
Abstract
A method to determine the influencing parameters of a structural and damage detection system is proposed based on the value of information analysis. The value of information analysis utilizes the Bayesian pre-posterior decision theory to quantify the value of damage detection system for the structural integrity management during service life. First, the influencing parameters of the structural system, such as deterioration type and rate are introduced for the performance of the prior probabilistic system model. Then the influencing parameters on the damage detection system performance, including number of sensors, sensor locations, measurement noise, and the Type-I error are investigated. The pre-posterior probabilistic model is computed utilizing the Bayes’ theorem to update the prior system model with the damage indication information. Finally, the value of damage detection system is quantified as the difference between the maximum utility obtained in pre-posterior and prior analysis based on the decision tree analysis, comprising structural probabilistic models, consequences, as well as benefit and costs analysis associated with and without monitoring. With the developed approach, a case study on a statically determinate Pratt truss bridge girder is carried out to validate the method. The analysis shows that the deterioration rate is the most sensitive parameter on the effect of relative value of information over the whole service life. Furthermore, it shows that more sensors do not necessarily lead to a higher relative value of information; only specific sensor locations near the highest utilized components lead to a high relative value of information; measurement noise and the Type-I error should be controlled and be as small as possible. An optimal sensor employment with highest relative value of information is found. Moreover, it is found that the proposed method can be a powerful tool to develop optimal service life maintenance strategies—before implementation—for similar bridges and to optimize the damage detection system settings and sensor configuration for minimum expected costs and risks.
Keywords
Introduction
It is well known that structural health monitoring (SHM) can be beneficial for structural performance assessment over time. 1 Substantial research has been devoted to the development of SHM strategies and measurement techniques to reduce the various uncertainties associated with structural characteristics and performances. SHM results have been utilized for structural reliability assessments in various fields of engineering,2–5 which comprise the utilization of monitoring data for reliability-based inspection planning, updating models, and the assessment of the monitoring uncertainty. However, only very recently, it is acknowledged that the benefits of SHM in a life-cycle perspective prior to its implementation can be properly quantified by using the value of information (VoI) theory. 6
Decision-makers, such as infrastructure owners and operators, are often bothered with questions7,8 like whether it is beneficial to perform an SHM experiment considering the economical aspect, and if so, when the SHM experiment should be implemented? How to design a monitoring and maintenance plan accordingly with different deterioration types and rates in different environment? How many sensors should be chosen? Where to install the sensors? When the benefit is not clearly specified, it is usually hard to convince the decision-makers to invest in SHM of large systems, since inappropriate SHM strategies may trigger unnecessary or inappropriate remedial activities, which may lead to a loss of economical and human resources. Most often, the value of SHM is only implicitly assumed. Decision-makers would like to utilize experience as a basis for identifying efficient strategies for performance monitoring without considering how the information shall be utilized for improving the decision basis for optimal life-cycle management of the structures.
To overcome this issue, there is a need to establish a better understanding of the quantification of the value of SHM before its implementation. Early approaches for the assessment of the value of SHM information have been developed from 2011 onwards.4,9–11 Further focused research efforts of many authors, also within the European Union–funded COST Action TU1402 (www.cost-tu1402.eu), resulted in comprehensive studies of many aspects for the quantification of the value of SHM.6,12–24 These aspects include the quantification of the value of deterioration monitoring18,25,26 and the quantification of the value of multiple SHM information.26,27
This article addresses the quantification of the value of damage detection system (DDS) information constituting an important part of the SHM research field. The quantification of the value of DDS information is parameterized to identify the optimal DDS configuration, the optimal DDS employment on a structural system, and the structural system characteristics for which DDS information provides the highest value. In this way, the authors aim at decision support for the employment of DDS by jointly analyzing the DDS system performance, the structural system performance and the associated benefits, costs, and consequences. The paper documents a 3-year research progress within the European Union–funded Marie Skłodowska–Curie Innovative Training Network project INFRASTAR (www.infrastar.eu) in conjunction with the findings of the COST Action TU1402. The novelty of this article encompasses:
A comprehensive and consistent formulation and elaboration of the Bayesian pre-posterior decision scenario model and its analysis.
A comprehensive and consistent analysis and parametric study of the value of DDS information in dependency of the DDS characteristics and structural system deterioration characteristics throughout the service life.
A detailed and comprehensive analysis of DDS characteristics.
This article starts with introducing the VoI theory in section “VoI theory.” Then the influencing parameters of the structural system such as deterioration type, deterioration rate, and deterioration initialing year for the performance of a prior probabilistic system model are discussed in section “Structural probabilistic system performance.” The DDS performance influencing parameters including number of sensors, sensor locations, measurement noise, and the Type-I error are presented in section “DDS information.” The integrity management actions are discussed in section “Integrity management actions.” The pre-posterior probabilistic model which is computed utilizing Bayes’ theorem to update the prior system model with the damage indication information is described in section “Pre-posterior updating with DDS information.” The utility modeling method is presented in section “Utility modelling and analysis.” With the developed approach, a case study on a statically determinate Pratt truss bridge girder is investigated to validate the method in section “Generic parametric analysis of the value of DDS information.” The results are discussed in section “Discussion.” This article ends with conclusion in section “Conclusion.”
Methodology
VoI theory
The VoI theory has been developed by Raiffa and Schlaifer. 28 The VoI analysis is rooted in the Bayesian definition of probability and utility-based decision theory to quantify the expected value of the utility increase related to yet unknown information.
The decision problems in the context of SHM for the life-cycle management of structures are illustrated in Figure 1. The essential decisions relate to whether implement SHM or not, when, at which locations and for which structural conditions to perform SHM. For different structures, different life-cycle phases may be considered in the decision analysis. For new structures, engineers need to think whether to integrate SHM into design or construction phases. While for existing structures, decisions about implementing SHM will be considered during the operation and maintenance phase and toward the end-of-service life. To figure out the decision of implementing SHM, further questions arise like: When should the SHM system been installed? Where to install the sensors? How many sensors to install? How to set measurement parameters? and Whether to extend service life? These questions can be answered with the utilization of the Bayesian decision and VoI analyses and an optimization of the expected benefits, the risk and the expected costs. By performing SHM, information about the states of the structural system are obtained, which will improve the state models. Actions such as repair and maintenance for example, based on the information acquired by SHM strategies like damage detection, change the physical properties and performance of the structural system. Both, the parameters of the SHM and the repair and maintenance strategies influence the expected benefits, costs, and the risk and in this way lead to different VoI.
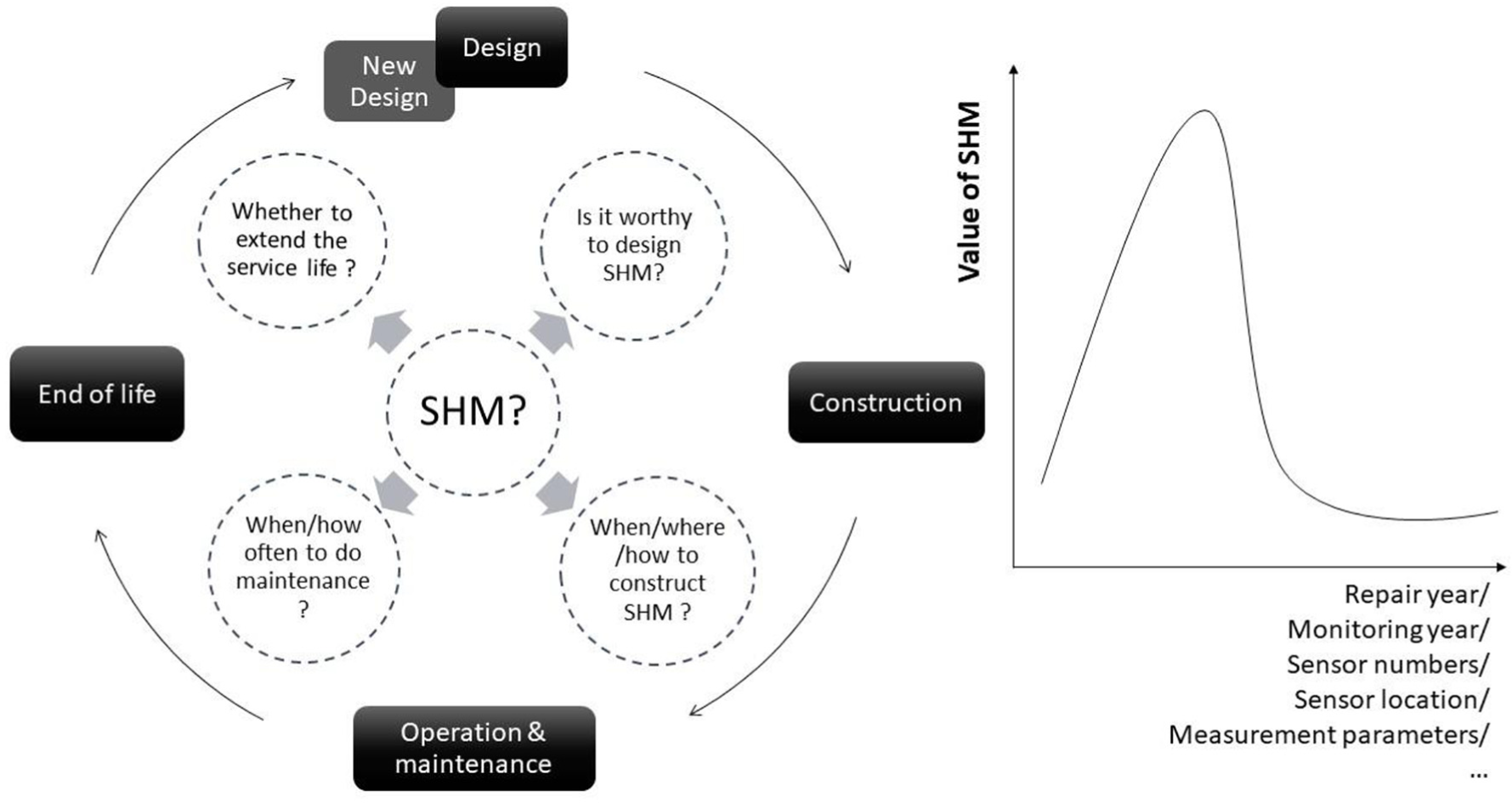
Decision problems in the context of SHM through life-cycle management of structures.
The classic format of a decision analysis relating to experiments—or SHM—is shown in Figure 2, building upon the framework of Bayesian decision theory.
28
The decision-maker wishes to select a single action
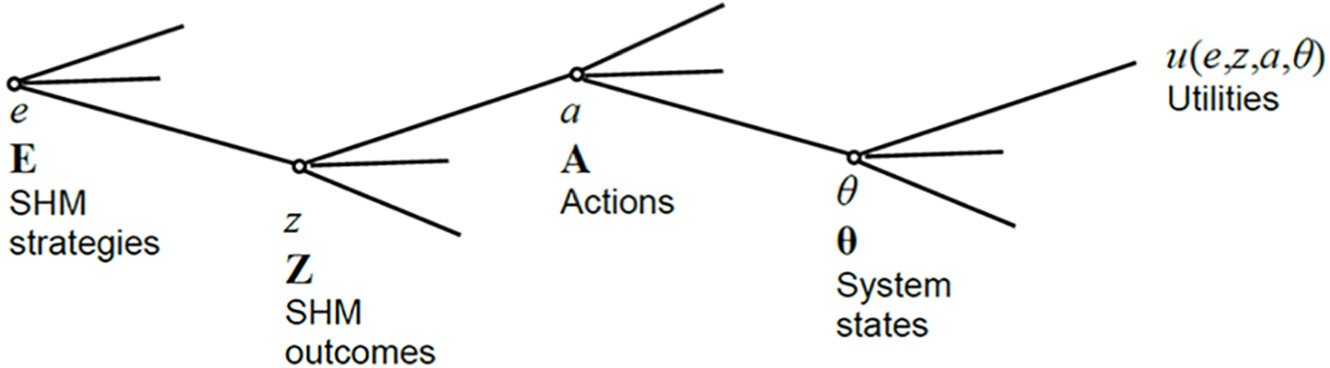
The classic format of decision tree 23 regards SHM.
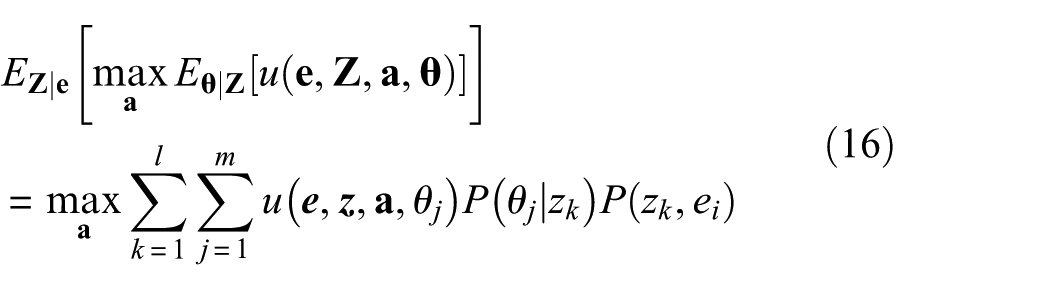
The VoI can be found as the difference between the maximum expected value of the utility obtained in pre-posterior analysis and the maximum value of the utility obtained using only prior information, shown in equation (1). This means that a value to information is assigned as expected utility gain caused by the optimal decisions regarding information acquirement and actions with and without that information relative to the costs of collecting the information

The VoI can be normalized in relation to the prior utility resulting in the relative VoI

In this way, the identification of optimal SHM strategies is facilitated for both new and existing structures under a range of operating conditions and constraints. If the cost of this information is small in comparison to the potential benefit of the information, the experiment should be performed. If several different types of experiments are possible, the decision-maker must choose the experiment resulting the overall largest expected value of utility. 29 The pre-posterior Bayesian decision analysis is utilized to model and to assess the expected value of the utility relating to yet unknown information, which can be modeled and forecasted using the prior system-state models.
Structural probabilistic system performance
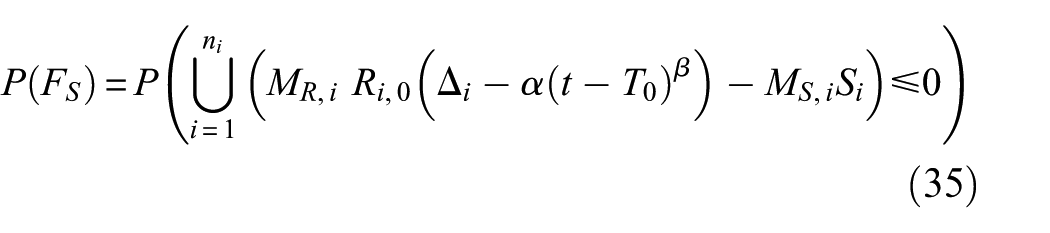
For any structural model, failure occurs when the external load S exceeds the internal resistance (material strength) R due to increase of damage and degradation. Considering the resistance model uncertainty



where
To calculate the probability of failure, a limit state function is introduced, when

It is noted that for many structural systems, deterioration states of structural components are correlated. 31 Therefore, the correlation of the deterioration states should be accounted for. The deterioration process follows equation (4). Stochastic dependence can then be modeled 32 by introducing a correlation among the damage limit state, or among the parameters of the models describing the damage limit, for example, deterioration rate α. The component failures caused by deterioration are likely to occur at different times depending on the nature of the deterioration process, which will show a lower statistical dependence than the failure events caused by overloading as all components normally fail during the same load event. The correlation coefficient for limit states of overloading failure is thus close to 1.0, 31 and the correlation coefficient of deterioration states among components is normally estimated less than 1.0.
DDS information
SHM consists of a very wide range of activities, which should provide information of relevance for the management of existing and new structures for their life-cycle performance. SHM systems are designed to provide owners and operators with information about the health of a structure. A main issue of SHM is to develop approaches for damage diagnosis, involving for example, signal processing methods for model identification and feature extraction.33–35
An approach encompassing DDS and algorithms, which is used to evaluate the structural system performance with DDS information has been developed by Thöns. 36 The employed damage detection method, which is the stochastic subspace damage detection (SSDD) method, 37 detects changes in the dynamic properties of a structure, for example, due to stiffness loss, from output-only ambient vibration measurements in a (healthy) reference state and in the current state. From these measurements, a test statistic is computed that compares both states. This results in a chi-square–distributed damage indicator, having a central chi-square distribution in the reference state and a non-central chi-square distribution in the damaged state. A threshold is set up for a desired Type-I error for a decision between both states.
The non-centrality parameter of the distribution in the damaged state can be obtained easily from measurements of the structure in the reference state and from model-based information on the damage within the theoretical framework of the method. 38 This allows in particular an efficient model-based computation of the probability of indication for any damage, without the need of recording or simulating data from the damaged structure. 39
In general, the performance of the DDS depends on the following properties:
Properties of the measurement system, like number and positions of sensors, type of sensors, sampling frequency fs, and measurement duration. These properties are typically set up by the user.
Stochastic system properties, like ambient excitation properties and the measurement noise level. These properties are not or only partially controlled by the user.
Besides these properties, the performance of the DDS strongly depends on the chosen damage detection method and its setup. This includes in particular the desired Type-I error for the indication threshold between healthy and damaged states, which also needs to be set for the SSDD method.
Note that the considered damage detection method is used as an example in this study, and any damage detection method can be used in our VoI framework if it can provide the probability of indication for the damages included in the employed deterioration model.
Integrity management actions
Integrity management actions are the possible actions that the decision-maker can take during the service life of a structure to ensure safety and functionality, for example, maintenance, inspection, repair, and replace. The decision of theoretical optimal choice of integrity management actions can be derived in the form of decision rules, which relate an experimental outcome to an action. Decision rules can—once they are derived—enhance significantly the computational efficiency. Examples of decision rules are: 40
If the monitoring outcome is above the threshold value, an inspection is made.
If the inspection outcome is above a threshold value, a repair is made.
If the expected value of damage size is above a threshold value, an inspection or repair is made.
Pre-posterior updating with DDS information
Let

as referenced by Hong.
41


The pre-posterior probability of failure if no damage is detected

where
Utility modeling and analysis
Let
Data from damaged buildings suggest that the repair costs are dependent on the overall damage state,42–44 the more overall damage is present in a structure, the higher are the repair costs for restoring the structure to the original state. The repair costs dependency on the damage state is modeled in most case, either as a linear function with a limit of repairable damage,42,43 or as a non-linearly increasing function of damage.
45
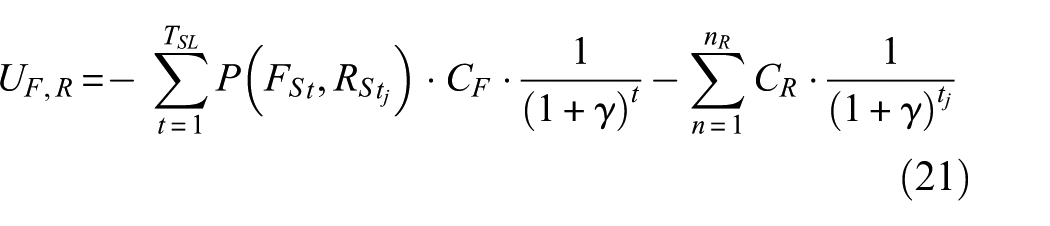
In the article, the cost of repair is modeled as a non-linearly increasing function of damage, dependent on the initial investment cost of the bridge

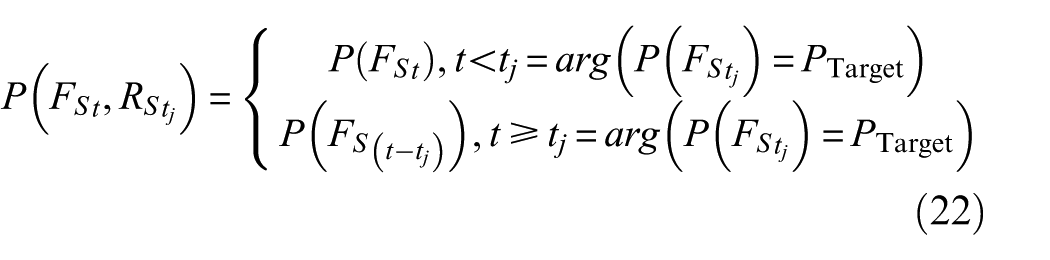
The repair action is performed when the probability of failure exceeds the target probability
The utility can be analyzed depending on the state of information acquirement at the time of the analysis. There are two types of analysis
28
named extensive form and normal form to compute the utility. In this article, the extensive form analysis is applied. If the probabilities of the various system states corresponding to different consequences of action have been estimated, which means that information on action


If additional information becomes available, which means that a specific SHM experiment


Generic parametric analysis of the value of DDS information
The parametric analysis of the value of DDS information takes basis in a generic structural system under degradation. The generic and representative structural system constitutes a series system accounting for the dependence in the component failure modes and in the deterioration of the individual structural components. Such system is representative, as it takes basis in common assumptions for target reliability determination and code calibration.47,48 The complete decision scenario encompassing the decision-maker, the decision point time, the temporal framing of the decision analysis, the specific structural system and component failure and deterioration models and their dependencies, the specific DDS information, and the utility models are introduced in the following sections.
Decision scenario
A Pratt truss girder as shown in Figure 3 is considered under operation and maintenance phase. It is assumed to experience an unusually high deterioration in the first 15 years of operation. For the remaining 35 years of the service life, a bridge manager wants to design a maintenance plan. The manager considers whether the bridge should be repaired regularly after certain times without SHM or is it worthwhile to do SHM before repairing directly to minimize the risk and expected costs. Therefore, a VoI analysis is performed to provide the decision basis. The basic decision problem is whether to choose
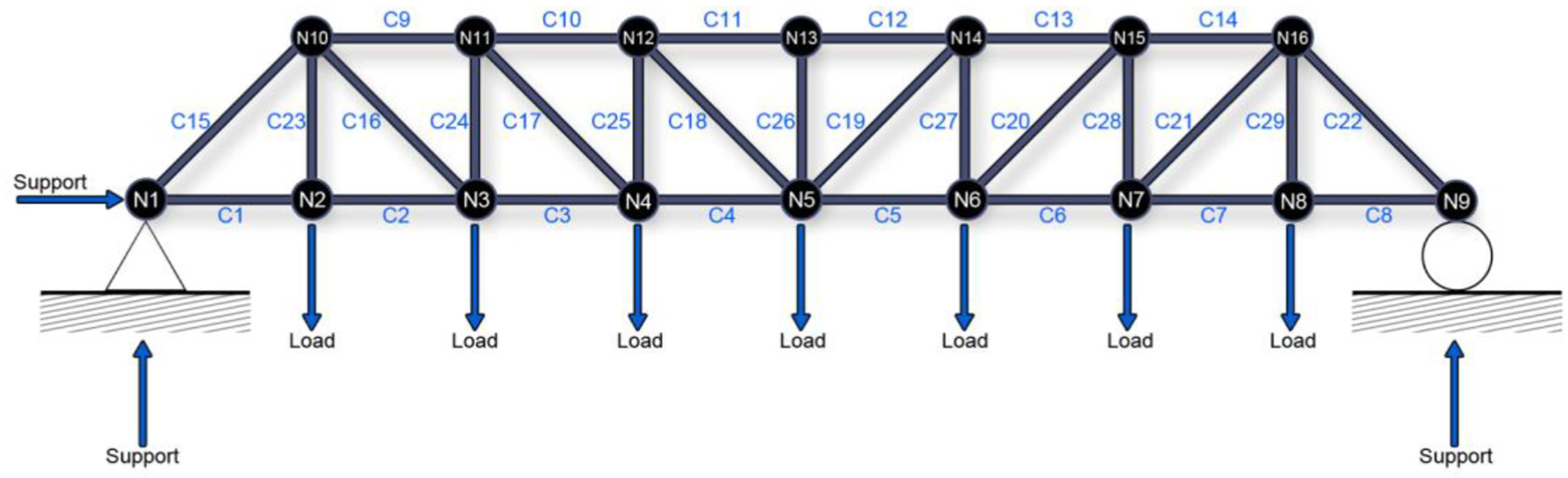
Illustration of truss bridge girder.
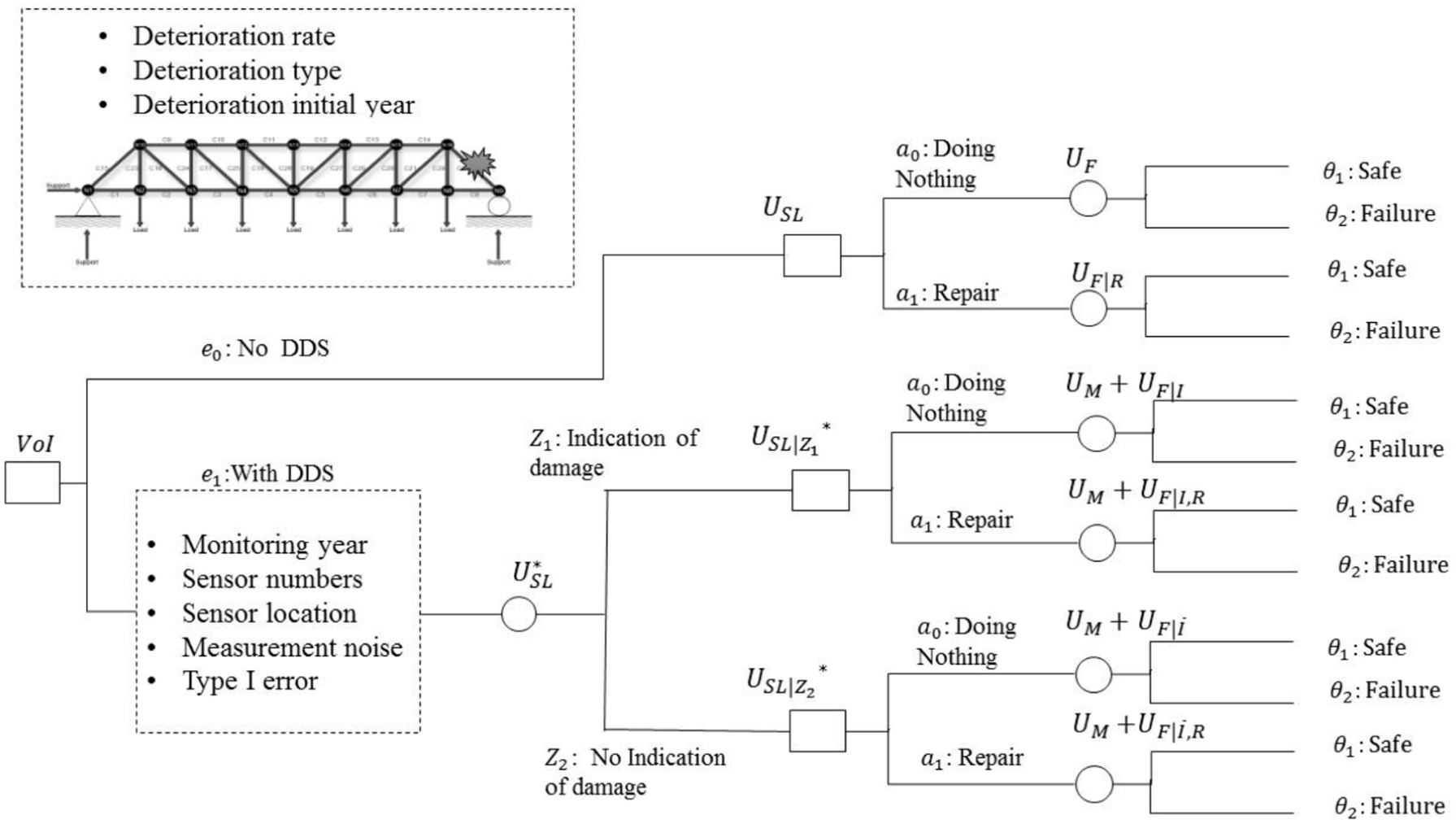
Illustration of decision tree.
The costs model is shown in Table 1, considering the discount rate r in general for long-term regulations ranged between 0.01 to 0.05 per year;
49
here we adopt for our calculation a constant discount rate of r = 0.02 per year. The initial investment cost is chosen for convenience as
Costs model.
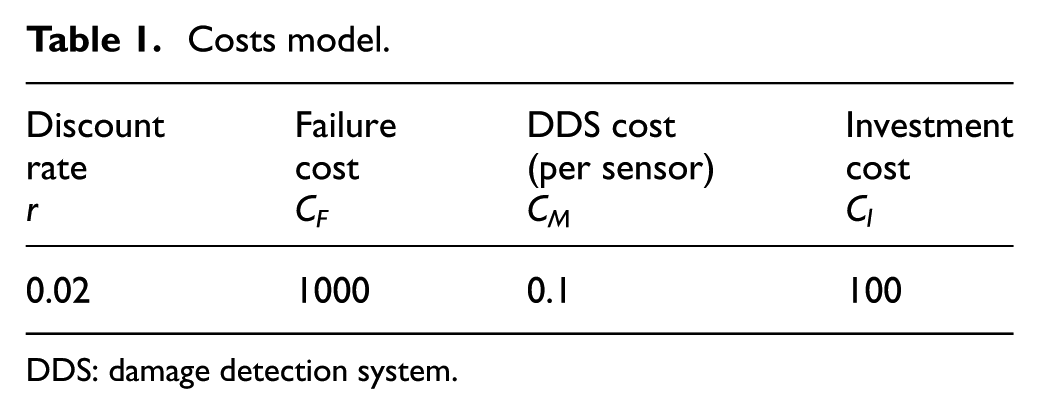
DDS: damage detection system.
VoI analysis
The value of DDS information when monitoring at year

where

where


where
where

where

The utility of failure given indication of damage




where
The utility of failure given indication of damage and repair
where
The utility of failure given no indication of damage and repair
where
Structural probabilistic performance
The truss bridge girder has 29 components with 16 joint nodes. Assume a probabilistic extreme loading
The failure of a truss component can be the failure by yielding when it is under tension as well as failure by buckling when it is under compression. If the component is under tension, the critical strength is the yield strength

where

Then the probability of system failure
According to JCSS (Joint Committee on Structural Safety),
50
the resistance model uncertainty
According to literature
52
with general corrosion, damage is equated to the total amount of metal lost. This may be expressed in terms of thickness lost, for example an expression in mm per year, or mass lost, such as grams per square meter per year. Corrosion rate on a carbon steel surface,
53
in atmospheric environment for example, industrial environment is 0.025–0.050 mm per year and in marine environment is 0.125–1 mm per year. So that three different deterioration rates are selected in this article to present three different deteriorating conditions. It is assumed that the system is required to take repair actions when the probability of failure exceeds
As previously stated in section “Structural probabilistic system performance,” the correlation among deterioration states of structural components should be accounted for. For computation convenience, the stochastic dependence is modeled by introducing a correlation among the parameters of the models describing deterioration. The damage limit is fully correlated. Thus, the correlation of the initial resistances
The probability of component/system failure is calculated by Monte Carlo simulations based on Table 2. The prior probability of system failure will increase with time. The failure probabilities with a low deterioration rate and same initial year but varied deterioration types are shown in Figure 5(a). The failure probability of the diffusion-controlled type of deterioration will always be below the target probability during the entire service life requiring no repair. However, if the system is under corrosion and fatigue, it is required to do the first repair at year 25 and in total need to be repaired three times during service life. If it is the type of sulfate attack concrete deterioration, it needs to do the first repair at year 18 and in total to be repaired nine times, which is shown in Figure 5(b). The computation results of failure probabilities with same deterioration type of corrosion and fatigue but varied deterioration rate and initial year are shown in Figure 5(c).
Summary of the prior probabilistic model parameters.
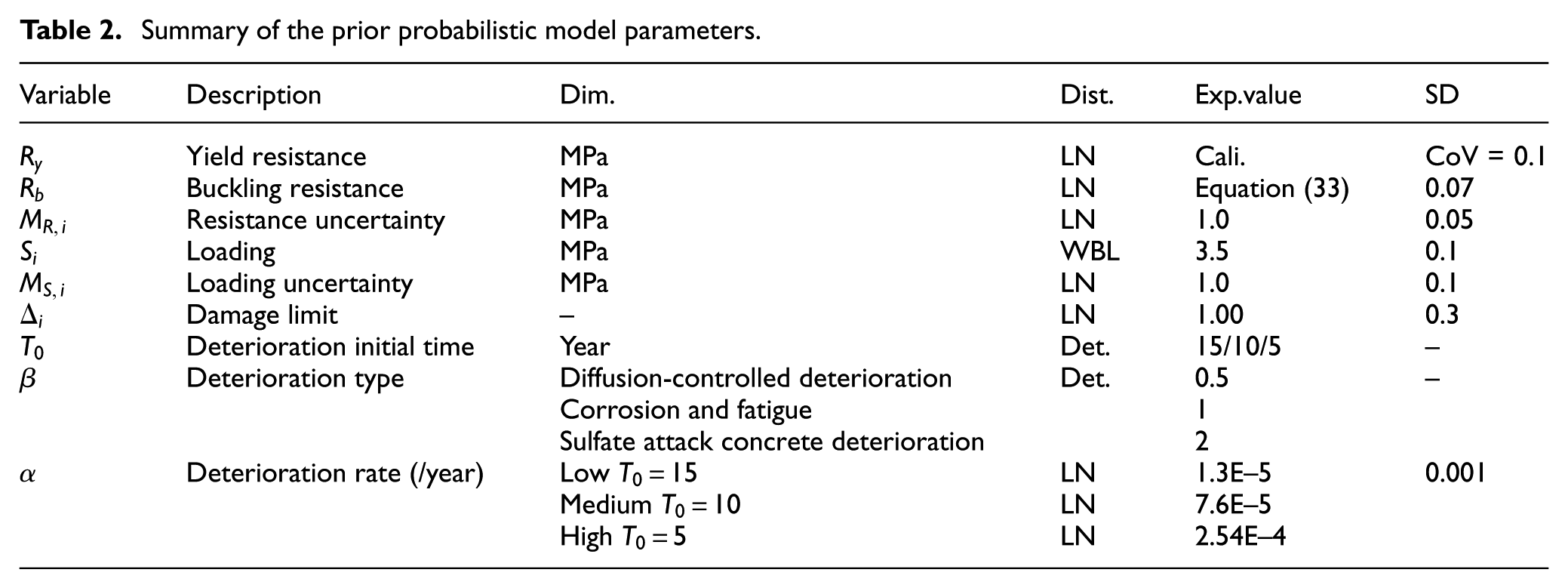
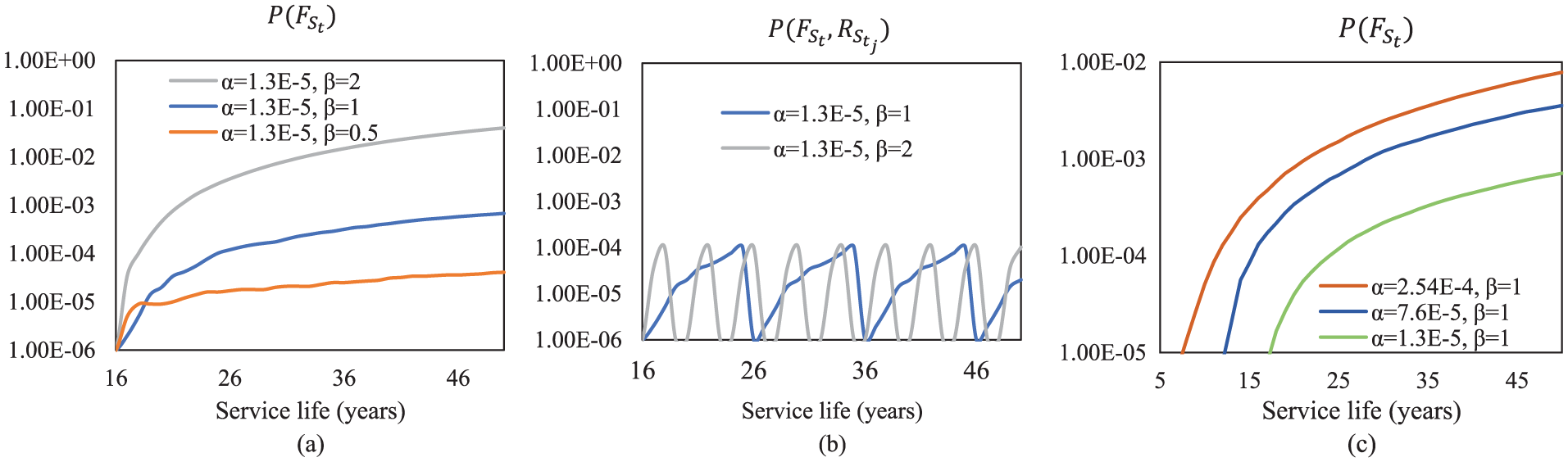
(a) Prior probability of system failure with varied deterioration types, (b) prior repair plan with varied deterioration types, and (c) prior probability of system failure with varied deterioration rate and initial year.
Properties of DDS
The DDS can detect stiffness loss in the elements of the structure. A connection to the damage states is made in this regard as follows. A stiffness loss

The element stiffness



γ is the correction factor, in which
The number of sensors, their location, and their noise properties influence the structural information content that is contained in the measurement data. In particular, it is well known that the number and locations of sensors can be optimized to obtain more precise information about the dynamic properties of structures. 54 An explicit link of the sensor placement to the performance of the considered damage detection method has been made by Döhler et al. 55 Thus, the number and location of sensors have a direct influence on the damage detection probabilities, and hence on the VoI that is examined in this article. Measurement noise (as a property of the used sensors) affects the signal-to-noise ratio and thus the information content in the signals 56 and is therefore also an important factor for the examination of the VoI. The Type-I error rate is a user-defined value for the trade-off between a low false-alarm rate and a high probability of detection. It is a design parameter for any damage detection method, reflecting the applied reliability concept 57 and has therefore a direct influence on the decisions taken based on the outcome of the damage detection method. Hence, its influence on the VoI should also be examined.
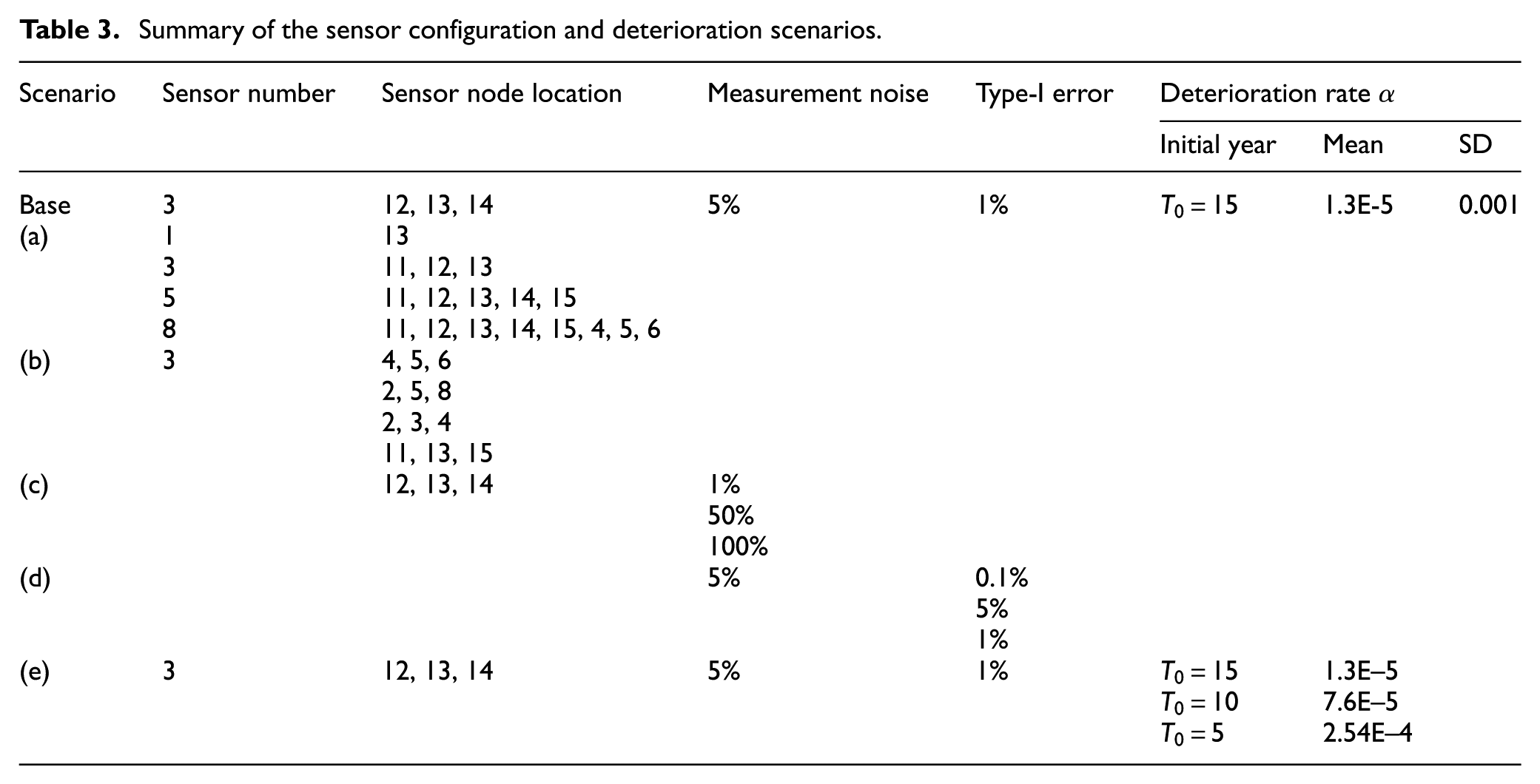
Following the above argumentation, five scenarios of DDS settings are investigated. Within all the scenarios, the structural system is under deterioration type β = 1 corresponding to corrosion or fatigue, which is reasonable for the deterioration of a steel truss bridge girder. For the reference scenario, the bridge is under low deterioration, the DDS is modeled with the acceleration sensors located in nodes 12, 13, 14 of the truss in Y-direction recording the vibration response and using the DDS algorithm. Based on the dynamic structural system model, a reference data set of length N = 10,000 at a sampling frequency of 50 Hz is simulated in the undamaged state. Ambient excitation (white noise) is assumed at all degrees of freedom, whose covariance is the identity matrix. Measurement noise is added on the resulting accelerations with standard deviation at each sensor of 5% of the standard deviation of the signal. The Type-I error for the indication threshold is set as 1%.
Based on the reference scenario, scenario (a) varies the number of sensors between 1, 3, 5, and 8. Scenario (b) varies the sensor positions when the number of sensors is fixed with three sensors. Scenario (c) changes the measurement noise from 5% to 1%, 50% and 100%. Scenario (d) changes the Type-I error for indication threshold from 1% to 0.1% and 5%. Scenario (e) varies the deterioration rate
Summary of the sensor configuration and deterioration scenarios.
The probability of damage indication in each monitoring year is computed and shown in Figure 6. The investigation of monitoring year is focused on the period from the initial deterioration year to the first scheduled repair year without monitoring from prior analysis as shown in Figure 5(b), in order to plan monitoring before directly repair. Figure 6(a) shows that the probability of damage indication
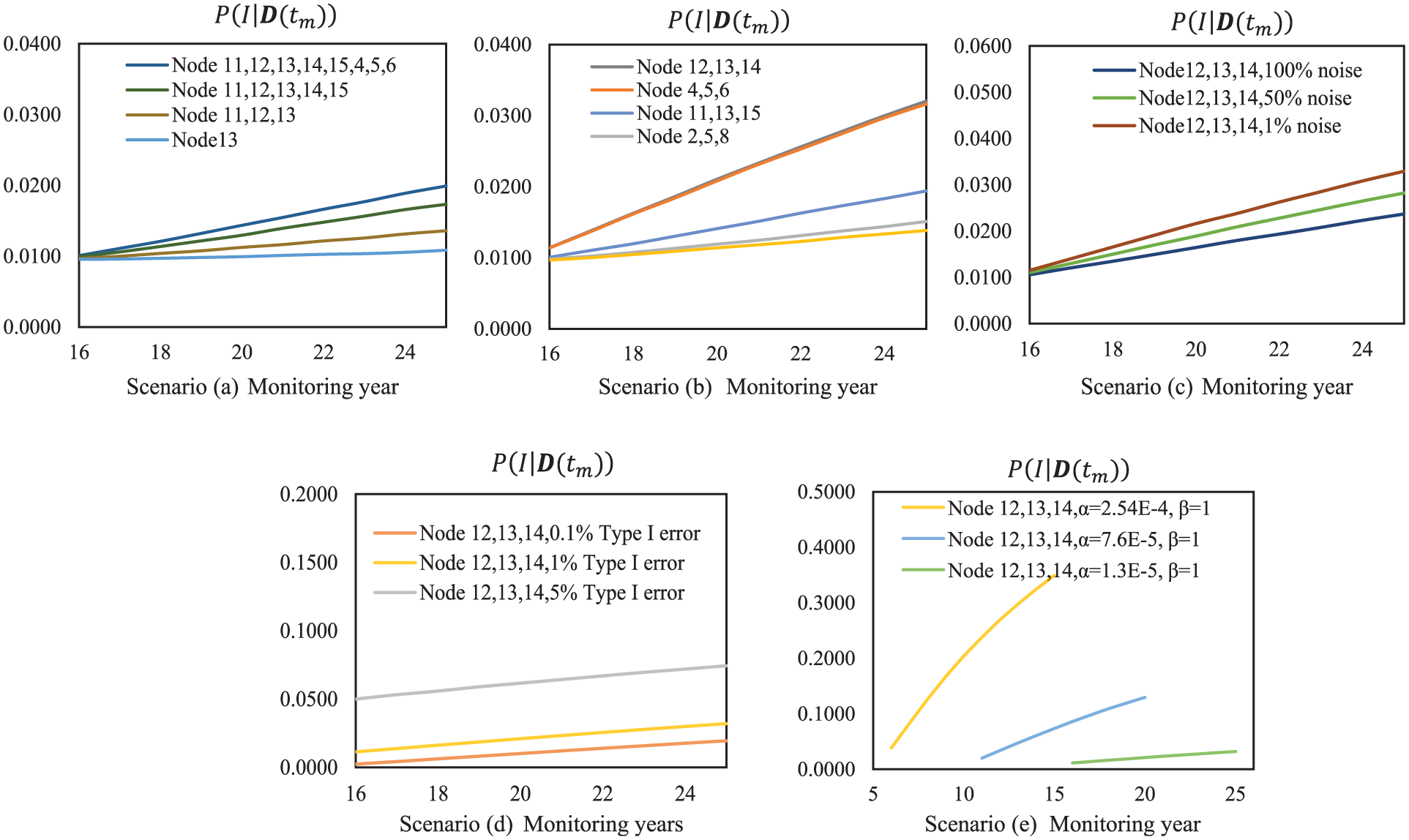
Probability of damage indication with varied scenarios (a) to (e).
Pre-posterior updating
The pre-posterior probability of system failure given damage detection information is computed following section “Pre-posterior updating with DDS information” taking basis in the Bayesian updating methods. The results are shown in Figure 7 when a DDS is monitoring at a specific year with detecting no damage. When increasing the number of sensors (a), the updated probability of failure is much lower than in the case with only one sensor. However, it can be seen that the pre-posterior probability of system failure will not be lower if installing more than three sensors. Instead, the curve of the pre-posterior probability is similar if more than one sensor is installed, which can be explained that only sensor in a specific position provides sufficient information. When installing three sensors (b), if the sensor positions are far away from the weakest components 11 and 12 (nodes 12, 13, and 14), such as in node 2, 3, or 4, the updated probability of failure will be larger toward the end of the service life. Changes in the measurement noise (c) only have a small influence on the updated curve of the pre-posterior probability, which result in larger values toward to the end of the service life when the measurement noise is large. When increasing the Type-I error threshold (d), the updated pre-posterior probability of failure during service life shows only minor differences. When increasing the deterioration rate (e), the relative reduction of pre-posterior probability of failure given no damage indication is smaller.
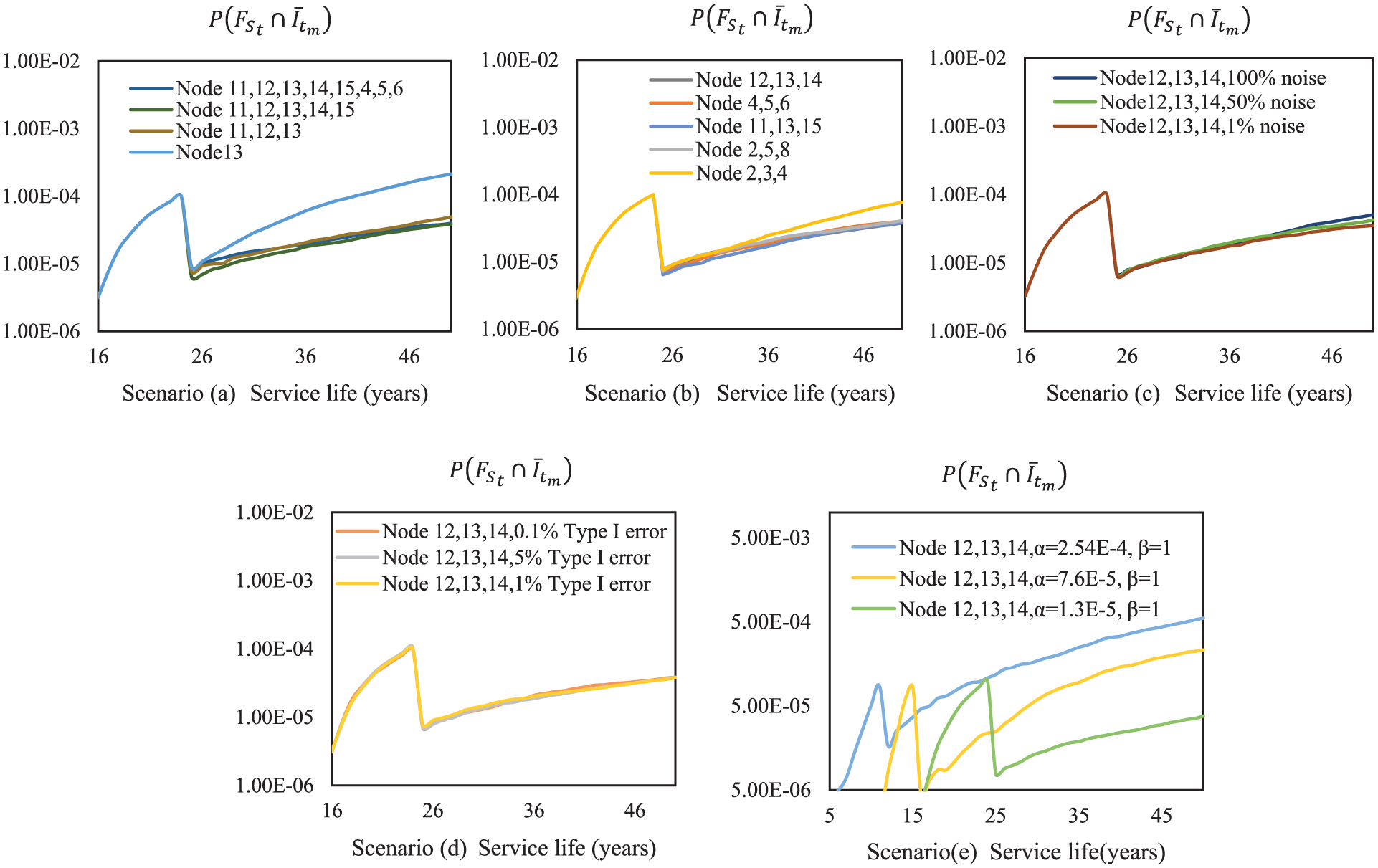
Pre-posterior probability of system failure during service life with varied scenarios (a) to (e) when monitoring and detecting no damage at a certain year.
VoI analysis results
The VoI depending on the DDS monitoring year are computed following section “VoI analysis.” The relative VoI
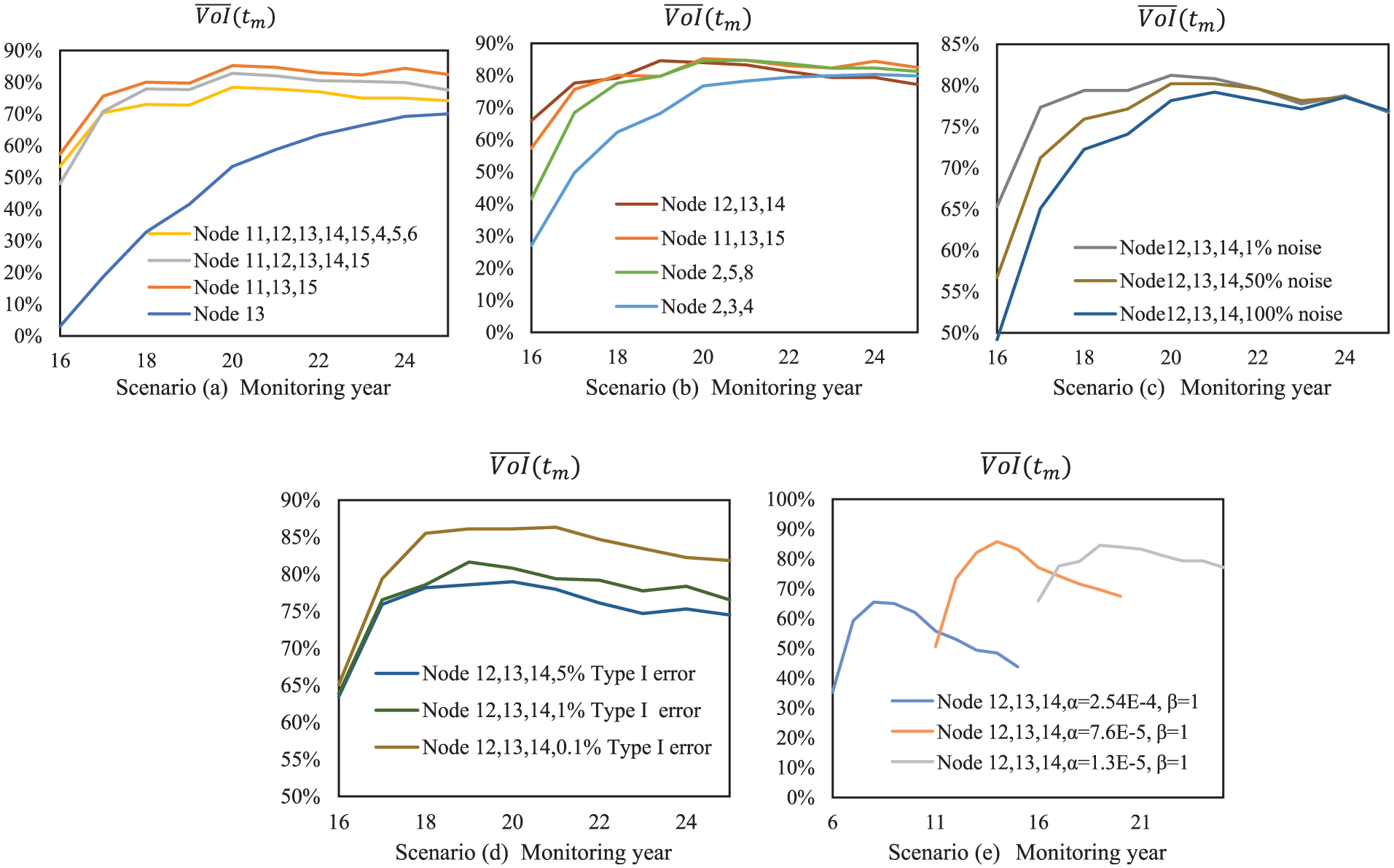
Relative value of information with varied scenarios (a) to (e) and different DDS monitoring year.
Figure 8(b) gives an indication of
Figure 8(c) investigates the relationship between
Figure 8(d) describes how the
When increasing the deterioration rate from low to medium and high based on the reference scenario in Figure 8(e), the change of the
From Figure 8(a) to (c), the impact of the three measurement parameters: sensor number, sensor location, and measurement noise, is decreasing with monitoring time. They show a similar behavior since they all influence the structural information content and are directly related to the structural condition. For the sensor numbers, it is important to have a minimum number of sensors. However, increasing the number of sensors beyond the minimum number leads to a moderate decrease of the
With Figure 8(a) to (e), the optimal DDS and structural system can be identified as: three sensors in nodes 12, 13 and 14 with 1% measurement noise and 0.1% Type-I error threshold to be employed at year 14 of the service life on a truss girder with a medium deterioration rate.
Discussion
The primary purpose of this study is to determine the structural and DDS influencing parameters on the value of DDS. Earlier research suggests that the value of SHM can be quantified, 6 previous application study focusses on methods of quantifying the VoI. 58 Our analysis provides a new insight into the relationship between VoI-based decision-making and DDS before its implementation. The results indicate that the VoI-based decision support facilitates that optimal SHM and structural system parameters can be identified leading to the maximum expected value of the utility gain. The utility gain may encompass, for example, an increased benefit generation, reduced costs for the structural integrity management and reduced risk of structural failure. These results clearly support some of the earlier research 53 that the quantification of the value of the DDS information may serve as a basis for DDS design and employment optimization.
Within the scope of this article, DDS information and structural system parameters have been identified leading to the highest expected risk and cost reduction for the structural integrity management of a representative engineering structure. The VoI-based decision-support beyond the scope of this article may encompass various other decision scenarios such as the combination of different monitoring/measurement strategies and techniques to determine the optimal maintenance planning as well as service life extension.18,59
From the viewpoint of structural integrity management, there is no necessity for continuous monitoring with a DDS, as a single application in the service yields a significant risk and cost reduction, through achieving a significant value of DDS information. It should be noted that multiple DDS information may incorporate a high dependency and thus may prevent an increase of the VoI. However, multiple and continuous structural health information and their dependencies require further research.
The application of VoI-based decision on the truss girder has demonstrated its ability to support the design and employment of a DDS before implementation. The parametric analysis of the value of DDS information takes basis in a generic and representative structural system accounting for the dependence in the component failure modes and in the deterioration of the individual structural components. The choice of the structural system and a comprehensive generic deterioration model is representative for many—but not all—structural systems according to codes and standards. Besides, due to the complexity of the decision scenario and the decision analysis, assumptions focusing on fatigue and corrosion degradation in conjunction with well-justified repair and normalized cost models are applied. However, there are still many challenges ahead. Clearly, for a specific application, it is required to adjust the decision scenario including the calibration of the generic and normalized models, for example, with a more specific degradation modeling approach.
Conclusion
This article introduces the VoI-based method to determine the structural system influencing parameters with deterioration type and deterioration rate as well as DDS-influencing parameters including the number of sensors, sensor location, measurement noise, and Type-I error for indication threshold. Through quantification of the value of DDS, it is shown that the design of the DDS system (i.e. the number of sensors, sensor positions, noise, and indication threshold) can be optimized as well as its deployment time to achieve maximum expected life-cycle benefits.
This article facilitates comprehensive guidance for (a) designing DDS by sensor number, sensor location, (b) decision support for DDS employment by degradation mechanisms, and (c) for the DDS utilization by determining the optimal time of information acquirement.
The example of the deteriorating truss bridge girder under fatigue or corrosion illustrates that
It is cost and risk reduction efficient to implement DDS compared to the scenario when directly repairing without monitoring.
The structural deterioration rate is the most sensitive parameter effecting of relative VoI of DDS over the entire service life.
The optimal DDS employment year varies depending on the DDS and structural system properties.
The employment of only one DDS measurement in the service yields a high relative VoI.
The number of sensors should be chosen with optimization as more sensors do not lead to a higher relative VoI.
The sensor locations should be chosen with thorough consideration of the damage and failure scenarios of the structural system.
The measurement noise and the Type-I error for indication threshold should be controlled as small as possible in order to achieve the highest relative VoI.
The value of DDS information quantification can be a powerful tool to determine optimal settings and sensor employment.
It should be noted that only a finite set out of many possible sensor configurations have been analyzed in this study, and there might be other configurations which may lead to a slightly higher relative VoI. Nevertheless, the results can be used as an example to develop optimal lifetime maintenance strategies for similar bridges to optimize the DDS settings and sensor configuration for maximum expected utilities before implementation of the DDS.
Footnotes
Acknowledgements
The grant is gratefully acknowledged. Furthermore, the support of COST Action TU1402 on Quantifying the Value of Structural Health Monitoring is gratefully acknowledged. The authors would like to thank the reviewer for the insightful and constructive review.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was performed within the European project INFRASTAR (infrastar.eu), which has received funding from the European Union’s Horizon 2020 research and innovation program under the Marie Skłodowska–Curie Grant (agreement no. 676139).