
Abstract
Across nondestructive testing and structural health monitoring (SHM), accurate knowledge of the systems’ reliability for detecting defects, such as probability of detection (POD) analysis is essential to enabling widespread adoption. Traditionally, this relies on access to extensive experimental data to cover all critical areas of the parametric space, which becomes expensive, and heavily undermines the benefit such systems bring. In response to these challenges, reliability estimation based on numerical simulation emerges as a practical solution, offering enhanced efficiency and cost-effectiveness. Nevertheless, precise reliability estimation demands that the simulated data faithfully represents the real-world performance. In this context, a numerical framework tailored to generate realistic signals for reliability estimation purposes is presented here, focusing on the application of guided wave SHM for pipe monitoring. It specifically incorporates key characteristics of real signals: random noise and coherent noise caused by the imbalance in transducer performance within guided wave monitoring systems. The effectiveness of our proposed methodology is demonstrated through a comprehensive comparative analysis between simulation-generated signals and experimental signals both individually and statistically. Furthermore, to assess the reliability of a guided wave system in terms of the inspection range for pipe monitoring, a series of POD analyses using simulation-generated data were conducted. The comparison of POD curves derived from ideal and realistic simulation data underscores the necessity of considering coherent noise for accurate POD curve calculations. Moreover, the POD analysis based on realistic simulation-generated data provides a quantitative estimation of the inspection range with more details compared to the current industry practice. Our presented framework offers a pioneering approach to generate realistic guided wave signals, thereby facilitating the practical assessment of the reliability of guided wave monitoring systems. This advancement also has the potential to effectively address challenges related to data scarcity in broader applications requiring high-fidelity data, such as the training of machine learning models for damage identification from complex signals for all aspects of ultrasonic inspections with both guided and bulk waves.
Keywords
Introduction
Ultrasonic inspection has broad impact in industry for being a safe, subsurface modality. Within this, guided wave testing is a highly appealing nondestructive testing (NDT) method, particularly for inspecting large structural areas, owing to its ability to cover significant portions of a structure from a single transducer location. Its applications in the inspection of pipelines within the oil and gas industry have been well established.1,2 Recent advancements in permanently installed transducers have made it increasingly attractive to transition from periodic NDT inspections to structural health monitoring (SHM), which promises enhanced reliability and a reduction in the operational costs typically associated with regular inspections.3–6 In addition, fully automating the monitoring can significantly reduce the operational risks for personnel and operators. Despite the progress made in advancing guided wave SHM from laboratory experimentation to practical industrial applications, 7 the assessment of reliability remains a critical step for its widespread deployment in industry.8–10 Conventional reliability estimation methods, such as probability of detection (POD) analysis, 11 rely on a statistically significant number of experimental trials, which involve manufacturing representative samples with various flaw sizes and measuring them under realistic conditions. The challenge lies in the expense and time intensiveness of experimental approaches to establish reliability estimates.
In response to this challenge, the concept of model-assisted probability of detection (MAPOD) was introduced,12,13 aiming to substitute empirical experiments with physics-based theoretical or numerical models for reliability estimation, thereby effectively reducing the cost and time associated with sample fabrication and experimentation. Since its introduction, the MAPOD method has garnered considerable attention and has been extensively explored in the realms of NDT14,15 and SHM.16,17 Early employment of MAPOD has been applied in the POD estimation of eddy current inspection 18 and ultrasonic measurement. 19 There have also been several implementations of MAPOD in ultrasonic guided wave inspection. Moriots studies 20 used a simplistic finite element (FE) model to calculate the POD and possibility of location curves for assessing the performance of a guided wave-based SHM imaging system. Howard and Cegla21,22 applied a MAPOD approach to evaluate the capability of short-range circumferential guided waves in detecting corrosion damage in the pipe. More recently, a simulation tool based on the CIVA simulation platform has been developed for the calculation of POD curves, demonstrating several successful applications in aerospace inspection. 23 While numerical tools offer the flexibility to generate data with varying configurations compared to theoretical models, the challenge remains in fully capturing the effects of practical measurement conditions.
The accuracy of the reliability estimation relies on the fidelity of the model-generated data, which are required to accurately capture the complexities of real experimental data, which are inherently noisy. Efforts have been made in the literature to make the simulation-generated data more realistic. For example, Gaussian white noise is commonly added to simulation data to generate noisy data. 24 However, actual experimental signals not only exhibit random noise but also coherent noise due to imperfect guided wave excitation conditions. In Marianis study, 25 variations in the amplitude of the excitation signal, representing the imbalance of transducer performance, were used to model the coherent noise in the fundamental torsional mode, known as the T(0,1) mode, signals. However, phase variations also exist alongside amplitude variations, again due to inherent transducer imbalance, 26 and the performance of the transducers is also influenced by varying environmental conditions, thereby influencing the noise levels in the signal. Liu et al. 27 proposed a hybrid data generation framework to model the environmental effects, which superpose experimental data collected under different environmental conditions on an undamaged structure with artificial damage signals. However, the influence of environmental conditions on the artificial damage responses themselves and the distortion of coherent noise caused by mode conversions and reverberations from the defect were not taken into account, making the synthetic signals less representative of the real signals. More recently, generative adversarial networks based models have emerged as a promising method for data generation, 28 yet the training process requires a substantial amount of data, and the generated signals lack practical explainability.
Despite the promising potential of model-generated data in estimating the reliability of guided wave monitoring systems, a high-fidelity model for generating guided wave signals remains underdeveloped. Therefore, this article aims to establish, for the first time, a comprehensive numerical framework for generating realistic guided wave signals, informed by a thorough understanding of noise characteristics and contributors, with a focus on guided wave SHM for pipe monitoring. The simulation-generated realistic guided wave signals are then used to assess the performance of a guided wave pipe monitoring system in terms of the inspection range via POD analysis. Our presented framework offers a pioneering approach to generate realistic guided wave signals, and in addition to the benefits for assessing the reliability of guided wave monitoring systems, this step-change in capability will be vital for providing data for training machine learning models for damage identification from complex guided wave signals, as well as for training and assessment of human operators. While the focus in this article is specifically on guided wave pipe monitoring applications, the techniques developed here are also applicable, with few changes, to other areas of inspection and monitoring across a range of modalities.
The subsequent sections are structured as follows: “Real guided wave signals and noise” section presents a comprehensive analysis of noise, encompassing coherent noise and random noise, based on experimental data. “Methodology” section outlines the proposed numerical framework for generating realistic guided wave signals, including simulation and experimental validations, along with an error analysis. In “Reliability estimation” section, a quantitative estimation method for determining the inspection range of a guided wave SHM system for pipe monitoring is detailed, based on simulation data generated from the proposed numerical framework in this study. Finally, the article concludes with a summary in “Conclusion” section.
Real guided wave signals and noise
Standard metallic pipe monitoring based on guided waves operates by transmitting a single guided wave mode and subsequently identifying the scattering waves arising from any irregularities within the pipe. A well-established approach for pipe monitoring is based on the T(0,1) mode, with frequencies typically under 150 kHz. This wave mode is nondispersive, simplifying the interpretation of guided wave signals. Nevertheless, the guided wave signals in real pipes are nearly always contaminated by noise, which potentially obscures scattered waves from defects, masking the desired signals and complicating interpretation. Therefore, the performance of a guided wave monitoring system relies on the system’s capability to differentiate between scattering waves originating from structural discontinuities and the underlying noise.
Figure 1 illustrates a typical guided wave signal acquired and processed by a commercial guided wave monitoring system from Guided Ultrasonics Ltd. (Brentford, UK). According to the ASTM standard practice for guided wave testing of steel pipework, 29 distance amplitude correction (DAC) curves are used to assess the attenuation and amplitude reduction over wave propagation distances, aiding in the assessment of damage extent, particularly in terms of pipe’s cross-sectional change (CSC). In Figure 1, DAC curves (dotted lines) were generated during postprocessing using the Absolute Calibration method, 30 based on known pipe features such as welds. The commonly used DAC curves include Flange DAC, Weld DAC, and Call DAC. Flange DAC illustrates the anticipated amplitude reflected from a feature with an approximate 100% reflection coefficient, while Weld DAC demonstrates the anticipated amplitude reflected from a pipe girth weld, typically presenting 20%–25% CSC. The Call DAC level is generally established at roughly 6% CSC, representing the system’s sensitivity to detect the defect. Additionally, the noise level is illustrated as the dark gray area in Figure 1, and the detection threshold is typically set at 6 dB above the noise level to avoid false alarms in defect detection.
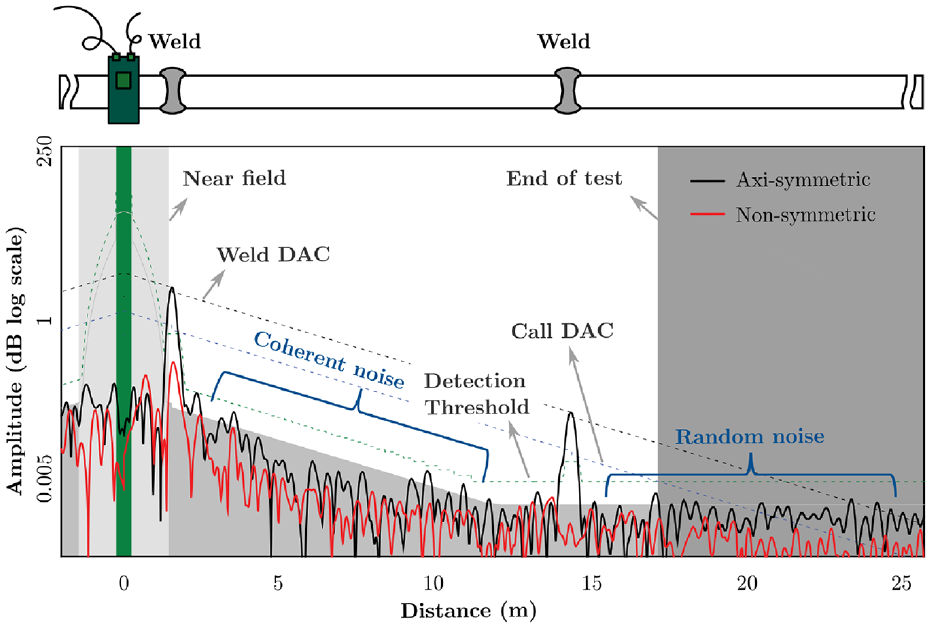
A typical guided wave signal (on the logarithmic scale) acquired by Guided Ultrasonics Ltd. (Brentford, UK) on a pipe with two weld features.
In Figure 1, the guided wave signals are displayed on the logarithmic scale and present both the axi-symmetric T(0,1) mode (shown in black) and the nonsymmetric flexural mode (shown in red). Nonsymmetric flexural modes arise from either direct excitation through nonaxisymmetric transduction or mode conversion, which happens when the axi-symmetric T(0,1) incident wave interacts with nonsymmetric features like simple supports. Alongside the reflections from the pipe weld features, discernible noise is also present. The noise within a guided wave signal consists of both random noise and coherent noise. 31 Random noise originates from the electrical interference of the measurement system or environmental vibrations and can be reduced through averaging multiple signals together; because of the stochastic randomness, the different realizations of random noise sum incoherently and are reduced in amplitude, while the features which remain constant between the measurements, such as defect responses, are enhanced. Coherent noise, on the other hand, results from physical wave behavior, such as the propagation of unwanted modes 32 or scattering from the pipe’s rough surface, and is constant between repeat measurements. Notably, random noise maintains a consistent amplitude with respect to distance from the transducer ring, whereas the amplitude of coherent noise diminishes with the wave propagation distance, manifesting a linear decay on the logarithmic scale due to damping and beam spread effect.
In this section, a comprehensive analysis of the noise signal is performed based on the guided wave signals collected from an experimental setup within controlled laboratory environment at a room temperature of around 23°C and humidity of around 25%. This analysis serves as the basis for the subsequent modeling of noise in the simulations for generating realistic guided wave signals.
Experimental setup
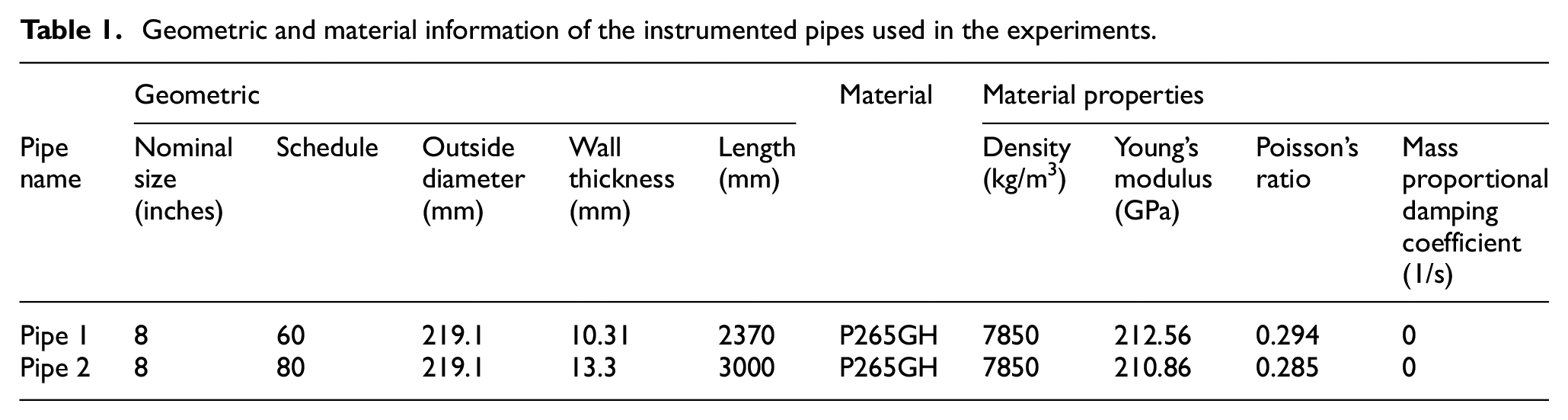
In the experiments, two American Petroleum Institute standard seamless carbon steel pipes of different sizes, Pipe 1 and Pipe 2, as listed in Table 1, were tested. The material properties of the pipes were referenced from a public engineering material database 33 but were calibrated based on the wave velocities measured experimentally to account for variations in material properties due to uncertainty in the exact processing parameters during manufacturing. Specifically, the shear wave velocity was determined by the time-of-flight (ToF) between two T(0,1) wavepackets reflected from the pipe end. The longitudinal wave velocity was determined by the reflections of the F(2,3) wave mode from the pipe end, achieved by matching the dispersion curve calculated using two F(2,3) wavepackets with the theoretical dispersion curve of the F(2,3) wave mode. The geometric and material information of the pipes is detailed in Table 1, and the experimental setup is illustrated in Figure 2.
Geometric and material information of the instrumented pipes used in the experiments.
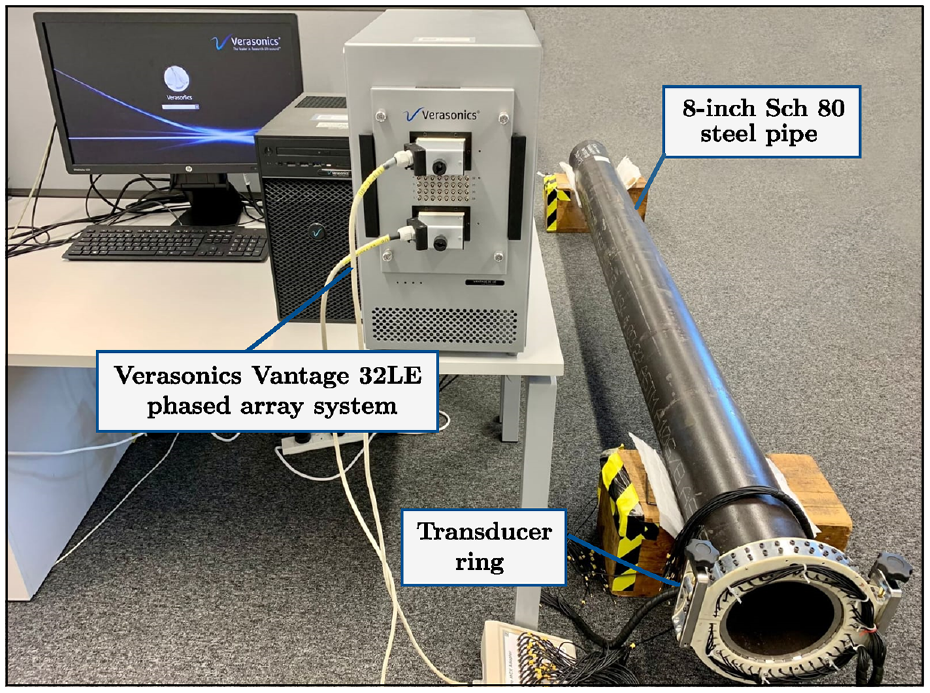
Experimental setup.
For the excitation and reception of the T(0,1) wave mode, a transducer ring with 40 equally spaced transducer elements, which apply shear forces in the circumferential direction, was installed at one of the ends of the pipe. This positioning allowed for the longest inspection range and avoided the need for directional control. The excitation signal was a five-cycle Hann-windowed toneburst signal with a central frequency of 50 kHz. The high number of transducer elements around the pipe circumference theoretically ensured the suppression of all flexural modes within the frequency of interest, as shown in the disperse curve in Figure 3. The dispersion curve was calculated based on Pipe 2 using Disperse. 34 The small interelement space, approximately 1/4 wavelength in size, ensured the formation of effective plane waves without the occurrence of grating lobes. 35 A Verasonics Vantage 32LE phased array measurement system was employed for signal excitation and reception, with a sampling frequency of 2 MHz. The collected experimental signals were filtered using a bandpass filter, with a lower frequency limit of 36 kHz and an upper frequency limit of 64 kHz, to eliminate extraneous noise beyond the frequency range of interest. The bandpass filter limits were determined through trials, adjusting the limits and assessing the noise level compared to the desired response from the system.
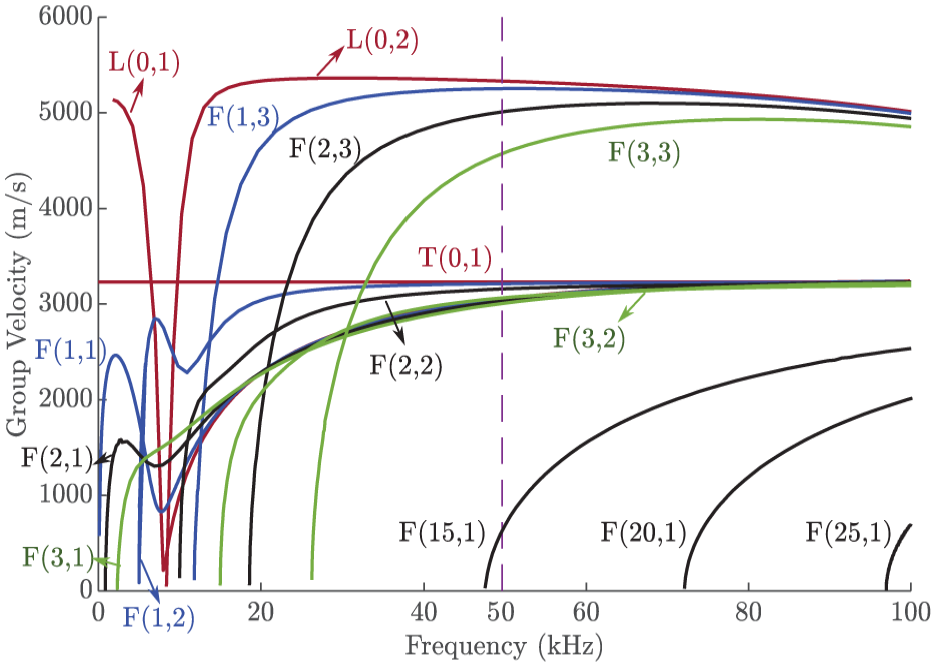
The group velocity dispersion curves of Pipe 2, an 8-inch Schedule 80 steel pipe.
The T(0,1) signals were collected using the common source method (CSM). 36 In the CSM arrangement, all transmitters were fired simultaneously to allow a plane wave to propagate axially. Simultaneously, signals from all receivers were captured and summed to obtain the T(0,1) signal.
Noise collection
Figure 4(a) presents a representative T(0,1) guided wave signal collected on Pipe 2, depicted on the logarithmic scale and acquired with an extended duration. The signal was divided into two zones based on the amplitude on the logarithmic scale. The initial segment of the signal is dominated by guided waves, exhibiting a linear decay in logarithmic amplitude due to material damping. The latter part of the signal is dominated by random noise, where guided wave signals dissipate sufficiently to a level below that of the random noise, maintaining a constant amplitude level. The random noise signal obtained from the later part is illustrated in Figure 4(b). The accompanying zoomed-in Figure 4(b) displays the random noise signal within a 1 m travelling range, exhibiting randomly varying amplitudes.
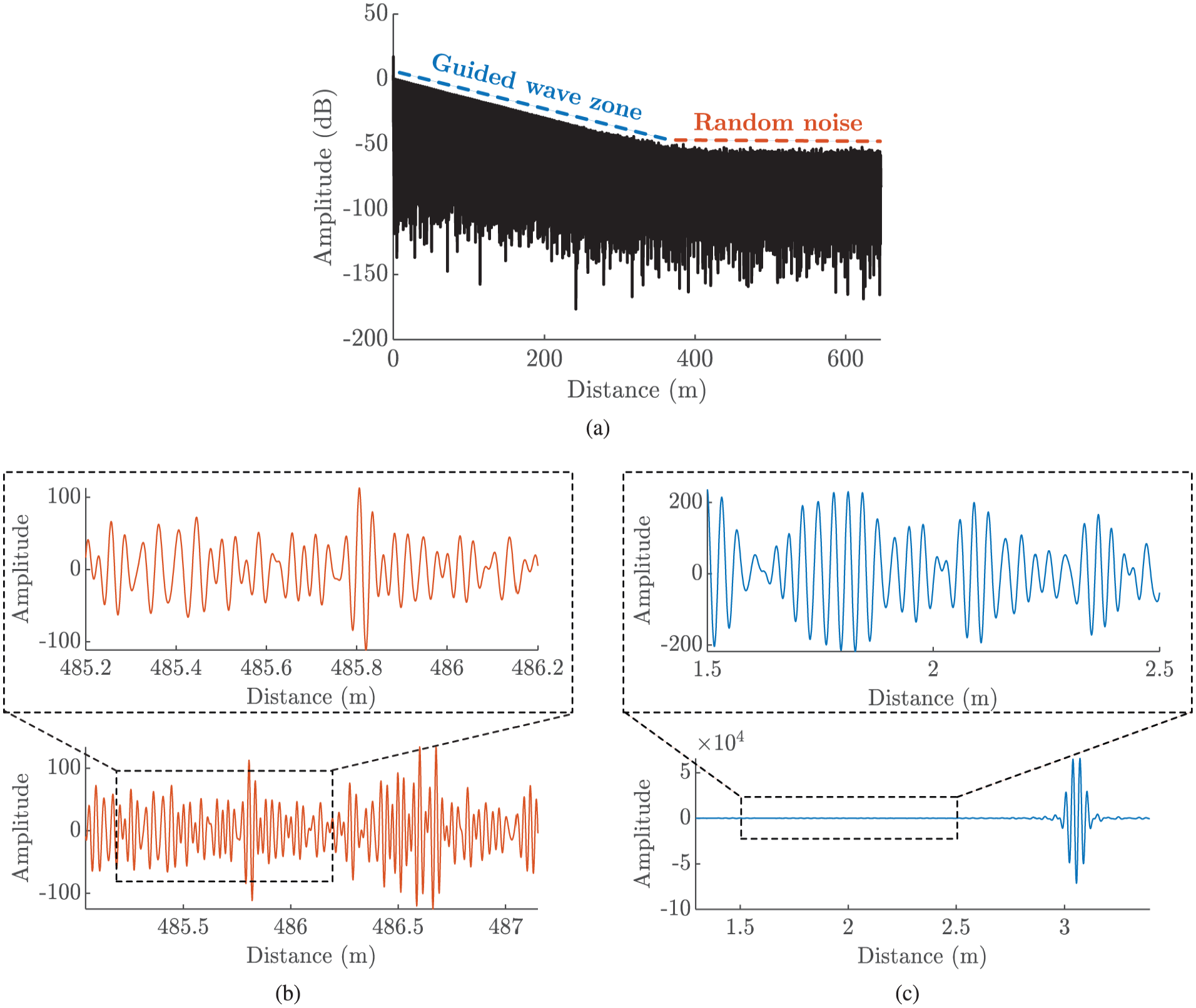
(a) A representative T(0,1) guided wave signal measured with an extended duration depicted on the logarithmic scale. (b) Random noise collected from the latter part of the signal where guided wave signals dissipate sufficiently to a level below that of the random noise. (c) The signal containing coherent noise and the first T(0,1) wave reflected from the pipe end.
The initial segment of the signal comprises numerous reverberations of T(0,1) reflected from pipe ends due to the short length of the pipe. Figure 4(c) shows the signal containing the first T(0,1) wave reflected from the pipe end at 3 m. In this segment, all components apart from the T(0,1) wavepacket reflected from the pipe end are identified as noise, comprising both coherent and random noise. A closer look in Figure 4(c) reveals that the noise in this part of the signal exhibits a particular wave pattern, likely caused by the coherent noise formed by guided waves rather than purely from random noise. It should be noted that the signal in Figure 4(b) was filtered by a bandpass filter, excluding the very low-frequency and very high-frequency components of random noise.
Random noise
Random noise is commonly represented using Gaussian white noise, 24 with its intensity primarily dependent on the measurement system and ambient environment. Figure 5 presents an analysis of the statistical characteristics of the random noise collected in the laboratory environment. Two fundamental statistical moments, namely Skewness and Kurtosis, were employed to gauge the deviation of the collected random noise distribution from normality.37,38 Skewness and Kurtosis are defined as

and

where
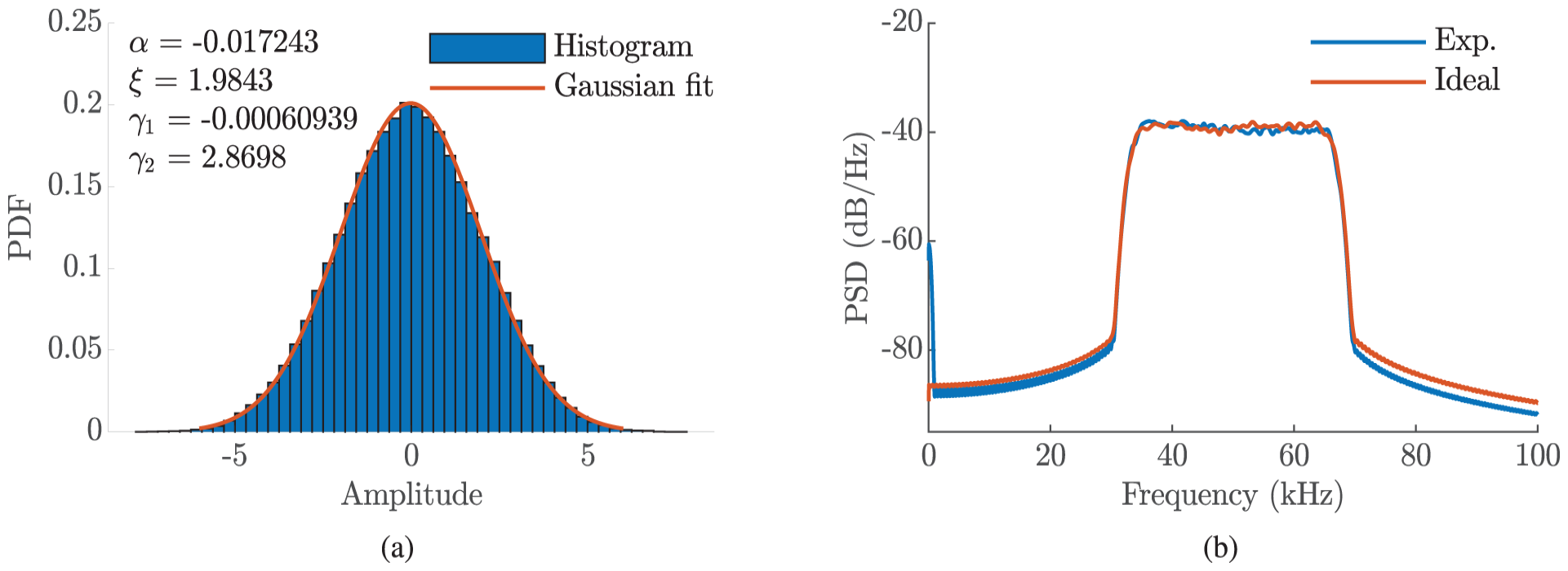
Statistical analysis of the random noise. (a) PDF of the random noise alongside the fitting of an ideal Gaussian distribution, where
Figure 5(a) presents the probability density functions (PDF) of the random noise alongside the fitting of an ideal Gaussian distribution. The shape of the PDF and the Skewness and Kurtosis values imply that the collected random noise follows a Gaussian distribution.
To assess whether the noise power spectrum remains white, the power spectral density of the random noise signal was computed and compared with that of an ideal Gaussian white noise possessing a comparable power level, both subjected to the same bandpass filter. The results in Figure 5(b) reveal that the spectrum of the recorded noise remains nearly constant within the frequency range of interest, confirming its white power spectrum.
To investigate the influence of transducer installation conditions, such as the coupling between transducer elements and the pipe surface, on random noise, the transducer ring was detached and reinstalled before data collection to introduce variability in the electro-mechanical coupling effect of the transducers. Figure 6(a) displays the root mean square (RMS) amplitude spectrum of random noise signals from 40 transducer channels under different installation conditions. Figure 6(b) shows the corresponding amplitude of the first T(0,1) wavepacket reflected from the pipe end. The data were collected from Pipe 1 and Pipe 2, as specified in Table 1, in different experiment sets. The RMS amplitude of random noise varies among transducer channels but maintains a consistent distribution across experiment sets. However, the amplitude of the first T(0,1) wavepacket reflected from the pipe end varies among transducer channels and changes with installation conditions in different experiment sets. This indicates that the signal-to-random noise ratio of the signal from different transducer channels depends on the transducer installation conditions.
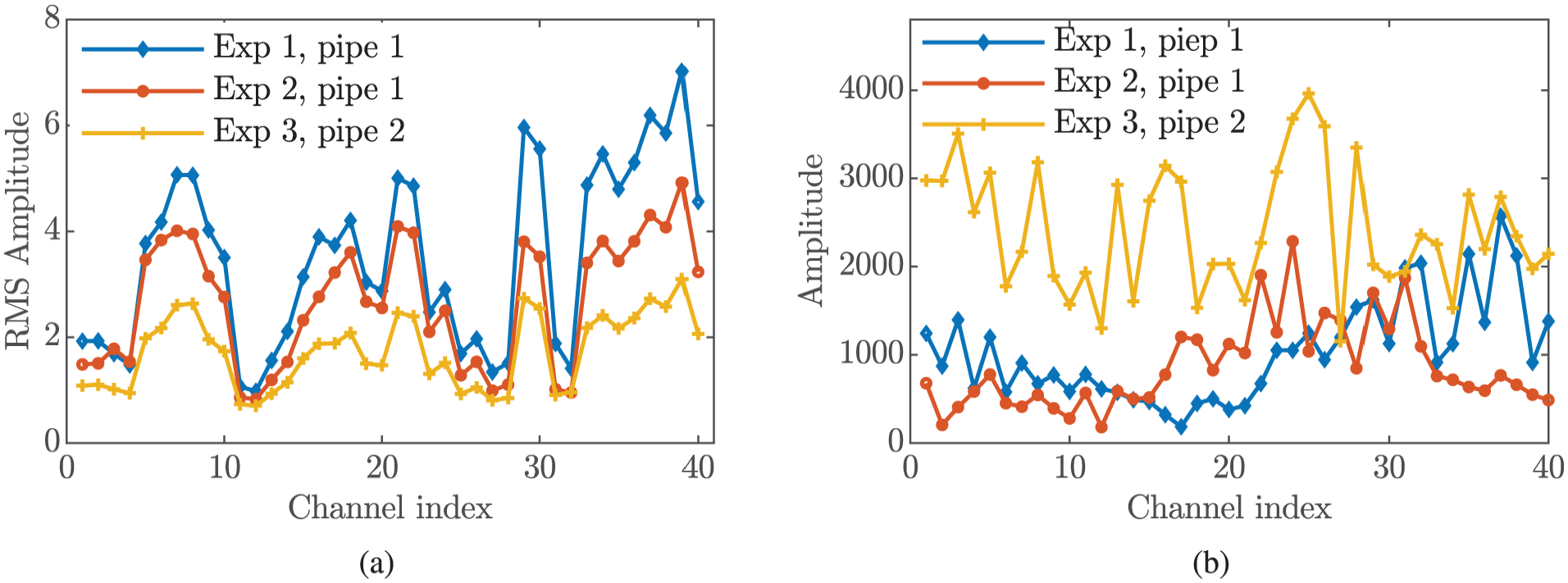
Influence of installation conditions on levels of random noise and the first T(0,1) wavepacket reflected from the pipe end. (a) RMS amplitude distribution of random noise signals from 40 transducer channels under different installation conditions. (b) The corresponding amplitude of the first T(0,1) wavepacket reflected from the pipe end from 40 transducer channels under different installation conditions.
Consequently, a Gaussian white noise model with limited bandwidth will be adopted to simulate random noise in the proposed numerical framework, generating realistic guided wave signals. The signal-to-random noise level at each transducer channel will be adjusted based on the first T(0,1) wavepacket reflected from the known pipe features, such as the pipe end in this study, obtained in the representative experiments.
Coherent noise
This section analyzes the characteristics and composition of coherent noise based on the experimental data collected on Pipe 2. To mitigate the influence of random noise, 21 averages were taken in the collection of experimental signals. After averaging 21 times, the signal exhibits a consistent appearance, and the effect of random noise is effectively eliminated. Although more averages theoretically reduce random noise, practical field measurements require balancing the number of averages with time constraints. Thus, 21 averages were chosen as a practical and sufficient compromise, aligning with common industrial practices.
Coherent noise in the T(0,1) guided wave signal arises from the imperfect cancellation of circumferential waves and the excitation of unwanted flexural modes due to variations in transducer performance. For the excitation of pure T(0,1) waves, all transducers need to exhibit the same response to cancel out circumferential waves and suppress axial flexural modes. However, practical imperfections in excitation and reception, such as limited measurement system bandwidth and uneven transducer coupling conditions, inevitably introduce variations in transducer response. It is important to note that the transducer response is determined by all the electrical and electro-mechanical components present in the measurement system, including the pulser, cables, transducers, amplifiers, and transducer coupling conditions. Therefore, the discussion of transducer performance in this article encompasses all factors that may affect the guided waves in the signal generation and reception process.
Figure 7(a) presents pulse-echo signals from four individual transducers when each transducer was individually excited. The pulse-echo signal before the first T(0,1) pipe end reflection consists primarily of circumferential waves, specifically the quasi-A0 and quasi-S0 modes. Here, the circumferential wave modes are termed quasi-S0 and quasi-A0 to distinguish them from the wave modes in a plate. The variations in the wavepackets, as illustrated in the zoomed-in Figure 7(a), directly correspond to the variations in the response from an individual transducer. Quantitative analysis of amplitude and phase variations across 40 transducer channels at three distinct frequencies is depicted in Figure 7(b) and (c), respectively. Amplitude and phase exhibit nonuniformity across transducer channels, while phase variations also demonstrate a dependency on frequency particularly due to the dispersion of quasi-A0 and quasi-S0 modes. These variations in transducer performance disrupt the destructive interference of circumferential waves, resulting in residual signals that manifest as coherent noise following the summation process for T(0,1) signal extraction.
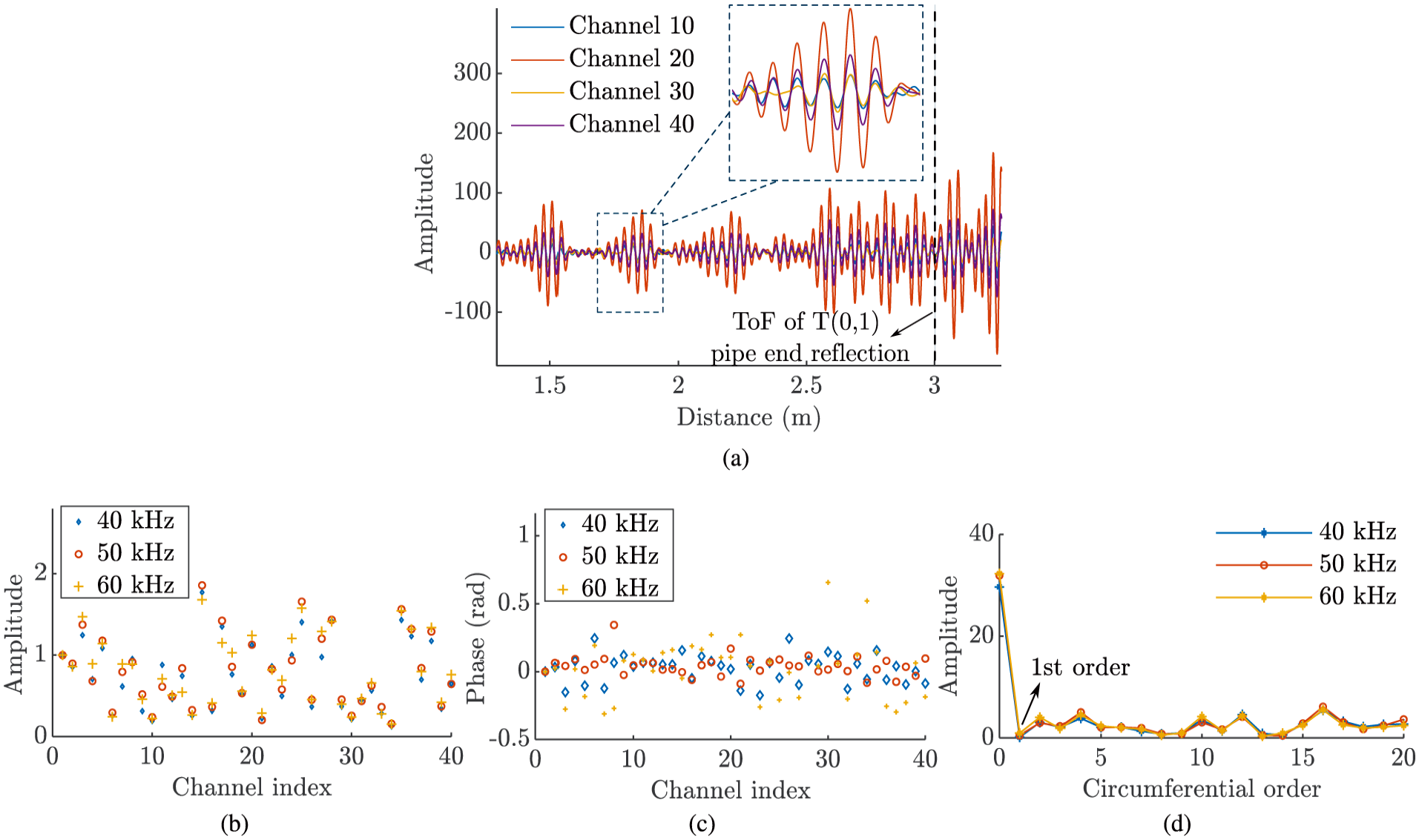
(a) Pulse-echo signals from four individual transducers when each transducer was individually excited, and quantitative analysis of (b) amplitude and (c) phase variations across 40 transducer channels at three distinct frequencies. (d) Spatial Fourier transforms for analyzing the excitation of guided wave modes with different circumferential orders using transducers with performance variations.
A spatial Fourier transform along the circumferential direction of the pipe was performed to analyze the excitation of the guided wave modes using transducers with the performance variations shown in Figure 7(b). The amplitude spectrum of the spatial Fourier transform reflects the potential of exciting an axial guided wave mode with different circumferential orders, denoted as F(n,m), where n represents the circumferential order, and m represents the counter index of a flexural wave. Figure 7(d) displays the amplitude spectrum at three frequencies. The low amplitude of order 1 suggests that the F(1,m) mode is not excited with the transducer performance imbalance depicted in Figure 7(b).
The contribution of circumferential waves and axial flexural waves to coherent noise is analyzed here. Figure 8(a) shows a simulation of the wavefield generated by a single-point source, consisting of waves propagating in the circumferential direction and axial direction. The contribution of circumferential waves and axial flexural waves can be identified by comparing the amplitude map of signals from all receivers in simulations with different boundary conditions. In the simulation, 40 transducers were located at one end of the pipe, serving as transmitters as well as receivers. Figure 8(b) illustrates the amplitude map of signals from all 40 receivers excited by transducer No. 1 with an absorbing boundary applied in the simulation, as shown in Figure 8(a). The excitation was simulated by a point source with a shear force applied to the pipe surface in the circumferential direction. In this case, the signals received by receivers consist only of circumferential waves, observed as the quasi-S0 mode and the slower quasi-A0 mode with higher amplitude propagating circumferentially. In contrast, Figure 8(c) presents the amplitude map of signals from all 40 receivers excited by transducer No. 1 without an absorbing boundary. Here, axial waves reflected from the pipe end can be sensed by receivers, contributing to the flexural modes propagating axially.
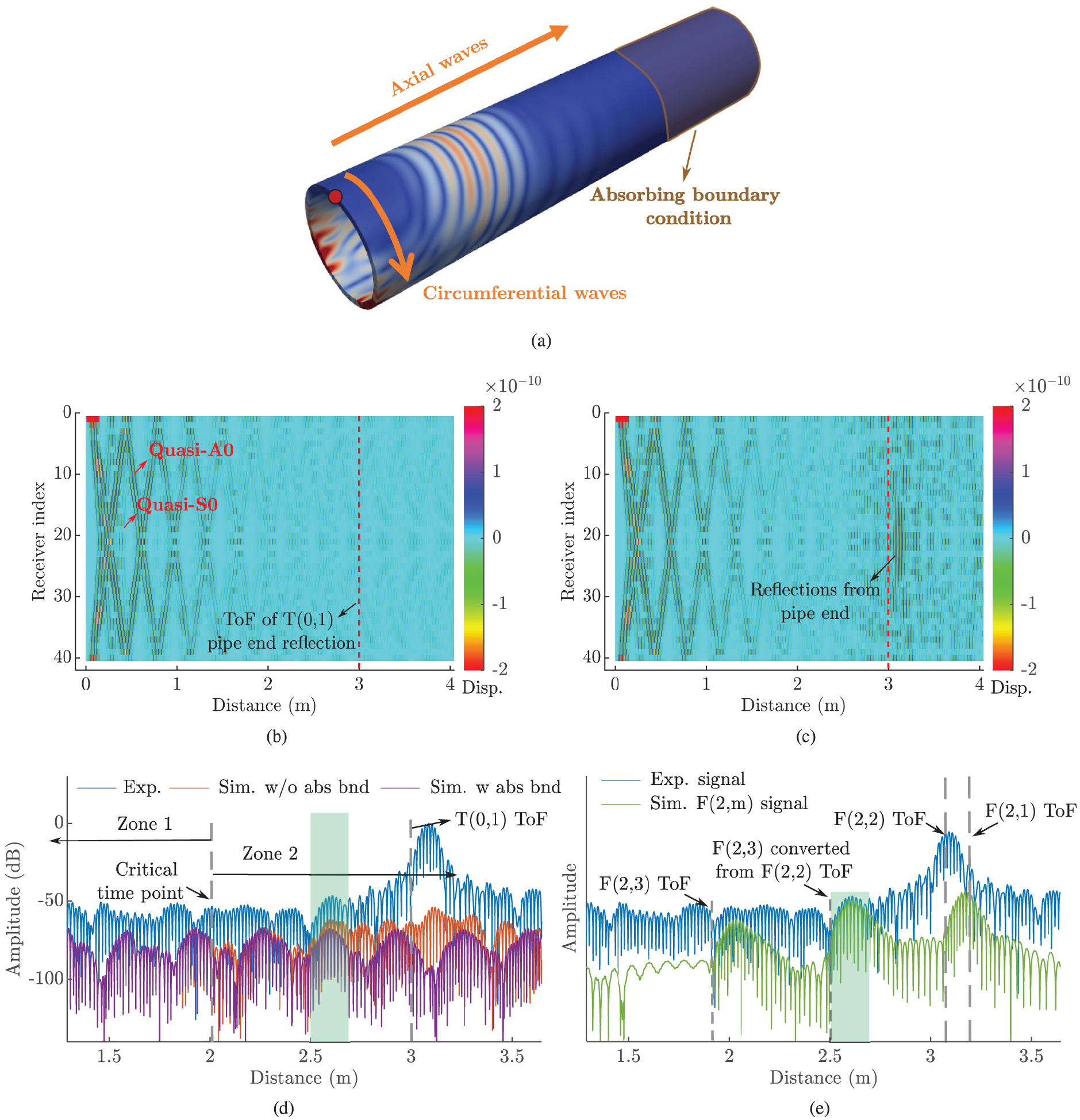
(a) Circumferential waves and axial waves propagating in a pipe with a point source excitation. (b) Simulated amplitude map of signals from all receivers when transducer No. 1 was excited, with an absorbing boundary applied in the simulation. (c) Simulated amplitude map of signals from all receivers when transducer No. 1 was excited, without absorbing boundary. (d) Comparison of the simulated time-trace signals from transducer No. 20 under two different boundary conditions with the experimental T(0,1) signal with coherent noise. (e) Comparison of the extracted F(2,m) modes with the experimental T(0,1) signal with coherent noise.
To reveal the contribution of circumferential waves and axial flexural waves to coherent noise, the simulated time-trace signals from transducer No. 20 under two different boundary conditions are compared with the experimental T(0,1) signal in Figure 8(d) on a logarithmic scale. Figure 8(d) shows two distinct zones separated by a critical time point, where only circumferential waves are present in zone 1, and both circumferential and axial waves are present in zone 2. The amplitude of circumferential waves diminishes inversely as the square root of the distance from the point source location due to the geometrical spreading in what is effectively a two-dimensional space. Therefore, the contribution of circumferential waves to coherent noise decreases with the wave propagation distance due to the energy spread.
In zone 2, a coherent wavepacket is visible in the coherent noise (marked by a green area), which is contributed to by both circumferential waves and axial flexural waves. The mode of the contributing axial flexural wave can be identified by comparing the ToF of each mode with the experimental signal. In the experiments, shear force was applied to the pipe circumference, mainly resulting in the excitation of shear displacement-dominated wave modes, such as F(1,2), F(2,2) and F(3,2), as shown in Figure 3. As mentioned before, there is no F(1,m) mode present when transducer performance follows the variations shown in Figure 7(b). Additionally, the energy of higher flexural modes like F(3,m) is relatively small compared to the lower-order modes. 39 Thus, only F(2,m) was considered and compared with the experimental T(0,1) signal to identify the wave modes contributing to the coherent wavepacket marked in zone 2.
For the calculation of the ToFs of each wave mode, considering mode conversion on the pipe end, three-dimensional FE simulations were employed based on Pipe 2. For the excitation and extraction of a specific flexural mode F(n,m), a phase shift corresponding to the circumferential order n was applied to each node for both excitation and reception before summing the signals. 2 Figure 8(e) illustrates the comparison of extracted F(2,m) modes with the experimental T(0,1) signal on a logarithmic scale. A high similarity in the ToF between the F(2,3) wavepacket, converted from the F(2,2) mode, and the marked wavepacket was observed. It means this coherent wavepacket is likely produced by circumferential waves and the F(2,3) mode converted from F(2,2) on the pipe end. It is worth noting that the amplitude of the F(2,m) mode in Figure 8(e) is depicted on an arbitrary scale, and the quantitative amplitude of a flexural mode depends on specific installation conditions. The qualitative analysis of this falls beyond the scope of this study.
Methodology
Generic scheme
In this section, we introduce a numerical framework developed for generating synthetic realistic guided wave signals, which relies on a single representative experiment. The schematic diagram of the proposed methodology is illustrated in Figure 9. To faithfully represent experimental signals, our framework incorporates both coherent noise and random noise into the simulation.
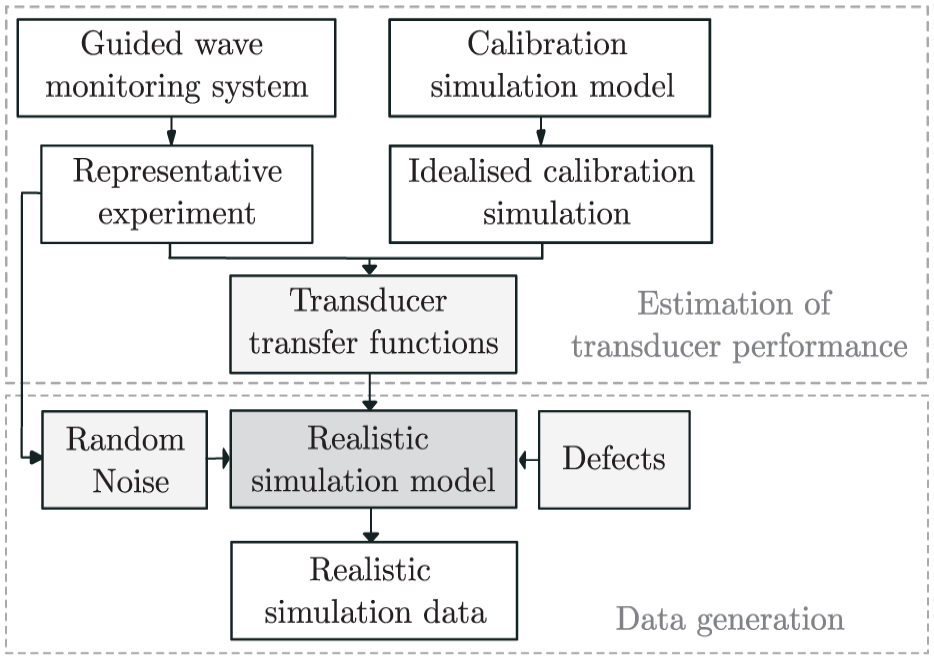
Schematic of the proposed framework for generating realistic guided wave signals through FE simulation.
In the proposed framework, simulations are conducted in two key phases: the idealized calibration simulation and the realistic simulation. In the idealized calibration simulation, all transducers are assumed to have uniform performance. A CSM dataset is obtained by applying the identical excitation signals to all transmitter nodes and the T(0,1) signal is obtained by summing the CMS signals from the reception side. In the realistic simulation model, both coherent noise and random noise are incorporated to generate realistic guided wave signals. For coherent noise consideration, transducer transfer functions are estimated and applied in the simulation on both the excitation and reception sides. Subsequently, random noise is added to the signals from each transducer channel. A realistic T(0,1) signal can be obtained by summing the signals from all transducer channels.
The incorporation of random noise involves a statistical analysis of the noise collected in the representative experiments, which is specific to the ambient environments and measurement system employed. In this study, random noise can be effectively modeled using Gaussian white noise with a limited bandwidth, as described in “Random noise” section. The RMS level of the random noise across transducer channels follows the distribution described in Figure 6(a).
To model coherent noise, transducer transfer functions are estimated based on a comparison between the representative experimental signal and the idealized calibration simulation signal in the frequency domain. The transducer transfer function obtained in this manner has shown good agreement with the transfer function obtained by characterizing all electrical and electro-mechanical components within the measurement system in the literature.40,41 The implementation of these transfer functions enables the capture of the transducer performance across the entire frequency range of interest, which is necessary for the representation of coherent noise, as discussed in “Coherent noise” section. This section will illustrate the methodology for estimating the transducer transfer functions in detail.
Without considering the effect of transducer performance, the signal emitted from transducer

where

where

where

In Equation (6),
When data are captured with the CSM arrangement, Equation (6) can be alternatively expressed as

where

The plane wave formed by the common source excitation is assumed to be minimally affected by the performance imbalance of transducers on the excitation side due to wave superposition. The plane wave consists of both T(0,1) and other unwanted flexural modes resulting from the imbalance of transducer performance. For cases where the functional transducer ring is properly installed under the guided wave monitoring guidelines, the amplitude of the unwanted flexural modes mixed in the T(0,1) wavepacket used for the estimation of a transducer transfer function is negligible compared to the amplitude of the T(0,1) wavepacket, due to the limited transducer performance variations and the mode conversion that occurs at pipe feature locations. It allows for the assumption that variations on the excitation side can be omitted, resulting in

Hence, the one-side transfer function of transducer

when the random noise
Therefore, the transducer transfer functions can be estimated by Equation (10) based on the comparison of the idealized calibration simulation signal and the representative experimental signal. It is important to note that the direct division in these equations is unstable due to the inherent presence of random noise. To address this, a Wiener filter can be implemented to stabilize the estimation of transducer transfer functions. 42 Equation (10) can be reformulated as follows:

where * denotes the complex conjugate and

Here, the parameter
Simulation setup
All simulations in this study were performed using Pogo, an FE solver developed at Imperial College London. 44 Three-dimensional FE models were constructed based on the specific pipes employed in the experiments, as detailed in Table 1. In the simulation, the transducer ring was positioned at the end of the pipe, with 40 equally spaced nodes representing 40 transducer elements for guided wave excitation and reception.
Aligned with the experimental setup, a 5-cycle Hann-windowed toneburst with a central frequency of 50 kHz was used as the excitation signal in the simulation, characterized by a T(0,1) wavelength of approximately 60 mm. To ensure a precise simulation of wave propagation, a structured mesh with an element size of 1 mm, comprising roughly 60 elements per wavelength, was implemented, with a corresponding time step of approximately
Simulation validation
To validate the methodology proposed in this article for the estimation of transducer transfer functions, we generated a set of reference simulation signals with coherent noise based on Pipe 1, using the same excitation configuration as in the experiment. These signals were then stored for comparison as the ground truth, serving as the experimental data within the framework illustrated in Figure 9. The process described in “Generic scheme” section was applied to estimate transducer transfer functions. Notably, random noise was excluded in this section, with specific emphasis placed on coherent noise.
For the generation of reference simulation signals, different phase shifts, amplitude variations, and varying passbands were applied to both the excitation and reception sides, as depicted in Figure 10(a) to (c). The resulting reference T(0,1) signal is presented in Figure 10(d) with coherent noise present.
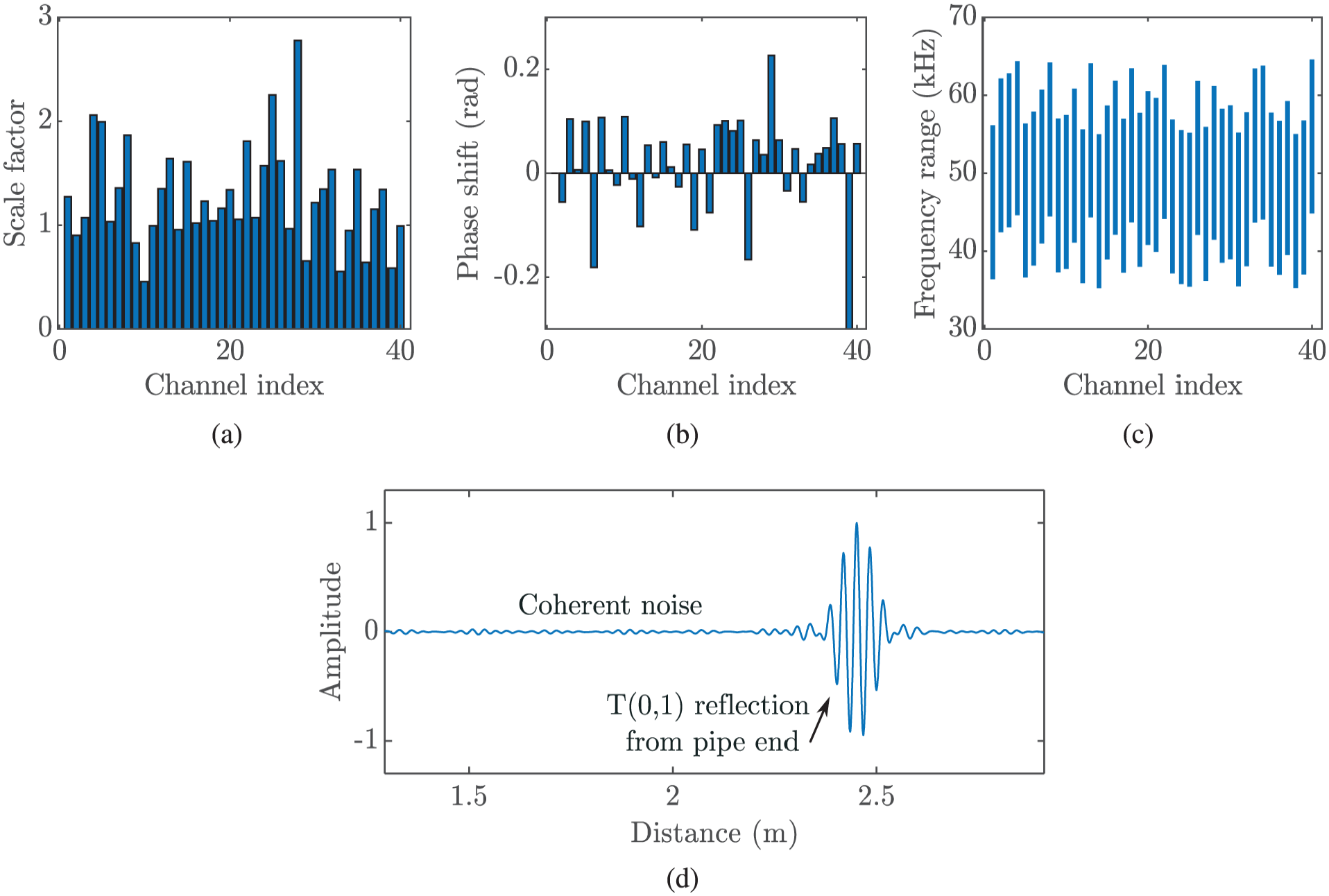
Distribution of (a) phase shifts, (b) amplitude variations, and (c) bandwidths across transducer channels applied in the reference simulation. (d) T(0,1) signal with coherent noise generated in the reference simulation.
The one-side transfer function of transducer
Reference signal
The simulation-generated T(0,1) signal with coherent noise is compared with the reference T(0,1) signal in Figure 12(a). The simulation-generated T(0,1) signal shows a similar coherent noise level as that in the reference T(0,1) signal but with some discrepancies in the waveform. Furthermore, Figure 12(b) shows the simulation-generated pitch-catch signal emitted from transducer No. 1 and received by transducer No. 35, which is overestimated compared to the corresponding reference signal
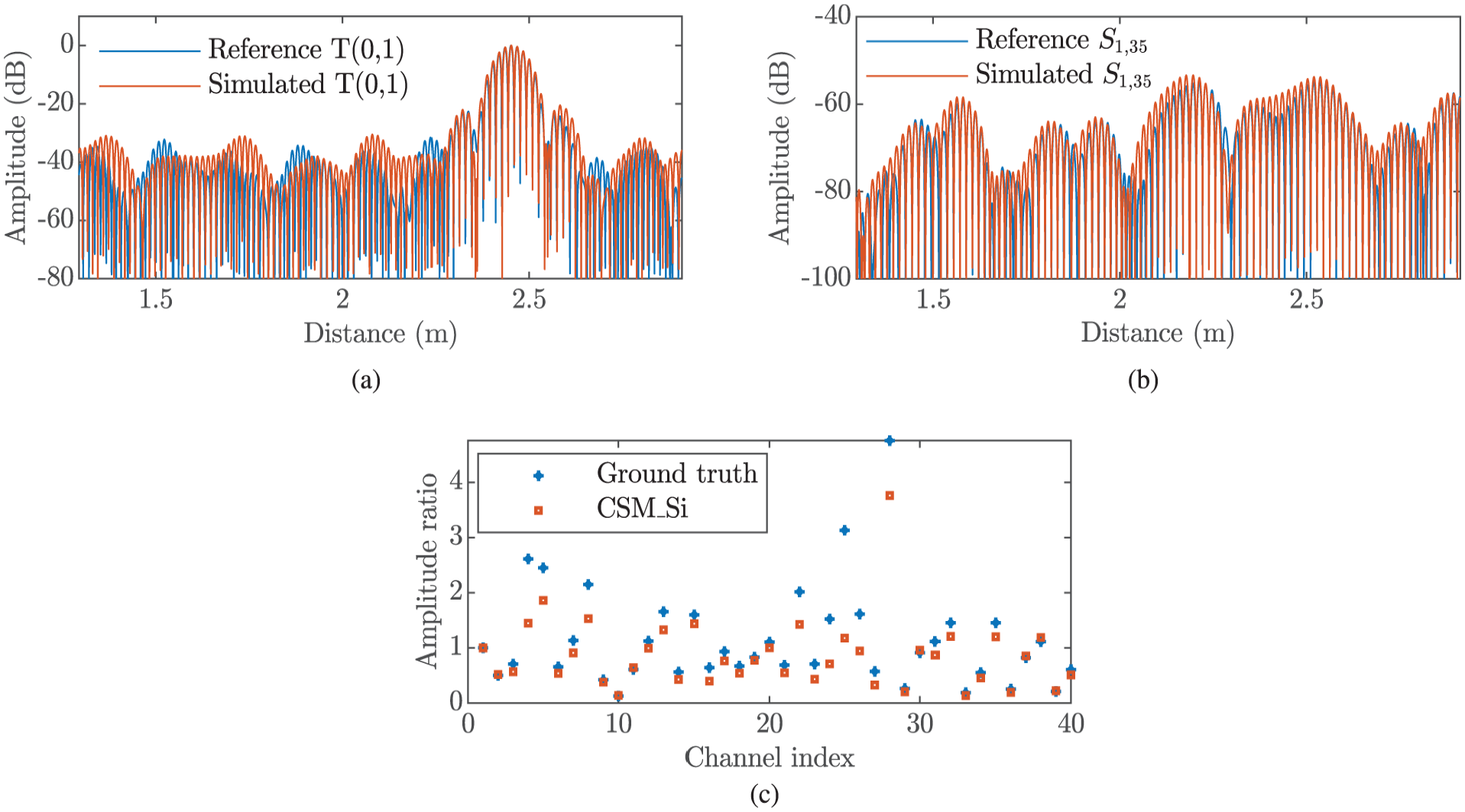
(a) Comparison of the simulation-generated T(0,1) signal with the T(0,1) reference signal on the logarithmic scale. (b) Comparisons between the simulation-generated pitch-catch signal emitted from transducer No. 1 and received by transducer No. 35, with the corresponding reference signal
Figure 12(c) compares the estimated amplitude variations with the ground truth of amplitude variations applied in the reference simulation. The estimation generally shows good agreement with the ground truth but exhibits a larger deviation when the variations in transducer response become too large, thereby violating the assumption in Equation (9).
Experimental validation
In this section, the proposed methodology is evaluated based on experimental signals collected from Pipe 2. As mentioned in “Coherent noise” section, the experimental signals were obtained with 21 averages to suppress random noise, focusing on the effects of coherent noise.
Individual T(0,1) signal comparison: Figure 13(a) displays the simulation-generated T(0,1) signal based on the estimated transducer transfer functions. The comparison with the experimental T(0,1) signal reveals a good agreement in both the coherent noise level and the waveform of the T(0,1) wavepacket reflected from the pipe end. The frequency spectrum comparison in Figure 13(b) highlights the similarity between the simulation-generated signal and the experimental T(0,1) signal, displaying an overall smooth shape with minor distortions attributed to the presence of coherent noise.
Error analysis: Similarly to the comparison in the simulation validation shown in Figure 12(a), the comparison between the simulation-generated T(0,1) signal and the experimental signals in Figure 13(a) presents a discrepancy in the coherent noise waveform. One possible reason for this discrepancy is the error in estimating transducer transfer functions. Assumptions were made about random noise and the variations in transducer responses in Equation (11) for the estimation of transducer transfer functions. These assumptions may be violated for certain transducer channels where random noise or transducer response variations are more pronounced. In the experiments, additional error sources may be present due to imperfections in the real world. For instance, variations in pipe wall thickness
45
and material anisotropy resulting from the manufacturing process
46
can contribute to these errors. The manufacturing of seamless pipes typically involves processes such as extrusion and hot finishing, which inevitably introduce changes in the material microstructure, leading to anisotropy, particularly in the axial and circumferential directions.
47
These imperfections introduce extra errors in the idealized calibration simulation signal
Statistical T(0,1) signal comparison: In this section, we conduct a statistical analysis to quantitatively evaluate the effectiveness of the proposed framework in accurately representing coherent noise. Experimental data with various transducer performance variations, hence exhibiting different coherent noise levels, were collected based on a full-matrix dataset obtained by exciting individual transmitters sequentially. Specifically, a varying number of transducer channels were randomly selected and disabled, and the corresponding signals in the full-matrix dataset related to these channels were suppressed. Generally, an increase in the number of disabled transducer channels results in a higher coherent noise level in the experimental signal. Subsequently, the modified full-matrix dataset was summed on the excitation side to acquire the CSM data, which were then used to estimate transducer transfer functions according to the method detailed in “Generic scheme” section.
Figure 14 compares the simulation-generated T(0,1) signals with the experimental T(0,1) signals, showcasing diverse coherent noise levels. The disabled transducer channels are highlighted in red in the corresponding figures on the right side. Overall, a good agreement is observed in the coherent noise level. For a quantitative evaluation, the coherent noise level of a T(0,1) signal was calculated using signal-to-noise ratio (SNR), defined as follows:

where
Figure 15 displays a scatter plot of the SNR values of the simulation-generated T(0,1) signals against those of the experimental T(0,1) signals, comprising 100 data samples. The strong linearity observed in the SNR values between these two datasets suggests that the proposed framework performs well in quantitatively representing coherent noise in T(0,1) guided wave signals. Furthermore, the large set of realistic simulation data generated by the proposed framework can be used for various applications that require such large datasets, such as the training of machine learning models for damage identification from complex guided wave signals and POD analysis.
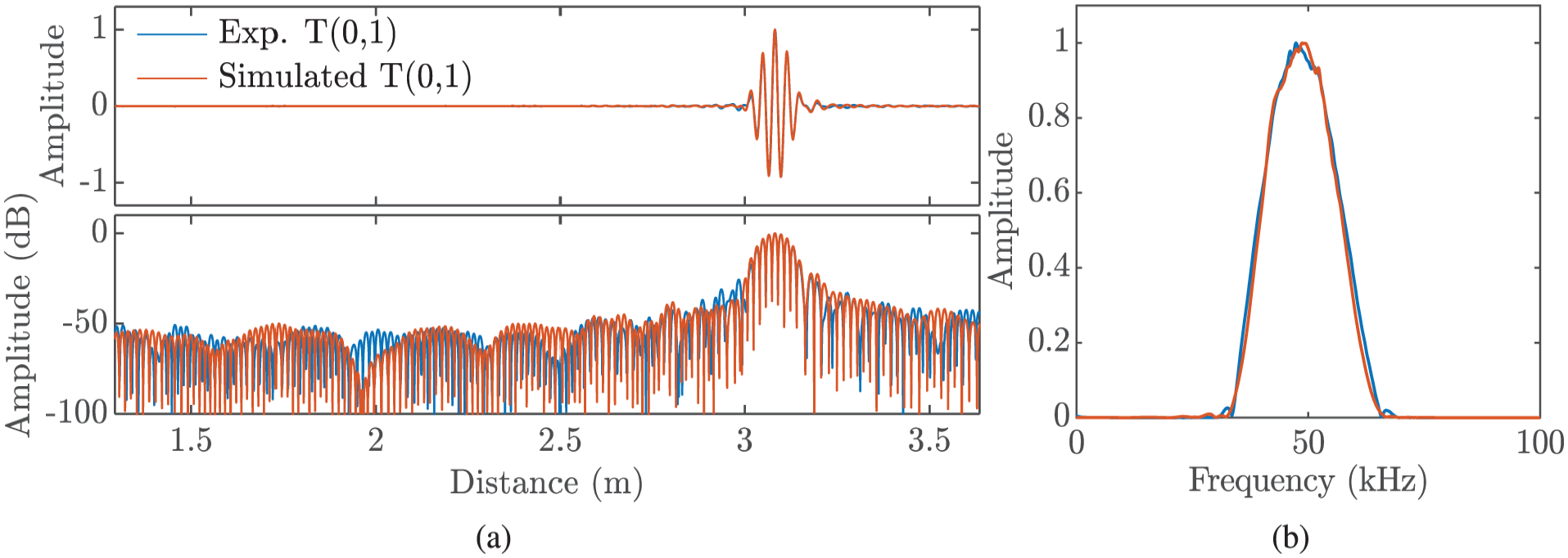
Comparison between the simulation-generated T(0,1) signals and the corresponding experimental T(0,1) signals in (a) the time domain and (b) the frequency domain.
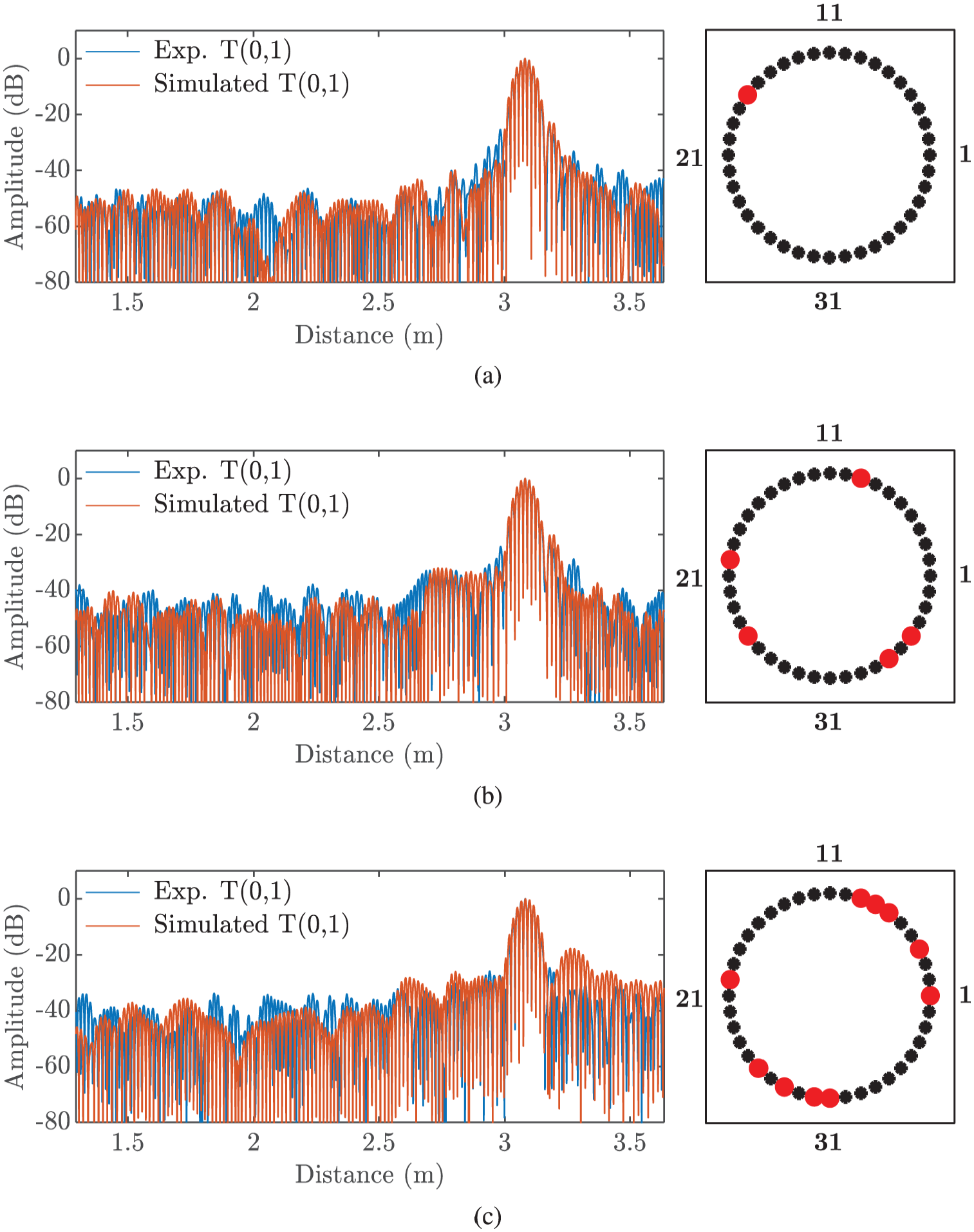
Comparison between the simulation-generated T(0,1) signals (shown in orange) with the experimental T(0,1) signals (shown in blue) with different coherent noise levels induced by the disabled transducer channels, which are highlighted in red in the corresponding figures shown on the right. (a) One transducer channel disabled. (b) Five transducer channels disabled. (c) Ten transducer channels disabled:
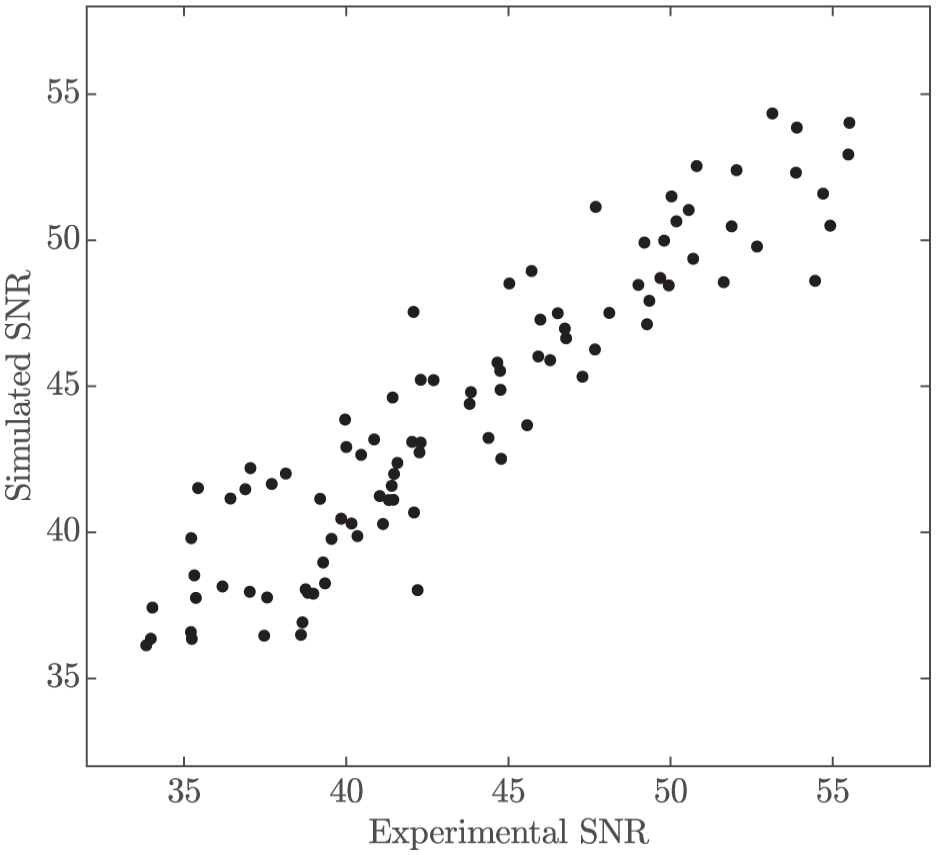
Scatter plot of the SNR values of the simulation-generated T(0,1) signals against those of the experimental T(0,1) signals, comprising 100 data samples.
In the next section, an application in the determination of the inspection range in pipe monitoring will be illustrated based on the POD analysis using the simulation-generated realistic data.
Reliability estimation
In current industrial practice, the inspection range of a guided wave system for monitoring is determined based on the system sensitivity and noise levels, as illustrated in Figure 1. Specifically, the end of the detection/inspection is set as the point where the Call DAC drops below the Detection Threshold. As discussed in “Real guided wave signals and noise” section, the DAC curve can be quantitatively established using the absolute calibration method based on known weld size parameters. 30 However, the setting of the detection threshold relies on the subjective judgment of inspectors to determine the noise level for a given inspection.
In this section, we present a quantitative estimation method for determining the inspection range of a guided wave monitoring system without human intervention, using guided wave signals generated in the proposed realistic simulation model.
POD analysis procedure
For the quantitative evaluation of the detection performance of a guided wave monitoring system at a specific location, a POD analysis was conducted using the simulation-generated guided wave signals. The methodology for the POD analysis employed in this study adheres to the guidelines outlined in MIL-HDBK-1823A 2009 (Nondestructive Evaluation System Reliability Assessment), 11 which is a universally accepted reliability assessment guideline for NDT. It provides comprehensive instructions on performing POD analysis based on signal response and hit-miss data. In this study, the POD analysis was carried out based on the signal response data.
POD curves illustrate how the detection probability varies with the defect parameter, such as flaw size, effectively quantifying the systems capability to detect defects when they are present. The POD value, represented as the blue shaded area in Figure 16, is defined as

where

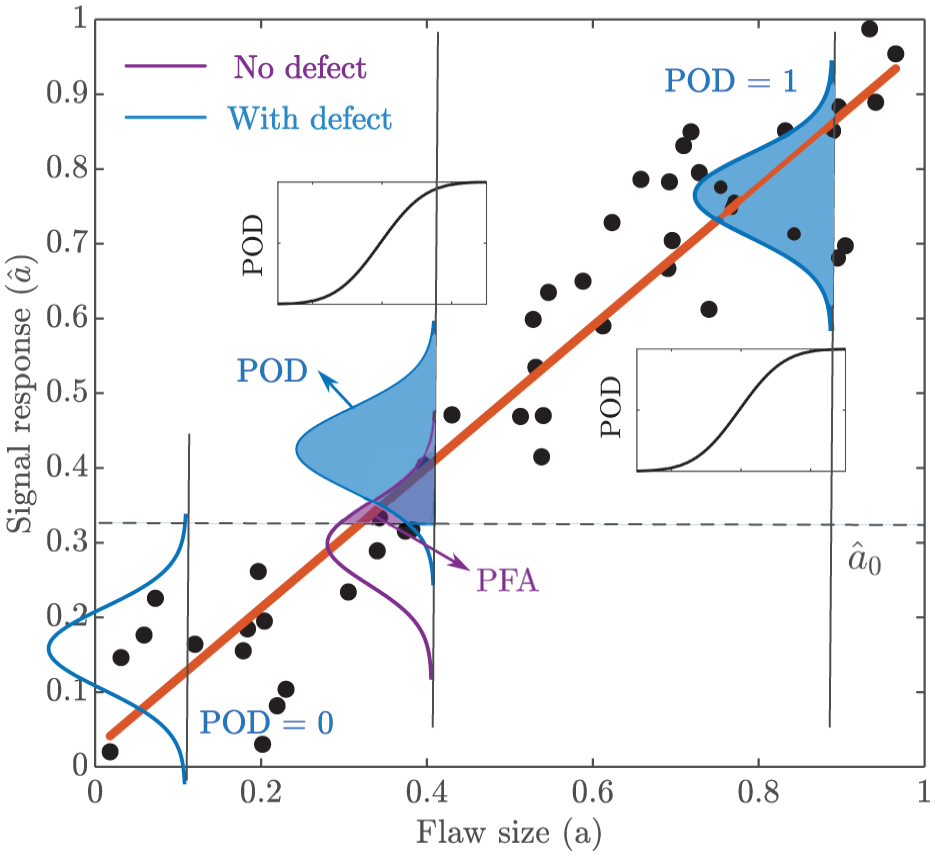
Illustration of the definition and calculation of a POD curve (adapted from figure 9 on page 28 in Gandossi and Annis 48 ).
Traditionally, the POD curve based on the signal response can be calculated using linear regression. This method assumes that the relationship between the signal response and the flaw size is linear and that any data scatter follows the same probability distribution. The parametric model can be expressed as follows:

Here,
The POD curve can be described by the cumulative density function of a normal distribution, given by

The parameters in Equation (17) are related to the parameters in Equation (16) as follows:

and

where
where
With the estimated parameters based on the collected data, a confidence bound reflecting the error due to the limited sample size can be calculated using the Wald method based on the standard deviation in the estimated parameters. 48
Generation of datasets
To demonstrate the quantitative estimation method for determining the inspection range of a guided wave monitoring system in a practical scenario, a series of guided wave signals were generated using the proposed numerical framework. This framework was based on a single set of representative experimental signals collected in the laboratory environment. It is worth mentioning that collecting representative experimental signals is necessary for the proposed framework to generate guided wave signals that represent actual measurement conditions, as illustrated in “Generic scheme” section. This is because the performance of an SHM system is highly specific to environmental and operational conditions. The procedure for collecting these signals is straightforward and incurs almost no cost in the context of SHM. For example, to estimate the inspection range of an SHM system on a pipe in the laboratory environment, representative experimental data can be collected whenever the reliability of the SHM system is under investigation. In this study, the data were collected at the beginning of the transducer installation.
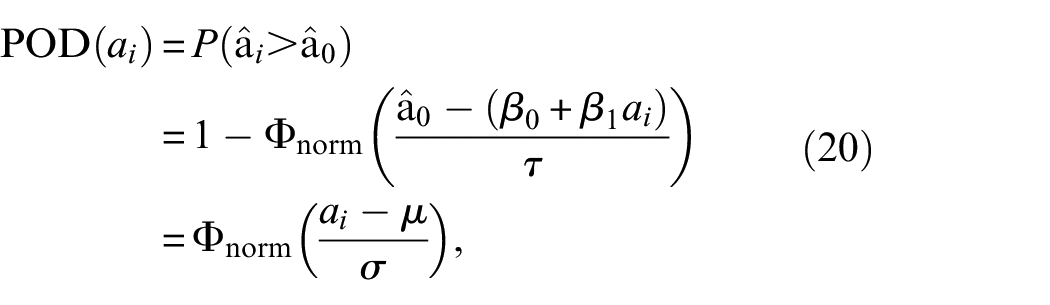
The simulation for data generation involved a 10-m 5-inch Schedule 40 steel pipe with 3 welds, designated as Pipe 3 in Table 2. To simulate the decay in amplitude caused by wave propagation, a high attenuation coefficient of 1500/s was implemented to represent a high-damping environment, such as when the pipe is buried underground. In our model, the welds were characterized by a width of 20 mm and a cap height of 3 mm, resulting in approximately 49% CSC and a reflection coefficient of about 41% in the absence of damping. It should be emphasized that the weld sizes in terms of CSC were exaggerated for illustrative purposes, exceeding practical norms. The positions of the welds are depicted in Figure 17, and defects were introduced as through-thickness defects with varying circumferential extent, reaching up to 6% CSC. An absorbing boundary condition was applied on the left side of the transducer ring, meaning only the waves reflected from the welds on the right side were analyzed.
Geometric and material information of the pipe modeled for POD analysis.
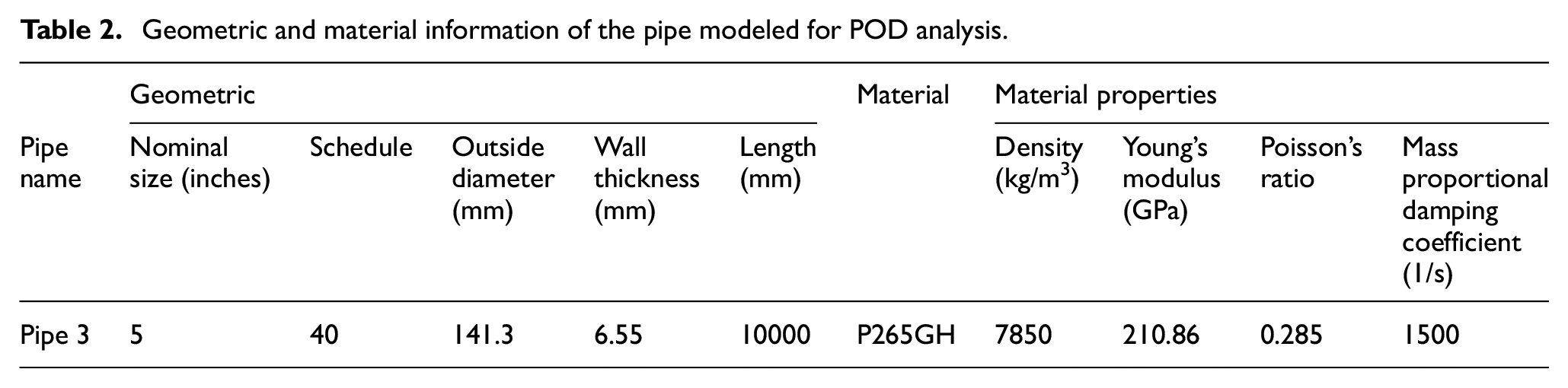
Example T(0,1) signals generated in the simulation depicted on both linear (upper figure) and logarithmic (lower figure) scales. (a) T(0,1) signal with only random noise, (b) T(0,1) signal with both coherent noise and random noise.
For the POD analysis, we generated two sets of data for comparison. One set comprised purely random noise, commonly employed in literature to include noise effects. Figure 17(a) demonstrates an example T(0,1) signal with random noise on both linear and logarithmic scales, showing a consistent noise level marked by the shaded gray area. The SNR of the random noise was approximately 65 dB, determined based on the random noise measurements in the representative experiment. The other dataset included both coherent and random noise, as shown in Figure 17(b), generated using the proposed realistic simulation model. This signal exhibits a behavior similar to the real experimental signal depicted in Figure 1. The coherent noise is proportional to the signal amplitude and decreases with wave propagation due to material damping and energy spread, whereas random noise remains constant.
As mentioned earlier, the inspection range is typically determined by the point where the Call DAC drops below the detection threshold, following current industrial practice. In Figure 17, the noise area was subjectively marked based on intuitive noise levels, with the detection threshold set at 6 dB above the noise level. Consequently, in both cases depicted in Figure 17, the estimated inspection range is approximately 6.6 m. The estimation of the inspection range for these two cases, in Figure 17(a) and (b), shows similarity, as the intersection points fall within the range dominated by random noise, which exhibits similar levels for both cases. However, this method of determining inspection ranges presents two issues: first, the detection threshold is established based on subjective judgment of noise levels by the operator, and second, there lacks a quantified measure of confidence within the inspection range, which is not guaranteed to be 100%. Hence, a more objective, automatic, and quantitative estimation procedure will be presented in this section based on POD analysis.
In practical guided wave monitoring, a near-field zone, as shown in Figure 1, exists on either side of the transducer ring, characterized by artificially reduced amplitudes unsuitable for defect quantification. 29 In the simulation, this region was set at 0.8 m away from the transducer ring for illustrative purposes, as indicated in gray on the left side of Figure 17(a) and (b). Consequently, the estimation area was defined as 1.5–7.4 m for sampling defect locations, and POD curves were computed along the pipe axis at intervals of 60 mm, approximately 1 wavelength of the T(0,1) wave. A total of 100 locations along the pipe axis were considered to calculate the POD curves for estimating the inspection range.
To quantify the defect response, DAC curves were determined based on the weld reflections, as shown in Figure 17. In this study, we used the Flange DAC curve to quantify the reflection from a defect in terms of CSC. As indicated in Equation (20), another key factor that determines the calculation of POD and PFA values is the detection threshold,
Generation of POD curves
Figure 18(a) and (b) illustrate the linear regression relationship between the signal response and flaw size in terms of CSC when the defect is positioned at a distance of 3.54 m from the transducer ring. Figure 18(a) is based on the dataset with only random noise, whereas Figure 18(b) is based on the dataset with both coherent noise and random noise. At the chosen location, coherent noise dominates in Figure 18(b). The estimates of
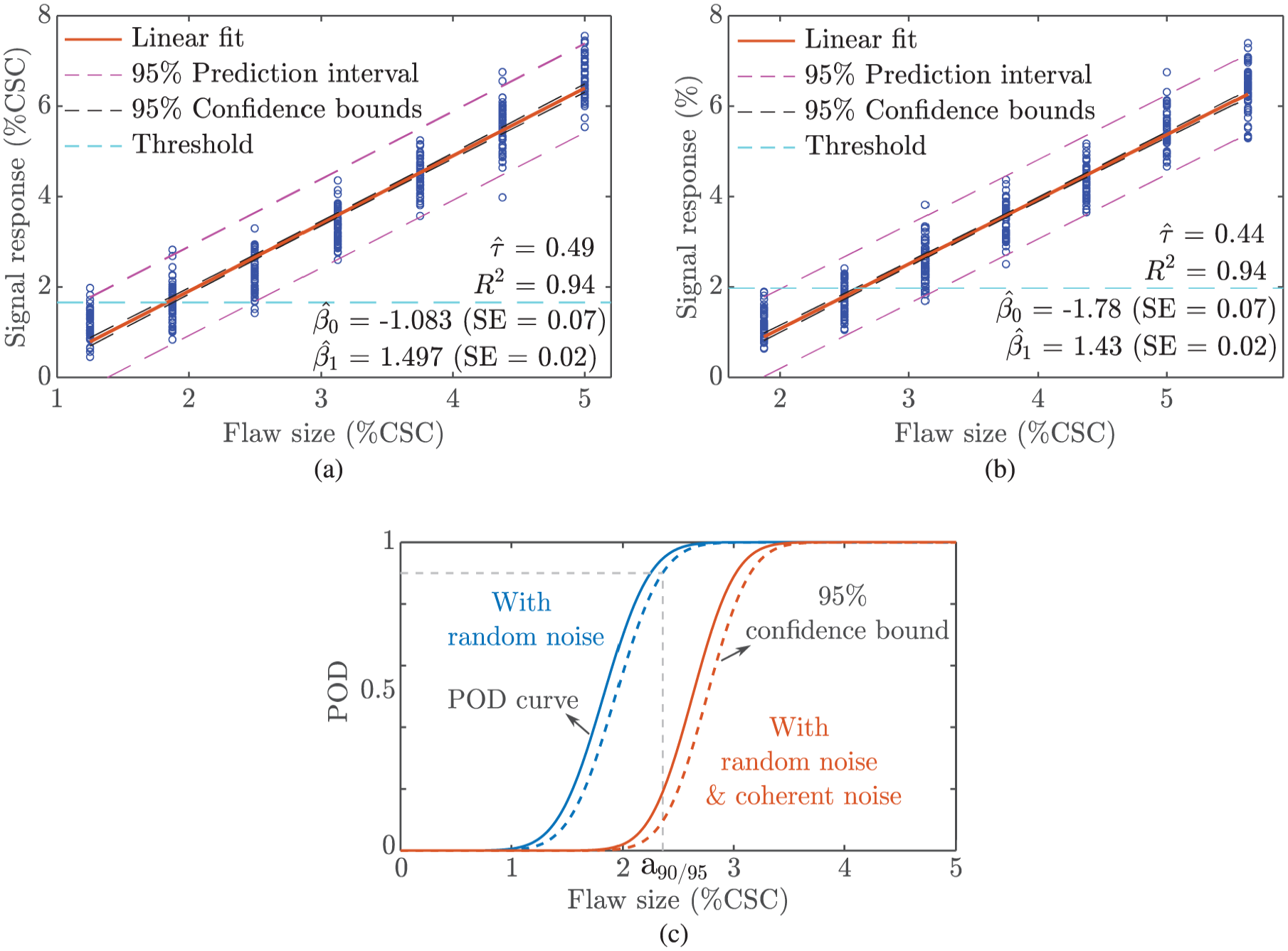
Linear regression relationship between the signal response and flaw size in terms of CSC and the corresponding POD curves when the defect is positioned at a distance of 3.54 m from the transducer ring. (a) Linear regression of the data with only random noise, (b) linear regression of the data with both coherent noise and random noise, (c) comparison of the POD curves calculated based on two distinct datasets.
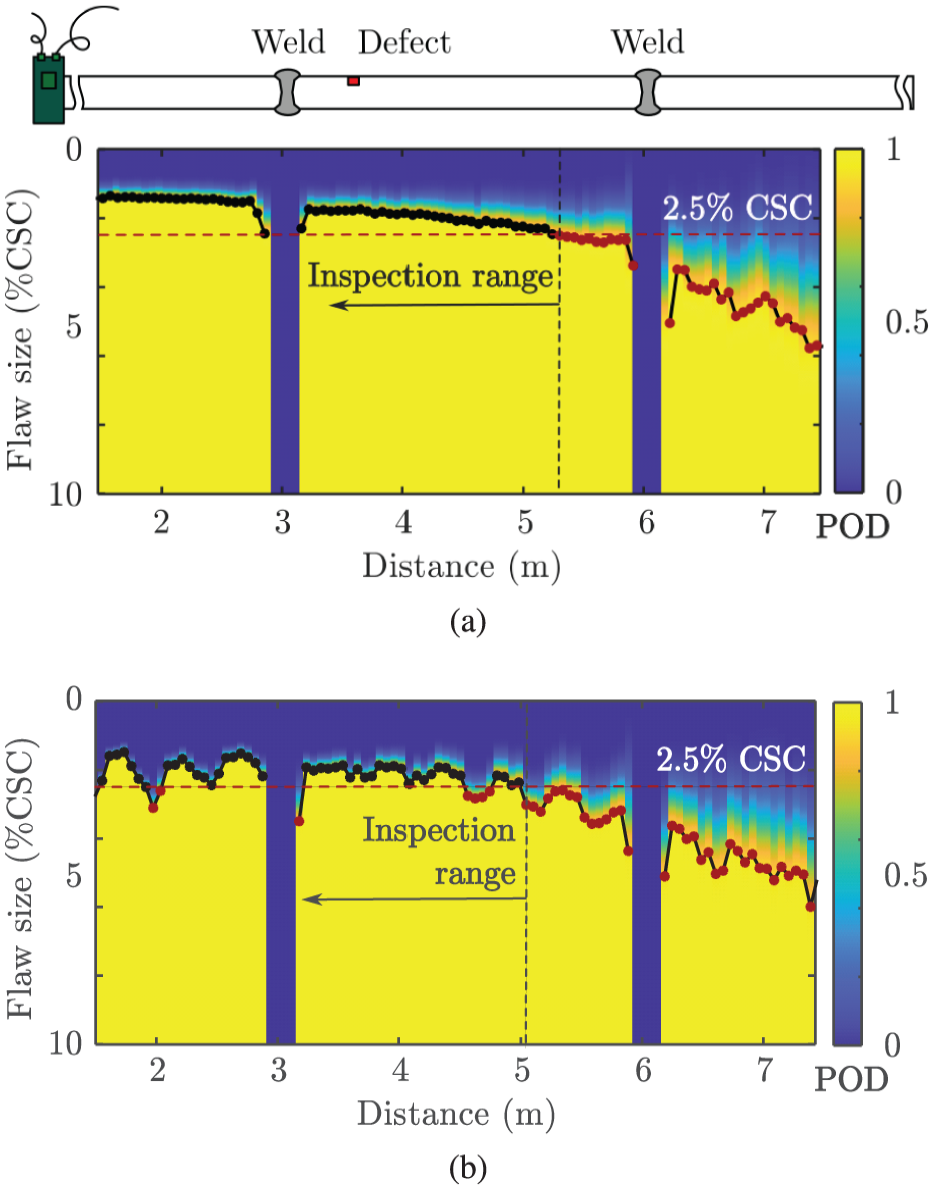
POD maps calculated from two distinct datasets for the quantification of the inspection range. (a) POD map calculated based on the data with only random noise, (b) POD map calculated based on the data with both coherent noise and random noise. The POD map was created by calculating the POD curve at different distances from the transducer ring. The plotted line with dot markers represents the
The POD curves and their corresponding 95% confidence intervals, calculated from two distinct datasets, are compared in Figure 18(c). It is evident that the POD curve, when including coherent noise, shifts to the right of the curve derived from data considering only random noise. This shift implies that, for the same-sized defect, a lower POD value is expected when the influence of coherent noise is considered. In POD analysis, the
Estimation of monitoring range
For the quantitative estimation of the inspection range of a guided wave system for pipe monitoring, POD maps along the pipe axis were generated based on two distinct datasets. Figure 19(a) presents the POD map calculated based on the data with only random noise, where the horizontal axis corresponds to the distance of the defect away from the transducer ring, the vertical axis corresponds to the flaw sizes, and the color-coded map displays the corresponding POD values. Figure 19(b) presents the POD map calculated based on the data with both coherent noise and random noise. In both figures, the
In Figure 19(a), the
In Figure 19(b), the effect of coherent noise is included. The
For determining the inspection range with a specific sensitivity requirement, for example, 2.5% CSC as marked in Figure 19, a threshold line can be drawn, and the furthest distance at which the
In comparison with the current industry practice for determining the inspection range, which stands at about 6.6 m for both cases based on the intersection between the Call DAC and the detection threshold as depicted in Figure 17, the method proposed in this study based on the POD map calculated using the simulation-generated realistic guided wave signals provides a more detailed quantitative estimation of the system’s detection capabilities within the inspection range.
The validation of the results for generating POD curves and estimating the monitoring range based on the POD analysis is ensured by the validation of the generated guided wave signals. These signals have been verified by both comparing individual guided wave signals with experimental signals and performing statistical analysis in ‘Experimental validation’ section. In a standard POD analysis, the output is entirely determined by the signals used to calculate the signal response. Therefore, the faithful representation of experimental signals by simulation-generated guided wave signals eliminates the need to perform a full set of experiments with artificial defects.
It is worth noting that although the proposed numerical framework was demonstrated using a pipe structure with nondispersive T(0,1) wave modes, it is equally capable of generating realistic Lamb-type guided wave signals in plate-like structures. The sources of coherent and random noise in Lamb-type guided wave signals are similar to those in T(0,1) guided waves. Specifically, random noise, originating from electrical interference or environmental vibrations, is independent of the structure type and can be directly modeled using the proposed method. Coherent noise arises from mode conversions, reverberations, Lamb wave dispersion, and wavepacket distortion due to the transducers electro-mechanical coupling effect. The first three sources are fundamental wave propagation phenomena and can be accurately modeled in FE simulations, while the third is specifically addressed by the proposed framework.
Conclusion
In this article, we propose a numerical framework for generating realistic guided wave signals for the purpose of reliability estimation. Through a comprehensive analysis of experimental signals, we investigate the characteristics and composition of noise, including coherent and random noise. We find that random noise can be effectively modeled as band-limited Gaussian white noise. Moreover, we demonstrate that coherent noise can be modeled based on the transducer transfer functions, derived from a comparison between the representative experimental signals and the idealized calibration simulation signals. Through both visual observation and statistical analysis, we demonstrate that the proposed framework successfully generates realistic guided wave signals that accurately represent the noise characteristics found in actual guided wave signals.
An application of the realistic simulation-generated signals was then illustrated. The reliability of the guided wave system for pipe monitoring used in this study was assessed in terms of the inspection range via POD analysis. A comparison of the POD curves generated using datasets containing only random noise and those with both coherent and random noise highlights the crucial importance of considering coherent noise for more accurate reliability estimation in the range where coherent noise is dominating. Additionally, compared to the current industry practice for inspection range determination, the POD analysis using realistic simulation-generated data offers more detailed quantitative insights.
The numerical framework proposed in this study provides, for the first time, an efficient method for generating realistic guided wave signals tailored for practical applications. This framework facilitates the performance evaluation of a guided wave monitoring system under diverse and realistic conditions within the SHM context, offering enhanced flexibility and feasibility. While the proposed numerical framework was illustrated based on the generation of realistic guided wave signals for pipe monitoring, it can be applied to general ultrasonic testing scenarios and other applications where the measurement uncertainty needs to be faithfully represented in the simulation. For example, realistic bulk wave signals can be generated for phased array ultrasonic testing applications by incorporating representations of both random and coherent noise originating from the measurement system. Additionally, realistic Lamb-type guided wave signals in plate-like structures can be generated using the proposed framework, given that the sources of coherent and random noise in Lamb-type guided wave signals are similar to those in the T(0,1) guided waves propagating in a pipe. The proposed framework is also capable of handling environmental conditions, such as temperature variations, by considering changes in transducer performance, random noise characteristics, and the material properties of the structure under inspection. Furthermore, our framework exhibits potential as a versatile tool for generating realistic simulation data with broader applications, including training machine learning models. This capability addresses challenges related to data scarcity in the NDT and SHM communities.
Footnotes
Acknowledgements
The authors would like to thank Dr. Thomas Vogt and Dr. Stefano Mariani for the valuable discussions with them, thank Prof. Peter Cawley, Prof. Michael Lowe, and Prof. Constantinos Soutis for manuscript reviewing, and thank Antonio De Sanctis for his help with the experimental work in this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by GW4SHM, EU Horizon 2020 H2020-MSCA-ITN-2019, Grant No. 860104.