
Abstract
Deep learning (DL)-based structural damage identification recently attracts significant attention in the area of structural health monitoring (SHM). These methods are usually characterized as black-box models. The reliability of the model relies on the quantity and quality of data used to train it, which is often not available in practice. To assist the model training, development of physics-guided neural network (PGNN), that is, combining physics laws and data in training the model, is becoming a more and more popular researched topic and approach. However, the existing studies on structural damage identification using PGNN face the problems of poor generalization ability and lack of application to the large-scale structures. In order to overcome these challenges, based on modal sensitivity analysis of large-scale structures and model reduction, a new physics-based loss function is proposed and incorporated into the plain DL model to form a novel physics-guided DL (PGDL) framework. Two large-scale structures, including a numerical continuous rigid frame bridge and the tested I-40 steel-concrete composite bridge, are adopted to verify the feasibility and effectiveness of the proposed PGDL framework. The effect of common interferences, including random noise and sparse measurement, is also investigated to examine the noise-robustness of the proposed approach. The results demonstrate that the proposed approach has a superior damage localization and quantification performance than the plain DL model under the effect of multiple interferences. The proposed framework not only provides a better solution for damage identification of large-scale structures but also enriches the research scope of applying PGNN for SHM.
Keywords
Introduction
Over the past several decades, structural health monitoring (SHM) and damage identification have attracted significant attention with the increasing number of infrastructures and civil engineering structures.1,2 SHM technologies aim to monitor structural responses and environmental conditions, determine the existence, location, and severity of internal defect and/or damage, further assess the health condition of the target structure, and evaluate its remaining service life. 3
The flourishing of human civilization and the promotion of construction techniques motivate the development of large-scale structures; high-rise buildings and large-span bridges are springing up all over the world. The blossom of large-scale structures poses unique challenges to the implementation of SHM. 4 Up to now, the identified challenges include both hardware and software levels. 5 On the hardware side, continuous efforts focus on enhancing data measurement and acquisition platforms 6 and advancing sensing technologies, 7 which are essential for capturing reliable data across large and complex structures. On the software side, research directions are evolving to address rapid diagnosis of structures under extreme events and disasters,8,9 high-efficiency big data processing techniques, 10 and high-performance algorithms development for damage diagnosis.4,11 An increasing awareness of the importance of timely maintenance and safety assurance of large-scale structures is observed. 12 This necessity is underscored by the fact that early damage diagnosis can prevent minor defects from becoming significant hazards. Due to the complexity of large-scale structures, effective SHM implementation is essential for real-time monitoring, rapid diagnosis, and adaptation to the specific challenges posed by different large-scale structure types. With the long-term service of the existing large-scale structures, some micro defects will gradually accumulate to become failures and damage, which poses an urgent requirement for SHM and damage identification of large-scale structures.
Considering that vibration characteristics only rely on structural physical properties and boundary conditions, when damage occurs in the structure and affects the structural vibration properties, the damage in theory can be identified based on the variations of natural frequencies and mode shapes. 13 Vibration-based damage identification methods, such as model updating-based methods, have been widely developed and applied for over four decades. The essence of model updating-based method is to transform the damage identification into an optimization problem based on structural dynamics and finite element method.
Model updating-based methods require high demand for optimization algorithms and an accurate finite element model (FEM) of the target structure. Numerous studies focus on swarm intelligence algorithms and their improvements.14,15 Ding et al. 16 introduced K-means clustering and the best solution updating equation to enhance the global optimization ability of Jaya algorithm in damage identification with limited modal information. Huang et al. 17 used a support vector machine to provide optimization guidance to moth-flame optimization for damage identification under temperature variations. Meanwhile, others make efforts on the sensitivity-based approach. 18 Li et al. 19 adopted dynamic response sensitivity-based method with Tikhonov regularization to identify damage of a steel frame. Zhu et al. 20 deduced the sensitivity of autoregressive coefficients of autoregressive moving average model with respect to structural stiffness reduction factors (SRFs), and least squares method with sparse regularization was used to obtain damage identification results. Simple and small structures, including cantilever beams, 20 several-story steel frames, 21 and simply supported beams,22,23 have already been used widely in model updating-based methods. However, the FEM of a large-scale structure is complex with diverse types of structural elements and numerous degrees of freedom (DOFs), thereby leading to low computational efficiency and inaccuracy in the eigen-analysis. 24 An effective solution for this problem is to condense the unwanted DOFs based on model reduction techniques, including Guyan method, 25 dynamic condensation method, 24 Iterated Reduction System, 26 and System Equivalent Reduction Expansion Process, 27 and so on. Several iterative solution methods have also been developed, such as Subspace iteration method 28 and Ritz method 29 for efficient eigen-analysis.
In recent years, the advancements in computer science and artificial intelligence bring a hot research topic in SHM, which leads to the development and application of deep learning (DL)-based methods for SHM. 30 DL-based methods aim to discover hidden information regarding structural health conditions from the measured vibration characteristics and dynamic responses of actual structures. These methods seek for establishing a mapping relationship between the observed information and structural health conditions. 31
For developing DL-based methods, attention has usually been paid to the diverse network architecture design and damage-sensitive features. Regarding the network architecture, Pathirage et al. 32 proposed an autoencoder neural network to identify the damage of a seven-story steel frame under uncertainties and measurement noises. This network was specially designed for dimensionality reduction and mapping relationship learning. A novel deep residual network with a skip connection 33 and densely connect network with dense blocks 34 have been proposed to solve the gradient vanishing issue in damage identification using deep neural networks. Furthermore, for damage-sensitive features, Gu et al. 35 developed a hybrid index through normalized modal flexibility-based index and autoregressive coefficients with a high robustness of ambient temperature variations and measurement noise. Wang and Shahzad 36 extracted time–frequency graph and marginal spectrum of the signal by Hilbert–Huang transform to use as the input to neural networks. In addition, some studies considered both architecture and damage-sensitive features. For instance, in the study of Xiang et al., 37 a parallel convolutional neural network (CNN) and frequency–time domain hybrid damage index formed by vibration characteristics and acceleration cross-correlation function have been used for structural damage identification. Guo et al. 38 designed a multiscale learning module to extract multiscale damage features. Residual learning modules and global average pooling were exploited to form a new CNN architecture for damage identification.
These approaches train network based on gradient descent to update the parameters of each layer. This means that what happens in the process is not observed, which also means a black-box model. 39 Improving the interpretability motivates the development of physics-guided neural networks (PGNNs). Zhang and Sun 40 integrated FEM updating into machine learning to achieve damage pattern recognition. Huang et al. 41 incorporated cross physics-data domain loss into CNN to form a physics-guided deep neural network for structural damage classification. Mai et al. 42 informed damage information to neural networks to assist damage localization and severity quantification. Zhou and Xu 43 used physics-informed network to develop a baseline-free damage identification method for plate structure. Xu and Liu 44 developed a novel method for damage condition assessment and predicting stiffness change through introducing a physics-based loss and physical consistency constraint to CNN. Lei et al. 45 aimed at improving the poor interpretability and generalization of using DL techniques in damage identification by using physics-guided deep neural networks. The physics-based loss formulated by modal sensitivity analysis is incorporated into the deep neural networks to form a physics-guided network to achieve damage identification with unseen damage patterns. Except the study of Huang et al., 41 existing studies mainly focus on small and simple structures. Meanwhile, although Huang et al. 41 made some effort on a large suspension bridge in the numerical example, the experimental example is still a laboratory steel frame. Only damage classification results are obtained, but damage localization and quantification are not. Studies on applying the PGNNs in damage identification of large-scale civil engineering structures are limited. Moreover, PGNNs have also been used for other tasks, such as bridge pier assessment, 46 bridge damage detection, 47 structural dynamics simulation, 48 and seismic response modeling. 49
The abovementioned two types of methods have been widely applied to the field of SHM, but it still has several gaps in the existing studies: (1) the effort of modeling uncertainties in FEM increases significantly with the increased complexity of the structure. In existing studies, limited efforts have been made for damage identification of large-scale structures, such as long-span bridges and high-rise buildings; (2) although studies have been conducted by using PGNN methods for damage identification, laboratory scale structures are usually used as examples and the extension and application to large-scale structures should be investigated.
Based on the previous study on structural damage identification using PGNNs, 45 this article aims to extend the previous research to propose a structural damage identification approach based on physics-guided DL (PGDL) with applications to large-scale structures by using modal sensitivity analysis and model reduction techniques. Modal sensitivity analysis for a large-scale structure is deduced and integrated into DL neural networks to construct a physics-based loss function. A novel PGDL framework is formed for damage identification of large-scale structures. Two large-scale structures, including a numerical continuous rigid frame bridge and a real steel-concrete composite bridge, are adopted to verify the proposed PGDL framework. Compared to the plain DL model, the training curves and R values of the proposed PGDL framework indicate that the proposed approach has a better fitting performance and provides a better damage identification performance under the noise effect.
The remaining contents are organized as follows: the second section presents the theoretical background of structural damage identification and development of PGDL framework. The proposed PGDL framework for damage identification of large-scale structures is described in the third section. The fourth section introduces a continuous rigid frame bridge as a numerical example under the multiple interferences to validate the proposed approach. In the fifth section, the I-40 steel-concrete composite bridge tested by other researchers is utilized to further verify the feasibility and applicability of the proposed PGDL framework in the practical applications with experimental data from the structure under different damage conditions. The conclusions and recommendations are drawn in the sixth section.
Theoretical background and methodology
Structural eigen equation and damage identification model
The eigenvalue analysis equation of a structure under the free vibration can be expressed as

where

where
Modal sensitivity analysis for large-scale structures
Modal sensitivity analysis includes eigenvalue and eigenvector sensitivity analyses, to obtain the partial derivation of the ith eigenpair with respect to the jth SRF. In terms of the simple and small structures, the corresponding contents are stated in detail in the study by Hou et al. 51 However, regarding the large-scale structures, the concepts of master and slave DOFs are adopted to rewrite Equation (1) as follows:

where subscript “m” and “s” stand for the master and slave DOFs, respectively; the total number of DOFs

where

Substituting Equation (5) into Equation (3), and pre-multiplying Equation (3) by

where
However, neglecting the dynamic items causes inaccurate results in the eigenvalue analysis. Weng et al.
24
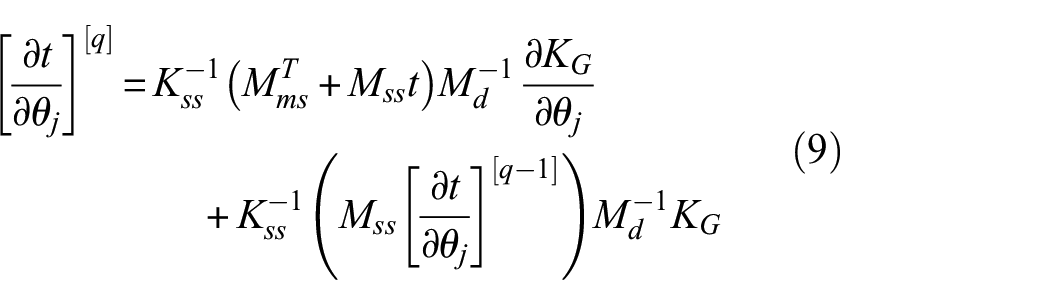
proposed an iterative dynamic condensation method to calculate the more accurate modal sensitivity of the reduced model. According to Equation (6), taking the partial derivation of the ith eigenvalue of the reduced model with respect to

where superscript “1” means the first iteration. For ensuring the accuracy, the iterative calculation is conducted based on 24
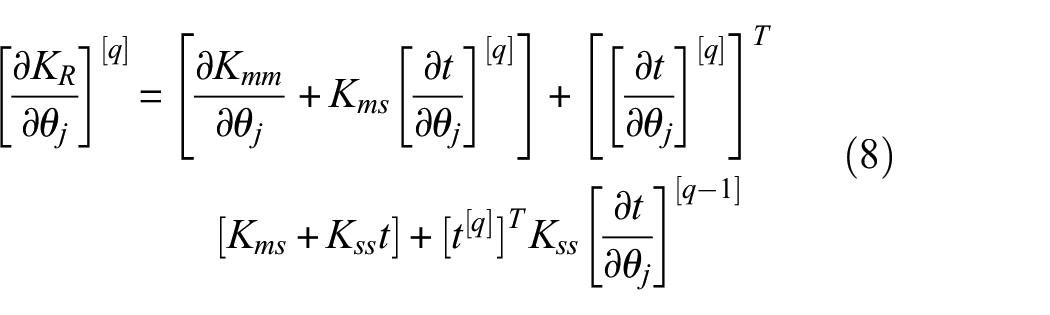
where superscript “q” means the qth iteration;

where

In the above iteration calculation, at the first iteration,

where


where


From the abovementioned process, it can be seen that the slave DOFs are eliminated in the full structural stiffness and mass matrices of the original structure, and the reduced stiffness and mass matrices show less dimension and low computational cost in the structural modal sensitivity calculation. Meanwhile, the eigenpair sensitivity of the reduced model is obtained. The iterative calculation can ensure the accuracy of the results, further overcoming the drawback on the eigenvalue analysis accuracy of Guyan method.
After the eigenpair sensitivity of the reduced model is calculated, when damage occurs, the corresponding eigenpair can be approximated based on the sensitivity analysis as

where
Deep learning
DL methods have attracted much attention and been applied to solving problems in different areas. Various DL models have also been developed and applied in the field of SHM. In this subsection, the basic theory of DL method is briefly described.
Network architecture
In order to solve different problems using DL methods, numerous network architectures have been developed, for example, auto-encoder, 32 residual networks, 33 densely connection networks, 34 CNNs, 52 and so on. Even with diverse types of networks, the essence of DL techniques is to stack the various layers based on different combinations of the corresponding hyperparameters, for developing an optimized learning capacity and mapping relationship between input and output. These layers include convolutional layer, pooling layer, activation layer, fully connected layer and batch normalization layer, and so on.
Loss function
The aim of DL methods is to form the mapping relationship between the input data and output label. The difference between the predicted and true labels can be quantified based on a mathematical function, namely, the loss function. Different loss functions should be adopted for the various tasks. In general, cross-entropy (CE) loss and the mean squared error (MSE) loss are commonly used, which are respectively described as


where
Optimizer
When the architecture and loss function are defined, the mapping relationship is gradually established during the network training. In this process, it is necessary to adopt an optimizer to minimize the corresponding loss. In this regard, the gradient descent method is a good choice. Based on this method, a series of gradient optimizers have been developed, such as batch gradient descent (BGD), stochastic gradient descent, Mini-BGD, RMSprop, and adaptive moment estimation (Adam). The details of these optimizers can be found in the study of Ruder. 55 In this study, the Adam optimizer is adopted for network training, owing to its efficiency and adaptive learning rate capabilities to consider the complexity of large-scale structure damage identification issues, including complex damage patterns and high noise interference.
Proposed physics-guided DL for damage identification of large-scale structures
Aiming at the damage identification of large-scale structures, ResNet is used to form the basic network structure. The physics-based loss function is introduced to the plain ResNet to obtain the PGDL framework. The introduction of a physics-based loss function is expected to apply a constraint to the training process to obtain a better network, and further to improve the damage identification performance. The details are described in the following sections.
Network architecture of physics-guided DL
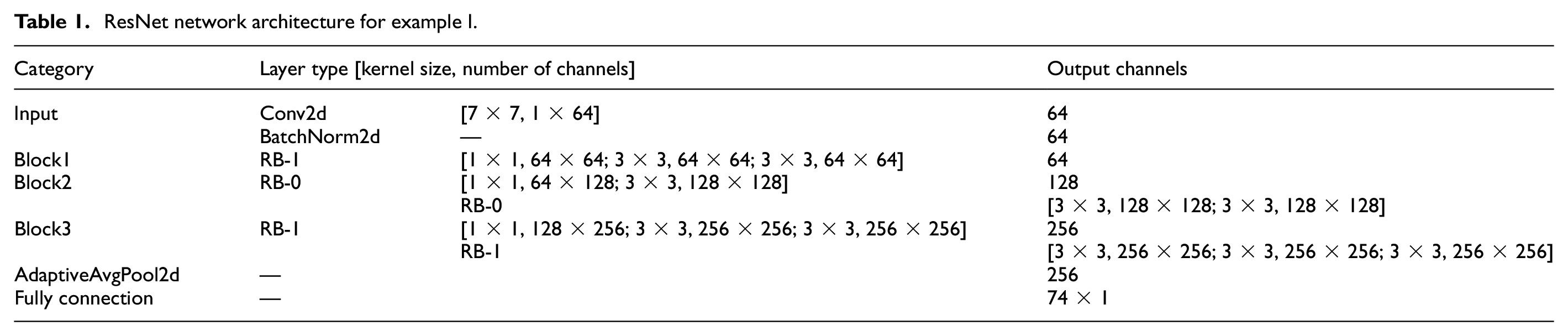
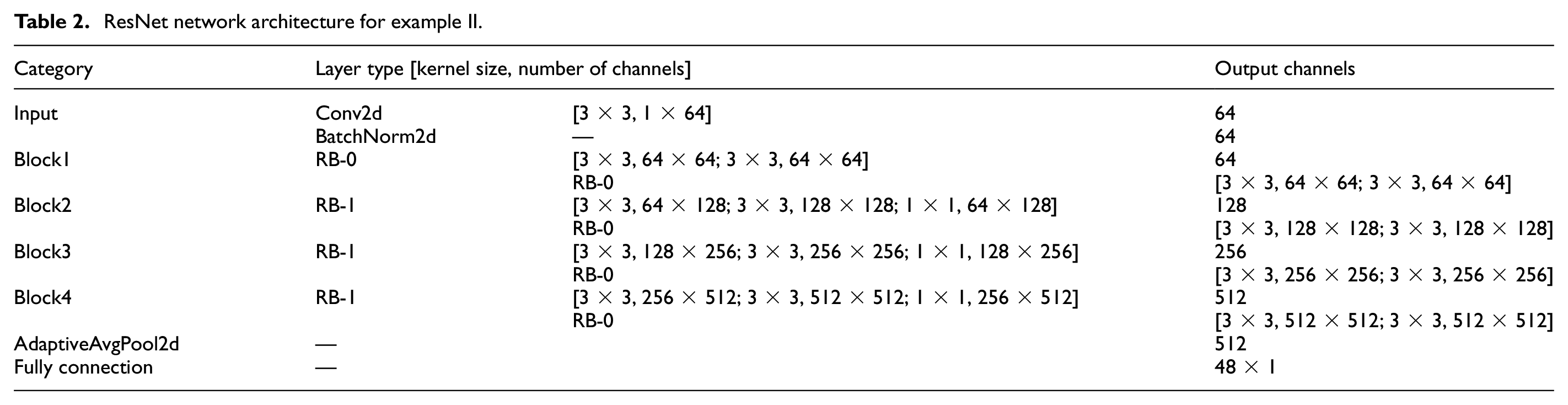
In this section, a deep ResNet network architecture is developed based on residual blocks to form PGDL framework for structural damage identification. Residual blocks are depicted in Figure 1, which is constructed by several different layers, including conventional, rectified linear unit (ReLU), batch normalization, and a shortcut connection. Owing to the use of residual blocks, the constructed network has the ability to improve the drawback of gradient vanishing, and stack a deeper network with a better fitting performance. Based on the studies by Wang et al. 33 and He et al., 56 to consider the practical dimensions of the input and output in this study, two network architectures are proposed and used in the following verification examples, and their configurations are listed in Tables 1 and 2.
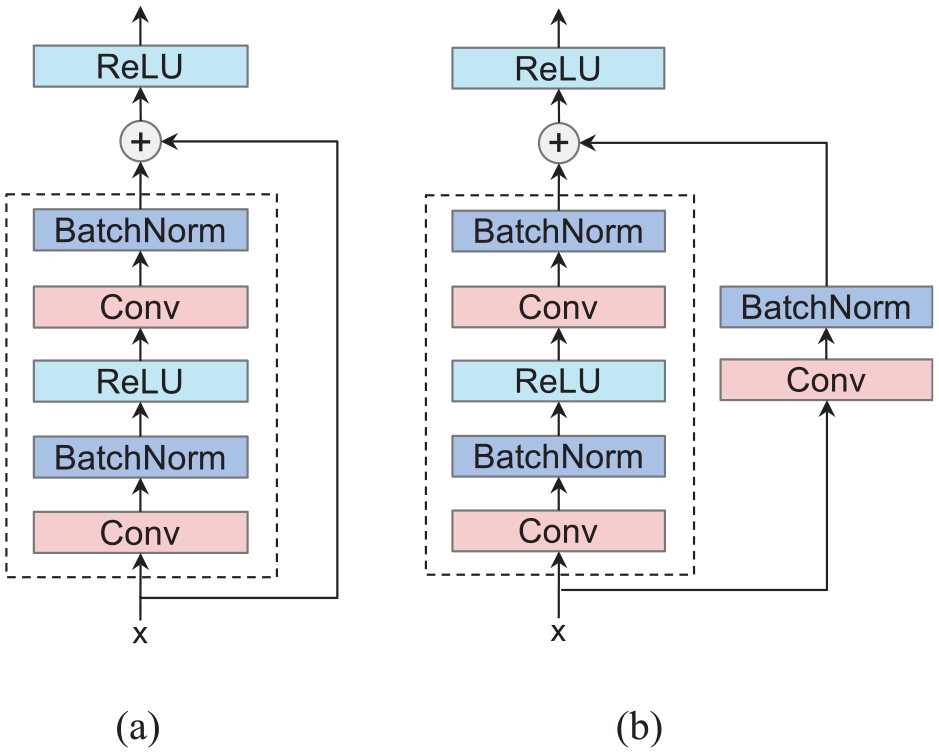
Residual block: (a) residual block with down sample (RB-0) and (b) residual block without down sample (RB-1).
ResNet network architecture for example I.
ResNet network architecture for example II.
Physics-based loss function
For the traditional DL-based damage identification with modal parameters, the fitting between input (modal parameters of structures) and output (damage label) is usually established by minimizing the MSE loss function as shown in Equation (19). However, in this study, the PGDL framework is proposed by introducing the physics-based loss function. In this regard, the original input, formed based on eigenfrequencies and eigenvectors of the damaged structure, is extended by adding the additional physical features from the FEM for subsequent calculation of the physics-based loss function. The extended input is shown as

where
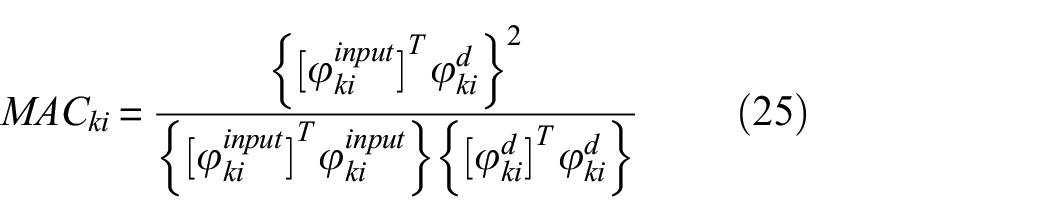
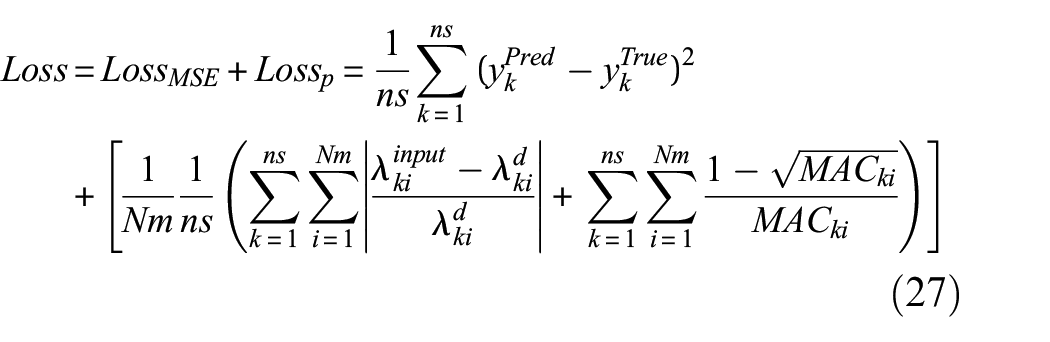
After the extension of input and referring to the eigenpairs sensitivity analysis, a novel physics-based loss function is proposed as

where

where

where
And

where
where

where
Framework for damage identification
Figure 2 illustrates the flowchart of the proposed PGDL framework for damage identification of large-scale structures. First, the FEM of the actual structure is established based on design documents and updated with the measured modal parameters of the health structure. Then, this updated baseline FEM is used to generate modal parameters in the simulated damage states to form the training and validation datasets, and additional physical features from sensitivity analysis are incorporated into the input of the training dataset to obtain the extended input. Meanwhile, the mapping relationship between the extended input and output label is fitted by minimizing the proposed physics-based loss and mean square error loss as shown in Equation (27) using the gradient descent method. When the neural network is trained well, the measured modal parameters in the practical damage situation and additional physical features are fed into the well-trained network to conduct the damage identification of a structure under the current state.
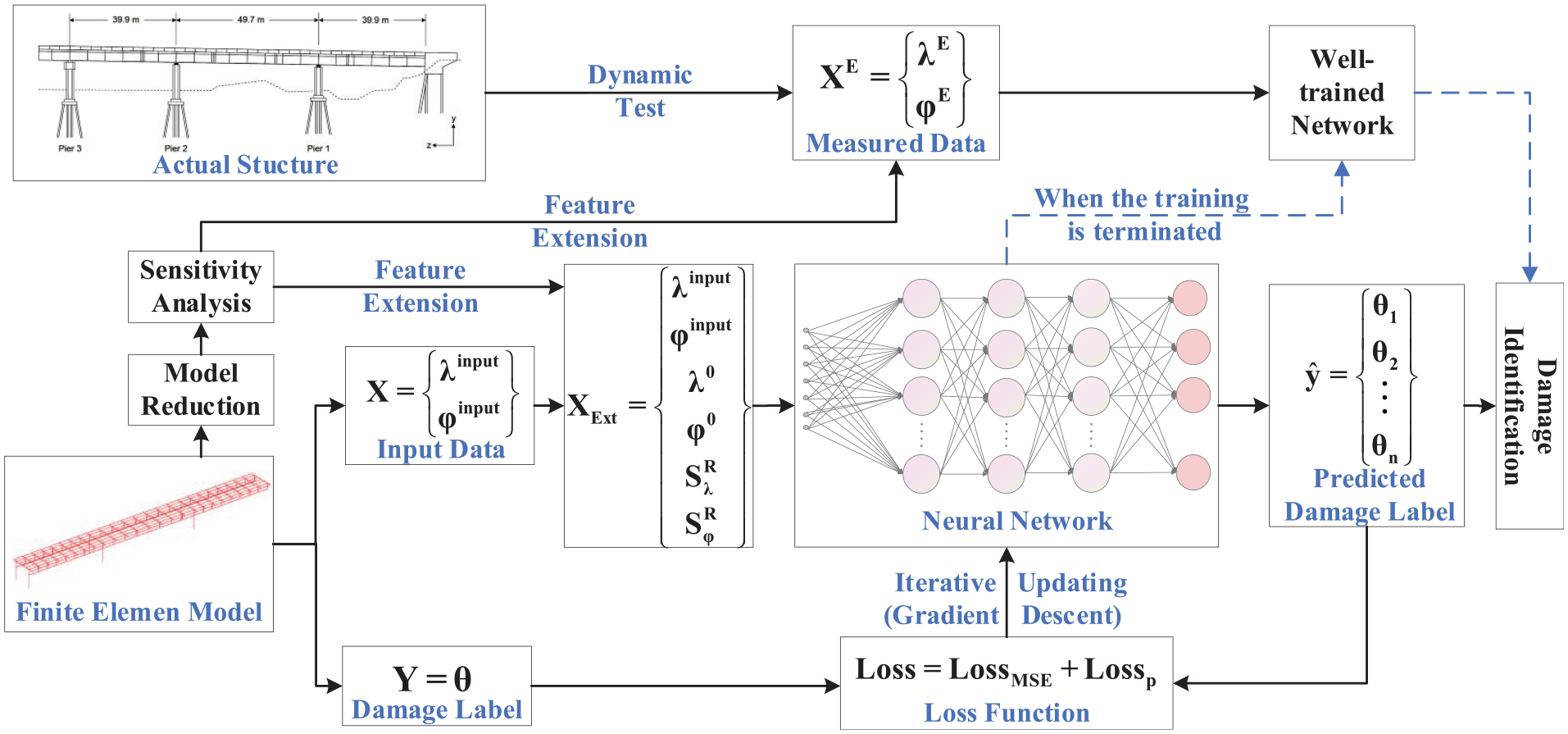
Flowchart of the proposed PGDL framework for damage identification.
It should be noted that the proposed PGDL framework differs from the existing studies involving physics-guided networks40–49 and advanced DL models.58–61 These differences are reflected in many aspects, such as research problems,48,49 classification or regression, 41 adopted network architecture,58–61 used input and output,41,42 validation examples,45–47 and incorporated physics knowledge.42–44 It should be noted that this study focuses on developing a new PGDL framework for damage identification of large-scale structures based on widely used modal parameters and model reduction techniques. Therefore, the comparative study is conducted based on the proposed PGDL framework and the plain DL model. This comparison clearly evaluates the improvement of introducing the incorporated physics-based loss and demonstrates the damage identification performance of the proposed approach.
Example I: A continuous rigid frame bridge
Bridge description
A continuous rigid frame bridge, called Renyi Guijiang Bridge, is introduced in this section to verify the feasibility and effectiveness of the proposed method. The bridge is located in Wuzhou City, Guangxi Province of China. Figure 3 illustrates the overall view of the bridge. From the construction data, the bridge main structure is composed of three continuous spans of 64 m+ 120 m + 64 m. Double-leg thin-walled piers are used to support the superstructure, and the cross-section is the hollow box girder with a varying section depth.

View of the Renyi Guijiang Bridge (red box mark).
A heavy truck with a maximum velocity of 40 km/h is used to excite the bridge for collecting the vibration acceleration data. A total of 17 sensors are placed on the deck of the bridge to collect the vertical acceleration data with a sample frequency of . The sample duration is 30 mins to obtain sufficient data to identify modal parameters. The peak-picking method is adopted to identify the first four natural frequencies and mode shapes, as shown in Figure 4. The layout of sensors is shown in Figure 5.
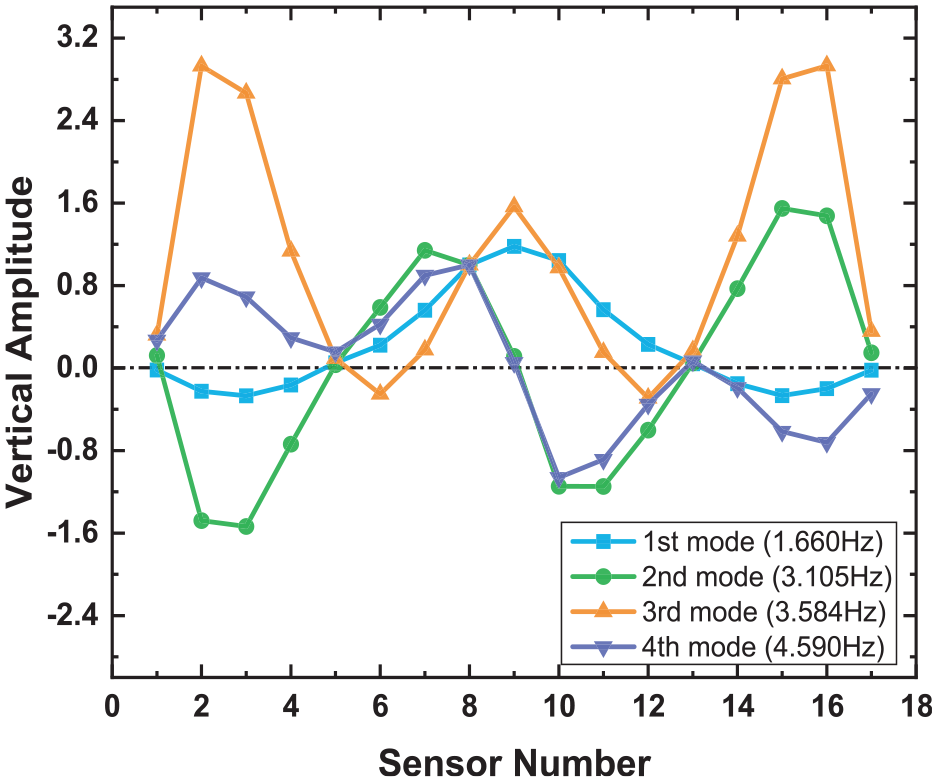
Measured modal parameters.
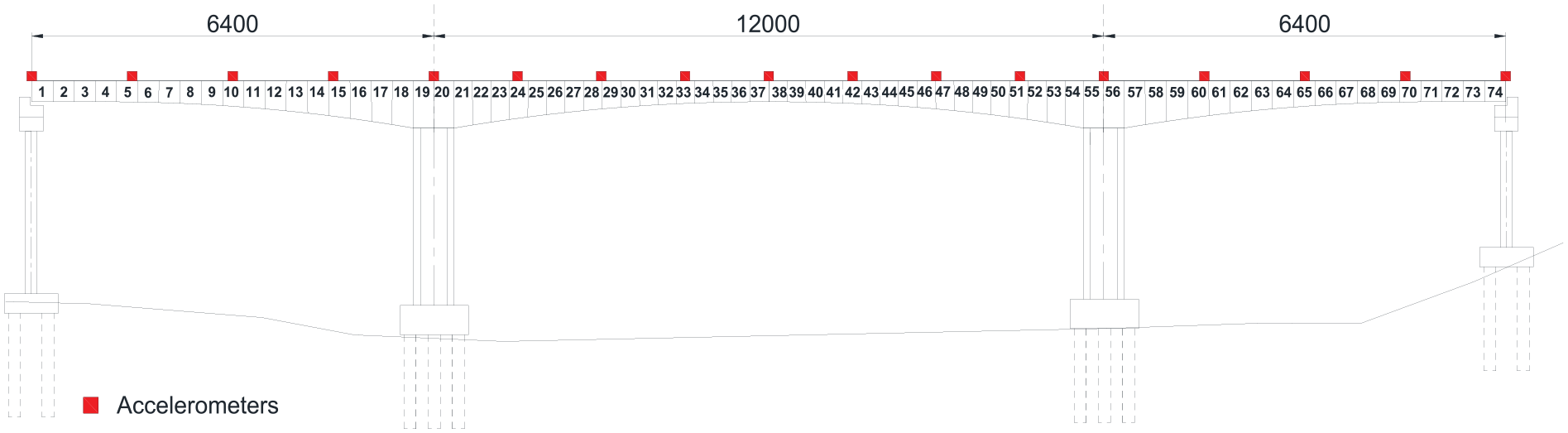
Layout of placed sensors (unit: cm) and diagram of the FEM.
Baseline FEM
According to the design drawing and construction data, the initial FEM of the bridge is built in MATLAB. Three-dimensional (3D) spatial beam elements with 2 nodes and 12 DOFs are exploited to simulate the superstructure and bridge piers of this bridge. The elastic modulus, mass density, and Poisson’s ratio are 3.45 × 1010 Pa, 2500 kg/m2, and 0.2, respectively. The superstructure is meshed into 74 elements and 11 elements for each pier. The FEM of the bridge has a total of 118 elements and 714 DOFs, which represents a large-scale structure. For the boundary conditions, the fixed constraints are applied at the bottom of the piers, and the vertical and transverse translational DOFs and the vertical and longitudinal rotational DOFs are constrained at the two ends of the superstructure. The diagram of the FEM is shown in Figure 5.
The abovementioned dynamic condensation method in “Modal sensitivity analysis for large-scale structures” section is used to reduce the DOFs in the rotational direction. The Lanczos method is adopted to calculate the first several modal parameters; then the modal sensitivity matrices of the reduced model are calculated. Table 3 lists the comparison of the first to fourth natural frequencies and MACs between the experimental results and FEM analysis results. It can be observed that there are some discrepancies between the analytical and measured results, which can be attributed to the modeling errors. It is necessary to update the initial model to obtain a baseline model with a high accuracy for the subsequent damage identification.
Comparison of the first four order natural frequencies and MACs of Renyi Guijiang Bridge.
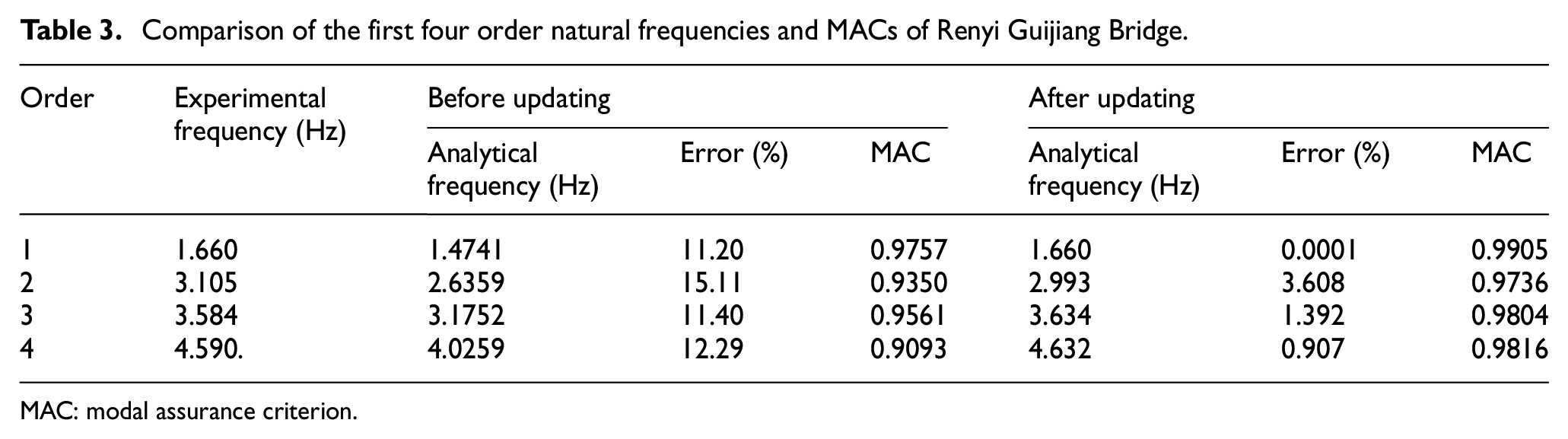
MAC: modal assurance criterion.
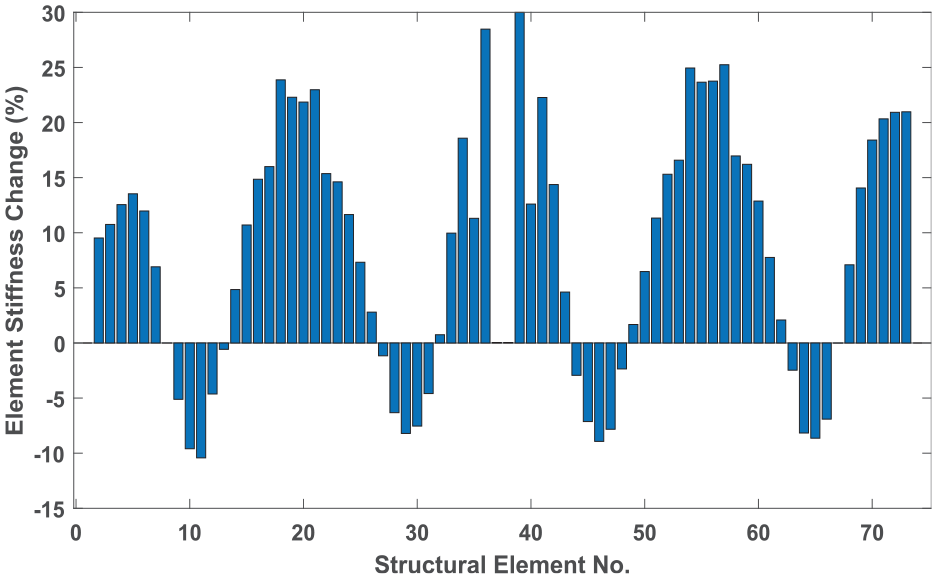
Hence, structural element SRFs of the superstructure are determined as the parameters to be updated. Then sensitivity-based method is implemented to update the initial FEM, Tikhonov regularization method combined with modal parameters sensitivity of the large-scale structure is used to iteratively update structural element stiffness to obtain the baseline FEM. After the iterative updating, the corresponding stiffness changes in each element of the superstructure are depicted in Figure 6. It can be observed from Table 3 that the differences between the measured and analytical data are minimized, with the errors in natural frequencies less than 5% and the values of MAC larger than 0.97. The stiffness change percentages are distributed in a range of ±30%. Minor differences in vibration characteristics are observed. This means that the model after updating can reflect the dynamic vibration properties of the actual structure very well, which is used as the baseline model for the following study.
Stiffness changes of each element in the superstructure.
Data generation and network training
The baseline FEM is utilized to generate the dataset for verifying the accuracy and performance of the proposed PGDL framework for structural damage identification by randomly introducing different damage cases, including one-element, two-element, and three-element damage cases. The damage cases are distributed randomly between 74 elements of the superstructure with a severity of 5–75%. For each damage case, the first four eigen-frequencies and mode shapes are collected to form the datasets. It should be noted that only 17 vertical mode shape values are gathered at sensor locations for consistency with the practical measurement locations. A total of 109,335 samples are generated, including 14,800, 29,711, and 64,824 cases for one-element, two-element, and three-element damage cases, respectively. Then each sample is reshaped to form a matrix to serve as the input to the neural network, and Z-score normalization is applied to the input data and the output label. It is necessary to point out that since no actual damage has been introduced to the bridge in reality, the simulated dataset is adopted to validate the proposed PGDL framework. The generated dataset has been split into training, validation and testing data, and the percentages of the datasets are 70, 15, and 15%, respectively. The training, validation, and testing data are used to obtain training loss curve, validation loss curve, and R-value curve, respectively. For the network training, epochs, batch size, and learning rate are determined as 1000, 128, and 3e−5, respectively. Besides, Adam optimizer is adopted to train the network, and cosine annealing learning rate schedule 57 is used to decrease the learning rate gradually to zero within 1000 epochs. A comparative study is carried out by using the proposed PGDL framework and the plain DL. It should be noted that in the plain DL approach, no physics-based loss function is incorporated, but the same network architecture and datasets are used. The training of the network is based on the training data, and validation data are used to obtain the well-trained network. Then testing data are exploited to calculate the R-value curve and investigate the damage identification performance of the well-trained network.
Interferences in vibration data
The collected structural vibration data are inevitably contaminated by the environmental interferences, such as ambient temperature change and measurement noise. The noise robustness is a good criterion to assess the stability and performance of a damage identification method. In this section, the random noise is considered to the input data based on the following equation:

where

where
Damage identification results
Condition 0: No interference
The generated dataset is utilized to train the proposed PGDL framework and the plain DL model. The curves of training and validation loss, and the R values based on testing dataset of two methods in each epoch are recorded to monitor the training process, as shown in Figure 7. After the training is ended, the typical damage identification results of different damage cases are shown in Figure 8.
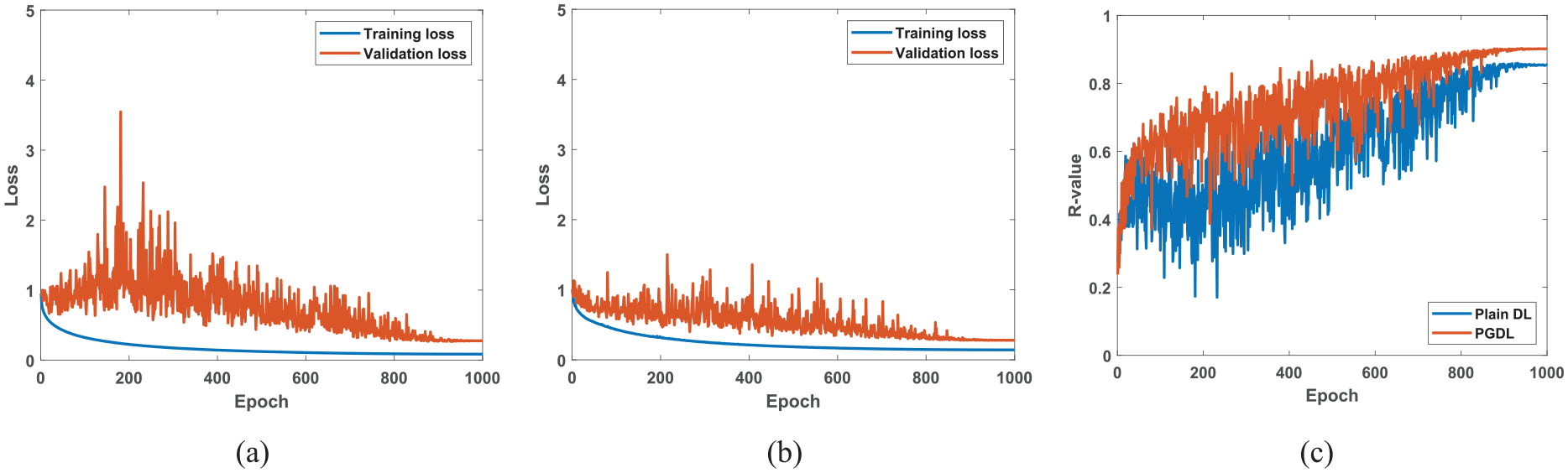
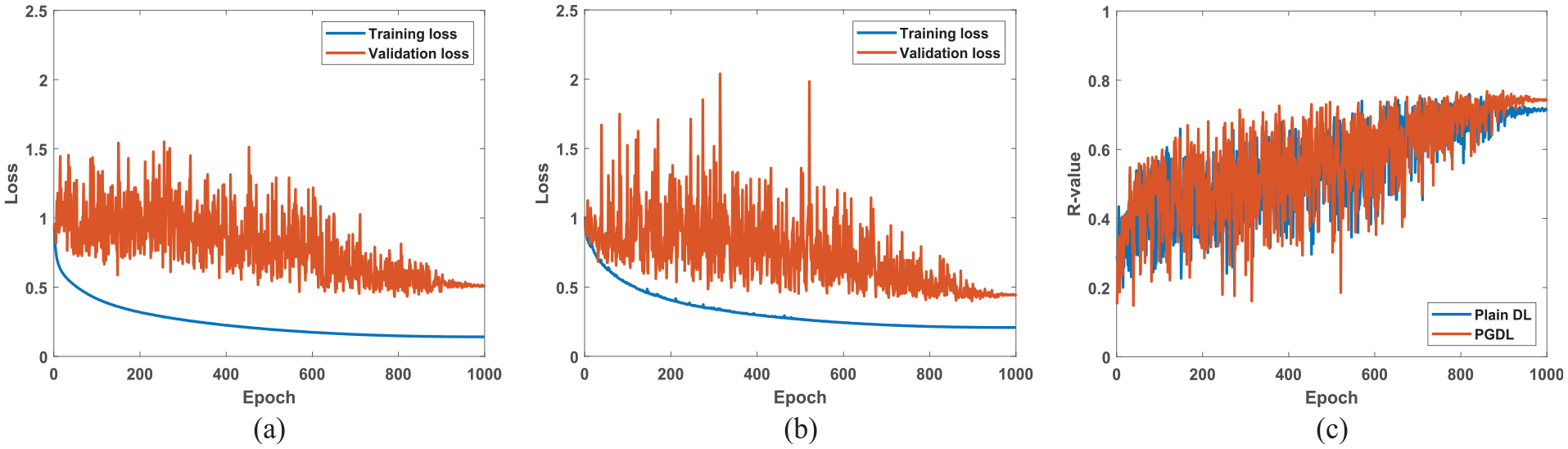
Loss and R-value curves of plain DL model and PGDL framework under condition 0: (a) loss curves of plain DL model, (b) loss curves of PGDL framework, and (c) R-value curves.
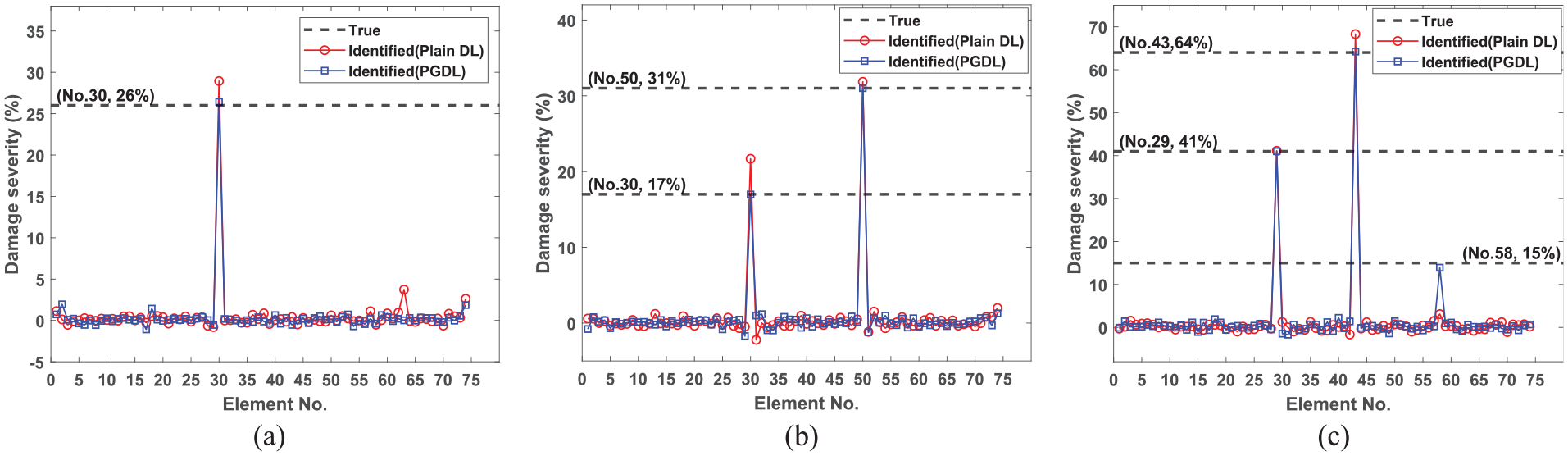
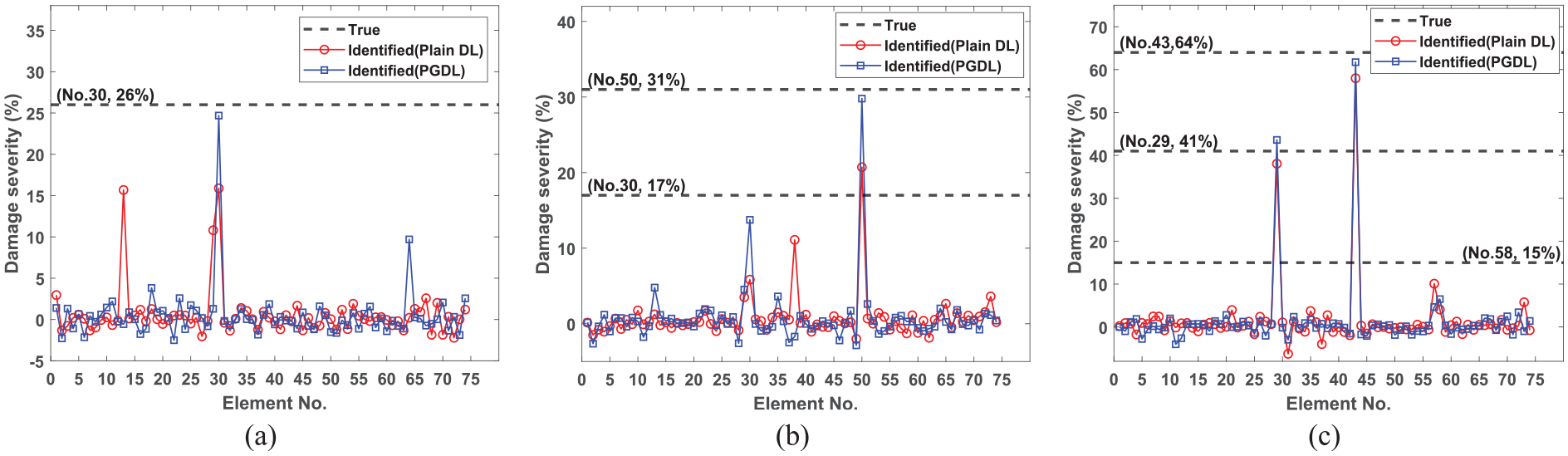
Typical damage identification results under condition 0: (a) one-element damage, (b) two-element damage, and (c) three-element damage.
From Figure 7, it can be observed that the validation loss curve of PGDL framework shows a more stable trend to gradually converge to the minimum value. In contrast, the curve of plain DL model illustrates an obvious increase in the initial training phase and then declines with many fluctuations. The gap between the training and validation loss curves of PGDL framework is narrower than plain DL, which means PGDL framework can achieve a better fitting in the training dataset, and a better extrapolation in the unseen dataset. The results as shown in R-value curves based on testing dataset demonstrate that the proposed PGDL framework also shows more accurate predictions on the testing dataset than the plain DL model. The corresponding R-value curve of PGDL framework shows a significant increase during the training and reaches a higher value close to 1 at the end.
The typical damage identification results in Figure 8 also demonstrate that the proposed PGDL framework is of a great superiority in damage identification on different damage cases. For single-element damage case, two methods can both identify the damage elements well, but PGDL framework illustrates more accurate damage quantification results and less false detections. For example, an obvious error occurs at the No. 63 element for the single element damage case from the plain DL model, as shown in Figure 8(a). For two-element damage case, two methods detect the damage locations well, but the plain DL model cannot precisely identify the preset damage severity. Errors can be observed at No. 30 and 50 elements, which are 4.68 and 2.83%, respectively. Several false identifications exist, such as elements No. 13 and 31 for the plain DL model, as shown in Figure 8(b). However, the false detections from the PGDL framework are less. In terms of the three-element damage case, the plain DL model shows a poor damage identification result at No. 58 element, as well as inaccurate severity estimation at No. 43 element. However, the proposed PGDL framework still identifies the damage locations and extents with a high accuracy.
Condition 1: Noise interference
This subsection aims at evaluating the damage identification performance of the proposed approach under the condition of noise interference. According to Equation (28), 30% noise is applied to the input data. The loss curves from training and validation datasets, and R-value curves based on testing dataset are depicted in Figure 9, and the typical damage identification results are illustrated in Figure 10 to evaluate the damage identification performance of two methods in detail under the 30% noise interference.
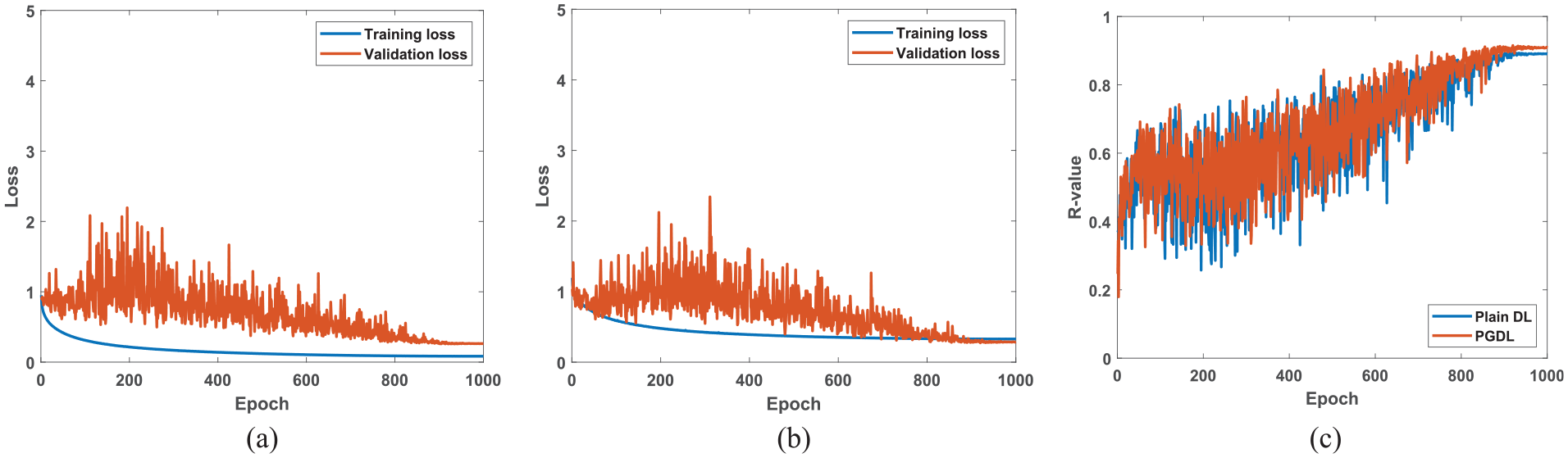
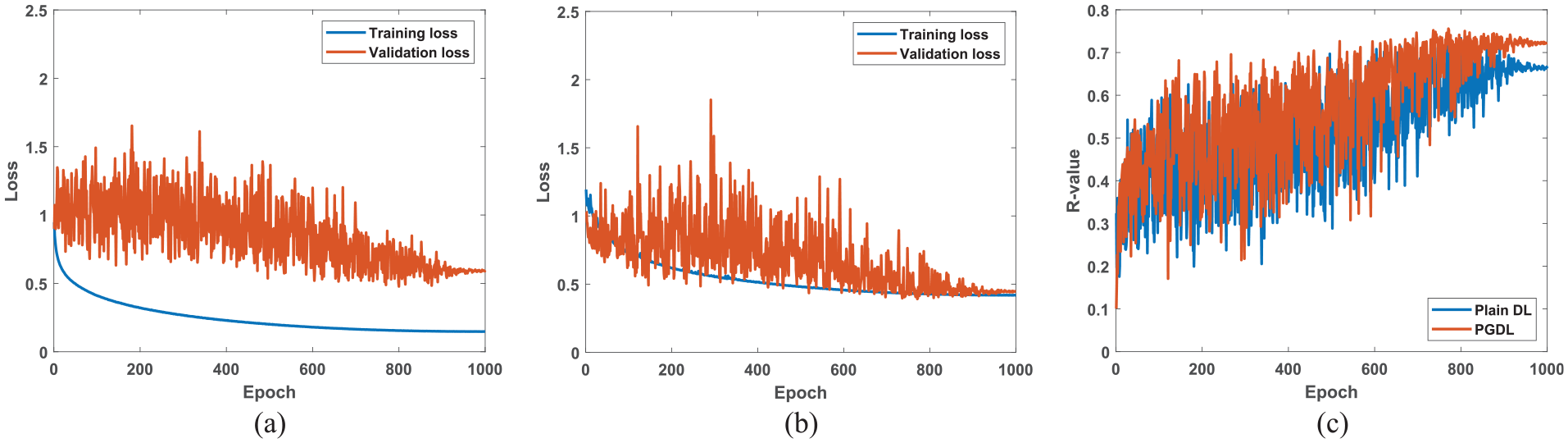
Loss and R-value curves of plain DL model and PGDL framework under 30% noise interference: (a) loss curves of plain DL model, (b) loss curves of PGDL framework, and (c) R-value curves.
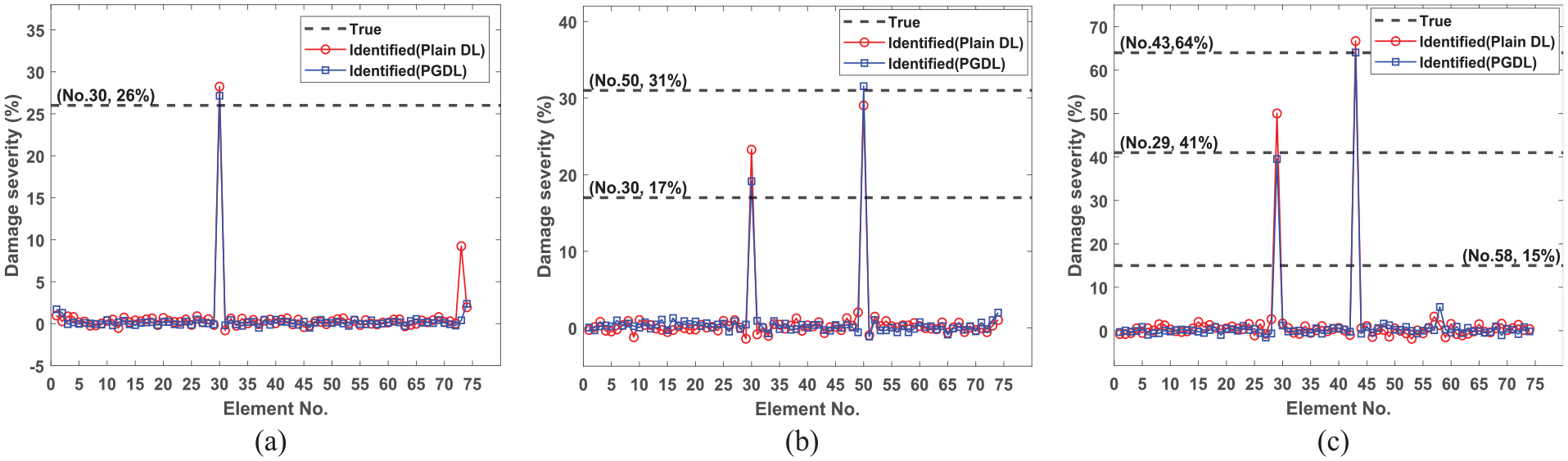
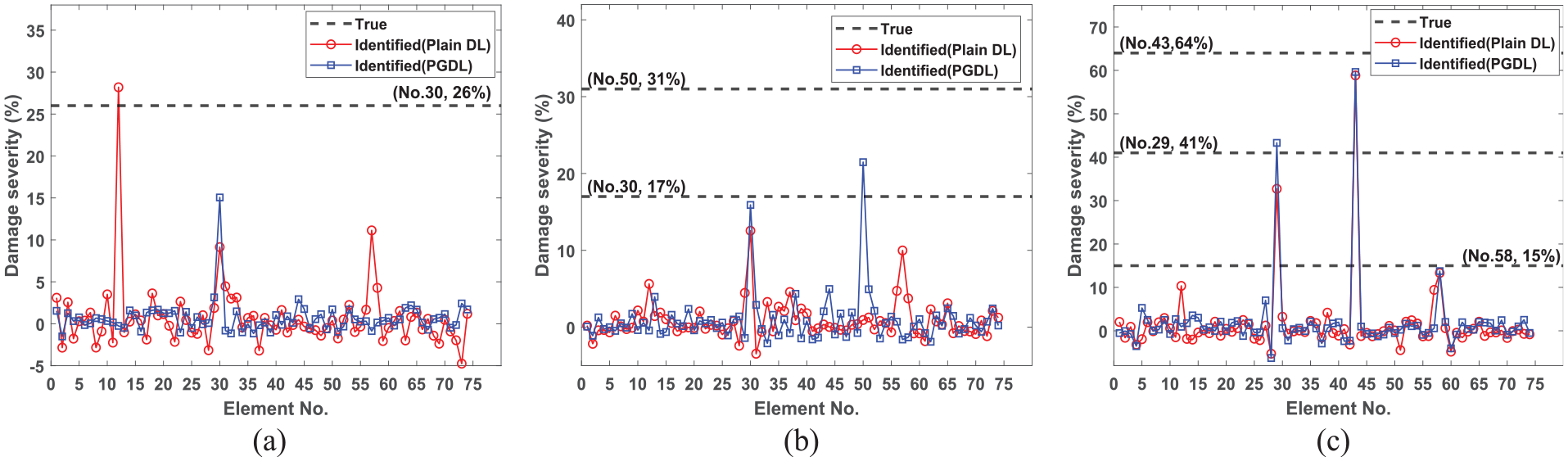
Typical damage identification results under 30% noise interference: (a) one-element damage, (b) two-element damage, and (c) three-element damage.
Figure 9 illustrates the curves of training loss, validation loss, and R values of two methods under 30% random noise. It can be observed that the validation loss curve of the proposed PGDL framework under the noise condition shows fewer fluctuations than the validation loss curve of plain DL model. At the end of the training, the gap between the training and validation loss curves of the proposed PGDL framework are all narrower than the curves of the plain DL model, which means the proposed PGDL framework achieves a better training as well as a superior prediction ability in the testing data. The superiority of the proposed PGDL framework can be attributed to the introduction of the physics-based loss function, which applies constraints on the training process of the network to avoid overfitting to some extent and then lead to a better performance in the damage prediction. For the R-value curves, the R value at the end of the training iteration of the proposed PGDL framework under noise condition is also higher than that of the plain DL model, which further proves the contribution of the physics-based loss.
Regarding the typical damage identification results in Figure 10, it can be seen that the noise interference brings a challenge to the two methods. Compared to the results of Condition 0, the damage quantification errors increase. With noise interference, the identification results of the plain DL model are affected, such as obvious false detections in No. 73 and No. 74 elements for the single-element damage case, false detection in No. 58 element for the three-element damage case, and less accurate damage severity quantifications. However, not only the identification results obtained from the proposed PGDL framework are closer to the preset damage but also the number of false identifications in other elements are fewer than that of plain DL model. To summarize, the physics-based loss functions as a scientific constraint in the training process of the network enhances the damage localization and quantification abilities of the network under noise effect.
Condition 2: Sparse measurement
In this section, fewer measurement points are considered. Only five sensors are used to obtain mode shapes for damage identification. Therefore, the generated mode shapes are preprocessed based on Equation (29) to obtain the sparse mode shapes and serve as the input to the network, which aims to simulate the situation with limited number of sensors.
Figure 11 illustrates the curves of training loss, validation loss, and R value of plain DL model and the proposed PGDL framework under the sparse measurements. It can be seen that the sparse measurements have a more serious negative influence on the training of the network. The fluctuations in the R-value curves are more obvious, and there are more false detections in the typical damage identification results. However, due to the introduction of the physics-based loss function, the overfitting when using sparse measurements is strongly improved. Since only five sensors are adopted to obtain mode shapes to identify the damage of 74 elements, the known information used for damage identification is very few compared to the unknowns to be identified. This is a serious ill-posed problem in the optimization analysis. Obvious gaps exist between the training and validation loss curves in the plain DL model. In contrast, the proposed PGDL framework can achieve well-fitting at the end of the training epoch, which can be observed not only in the narrower gap between the training and validation loss curves but also in the final higher R value.
Loss and R-value curves of plain DL model and PGDL framework under sparse measurement: (a) loss curves of plain DL model, (b) loss curves of PGDL framework, and (c) R-value curves.
In addition, as shown in Figure 12, although these two methods can localize the damage for the single-element and two-element damage cases effectively, more accurate quantification results are observed by using the proposed PGDL framework and the plain DL model shows more false detections. For the three-element damage case, the minor damage in No. 58 element is not accurately identified by the plain DL model. In contrast, the proposed PGDL framework provides better results for the damage extent quantification. To summarize, the introduction of the physics-based loss function illustrates a good ability to overcome the damage identification difficulty stem from the sparse measurement, and then to obtain more accurate damage quantification results.
Typical damage identification results under sparse measurement: (a) one-element damage, (b) two-element damage, and (c) three-element damage.
Condition 3: Noise and sparse measurement
Both noise interference and sparse measurements are applied to the input data to simulate the hard data collection situations in practice. Then the polluted dataset is used to further validate the proposed approach. The datasets are subjected to 30% noise, and only five sensors are considered in the sampled mode shapes.
The curves of training loss, validation loss, and R value of the plain DL model and PGDL framework under the 30% noise and sparse measurements are shown in Figure 13. It can be observed that the proposed PGDL framework can achieve a better fitted network based on the training dataset. However, overfitting exists in the plain DL model. The gap between the training and validation loss curves is obvious. From the R-value curves, it can be seen that the PGDL framework is able to obtain a higher R value than the plain DL model, which means the prediction from the PGDL framework is expected to be better.
Loss and R-value curves of plain DL model and PGDL framework under 30% noise and sparse measurements: (a) loss curves of plain DL model, (b) loss curves of PGDL framework, and (c) R-value curves.
For the typical damage identification results as shown in Figure 14, the accuracy of damage localization and quantification is decreased due to the random noise and sparse measurement. It can be observed that there are numerous tiny errors in the identification results. Even some false detections occur in the results from these two methods. For example, in Figure 14, serious false identifications from the plain DL model are observed at No. 10, No. 12, No. 57, No. 58, and No. 73 elements of single-element damage case; No. 12, No. 29, No. 56, No. 57, and No. 58 elements of two-element damage case; No. 12 and No. 57 elements of the three-element damage case. However, the proposed PGDL framework can localize the damage element and quantify the damage extent better than the plain DL model. Hence, the results demonstrate that the physics-based loss function enhances the noise-robustness and damage identification capacity of DL methods.
Typical damage identification results under 30% noise and sparse measurements: (a) one-element damage, (b) two-element damage, and (c) three-element damage.
Moreover, the calculation process of the proposed physics-based loss function increases computational cost in the network training, which means that the training time may increase. Based on the adopted desktop computer (Intel Core i9-10920X (Intel Corporation, Santa Clara, CA, USA), NVDIA RTX A4500 (20GB memory) and 64GB RAM), the computational cost of the proposed method is evaluated. The code is programmed based on PyTorch 0.15.2 and run in PyCharm integrated development environment (IDE). When the initialization time of PyCharm IDE is removed, the average training time of each epoch for plain DL and PGDL methods are extracted for a comparative study. For each epoch of plain DL method, the time cost range is between 7.11 and 11.009 s, and the average time cost is 8.85 s. For PGDL method, they are 10.893–15.035 and 12.423 s, respectively. The abovementioned comparison indicates that the introduction of a physics-based loss function only causes a very slight increase in the computational cost of each epoch, owing to the parallel computing capability of Graphics Processing Unit (GPU). However, the damage identification accuracy is improved by using the physics-based loss function.
Example II: I-40 steel-concrete composite bridge
Experimental description
For the verification of practicability of the proposed approach, a classical benchmark civil engineering structure, called I-40 bridge, is adopted in this section. I-40 bridge is a steel-concrete composite bridge, located in Albuquerque, New Mexico, USA. Twenty-six acceleration sensors are placed on the deck to acquire acceleration responses with a sample frequency of 64 Hz. The sampling duration is set as 16 s for each test. 62 The collected data from multiple times measurements are used for modal identification to obtain the average results of modal parameters. The cuts were used to introduce damage to the north plate girder at the middle span. Four damage cases with different damage extents were considered, which are 5, 10, 32, and 92%, respectively. 50 More details can be found in Farrar et al. 62 The front view, sensors layout, and damage introduction are depicted in Figure 15.
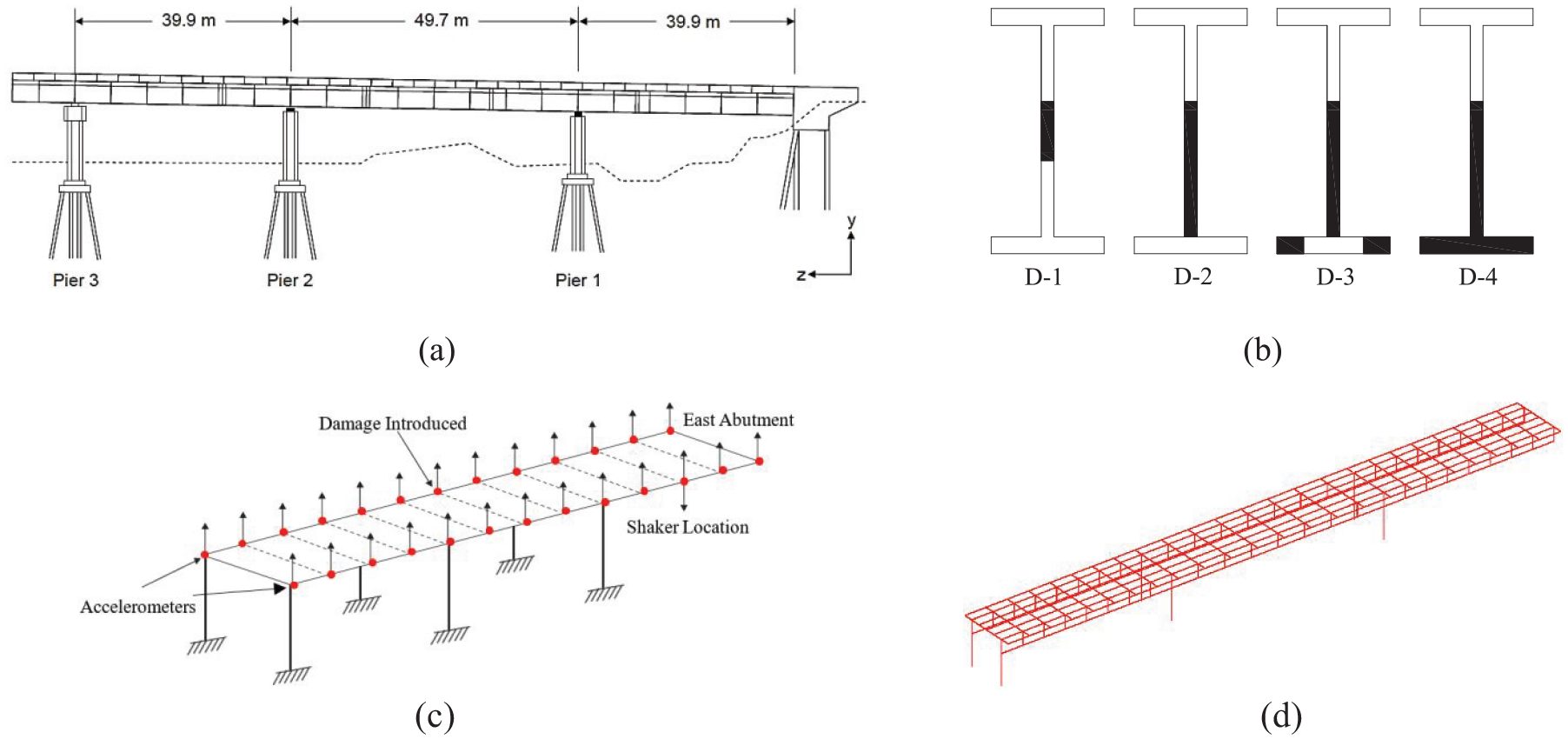
Front view, experimental setup, damage cases, and FEM of I-40 bridge: (a) front view of I-40 bridge, (b) four damage cases, (c) the layout of sensors, and (d) FEM.
Baseline FEM
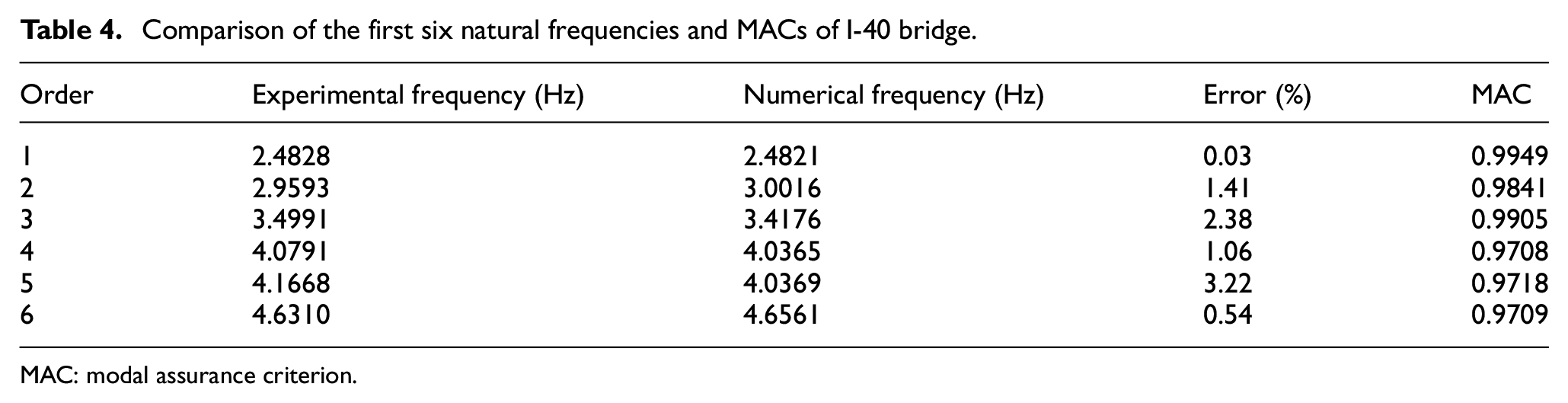
Referring to the vibration test report and the construction data, the FEM is developed based on MATLAB package. For the deck and plate girder, the four-node shell element is adopted, and two-node 3D beam element is exploited to simulate stringers, floor beams, and flanges of the plate girder. The bridge supports are modeled using spring elements with different spring constants in different directions. The details of FEM can be seen in the study by Huang et al. 17 There are a total of 524 elements and 687 DOFs, which can be considered as a large-scale structure. Then the dynamic condensation method is used to reduce the DOFs in rotational direction to reduce the computational cost, and the modal sensitivity matrices of the reduced model are calculated. Then, the initial FEM is updated based on optimization algorithm to obtain the benchmark model. Figure 15(d) and Table 4 illustrate the diagram of FEM and the experimental and numerical modal parameters, respectively.
Comparison of the first six natural frequencies and MACs of I-40 bridge.
MAC: modal assurance criterion.
From Table 4, it can be observed that the updated model shows an excellent consistency in vibration characteristics between the FEM and the actual engineering structure. The maximum error in the first six natural frequencies is 3.22%, and the MAC values are all higher than 0.97. Thus, the model can be determined as baseline model for the subsequent damage identification.
Data generation and network training
It is noted that only single-element damage is introduced at the plate girder of the real structure in experimental tests of this bridge structure. Identifying the damage in a large number of structural elements brings significant difficulty and high computational costs. Therefore, the range of selected elements for damage identification is limited to elements of the north and south plate girders, with a total number of 48 elements. Different single-element damage cases are distributed randomly between 48 elements of the north and south plate girders with a severity of 5–95%. The first six order natural frequencies and mode shapes are obtained to form the training dataset. It should be noted that only 26 vertical points of each mode shape are gathered for consistency with the practical measurement locations. The total sample number is 14,400. The same data processing procedures are applied to the input and output data, such as reshape and Z-score normalization. Curves of the training and validation losses and R value are adopted to evaluate the effectiveness of the proposed approach integrating the physics-based loss function. The dataset generated based on FEM analysis is split into training, validation, and testing datasets for obtaining the training loss curve, validation curve, and R-value curve, respectively. The split ratios are the same as those in example I. When the well-trained network is obtained, the measured modal data from real damage situations introduced in this girder, including natural frequencies and mode shapes of those four damage cases, are used as input to the well-trained network for investigating the accuracy of the proposed approach for damage identification with real measurement data. Considering the complexity of I-40 bridge, the training epochs are determined as 2500. The batch size and learning rate are 128 and 1e−5, respectively. Adam optimizer is used for network training, cosine annealing learning rate schedule is adopted to gradually decrease the learning rate to zero within 2500 epochs.
Damage identification results
The training and validation losses and R-value curves of two methods used for damage identification of I-40 bridge are illustrated in Figure 16. It can be observed that the proposed PGDL framework can obtain a smaller loss during the network training, which means the introduction of physics-based loss function can improve the fitting performance of the network. Meanwhile, at the end of training, it has a very narrow gap between the training and validation curves from the results of the PGDL, which also demonstrates that the network is well trained. The R value of the proposed approach in the training process is always higher than that of plain DL model.
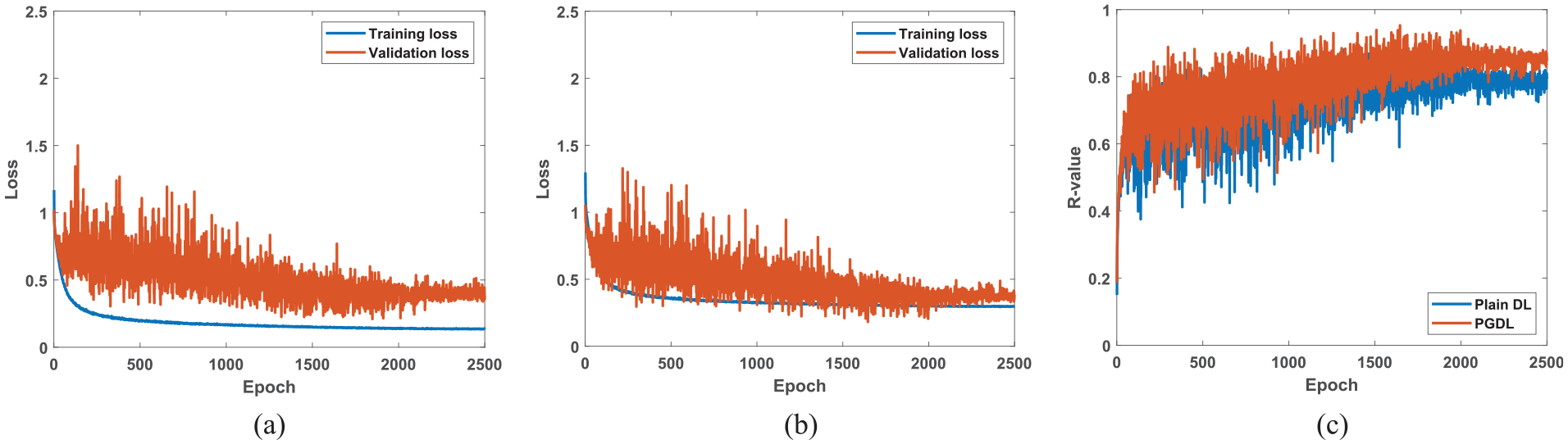
Loss and R-value curves of plain DL model and PGDL framework of I-40 bridge: (a) loss curves of plain DL model, (b) loss curves of PGDL framework, and (c) R-value curves.
After the network is trained well, the measured modal parameters of the damaged structure are used as input to the well-trained network to identify the damage for examining the performance and accuracy of the proposed approach. The identification results are shown in Figure 17. Overall, it can be seen that there are many identification errors in the results, owing to the uncertainties, including modeling errors, ambient temperature variations, and measurement noise. For D-1 case, two methods detect the damage location well. It should be noted that the identification result of the plain DL model is not obvious and is prone to be masked by uncertainties. However, the identification results from using the proposed PGDL framework can identify the true damage well, which further proves the superiority and improvement of introducing the physics-based loss. For D-2 case, the plain DL model shows a significant error at No. 24 element, which corresponds to the middle span at the south plate girder of I-40 bridge. In contrast, the PGDL framework still shows an accurate damage localization result. It should be noted that in D-1 and D-2 cases, even with the significant uncertainty effect as evidenced by the results from the plain DL model, the identification results obtained from the proposed approach show that accurate damage severities can be identified in these two cases. Furthermore, for D-3 and D-4 cases, the proposed PGDL framework achieves more accurate damage extent estimation than the plain DL model. More accurate damage quantification results are also obtained. Less false identifications are observed in D-3 and D-4 cases, since more significant damages are introduced in these two cases. Compared to the plain DL model, the PGDL framework can achieve more accurate damage identification results, demonstrating a good robust performance.
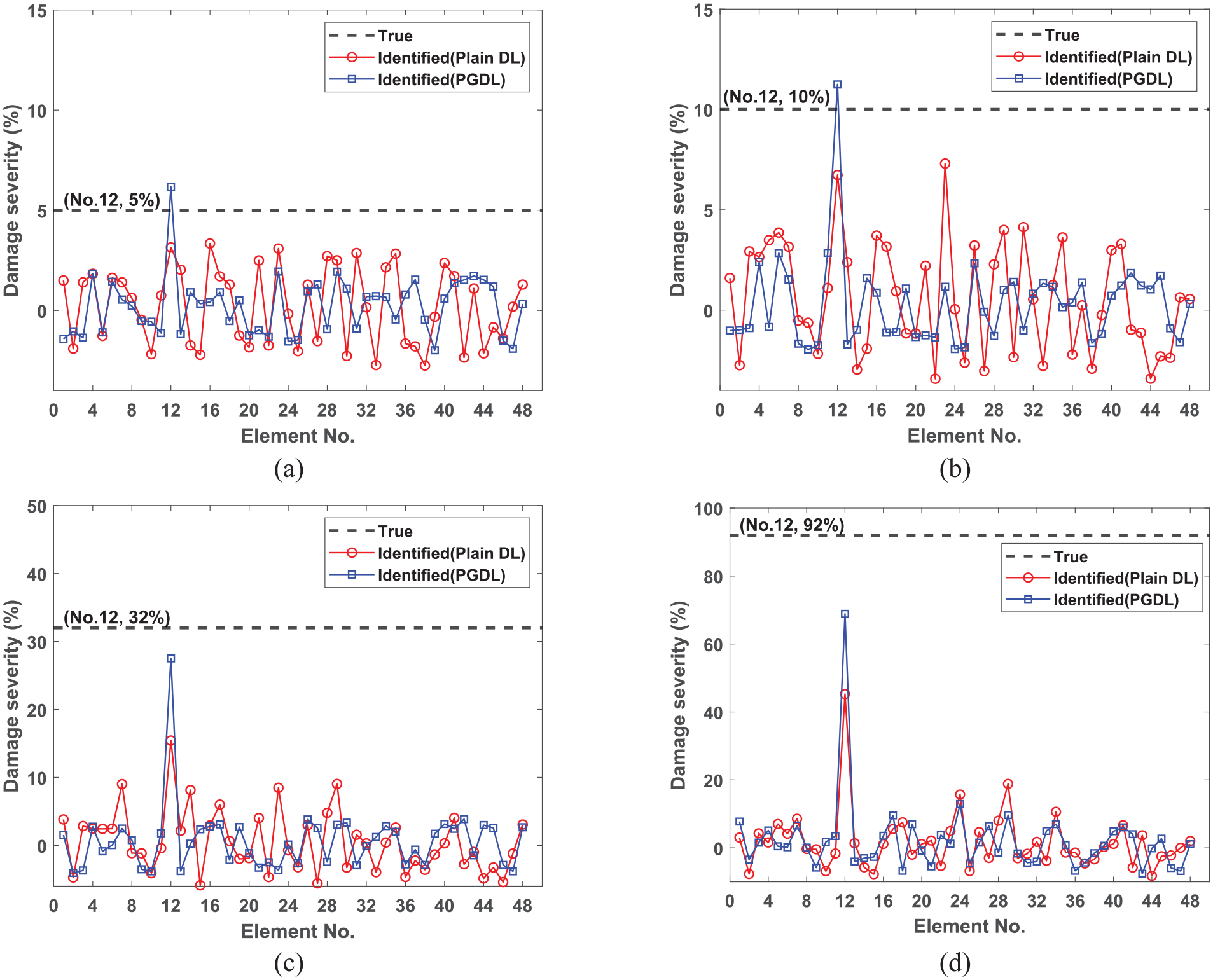
Damage identification results of I-40 bridge based on measured modal data: (a) D-1, (b) D-2, (c) D-3, and (d) D-4.
The obtained results demonstrate that the introduction of physics-based loss can provide a promising optimization direction for network training, leading to a better stability during the training process and a good fitting ability of the network after the training. The proposed PGDL framework shows a superior capacity in damage localization and quantification, which has a good potential for the practical application to large-scale engineering structures.
Conclusions and recommendations
In order to tackle the damage identification of large-scale structures, this article first proposes a novel PGDL framework based on modal sensitivity of large-scale structure and model reduction techniques. The proposed PGDL framework is constructed by introducing a physics-based loss function. This physics-based loss function is deduced based on modal sensitivity of large-scale structures to improve the network performance on damage identification of large structures. The curves of training and validation losses and R value are exploited to evaluate the effectiveness of the introduced physics-based loss function. The effect of some common interferences in damage identification, including random noise and incomplete measurement, is investigated. The well-trained network is adopted to identify structural damage location and extent based on measured modal parameters of the actual structure.
A numerical continuous rigid frame bridge and an experimental steel-concrete composite bridge are adopted to validate the damage identification performance of the proposed PGDL framework. The results of the numerical examples demonstrate that the proposed approach can accurately identify the damage location and severity under interferences of noise pollution and sparse measurements. The proposed PGDL framework also illustrates better training stability and damage identification results than the plain DL model. This study demonstrates that introducing physics-based loss can overcome the decline of damage identification accuracy under multiple interference effects, including random noise and sparse measurement. Only the first-order modal sensitivity is adopted for this study, and the introduction of high-order sensitivity analysis may further enhance the accuracy of damage identification results. The potential of extending the proposed PGDL framework for other large-scale structures, such as long-span cable-stayed bridges and high-rise buildings, can be further explored.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The first author acknowledges China Scholarship Council Postgraduate Scholarship (CSC 202108420021) to conduct his PhD study in the School of Civil and Mechanical Engineering at Curtin University. The support from Australian Research Council Discovery project DP210103631, “AI Assisted Probabilistic Structural Health Monitoring with Uncertain Data,” is also acknowledged.