
Abstract
Most existing data-driven-based methods for structural damage identification are based on black-box models without interpretability and explainability. In this study, a new parallel neural ordinary differential equation-based method is proposed for structural damage identification. The proposed method integrates the state-space equation-based physical model with a network block, which includes a group of parallel neural networks (NNs). The complex structural system is decomposed into physically interpretable subsystems, and each subsystem is represented by an independent NN. The group of parallel NNs is specifically designed to learn residual discrepancies between observed dynamic responses and predictions from the healthy structural system. The proposed approach explores the closed-form expression for a group of parallel NNs to identify the structural parameters, which increases the interpretability and enhances the reliability of the network model. A three-story building structure and a three-dimensional IASC-American Society of Civil Engineer benchmark frame are used to verify the performance of the proposed method. The results show that the proposed method is reliable and accurate to localise and quantify structural damage.
Keywords
Highlights
A parallel neural ordinary differentiation equation-based approach for structural damage identification is proposed.
The neural operator extracts the feature information for structural damage qualification.
Input and output of the neural network are visualised, enhancing its explainability.
Numerical and experimental studies are conducted to verify the approach.
Introduction
Civil infrastructure is deteriorated due to ageing, environmental attacks, operational loading and extreme events. Structural damage identification allows for identifying structural damage location and severity at the early stage, and then the cost-effective maintenance could be conducted timely for structural safety. Vibration-based methods have been used for structural damage detection. 1 These methods could mainly be categorised as model-based and data-driven approaches. 2 Model-based approach relies on a detailed finite element model that accurately reflects the actual structure. A dynamic response sensitivity-based method has been presented for structural damage identification in time domain.3,4 Hou et al. 5 have presented a sparse regularisation technique for structural damage detection. Bayesian model updating has been used for structural damage identification.6,7 Despite great progress made in structural damage localisation and quantification, significant challenges still remain, such as the discrepancy between the numerical model and real structure, operational environmental varieties and the considerable computational efforts required for simulations, especially for the application of complex large-scale structures.
The data-driven approach for structural damage detection, especially machine learning (ML) based methods, has recently attracted the interest of researchers and engineers. 8 Pathirage et al. 9 proposed an autoencoder-based approach to map the relationship between vibration features and structure damage for structural damage qualification. Yu et al. 10 proposed a deep convolutional neural network (NN) to extract high-level features from raw response data for structural damage identification of smart building structures. As the residual NN could avoid the gradient vanishing problem by utlilising skip connections, the deep residual network (ResNet) framework has been used for structural health monitoring. 11 Although ML-based methods have been used to capture the damage-sensitive features from monitoring data, the operational and environmental varieties have a significant impact on the performance of structural damage detection in practice. Entezami 12 presented a state-of-art method for feature extraction in time and time-frequency domains and provided statistical decision-making for damage diagnosis under environmental and operational varieties. A probabilistic damage localisation method was presented using the symmetric information measure. 13 Sarmadi et al. 14 proposed an unsupervised data normalisation to eliminate environmental and operational effects for long-term bridge monitoring. Recently, Wan et al. 15 presented an unsupervised deep learning approach for structural anomaly detection using probabilistic features captured by variational autoencoder. Zhu et al. 16 proposed an attention-guided conditional latent diffusion probabilistic model to capture data patterns under varying environmental conditions for anomaly detection. These data-driven methods based on ML could automatically extract the damage-sensitive feature from the monitoring data based on classification or regression tasks to identify structural damage. Since these methods purely depend on reliable data and NNs to build a ‘black box’ and rapidly learn the complicated relationship between the input and the output of various tasks based on their ability to approximate the arbitrary structure functionality. However, these methods usually lack a physical explanation of their intrinsic mechanisms. 17 Furthermore, in practical application, these methods face challenges due to lack of complete high-quality training data, especially the scarcity of structural damage data and measurement noise.
Physical informed NN integrates the physical knowledge with the ML process to solve the forward and inverse scientific problems. 18 Bao et al. 19 presented a mechanics-informed NN method for structural modal identification using explicit mathematical equations to determine the modes. Lei et al. 20 integrated a physical loss function related to modal sensitivity into a deep-learning network for structural damage identification. As the above, the hybrid model not only takes advantage of the fact that NNs can quickly and accurately fit relationships between input and output data to achieve the task for system identification but also allows the overall the training process to follow informed physical rules to enhance credibility. 21 The integration of physical knowledge into NN architectures enhances the interpretability and physical consistency of the ML-based data-driven approach. Lai et al. 22 proposed the neural ordinary differential equations (NODEs) based method to identify parameters of dynamic systems. Instead of obtaining large amounts of health and damage data for pre-training the NN, the measurement time history data are directly compared with the health condition data generated by the ordinary differential equations (ODEs), which can represent structures in the form of state space equations and have been widely used in simulation for both linear and non-linear modelling tasks.23,24 Most recently, Meng et al. 25 and Shukla et al. 26 embedded the physical knowledge into a group of parallel NNs for increasing computational efficiency and dealing with complex tasks. Within one physical constraint, each NN in this group can be given separate inputs and then trained simultaneously.
In this study, a novel structural damage identification method based on parallel neural ODEs (PNODEs) has been proposed for complex frame structures. The proposed PNODEs framework mainly includes two parts: a physical information term represented the prior knowledge, and a discrepancy term processed by a group of parallel NNs. Each NN was specifically designed to consider responses from a subsection of the structure. Each NN was parallel-solved and spliced together at the same time for solving ODEs. The process is that the NN is used to solve ODEs, learning the discrepancy between prior physical knowledge and the actual structural system. The health state of the structure can be informed as the prior knowledge, and a group of parallel NNs learn the discrepancy through each NN corresponding to each subsection of the structure. Therefore, the priori knowledge and discrepancy terms are then summed to form the whole model, where the discrepancy term can be considered as the damaged part of the structure.
The paper is organised as follows: the theoretical background of NODEs is introduced first, and then the structural damage identification based on PNODEs is explained in the second section. Numerical and experimental studies of a building structure with linear or nonlinear damage were conducted to verify the proposed method in the third and fourth sections. An application for a three-dimensional (3D) IASC-American Society of Civil Engineer (ASCE) benchmark frame is used to further verify the performance of the proposed method in the fifth section. The conclusions are drawn in the sixth section.
Methodology
In this section, the NODEs theory is introduced briefly. Then the key phases and mechanisms of the proposed PNODEs framework are presented, including the data incorporation, prior physical knowledge, the parallel NN block and the damage index.
NODEs theory
Structural dynamic system
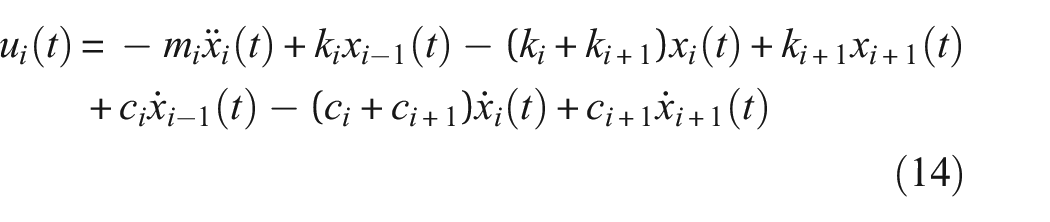
As a priori physical knowledge in this study, the ODE of multiple degrees of freedom (DOFs) systems is expressed as,

where
Equation (1) can be written as state space form as

where
Neural ordinary differential equations
NODEs have garnered significant attention in recent years for a close connection between NNs and ODEs. NODEs could be a continuous equivalent expression of ResNets. The transformation of the hidden state from layer t to (t+1) in ResNets is carried out by a differentiable function

where
Equation (3) can be rewritten as

When

The hidden units of the NNs are parameterised as the ODE form. The data point h0 can be mapped into the set of features to time step t by solving the initial value problems (IVPs) as,

In the actual operation of the structural dynamic problems, there is normally forced excitation instead of the pure IVPs, which informs the priory physical knowledge into NODEs. By adding the excitation force

Solving the continuous dynamic system using a NN
In NODEs, an initial state
where

where
In solving NODEs, the measured data are only required to be given to the network, and the derivative function
Loss function
During the training process of NODEs, the parameters of the NN

where
PNODEs for structural damage identification
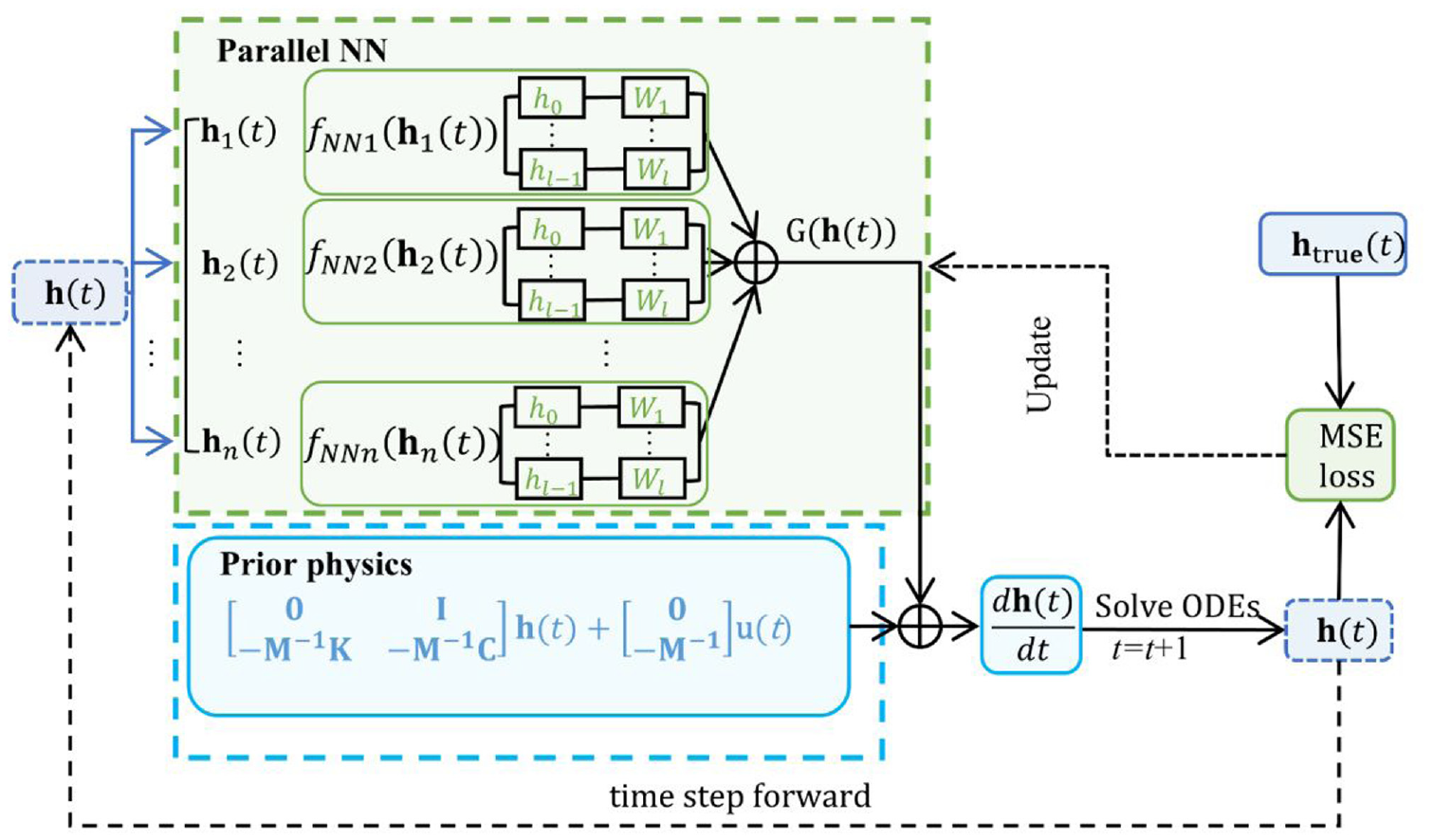
The proposed PNODEs framework is introduced in this section, as shown in Figure 1. The proposed method decomposes a large-scale complex structure into physically interpretable subsystems. Each subsystem is represented by an independent NN specifically designed to learn residual discrepancies between observed structural responses and predictions from an undamaged baseline physical model. The framework mainly includes three phases, for example, data measurement, solving PNODEs and inference of trained NN. In phase I, the limited measured displacement and velocity responses form the state vectors for input of phase II. The prior physical knowledge is integrated into the parallel NNs with supervision of limited measurement data. Each NN is corresponding to a floor of the building structure as a subsystem. Phase III is to apply the trained PNODEs for response prediction and structural damage identification.
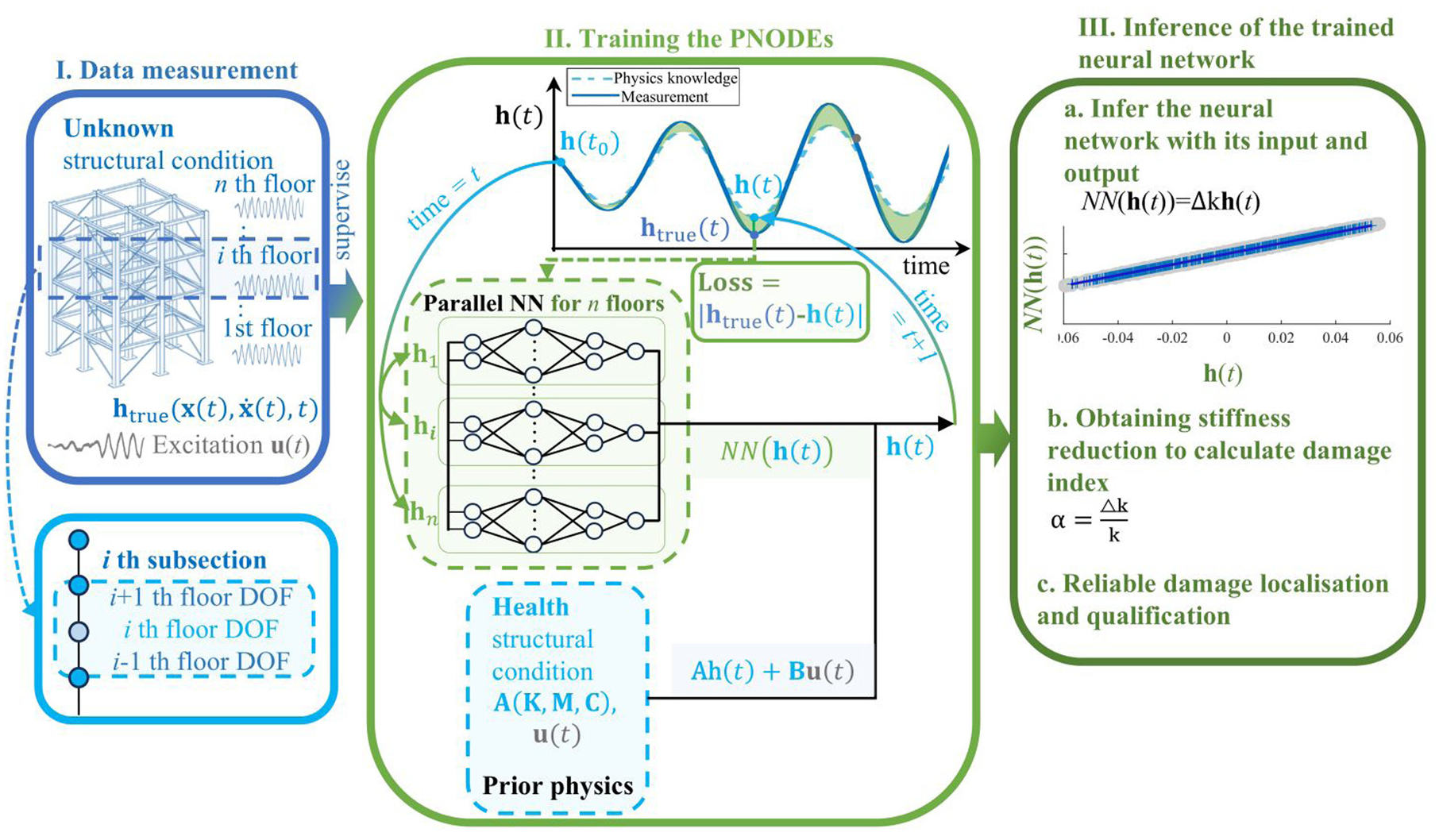
PNODEs framework. PNODE: parallel neural ordinary differential equation.
The proposed PNODE framework can be summarised as follows: (i) By implicitly placing a prior structured dynamical system in a state space form, the general high-performance representation of NNs is used to represent the structural damage by discovering discrepancies between the measured data and a priori system. (ii) Building a set of parallel NNs. Based on the characteristics of the structural dynamics governing equations, each NN is provided with only the measured responses associated with the part of the structure it represents, which allows the discrepancy information to be stored separately in each network corresponding to each part of the structure. The great favour of this parallel NN is that it avoids the whole discrepancy information being stacked in one whole NN, further clearly identifying the source of the discrepancy. (iii) Inference with each of the trained NN as discrepancy, plotting and fitting the inputs and outputs of a NN to discover the latent restore force. Finally, the fitted parameter of the restore force indicating the stiffness change of the relevant section is utilised to localise and quantify damage.
The main contribution of this work can be summarised as (i) Based on PNODES, discrepancy information between the prior physics and real structure is stored in a set of parallel NNs with prior knowledge of the structural dynamics model under health condition (based on ODEs) and the training of network does not require large amounts of measurement data. (ii) Damage localisation is achieved by discovering and separating the discrepancies for each part of the structure, which is corresponding to each NN in the parallel network block. (iii) Damage quantification is performed by observing structural restoring force from the output of each NN and the outputs of NNs further enhance visualisation of results.
Informed priory physical knowledge
In phase II, a simplified numerical model is embedded into the parallel NN as the prior physical knowledge. As shown in Figure 1, this phase consists of a prior physics block (blue block) and a parallel NN block (green block). In the prior physics block, the prior structural physics knowledge can be simplified as multiple DOFs in Equation (1), and it can be expressed in the form of state-space equations.

where

where
Design of the parallel NNs
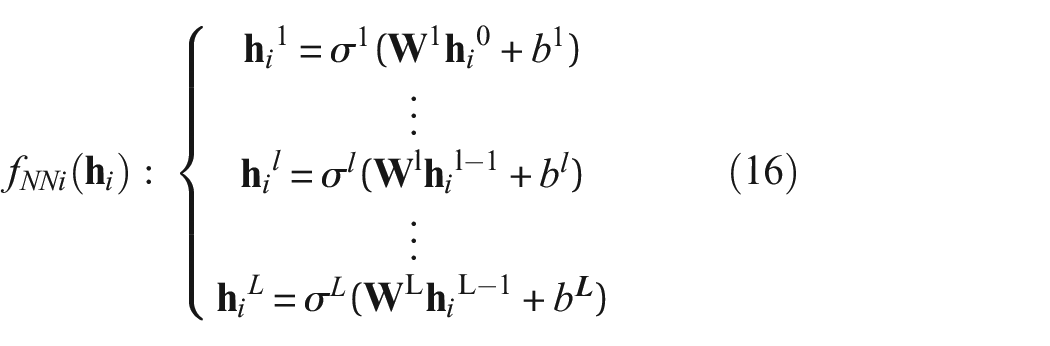
After the displacement and velocity response are measured from the real structure, these responses are formed as a state vector
where
A parallel NN is designed for PNODEs. There are n NNs in the framework and each network represents a subsystem, for example, a floor of the structure. For each time step t, the PNODEs generated a state vector
Solving the ODEs based on the parallel NNs
Details of phase II, architecture of PNODEs is shown in Figure 2. The parallel NN block cooperating with the prior physics knowledge block is to generate
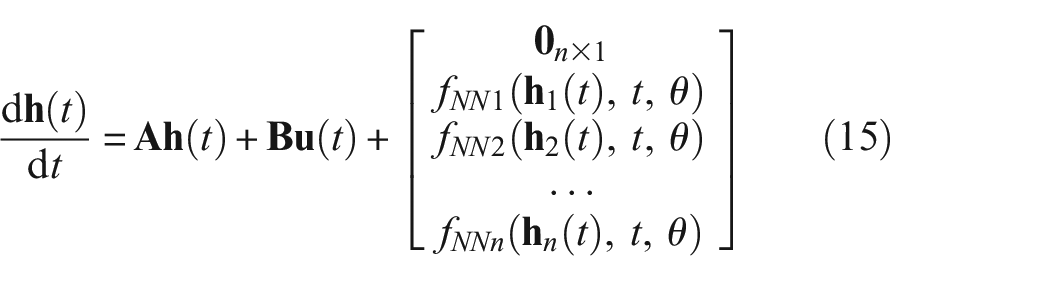
where
Phase II. Architecture of PNODEs. PNODE: parallel neural ordinary differential equation.
In the parallel NN block, the initial condition
Inference of the parallel NN block
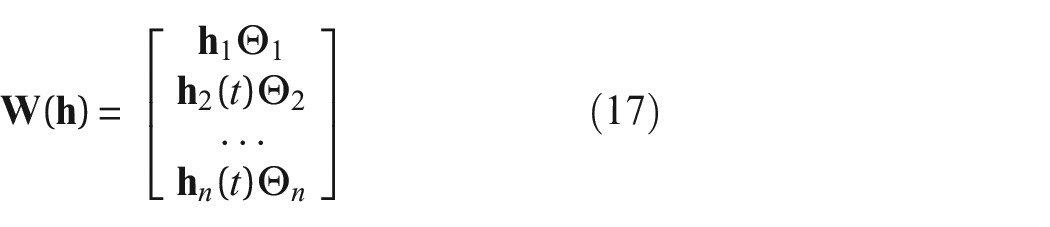
After the parallel NN block is trained, the parallel NN explicitly captures the residual discrepancy between the observed structural responses and the predictions from the known undamaged physical model, enhancing the physical interpretability of the neural outputs. The structural physical parameters are fitted and determined from each NN for structural damage identification. The ith NN
where
To reconstruct the structural parameters from the parallel NN block linking to the prior physics block, the identification of variation in local stiffness value can be achieved by conducting the process below: (a) The discrepancy between the real dynamic and prior structural knowledge of the parallel NN block
where

Damage index
After the structural parameters are determined, the damage index is introduced for structural damage localisation and qualification. Considering the structure under the health condition, the prior physics in Equation (12) is expressed as,
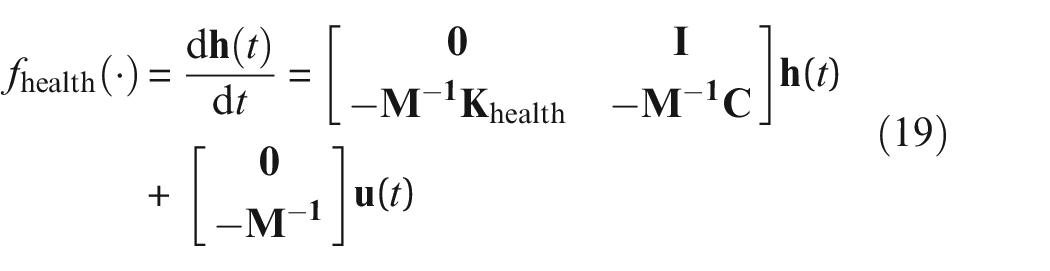
where
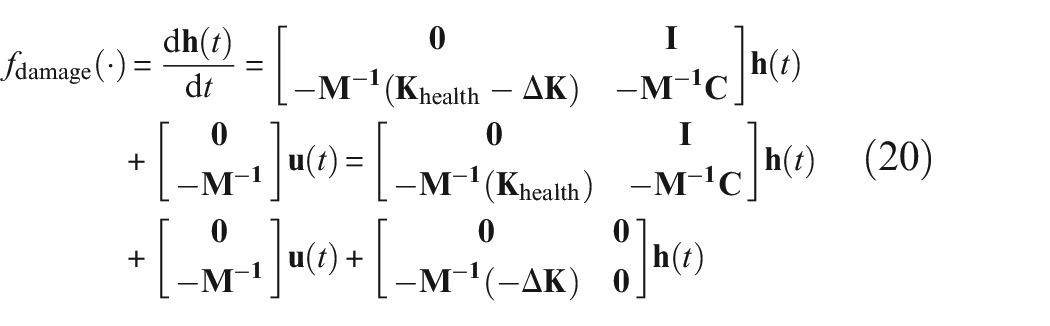
where

Compared with Equation (18), Equation (20) can be rewritten as,
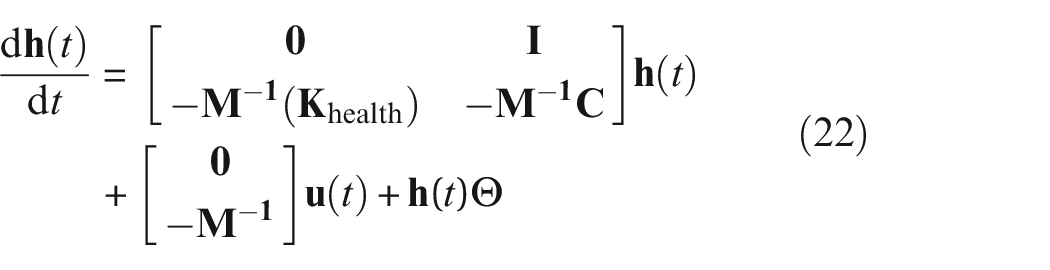
The discrepancy term
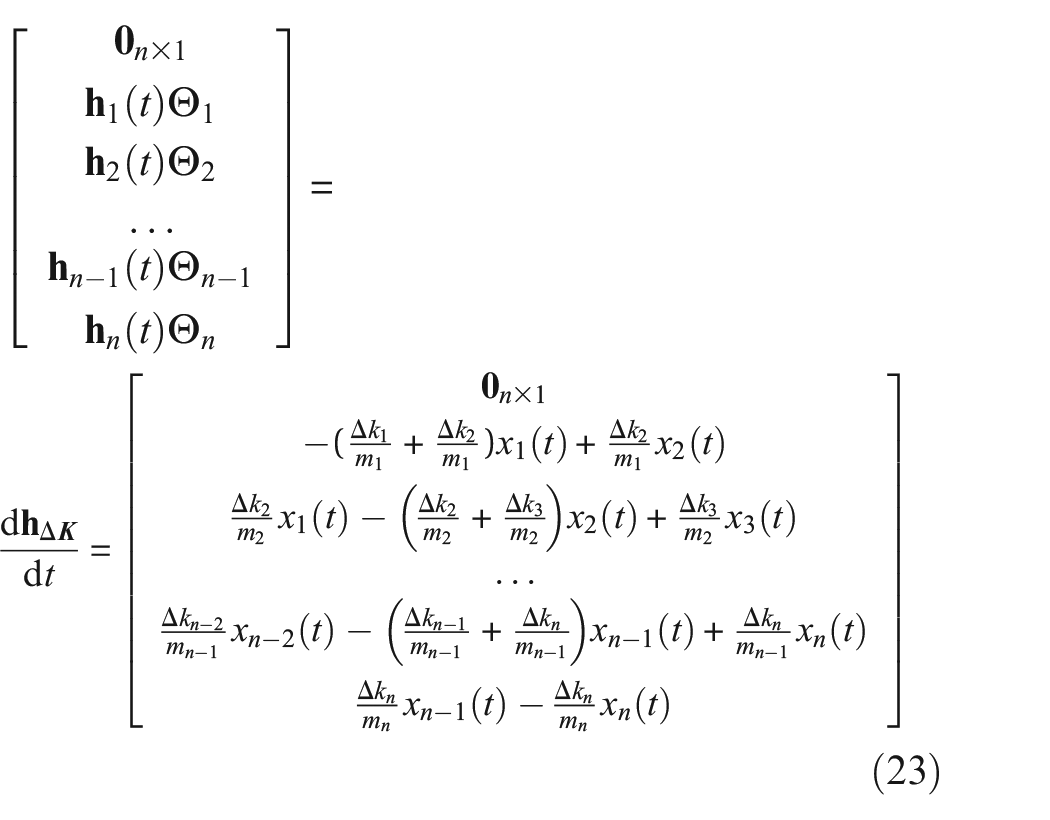
To reconstruct the stiffness change of the damaged structural system to explore the damage location and severity, each network

where
Numerical study
In this section, a three-story building structure is used to verify the performance of the proposed method for structural damage identification. The physical properties of the building structure are introduced first. Then, the data preparation process is introduced, followed by the PNODEs architecture, including the prior physical knowledge and the NN parameters. Subsequently, the proposed method is used for structural damage identification.
Numerical model
A three-storey building structure is used as an example in this section. The stiffness and mass of each floor are
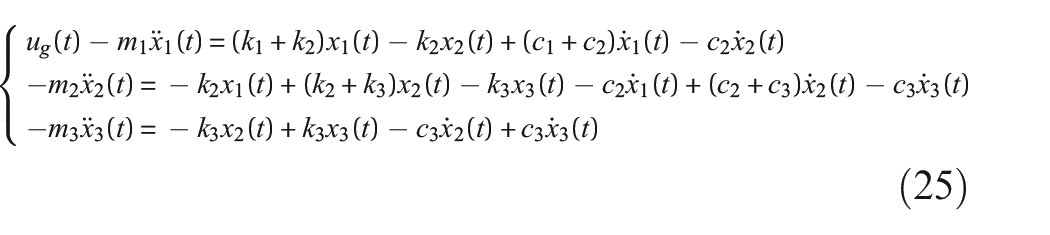
where
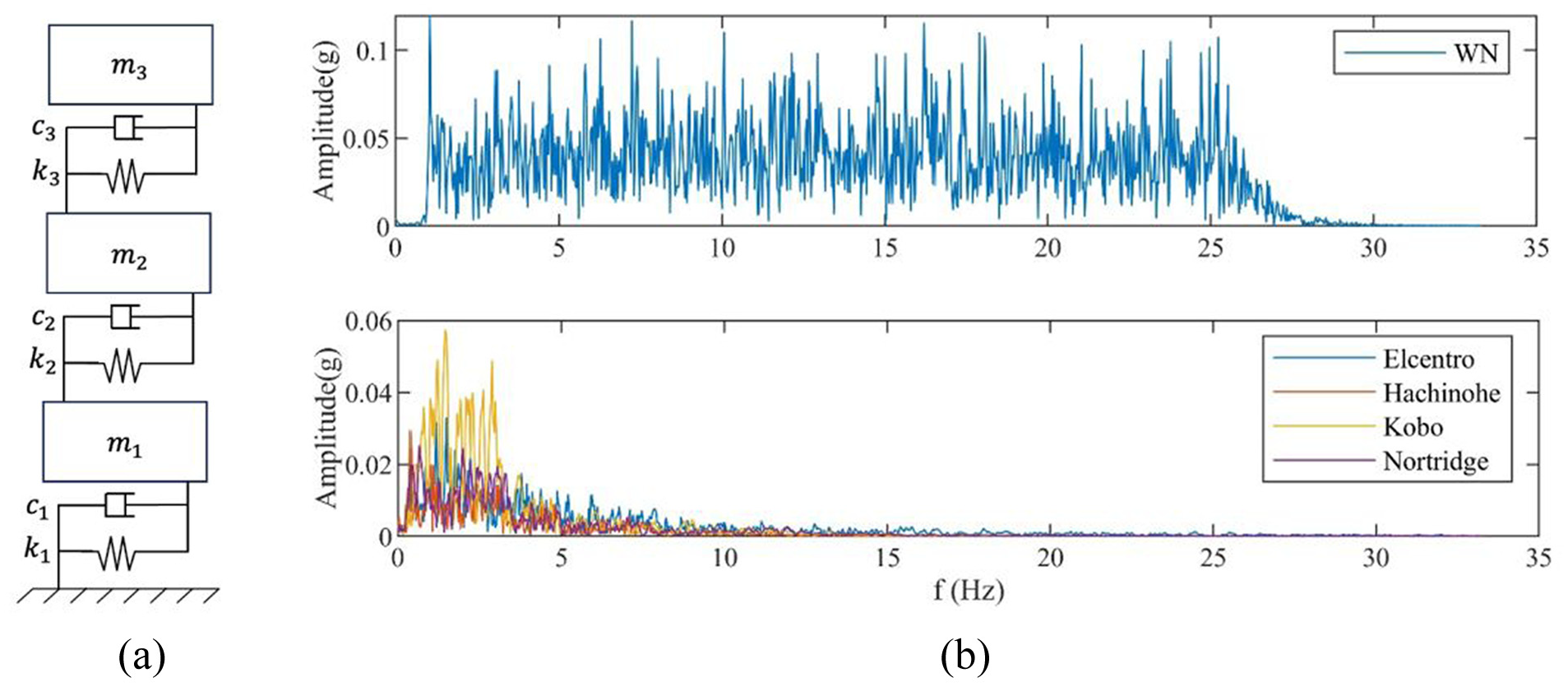
Building structure and its excitations. (a) Lumped mass model. (b) Spectra of WN and earthquake excitations.
Data preparation
Structural damage detection is typically under normal service conditions, where the structure remains within its linear or weakly nonlinear response regime. To verify the robustness of the proposed method to operational conditions, different ground excitations are simulated using earthquake records in this study, for example, El Centro (E1), Hachinohe (E2), Kobe (E3) and Northridge (E4), and white noise (WN) as shown in Figure 3(b). The sampling frequency is 100 Hz. As mentioned above, the highest frequency of the three-story model is 12.935 Hz and a sampling frequency of 100 Hz is sufficient to cover all modes of the model. In terms of frequency band for each excitation, that of earthquake recordings is between
PNODEs architectures
In the Prior physics block, the structure under health condition is given with the known ground excitation
where
In the Parallel NN block, the discrepancy
where
Architecture of the network and its training hyper-parameters.
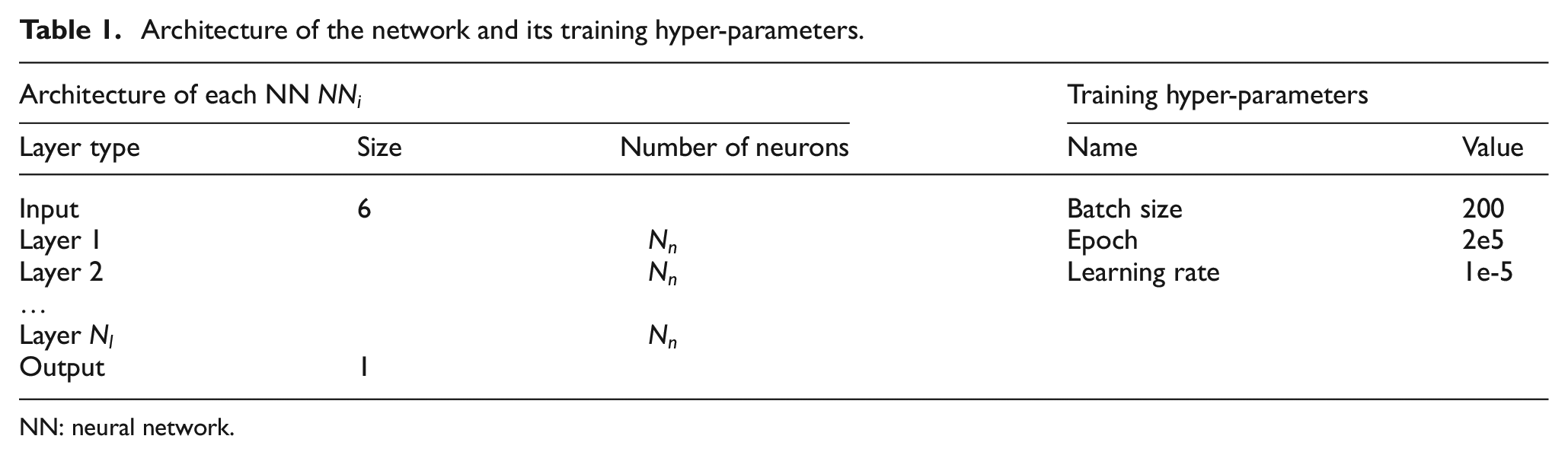
NN: neural network.
All models were implemented using the PyTorch framework and trained on a NVIDIA RTX 6000 with 64 GB of memory. The training of a NN model takes approximately 65 min with about 9 GB Graphics Processing Unit (GPU) memory. The stochastic gradient descent optimiser is adopted with hyper-parameters listed in Table 1. It is noted that the scheme is implemented using Python, with PyTorch utilised for model learning. Thus, model training is accelerated by GPU.
Results
Effect of measurement noise on structural damage identification
In practice, the data contain the measurement noise. The effect of measurement noise on structural damage identification using the proposed method is discussed in this section. Different measurement noise levels, for example, 0, 5 and 10%, are studied in this section. The Gaussian white noise is added to calculated responses to simulate measurements
To compare the effect of the network architecture, five cases have been studied with different number of hidden layers and neurons in each layer. Table 2 shows the running time and MSE value for each case. As listed in the table, for a NN with two hidden layers, the running time increases with the number of neurons and the corresponding MSE value is reduced with the number of neurons. When the number of neurons reaches to 20, the computational time and the MSE value are 5.22 s and
The running time and MSE values with different networks.

Figure 4 shows identified damage indices from each
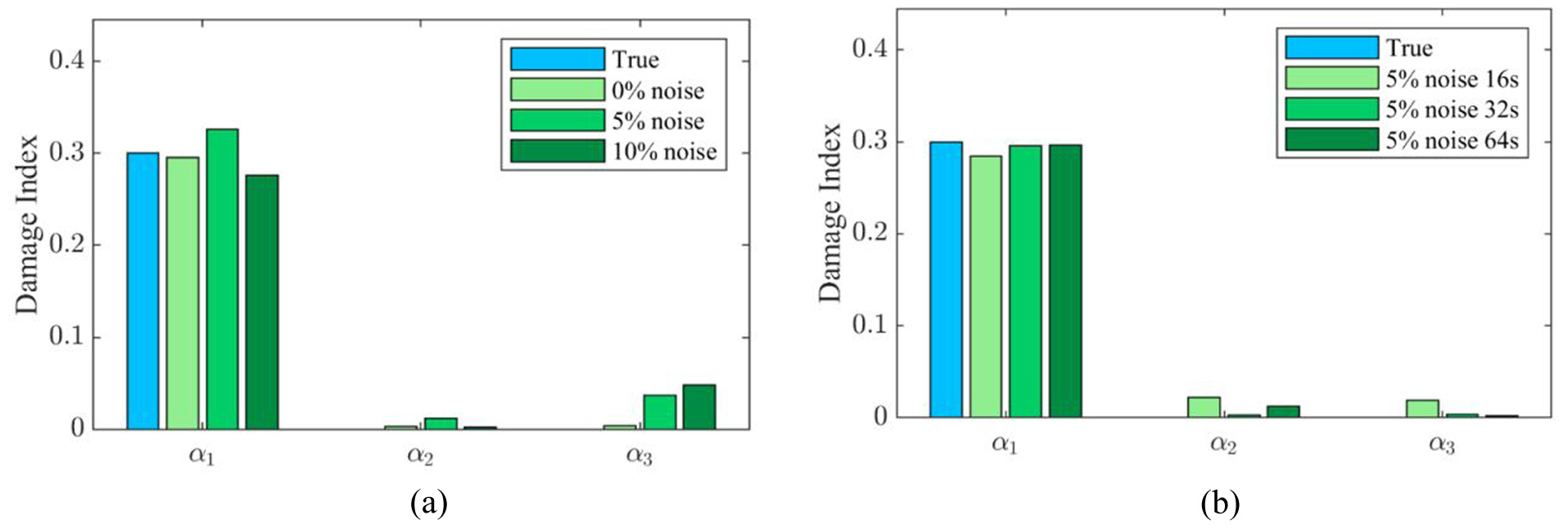
Identified results for case 1M with different measurement noise and record lengths. (a) With different measurement noise. (b) With different record lengths.
A key advantage of the proposed PNODEs framework lies in its residual learning formulation, which incorporates prior physical knowledge of the undamaged system via a state-space model. The labelled data from damage scenarios are not required. Rather than learning the full structural dynamics from data, the NNs are tasked only with modelling the residual discrepancies between measured responses and predictions from the known prior physical model. This significantly reduces the data requirement and allows the framework to operate effectively even when measurement data is sparse or limited. To verify the robustness of the proposed method to the sampling length, three different sampling record lengths, for example, 16, 32 and 64 s, are studied. Figure 4(b) shows identified results using different sampling record lengths. As shown in the figure, the damage indices of the first floor for each sampling record are 0.284, 0.296 and 0.296, respectively. The results show that the record length does not have a large effect on the accuracy of the proposed method.
The output of

The relationship between
Nonlinear structural system identification
Nonlinearities usually exist in civil structures, and it is usually caused by material, geometrical or boundary conditions (i.e., sliding surface, vibratory impact caused by semi-rigid connection, or elastic bodies).
32
In this study, the proposed method is used to identify the nonlinear structural system subjected to ground excitations. An additional nonlinear stiffness term
where
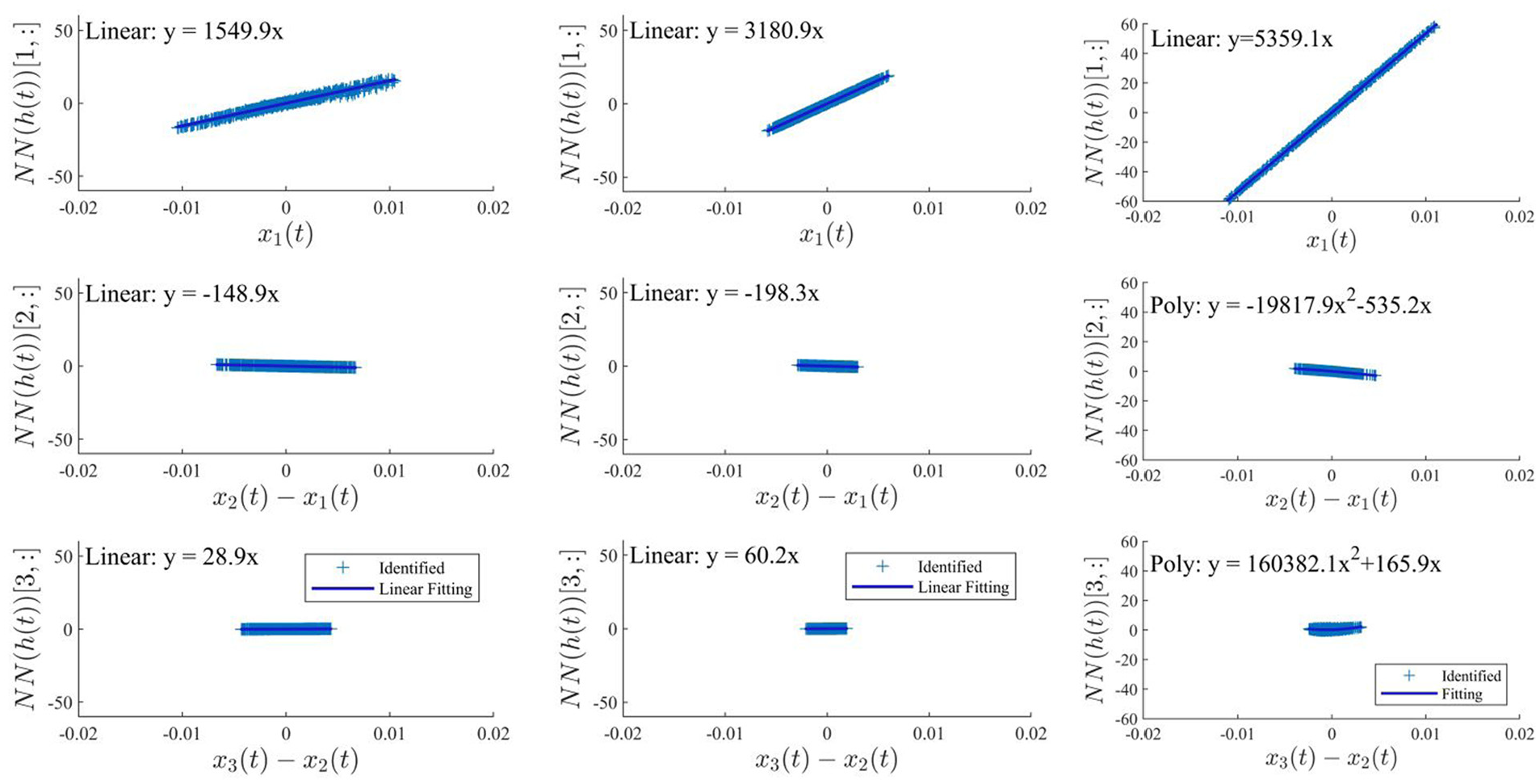
The relationship between the restoring force versus the relative displacement of each floor is shown in Figure 6. From the figure, the restoring forces for the second and third floors are close to zero, and their stiffness changes are equal to zero. The restoring force for the first floor is nonlinear, and the nonlinear stiffness can be determined by the polynomial fitting as

An experimental study of three-storey building structures
In this section, a three-storey steel building model is established in the laboratory to further verify the proposed method. First, the experiment setup is introduced. Next, the experimental study of the building structure with different damage scenarios subjected different ground excitations are conducted on a shaking table. Finally, the performance of the proposed method is demonstrated.
Experimental setup
A three-storey steel building frame was built and installed on the shake table at Tech Lab, University of Technology Sydney. The experimental setup is shown in Figure 7. The building structure is made of two spring steel strips and four mass blocks, the bottom mass block was fixed on a multi-axis shake table by two high-strength bolts. The accelerometers are installed on each floor to collect acceleration responses and the lasers are installed beside the shake table to measure the structural displacement responses. The shake table provides one-axis seismic ground motions. The first three natural frequencies of the undamaged experimental structure are 3.063, 8.620 and 12.520 Hz, respectively.
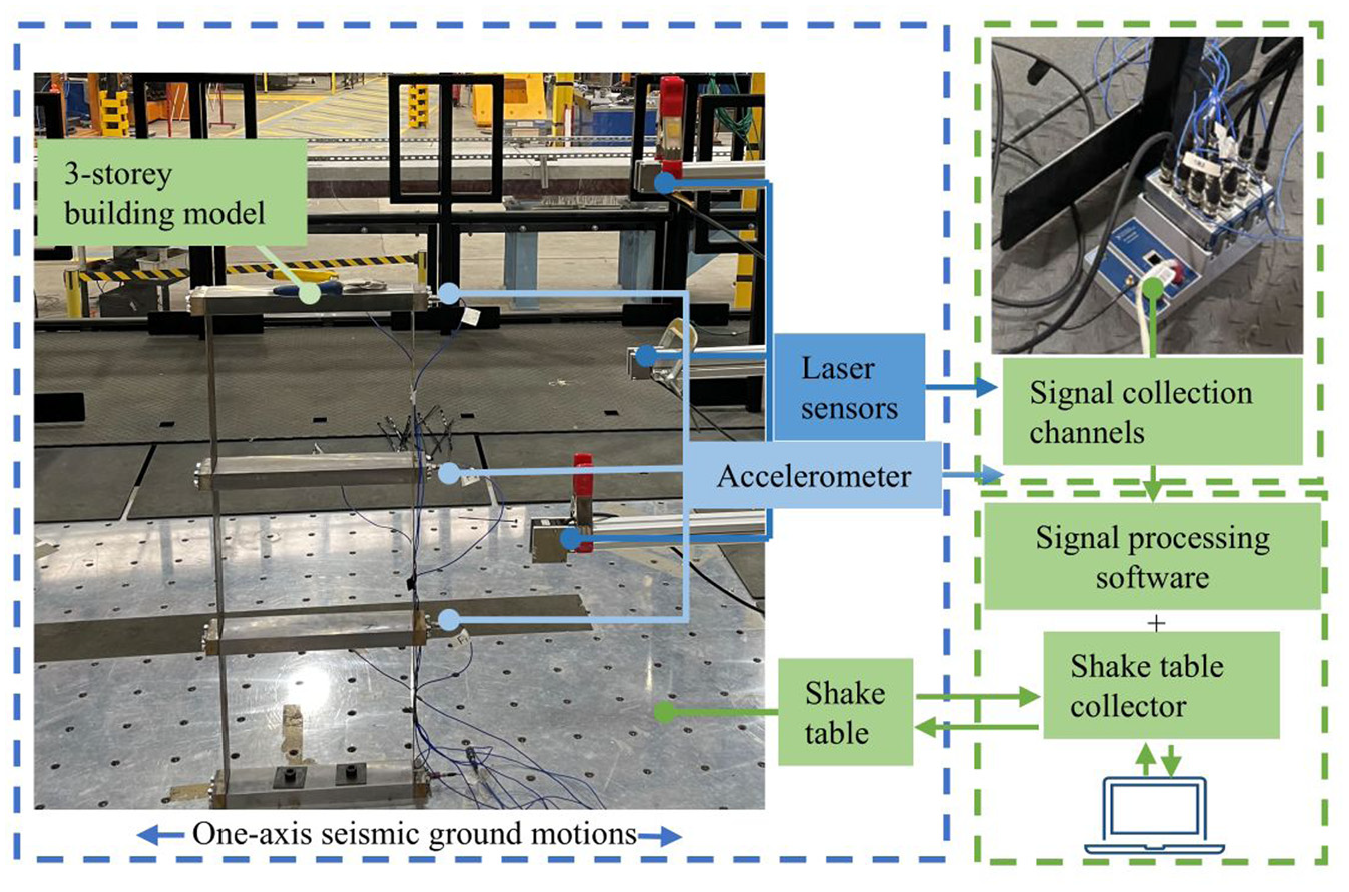
Experimental setup.
Different damage scenarios are then simulated through the saw cut on two columns as listed in Table 3. The steel columns on both sides of the model were cut symmetrically, and the location of the damage is shown in red colour in Figure 8. For each damage scenario, the displacement responses of the structure under different excitations are monitored by laser sensors.
Damage scenarios of the experimental frame structure.

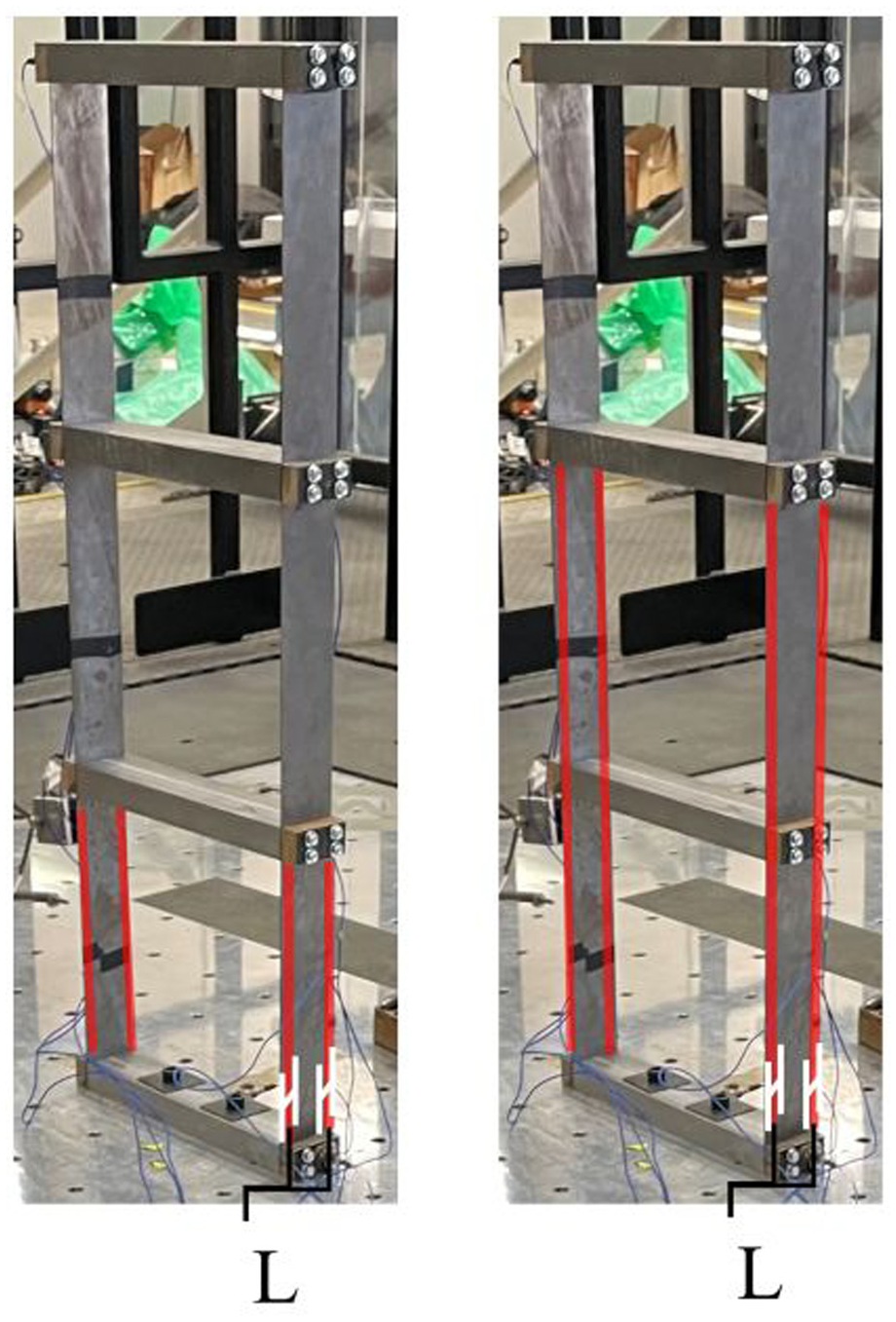
Damage models.
Data preparation
The ground excitations are the same as that in ‘Data preparation’ section, including four earthquake recordings (El, E2, E3 and E4) and WN. The recordings were used to excite the experimental structure on the shake table. The frequency band of the four earthquakes are between
Architecture of PNODEs
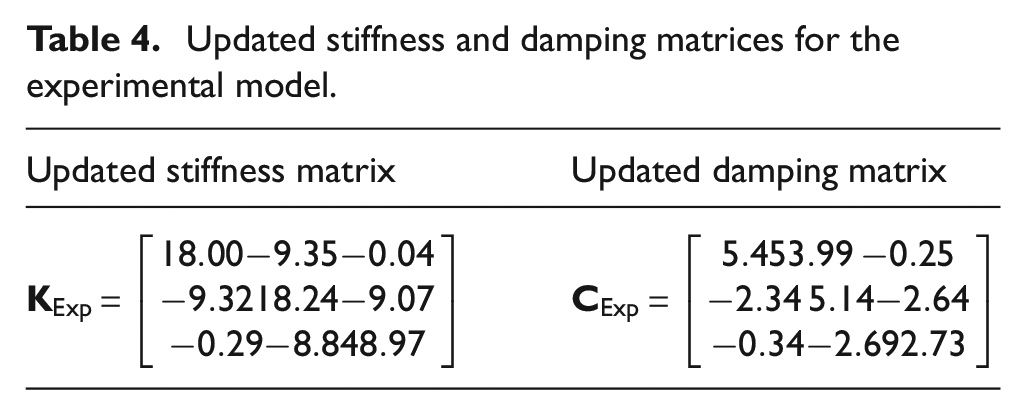
In the Prior physics block, the prior physics knowledge under the health condition corresponding to the undamaged experimental structure is simplified as a 3-DOFs numerical model. However, there are some differences due to the modelling error between the experimental structure and numerical model even both under health condition. These differences may be incorrectly identified as structural damage and captured by the parallel NN, leading to inaccurate damage identification results. Thus, the numerical model is updated using the responses of the experimental structure under the health condition. After the updating process, the stiffness and damping matrix of the experimental structure of health condition
Updated stiffness and damping matrices for the experimental model.
In the parallel NN block, the state space equations are established by structural state vectors
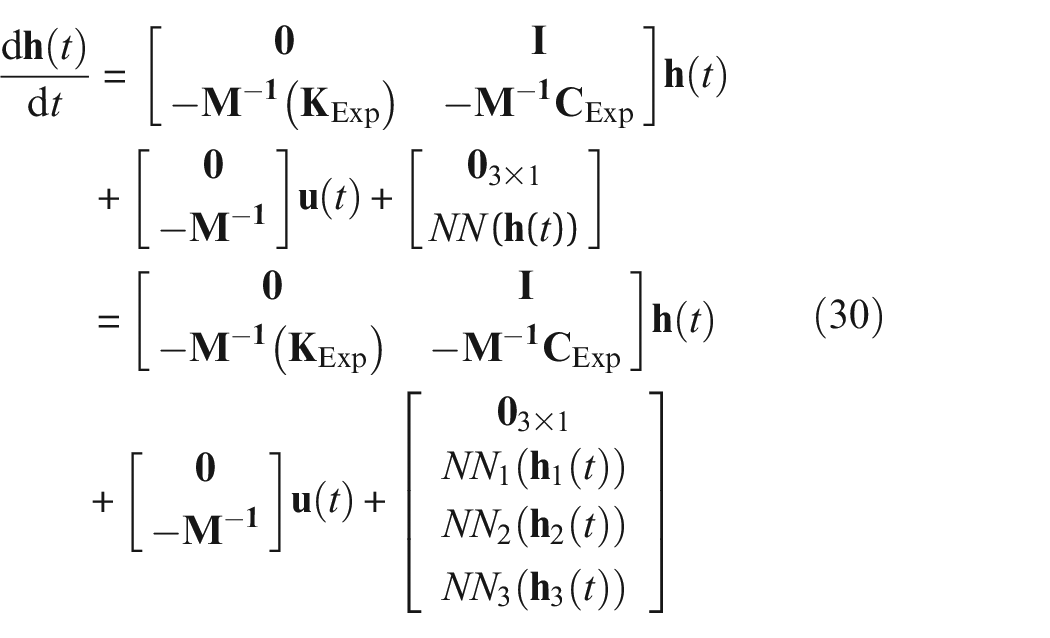
where
Results
Effect of different environmental excitations
In practice, the operational conditions may be varied. The performance of the proposed approach for structural damage identification under various environmental excitations is investigated in this section. The single damage (1M) is simulated as 30% stiffness reduction of the first floor, for example,
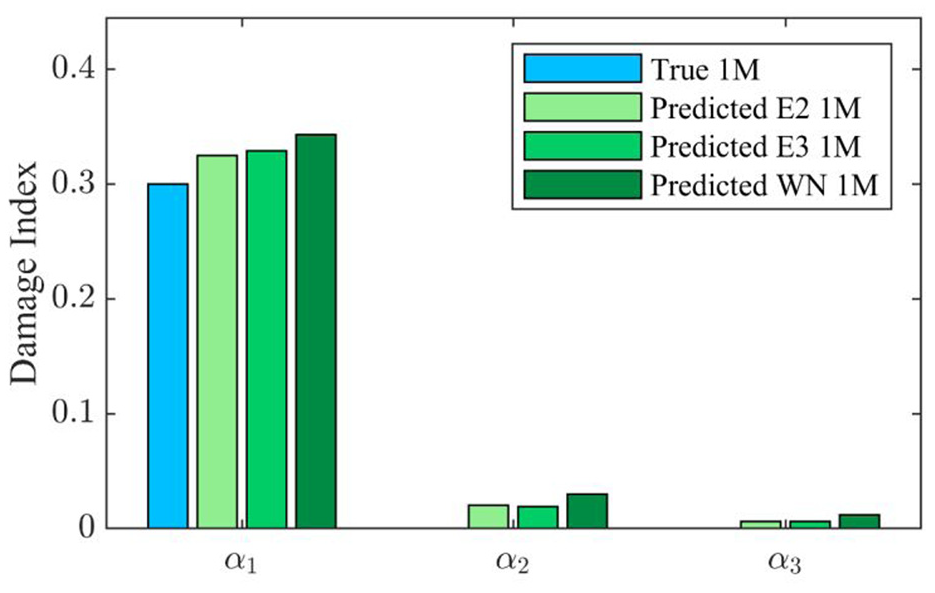
Identified results for damage case 1M under excitations of E2, E3 and WN.
The restoring force is extracted from
Output of trained
Identification of single damage with different severities
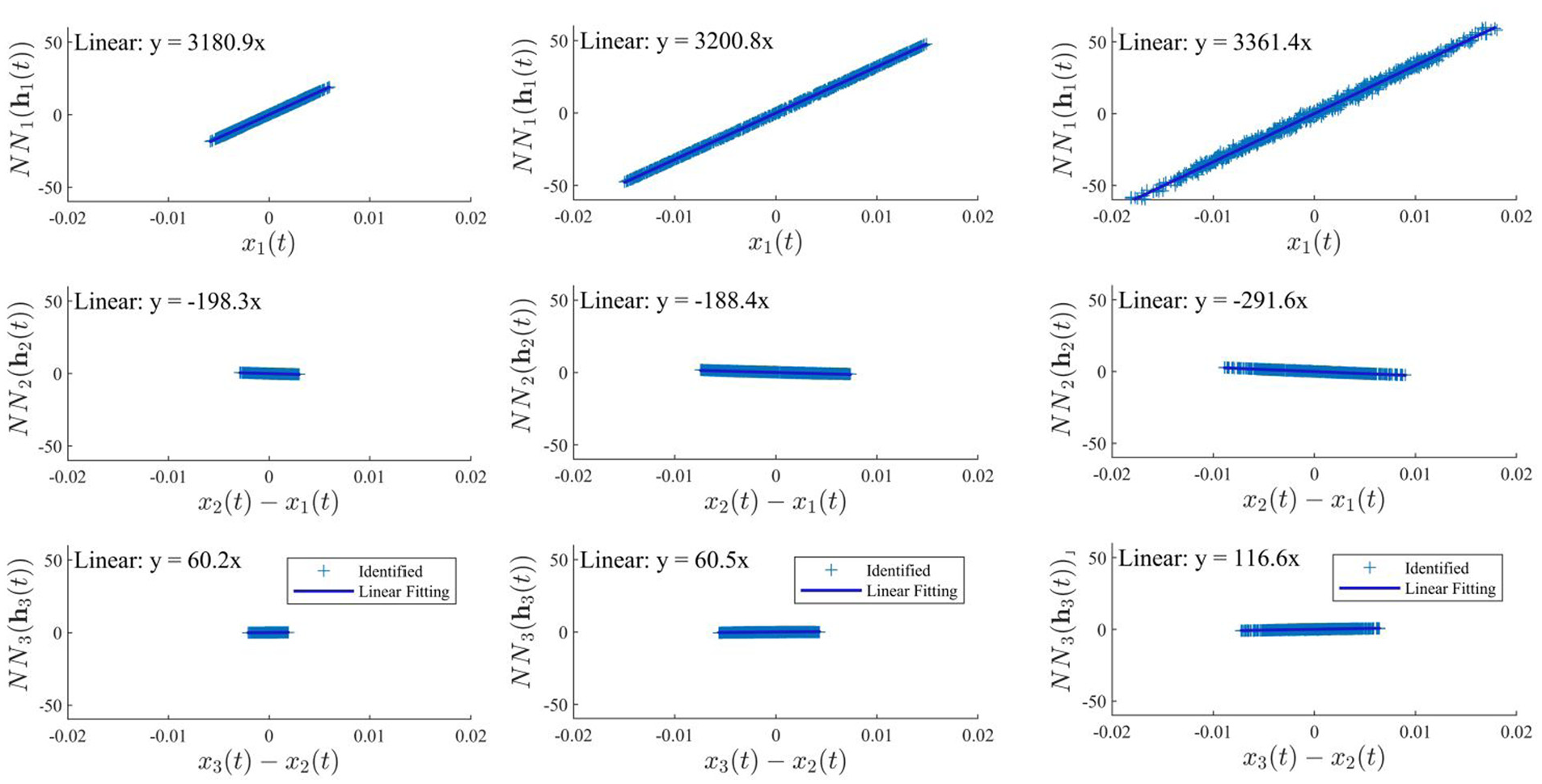
To explore the performance of the proposed method for structural damage identification, single damage scenarios with different severities are studied in this section. With the earthquake excitation (E1) is applied, dynamic responses of the structure with different damage scenarios, for example, 10% (1L), 30% (1M) and 50% (1S) stiffness reduction of the first floor were studied. Figure 11 shows the identified results compared with the true value. Upon damage scenario of 1L, the damage index of the identified result 0.126 is slightly higher than the true value 0.100. Besides, the identified damage index of 1M and 1S are 0.325 and 0.548, and they are close to the true values 0.300 and 0.500, respectively. There are small errors in identified results on the second and third floors.
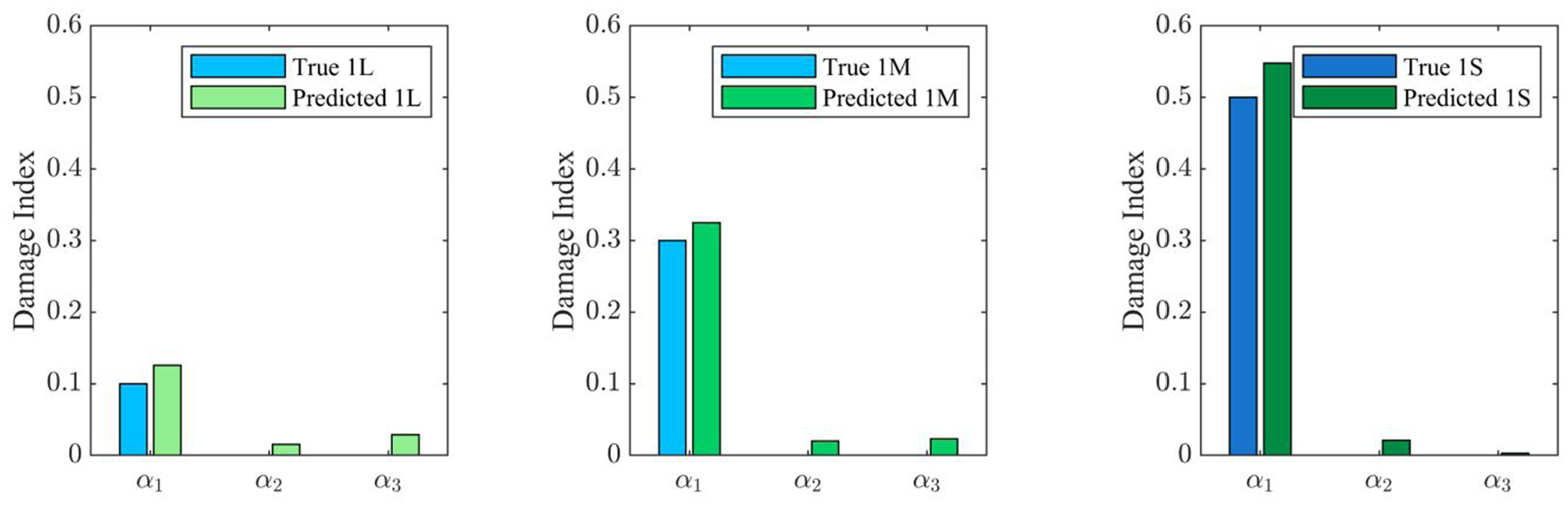
Identified results for damage cases 1L, 1M and 1S.
The restoring force is extracted from
Relationship between
Multiple damage identification
The section investigates the multiple damage identification using the proposed approach. The results are compared with that by FE model updating,
7
Transfer learning
33
and Conventional NODEs.
22
The earthquake record E1 is used as the ground excitation on the shaking table. The double damage case 1M2M is considered with the damage severity 0.300 on both the first and second floors, for example,
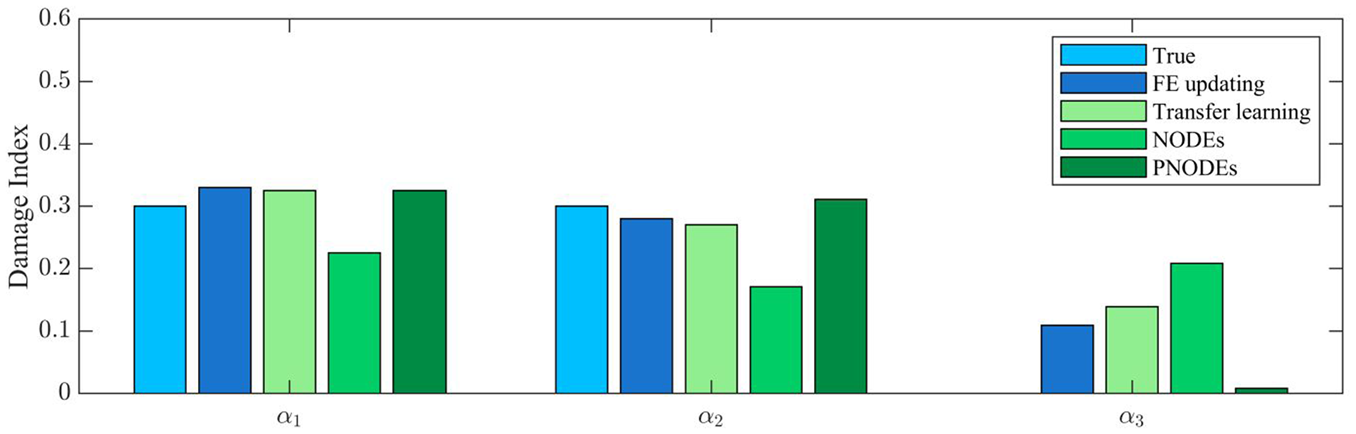
Table 5 shows the running time and MSE values using the FE updating method, transfer learning, NODEs and PNODEs. The corresponding identified results for Case 1M2M using different methods are illustrated in Figure 13. From Figure 13, all method could identify the damage successfully, and the proposed PNODEs obtain the most accurate identified results as 0.325 and 0.311 for the first and second floors, respectively. There is false identified damage index for the third floor using the FE updating, transfer learning and NODEs. The results demonstrate that the proposed PNODEs approach outperforms other methods in accurately identifying both the damage locations and severities.
Comparison of the running time and relative errors using different methods.

NODE: neural ordinary differential equation; PNODE: parallel neural ordinary differential equation.
Identified results for case 1M2M.
Considering both computational efficiency and accuracy in Table 5 and Figure 13, the FE updating method accurately identifies the double damage scenario but encounters significantly high computational costs. Transfer learning shows excellent computational efficiency, accurately localising and quantifying damages. However, it lacks interpretability due to its ‘black-box’ nature and it has a high MSE value. Conversely, the NODEs method struggles with accurately localising damage due to its single-block NN structure. Therefore, the proposed PNODEs approach provides an optimal balance between computational cost and accuracy, effectively localising and quantifying damage with enhanced interpretability and explainability.
The restoring force is extracted from

Application for 3D frame structures
In this section, the IASC-ASCE benchmark frame is used to further verify the performance of the proposed method and the results are compared that by the NODEs method directly. The physical properties of the benchmark frame are introduced first including sensor locations and damage scenarios. Then, the data preparation process is presented, following by the NODEs and PNODEs architecture and the prior physical knowledge and the NN parameters. Lastly, the results of damage localisation and qualification by the proposed method and NODES are compared. Finally, the practicality of using parallel NN in PNODE for damage quantification is summarised.
Experimental structure information
The IASC-ASCE benchmark frame, the ASCEs’ benchmark structure (experimental phase II),
34
is shown in Figure 15. The plane size of the structure is 2.5 m2, and the height of each floor is 0.9 m. The sections of beams and columns are S75 × 11 and B100 × 9, respectively. Within each bay, the bracing system consists of two parallel, diagonally arranged threaded steel rods, each with a diameter of 12.7 mm. The braces are constructed from 300W grade hot-rolled steel. To achieve a realistically distributed mass, a single floor slab is installed within each bay at each floor. In detail, there are four slabs, each weighing 1000 kg. The slabs located at the first, second, and third floors are 1000 kg. The slab on the fourth floor is 750 kg. The details are illustrated in Figure 15(b). The locations of accelerometers are depicted in Figure 15(a). For each floor, three accelerometers are installed, for example, two accelerometers on the y-axis (
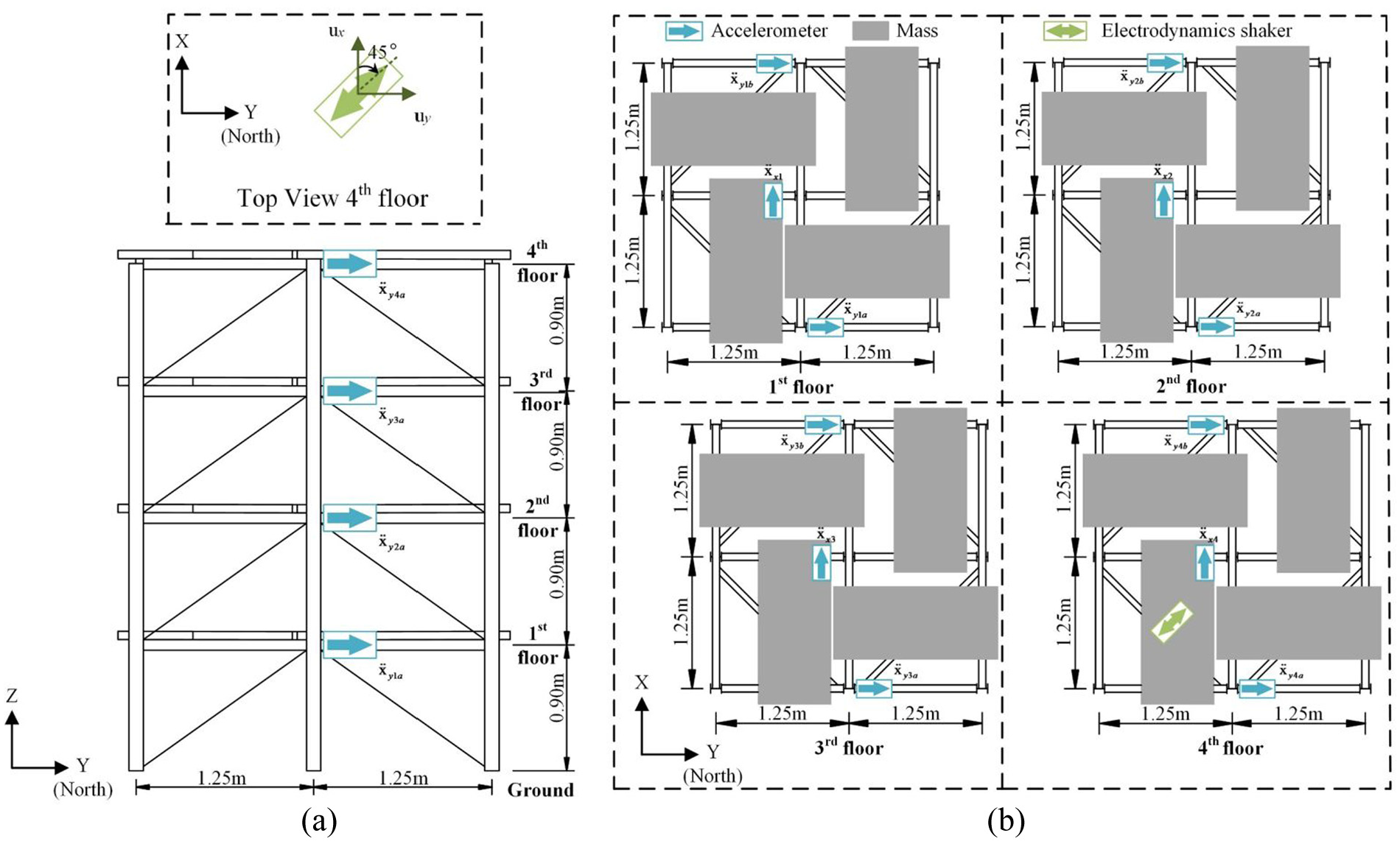
Sensor arrangements: (a) front view and (b) top view.
As shown in Figures 16(a) and (b), two damage scenarios have been simulated: the first damage scenario involves removing braces on the first floor in one bay at the southeast corner, and the second damage scenario involves removing braces on all floors on the eastern side and on the second-floor braces on the northern side.
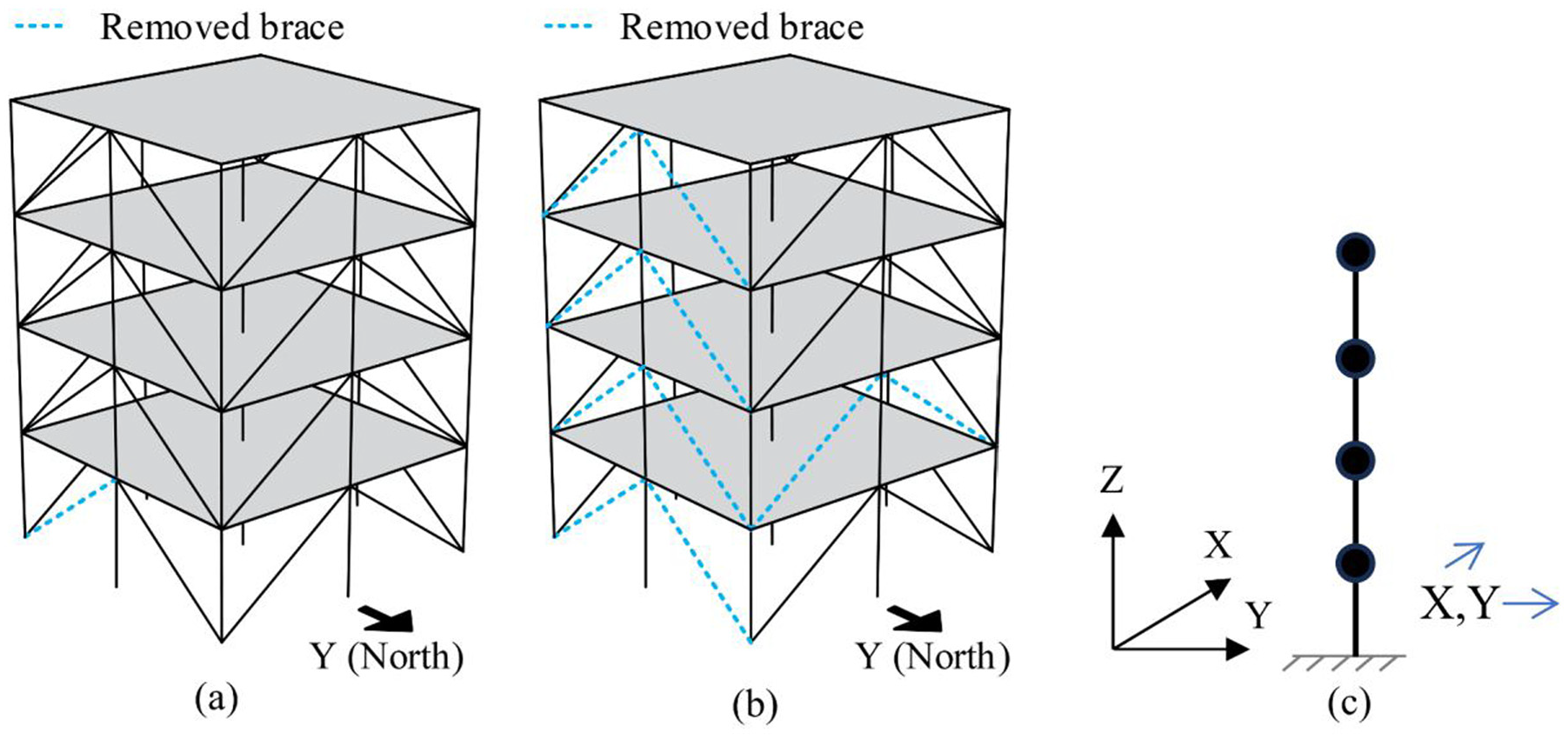
Damage scenarios: (a) removing braces on the first floor in one bay at the southeast corner, (b) removing braces on all floors on the eastern side and on the second-floor braces on the northern side, and (c) the lumped mass model.
The experimental data from this benchmark dataset comprises acceleration measurements gathered from the structure under various conditions: ambient conditions, excitation induced by a shaker, and excitation resulting from a force hammer. In addition, the natural frequency of the benchmark frame under the health condition is 3.5, 11.0, 17.5, 24.0, 29.5, 34.0, 37.0 and 39.5 Hz from the measurement data. The detailed descriptions and experimental data for this experiment are available at https://datacenterhub.org/resources/257.
Data preparation
In this work, the displacement and velocity data are necessary for input to the NN, which is deviated from the measured acceleration data of the structure under the environment excitation. Two sets of displacement and velocity responses are obtained from
The numerical model is updated using the measurement data from the undamaged structure. Then, the first 50 s of the state response
Input data of NODEs and PNODEs.
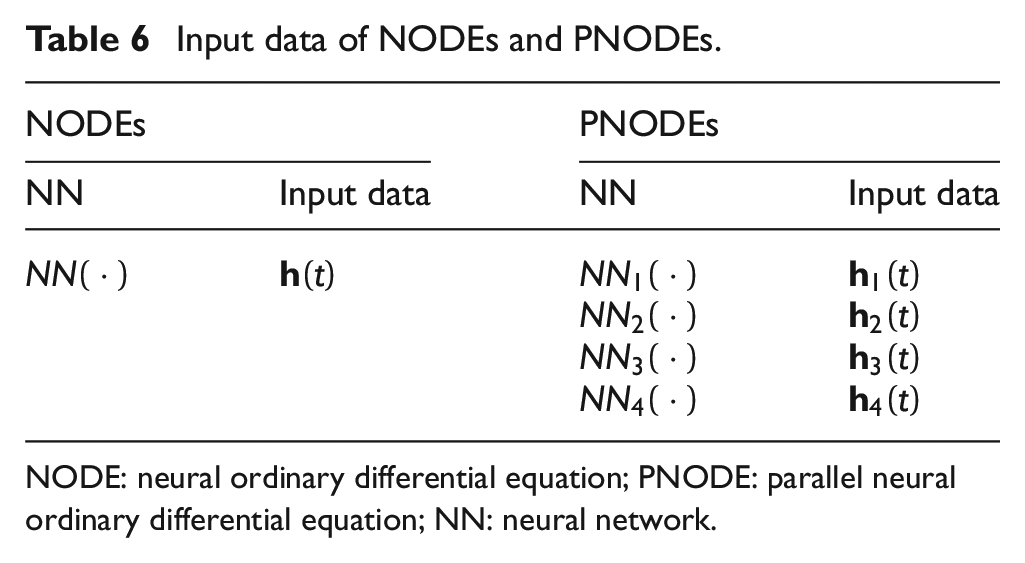
NODE: neural ordinary differential equation; PNODE: parallel neural ordinary differential equation; NN: neural network.
PNODEs and NODEs architecture
In the prior physics block, the prior physics knowledge under the health condition corresponding to the undamaged frame structure is simplified as a lumped mass model using four segments and five nodes with locations of accelerometers. Each node contains two DOFs, which indicate horizontal and translational DOFs along x and y directions shown in Figure 16(c). As a result, each segment has four DOFs and eight DOFs in total for the entire structure.
In the Parallel NN block, similar to ‘Results’ section, the discrepancy term
For the NODEs contained one whole NN, the
Architecture of NN in NODEs and PNODEs and training hyper-parameters.
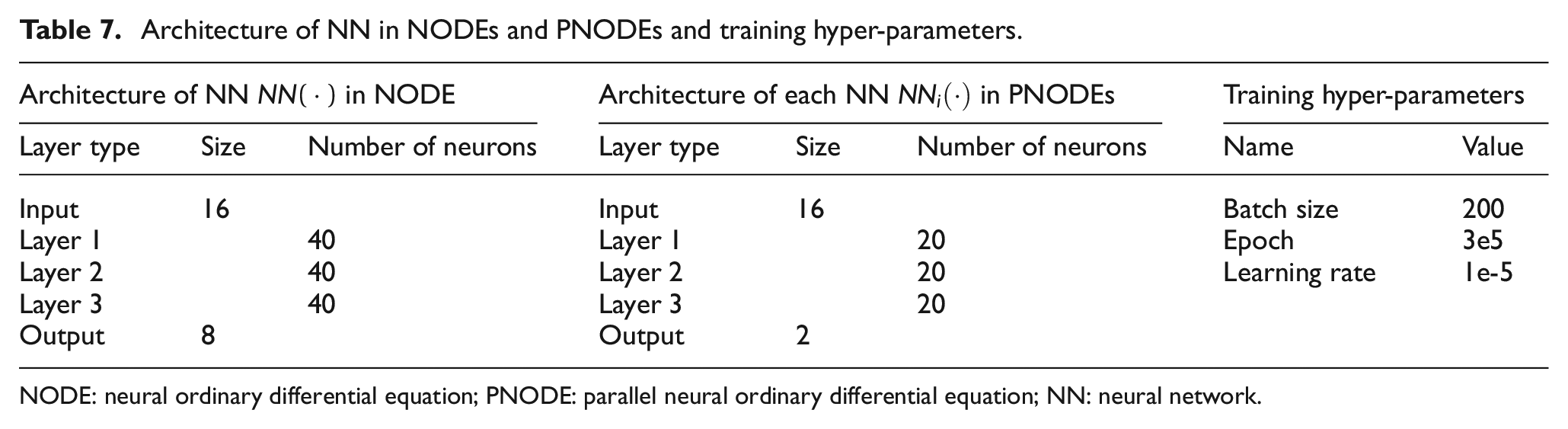
NODE: neural ordinary differential equation; PNODE: parallel neural ordinary differential equation; NN: neural network.
Results
Single damage identification
The true values of the changes in the stiffness of the frame structure were obtained from the results of the previous experiments. 35 The training time and MSE values with different number of layers and neurons are shown in Table 8. The training hyperparameters were consistent with the values in Table 7. It can be observed from Table 8 that the configuration with three hidden layers, each containing 20 neurons, achieves optimal efficiency. This configuration provides a relatively low MSE value of 9.87, indicating strong predictive performance, while maintaining an acceptable computational cost, with a running time of 5.91 s. Maintaining 20 neurons in each hidden layer while increasing the number of hidden layers to 4 or 5 does not lead to a significant reduction in the MSE value. However, it substantially increases the computational cost, resulting in a disproportionately longer running time. Considering the training time and MSE value, the optimal network architecture in this case is to employ the three layers with 20 neurons in each layer.
The running time and MSE values with different numbers of hidden layers and neurons.

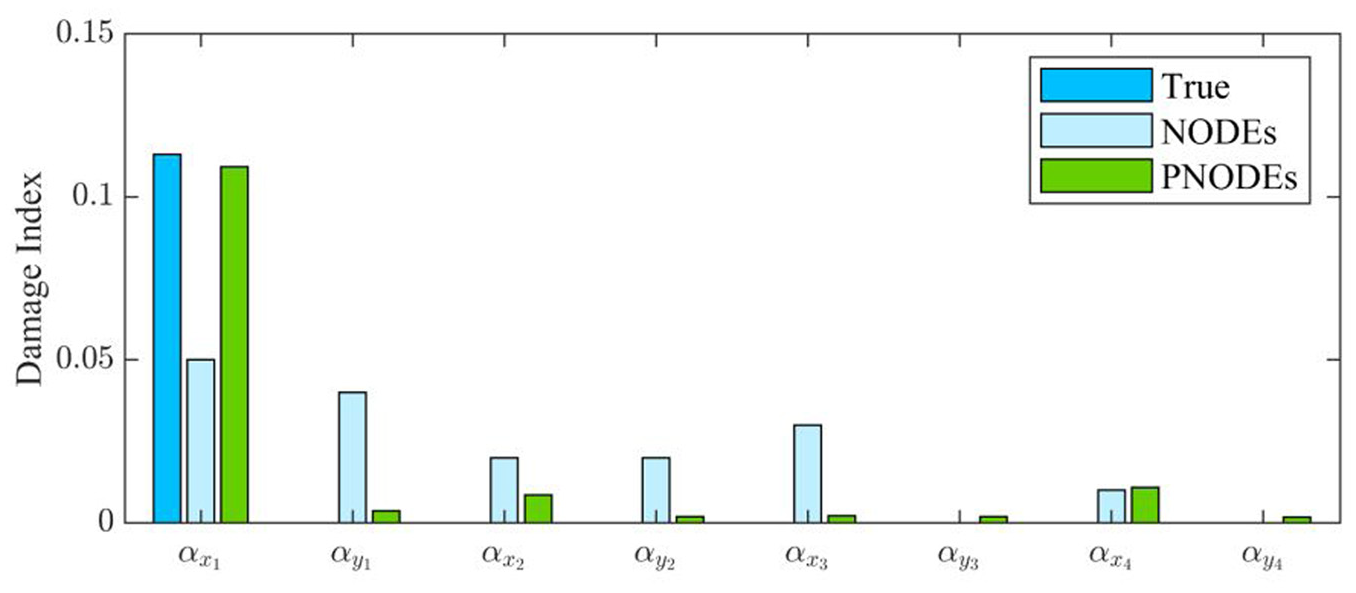
The NODE and PNODE-based methods were used, and their results were compared with the true stiffness loss, as shown in Figure 17. From Figure 17, the identified result by the proposed PNODEs is much closer to the true value than that by NODEs. The results show that the damage location can be better separated from the discrepancy information using a parallel NN. There are some errors in the identified results on the first floor and second floor along the y direction and fourth floor along the x direction by NODEs. For the damage severity, the loss of stiffness for the first floor along the x direction is 0.051 by NODEs with 54.956% error, while the true value is 0.113. By the proposed PNODEs, there are identified damage index of 0.025 and 0.013 in the x-direction on the first and fourth floors, respectively. The identified result in the x-direction on the first floor by the proposed method is 0.109 with 3.363% errors, which is much closer to the true value compared with that by NODEs.
Identified results for damage scenario 1 of the experimental structure.
To gain insight into the
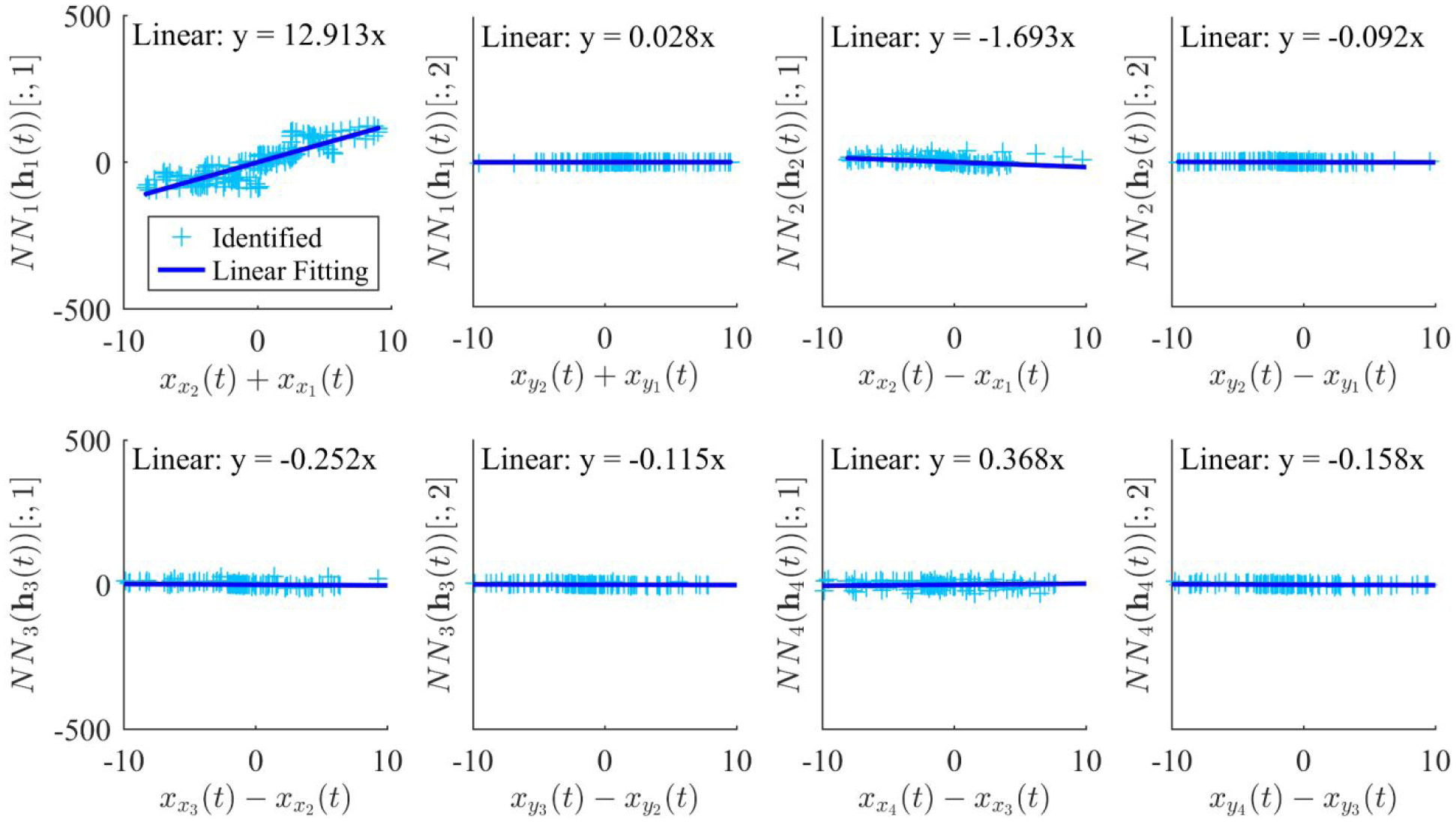
The relationship between
Multiple damage identification
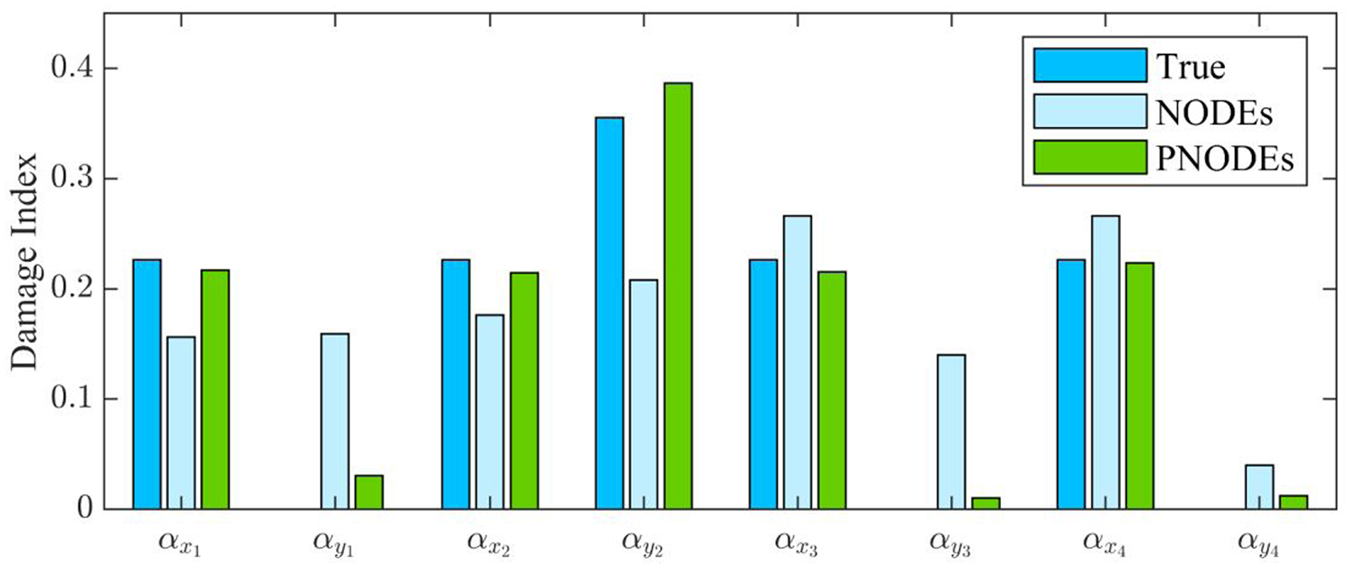
In practice, it may be much complex with multiple damage appearing in different locations. Introducing multiple damage in different locations of the frame structure makes it even more challenging. In this section, the same amount of damage data from damage case 2 is used for structural damage identification by the proposed PNODEs and NODEs. Figure 19 shows the identified results by these two methods. From Figure 19, the identified results with a maximum error of 8.840% by the proposed PNODEs method with a maximum error of 30.946% are much closer to the true values than those by NODEs. For both the damage localisation and quantification, the proposed PNODEs method outperforms the NODEs method. The NODEs method incorrectly determines the presence of damage in the y-direction in the first and third floors of the structure, as the damage indexes representing the stiffness change are significant at these two locations. In other damage locations that can be correctly identified by NODEs, the severity of the damage cannot be accurately quantified, particularly in the y-direction of the second floor, which has a very high damage severity. On the other hand, the PNODEs method localises the damage location correctly, except for the y-direction of the first floor. The identified damage severities by the PNODEs method are close to the true values. The results show that the PNODEs method can accurately quantify the damage severities of multiple damage. Overall, the proposed PNODEs method significantly increases the damage identification accuracy for the multiple damage case compared with the NODEs method.
Identified results for damage scenario 2 of the experimental structure.
To further explain each network, the input and output of each
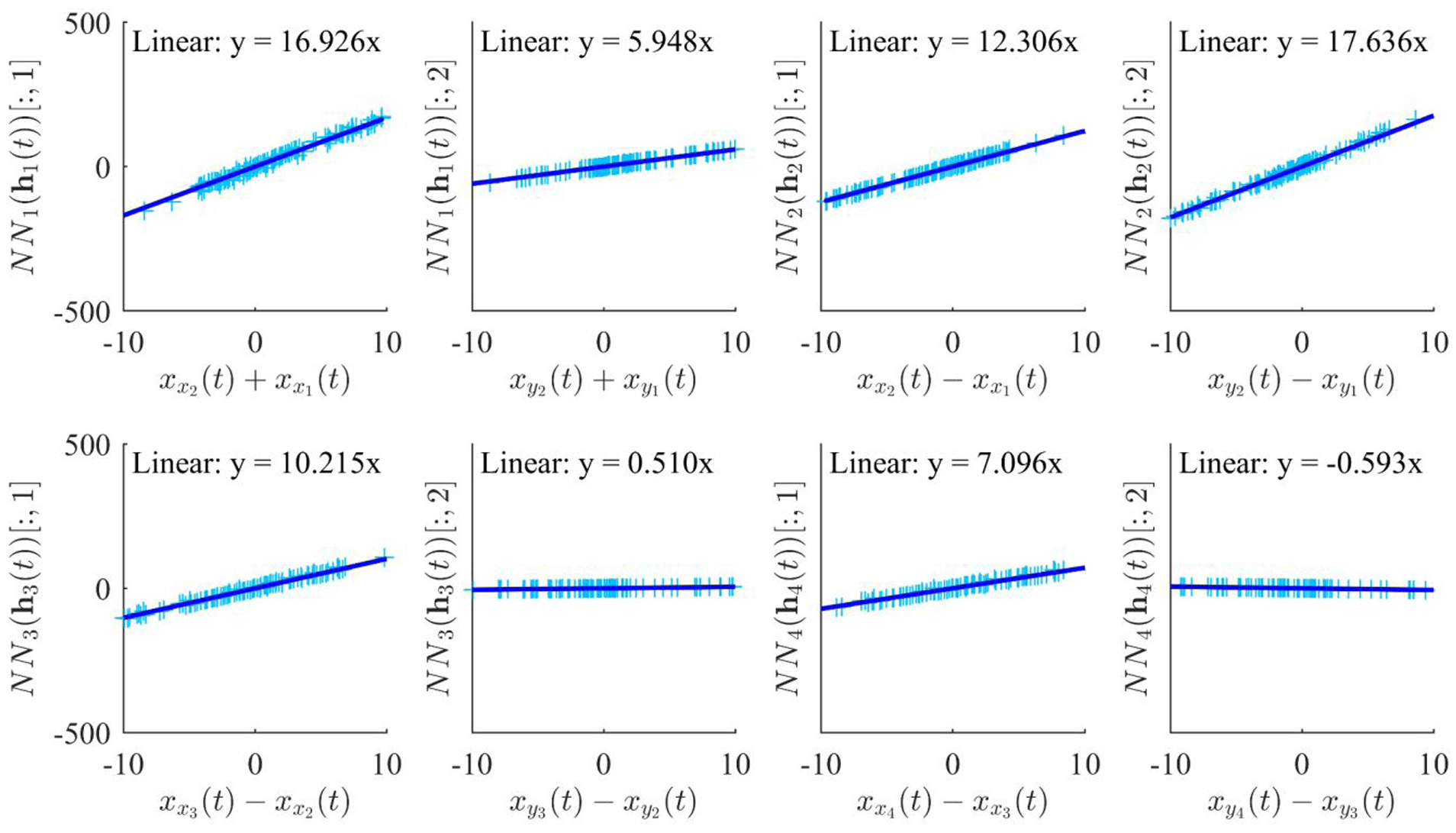
Output of
Conclusions
A new PNODEs method based on parallel NNs has been developed for structural damage localisation and quantification. The proposed method is made by a priori physical model of structural dynamical system embedded with a group of parallel NNs. This set of parallel NNs efficiently separates the discrepancy terms that represent damage information for the entire structure. The damage is then accurately quantified based on the information in each network. In addition, the interpretability of the proposed method can be achieved by coupling the implementation of an identification scheme for model parameters that can extract expressions from derived each NN terms that are consistent with each part of a structural model, thereby improving the interpretability of how the model works, overcome the issue of unexplained approximations provided by traditional black-box models. This enhances the accuracy and reliability of this damage identification method. The three-storey building structure and the 3D IASC-ASCE benchmark frame have been used to verify the effectiveness of the proposed method for damage localisation and quantification. Several findings can be concluded:
The PNODEs method requires only a small amount of current measurement data to solve parallel NNs without the need for health baseline measurement data. The discrepancy term between the health and damaged structure is represented by these NNs and is used to perform damage identification to obtain accurate identification results.
Existing studies on NODEs for structural damage identification can only store the entire discrepancy information into a single NN but cannot find the source of the discrepancy caused to achieve precise localisation and quantification. The proposed method is based on the structural dynamic representation, where each NN is fed by its associated dynamic response and separates the entire discrepancy term based on each part of the structure to overcome the problem of the confusion caused by the entire discrepancy being stacked together. Each NN in parallel networks is utilised in PNODEs to represent a part of the structure and can find the discrepancy in each part of the structure for damage localisation.
In the purposed PNODEs, damage quantification is converted into a problem of reconstructing structural parameters using a NN. Each NN in PNODEs is solved to derive the restoring force for each section of the structure separately to reconstruct its stiffness change. This further makes the NN transparent to improve interpretability.
The proposed PNODEs method requires the response information of all relevant DOFs. Due to the limitation of sensors in practice, only part of the DOFs data can be measured. Future work will investigate to utilise the limited number of measurements for structural damage identification.
The numerical and experimental results show that the proposed PNODEs framework is robustness to the measurement noise and operational excitation. The proposed method can be extended to the nonlinear structural system identification. Further study will be conducted on nonlinear structural system identification, especially under extreme seismic conditions.
Footnotes
CRediT authorship contribution statement
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded in part by the Australia Research Council through Discovery Project Number 23010806.
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author upon reasonable request.