
Abstract
Impact force identification is of great importance for composite structural health monitoring due to the poor impact resistance of composite materials. Convex sparse regularization method based on L1-norm tends to underestimate the amplitude of the impact force. This paper proposes a novel method using fully overlapping group sparsity based on Lp-norm regularization (FOGSLp) for impact force identification, which can localize the impact force and reconstruct its time history simultaneously with limited measurements in under-determined cases. The FOGSLp method takes more sparse prior information into account by combining the non-convex Lp-norm (
Keywords
Introduction
Composite materials are widely used in aerospace field to reduce aircraft weight and improve strength. In the practical operation environment, an aircraft composite structure may be subjected to impact forces on the ground and during takeoff. Typical sources of impact include hail, bird strikes, tool drops, runway debris, and ground service equipment.1,2 However, the impact resistance of composite materials is poor, 3 which may result in barely visible impact damage such as delamination and fiber breakage inside composite materials,4,5 severely reducing the strength and loading-bearing capacity of composite structures. Therefore, it is of great significance for safe service of aircraft to monitor impact forces acting on composite structures, 6 but the impact forces are difficult to be measured directly in practice. In recent years, impact force identification methods have been extensively studied, which localize and reconstruct impact forces based on structural properties like frequency response function (FRF) and measured response.
The problem of impact force identification is typically an ill-conditioned inverse problem, which means that minor errors in response measurements can cause the results of force identification to deviate significantly from the accurate ones. Therefore, various regularization methods are developed to solve the force identification problem. 7 For force identification problems with known positions, traditional regularization methods such as Tikhonov regularization are mainly used to reconstruct the time history of the force. Wang et al. 8 proposed a sinc-dictionaries-based Tikhonov regularization approach that circumvented the ill-conditions of force identification, which substantially improved the computation efficiency compared with the traditional Tikhonov regularization method. Kalhori et al. 9 used the Tikhonov regularization method to solve the inverse problem of impact force identification in the under-determined case, and results indicated that the Tikhonov regularization method performed poorly in solving the under-determined problem, and failed to localize the impact force.
In order to reconstruct the time history of the impact force more accurately, sparse regularization methods based on L1-norm have gained more attention in the field of impact force identification. Such methods utilize the sparsity of the impact force in the time domain as prior information and enhance the stability and accuracy of the solution of the ill-posed inverse problem. In the framework of L1-norm sparse regularization, Ginsberg et al. 10 used three parameters, including the pulse width, pulse magnitude value, and pulse magnitude arrival time, to construct a sparse representation dictionary of impact forces, and an impact force sparse identification method based on basic pursuit denoising was proposed. Huang et al. 11 employed cubic B-spline scaling functions and the TWIST algorithm as pre-processing and post-processing, respectively, to improve impact force identification accuracy with higher computational efficiency. Although the standard sparse regularization method based on the L1-norm is an easy-to-solve convex optimization problem and improves the accuracy significantly compared with traditional regularization methods like Tikhonov regularization, the problem of insufficient sparsity-promoting ability remains to be solved, as it often results in underestimation of the amplitude of impact forces. 12
It is noted that the abovementioned studies only focused on the reconstruction of impact force time history, but the localization of impact force is also a critical part of impact force identification. 13 Ciampa et al. 14 localized the impact sources on composite structures with unknown layup and cross section based on the differences of the stress waves, but the reconstruction of impact force time history was not considered. Li et al. 15 proposed a deep metric learning method for impact force localization, and the weighted fusion Tikhonov regularized total least squares method was used for impact force reconstruction. Qiu et al. 16 localized impact forces on a steel panel by using the pattern recognition method and reconstructed the time history of impact force via the Tikhonov regularization method, which are two separate processes. Chen et al. 17 used two different deep neural networks for localization and time history reconstruction of the impact force separately, while a large amount of data was required to train the networks.
In practical engineering, it makes more sense to achieve accurate localization and time history reconstruction simultaneously for impact forces at unknown locations. For the purpose of taking full advantage of the sparsity of impact force, some non-convex regularizers have been taken into account. Aucejo and De Smet 18 proposed a multiplicative regularization for force reconstruction and localization, which was able to adjust the parameter p in Lp-norm. Qiao et al. 12 developed a non-convex optimization model for the under-determined problem of impact force identification based on Lp-norm, using one sensor to monitor nine potential impact locations, and an iteratively reweighed L1-norm algorithm was introduced to solve the non-convex model. Moreover, considering the impact force is a continuous process over an extremely brief time, it has an inherent group sparsity. Zhang et al. 19 proposed a new method for moving force identification by combining group sparsity theory and compressed sensing, and signicantly improved the accuracy in practice. Wambacq et al. 20 achieved the localization of impact forces and reconstruction of time histories with limited measurements by taking L2,1-norm as penalty and proposed an interior point method to improve computational efficiency. From the above research, regularization methods utilizing more prior information can impose stronger constraints on the results of impact force identification, thereby improving the solution accuracy.
Inspired by the successful applications of the non-convex Lp-norm regularization and group sparsity in multiple fields,12,21–24 this paper develops a novel fully overlapping group sparsity based on non-convex Lp-norm regularization (FOGSLp) for impact force identification, aiming to localize impact force and reconstruct its time history simultaneously. Firstly, more prior information of sparsity are taken into account by combining the Lp-norm and overlapping group sparsity, which not only enhances the sparsity and improves the accuracy of reconstructed amplitude but also strengthens the ability to solve under-determined problems. Then under the majorization-minimization (MM) framework, an accelerated grouped shrinkage-thresholding algorithm (AGSTA) is proposed to solve the non-convex optimization problem. The performance and effectiveness of the proposed method are verified in simulations and experiments, respectively.
Mathematical description of impact force identification
Inverse problem of impact force identification
For a linear time-invariant system, the relationship between the impact force and the response can be defined as the following Fredholm integral equation:

where

where ⊗ is the convolution operation symbol, and τ is the time-shift factor. Equation (2) can be discretized in the time domain for numerical computation as
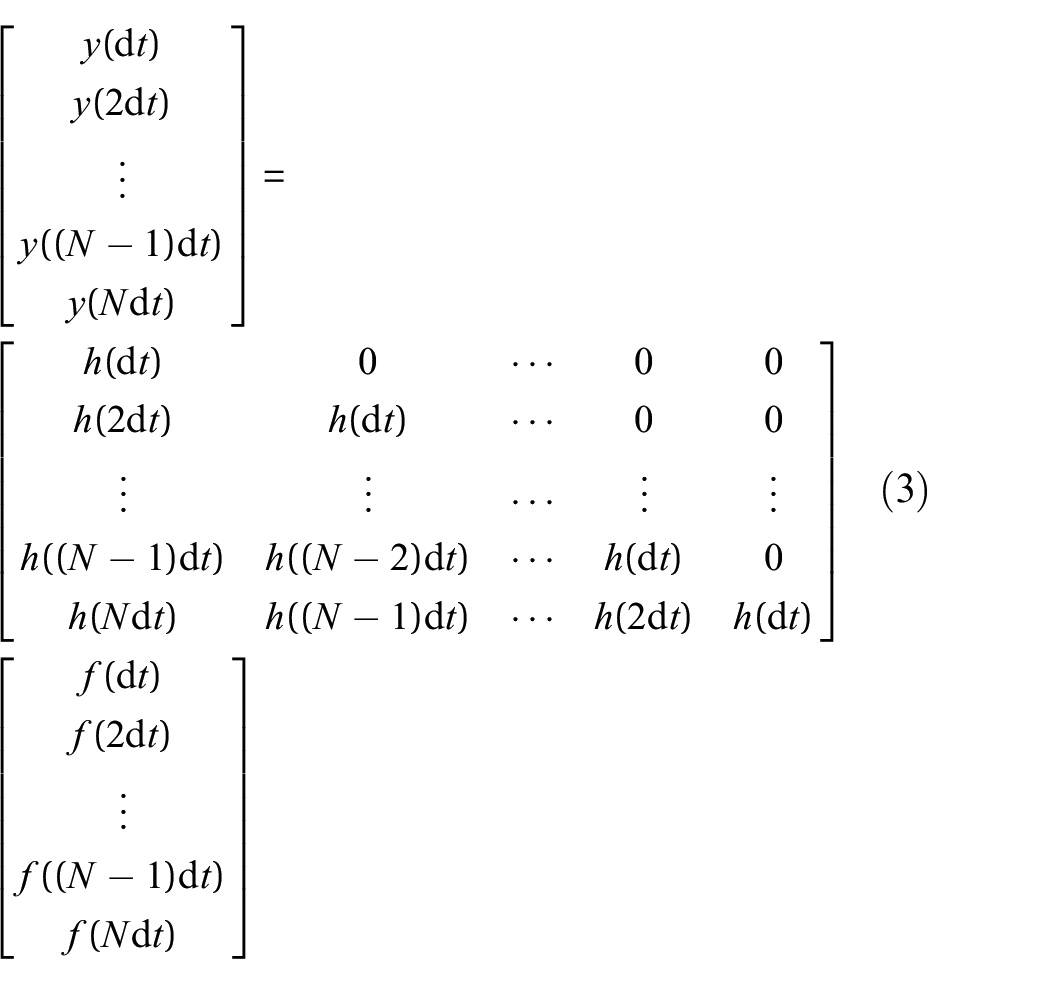
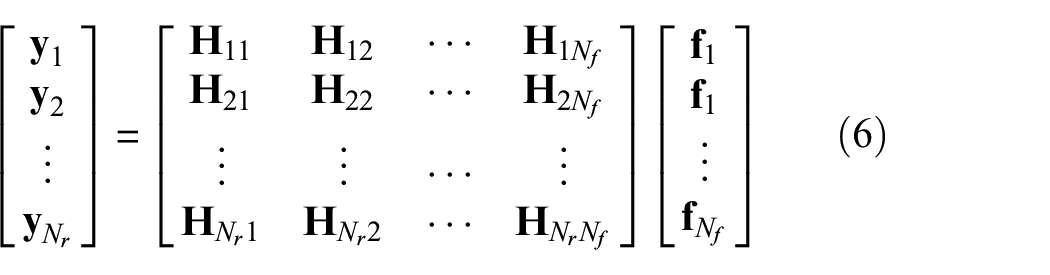
where dt is the sampling time interval, and N is the length of the measured response. Equation (3) can be expressed in a compact matrix-vector form

where

where
where

where

where
L 1-norm regularization
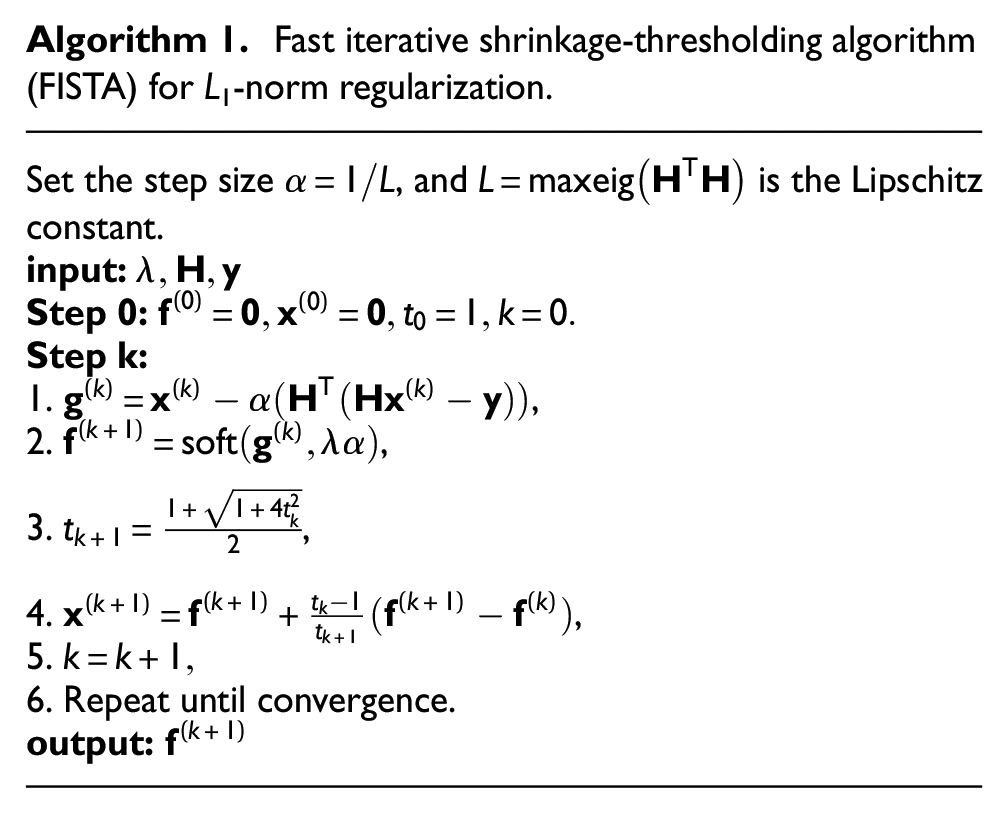
Since under-determined problems such as Equation (8) usually have infinite solutions, regularization methods solve this problem by adding constraints to the least squares formula as penalties. The traditional Tikhonov regularization method based on L2-norm corrects the singular values of the transfer matrix

where

where

where

where T is the threshold. Compared with the traditional L2-norm regularization method, the L1-norm regularization method can obtain sparse solutions. However, as the convex relaxation of the L0-norm, L1-norm imposes a weaker sparse constraint on the result than L0-norm, resulting in defectively sparse force identification results with underestimated impact amplitudes.
Fast iterative shrinkage-thresholding algorithm (FISTA) for L1-norm regularization.
Fully overlapping group sparsity based on Lp-norm regularization
In this section, we describe the proposed method for impact force identification. Firstly, the non-convex Lp-norm is introduced for more accurate estimation of the amplitudes of impact forces. Then, the Lp-norm is combined with group sparsity, and thus more prior information is obtained to reduce the degrees of freedom of the solution in under-determined cases. Finally, AGSTA algorithm is proposed to solved the non-convex optimization problem. The overall scheme framework of the proposed impact force identification method is depicted in Figure 1.
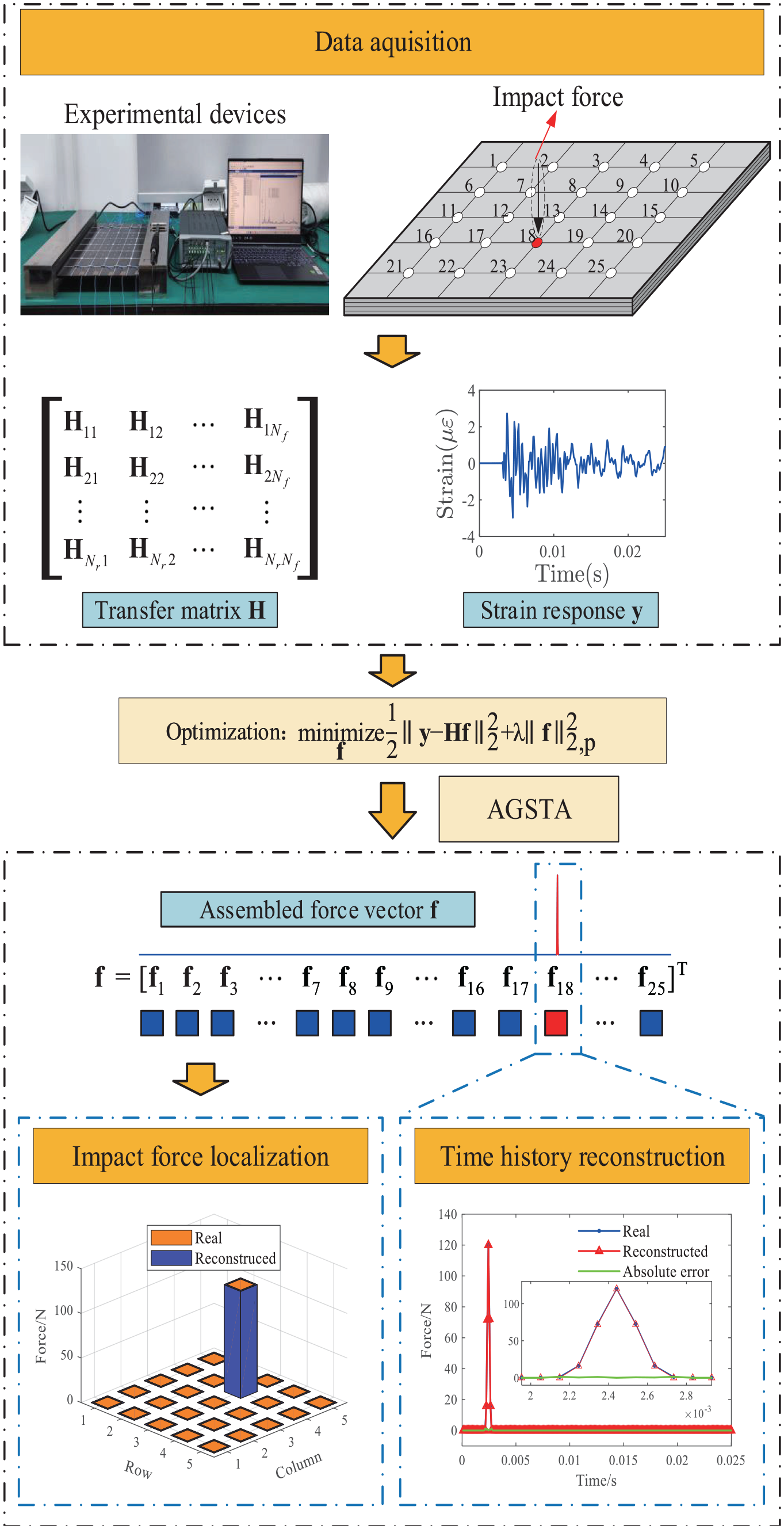
The framework of the proposed impact force identification method.
Lp-norm regularization
To address the amplitude-underestimation problem of L1-norm regularization, the non-convex Lp-norm

where
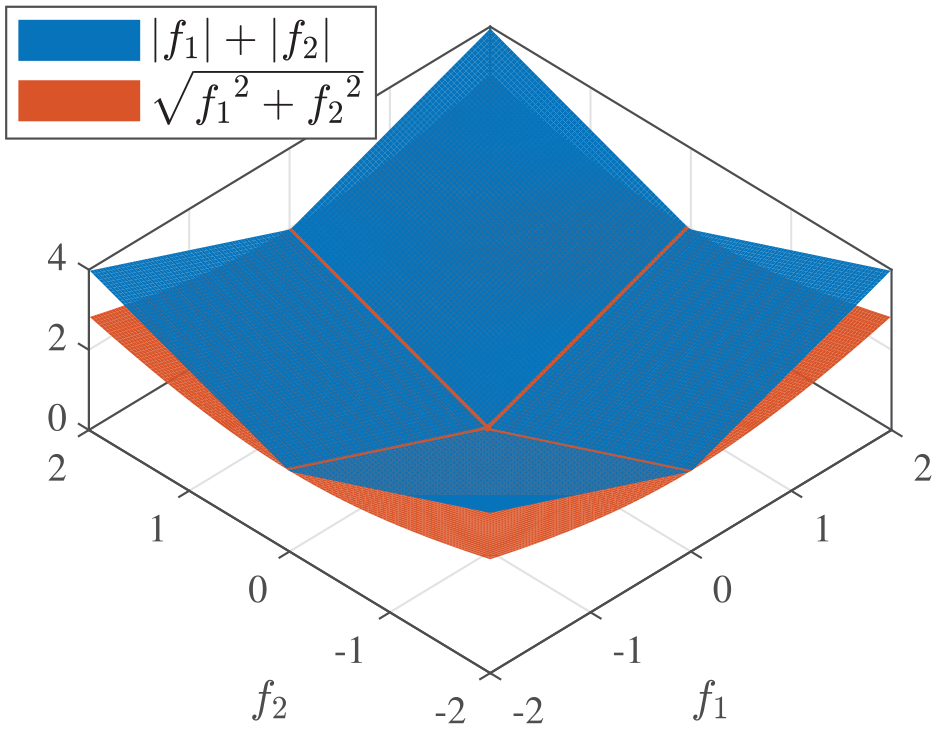
In order to describe the difference between Lp-norm and L1-norm more intuitively, we show the visual comparison results of different norm penalties in Figure 2, where
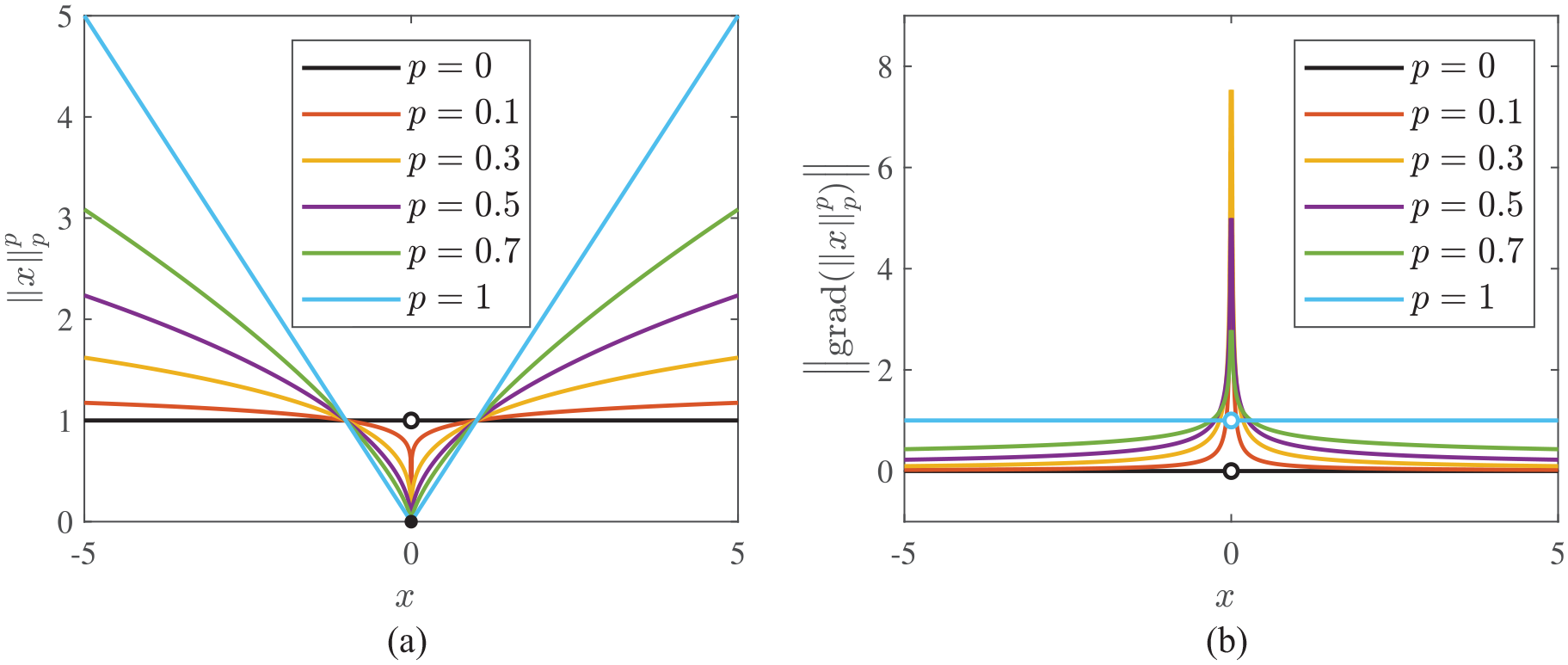
Comparison of L1-norm and Lp-norm penalty terms: (a) one-dimension example of Lp-norm corresponding to differentp values, and (b) gradient of Lp-norm and L1-norm penalty terms.
Lp-norm regularization with fully overlapping sparsity
Since the impact force usually occurs in a brief time and it is a continuous process in the time domain, the impact force vector

where

where

where
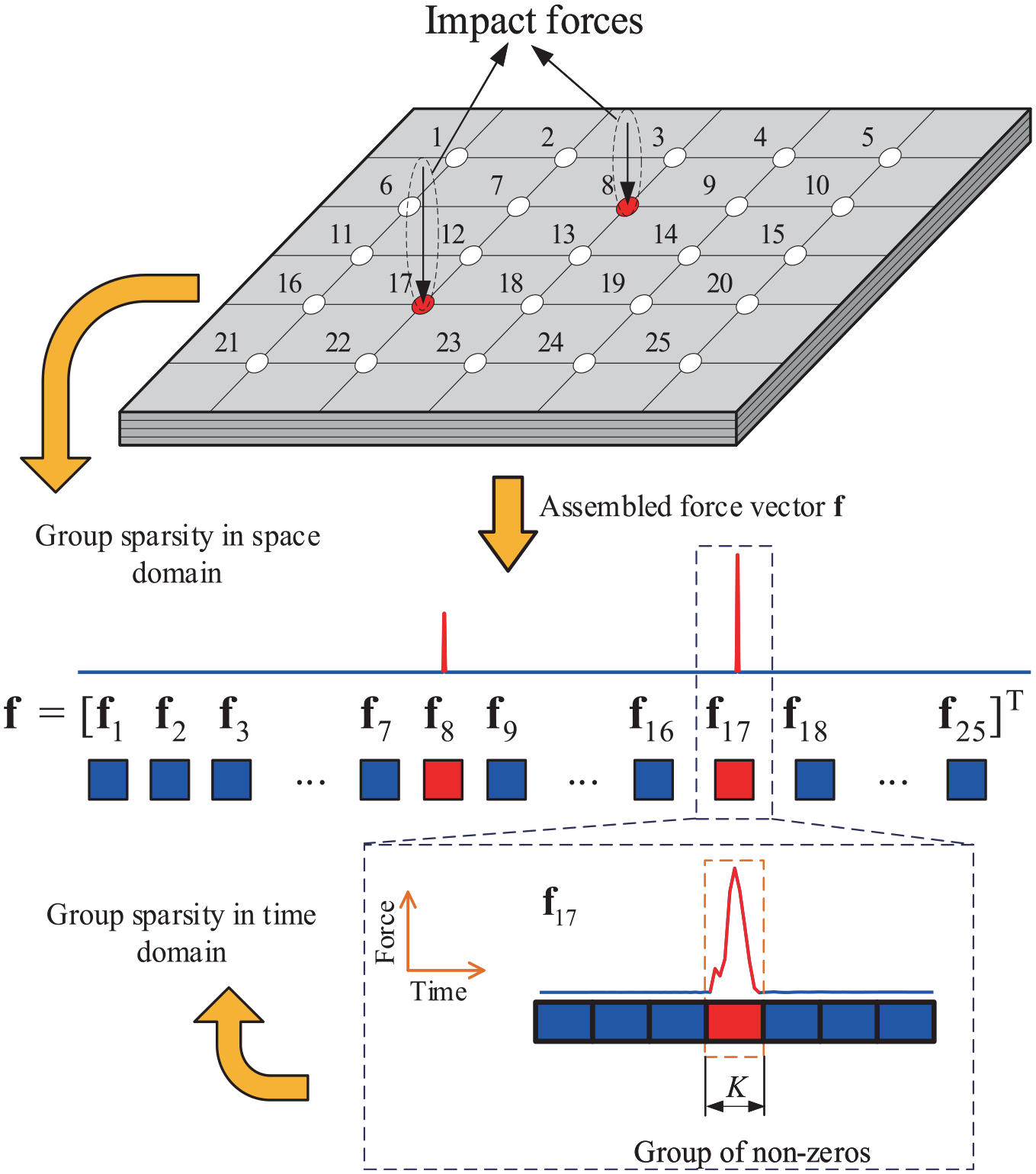
The group sparse structure of the impact force in the time-space domain.
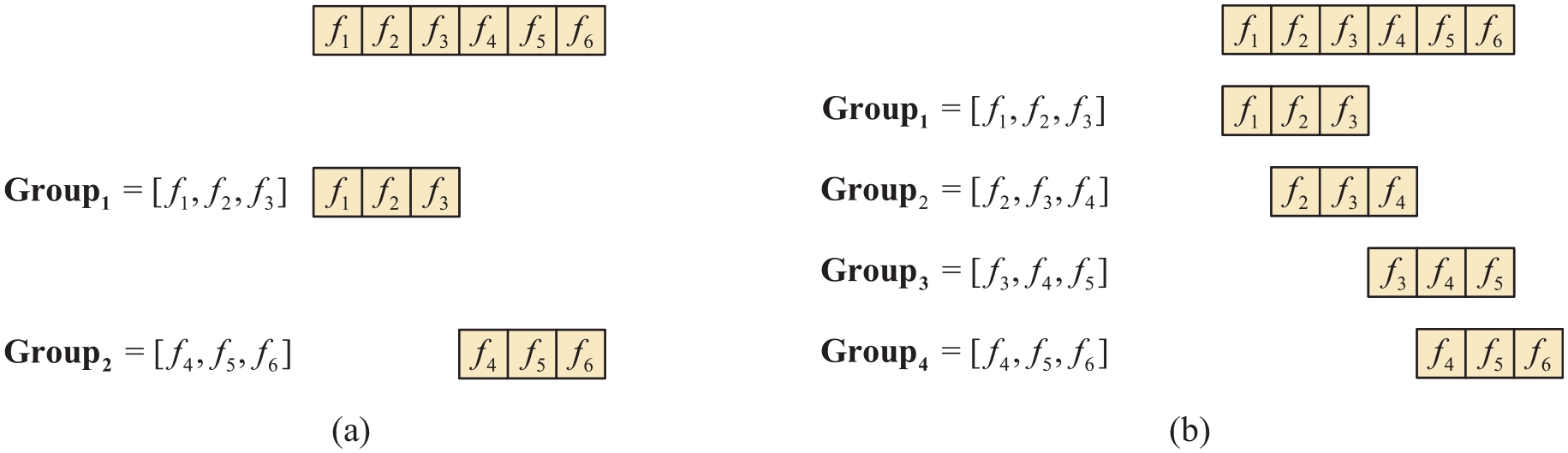
Examples of group structure for a force vector of six elements: (a) the non-overlapping group structure with
Compared with L1-norm, Lp-norm is closer to the morphological features of L0-norm, so it is expected to enhance the sparsity of the solution and improve the accuracy of the impact force identification results. Therefore, in this paper, the L1-norm as the outer layer in L2,1-norm regularizer in Equation (15) is replaced by the Lp-norm. Then we can obtain the FOGSLp model for impact force identification problem
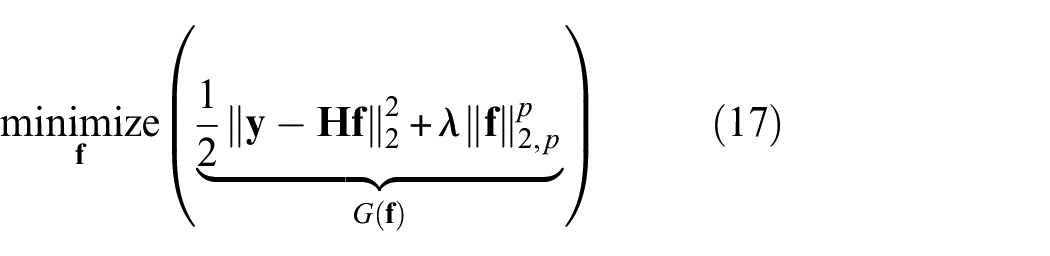
where

Equation (17) is a non-convex optimization problem. Fortunately, under the MM optimization framework, Equation (17) can be solved by constructing easy-to-optimize surrogate functions of non-convex terms. 31
Solution strategy for the FOGSLp method
The key to MM algorithms is constructing an appropriate majorizer
Firstly, the majorizer of the residual term
where L is the Lipschitz constant that is greater or equal to the largest eigenvalue of

For the regularizer

which is an equality when

where

Similarly, the

In order to further illustrate the rationality of choosing Equation (24) for decoupling, we show the
where C is a constant from the superposition of the constants in

The upper bound of the
The optimization problem of Equation (25), that is,

is a weighted L1-norm optimization problem, and the update rule with respect to each element

where

Since

where
Accelerated grouped shrinkage-thresholding algorithm (AGSTA) algorithm.
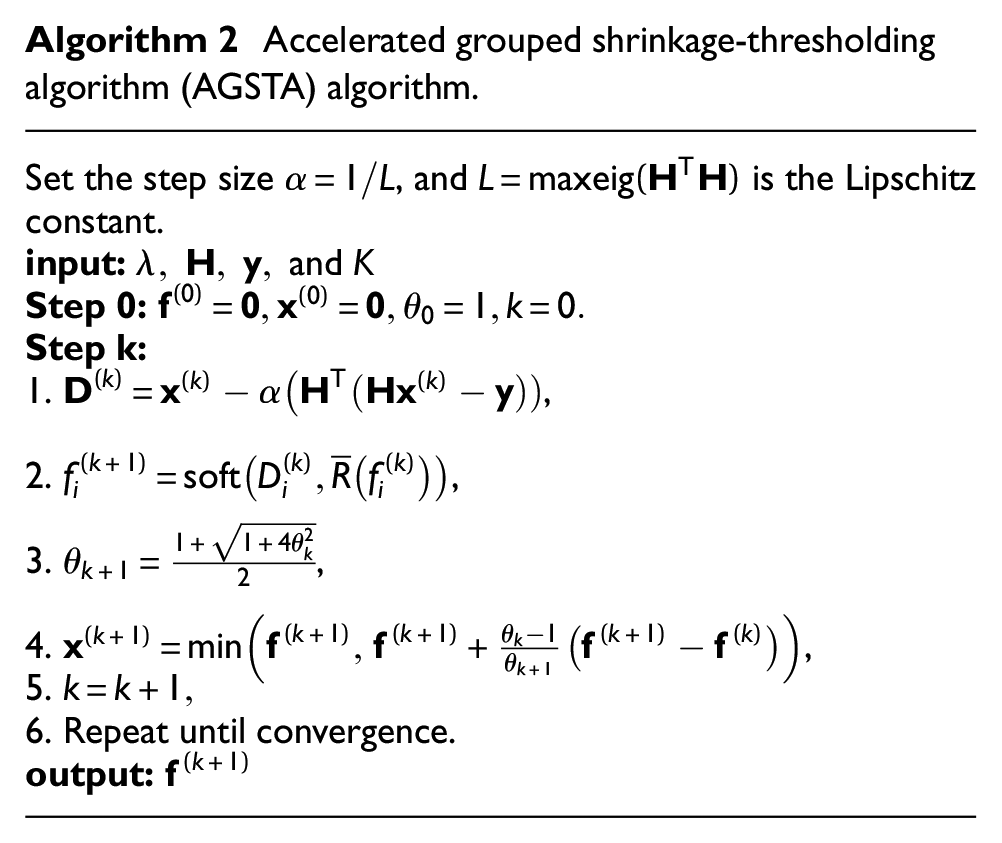
One can see that when
Numerical study
In this section, numerical simulations are carried out to verify the performance and effectiveness of the proposed method on a composite panel with both ends fixed as depicted in Figure 6. The simulation results under different noise levels are compared with existing sparse regularization methods.
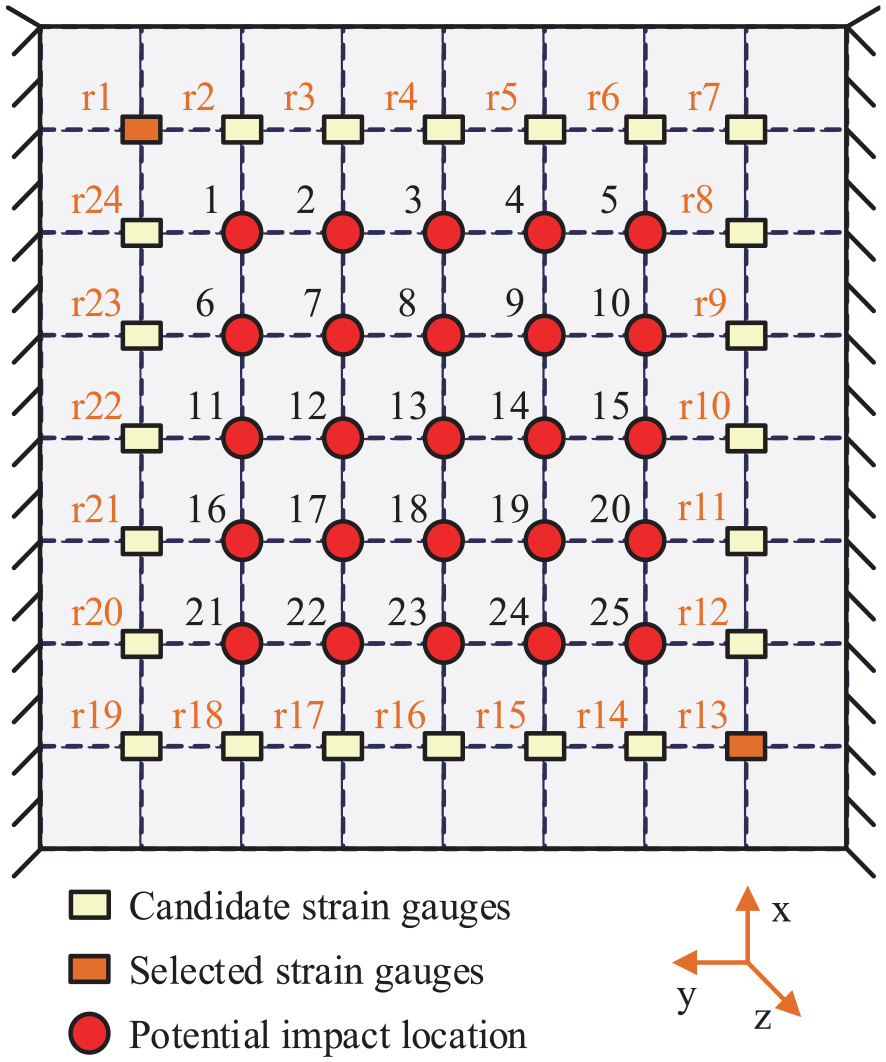
The composite panel with both ends fixed.
In the area of structural health monitoring, the peak value of impact force is closely related to the damage of the structure. The time history of the impact force contains information about the process of impact occurrence. To quantitatively verify the performance of the proposed method, relative error (RE) and peak relative error (PRE) between the exact force


where
To control the computation time within an acceptable range, Algorithms 1 and 2 need to set the termination criterion, which can be expressed as
where the value of ε is set to
Problem description
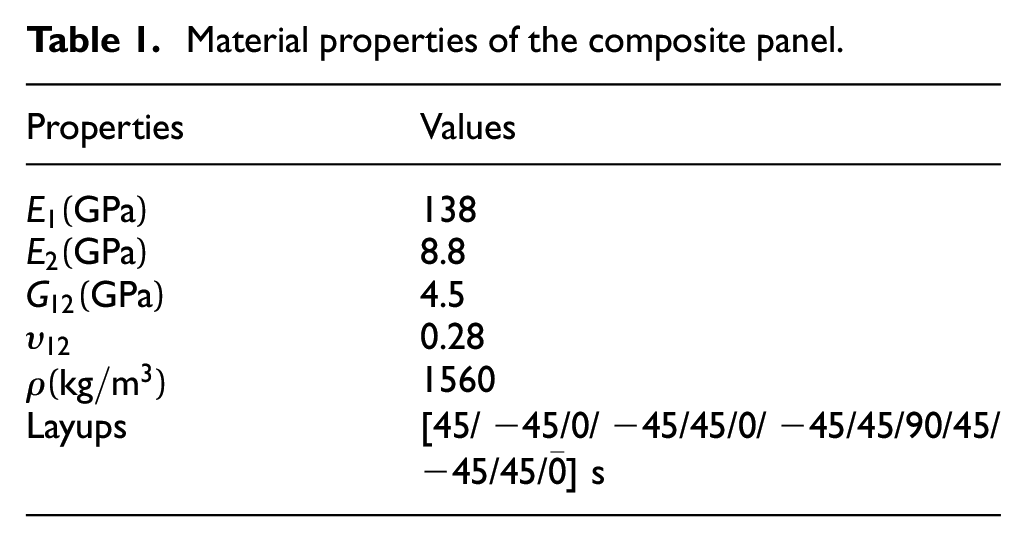
The size of the composite panel is 400 mm × 400 mm × 6 mm, and its left and right ends are both fixed. The material properties of the composite panel are listed in Table 1. As illustrated in Figure 6, the surface of the panel is divided into 64 regular grids with a size of 50 mm × 50 mm, and 25 potential impact points are located at the grid nodes, while r1–r24 are 24 candidate strain gauges. In the numerical simulations, the impact force acts randomly on one of the potential impact points. Responses of two strain gauges at r1 and r13 are selected in this section for force time history reconstruction and localization. The problem of impact force identification is severely under-determined in this condition.
Material properties of the composite panel.
The impact force is assumed to be a Gaussian distribution force, which has an analytical formula

where A decides the amplitude of the impact force,

where
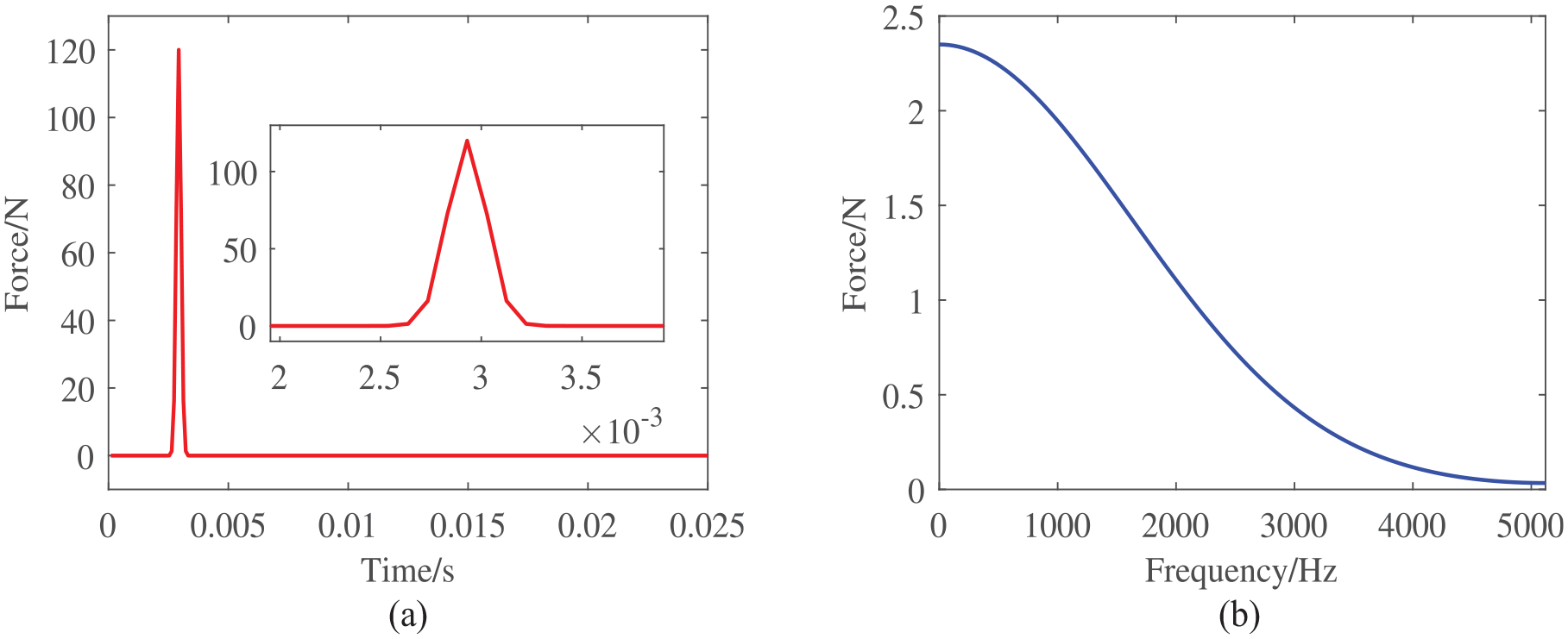
Synthesized impact excitation signal in (a) the time domain and (b) the frequency domain.
Number of the sensors
As stated above, this paper focuses on the situation where the number of sensors is less than the number of impact sources, that is, the under-determined case, as using as few sensors as possible for impact force localization and reconstruction is a challenging problem. And we try to realize impact force identification using a sparse and under-determined sensor configuration. Therefore, it is worth exploring how many sensors can ensure the accuracy of impact force identification. Monte Carlo simulations are performed with the number of sensors varying from 1 to 6. In this case, the impact force defined by Equation (35) is applied to point 6. The measurements are randomly chosen from 24 candidate sensors, and 100 sets of signals are selected for each number of sensors. Moreover, all the strain signals are corrupted by Gaussian white noise with
Figure 8 depicts the average REs and PREs corresponding to different numbers of sensors. Notice that although the average PRE is below 5% when using only one sensor, the average RE is over 10%, which is more than twice that using two sensors. Therefore, in the subsequent cases, two sensors at r1 and r13 are used for impact force identification. The size of the corresponding transfer matrix is 512 × 6400, whose condition number tends to
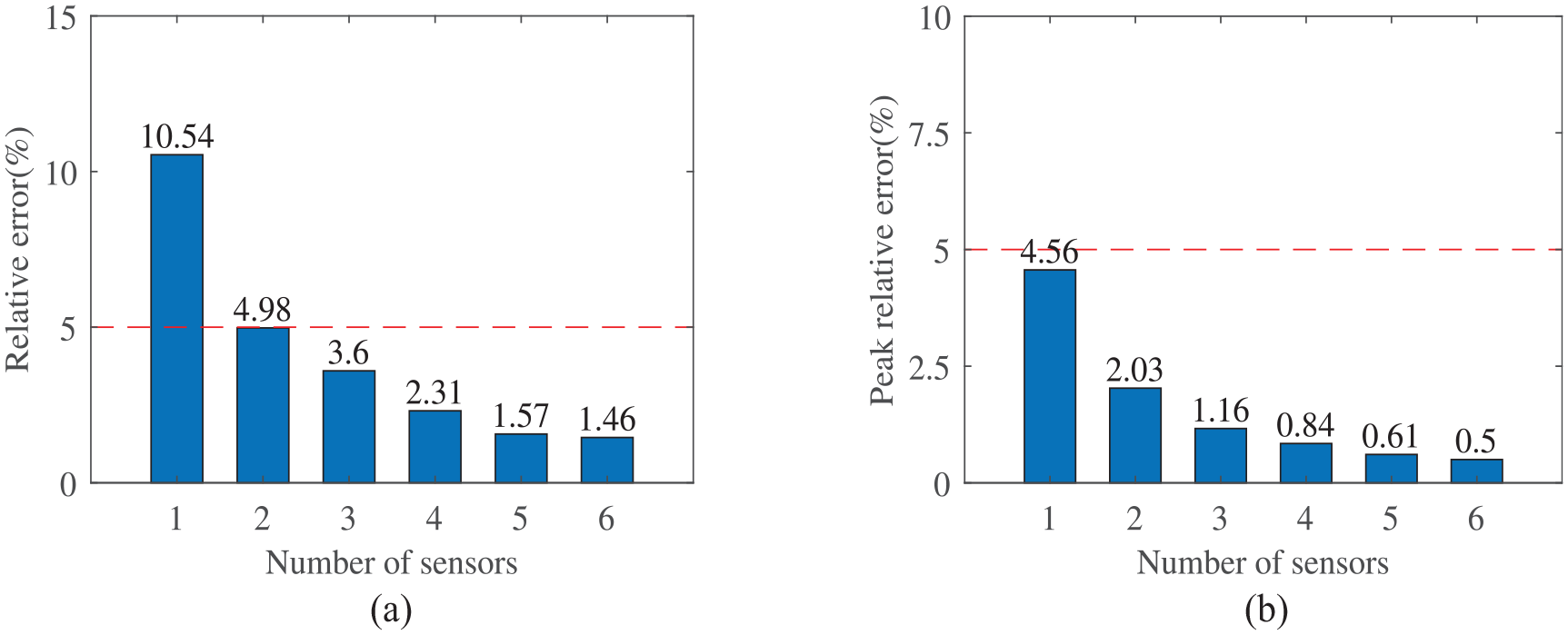
The results of the Monte Carlo simulations while the impact force is applied to point 6: (a) the average REs of FOGSLp using different numbers of sensors ranging from 1 to 6, and (b) the average PREs of FOGSLp using different numbers of sensors ranging from 1 to 6.
Regularization parameter selection principle
In the proposed FOGSLp method, there are three parameters to be selected, namely p, K, and λ. It has been revealed that the L1/2-norm regularization is representative among the Lp-norm
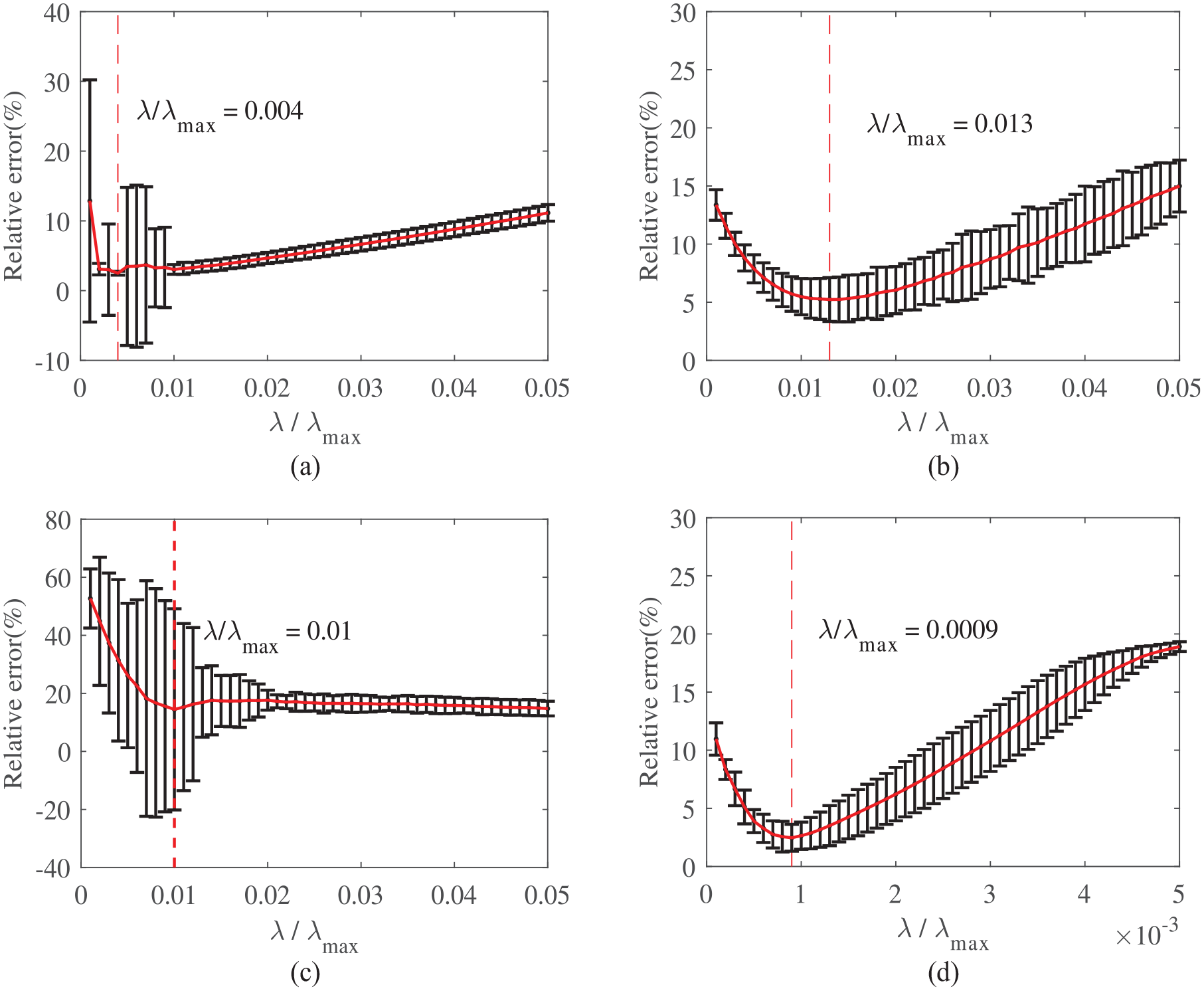
The average REs corresponding to different values of
Impact force identification using the proposed method
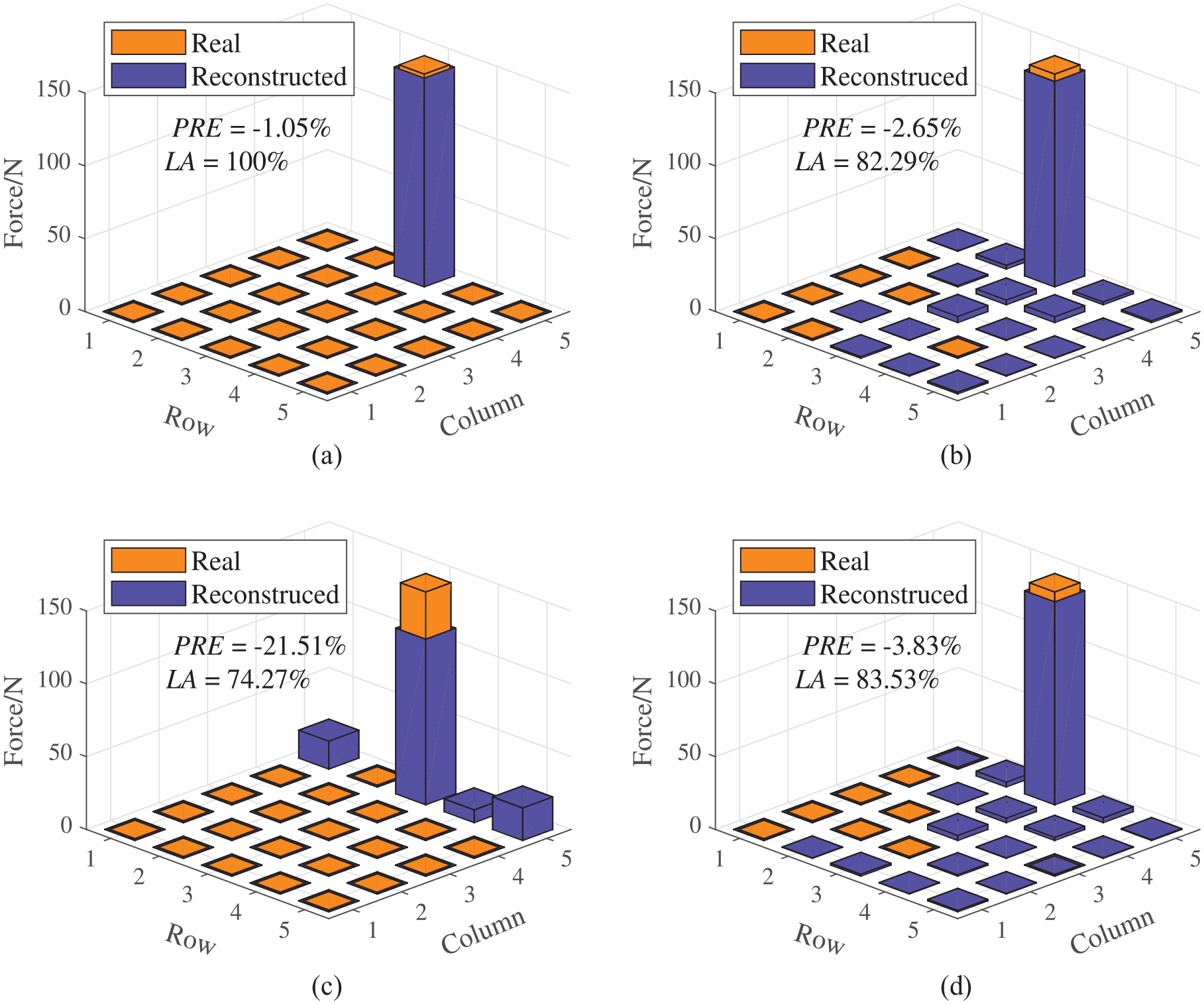
In this section, impact force identification results of the proposed FOGSLp method are compared with the other three regularization methods to validate the effectiveness of the FOGSLp method. In this case, the impact force defined by Equation (35) is applied at point 18, chosen randomly from all 25 potential locations. The strain responses of r1 and r13 are collected simultaneously and mixed by noise with
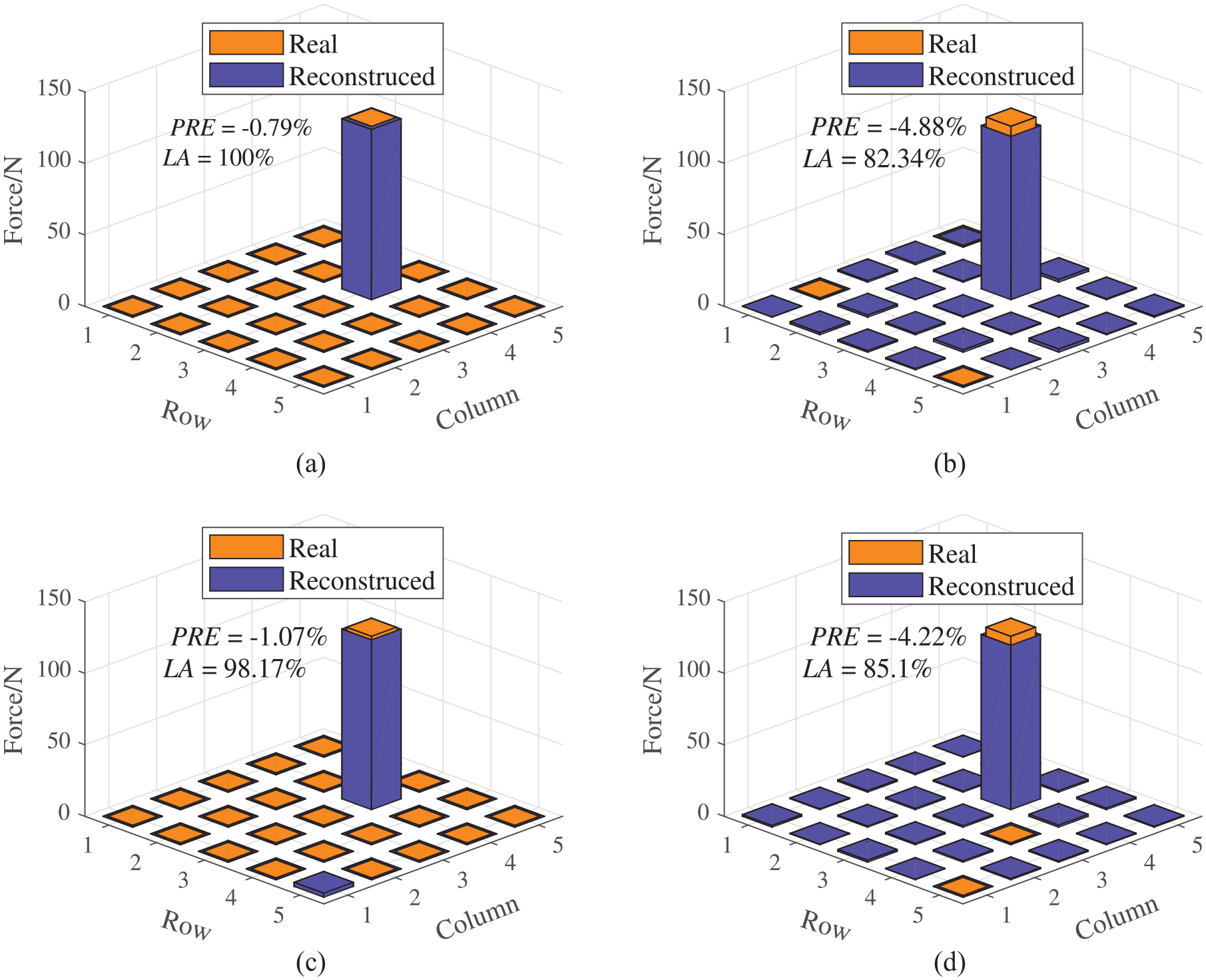
The localization results of the impact force at point 18: (a) the FOGSLp method solution; (b) the L1-norm method solution; (c) the Lp-norm method solution; and (d) the L2,1-norm method solution.
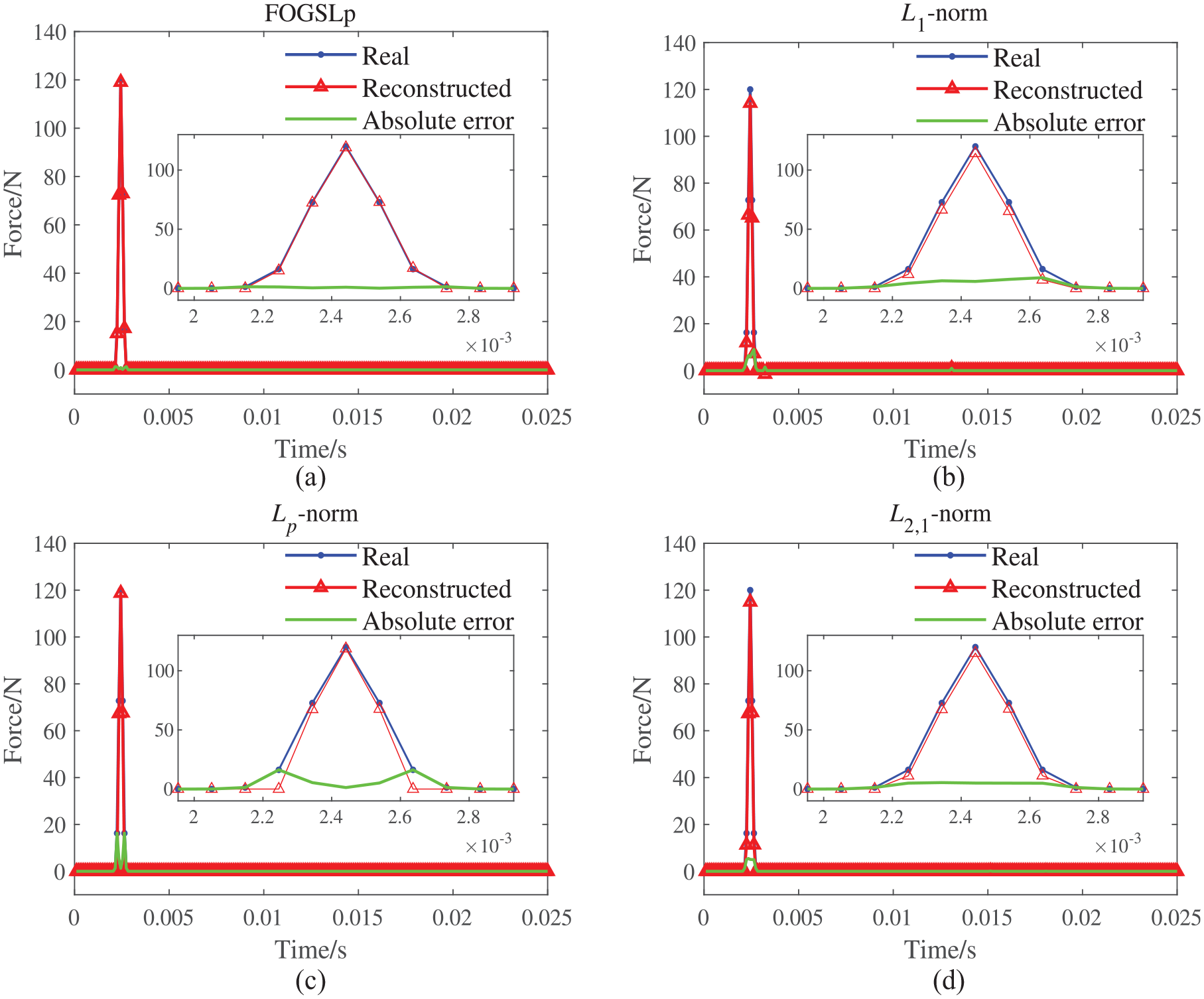
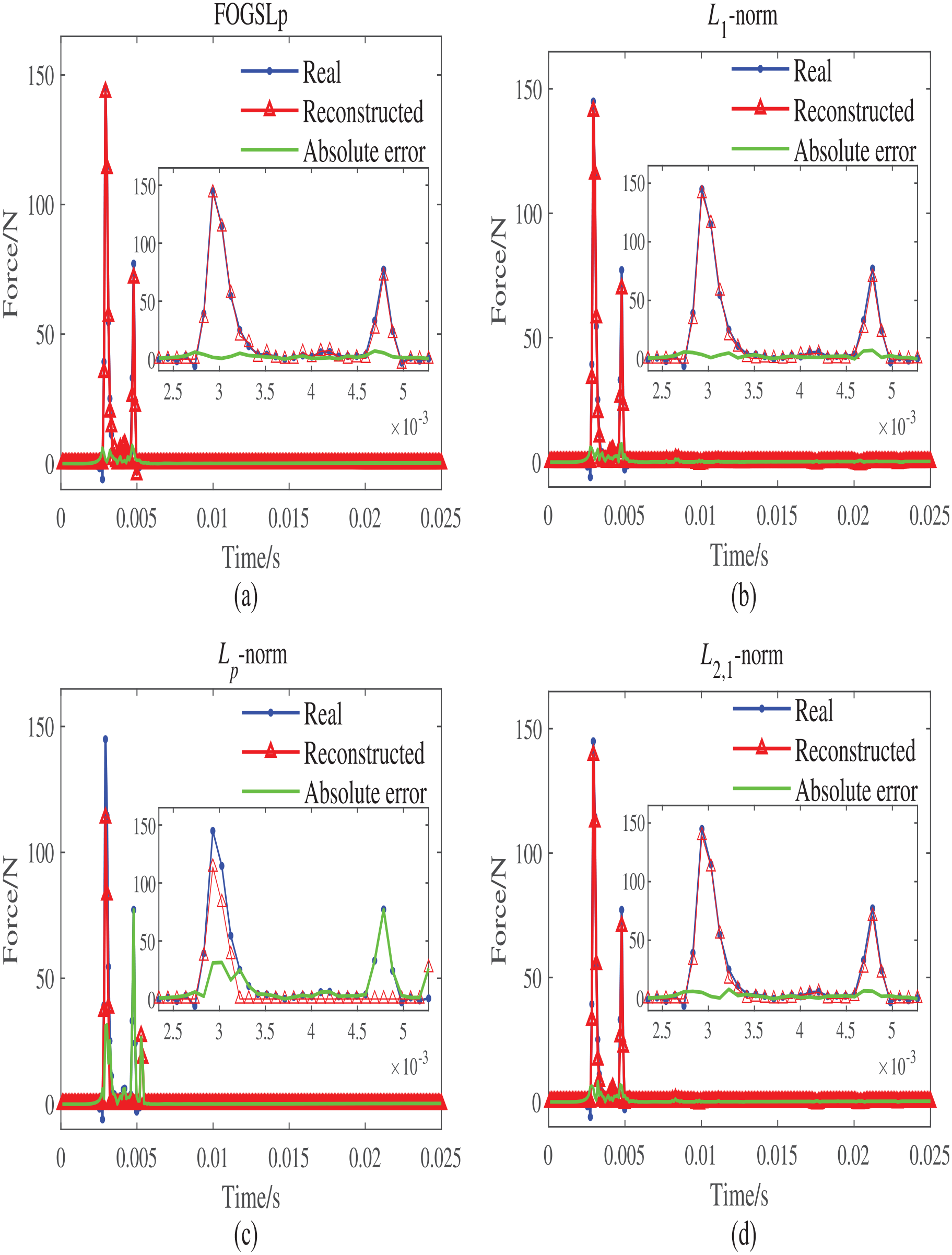
Impact force time history reconstruction results at point 18: (a) the FOGSLp method solution; (b) the L1-norm method solution; (c) the Lp-norm method solution; and (d) the L2,1-norm method solution.
To analyze the computational efficiency of the AGSTA, the cost curves with different values of p and K are shown in Figure 12. In this case, the FOGSLp method solved by AGSTA (
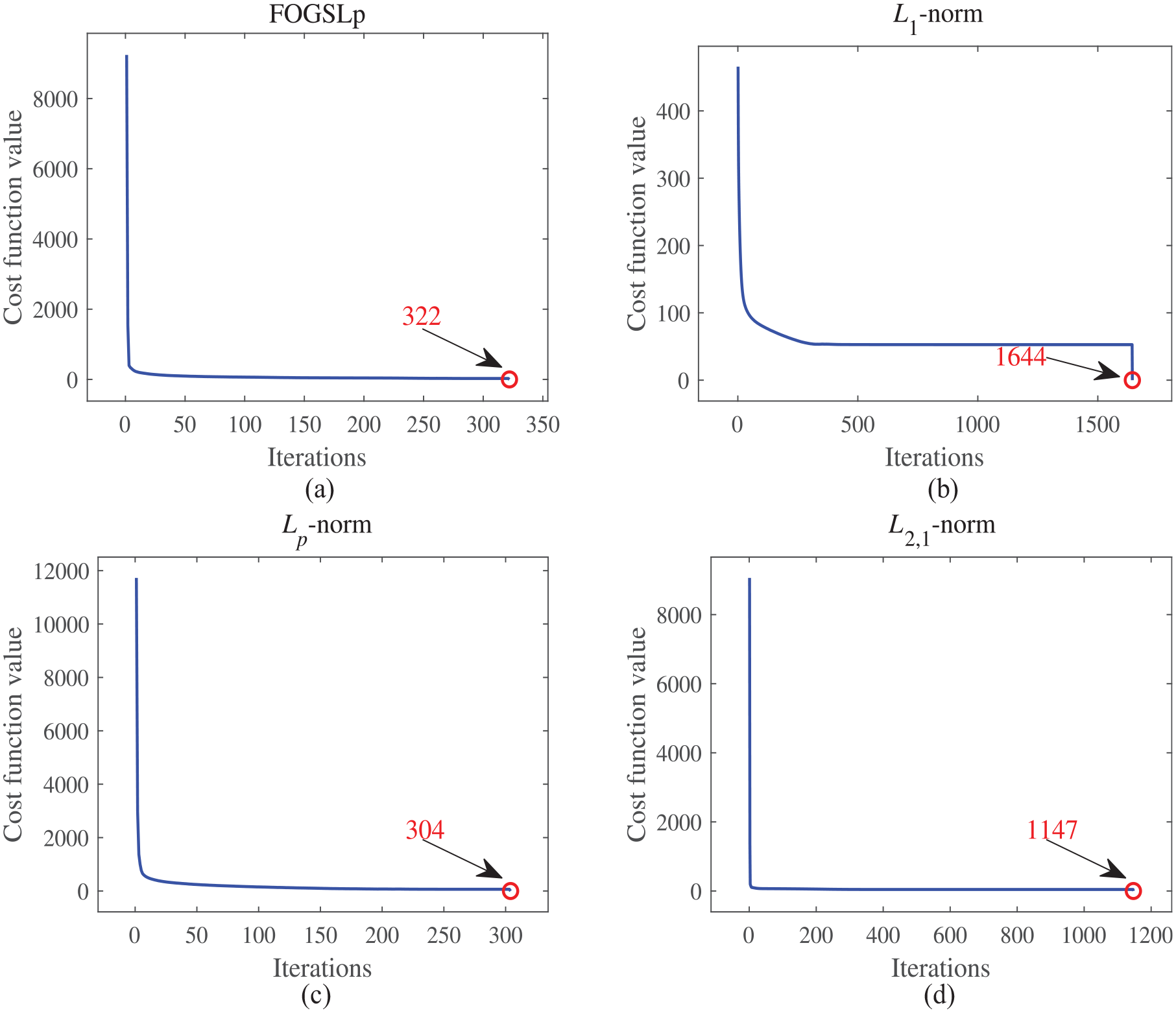
The cost function values with corresponding iterations using (a) the FOGSLp method, (b) the L1-norm method, (c) the Lp-norm method, and (d) the L2,1-norm method.
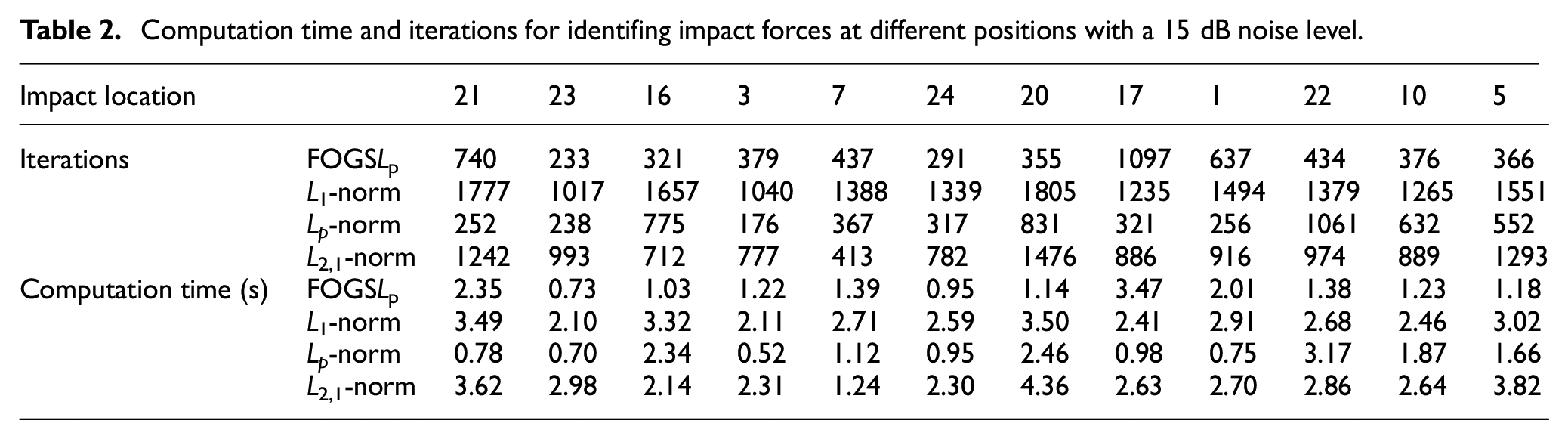
In addition, to further verify the performance of the proposed method, the accuracy of the identification results at 12 randomly selected potential impact points is analyzed, as shown in Figure 13. One can see that the FOGSLp method can accurately localize impact forces and reconstruct their time histories of impact forces acting on each point, and all of its REs and PREs remain below 5%. Moreover, the LAs of the FOGSLp method are 100% at all positions, indicating its stability in localizing impact force. Table 2 indicates the respective iteration numbers and computation time of the FOGSLp method and the other three methods. The Lp-norm method sovled by AGSTA (
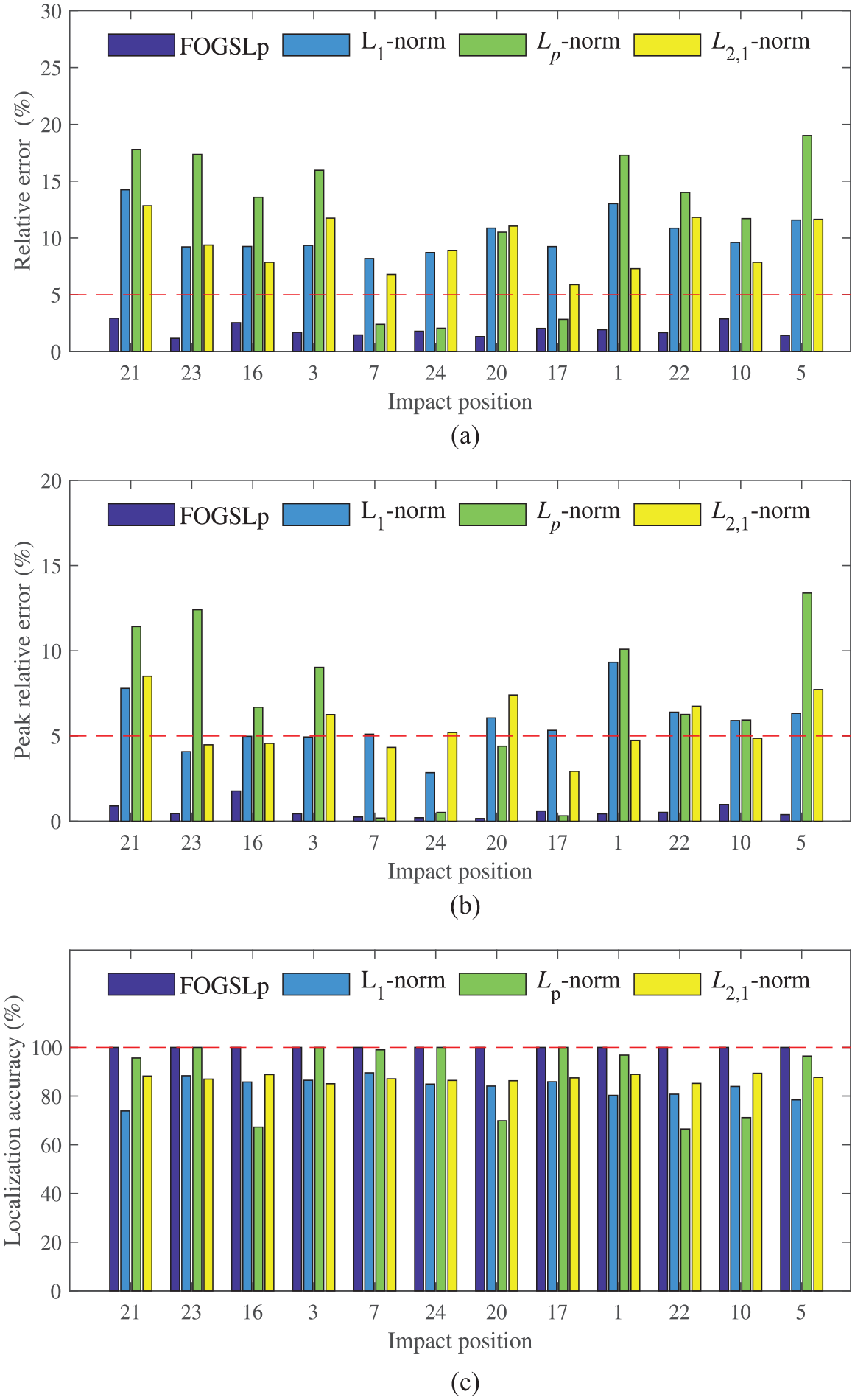
Impact force identification results at different positions with a 15 dB of noise: (a) REs of the FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods; (b) PREs of the FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods, and (c) LAs of the FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods.
Computation time and iterations for identifing impact forces at different positions with a 15 dB noise level.
The effect of the noise level
To inspect the robustness to noise levels of the proposed FOGSLp method, different noise levels, that is, 30, 25, 20, 15, 10, and 5 dB, are considered here. The impact force is applied to point nine randomly here. Considering that the parameter
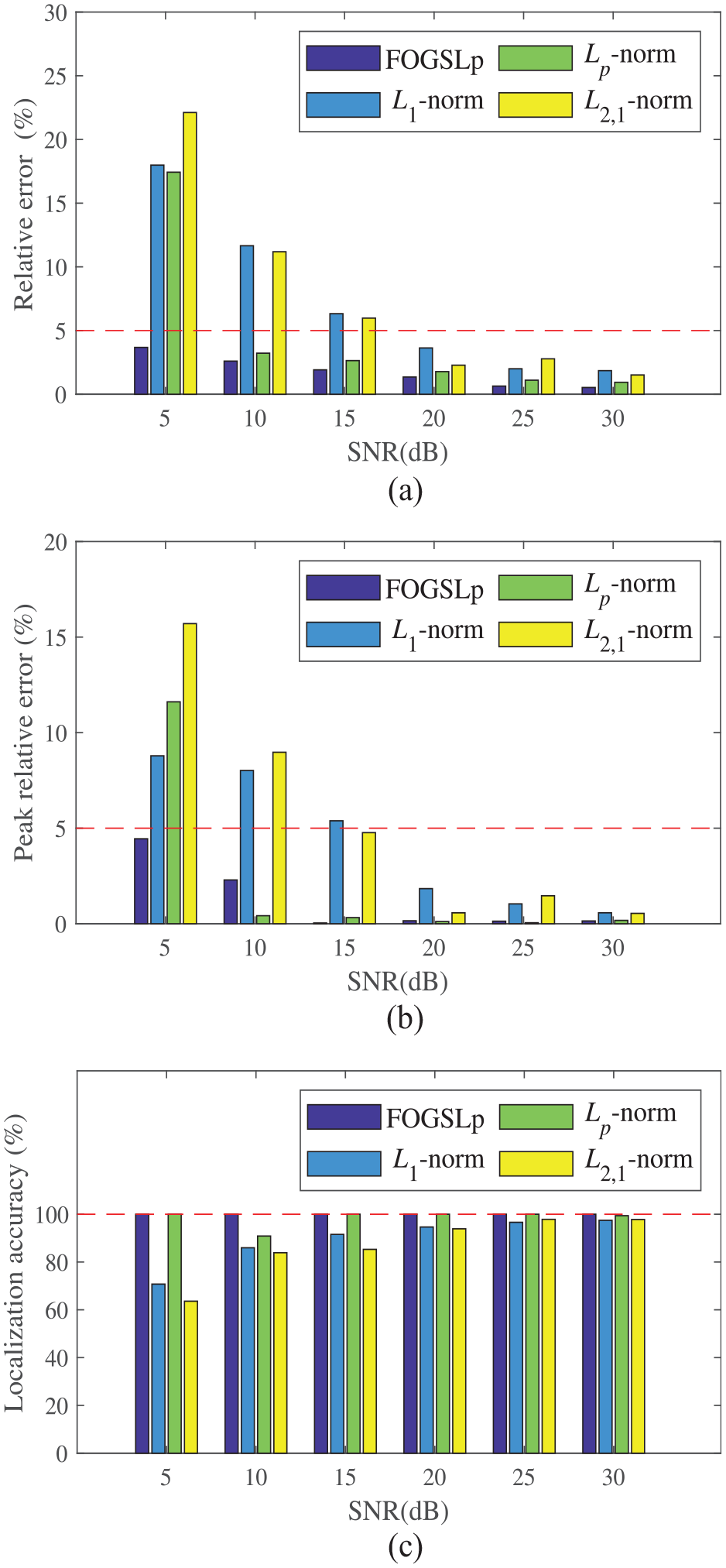
Impact force identification results under different noise levels: (a) REs of FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods, (b) PREs of FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods, and (c) LAs of FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods.
Experimental validation
In this section, impact force identification experiments are conducted on a composite panel with both ends fixed with similar properties in the simulations. The experiment setup is shown in Figure 15. Here, two strain gauges are also used to monitor 25 potential impact points, keeping the same transfer matrix dimension as in the simulation study. Once more, the performance and feasibility of the FOGSLp method are compared with the L1-norm method, Lp-norm method, and L2,1-norm method.
Problem description
The layups of the composite panel employed in the impact force identification experiments are consistent with those in the simulation study, but the dimension slightly differs from that in the simulations, which is 400 × 300 × 6 mm as shown in Figure 15. The dynamic behavior of the compiste panel is considered linear, as in the simulations. The surface of the panel is divided into 48 regular grids of 50 × 50 mm, of which 25 nodes are set as potential impact points, and nine strain gauges are placed at r1–r9, respectively, to measure the responses of the impact. The impact force is applied by an impact hammer (PCB® 086C03; PCB Piezotronics, Inc., Buffalo, NY, USA, with sensitivity 2.25 mV/N), and a PZT force sensor integrated into the hammer head records the time history of the applied impact force for reference. Referring to the simulation study, here we select the strain responses of r4 and r5 (with sensitivity 51.1 and 47.5 mV/µε, respectively) to identify the impact force. The impact force and strain signals are acquired simultaneously with a sampling frequency of 10,240 Hz using the Leuven Measurement System (LMS) SCADAS III data acquisition system. The transfer matrix
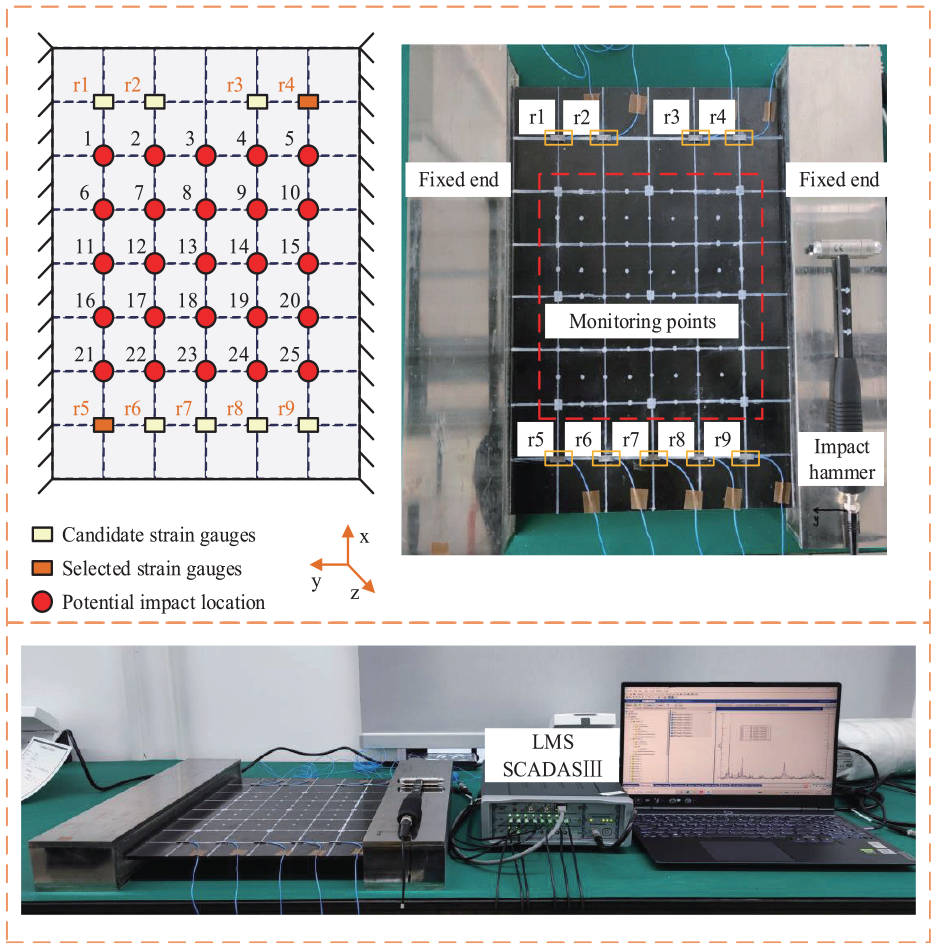
The set-up of the impact force identification experiment on the composite panel.
Results and discussion
In this case, the impact force is imposed at point 23, and the strain responses are measured by strain gauges at r4 and r5. Impact modal tests are conducted to obtain the transfer matrices, and the impact forces and corresponding strain signals are shown in Figure 16. Then different impact forces are imposed at point 23 for validation purposes, as depicted in Figures 17 and 20. Since the actual value of the impact force is unknown in practical applications, the selection principle for parameter
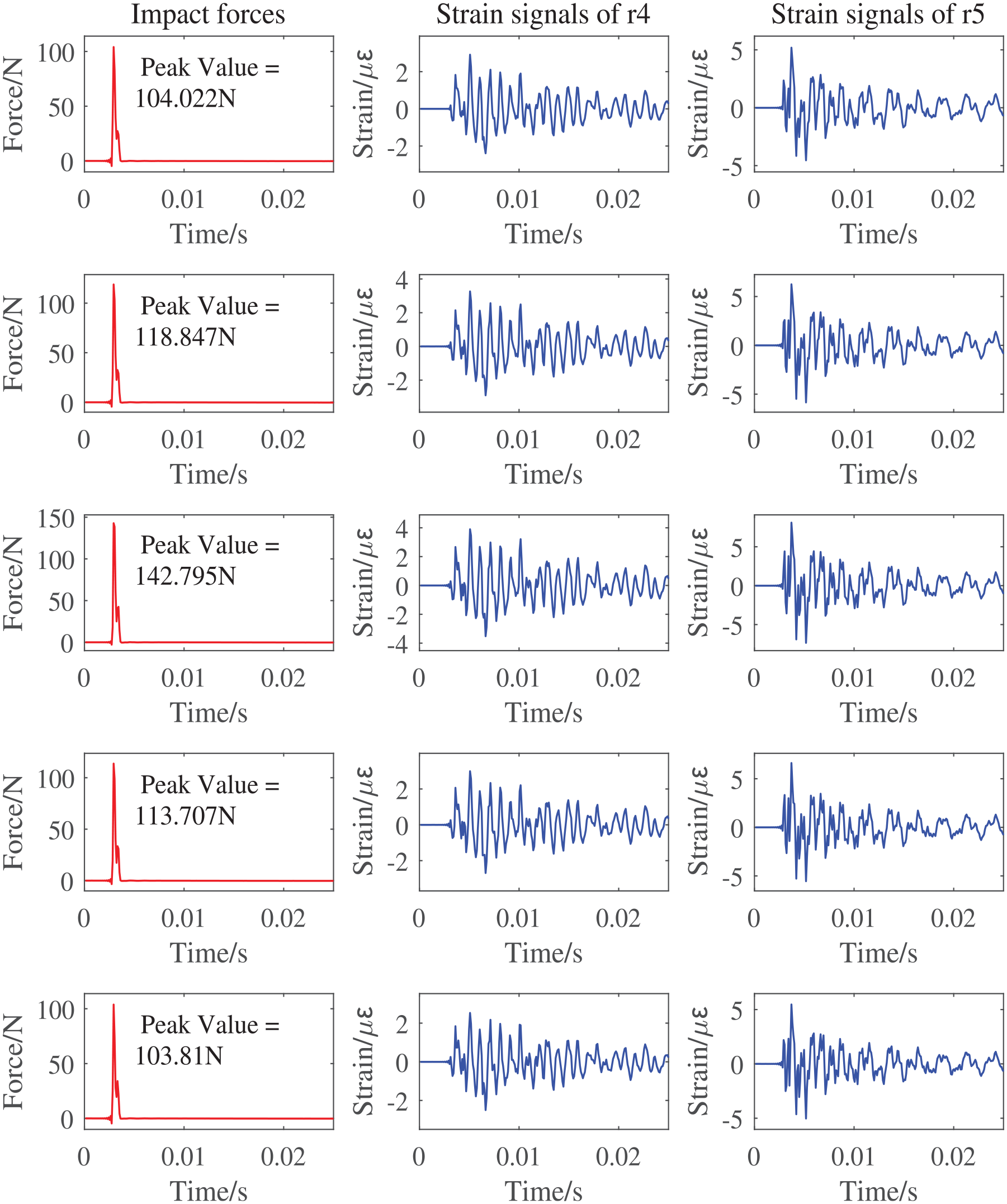
The impact forces and corresponding strain signals used to obtain the transfer matrices between point 23 and r4, and between point 23 and r5.
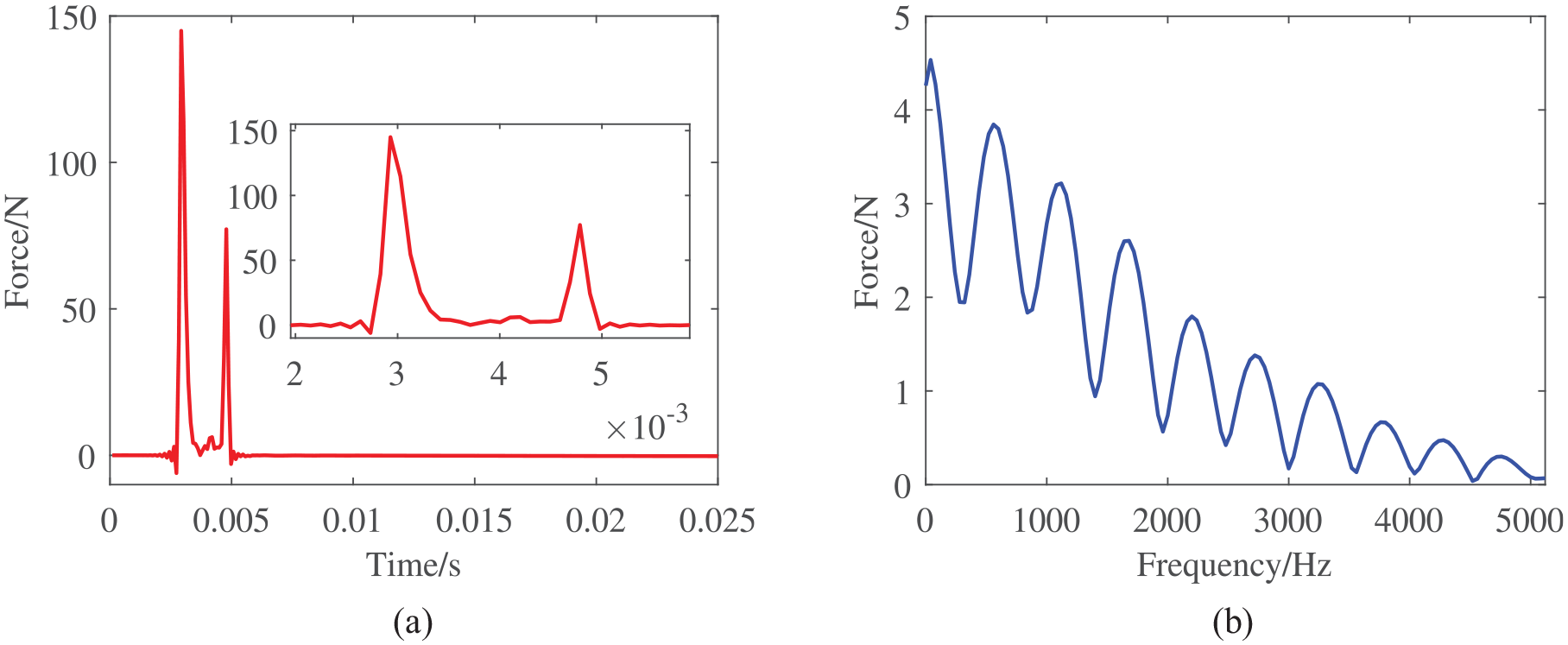
The shape of the impact force excited by the hammer at point 23 in (a) the time domain and (b) the frequency domain.
Figure 18 shows the localization results of the impact force on the composite panel using the FOGSLp method and the other three sparse regularization methods from two strain responses. One can see that the FOGSLp method accurately localizes the impact force acting at point 23 with
The localization results of impact force excited by the hammer at point 23: (a) the FOGSLp method solution; (b) the L1-norm method solution; (c) the Lp-norm method solution; and (d) the L2,1-norm method solution.
Figure 19 shows the reconstructed time history of the impact force. It can be seen that two impact forces are applied in an extremely brief time in the experiment. As demonstrated in the magnified time history figure, the FOGSLp method accurately reconstructs the time histories of two consecutively applied impact forces with the RE of
The time history reconstruction results of the impact force excited by the hammer at point 23: (a) the FOGSLp method solution; (b) the L1-norm method solution; (c) the Lp-norm method solution; and (d) the L2,1-norm method solution.
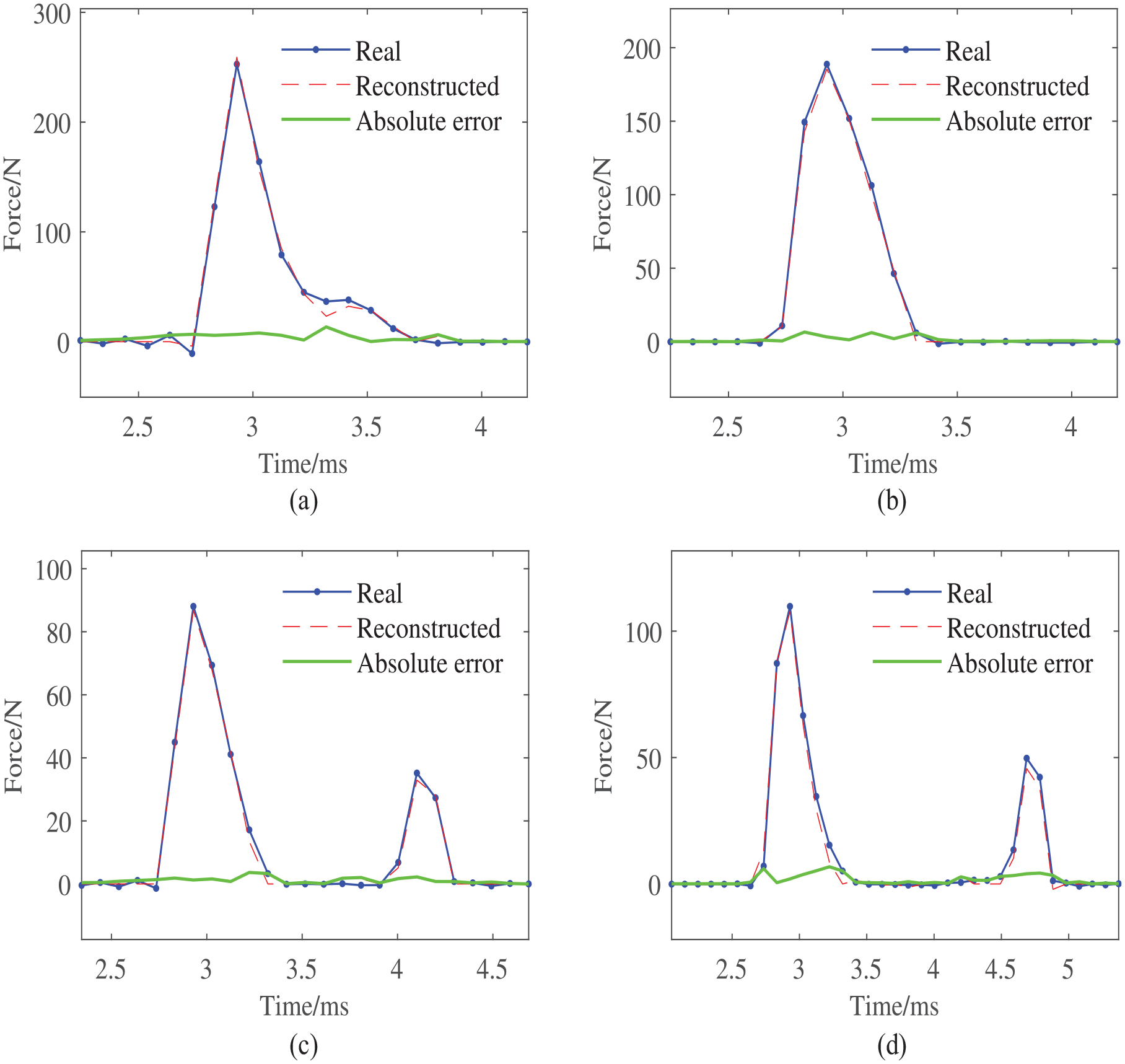
The reconstruction results of different impacts excited at point 23 using the FOGSLp method: (a)–(d) four impact forces with different durations and magnitudes.
To further verify the computational efficiency of the proposed method, the convergence rates of different methods are analyzed, as shown in Figure 21. In this case, the FOGSLp method converges to the set accuracy after 834 iterations, taking a total of 2.64 s. In contrast, the L1-norm and L2,1-norm methods converge after more iterations, and the computation time is more than twice that of the FOGSLp method, costing 5.64 and 5.06 s, respectively. Although the Lp-norm method also converges fast, the final identification result is not satisfying, which is due to the fact that it only obtains the local optimal solution and cannot guarantee the global optimal solution. Figure 22 shows the corresponding REs and PREs of the FOGSLp method and the other three methods at 12 randomly selected locations. One can see that the FOGSLp method can keep its PREs below
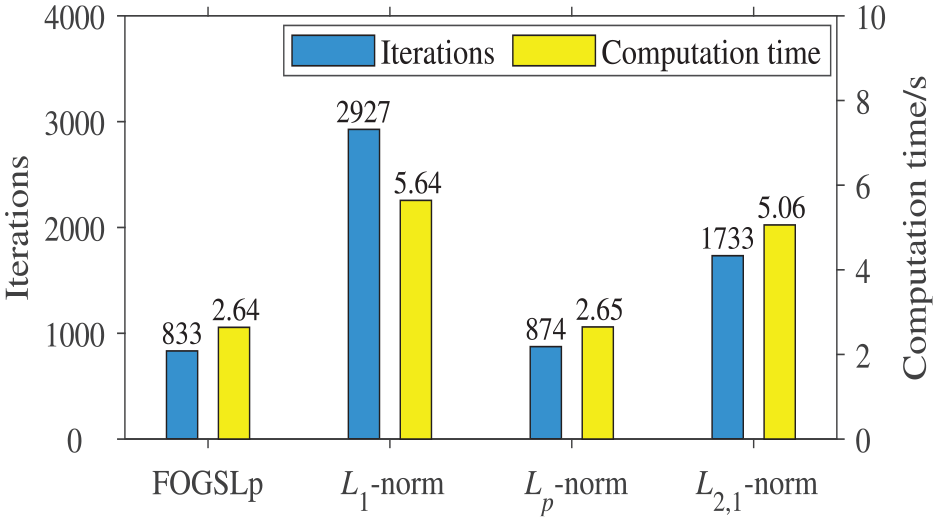
The computation time and iterations of FOGSLp and the other three methods while the impact force is excited at point 23.
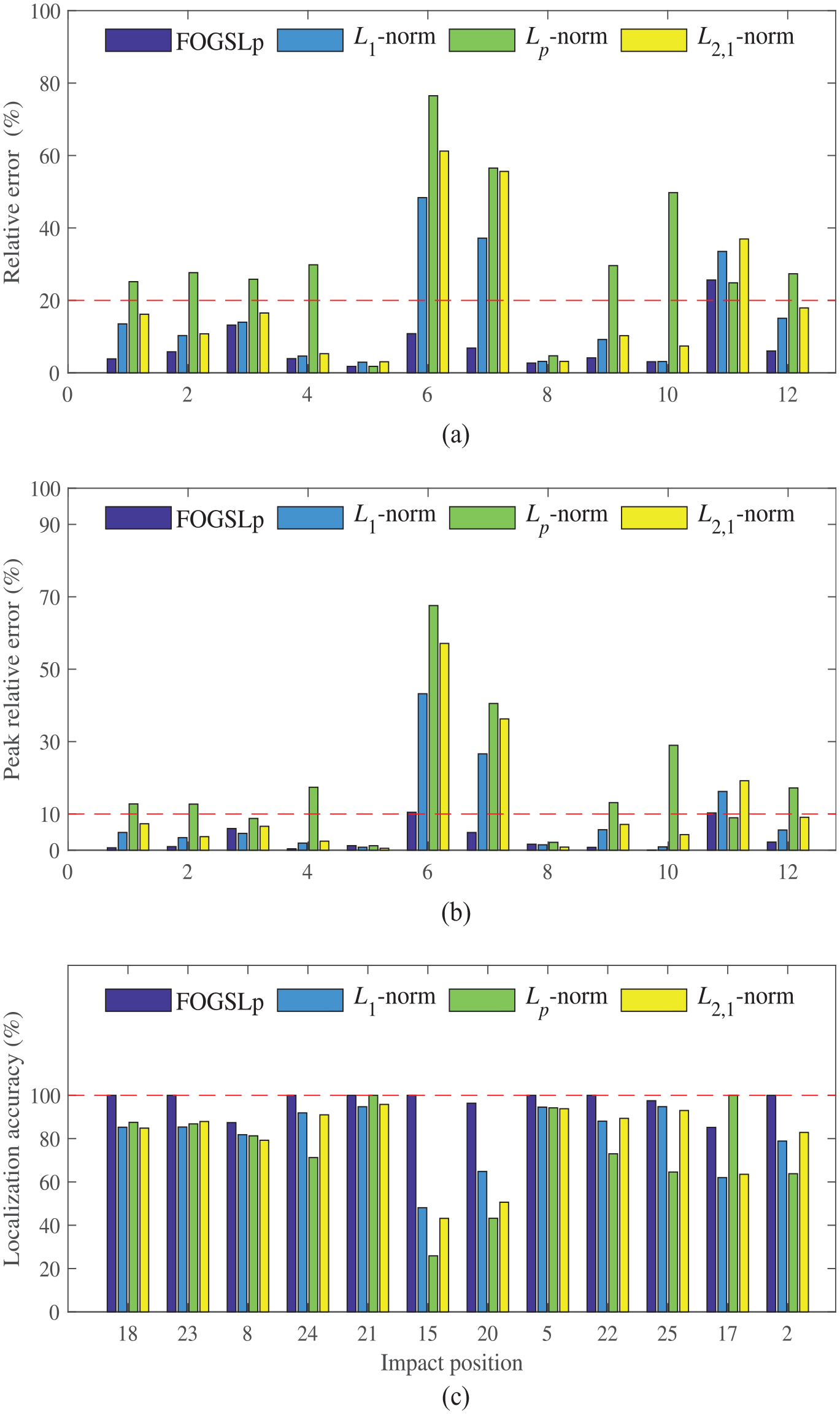
Impact force identification results at different positions: (a) REs of FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods; (b) PREs of FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods; and (c) LAs of FOGSLp, L1-norm, Lp-norm, and L2,1-norm methods.
Conclusions
To sum up, a novel FOGSLp method is proposed for the inverse problem to localize and reconstruct impact forces simultaneously. More critical piors of impact forces are applied to penalty function by combining the promotion of sparsity of the non-convex Lp-norm and the fully overlapping group sparsity, and therefore stronger constraints are introduced to stabilize the solution in under-determined case. Then an AGSTA algorithm is proposed to solve the non-convex optimization problem under the MM framework, which constructs a surrogate function to optimize the non-convex and element-coupled objective function. Moreover, modified Nesterov’s acceleration strategy is adopted to increase the convergence rate. The performance of the proposed method is verified from the perspective of simulations and experiments in under-determined case by comparing with L1-norm, Lp-norm, and L2,1-norm regularization methods. The RE-minimization principle and the L-curve criterion are applied for the regularization parameter selection in simulations and experiments, respectively. Both simulations and experiments indicate that the FOGSLp method can obtain satisfactory results by using two sensors while monitoring 25 potential positions, which is a severely under-determined condition, and the FOGSLp method always outperforms the three other methods with lower REs and PREs and higher LAs. Furthermore, in simulations, the FOGSLp method consistently performs best under different noise levels, whose PREs and REs remain below 5% even at 5 dB noise level, which demonstrates the excellent robustness of the FOGSLp method. Finally, the experimental results illustrate the effectiveness of the proposed FOGSLp method in practical applications.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (Nos. 52075414 & 51975583), and China Postdoctoral Science Foundation (No. 2021M702595).