various DL techniques can enhance the capacity to extract and learn complex mapping relationships between high-dimensional nonlinear data and objective variables. 39 The deeper insights offered by developed DL techniques hold significant potential for addressing the challenge of generalizing damage detection in a series of structures. Generally, data-driven models are inherently black-box models due to the lack of physical knowledge embedding. Consequently, to improve model’s credibility, a comprehensive evaluation of its performance is particularly important.
Beam-type elements play critical roles in real-world applications, such as engineering truss structures, aircraft wing or aerospace/automation frames, and steel girders. The signal acquisition paths in beam-like structures may be extremely limited, unlike plate structures, which can be collected signals containing sufficient damage information by arranging sensors along different paths. Therefore, this article proposes a noveldata-driven approach, multiscale convolution, and squeeze-and-excitation attention-assisted bidirectional hybrid (MC-SE-BiH) network, for generalized damage detection across different beam-like structures. To support the construction of damage detection scenarios from different structures, a validated higher-order beam model (HOBM) that achieves satisfactory accuracy while maintaining computational efficiency, 40 enables reliable simulation of GW responses across various beam-like structures. Concurrently, the sample size for each HOBM with a specific configuration is intentionally limited and relatively small, rendering DL-based methods unable to learn an accurate mapping relationship between GW responses and defects. As an alternative, this study investigates whether GW responses from similar or different structures can contribute or augment the learning process for the proposed generalization framework when training datasets from a configuration-specific structure are insufficient or limited. To assess the applicability of the developed framework for detecting damage in a broader range of beam-like structures, material uncertainties are incorporated into case studies by modulating material properties of HOBM. Furthermore, data augmentation techniques are employed to enhance data diversity for robust analysis. The effectiveness, practicality, and accuracy of the proposed generalization framework are evaluated using experimental data from various beam-like structures. In the present work, the generalization ability of the proposed approach is carefully validated across various damage scenarios, where the outputs have been thoroughly validated against numerical and experimental data, showing stable and reliable performance within the scope of this study. Therefore, this also brings confidence that the proposed data-driven model can make reliable predictions. After completing the primary research objectives, this work also explores and discusses damage detection for unseen structures, attempting to further examine its extreme performance.
The article is organized as follows: the second section presents the methodology. The third section details dataset generation and preparation for training. The fourth section presents case studies of diverse beam-like structures under varying uncertainties to comprehensively demonstrate the generalization ability and robustness of the proposed framework. Subsequently, the fifth section presents an experiment to evaluate the effectiveness and practicality of the proposed generalization framework. Finally, conclusions are provided in the sixth section.
Proposed data-driven approach for damage identification
This research proposes a data-driven approach, employing a MC-SE-BiH network, to achieve generalization of damage identification across diverse structures. Figure 1 shows the architecture of the proposed MC-SE-BiH. The general description of each key module in Figure 1 is provided as follows:
(1) The MC module employs three convolution kernels of different sizes and designs to extract feature information from raw GW time domain signals at various scales and then fuses these multiscale features. This module enables capturing local subtle variations of GW responses and global patterns across various perception domains, thereby enriching the features.
(2) The SE attention block is integrated to adaptively recalibrate channelwise feature responses. By emphasizing informative features and suppressing interfering ones, this mechanism directs the model’s focus toward critical features.
(3) The BiH network module processes the sequential data by capturing temporal dependencies in both forward and backward directions, enabling richer contextual feature extraction for damage identification. In the final regression stage, a multilayer perceptron (MLP) is used to learn complex relationships within the high-dimensional feature space through fully connected (FC) layers, while rectified linear unit (ReLU) layer introduces essential nonlinearities for continuous value prediction. The use of a Huber loss function further optimizes the performance.
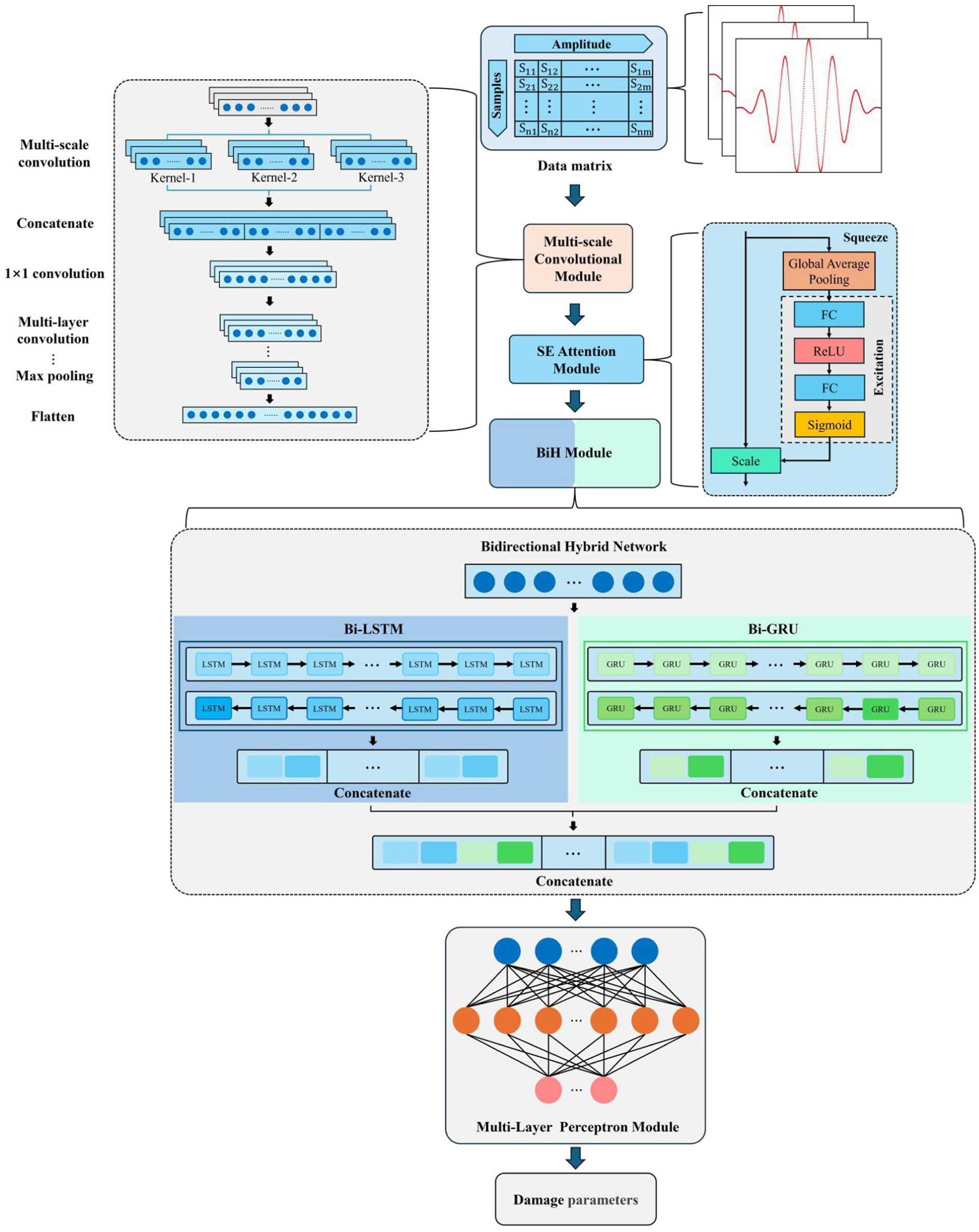
Schematic overview of the proposed MC-SE-BiH network architecture. MC-SE-BiH: Multiscale convolution and squeeze-and-excitation attention-assisted bidirectional hybrid.
MC module
Inspiring by the MC neural network, 41 this study proposes a MC module that employs multiple convolutional filters with varying kernel sizes to capture multiscale features from input data. By processing information across different receptive fields, the MC module effectively integrates the extracted information from each receptive field to obtain higher-level global information. By merging the features across multiple scales, MC module has the potential to get more comprehensive features at various scales, improving the availability of input characteristics.
The detailed architecture of the MC module is illustrated in Figure 2. The GW time domain signals are input into convolution layers of different scales across three branches. To achieve an optimal balance between feature extraction capability and computational efficiency, 42 we employ convolutional kernels of varying sizes (3 × 1, 7 × 1 and 11 × 1) to extract features across different receptive field scales. Specifically, random search within empirically bounded ranges were performed across various candidate combinations (kernel sizes and filter numbers) to efficiently determine the configuration that balanced accuracy and computational cost. 43 The search range for kernel size and filter number in the MC module is shown in Table 1. The small kernels (e.g., 3 × 1) are effective for fine-grained local patterns, while larger kernels (e.g., 11 × 1) help in modelling broader information. The intermediate kernels (e.g., 7 × 1) serve as a bridge between both receptive fields. The final configuration reflects the most appropriate trade-off observed in the trial experiments, while enabling the model to capture multiscale features effectively. Following each convolutional operation, a batch normalization (BN) layer, 44 is used to accelerate the convergence of the operation by reducing internal covariates. To enhance the model’s ability to capture the details and complex patterns in the input data, nonlinearity is introduced through the Gaussian error linear unit (GELU) activation function. 45 The GELU activation enables smooth integration of subsequent features from different branches. The mathematical formulation of GELU is given by

where x represents the pre-activation value,
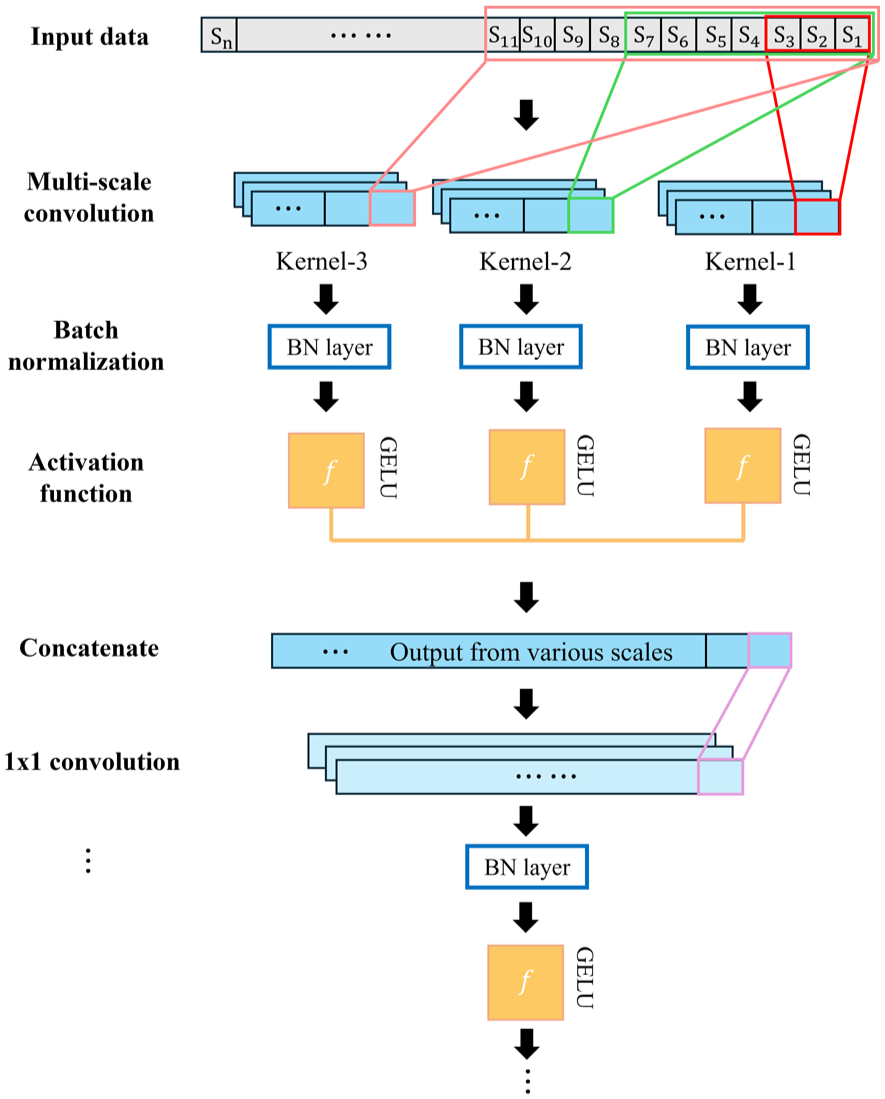
The proposed multiscale convolutional structure.
The search range for kernel size and filter number in the MC module.
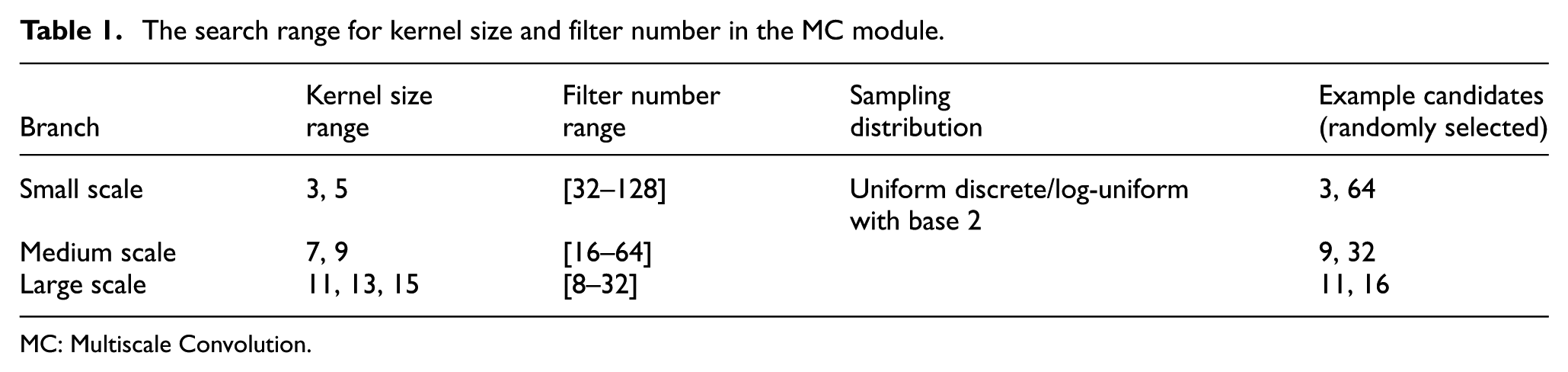
MC: Multiscale Convolution.
The features obtained from different scales are concatenated, and a 1 × 1 convolution 46 is applied to aggregate and re-extract these features. Following the multiscale convolution operation, a multilayer convolution process is used to further distill, aggregate, and enhance the fused features across various scales, facilitating deeper integration. 47 The subsequent multilayer convolution blocks consist of basic CNN modules, including convolutional blocks (ConvBlock) and pooling layers. Each ConvBlock includes a one-dimensional (1D) convolutional layer, a BN layer and a ReLU activation layer. 48
SE attention
The SE attention mechanism is a channel attention mechanism designed to enhances network representation by explicitly modelling interdependencies between feature channels. It recalibrates channelwise feature responses by assessing the importance of each channel within the feature maps.
49
The squeeze operation aggregates feature response from the input feature maps to capture global information, such as GW signal amplitude or reflection wave location. The aggregation is achieved through global average pooling operation to generate channel-wise statistics. The output of the multiscale convolution module is defined as

where
After that, the excitation operation utilizes the channelwise statistics from the squeeze operation to fully capture the channel dependencies. The squeezed output

where
In the final step, the recalibrated feature map

where
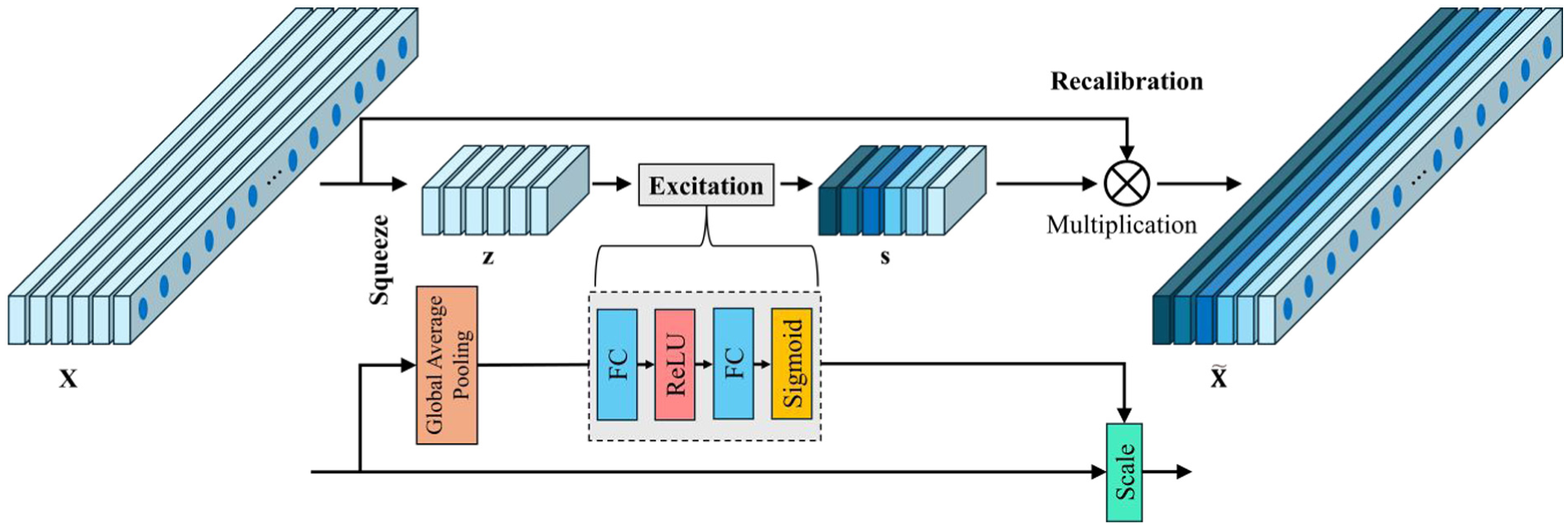
The diagram and detailed layer configuration of the SE attention module in this study. SE: Squeeze-and-Excitation.
The channel attention module is computationally efficient and can be easily integrated into the proposed architecture. By enabling adaptive channel recalibration, it delivers substantial performance improvements. The module processes multichannel feature maps generated from GW signals through convolution operations. Subsequently, the SE attention module applies “squeeze” and “excitation” operations to dynamically weight channelwise feature contributions. This adaptive weighting mechanism enhances the model’s ability to prioritize more important features relevant to the target task, such as damage identification in this study.
Hybrid network of Bi-LSTM and Bi-GRU network
In time domain signal analysis, such as GW time domain responses in this study, sequential data often exhibits complex temporal patterns. Accurate interpretation and extraction of damage-related information from GW responses are crucial for achieving generalized damage identification across different structures. To address this, the BiH network can simultaneously analyse both preceding and succeeding time steps, enhancing its ability to capture intricate temporal relationships that may be overlooked in single-directional models. A parallel model combining bidirectional LSTM (Bi-LSTM) and bidirectional-gated recurrent unit (Bi-GRU) provides a robust solution for time-series data analysis. Specifically, Bi-LSTM has strong ability in capturing long-term dependencies within time series, while Bi-GRU offers computational efficiency and effectively captures short-term dependence features. 26 This hybrid architecture leverages both the long-term memory capabilities of Bi-LSTM and the sensitivity of Bi-GRU to instantaneous changes. By effectively integrating the strengths of both Bi-LSTM and Bi-GRU, the BiH network achieves a more comprehensive representation of GW characteristics. This hybrid model leverages their complementary capabilities to enhance the learning of signal patterns. Furthermore, this network excels at extracting and representing multilevel feature information, improves adaptability to signals generated from diverse structures during GW-based damage detection, thereby enhancing the generalization capability of the proposed framework.
Bidirectional long short-term memory
LSTM unit was specifically designed to capture long-range dependencies in sequence data. Through the gating mechanism architecture, LSTM effectively address the vanishing and exploding gradient problems inherent in traditional RNNs. 50 The bidirectional long-term memory network 51 is a variant of the LSTM model that learns complex temporal dependencies in sequential data by processing it in both forward (past to future) and backward (future to past) directions. This architecture enables the model to capture both past and future information, which is crucial for tasks requiring deep interpretation of time sequences. In a Bi-LSTM architecture, the input sequence is processed by two distinct LSTM units: one in the forward direction and another in the backward direction. The detailed structure of each LSTM is illustrated in Figure 4(a). Each LSTM unit comprises three main gates: the forget gate, the input gate, and the output gate. 52
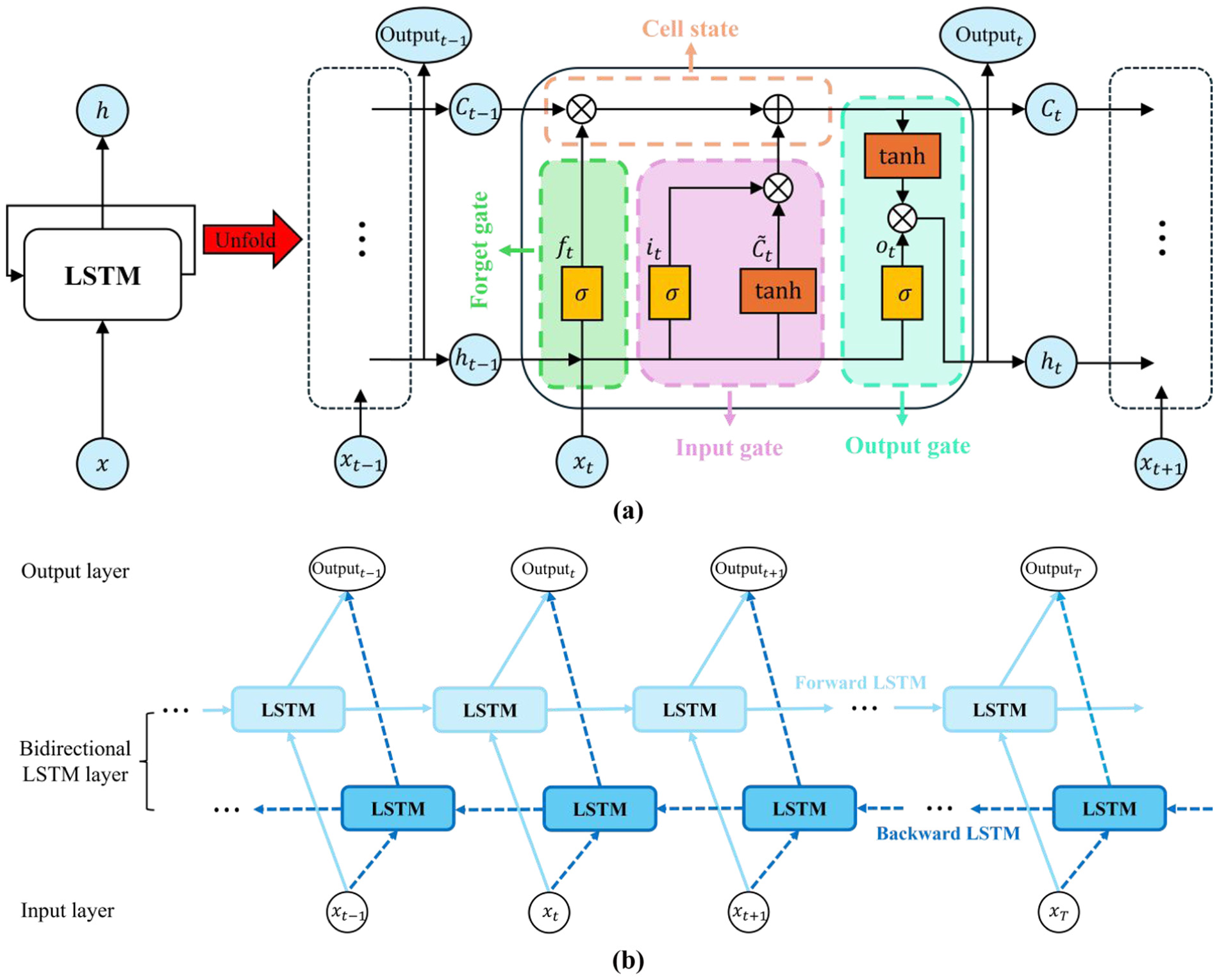
(a) Detailed structure of an LSTM unit and (b) illustration of Bi-LSTM model, where
Bi-LSTM extends the fundamental LSTM architecture by combining two independent LSTMs, thus overcoming the limitation of predicting future outputs solely based on the time information of the previous moment. Specifically, for an input sequence

where
Bidirectional gated recurrent unit
The Bi-GRU is a variant of the RNN architecture, specifically designed to capture both past and future dependencies in sequential data. 53 It achieves this by introducing bidirectional processing to the GRU, 54 where the input sequence is traversed in both forward and backward directions. The bidirectional processing enables a more complete representation of the temporal dependencies within the data, particularly when information (e.g., damage-related information) from both earlier and later time steps is crucial for accurate predictions. Specifically, the GRU unit operates based on two main gating mechanisms: the reset gate and the update gate. 55 Compared with LSTM, GRU is more computationally efficient due to its simpler architecture and fewer parameters. Furthermore, the gating mechanisms of GRU enhance its ability to capture short-term dependencies in sequential data. 26 The reset gate and update gate regulate the flow of information through the network, controlling the retention of past information and the integration of new information. Consequently, the final hidden state maintains an effective balance between the two aspects. The detailed structure of the GRU unit is shown in the Figure 5(a).
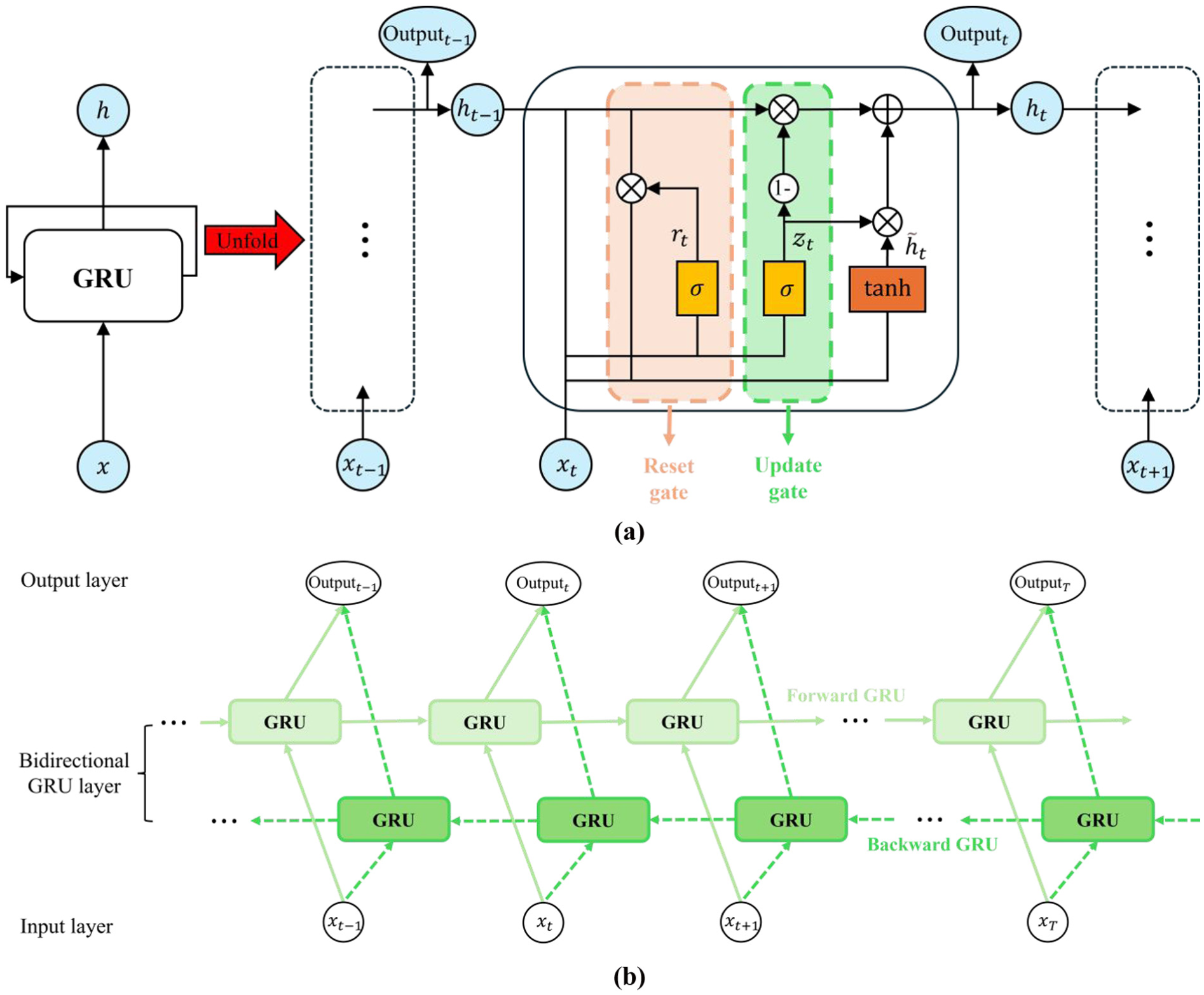
(a) Detailed structure of a GRU unit and (b) illustration of a Bi-GRU model, where
Similar to Bi-LSTM, Bi-GRU processes an input from forward and backward directions using two GRU units. Formally, the forward GRU and the backward GRU process the input simultaneously based on the inherent order and the reversed order of the sequence. At each time step t, the forward and backward hidden states are concatenated to form the final hidden state:

where
Loss function and evaluation metrics for damage identification
Huber loss function
Huber loss function, 56 is used as the loss function in the proposed approach for damage detection regression task, which is motivated by the need to balance sensitivity to small errors with robustness against outliers. This function integrates two common error assessment methods: mean square error (MSE) and mean absolute error (MAE). 57 When the residual is small, it optimizes the model like MSE (quadratic loss), ensuring that minor errors are effectively processed. On the contrary, when the residual is large, it reduces sensitivity to outliers like MAE (linear loss), thus preventing these abnormal data from excessively affecting the model training. The Huber loss function is calculated by the following equation:
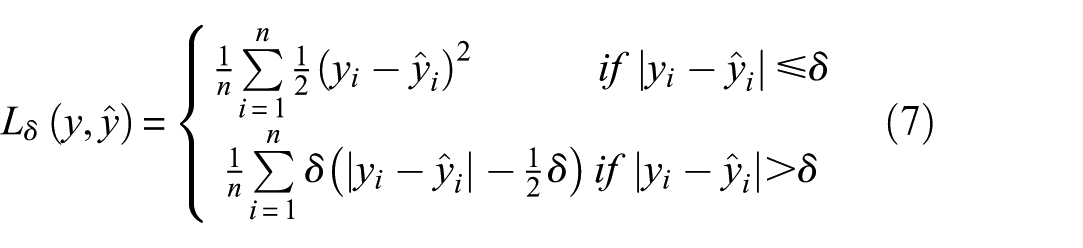
where δ is the threshold, which determines the transition from quadratic to linear error, and its value can be selected by cross-validation.
58
Evaluation metrics
For data-driven approaches, it is particularly important to thoroughly and effectively investigate the model performance. To comprehensively evaluate the generalization ability and robustness of the proposed framework, the root mean squared error (RMSE), the coefficient of determination (R2), 59 and the mean absolute percentage error (MAPE) 27 are used as evaluation metrics. These matrices are calculated using the following equations:



where
Training and structure details of the proposed approach
The proposed MC-SE-BiH is trained using adaptive moment estimation (Adam), 60 a variant of the stochastic gradient descent algorithm. Adam is well-suited for large datasets and high-dimensional space of ML problems. It adaptively adjusts learning rates for each parameter to enhance convergence and stability. The initial learning rate was set to 0.0001 and reduced by a factor of 0.1 (10% of its previous value) every 50 training epochs. This strategy of piecewise learning rate facilitates rapid convergence during initial training phase while maintaining high validation accuracy in the final stage. The model batch size was set to 16 and the maximum training iterations was set to 200 epochs. Prior to training, the entire dataset was randomly shuffled and arranged into training and evaluation sets to prevent training bias caused by uneven sample distribution or sequence correlation. In addition, dynamic shuffling was applied at the beginning of each epoch to introduce stochasticity in sample presentation of dataset during training, thereby improving model generalization and reducing overfitting.
To implement the feasibility investigation of the methodology, this article adopted both numerical and experimental studies to fully examine the performance of the framework for generalizing damage identification. A series of isotropic beam models with diverse cross-section geometries and material properties were used for comprehensive assessment. The objective of the proposed framework is to accurately identify the location and severity of damage in diverse beam-like structures. Initially, a number of damage cases are generated using numerical model descripted in next Section 3. To assess robustness of the proposed model, these datasets were employed for training, validating, and testing, with an 80%: 10%: 10% split, across various scenarios, which is a cross-validation method widely used in DL-based SHM investigations. After that, experiments were conducted, and the experimentally measured data were used to further evaluate the ability and accuracy of the trained framework. The input fed into MC-SE-BiH is the raw GW time-domain signals, which contain 4000 amplitude points. The regression outputs, damage location and depth percentage, are simultaneously characterized by this framework. The network configuration details of the proposed MC-SE-BiH are presented in Table 2. The model was trained using an Nvidia T1000 graphics processing unit (GPU) (Santa Clara, CA, USA). Notably, computational demand may become issues when scaling to larger datasets. Although training may need more time, the trained model can be used for instantaneous damage identification. Therefore, this diagnostic model that can instantly exert detection capabilities will provide real-time health status in actual monitoring. In addition, computational burden in training can be reduced by using high performance computing, parallel computation, parallel GPU, which is common in computer science field. In the future, more powerful hardware platforms can be adapted to alleviate computing cost issues during training.
The network configuration details of the proposed MC-SE-BiH.
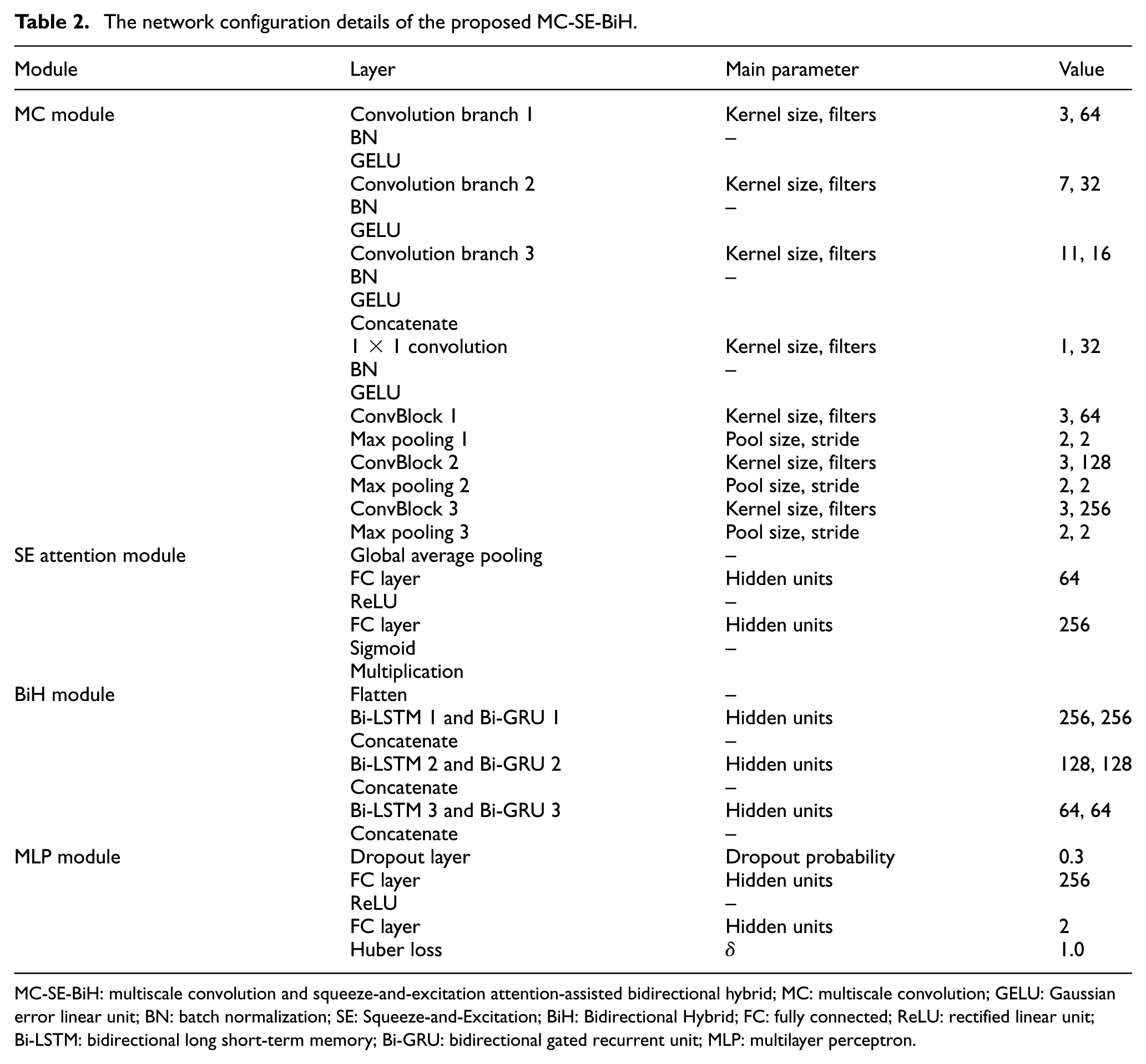
MC-SE-BiH: multiscale convolution and squeeze-and-excitation attention-assisted bidirectional hybrid; MC: multiscale convolution; GELU: Gaussian error linear unit; BN: batch normalization; SE: Squeeze-and-Excitation; BiH: Bidirectional Hybrid; FC: fully connected; ReLU: rectified linear unit; Bi-LSTM: bidirectional long short-term memory; Bi-GRU: bidirectional gated recurrent unit; MLP: multilayer perceptron.
Dataset generation for generalization framework
Numerical simulation using HOBM
For ML regression purpose, a substantial amount of data is required to achieve satisfactory accuracy. Given the difficulty of obtaining real-life and experimental datasets, numerical simulation is employed in this work to generate synthetic data for training the generalization framework. To enhance computational efficiency while maintaining simulation accuracy, a HOBM utilizing SFE method is employed. 40 HOBM has demonstrated strong performance in simulating GW prorogation in laminated beam-like structures.61,62 It can simulate the entire beam across multiple physical layers in the transverse (z) direction (see Figure 6(a)).
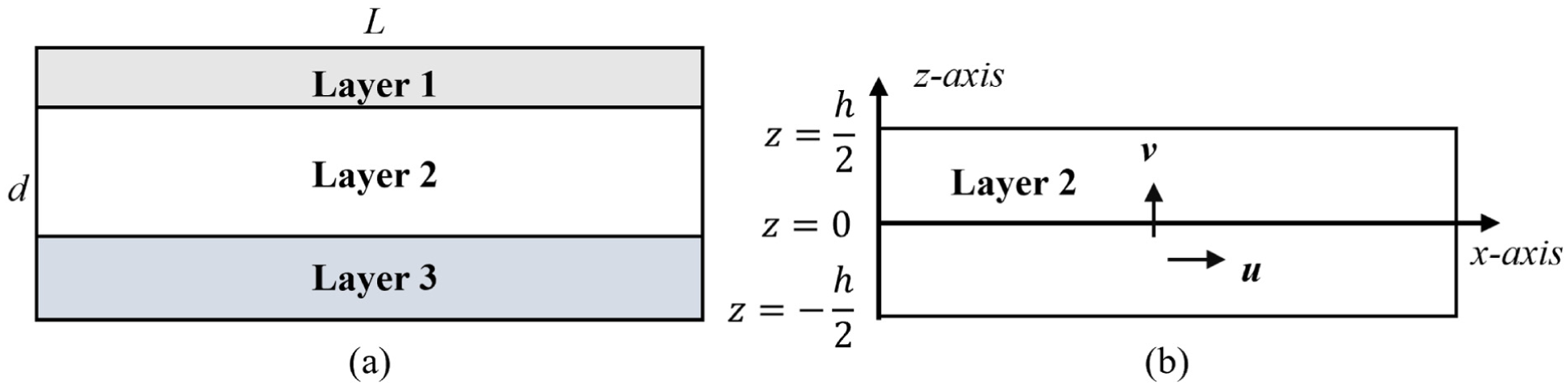
(a) A SFE beam model with length, L and thickness, d simulated by three physical sublayers and (b) higher-order displacement orientations in physical layer 2. SFE: spectral finite element.
Higher-order displacement kinematics of through thickness direction is employed in HOBM to model each sublayer
40
as shown in Figure 6(b). Each sublayer is assumed to be under plane-stress condition in the deformation plane. Both in-plane deformation, u, and transverse deformation, v, can be represented by incorporating displacements at the top surface


where h is the thickness of sublayer,
The proposed HOBM leverages a multilayer capability to enable the incorporation of varying material properties at across sublayers, significantly simplifying composite beam simulations.61,62 Additionally, HOBM permits division of an isotropic beam into discrete subsections, which allow simulating localized damage at specific positions. Also, through higher-order displacement kinematics, HOBM maintains superior accuracy even for thick beam scenarios.40,62 To enhance computational efficiency, SFEs with GLL nodes are incorporated so that the total required number of FE can be significantly reduced. The GW propagation simulation is then performed by assembling element matrices from each SFE in layers and solving the equation of motion using an explicit central difference method.40,62
A common and representative type of damage in pipes, rods, and railroad tracks – slot cut, was considered as the type of damage for simulation. Slot cuts provide controllable and repeatable damage morphology, aligning experimental specimens with their numerical counterparts. Unlike naturally occurring cracks or complex damage patterns, slot cuts allow for precise creation of damage of specific size and location. This consistency facilitates a reliable validation of the proposed model’s practicality and effectiveness. Furthermore, in terms of other damage types, detailed descriptions of this damage may require more parameters. In addition, to enhance the systematic and efficient generation of damaged GW data, employing the slot cut (i.e., crack-like defect) as the damage shape permits rigorous and pointwise assessment of model’s predictive accuracy while avoiding the many additional parameters required to fully describe other irregular or complex defects. In this study, particularly, the damage type is modeled as a surface slot cut extending across the entire beam cross-sectional width. The surface cracks with varying depths and locations are introduced into different beam models to generate diverse damage cases. An example of surface crack in an isotropic beam is illustrated in Figure 7(a), where Loc, Wid and Dep is the crack location from excitation, crack width along beam length direction and crack depth from the top beam surface, respectively. Crack simulation is achieved using element deletion method, a straightforward damage generation approach that requires no complex modifications. 63 This method involves applying a damage coefficient to the corresponding element mass matrix and/or stiffness matrix, effectively reducing the element stress close to zero, resulting in strong discontinuities 63 :


where
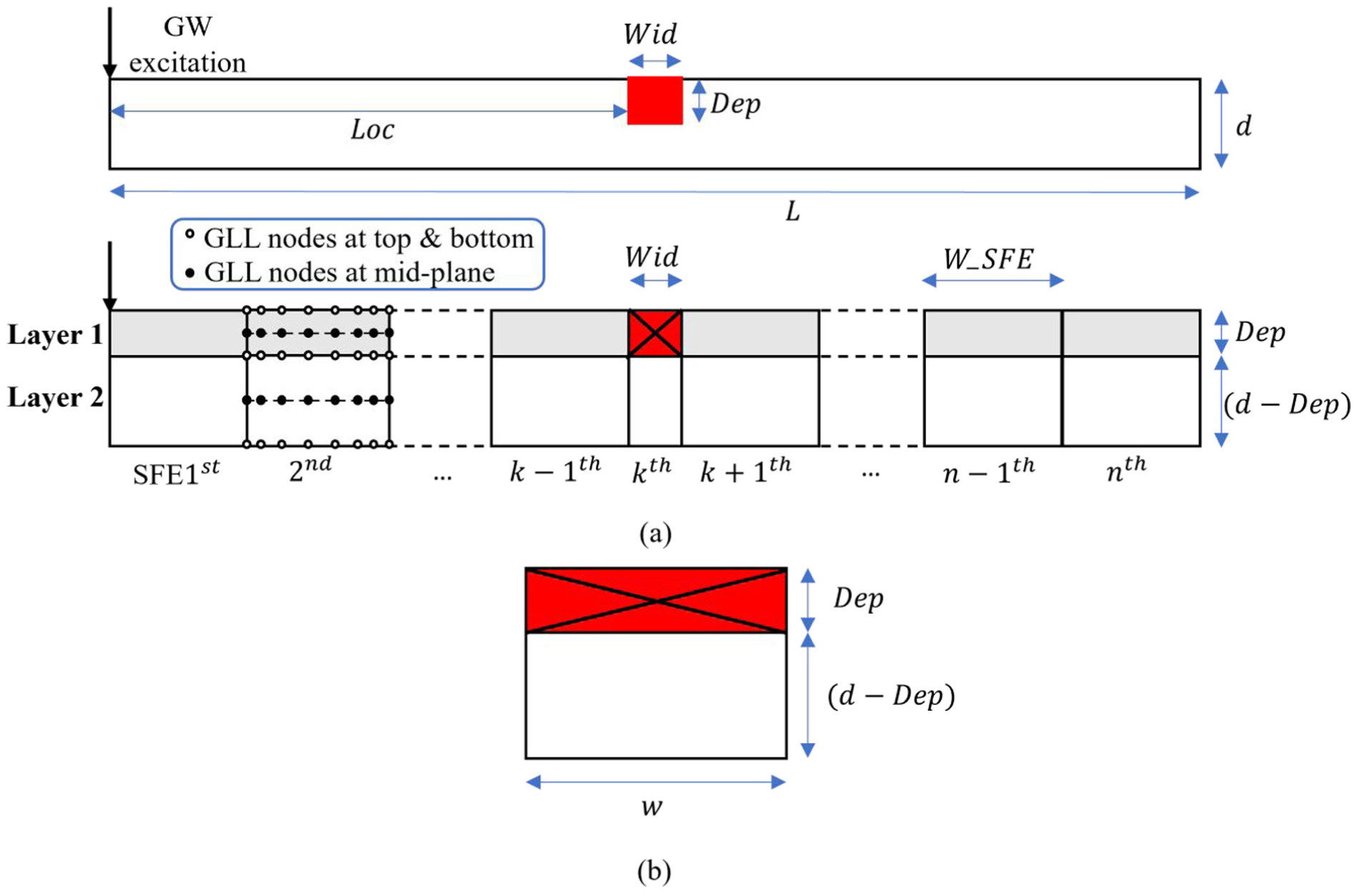
(a) Surface crack simulation using HOBM with SFEs and GLL nodes, where the beam is separated into two sublayers of varying thicknesses, and (b) cross-sectional view of the isotropic beam model at damage location, with cross sectional width w. HOBM: higher-order beam model; SFE: spectral finite element; GLL: Gauss–Lobatto–Legendre.
As shown in Figure 7(a) and (b), the isotropic beam is simulated by dividing it into two sub-layers with varying thicknesses, based on the crack depth. In the HOBM simulation, n SFEs are employed, with the surface crack represented by a single SFE of crack width, Wid (the red rectangle with a cross in Figure 7). The remaining intact SFEs have a constant width of
Damage cases
The proposed HOBM was used to simulate different damage cases. In this study, all considered beams were assumed to be sufficiently long so that no boundary reflection from both ends, while the potential crack location was constrained to an 800-mm region representing an inaccessible inspection zone. The potential crack depth was assumed to be between 10 and 50% of the total beam thickness. The width of crack was assumed to be 2 mm in all damage cases, and hence, two damage parameters need to be identified. The excitation signal was at 100 mm away from the possible damage location range, which is from 100 to 900 mm as shown in Figure 8, and measurement point was selected 50 mm from excitation point. The asymmetrical mode (A0) GW is excited by using a 60-kHz central frequency Hann-windowed sinusoidal tone burst pulse with six cycles. Both crack width and excitation frequency were determined based on actual experiment condition (see the fifth section). To optimize computational efficiency, 100 mm absorbing regions with an exponentially increasing damping profile were implemented at both beam ends.64,65 This configuration results in a the total length of 1200 mm (see Figure 8). The damping coefficient within the absorbing regions is defined by64,65:

where
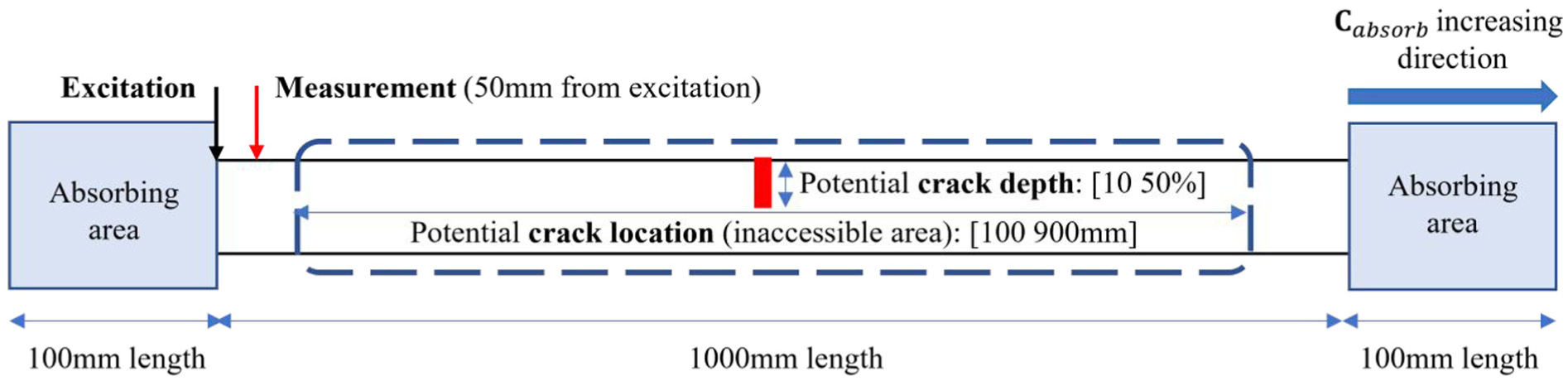
Schematical diagram of the beam model with absorbing areas.
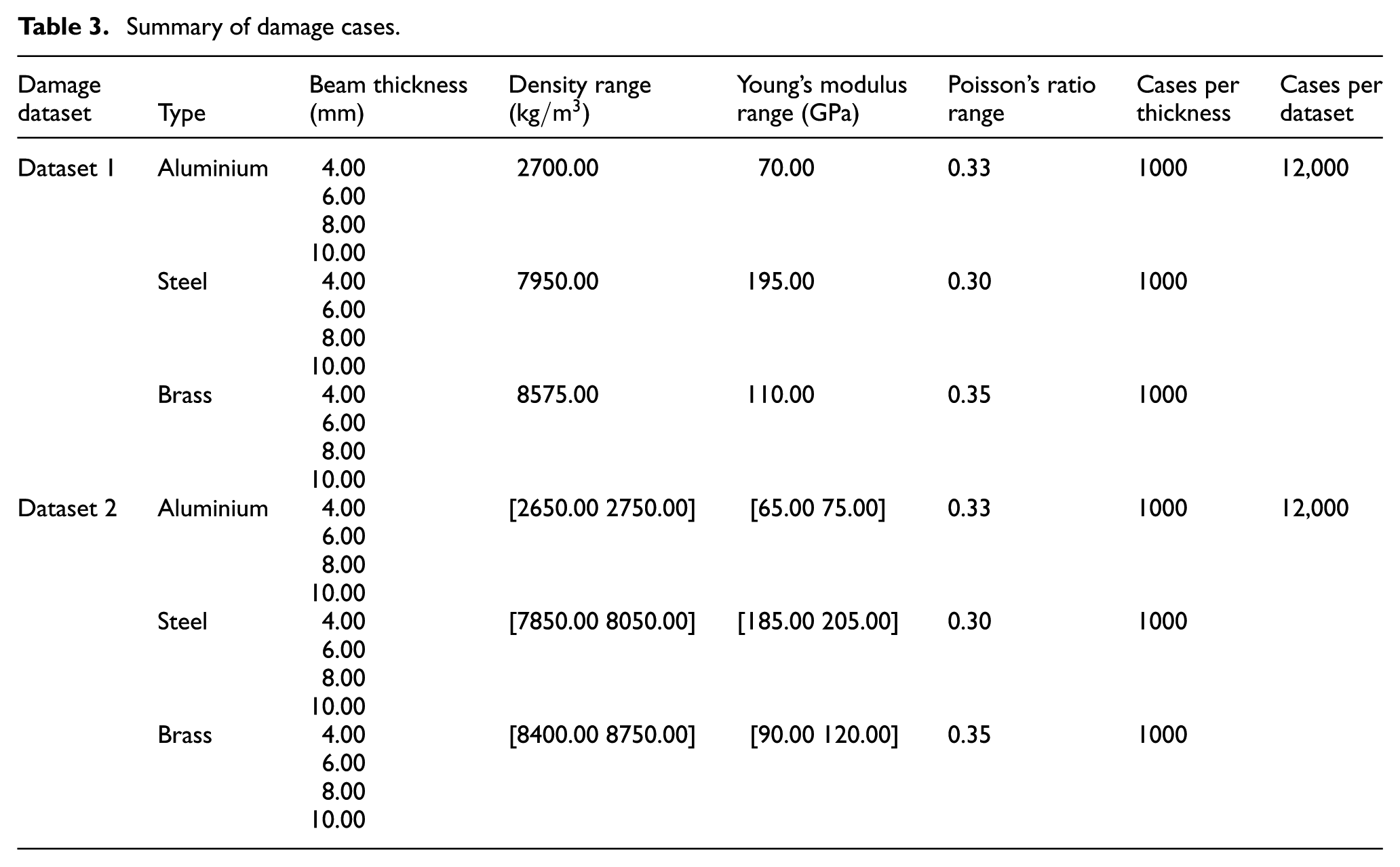
Two damage datasets were generated from different case studies (see the fourth section). In terms of beam configuration, three different materials, steel, brass and aluminium, were considered in the feasibility study of the generalized framework. Additionally, four different beam thicknesses – 4.00, 6.00, 8.00 and 10.00 mm – were considered to assess the applicability and generalizability of the developed framework. This resulted in a total of twelve unique beam configurations. The first dataset was generated using standard material properties to create 1000 random damage cases for each beam configuration, yielding a total of 12,000 damage scenarios. The second dataset incorporated material uncertainties to account for real-world variability. Due to variations in material grades, manufacturing inconsistencies (material) and temperature effects, material properties, especially density ρ and Young’s modulus E, can vary even for the same type/grade of material. Apart from material uncertainties, fabrication processes can also introduce geometric uncertainties (e.g., local width/thickness tapers, mild out-of-straightness or surface waviness). Such geometry-induced deviations may change GW characteristics and may, in turn, influence data-driven damage detection. However, it may be more difficult or impractical to account for all forms of uncertainties. In addition, adapting the beam model for each geometric variation is more complex and challenging. Therefore, the uncertainties of dataset 2 in this study focus on material property variations, which provide representative and comprehensive damage scenarios for evaluating the generalization ability of the proposed framework. Both inputs of ρ and E thereby were uniformly sampled from predefined ranges for each material to consider these uncertainties. Poisson’s ratio remained fixed for each material type due to its relatively stable nature. The material properties and beam configuration in both datasets are summarized in Table 3.
Summary of damage cases.
To validate the accuracy and efficiency of the proposed HOBM, the commercial FE software ABAQUS was used to simulate GW propagation. An isotropic beam was modeled with a length of 1000 mm, a depth of 8.00 mm and a width of 12.00 mm using three-dimensional (3D) solid elements. A 3.00-mm deep crack (37.50% of beam thickness) was located 400 mm from the excitation location. Steel material properties in dataset 1 of Table 2 were used. The mesh dimension was
A screenshot of the ABAQUS 3D finite element method (FEM) simulation is shown in Figure 9(a) and the GW reflection signals at the same measurement point from both HBOM and ABAQUS simulation were displayed in Figure 9(b). It should be noted that no absorbing area was considered in the simulation. Despite the complexity of the damage reflections, the results show a good agreement between the HBOM and ABAQUS, indicating the accuracy of HOBM. Moreover, under the same system processer (Intel(R) Core (TM) i7-10700 CPU 2.90 GHz with 16.0 GB RAM), the HOBM required only 31.90 s to generate field outputs (i.e., displacements at all considered nodes). In contrast, the ABAQUS 3D FEM simulation took over 9345.60 CPU seconds to generate history outputs (i.e., only at the selected measurement node). The computational efficiency of HOBM can be further improved by incorporating MATLAB parallel computation.
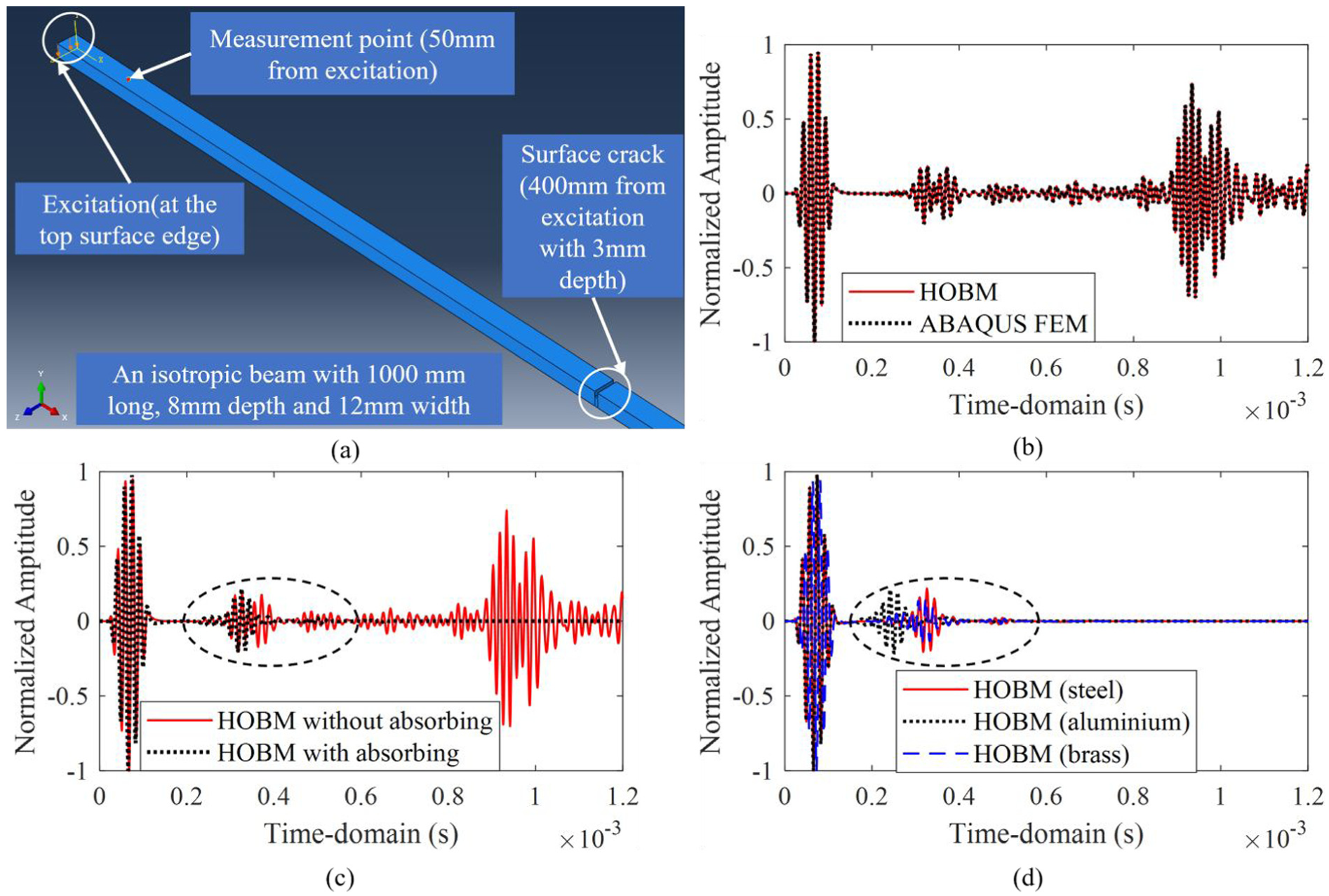
(a) A damage scenario simulated using ABAQUS 3D FEM, (b) GW reflection signals comparison between HOBM and ABAQUS 3D FEM without absorbing areas, (c) GW reflection signals at the same measurement point for beam with and without absorbing areas and (d) GW reflection signals of beams with the same damage scenario but different materials. GW: guided wave; HOBM: higher-order beam model.
Figure 9(c) demonstrates the effectiveness of the absorbing area implemented in HOBM, showing significantly reduced reflection complexity through successful elimination of boundary reflections. This approach provides notable computation advantages by removing the requirement for impractically modeling long beam to migrate the boundary reflections. Figure 9(d) shows the signal comparisons between different standard materials under the identical damage condition. Despite they have identical beam geometry and damage properties, wave characteristics vary between different materials. It is observed that both excitation pulses and damage reflection pulses exhibit diverse trends, presenting a significant challenge in identifying damage parameters across different beam models when using a single neural network.
Generalization approach implementation for different beam-like structures
Several numerical cases studies were conducted to investigate the performance of the developed MC-SE-BiH algorithm for generalization damage identification. Initially, the generalization ability of the proposed approach was tested in three scenarios with increasing detection difficulty on case study 1. In this case study, a comparison was made with several conventional representative models: three are based on individual CNN, LSTM, and GRU, and the other two are using integrating algorithms, CNN-LSTM and CNN-GRU, which utilize a grid search strategy, 66 to optimize their hyperparameters, rather than relying on artificial empirical selection. Furthermore, case study 2 examined the broader generalization performance of developed network for material uncertainties caused by variations in material grades, manufacturing inconsistencies and temperature effects. Finally, case study 3 investigated the robustness of the proposed framework to randomly varying noise and measurement error. Beyond the core objectives of this article (i.e., accessing generalization concept and feasibility), Case study 4 was designed as an exploratory extension to probe the framework’s behavioral boundaries (i.e., performance ceiling) under unseen structural configurations that were intentionally outside the training/validation distribution. Therefore, the case study 4 is only an exploratory probe rather than a confirmatory evaluation.
Case study 1: comparative analysis of DL frameworks for generalization performance
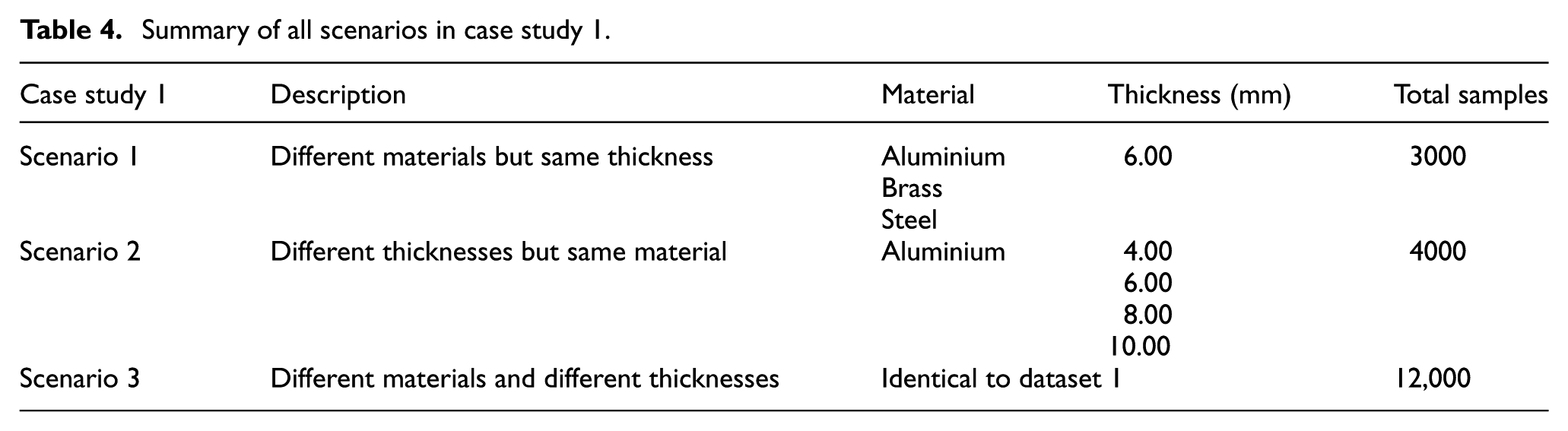
This section evaluates the generalization capability of various DL-based models for damage detection across diverse beam-like structures using dataset 1 (without material uncertainties). We examine three progressively challenging scenarios to systematically assess diagnostic performance involving differences in dimensions and materials, that is, (i) different materials with identical thickness, (ii) different thicknesses with identical material, and (iii) different materials and different thicknesses. This article mainly focuses on training a model that can be applied to a variety of different beam-like structures, so the datasets in the first two scenarios can be used as subtraining datasets in the third scenario of case study 1. Table 4 summarizes all scenarios in case study 1. To ensure a fair comparison, all approaches used in this case study have the same configurations (network backbone) and training strategies except for their own optimal hyperparameters. Since the datasets used for training vary in different scenarios, the hyperparameters for other considered models are determined case by case.
Summary of all scenarios in case study 1.
The evaluation results of the proposed framework, along with other considered models in case study 1, are summarized in Table 5. As observed, the proposed MC-SE-BiH exhibits the lowest RMSE and MAPE, as well as best goodness of fit (i.e., highest R2), for each scenario of case study 1. This demonstrates the superior predictive performance of MC-SE-BiH in estimating both damage location and depth percentage compared to other considered models.
Summary of the evaluation results of the proposed MC-SE-BiH along with other considered models in case study 1.
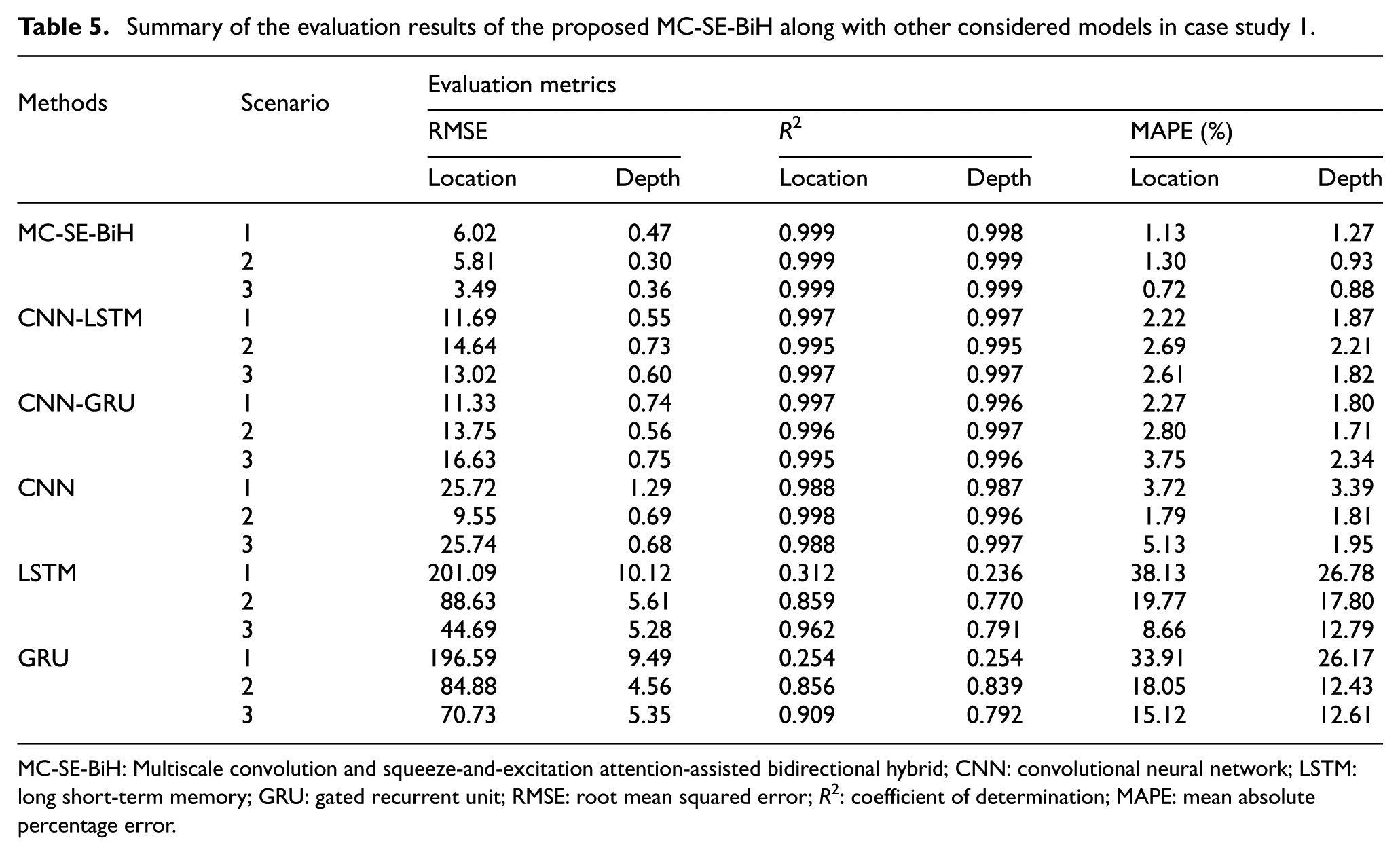
MC-SE-BiH: Multiscale convolution and squeeze-and-excitation attention-assisted bidirectional hybrid; CNN: convolutional neural network; LSTM: long short-term memory; GRU: gated recurrent unit; RMSE: root mean squared error; R2: coefficient of determination; MAPE: mean absolute percentage error.
In contrast, individual LSTM and GRU struggle to adapt to the complexity of the damage detection scenarios investigated in this article. This is particularly evident in scenario 1, where both models failed to detect damage, posing significant challenges for achieving generalization. Specifically, the R2 values for both models remain below 0.400 in this scenario, accompanied by substantial RMSE and MAPE values. Although RNN model such as LSTM or GRU excel at extracting features from temporal sequences, GW signals inherently contain both temporal and spatial characteristics. The considerable variations in GW signals across different structures, often manifesting as nonlinear relationships, and their susceptibility to be confused with each other under certain damage conditions, further affect the distinguishability of information from GW signals. Additionally, the input data is a raw GW signal without any prior signal processing, resulting in high-dimensional input features. As a result, individual LSTM and GRU demonstrate limited effectiveness in isolating and leveraging key features from the input data, resulting in suboptimal performance.
While CNN showed relatively better performance in the first two scenarios, its performance in the third scenario is inadequate. Notably, the relatively good performance of the integrated algorithms, CNN-LSTM and CNN-GRU, is expected and reasonable, as the developed methodology represents an improvement and enhancement built upon the foundational principles of these two approaches by integrating multiscale convolution, channel attention mechanisms, and bidirectional RNNs. Despite the fact that both integrated algorithms achieved good prediction results, their training loss exhibits local marked fluctuations after convergence due to instability in the network during feature extraction, as evidenced by the training loss curves in Figure 10. The results demonstrate that the proposed MC-SE-BiH algorithm more effectively interpret, distil, and learn the information from GW signals, thereby establishing an effective mapping between the GW time-domain signals and damage parameters. The predicted results of the proposed MC-SE-BiH for beam-like structures with different materials and thicknesses are visualized using scattering plots in Figure 12(a). The predicted values closely align with the perfect agreement line, further demonstrating that the strong generalization ability of the proposed approach. The Appendix A (Figures A1 to A6) in this article presents an additional detailed evaluation of several different DL approaches for damage identification in case study 1, featuring predicted-versus-ground-truth scatter plots to facilitate direct and clear comparability. Furthermore, to enhance the interpretation of the physical significance, representative visualizations are provided, aiming to the discoverability and presentation of different models for prediction. In particular, a representative example is presented to examine the identification performance of each model under the scenario 3. The visualization of prediction results adopts a physical representation, as illustrated in Figure 11, where positions and dimensions are all expressed as relative relationships. For damage location prediction, models achieving superior performance exhibit predictions that are spatially closer to the actual damage site. Similarly, for damage depth estimation, the accuracy of a model improves as its predicted depth percentage approaches the true damage depth. It is noteworthy that, the GW time-domain signal corresponding to the worst positional estimation of the proposed approach within the testing dataset is employed to evaluate all other considered models for comparison from a physical perspective. It can be observed that even for the testing instance exhibiting the weakest performance, the proposed model still outperforms alternative models in predictive accuracy.
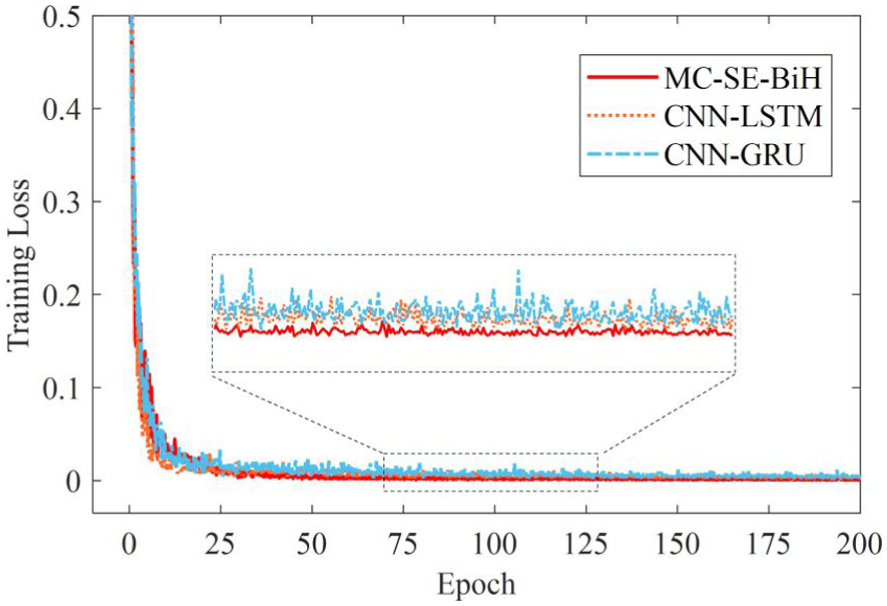
Training loss curves of the proposed MC-SE-BiH, CNN-LSTM, and CNN-GRU for damage detection in scenario 3. MC-SE-BiH: multiscale convolution and squeeze-and-excitation attention-assisted bidirectional hybrid; CNN: convolutional neural network; LSTM: long short-term memory; GRU: gated recurrent unit.
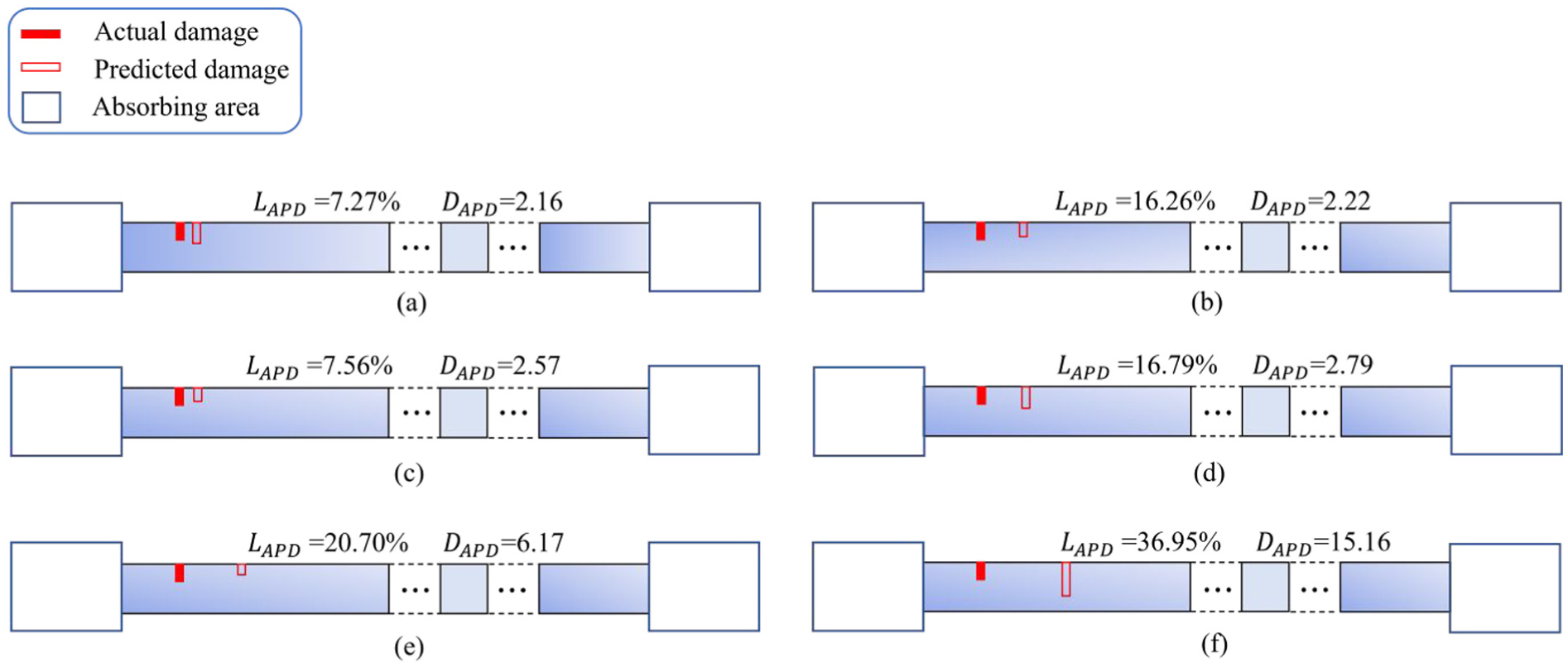
Identification results of different models on the worst estimation from the proposed approach for testing dataset in the scenario 3: (a) MC-SE-BiH, (b) CNN-LSTM, (c) CNN-GRU, (d) CNN, (e) LSTM and (f) GRU. Note: APD is the absolute percentage difference for crack location
In summary, the case study 1 focuses on evaluating the generalization performance of the proposed MC-SE-BiH and other considered models in detecting damage under three distinct scenarios, enabling a comprehensive comparative analysis. The proposed framework demonstrates a remarkable ability in addressing the challenge of generalizing damage identification in GW-based damage detection using DL techniques. Unlike the approaches used for comparison in this section, which show varying performance limitations, the proposed MC-SE-BiH algorithm achieves superior generalization performance for damage identification across different beam-like structures.
Case study 2: performance of the proposed framework under varying material uncertainties
This section investigates the performance of the MC-SE-BiH framework across various beam-like structures subjected to uncertainties such as material grade variations (which encompass all material properties of this alloy series), manufacturing inconsistencies and temperature effects. These uncertainties primarily influence the Young’s modulus and density of the materials (see the third section for details). Even among alloy variants with the same material composition, the reflected waves from crack damage exhibit noticeable differences. This underscores the importance of further exploring generalization ability of the proposed method for damage identification across a broader range of beam-like structures.
Dataset 2, incorporating material uncertainty, was used to construct the dataset for this case, totalling 12,000 samples sets. Notably, due to the material properties being uniformly and randomly generated within a specific range (as detailed in the third section), no two samples in dataset 2 share identical material properties. This poses a significant challenge for damage detection tasks, as GW characteristics may exhibit only slight variations within a narrow range of material properties, while the data representing such subtle variations are very limited. Furthermore, the feature distribution of GW signals could be highly uneven, with certain ranges exhibiting a higher concentration of data while others have a comparatively lower density. Despite these challenges, the proposed approach demonstrates superior generalization performance, with exceptional goodness of fit for both damage location (R2 = 0.999) and depth percentage (R2 = 0.997). Additionally, the RMSE and MAPE values for the developed algorithm are only 6.53 and 1.34% for damage location, and 0.61 and 1.73% for damage depth percentage, respectively. The results of the evaluation metrics can be found in Table 6. Figure 12(b) shows the predicted results of the proposed method for identifying damage across different beam-like structures under various material uncertainties. As shown in the scatter plots, nearly all predicted values aligned with or are in close proximity to the perfect agreement line, with only a few outliers.
Results of the proposed MC-SE-BiH for different beam-like structures in case study 2 (from dataset 2) and case study 3 (from dataset 2 after adding noise and signal translation).
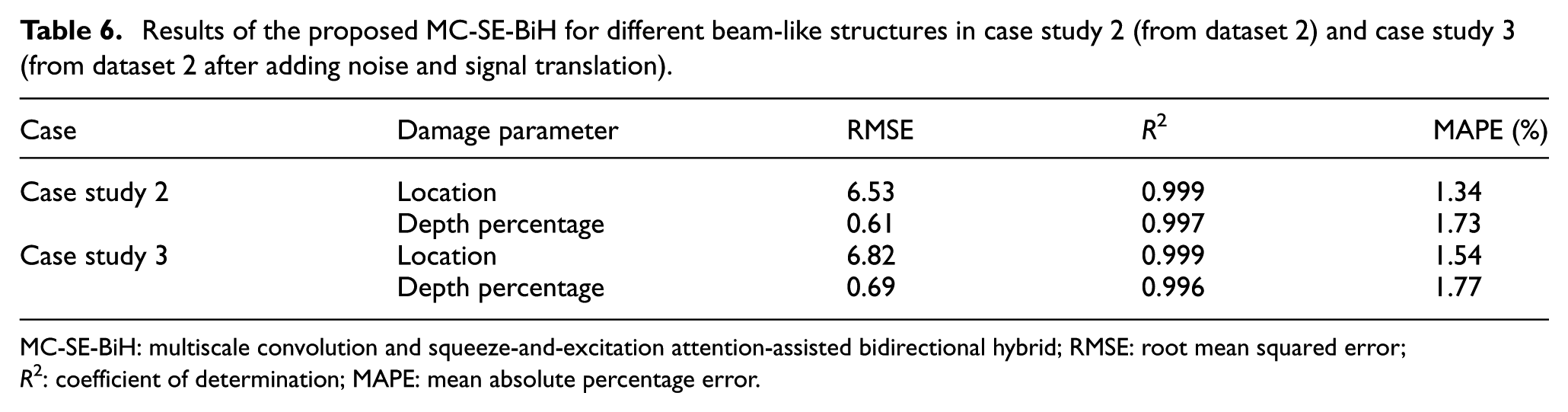
MC-SE-BiH: multiscale convolution and squeeze-and-excitation attention-assisted bidirectional hybrid; RMSE: root mean squared error;R2: coefficient of determination; MAPE: mean absolute percentage error.
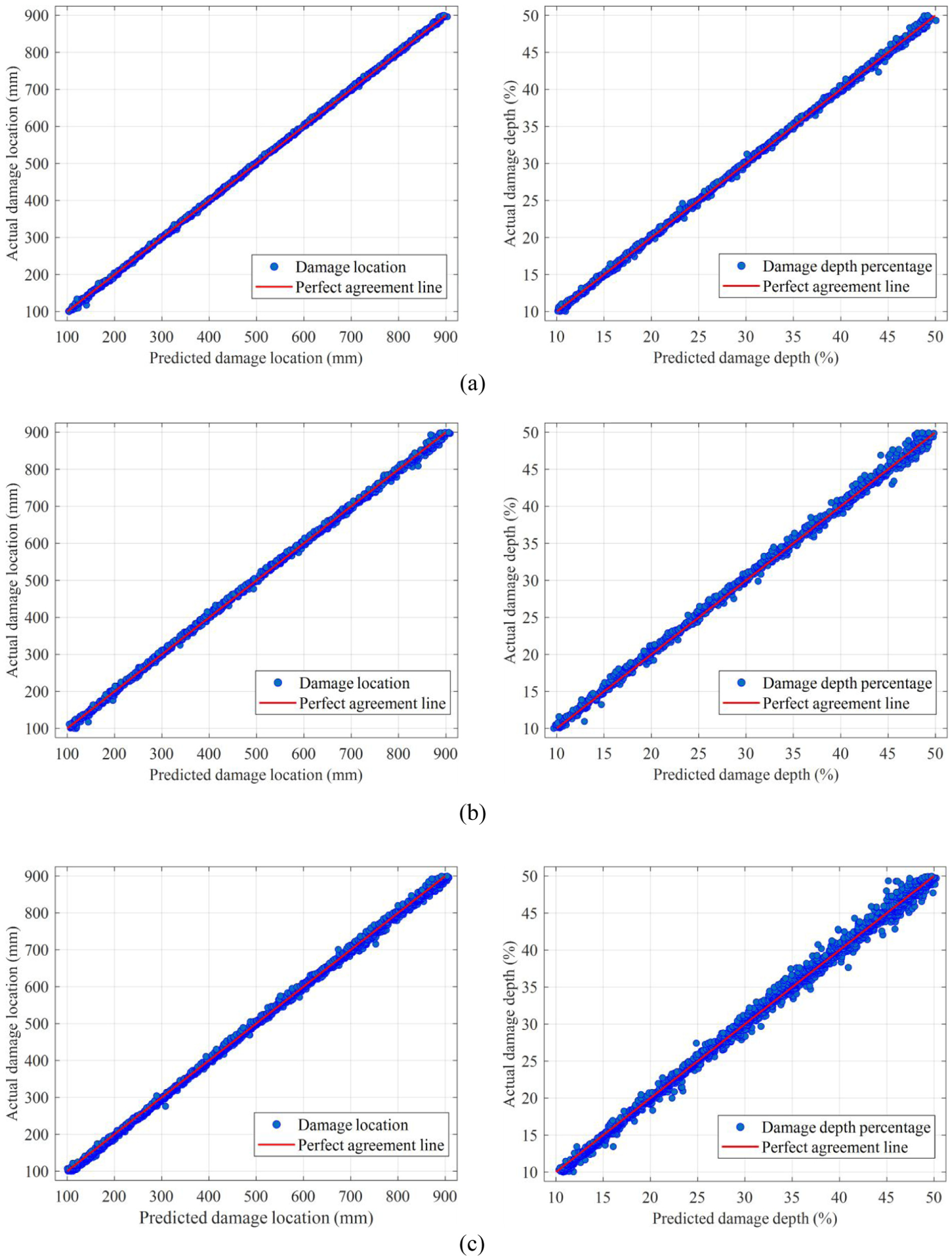
Prediction results of the proposed MC-SE-BiH for damage identification of different beam-like structures under (a) scenario 3 of case study 1, (b) various material uncertainties and (c) various material uncertainties and measurement conditions. MC-SE-BiH: multiscale convolution and squeeze-and-excitation attention assisted bidirectional hybrid.
Case study 3: performance of the proposed framework under different unavoidable noise and measurement errors
This section evaluates the performance of the proposed generalized approach under various measurement conditions, including material errors. Specifically, Gaussian noise is added to simulate the effect of measurement noise. Different signal-to-noise ratios (SNRs) are applied to the GW time-domain signals. To examine the generalization capability of the proposed method across diverse measurement environment scenarios, noise levels, including random and uniform SNR within the range of 30–70 dB, and noise-free conditions, are applied to the all datasets from dataset 2 to simulate GW responses from real beam-like structures. 67
In addition, the inevitable presence of human measurement errors can result in slight positional offsets at the measurement point. To account for this, signal translation, a data augmentation technique, 68 is employed to enhance the GW signals by simulating human measurement errors. The signal translation range extends 5.00 mm forward (positive) or backward (negative) from the original measurement point. To address gaps introduced during the translation process, zero-padding is applied. The dataset for signal translation is derived from the original dataset with added noise. Hence, the total dataset size increases to 24,000. The detailed results of the proposed approach for case study 3 are presented in Table 6. As shown, the proposed approach achieves remarkably low RMSE and MAPE values, along with a high goodness of fit. This further demonstrates the strong robustness of the proposed approach.
Figure 12(c) presents the regression results of the proposed approach in the form of scatter plots. The approach demonstrates superior robustness in localizing and sizing damage (depth percentage). Specifically, for damage localization, nearly all the predicted values closely aligned with the perfect agreement line in the test datasets. Compared with the prediction of damage location, the identification results of damage depth percentage are relatively weak. This is because the considered uncertainties in the case studies have more effect in size detection than location detection. Generally, damage location is based on reflection pulse time of flight (ToF). However, damage sizing is more relying on reflection signal amplitude. In realistic, the GW amplitude can be affected easier than ToF. Moreover, the determination of damage size is largely reflected in the amplitude of GW time-domain signals. The introduction of noise further affects the signal amplitude, making it more challenging to distinguish between similar GW signals and accurately identify the severity of damage. Despite the inclusion of random noise levels and the signal translation operation in dataset 2, which contains samples with various material uncertainties, the proposed generalization approach still delivers strong performance in determining damage depth percentage.
Case study 4: generalization capability of the proposed framework on unseen structural configurations
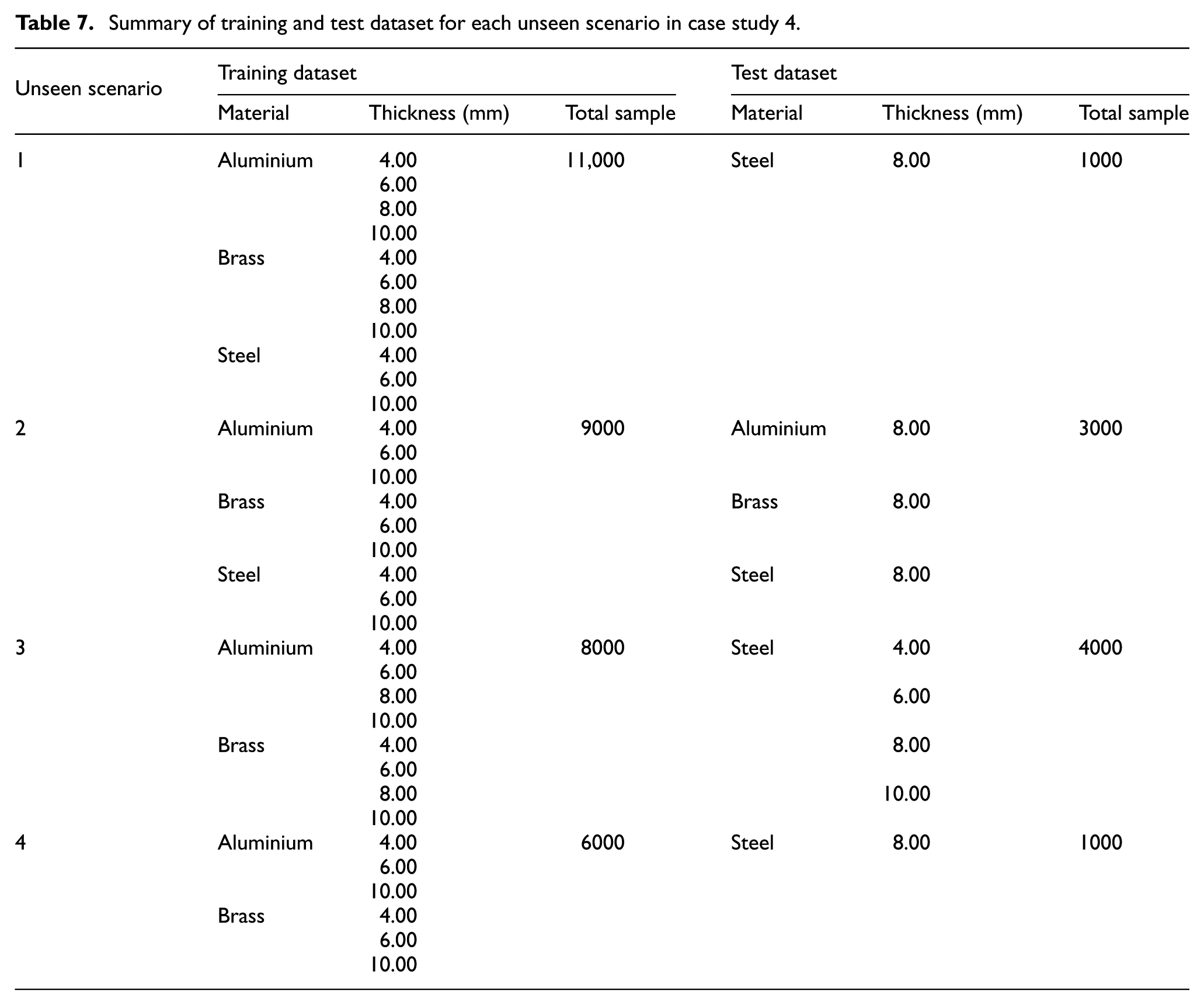
The proposed framework demonstrated exceptional prediction results and robustness in the previous case studies. To further explore the application potential, this section investigates and discusses the performance of the framework when one or more beam models (used to generate training dataset) are removed as unseen beam configurations for testing. The dataset for this generalization capability investigation was derived from dataset 2. A total of twelve HOBM were utilized to generate dataset, with each model incorporating material properties uncertainty. Notably, each HOBM generates 1000 sets of GW signals. To comprehensively evaluate the generalization capability of the proposed approach, a hierarchical evaluation strategy was designed. This section aims to investigate how well the proposed algorithm adapts to different unseen scenarios. The detailed descriptions of these unseen scenarios are as follows: (1) unseen scenario 1: the well-trained MC-SE-BiH did not encounter the data generated by a single HOBM during training; (2) unseen scenario 2: the well-trained MC-SE-BiH did not encounter the data generated by all HOBM with a specific cross-sectional dimension during training; (3) unseen scenario 3: the well-trained MC-SE-BiH did not encounter data generated by all HOBM composed of a specific material during training; (4) unseen scenario 4: the well-trained MC-SE-BiH did not encounter data generated by all HOBM composed of a specific material and those with a specific cross-sectional dimension during training. The training and test dataset for each unseen scenario are summarized in Table 7.
Summary of training and test dataset for each unseen scenario in case study 4.
The same network architecture and training details of the proposed MC-SE-BiH were employed in this case study. To dynamically evaluate proposed MC-SE-BiH performance and guide its optimization during training, the training datasets in Table 6 were split into a training set (90%) and a validation set (10%). The evaluation results of the proposed algorithm on unseen beam data are presented in Table 8. As shown, especially for unseen scenario 1, the identification results of the proposed approach on the unseen beam data, where only one beam configuration is excluded, are notable. In this scenario, the proposed approach achieves the lowest RMSE, MAPE, and the highest goodness of fit, both in localizing damage and sizing its depth percentage. For other unseen scenarios, despite an increase in the number of unseen beam configurations corresponding to a reduction in the training dataset, the proposed approach still performs well in identifying the damage location.
The results of the proposed MC-SE-BiH for damage identification on unseen beam data.
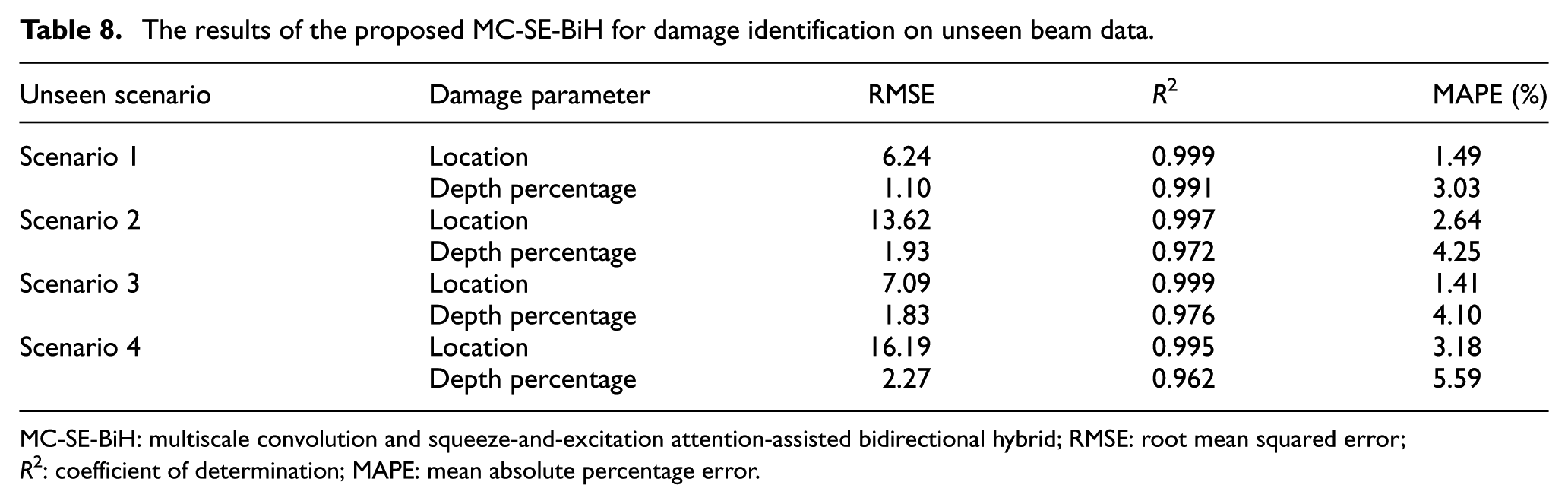
MC-SE-BiH: multiscale convolution and squeeze-and-excitation attention-assisted bidirectional hybrid; RMSE: root mean squared error;R2: coefficient of determination; MAPE: mean absolute percentage error.
Figure 13 presents the detailed prediction results of the proposed MC-SE-BiH for identifying damage parameters on unseen beam data across different unseen scenarios. As indicated by the evaluation metrics, the proposed approach demonstrates good prediction results for localizing damage on unseen beam data across all scenarios. However, the prediction results for damage size are suboptimal in certain scenarios. Particularly, as observed from the identification results in Figure 13(b) to (d), there is a significant deviation between the predicted and actual values for damage depth percentage within a certain range, particularly for unseen scenario 4. In the literature, 27 along with the numerical case studies presented in this study, suggests that GW-based data-driven approaches using DL generally offer more accurate prediction results for damage location parameters than that for size parameters. Furthermore, as designed in the dataset preparation section, no two samples share identical material properties in dataset 2. When extracting unseen beam data for testing the proposed framework in this section, a limited number or lack of critical GW signal samples during training, which is necessary for accurately identifying damage size parameters (i.e., damage depth percentage) on unseen beam data, may occur. Another possible reason for poor prediction performance could be significant differences in feature distributions between training data and unseen test data. Distributional shift between the training data and unseen test data, especially in scenario 4, may have introduced feature patterns not well represented during training. If the feature range or distribution in the training dataset significantly differs from that of the unseen data, the model may fail to effectively learn the relationship. The case study for unseen configuration focuses more on exploring more robust performance of the proposed approach. Generally, in data-driven based damage detection using GW, it is desirable to leverage data from existing or well-characterized structures for model training and detecting damage on these structures. Nevertheless, in these unseen scenarios, the beam models used to generate test data were intentionally removed from the training dataset. For an alternative perspective or potential solution in the future, before applying the proposed approach, additional data from the structures inspected can be used for training (e.g. generating augmentation data for these structures), whereas the specific details require further study.
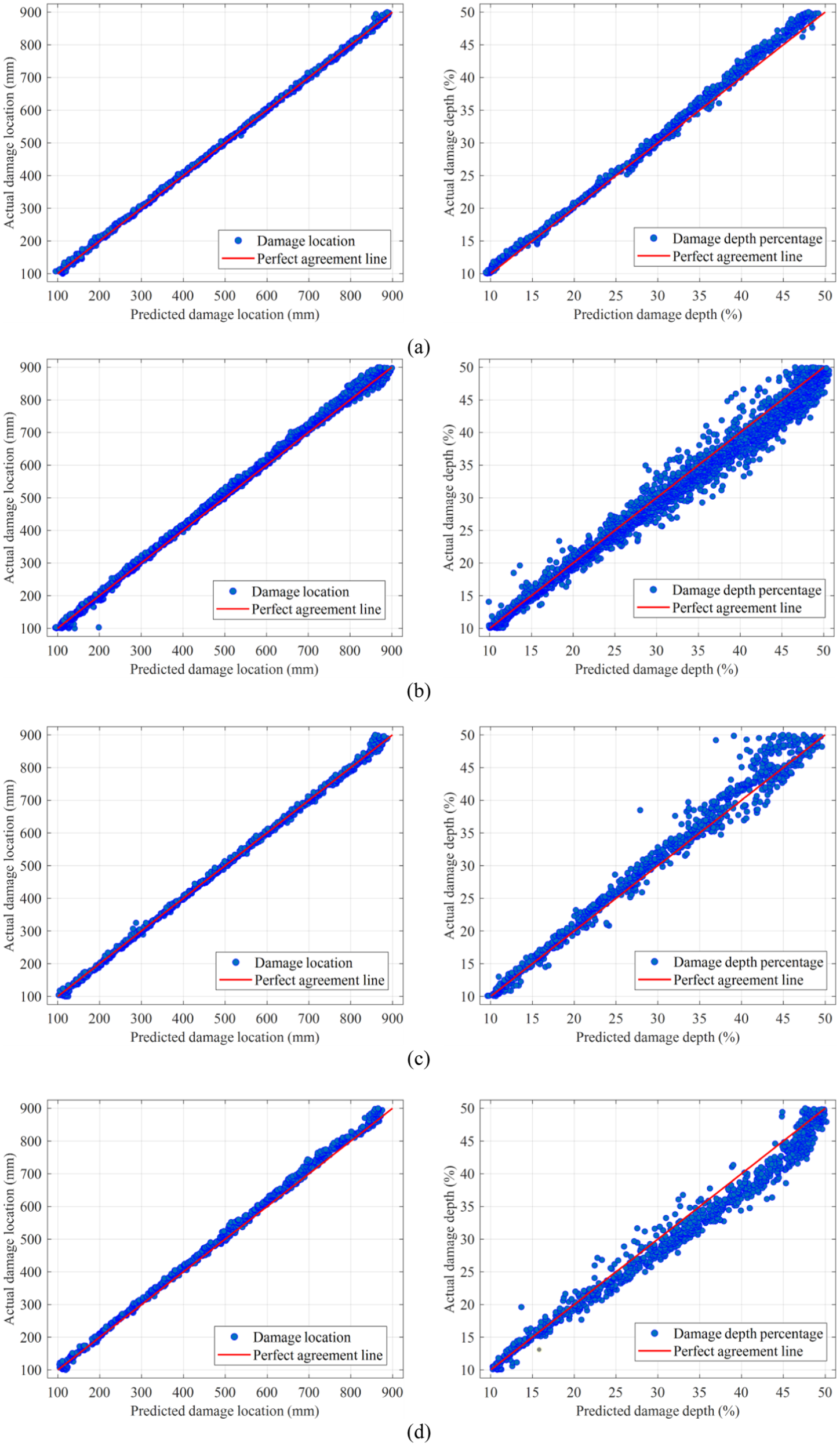
Prediction results of the proposed MC-SE-BiH for unseen beam data under (a) unseen scenario 1, (b) unseen scenario 2, (c) unseen scenario 3 and (d) unseen scenario 4. MC-SE-BiH: multiscale convolution and squeeze-and-excitation attention assisted bidirectional hybrid.
After fulfilling conceptual feasibility of generalizing damage detection in this article, the performance upper limit of the proposed method is preliminarily explored and discussed when the knowledge domain gap is large. In summary, the identification results demonstrate that the proposed approach can generalize damage identification for different beam-like structures and exhibits considerable potential for application on unseen structural configurations. In the application of an automatic GW-based damage detection system, most of the scenarios encountered during damage detection are considered and incorporated into the data preparation within the proposed generalization framework. Consequently, the proposed framework has the potential to generalize damage detection for most situations.
Experimental study
Experimental setup
Beams made of three different materials, with a length of 1000 mm and a width of 12.00 mm, were utilized in the experimental study to further demonstrate and investigate the effectiveness and practicability of the proposed generalized framework. The material properties are summarized in Table 9. These values are idealized, but actual properties may differ. Additionally, it is also noteworthy that crack-like flaws were generated by artificial cutting, which may introduce manufacturing errors.
Material properties of each type of beam-like structure in experimental study.

To facilitate measurement, the experimental beam was placed on rigid supports. A rectangular piezoceramic transducer (PZT) with size
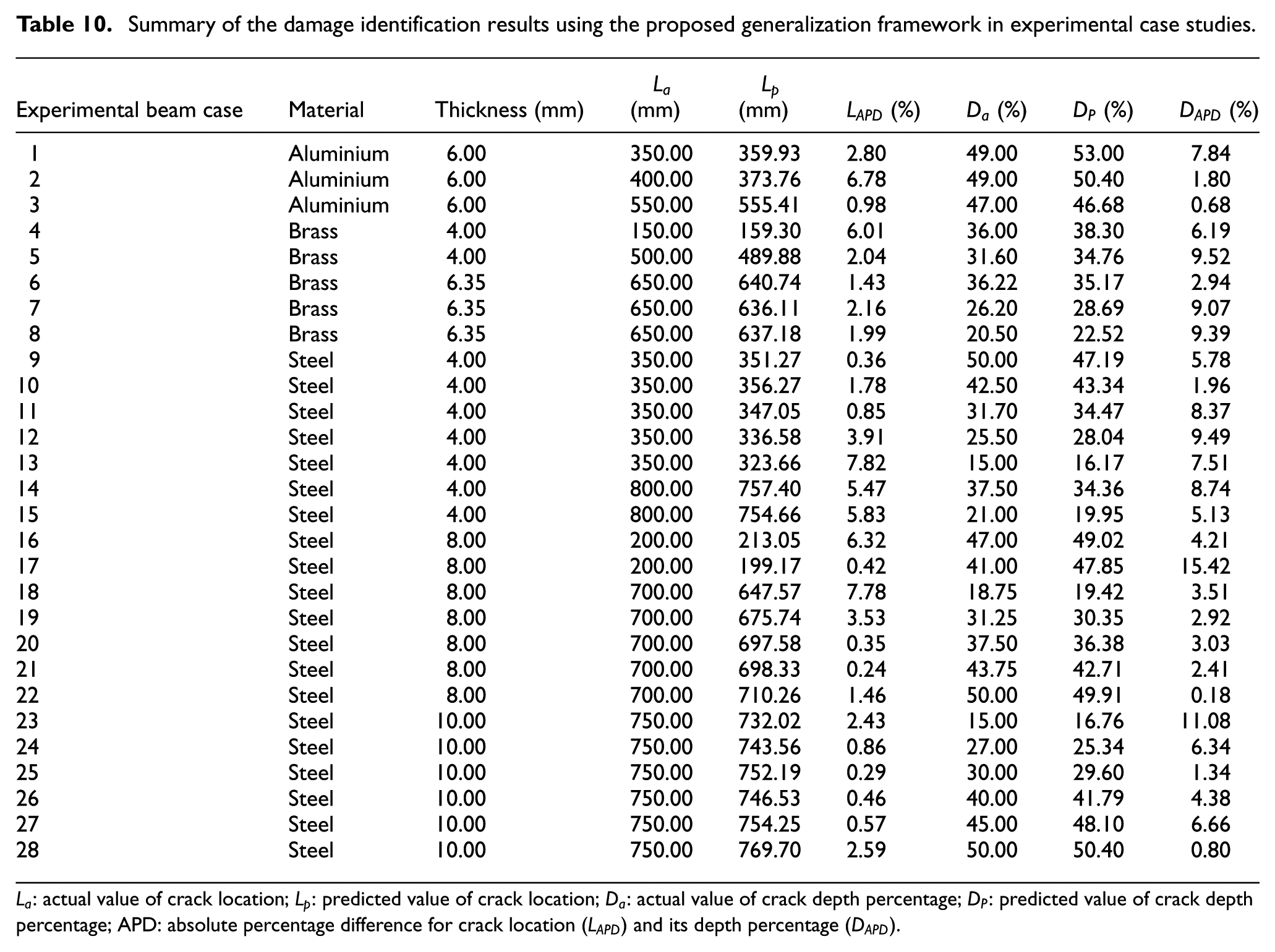
A signal generator, National Instrument PXIE-5412 (Austin, TX, USA), was used to generate the excitation signal, which was synthetized and controlled by a computer (PC). The excitation signal was then amplified by a CIPRIAN HVA-400 amplifier (Saint-Ismier, Isère, France) before being applied to the PZT. Transverse (out-of-plane) displacements at the measurement point were recorded using a 1D Polytec PSV-400 laser Doppler vibrometer (Waldbronn, Baden-Württemberg, Germany), with a controlling system OFV5000. The data were subsequently transmitted to the computer for analysis through the data acquisition unit. The measurement point was positioned 50 mm away from the PZT to maintain the same configuration as in the numerical simulation. Signal averaging (500 times) and a band-pass filter were utilized to further reduce the influence of environmental noise on the GW signals. A detailed flowchart of experimental setup is shown in Figure 14. Details on the crack damage for the experimental beam cases can be found in Figure 15 and Table 10.
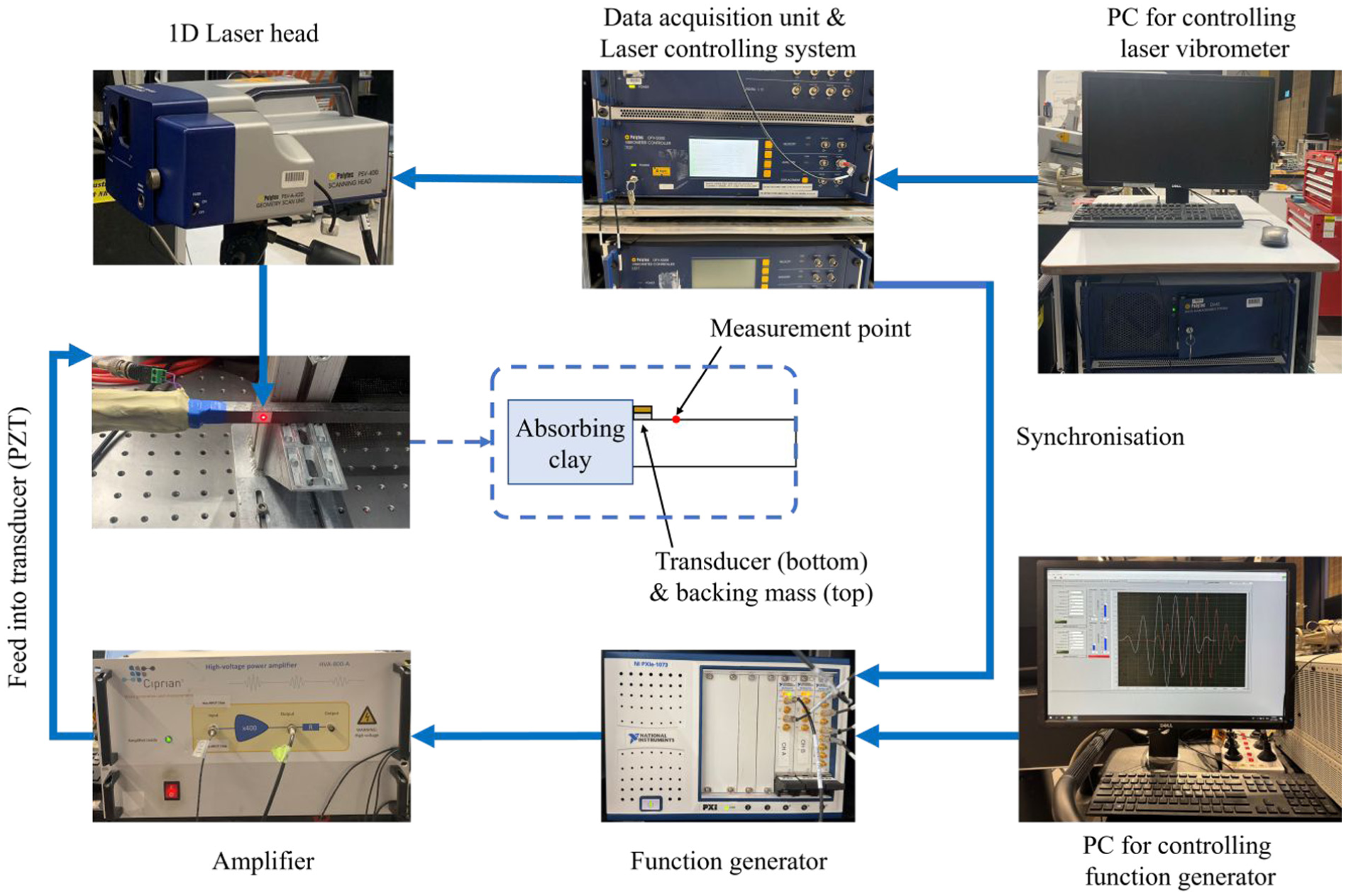
Schematic diagram of the experimental setup for GW excitation using PZT and measurement using 1D laser vibrometer. GW: guided wave; 1D: one dimensional; PZT: piezoceramic transducer.
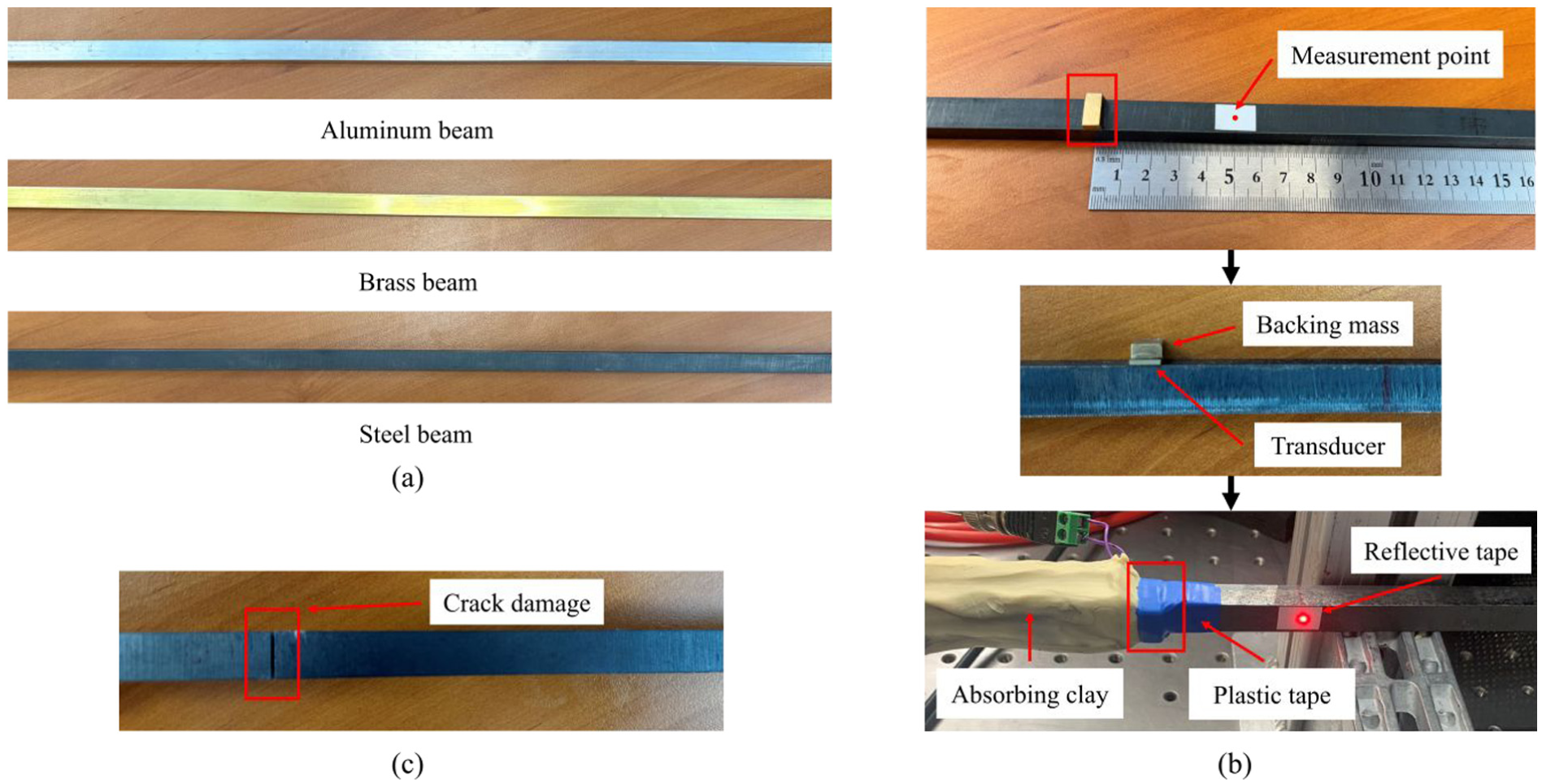
Details of the (a) three intact beams composed of different materials (aluminium, brass, and steel), (b) PZT installation and measurement point and (c) zoom-in of the crack damage in one of steel beams. PZT: piezoceramic transducer.
Summary of the damage identification results using the proposed generalization framework in experimental case studies.
Results and discussion
The experimental data underwent a preprocessing flow identical to that used for the simulated data to maintain consistency with the numerical cases. Specifically, the obtained GW signals were truncated to the same time window as the numerical case study. Normalization was then used to scale each signal to a [−1, 1] range. Finally, the normalized GW signals were interpolated to match feature input requirement (i.e., 4000 points) of the model. Damage identification was automatically implemented using the trained MC-SE-BiH framework from case study 3 (see the fourth section), without further fine-tuning or retraining. Both damage parameters (i.e., crack location and depth percentage) were accurately identified in most experimental beam cases. Table 10 summarizes the prediction results for the experimental beam cases using the proposed generalization framework. The absolute percentage difference (APD) for each experimental beam was calculated using the following equation, which quantifies the relative difference between the actual and predicted value 27 :

where A represents the actual damage parameter, P represents the predicted damage parameter, and
The identification results of crack damage parameters are clearly illustrated in Figure 16 using bar plots. As shown, most of the crack damage parameters were accurately identified in experimental beam cases. Although an additional set of unseen brass specimens with a thickness of 6.35 mm was used for damage identification in this experiment study, the proposed generalization framework is also capable of identifying damage parameters in these beam cases. The results not only validate the practicality and effectiveness of the proposed generalization framework for real-world damage detection but also highlight its significant potential for identifying damage in unseen structural configurations. During the training process, the proposed MC-SE-BiH framework encountered data generated from the HOBM composed of brass components with a 6.00-mm thickness, which is similar in cross-sectional dimension to the experimental brass beams. Given the minor difference in thickness between beam of 6.00 mm thickness and that of 6.35 mm thickness, the characteristics of GW responses may fall within the range of training data, and there is more data with similar features. Consequently, the proposed framework performs well on this dataset, which aligns with the expected research objectives of this study. However, in the case of unseen scenario 2 in case study 4 (see the fourth section), the HOBM used for testing has an 8.00-mm thickness, which presents a relatively large difference in cross-sectional dimensions compared the 6.00 or 10.00 mm thicknesses used to generate the training dataset for this unseen scenario. As mentioned, variations in the cross-sectional dimensions of structures significantly affect GW responses. This relatively significant disparity might result in the model failing to establish a more accurate mapping relationship between GW signals and damage parameters for unseen beam data in unseen scenario 2, thereby explaining the relatively poor performance observed.
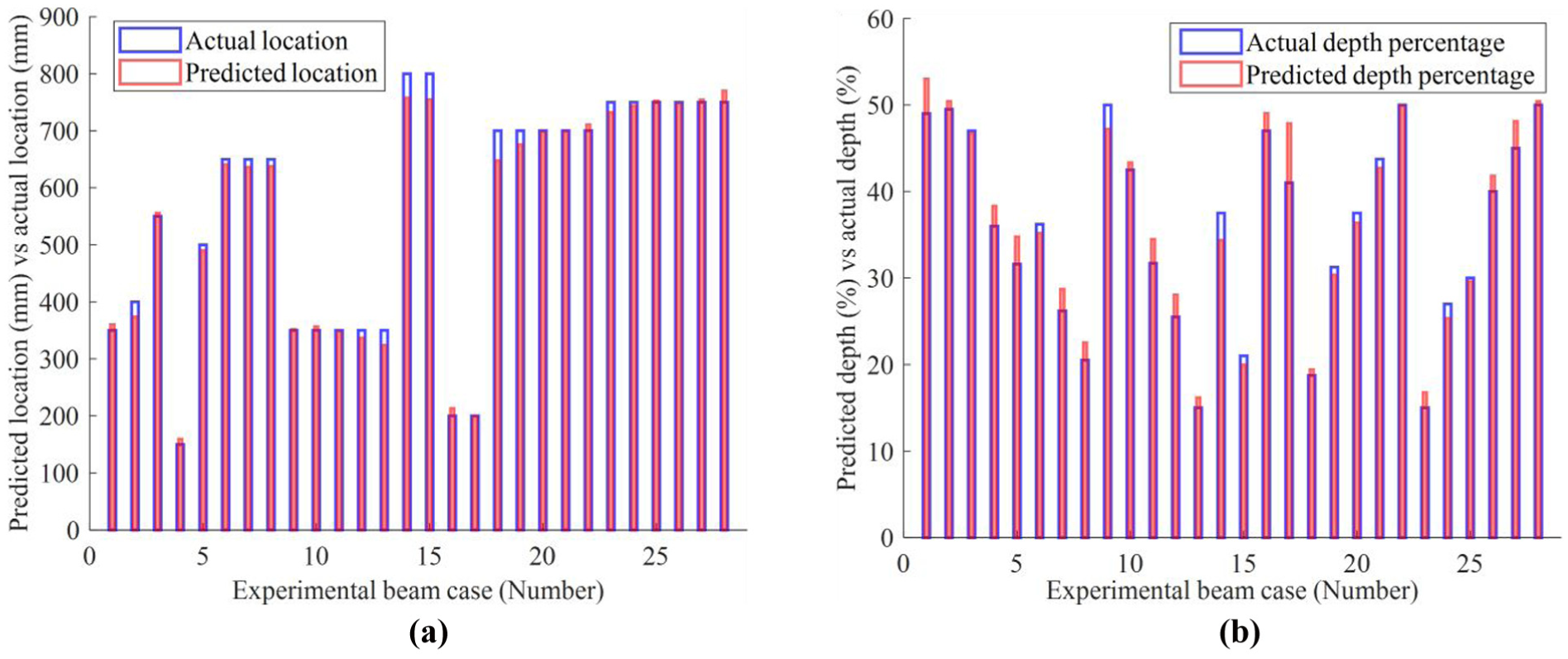
Bar charts of damage identification results for the experimental beam cases (predicted value vs actual value) (a) predicted crack damage location (mm) versus actual crack damage location and (b) predicted crack damage depth percentage versus actual crack damage depth percentage.
During the experiment, artificially introduced cracks (i.e., slot cuts) often deviate from idealized geometries, they typically exhibit surface roughness, slight waviness or minor misalignment, and lack perfect linearity. Consequently, a discrepancy arises between the real cracks presented in experimental beam cases and idealized slot-type cracks assumed in simulation models. In addition, certain factors inherent to the experimental setup and measurement, such as the transducer installation, imperfect coupling between the PZT and beams, the energy attenuation of GW during propagation, the limited absorption capacity of absorbing clay at both ends of the beam, and various measurement errors – introduce unavoidable discrepancies between the experimentally measured GW signals and their simulated counterparts. Therefore, while the prediction performance of the proposed generalization framework for the experimental study exhibits relatively larger APD in a few beam instances compared to its performance on numerical studies, these values remain within an acceptable error range.
Conclusion
This article has proposed a generalization framework for localizing and characterizing damage across various beam-like structures using GW. The proposed MC-SE-BiH algorithm integrates multiscale convolution, channel attention, and bidirectional RNNs, providing powerful feature distillation and interpretation capabilities for entire GW time-domain signal, without the need for traditional GW signal processing techniques. An enhanced HOBM has been employed to efficiently and accurately simulate GW propagation in distinct isotropic beam models. The numerical studies have comprehensively demonstrated the proposed framework significantly outperforms other considered DL-based methods. Furthermore, additional material uncertainties and measurement conditions have been considered in the subsequent case studies. The results indicate that the proposed approach exhibits strong generalization capability and robustness for damage detection across a broader range of beam-like structures. Further research on the performance of the proposed approach with unseen beam configurations has also been presented. The identification results from unseen beam data show that the proposed approach excels at localizing damage and also exhibits potential for characterizing damage. Multiple sets of experimental measurements have further validated the effectiveness and practicality of the proposed generalization framework in the experiment.
While the current approach has shown great potential for generalizing damage detection in different structures, there are still areas for improvement to enhance the practicality of the framework. Specifically, current generalization framework has only been tested on beam-like structures (1D waveguide), although it has the potential to been applied to plates or shells (two-dimensional (2D) waveguide), where the careful consideration of an appropriate measurement design may be necessitated to effectively capture the GW signals. Further research is needed to explore. The current research focuses on a slot cut as the form of damage, whereas different types of damage with more complex profiles can always exist in real-world scenarios, especially in 2D waveguide. The proposed framework can be extended in future work to explore how variations in damage width and spatial profile (e.g., rectangular, Gaussian, or irregular) influence the model’s ability to generalize, which could provide deeper insights into the robustness and applicability of the approach across a wider variety of damage scenarios. Furthermore, during training process, apart from the cross-validation method (i.e., splitting the dataset into training, validating, and testing sets) used in this article, other cross-validation techniques (e.g., k-fold cross-validation) could be potentially considered to further assess model robustness. As DL-based data-driven models capture patterns and nonlinear relationships directly from data without the need for physical modelling, this approach inherently raises potentially concerning issues regarding the lack of insufficient transparency in decision-making (i.e., the black-box nature of such models). Therefore, we will consider interpretable method to find the links between DL model and physical sense in the future, such as local interpretable model-agnostic explanations, SHapley Additive exPlanations, and class activation mapping. In addition, some approaches designed to address such domain-shift issues, such as maximum mean discrepancy or variational domain regularization, which may be a solution to improve the unseen cases which worth further study.
Footnotes
Appendix A
This appendix provides the regression prediction results of different DL frameworks for identifying damage parameters in different beam-like structures (case study 1 in the fourth section) using scatter plots.
Authors’ note
Given his role as an Associate Editor of this journal, Ching Tai Ng had no involvement in the peer-review of articles for which he was an author and had no access to information regarding the peer-review. Full responsibility for the peer-review process for this article was delegated to another Editor of this journal.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The first author would like to acknowledge the scholarship supported by China Scholarship Council.