
Abstract
Flood-induced scour is among the most common external causes of bridge failures worldwide. In the United States, scour is the cause of 22 bridges fails every year, whereas in the UK, it contributed significantly to the 138 collapses of bridges in the last century. Scour assessments are currently based on visual inspections, which are time-consuming and expensive. Nowadays, sensor and communication technologies offer the possibility to assess in real time the scour depth at critical bridge locations; yet, monitoring an entire infrastructure network is not economically feasible. A way to overcome this limitation is to instal scour monitoring systems at critical bridge locations, and then extend the piece of information gained to the other assets exploiting the correlations present in the system. In this article, we propose a scour hazard model for road and railway bridge scour management that utilises information from a limited number of scour monitoring systems to achieve a more confined estimate of the scour risk for a bridge network. A Bayesian network is used to describe the conditional dependencies among the involved random variables and to update the scour depth distribution using data from monitoring of scour and river flow characteristics. This study constitutes the first application of Bayesian networks to bridge scour risk assessment. The proposed probabilistic framework is applied to a case study consisting of several road bridges in Scotland. The bridges cross the same river, and only one of them is instrumented with a scour monitoring system. It is demonstrated how the Bayesian network approach allows to significantly reduce the uncertainty in the scour depth at unmonitored bridges.
Keywords
Introduction and background
Scour is defined as the excavation of material around bridge foundations as a result of the erosive action of flowing water. The phenomenon is usually classified into three different types, namely, degradation, constriction (or contraction) and local scour, 1 which generally work simultaneously to give the total scour. 2 When the depth of scour develops significantly, the load-bearing capacity of bridge foundations may be severely compromised, leading to structural instability and ultimately catastrophic failure. 3
Flood-induced scour is among the main causes of bridge collapses, resulting in significant loss of life, traffic disruption and economic losses. 4 In the United States, a review of 1502 river crossing failures occurring in the period 1966–2005 has shown that an average annual rate of 22 bridges were closed or failed due to scour. 5 In the UK, there are more than 60,000 highway and railway bridges crossing waterways 6 and almost 95,000 spans and culverts are susceptible to scour processes. According to van Leeuwen and Lamb, 7 abutment and pier scour were responsible of 138 rail bridge failures recorded in the UK during the period 1846–2013. In the past decade in Cumbria, a non-metropolitan county in North-West England, more than 100 bridges were damaged or destroyed (e.g. the Northside bridge in 2009 and the Pooley bridge in 2015 were washed away).8,9 Furthermore, the winter storms of 2015 resulted in severe damage to bridges across Scotland and other parts of England. 10 This includes the Lamington viaduct, which resulted in the closure of the West Coast mainline between Glasgow and London for nearly 2 months due to a scour failure at one of its piers. 11
The scour risk assessment is a crucial element of any bridge management system. This evaluation should combine information on the hazard, the bridge vulnerability and the consequences of failure. 12 Regardless of the approach employed, an accurate estimation of the scour hole at the foundations of bridge piers and abutments is at the base of any scour vulnerability and risk assessment. 13 Studies over the past four decades have provided several methods for the estimation of scour depth (see, e.g. Pizarro et al. 14 for a state-of-the-art review), which include empirical formulas fitted to experimental data,3,15 theoretically based formula 16 and numerical approaches involving, for example, artificial neural networks.17,18 However, most of these approaches (e.g. especially the empirical model based on lab experiments) follow the assumption that the designed flood acts over an infinite duration, 14 while real flood events are characterised by hydrographs of different duration and magnitude, resulting in non-stationary hydraulic conditions that influence the scour evolution.19,20 Moreover, the risk of failure due to scour cannot be directly related to only one designed flood scenario. 21 Hence, comparisons between scour estimates according to the mentioned methods and actual scour depths observed on site have shown that the first may be significantly biased on the conservative side. 22 This could be explained by the extreme complexity of the scour evaluation, which involves many aleatoric and epistemic uncertainties. 23 Probabilistic frameworks have been presented over the years to incorporate the effect of these uncertainties.22–25
In the UK, Network Rail (NR) and Transport Scotland (TS) assess the risks associated with scour on road and railway bridges using the Procedures BD97/12 26 and EX2502, 27 respectively. Both these procedures rely on visual inspections, carried out at regular intervals or after major flood events, to identify the bridges that may be at risk of scour. More detailed assessments are then carried out for these bridges, and the scour depth is estimated through empirical formulas in order to produce a scour-vulnerability index (i.e. expressed as the ratio between the total scour depth at the base of the pier DT and the foundation depth DF) used to rate the bridge assets and prioritise scour risk mitigation interventions. The risk assessment is, therefore, based on an essentially deterministic approach, with a prefixed flood scenario (e.g. the 1 in 200 years flood).
Although visual inspections are a predominant non-destructive evaluation technique to check the state of any bridge component, they have clear disadvantages in the context of scour risk assessment. Their reliability depends on the inspector’s experience and on the equipment provided, and above all they are, in general, expensive and time-consuming. Furthermore, it is too dangerous to carry out underwater visual inspections during the peak of a flood event, when the risk of scour is the highest.
Nowadays, a wide range of sensor and communication technologies offer the possibility to assess in real time the scour depth at bridge foundations. 28 This could help to overcome the limitations of visual inspections, by increasing the identification of the bridges most at risk of scour. However, monitoring an entire infrastructure network is not economically sustainable, and for this reason, scour sensors may be installed only at a few critical bridges.
Hence, for these reasons, current scour risk assessment approaches could be improved by (1) explicitly considering the various sources of uncertainty that affect the problem, thus enabling the shift from a deterministic to a probabilistic evaluation of the scour depth and (2) incorporating the observations from scour sensors, allowing the reduction of the uncertainty in the scour risk estimates.
This article illustrates a probabilistic framework for the assessment of the scour hazard of bridges in a network, which is capable to use the data from scour monitoring systems installed only at critical bridge locations to improve the scour assessment for unmonitored locations within the same bridge network. In particular, the proposed framework is based on a Bayesian network (BN), which describes the conditional dependencies among the random variables (RVs) involved in the scour depth assessment at different bridges. Once a new observation on the scour depth or the flow discharge is available at a location, the BN is exploited to estimate and update the scour depth at unmonitored locations. It is noteworthy that a preliminary development of the BN for scour estimation was presented in Maroni et al. 29 In that article, a highly simplified BN was considered to test and compare the effectiveness of two different numerical algorithms for the Bayesian updating, namely, an algorithm to solve linear Gaussian BNs and the transitional Markov chain Monte Carlo (TMCMC) method. This article describes an extended version of this BN, integrating improved scour estimation models and better-defined sources of inherent uncertainty. To the authors’ knowledge, it constitutes the first application of BNs to bridge scour risk management.
The rest of the article is organised as follows: Section ‘Bayesian statistical inference and model updating’ outlines the principal concepts of the Bayesian logic and BN. Section ‘BN for scour estimation’ illustrates the developed BN, the involved RVs and the models employed to describe their conditional dependency. The section also explains how the BN is fed with observations from various monitoring systems and how this new information updates the variables of the network. Section ‘Numerical algorithm for model updating’ briefly describes the numerical algorithm employed to solve the BN and update the variables involved in the scour estimation. In section ‘Case study’, we present and describe the case study used to demonstrate the functioning of the BN, consisting of bridges managed by TS in South-West Scotland. These bridges cross the same river and scour depths are assumed to be monitored only in one of them. The outcomes of the application of the proposed framework to the case study are shown in section ‘Results’. The article ends with conclusions and future works in section ‘Conclusion’.
Bayesian statistical inference and model updating
The last three decades have seen a growing trend towards the development of sensor technologies and techniques for processing the data and assess the performance of civil infrastructure under environmental conditions. Bayesian inference provides a general, rational and robust approach for evaluating the structure condition (e.g. damaged or undamaged) or judge sensor and model performances, by taking into account all the sources of uncertainty relevant to the problem. Usually, information about a monitored structure might come from different sources, such as observations collected by sensors, design documentation of the structure, inspections and test reports or engineering judgement. 30 The inverse problem of estimation of the parameters of a model is tackled by treating them as uncertain and using available data to update their probabilistic distribution. Hence, this approach constitutes an accumulation of knowledge. 31
Equation (1) illustrates the expression of the Bayes’ theorem for the problem of updating of state variables distribution

where the probability p(state) is called prior probability and represents the perspective of the state prior to the collection of data. The probability p(data|state) is called likelihood of the observed data. Analogously, p(state|data) is called the posterior probability of the state because it is the updated belief after new information is gained through observed data. The dominator p(data) is a normalising factor called evidence, which must be calculated by integrating over the parameter space through application of the total probability theorem.
Bayesian methods have received increased attention across a number of disciplines in recent years; in particular, they have been successfully implemented in structural health monitoring (SHM) problems.32–34 Consequently, there has been an increased interest in the use of graphical models, such as BNs, to enable Bayesian model updating in complex and large-scale problems.
Bayesian network
A BN, developed by Judea Pearl in 1985, is a graphical model using a directed acyclic graph to represent a set of RVs and their conditional dependencies. 35 Each RV, which can be discrete or continuous, is depicted by a node and the probabilistic dependency between two variables is represented by a link (Figure 1).
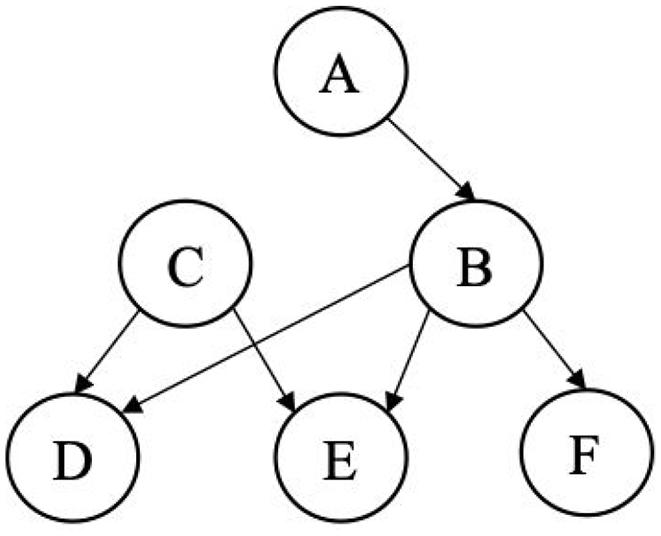
An example of a Bayesian network.
In BN terminology, it is unequivocal to refer to specific nodes as parent or child, since a directed acyclic graph represents a hierarchical arrangement. Any node extending from another one is denoted as a child, while the inverse relationship defines a parent node. Nodes without parents are known as root nodes and are described by their probability density function (pdf), which, in Bayesian terms, can be understood as their pdf.
Two forms of probabilistic inference can be carried out in BNs: predictive analysis that is based on evidence (i.e. information that the node is in a particular state) on root nodes, and diagnostic analysis, also called Bayesian learning, where observations enter into the BN through the child nodes. 36 The child node pdfs can be estimated from the roots’ pdfs by performing predictive analysis, whereas Bayesian learning allows updating root node pdfs when new information enters into the BN through a child node. When evidence enter into the BN, the piece of information is spread inside the network to update variable’s probabilities through one of the two forms of inference mentioned above. In particular, the second approach, the Bayesian learning, is attractive when the analysed system is based on constantly evolving information, as in the case of a real-time monitoring system. Furthermore, BNs are well suited for representing knowledge under uncertainty. Uncertainties from variables, measurements and model itself can be implemented into the BN such as components of the model or even as an updatable node.
In recent years, there has been an increasing amount of literature on the use of BNs. Although BNs were first implemented in the context of the artificial intelligence community, 37 they have become quickly popular in every field of study, thanks to their excellent performance and suitability for dealing with a broad range of problems that involve probabilistic reasoning and uncertainty quantification. BNs started to be used for Bayesian modelling in engineering risk analysis due to their ability to manage many dependent RVs. One of the earliest works dealing with risk assessment through the use of BNs was carried out by Friis-Hansen. 38 After that, several works on the employment of BN for risk assessment have been proposed starting from the article by Faber et al., 39 where BNs were utilised for assessing the risk related to the decommissioning of offshore facilities. Following examples have been focused on the natural hazard risk assessment,40–42 damage detection,43–46 optimal sensor placement 47 and structural deterioration due to metal corrosion and fatigue using an extended version of BN that include time-variant parameters (i.e. dynamic BNs).48,49 Dynamic BNs have been recently used to assess the time-dependent resilience of engineering systems. 50 The applications in seismic risk are many (see, for instance, Bensi et al. 51 ) and they address different topics such as the reliability analysis of critical infrastructures in the aftermath of a hazardous event,52,53 bridge asset 54 and road network 55 management or post-earthquake risk assessment including a decision making process. 56 BNs have been also used to evaluate multi-hazard risk.57–60
BN for scour estimation
This section illustrates the probabilistic framework used to update the scour depths at any location of a bridge network given the data from sensors monitoring scour only at critical locations. The rationale of this framework is as follows: a scour monitoring system measures the scour depth at the pier of one bridge, and the piece of information is then extended to the other piers and the unmonitored bridges by exploiting the conditional dependence between the scour depths at different locations, as described by a BN.
The developed BN is based on BD 97/12, 26 which is the procedure followed by TS to assess the scour risk of their road bridges. This procedure can be divided into four steps: (1) assessment of the flow hydraulic properties, (2) estimation of the constriction scour, (3) estimation of local scour and (4) estimation of total scour. In particular, starting from the river flow characteristics (such as river flow Q), different models are applied to estimate the depth of flow upstream of the bridge yU, and the two components of scour, constriction scour (DC) and local scour (DL), whose sum is equal to the total scour depth DT. For the purpose of developing the BN, model uncertainties are added to each model to describe the randomness of the estimation processes. Thus, each formula is structured in the following way

where the model fx estimates the variable x through the dependent variables y1, …, yN, and ex and (j)ex are the two model uncertainties: the first one represents the random error of the equation and the second one is an additional error that is associated with the specific jth location (e.g. pier or bridge). Every RV representing model uncertainty is set to be a root node of the BN and thus is described by assigning to it a prior pdf. These pdfs are expressed as normal distributions with zero mean and a standard deviation (SD). The RVs (j)ex are assumed to be independent and identically distributed for the different piers. Figure 2 illustrates the BN for the problem of scour assessment at a single bridge pier. The models employed in the four steps of the assessment procedures are described more in detail in the following subsections.
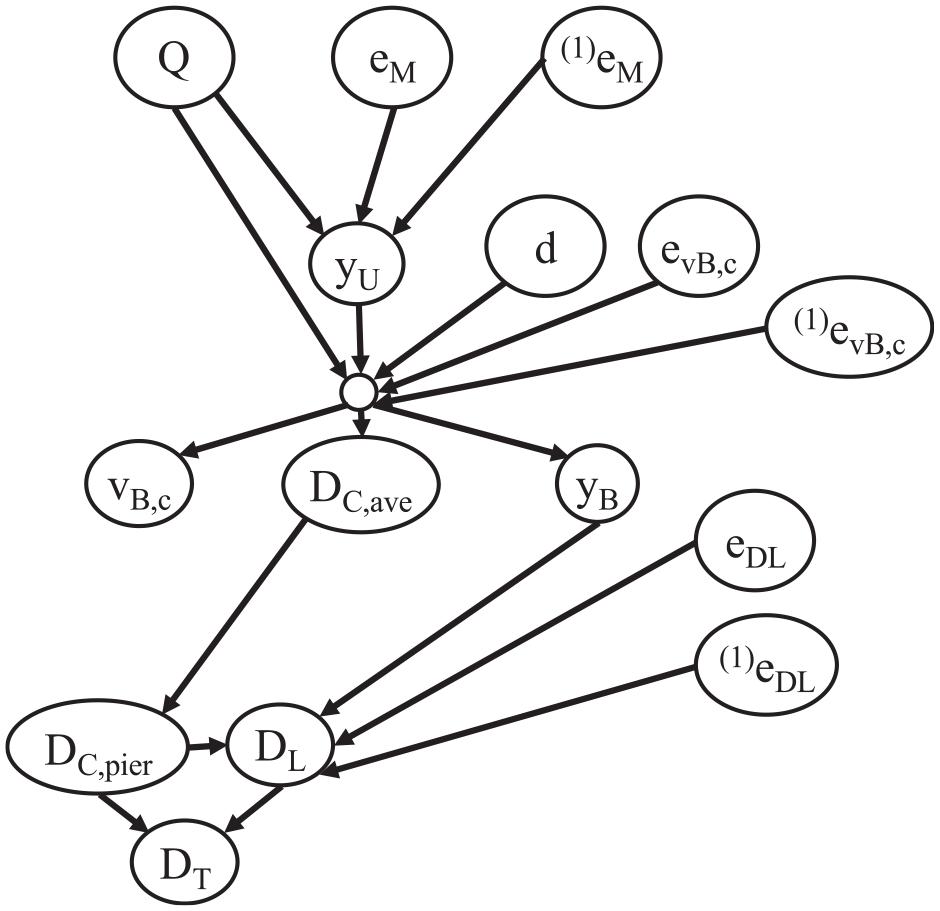
BN for scour estimation at a single bridge location.
Flow analysis
Manning equation is used to describe the relationship between Q and yU

where n is the Manning coefficient, BB is the channel width at bridge opening and s is the channel slope. Two model uncertainties are employed: eM is the correlated model error of the Manning equation and (j)eM is the uncorrelated model error in the jth bridge. The SD of each error is chosen equal to 0.10 in order to define a total SD corresponding to 0.15.
Constriction scour
The reduction of channel width due to the presence of bridge piers or abutments leads to an increase in the water velocity vB. When the velocity reaches the critical value vB,c (i.e. threshold velocity below which scour does not occur), the erosion of the riverbed starts.
The equilibrium (i.e. the final scour hole) is reached when the increase in cross-sectional area of flow for constriction scour is such that vB < vB,c.
A nonlinear system of three equations in three variables is developed to estimate the constriction scour depth. Q, yU and the bed material grain size d are the input parameters of the system that enable us to evaluate the average constriction scour DC,ave, the water level through the bridge yB and the threshold velocity vB,c. The nonlinear system consists of the Colebrook–White equation (equation (4a)), 1 the conservation of fluid mass (equation (4b)) and the Bernoulli equation (equation (4c))
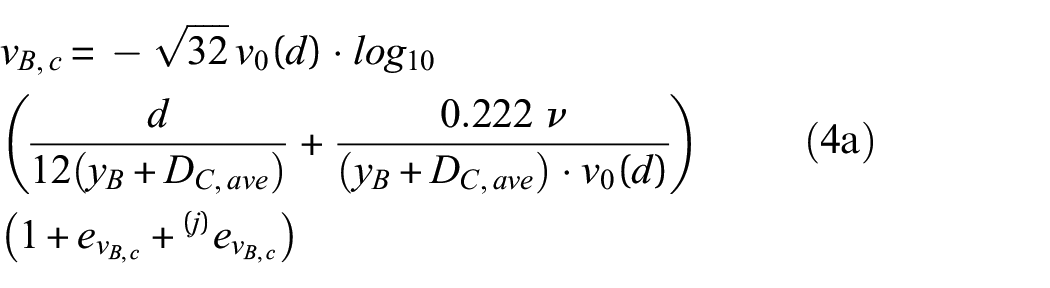


where ν is the kinematic viscosity of water and v0(d) is the shear velocity at the threshold of movement.
1
The last two equations are considered deterministic; therefore, the model errors are added to the Colebrook–White equation alone: the correlated,
The previous step of the BN provides the average value of the constriction scour DC,ave; this value is then multiplied by a factor FS to obtain the constriction scour depth along the channel width. Table 1 provides the values of FS according to the shape of the river and Figure 3 shows the two scenarios described in the table.
Constriction scour distribution factor FS. 26

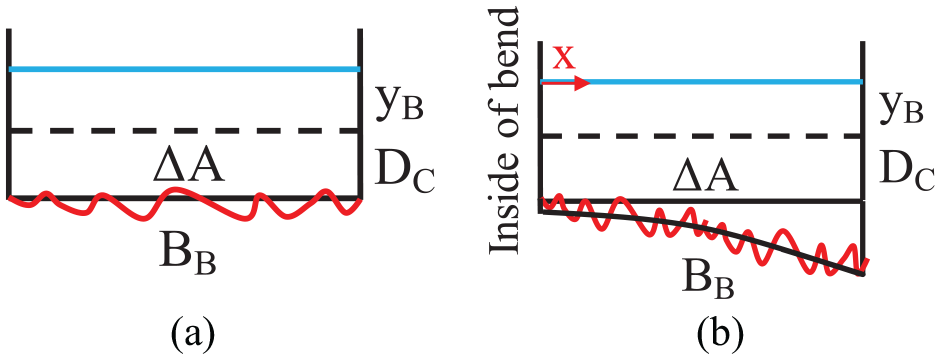
Constriction scour depth profile in a straight (a) and bended (b) reach.
In order to include all the cases of Table 1, we define the constriction scour depth at the pier DC,pier or, generally, the constriction scour at every location of the river as

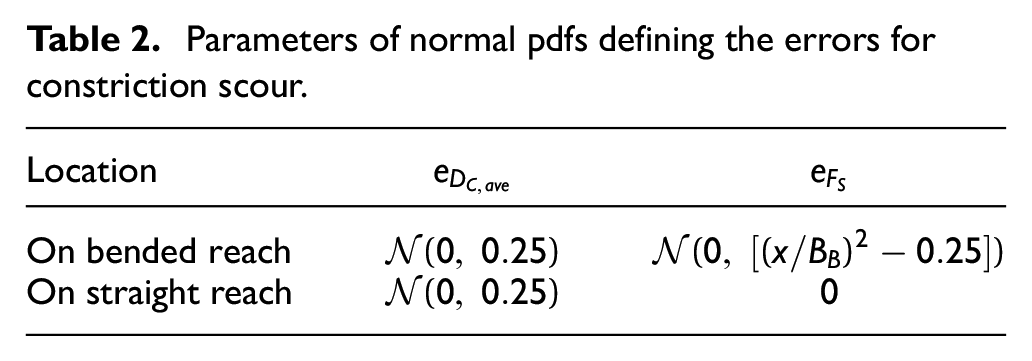
To be consistent with the structure of equation (2), two types of errors can be modelled for including the multiplication factor FS in the estimation of DC across the channel width. The two errors are again expressed as a normal pdf with zero mean and an SD. According to Table 1, we define
Parameters of normal pdfs defining the errors for constriction scour.
Local scour
The formation of vortices at pier base is the principal mechanism causing the local scour, 61 and the pier width WP is the primary controlling parameter, which is corrected by some factors depending on its shape, its inclination with respect to the river flow and the local water level.
The expression of the local scour depth according to Highway Agency 26 is

where fPS is the shape factor, fPA is the pier alignment factor and fy is the flood depth factor. Two model uncertainties are again added: the correlated one,
Total scour
The depth of total scour DT is simply the sum of the two components, constriction scour depth DC and local scour depth DL. This expression is assumed as deterministic; consequently, no model uncertainties are added

It is noteworthy that, in general, the scour depth at a bridge location is also affected by the natural evolution of the riverbed. This contribution, denoted to as degradation scour, is not considered in the BD 97/12, 26 and for this reason, it is not explicitly modelled in the BN. However, the observations used to update the variables of the BN should reflect this component.
Bayesian learning
With reference to the presented BN, it is assumed that three quantities can be monitored, that is, the river level upstream of the bridge yU, the total scour depth DT, and the constriction scour
The solution of the BN can be broken down into three steps:
Defining the prior pdf of the root nodes (grey nodes in Figure 4(a)): water flow Q, grain size d, the correlated model uncertainties eM,
Splitting the BN into three sub-networks to have three different updating processes: yU updates eM;
Updating the descendant nodes (light yellow nodes in Figure 4(c)).
The BN can be extended to a second bridge with N piers because the scour estimation is based on the same models. For instance, Figure 5 shows a BN for scour estimation at two bridges, each of them with N piers. The estimation of the scour depth at the second bridge is based on the models corrected by the model uncertainty updated by direct observations of
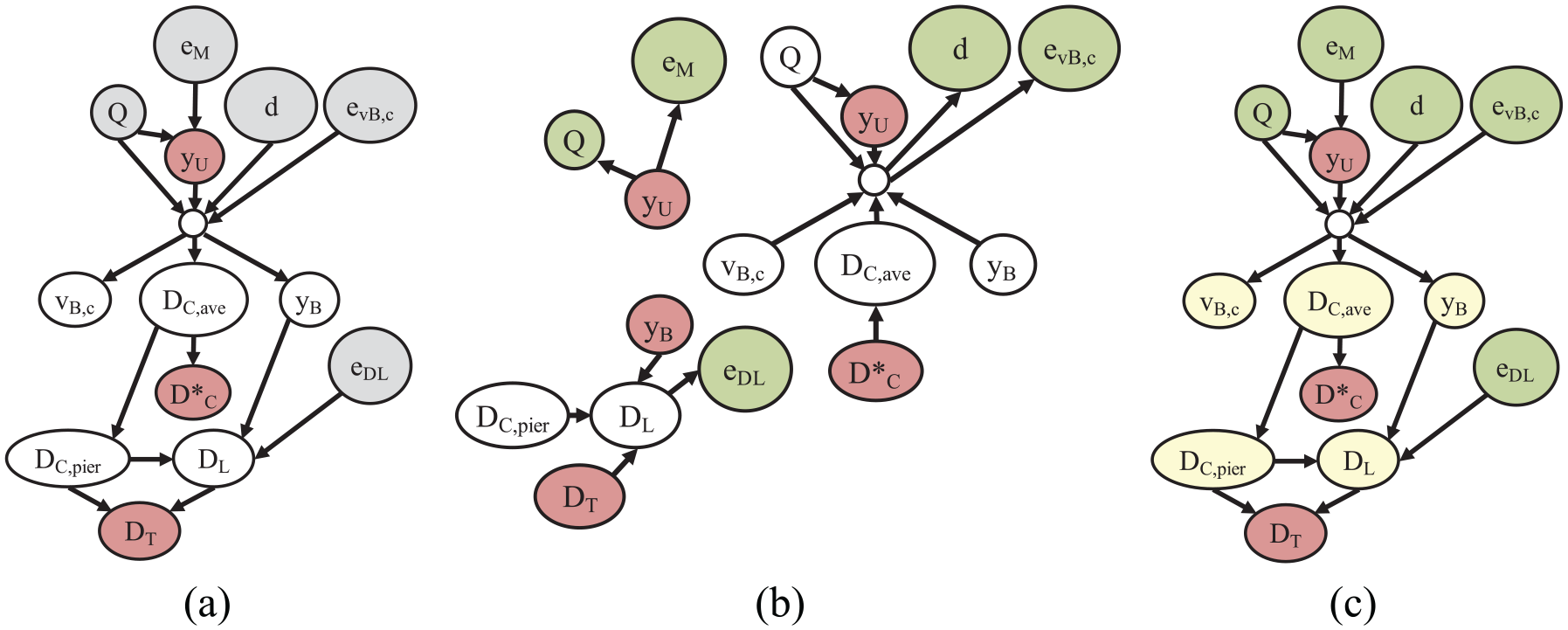
(a) Starting with prior pdfs, (b) updating of root nodes and (c) descendant nodes.
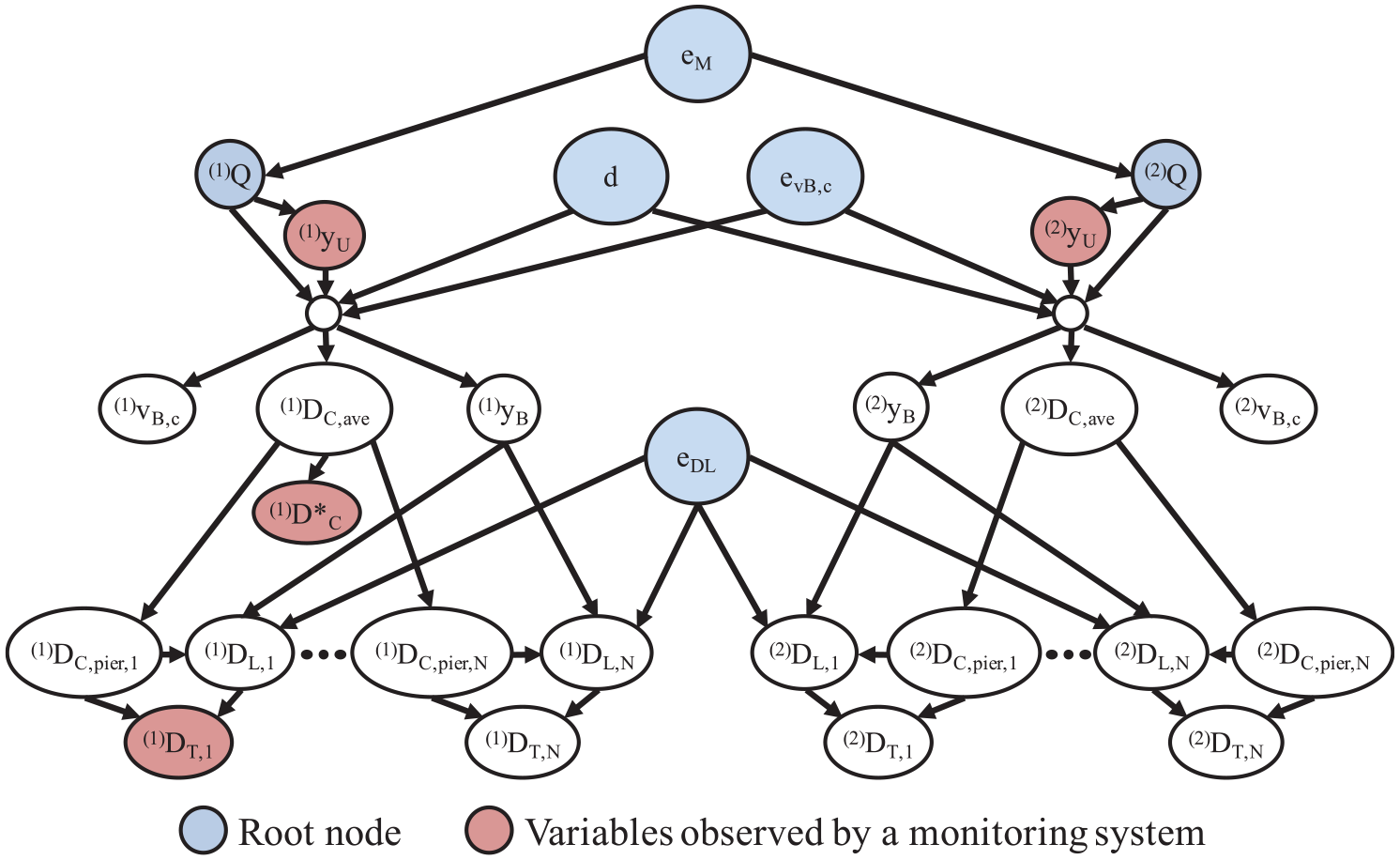
BN for scour estimation at two bridges on the same river, both with N piers.
It is worth mentioning that the above BN can be also used to perform predictive analysis, that is, the first type of inference described in section ‘BN’. As its name suggests, this analysis allows predicting the pdfs of the child nodes by starting from the prior pdfs of the parent nodes, without any observations entering the BN.
Finally, it is noteworthy that the BN could also be extended to incorporate other sources of information, such as direct river velocity measurements or forecast flood hydrographs. For this purpose, suitable hydraulic and hydrological models must be added to relate the various parameters.
Numerical algorithm for model updating
Despite the numerous advantages associated with Bayesian inference, its practical implementation involves some challenges, especially when continuous RVs are employed, as in the case of data collected by a monitoring system. A closed form solution of equation (1) is usually not available, and thus it is necessary to resort to numerical algorithms to calculate the posterior distribution’s parameters (e.g. mean value vector and covariance matrix). Given this, equation (1) can be rewritten as

The class of algorithms belonging to the Markov chain Monte Carlo (MCMC) methods 66 is a common choice when Bayesian inference must be carried on. These methods are a broad family of numerical algorithms that generate next sample values by performing a random sampling from the previous sample values. Their essential idea is using randomness to solve problems that might be deterministic in principle. Examples of these sampling methods are Monte Carlo, Metropolis–Hasting and TMCMC. These computer algorithms can be used to draw an (approximate) random sample from the posterior pdf, without having to completely evaluate it. The posterior pdf can be approximated to any accuracy level by taking a large number of samples.
The Metropolis–Hastings algorithm 67 is the most used and simple approach to make inference for Bayesian parameter estimation. It allows to extract samples from the actual posterior pdf. However, the method has some disadvantages: it does not calculate the evidence, the required number of samples N might be huge in some cases and it requires to always consider the burn-in period, that is, a period after which the samples are independent from the starting choice of the parameter to estimate. In order to overcome the issues above, the TMCMC method 68 has been proposed. In the TMCMC method, an iterative approach is used to generate samples from the unknown posterior distribution by changing the proposal pdf at each step until the target distribution is reached. Thus, n intermediate distributions pj are considered

where the index j denotes the step number. The likelihood function is scaled down by an exponent βj, with 0 = β0 < … < βj < … < βn = 1. It is worth noting that this construction does not alter the Bayesian logic: the series of intermediate distributions starts from the prior pdf (i.e. p0 = p(state)) and ends with the posterior (i.e. pn = p(state|data)). The algorithm starts at the step j by generating samples from the prior pdfs using a Monte Carlo simulation. Then, at the step j + 1, Markov chains with the Metropolis–Hasting algorithm are used to generate the pj+1 distribution, by choosing selected samples taken from the pj distribution according to ‘plausibility weights’. Before advancing to the next step, βj is updated. The algorithm stops when βj is equal to 1.
The TMCMC method is particularly convenient for dealing with complex joint pdfs (e.g. multimodal distributions) and does not require defining any proposal distribution or removing samples in the burn-in period. In Ching and Wang, 69 a comparison is made between the TMCMC and the Metropolis–Hastings algorithm, and the advantages of the former are highlighted.
Case study
The functioning of the developed BN is demonstrated using a small bridge network, consisting of bridges managed by TS in South-West Scotland (Figure 6). The bridges cross the same river (River Nith) and only Bridge 1 is instrumented with a scour monitoring system. The aim is to exploit the observations on Bridge 1 to update the pdf of the total scour depth at other bridge locations.
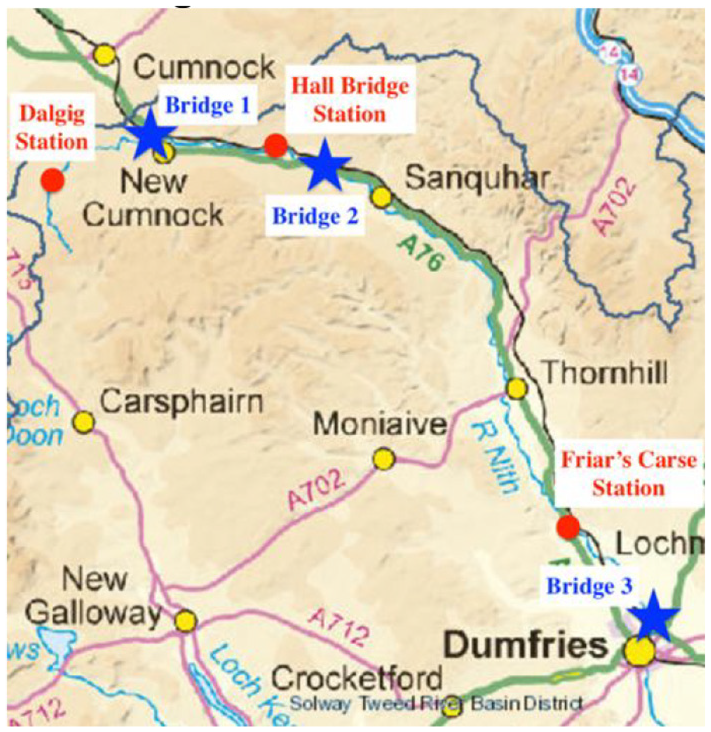
Three bridges over the River Nith. Red circles represent SEPA’s gauging stations.
Three bridges with significant scour events in the past are chosen from the TS scour database:
Bridge 1: A76 200 Nith Bridge in New Cumnock (Figure 7). It is a three-span (9.1, 10.7 and 9.1 m) stone-masonry arch bridge, with two piers in the riverbed. Both the abutments and the piers are founded on spread footings on the natural riverbed. In October 2018, a dielectric scour probe was installed on the upstream side of Pier 1 in order to measure the total scour at this pier. Moreover, another probe was installed in the centre of the channel immediately upstream of the Nith Bridge, in order to obtain a measurement of the degradation and constriction scour. The development and deployment of the scour probes are described in Maroni et al. 65
Bridge 2: A76 120 Guildhall Bridge in Kirkconnel (Figure 8). It is a three-span (8.8, 11.3 and 11.3 m) masonry arch bridge, with one pier in the riverbed. Both the abutments and the piers are founded on spread footings on natural ground, except one abutment’s spread footing that is founded on rock.
Bridge 3: A75 300 Dalscone Bridge in Dumfries (Figure 9). It is a seven-span (spans of 35 m and two of 28 m) steel–concrete composite bridge, with one pier in the riverbed. The abutments are founded on pile foundations on made up ground, while the piers are founded on pile foundations on natural ground.
The final BN for the estimation of the total scour at every bridge pier is depicted in Figure 10. The sub-networks corresponding to the three bridges are identifiable; correlated errors and the bed material grain size are root nodes in common for all bridges. The river flow Q is not a common root node because the three bridges are far apart and numerous tributaries of River Nith extend from Bridge 1 to Bridge 3. A hydrological model may be employed to correlate the river flows Q among the three sub-networks, but this is out of the scope of the article. Furthermore, there is a gauge station measuring the flow before each bridge; therefore, upstream water flow data are available for each of the bridges.
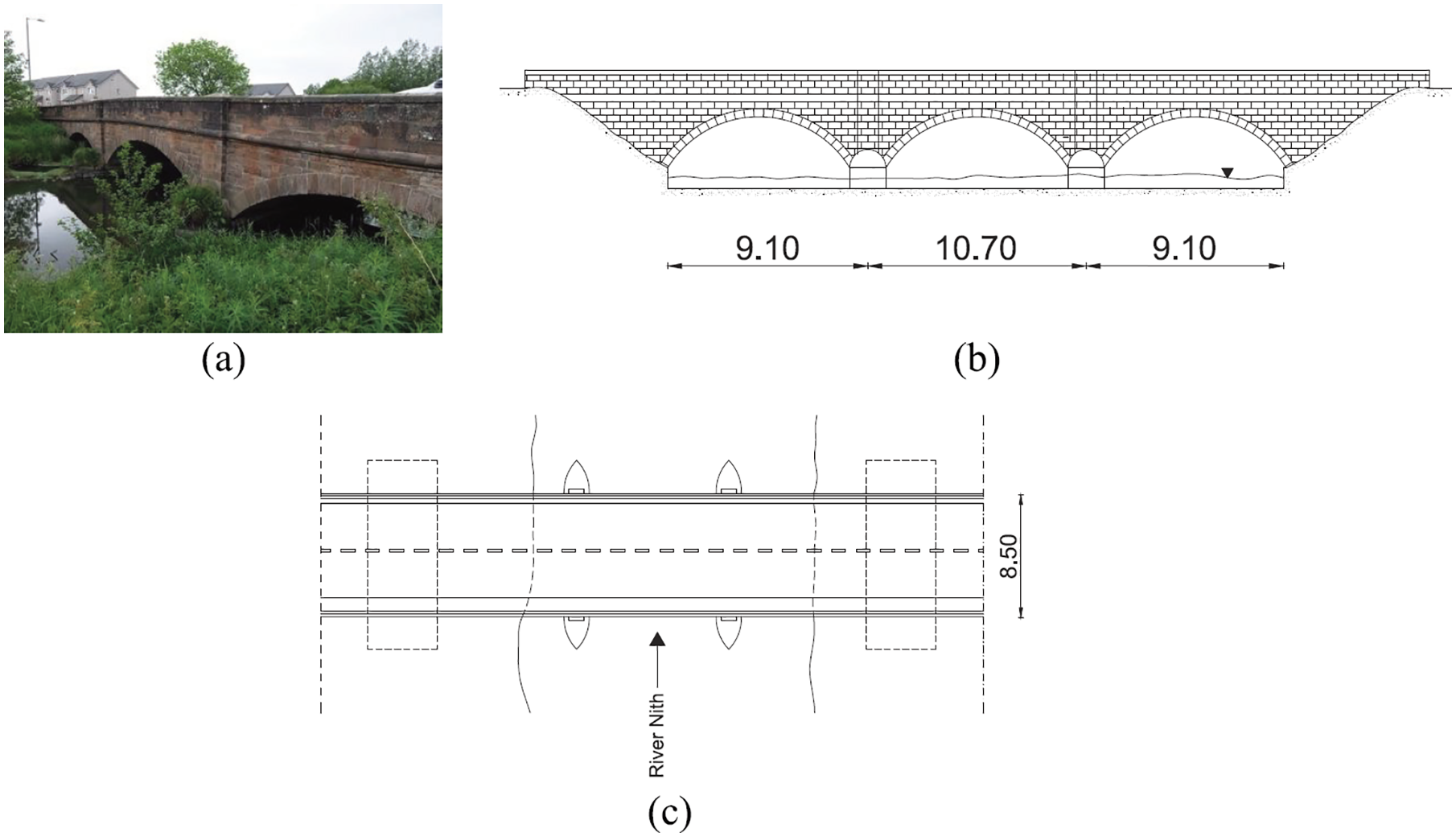
(a) A76 200 Nith Bridge, (b) bridge elevation and (c) plan view.
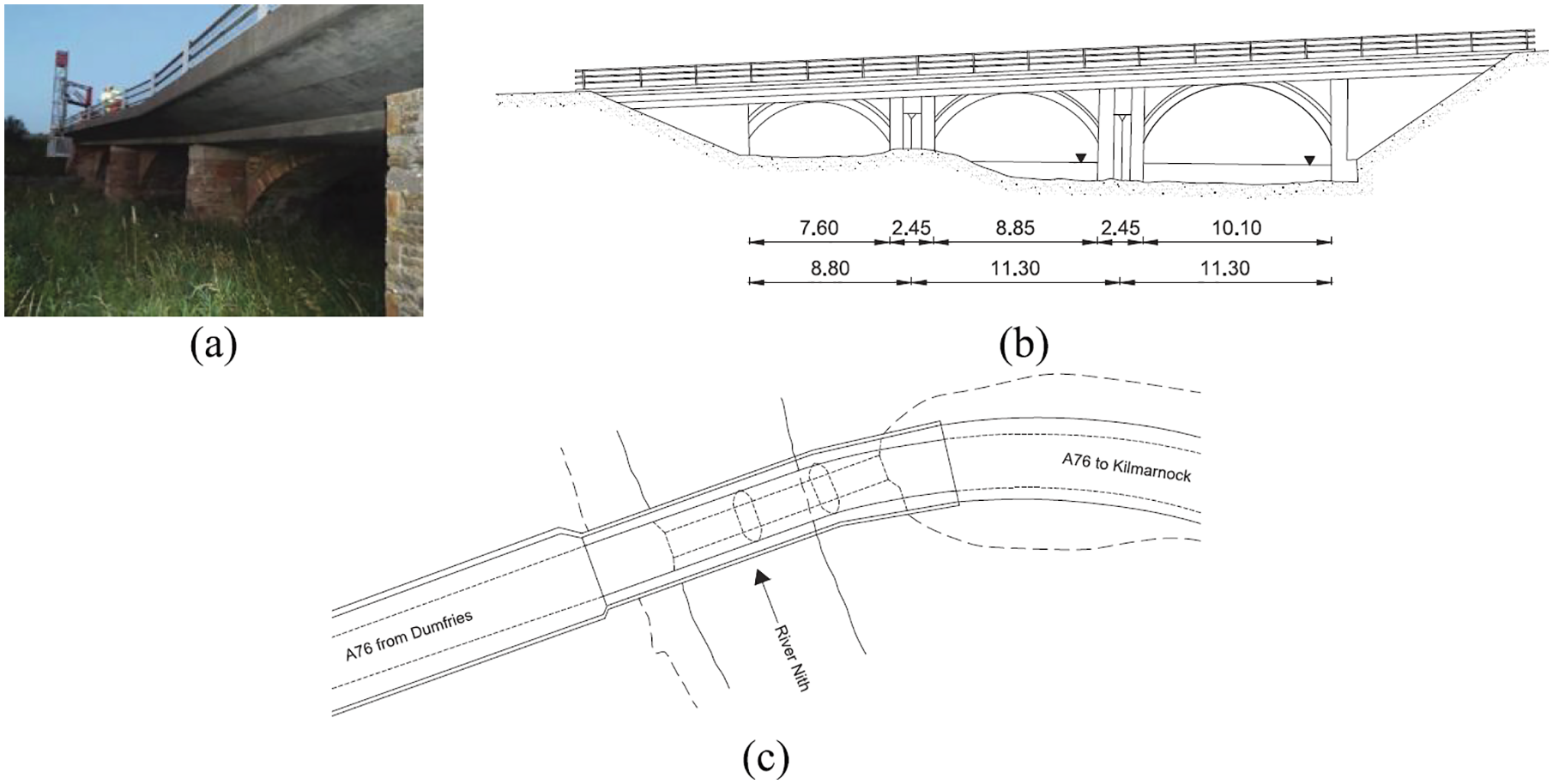
(a) A76 120 Guildhall Bridge, (b) bridge elevation and (c) plan view.
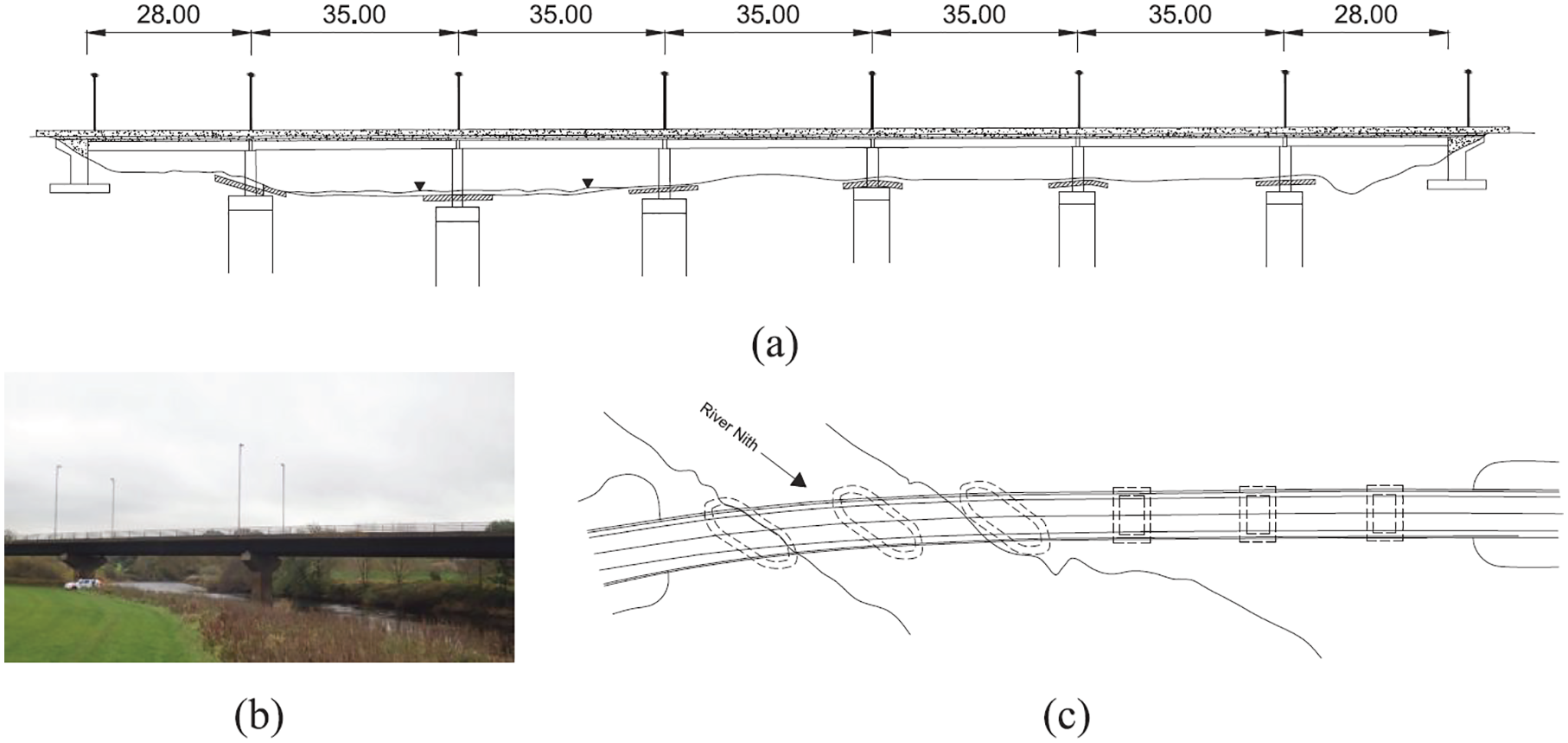
(a) Bridge elevation, (b) A75 300 Dalscone Bridge and (c) plan view.
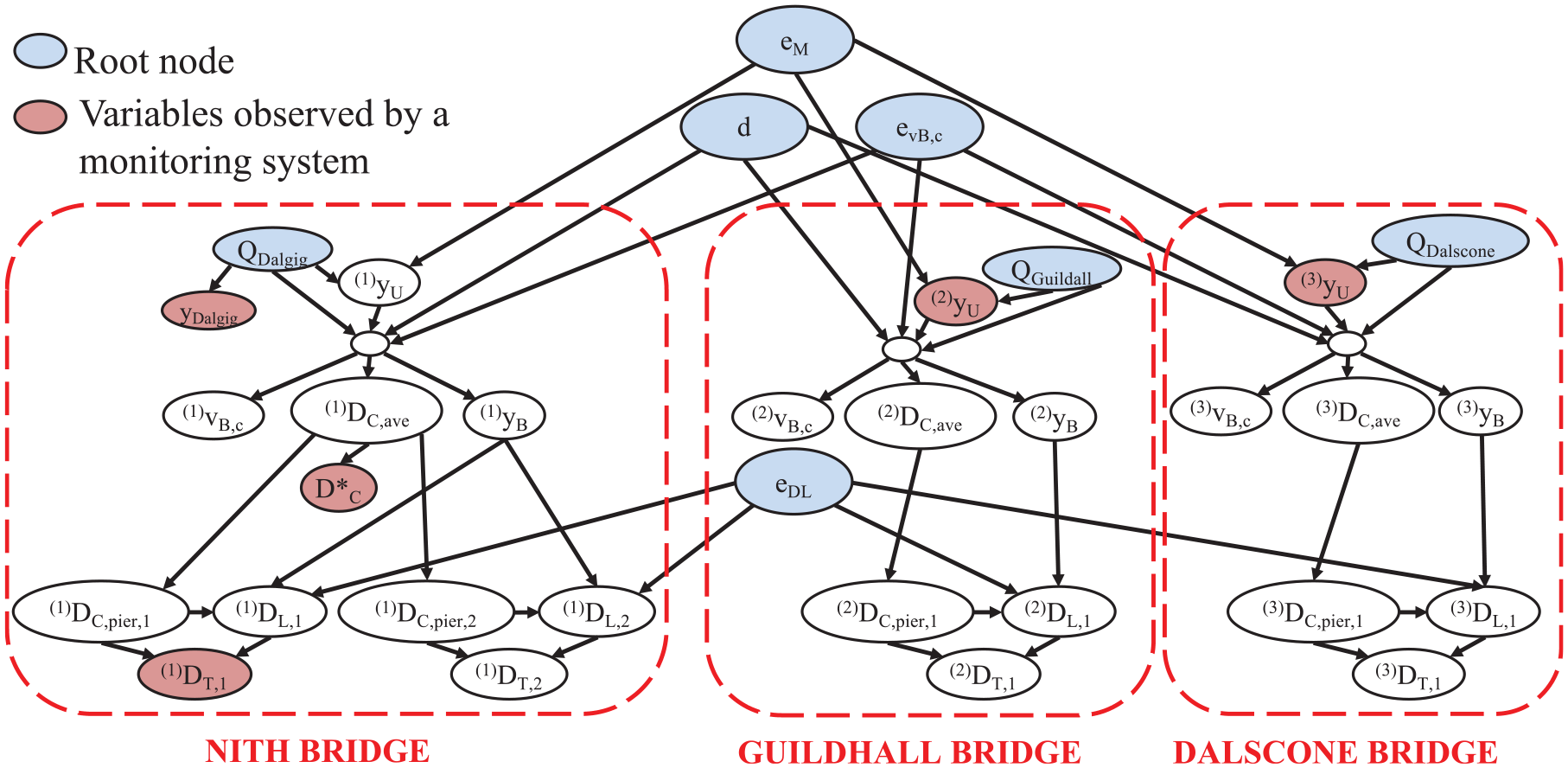
BN developed for the case study.
Results
Normal pdfs are employed for every variable except for river flows, which are described by a log-normal pdf because the discharge cannot be negative. The parameters of the log-normal pdfs (i.e. mean and SD of logarithmic values) are based on the gauging station data of the last 10 years collected by the Scottish Environmental Protection Agency (SEPA). They are shown in Table 3, while Figure 11 depicts the pdfs fitting the data. The prior pdfs of the model errors are set as normal distributions with zero mean and SDs defined previously.
Parameters defining the prior pdf of the flow discharge Q based on SEPA’s data.
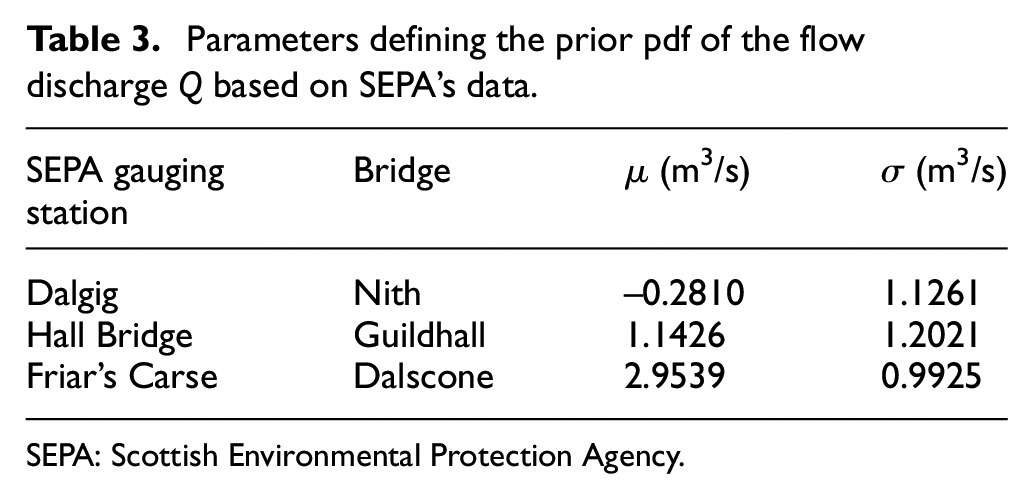
SEPA: Scottish Environmental Protection Agency.
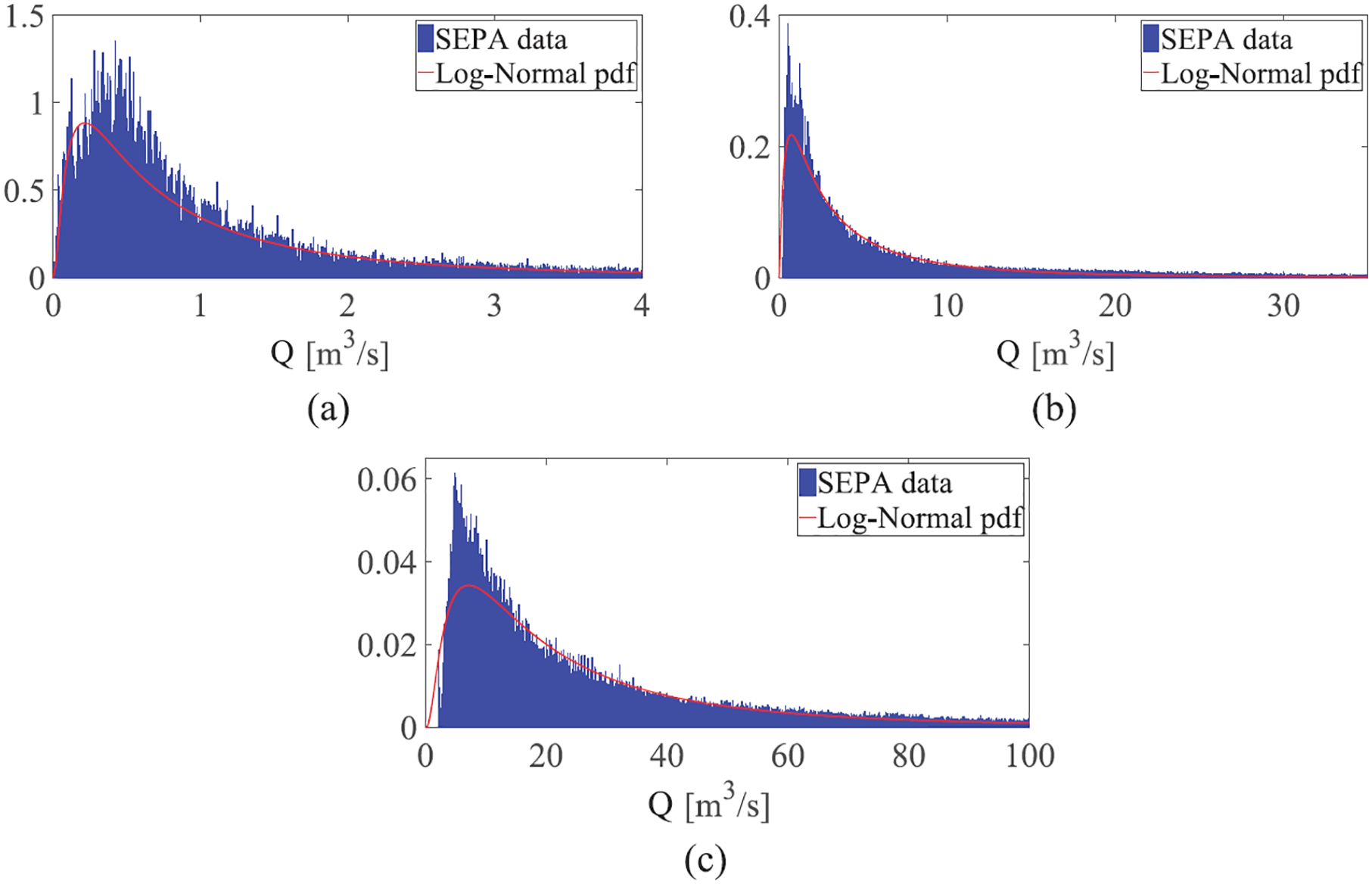
Prior log-normal pdfs of the river flow at (a) Dalgig, (b) Hall Bridge and (c) Friar’s Carse gauging station.
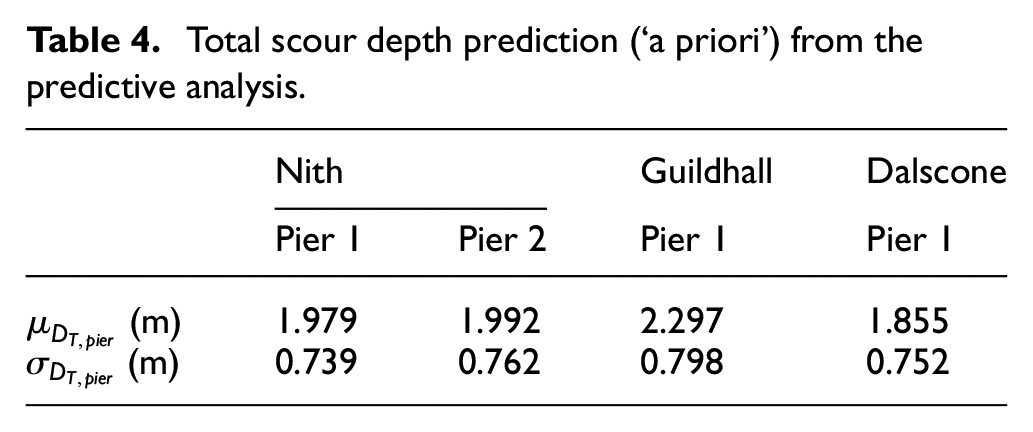
The predictive analysis is carried out by running a Monte Carlo simulation. This type of analysis requires only the parent nodes’ prior pdf and no observations enters into the BN to make a prediction of the distribution of the child nodes. A total of 10,000 samples of the root nodes pdfs is considered to estimate the prior pdf of the total scour depth DT,pier at each pier. The mean value,
Total scour depth prediction (‘a priori’) from the predictive analysis.
Although the scour probes installed in the A76 200 bridge provide continuous real-time scour data since 4 October 2018, no major flood events have been recorded yet. Thus, the simulation of the inference problem in the BN considers a hypothetical flood scenario compatible with the historical record of floods for the River Nith. In particular, the Bayesian learning is carried out by assuming that observations are available for the river levels yU upstream of three bridges, the degradation and contraction scour depth at the A76 200 bridge and the total scour depth at Pier 1 of the same bridge. Table 5 shows the water level values recorded at the gauging stations, simulating a flood event with return period of about 20 years. The scour data are assumed equal to 0.20 m for constriction scour depth
Case scenario for river level observations.
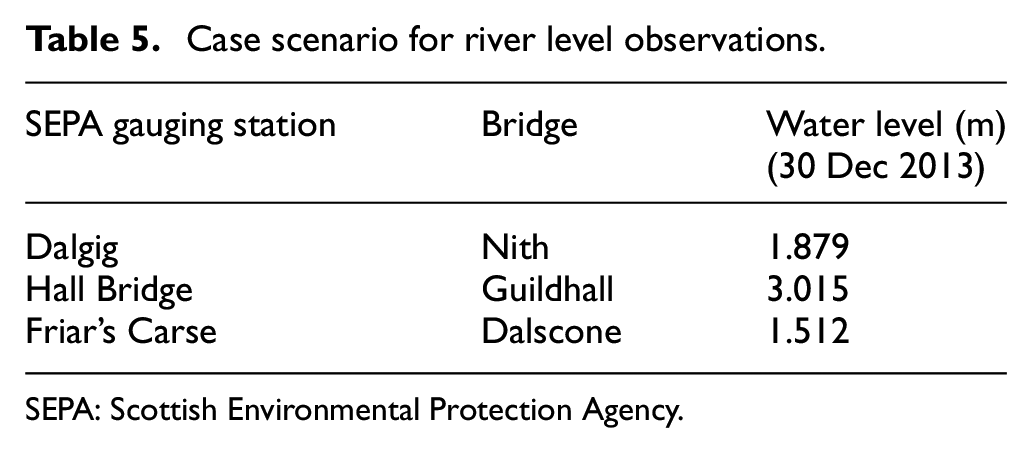
SEPA: Scottish Environmental Protection Agency.
The TMCMC algorithm
68
is then used to perform the Bayesian learning analysis and update the root nodes. Thousand samples are extracted at each stage of the TMCMC method, and this is repeated 100 times for each update to eliminate the influence of randomness. To solve the whole network, five updates have to be performed. Each update is connected to one observed variables (i.e. water flow upstream of each bridge, constriction scour depth
Figure 12 shows the comparison between the results of the total scour depth DT obtained ‘a priori’ with a Monte Carlo simulation (i.e. predictive analysis) and the estimations obtained after the Bayesian learning with the TMCMC method. With regards to A76 200 Bridge, the total scour depth at Pier 2 has a mean value equal to the one measured at Pier 1 (Figure 12(a)). This is indeed an expected result, since the piers belong to the same bridge, have the same geometry and the riverbed material and the water conditions are identical for them. However, it can be observed that while the value of the scour depth at Pier 1 is known deterministically (assuming that the measurement is affected by no uncertainty), the one at Pier 2 is uncertain, with an SD of 0.17 m. It is noteworthy that this value of SD is significantly lower than the one corresponding to the prior pdf (0.76 m). The decrease in dispersion, of about 80%, is the result of the added information and the high correlation existing between the scour depths at the two piers of the bridge. It can be observed in Figure 12(b) and (c) that the Bayesian learning also allows the updating of the estimates of the total scour depth DT at the piers of unmonitored bridges. In fact, the mean values of the total scour depth at these piers reduce significantly. Moreover, the SDs of the posterior distributions are close to 0.21 m, which constitutes a significant increase (more than 70%) in accuracy compared to the prior estimates.
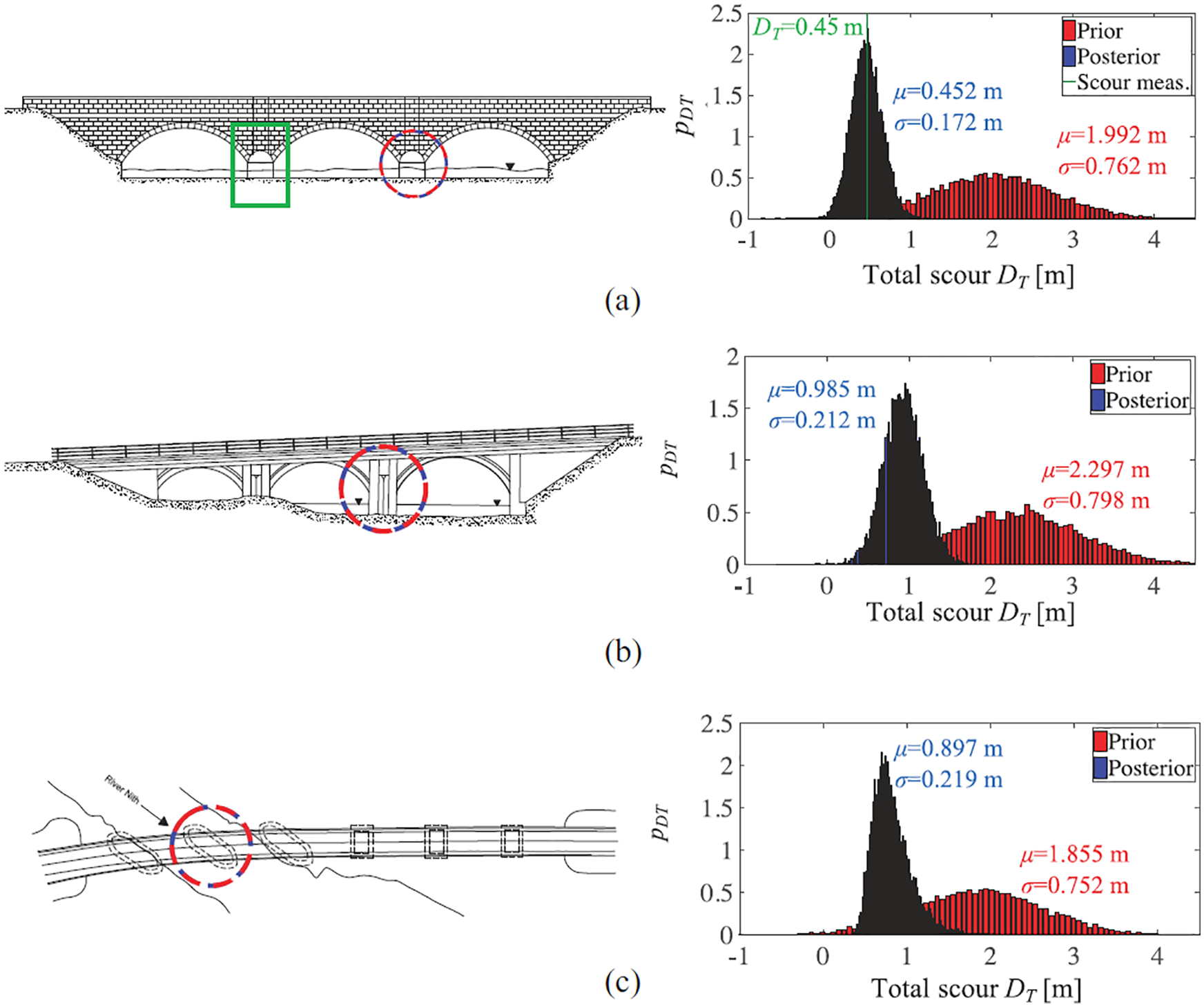
Comparison between prediction and estimation of total scour depths: (a) Pier 2 of Nith Bridge. (b) Pier 1 of Guildhall Bridge. (c) Pier 1 of Dalscone Bridge.
Conclusion
This article shows the development of a probabilistic framework for scour hazard assessment that uses limited data from monitoring systems to update the probability distribution of the scour depth at the foundations of bridges in a network. The proposed framework is based on a BN that describes the conditional dependencies between the scour depth at different piers within the same bridge or belonging to other bridges in the network. Once new observations on the river flow characteristics and/or scour data are available, Bayesian learning with the TMCMC algorithm is used to update the scour depth distribution at unmonitored locations.
A case study consisting of three bridges managed by TS in South-West Scotland is considered to demonstrate the functioning of the BN. The bridges cross the same river, and only one bridge (Bridge 1) is instrumented with a scour monitoring system. The aim is to exploit direct observations of total scour depth DT and the constriction scour
It is currently planned that the continuous real-time measurements of the scour depth at the monitored bridge locations of the Nith Bridge in New Cumnock will be fed into the developed BN to update in real time the estimates of the scour depth at other locations of the bridge network. Additional probes, installed at other locations, will be used to validate the proposed monitoring framework. Moreover, the outcomes of the presented framework will be used in a future study in combination with fragility curves to provide real-time estimates of the risk of bridge failure due to scour and inform a decision system, supporting transport agencies’ decision processes under extreme flood events. Future research will also consider the extension of the BN with structural models, allowing to incorporate also information from sensors mounted on the bridges, such as accelerometers or inclinometers.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This study has been carried out within the project titled ‘Early warning decision support system for the management of underwater scour risk for road and railway bridges’, which has received funding from the NERC ERIIP (Environmental Risk to Infrastructure Innovation Programme) under Grant Agreement No. NE/R009090/1.