
Abstract
In this article, a high-resolution extension of CLEAN-SC is proposed: high-resolution-CLEAN-SC. Where CLEAN-SC uses peak sources in ‘dirty maps’ to define so-called source components, high-resolution-CLEAN-SC takes advantage of the fact that source components can likewise be derived from points at some distance from the peak, as long as these ‘source markers’ are on the main lobe of the point spread function. This is very useful when sources are closely spaced together, such that their point spread functions interfere. Then, alternative markers can be sought in which the relative influence by point spread functions of other source locations is minimised. For those markers, the source components agree better with the actual sources, which allows for better estimation of their locations and strengths. This article outlines the theory needed to understand this approach and discusses applications to 2D and 3D microphone array simulations with closely spaced sources. An experimental validation was performed with two closely spaced loudspeakers in an anechoic chamber.
Introduction
Location of acoustic sources by phased array beamforming is subject to spatial resolution bounds, i.e. sources which are too close to each other cannot be resolved. The conventional beamforming (CB) method 1 is limited by the Rayleigh criterion, 2 which describes the minimum spacing between two resolvable sources as a function of array aperture and frequency. A further restriction of the application of CB is set by the dynamic range 1 of the array, which is the maximum level difference between the peak source and other detectable sources. The first step towards minimisation of these limitations is the design of appropriate array patterns.3,4 To obtain further enhancements in spatial resolution and dynamic range, deconvolution methods like DAMAS 5 and high-resolution methods like Functional Beamforming 6 have been proposed.
A well-known deconvolution technique is CLEAN-SC. 7 This method starts with an acoustic image obtained with CB and features the iterative removal of those parts of the acoustic image that are coherent with the peak source. For each iteration step, the removed part of the image is related to a ‘source component’, which estimates measured microphone data due to a single coherent source. Each source component is represented by an artificial ‘clean beam’ at the peak location in a new acoustic image: the ‘clean map’. The levels of the clean beams are calculated from the source components.
An advantage of CLEAN-SC, compared to other advanced beamforming methods, is its low sensitivity to errors made in the source model that describes sound propagation from potential sources to microphones. Another convenient feature is that the determination of source components is not very sensitive to the location that is marked as peak. In other words, if the scan grid is too coarse or if it is out of focus, a small error may be made in the peak location, but the corresponding source levels remain correct. Thus, CLEAN-SC provides levels at a higher reliability than CB.
CLEAN-SC is an appropriate tool for determining acoustic sources within a large range of levels, not being limited to the conventional dynamic range. On the other hand, it does not provide a spatial resolution beyond the Rayleigh limit. If two sources are too close to each other, the CB peak location is somewhere in between both sources, and the corresponding CLEAN-SC source component is a linear combination of the two individual sources.
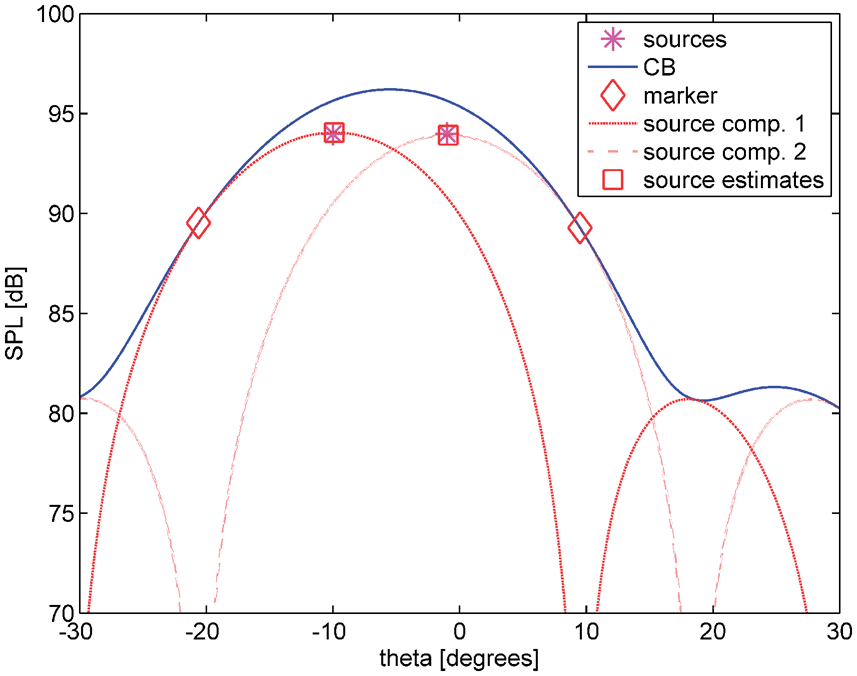
In those cases, it can be advantageous to move the ‘source marker’ away from the actual peak location, to a location where the CB result is dominated by either one of the sources (see Figure 1). The thus obtained source components are significantly better estimates of the array data from the true sources. Improved estimations of the locations of the sources are obtained by applying CB to the improved source components.
Sketch of the main idea of HR-CLEAN-SC.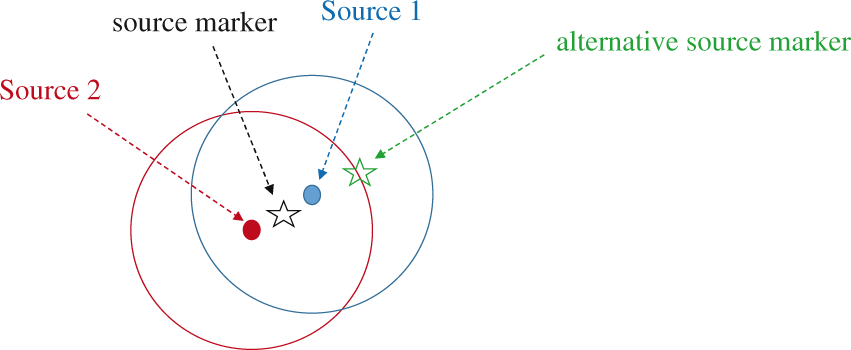
To determine the best marker locations, knowledge about the actual source locations is required. But these locations are not always known a priori. However, we will demonstrate that an iterative procedure, starting with the standard CLEAN-SC solution, also leads to an increase in resolution, based on the idea of optimising marker locations.
In the following section, the theory is outlined. In ‘Simulated array data’ section, applications to 2D and 3D microphone array simulations with closely spaced sources are discussed. ‘Experimental validation’ section describes an experimental validation with two loudspeaker sources. The conclusions are summarised in the final section.
Theory
The cross-spectral matrix (CSM)
The starting point for frequency-domain beamforming methods with microphone arrays is the CSM. It is assumed here that the CSM can be written as a summation of contributions from K incoherent sources:

Herein, The CSM is calculated from a large number of time blocks, so that the ensemble averages of the cross-products There is no decorrelation of signals from the same source between different microphones (e.g. due to sound propagation through turbulence). There is no additional incoherent noise.
Steering vectors
Beamforming methods make use of ‘steering vectors’

For beamforming, a so-called ‘scan grid’ is defined, which is basically a set of steering vectors coupled to potential sources. The scan grid should comprise all sources that produce the CSM. It is favourable, in general, to implement the most accurate representation of the physics into the steering vectors, in other words, to maximise the likelihood of steering vectors

For actual array measurements, however, there is usually no exact proportionality. Deviations between actual source vectors and theoretical steering vectors can be due to the source not being a true point source, a non-uniform directivity, errors in the scan grid, errors in the microphone locations, errors in the sound propagation model or errors in the microphone sensitivity.
The aim of beamforming is to detect sources and to determine associated source powers, i.e. to decompose the CSM like

For ideal source vectors

CB
The expression for calculating source power estimates with CB is


Application of CB to the CSM assumed in equation (1) yields

For ideal source vectors, equation (3), we have

Equation (9) provides a good source power estimate for source k when the j-summation in the right-hand side is relatively small. If the sources

The expression in the left-hand side of equation (10) is known as the ‘point spread function’ (PSF) of source j. Equation (10) states that the sources j and k must be sufficiently far away from each other, and that side lobes of the PSF should be small.3,4 The PSF characteristics thus limit the application of CB. The aim of deconvolution methods, like the ‘CLEAN’ methods discussed in the next section, is essentially to correct for the PSFs.
CLEAN-PSF and CLEAN-SC
The classical CLEAN
9
deconvolution algorithm (referred to as ‘CLEAN-PSF’ in the CLEAN-SC publication
7
) works as follows. Let



The CLEAN-SC
7
counterparts of equations (12) and (13) are



If the best-matching steering vector

Thus, the dirty CSM gets polluted by contributions of the principal source. These contributions, however, can be relatively small, depending on the values of
In the non-ideal case, when
High-resolution CLEAN-SC
The fact that the best-matching steering vector


To evaluate the cost functions of equation (19), we need an initial set of source vector estimates

For each marker, the corresponding source component is

Source locations and power estimates are calculated by maximising the CB expression



The approximation herein is because

After having performed these evaluations for each j, we can proceed with the next update by again successively minimising equation (20).
However, if sources of equal strength are spaced closely together (closer than the Rayleigh limit), then CLEAN-SC distributes the acoustic energy unequally over the source components. Thus, the weakest source contributes the least to the cost function, equation (20). This may lead to an optimum in which the weak sources remain weak. Therefore, we will omit the amplitudes in the cost function and use

With this cost function, the solutions are basically scan grid points. This makes the solution space finite, so that the process can stop after a finite number of iterations.
To avoid division by zero in equation (26), we need to set a constraint on the marker location

This means that the PSF-value at the marker location is not more than
The method outlined above is called high-resolution CLEAN-SC (HR-CLEAN-SC), as it is a straightforward extension to standard CLEAN-SC, yielding a higher spatial resolution.
CSM diagonal removal
An important feature of CLEAN-SC is that it works well with CSM diagonal removal. In that case, the expression for the source component reads:
7


There is no straightforward way to derive cost functions similar to equation (20) or (26). However, a reasonable estimate of equation (26) is

The removed diagonal equivalent of equation (30) is

The optimisation process is then equivalent to ‘High-resolution CLEAN-SC’ section. The source components


Simulated array data
In this section, we consider examples of 2D and 3D synthesised array measurements. The starting point for the simulations are CSMs obtained by evaluating summations like equation (1), so the assumptions listed in ‘The cross-spectral matrix (CSM)’ section are valid. By writing the CSM like this, separate sources are forced to be incoherent. For the threshold value introduced in equation (27), we choose:

In other words, the PSF-value at the marker location is not more than 6 dB below the peak. As a rule, HR-CLEAN-SC needs not more than 10 iteration steps to converge to a solution of equation (26). However, in some cases, a repetitive loop exists between two solutions. Therefore, the maximum number of iterations was set to 20.
2D simulation
Array measurements were synthesised with a linear array of 2 m length, consisting of 101 microphones, uniformly spaced at 2 cm. The sound field consisted of plane waves, arriving from directions characterised by angles

The array is on the

The simulated sound field consisted of two incoherent plane waves at 500 Hz, both at 1 Pa rms (94 dB), with incident angles −10° and −1°. Figure 2 shows the locations (angles) and the amplitudes of the sources, the CB array response, and the contributions from the sources individually (the PSFs). The angular spacing between the two sources is less than half the angular distance Array response of sources at −10° and −1°, 500 Hz. Left: PSFs and ideal source marker locations; right: CLEAN-SC solution.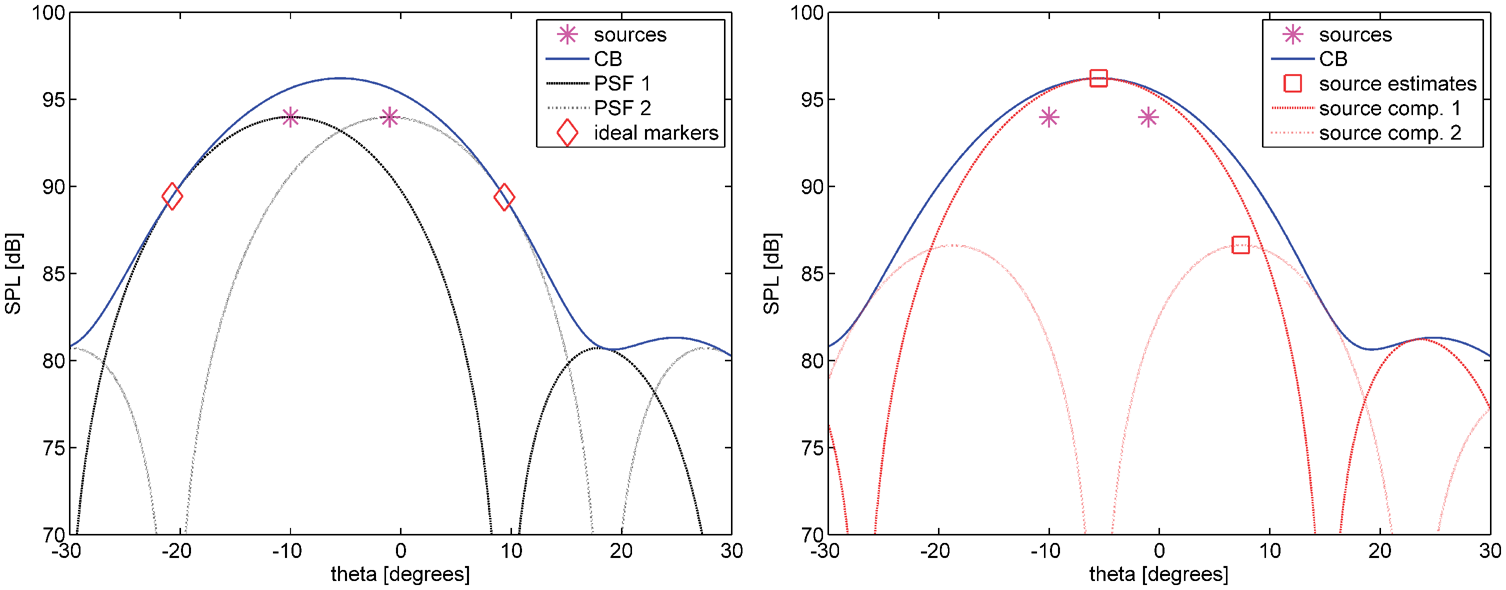

The HR-CLEAN-SC method, outlined in ‘High-resolution CLEAN-SC’ section, would give a perfect reconstruction of the PSFs if the source markers
The first step in the iteration process is made with standard CLEAN-SC. Herewith, two sources and corresponding source components are found as indicated in Figure 2 (right). The first source is found halfway the two actual sources and at a higher level. The second source has a much lower level and is found at a completely wrong location. However, this first estimate of the source locations is used to find first estimates of the source markers, by searching for minima of the PSFs associated with the source location estimates. The result is shown in Figure 3 (left).
Sources at −10° and −1°, 500 Hz. Left: PSFs of CLEAN-SC solution and first marker estimates; right: first update of source estimates.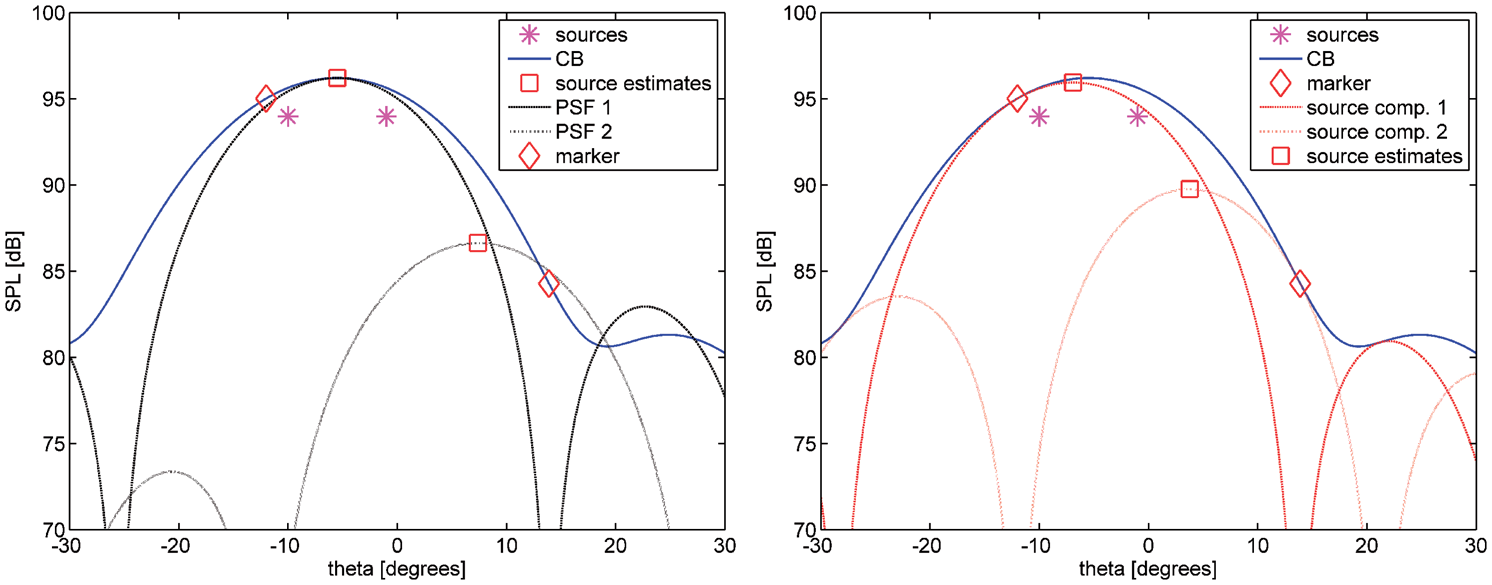
The next step is to calculate source components, equation (21), starting from these markers. Updated source locations are then found by searching the maximum value of the source components. This is illustrated in Figure 3 (right). By considering the PSFs of these updated source locations, we can find new marker locations, as illustrated in Figure 4 (left). With these new markers, we can determine new source components and update the source estimates, as shown in Figure 4 (right), and so on. By comparing the right-hand sides of Figures 2 to 4, we see that the source estimates clearly move into the directions of the true sources. After 10 iterations, the process has fully converged and the source estimates coincide with the true sources. This is shown in Figure 5.
Sources at −10° and −1°, 500 Hz. Left: PSFs of first source updates and second marker estimates; right: second update of source estimates. Sources at −10° and −1°, 500 Hz. 10th update of source estimates.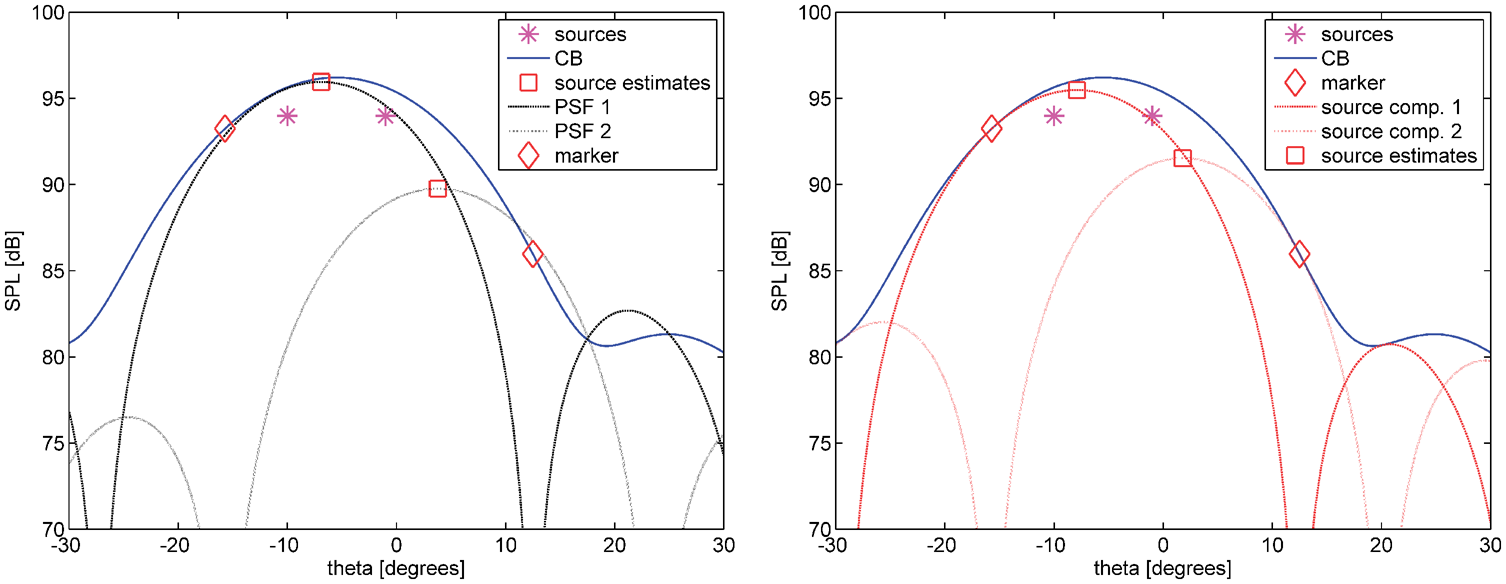
With this simulation, we demonstrated that the spatial resolution can be increased by a factor of 2 compared to the Rayleigh limit. The gain in resolution that can be attained depends on the constraint defined in equation (34). In fact, with the constraint value of 0.25 (6 dB), a gain by a factor 2.5 is possible in this 2D set-up (which follows from an analysis similar to the 3D analysis in Appendix 1).
Finally, it is noted that waves with equal strengths, as in this simulation, represent the worst case for HR-CLEAN-SC. When two sources have unequal strengths, the primary CB peak will be closer to the loudest source, and the associated CLEAN-SC source component contains less energy from the secondary source.
3D simulations
Simulations in three dimensions were made with an acoustic array in the Array for 3D simulations.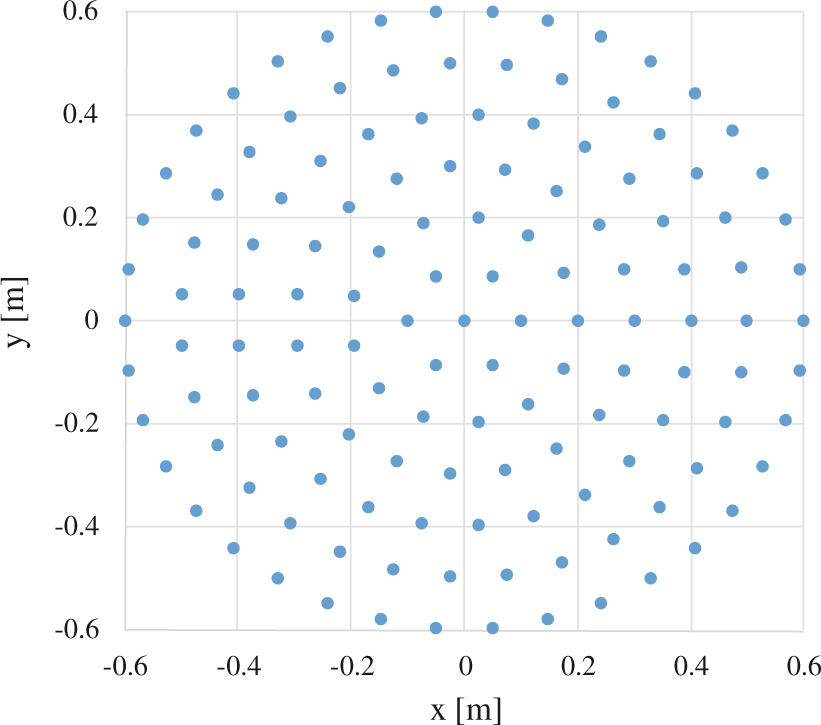

Two sources
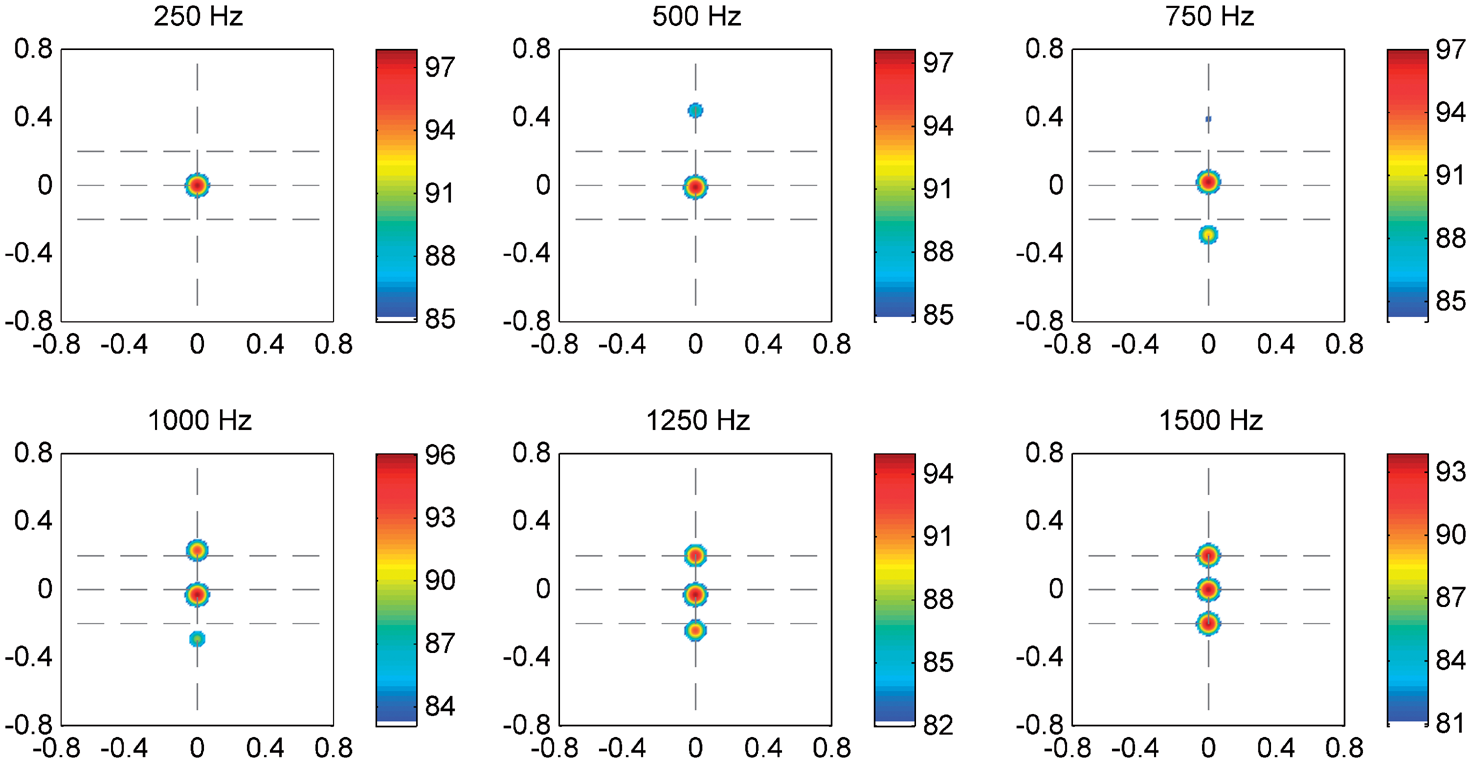
The first simulation was made with two sources on the CB results with two sources (located at dashed line intersections). CLEAN-SC results with two sources (located at dashed line intersections).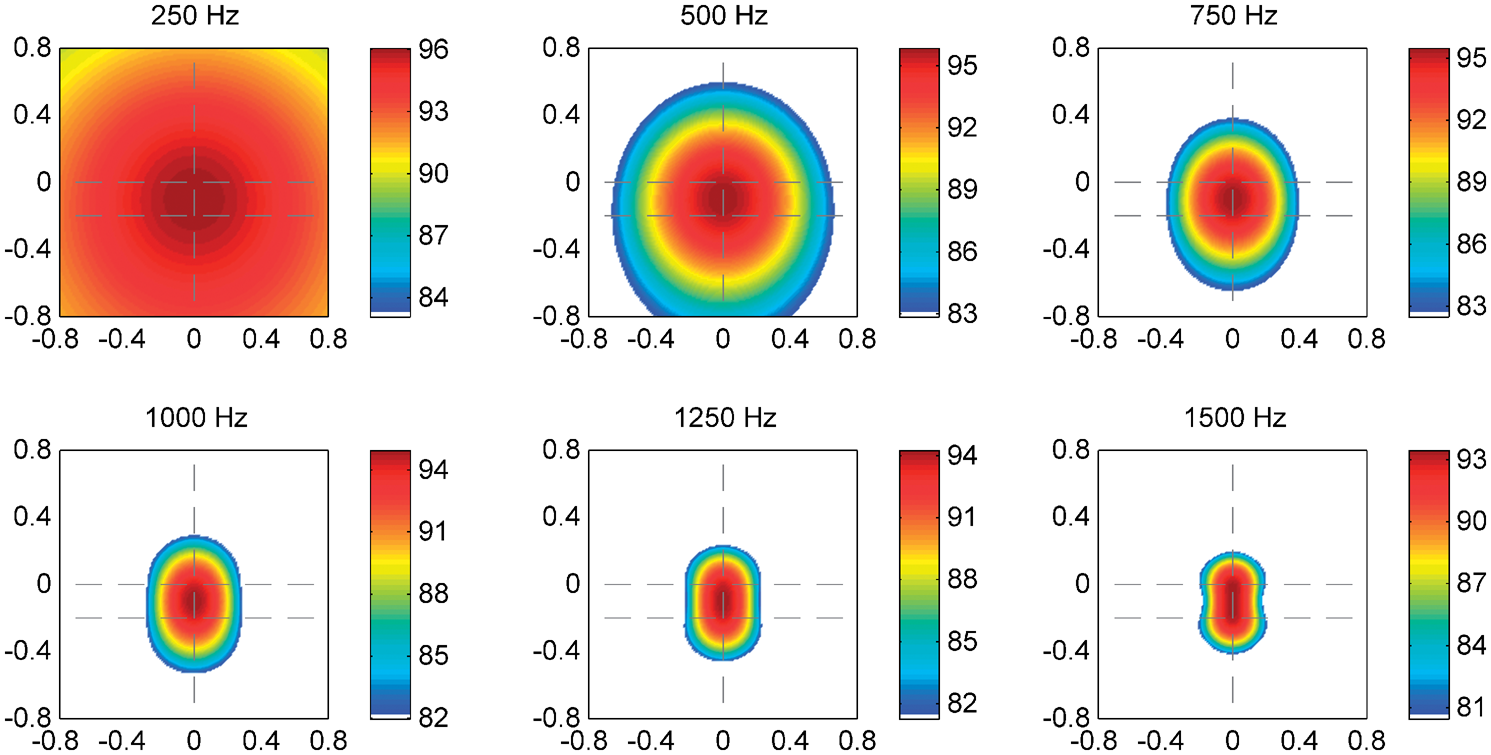
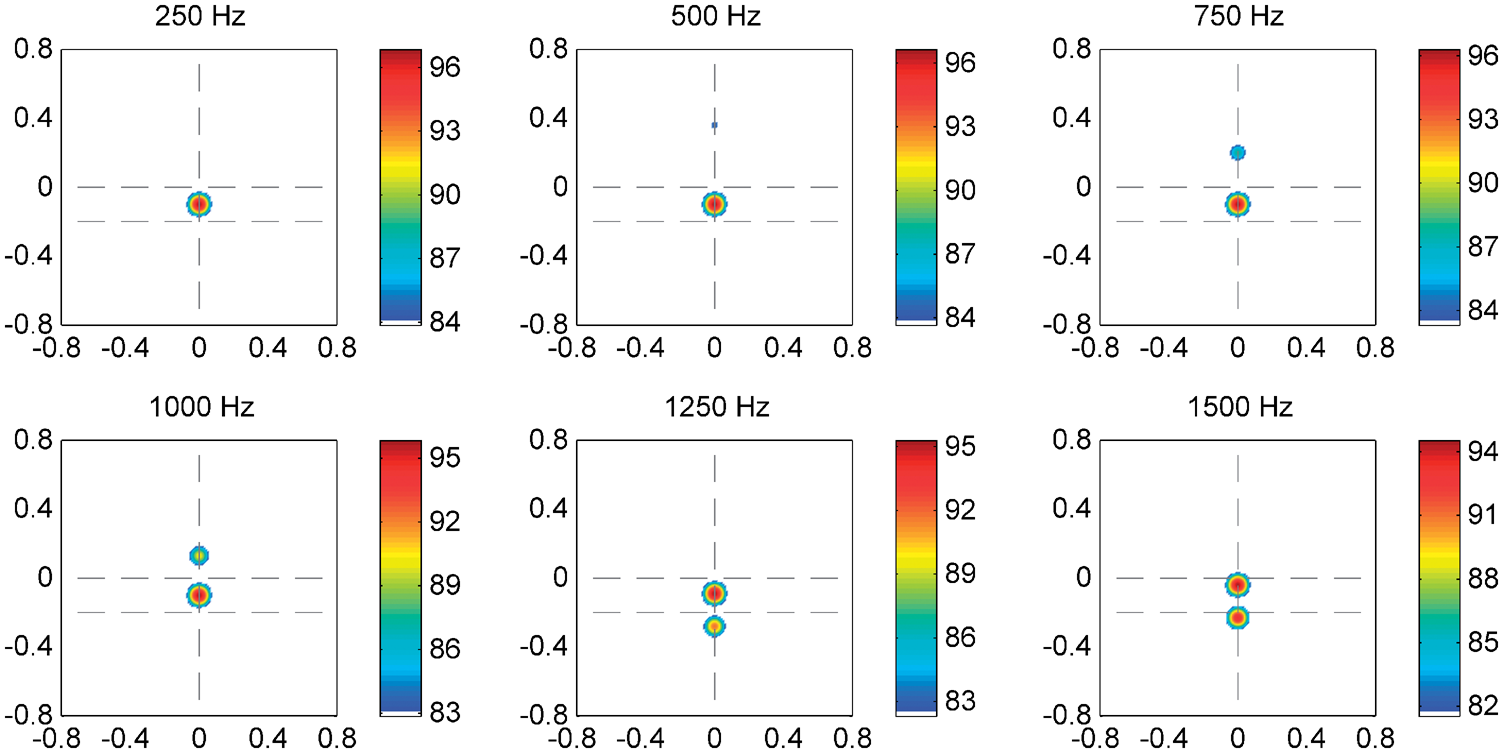
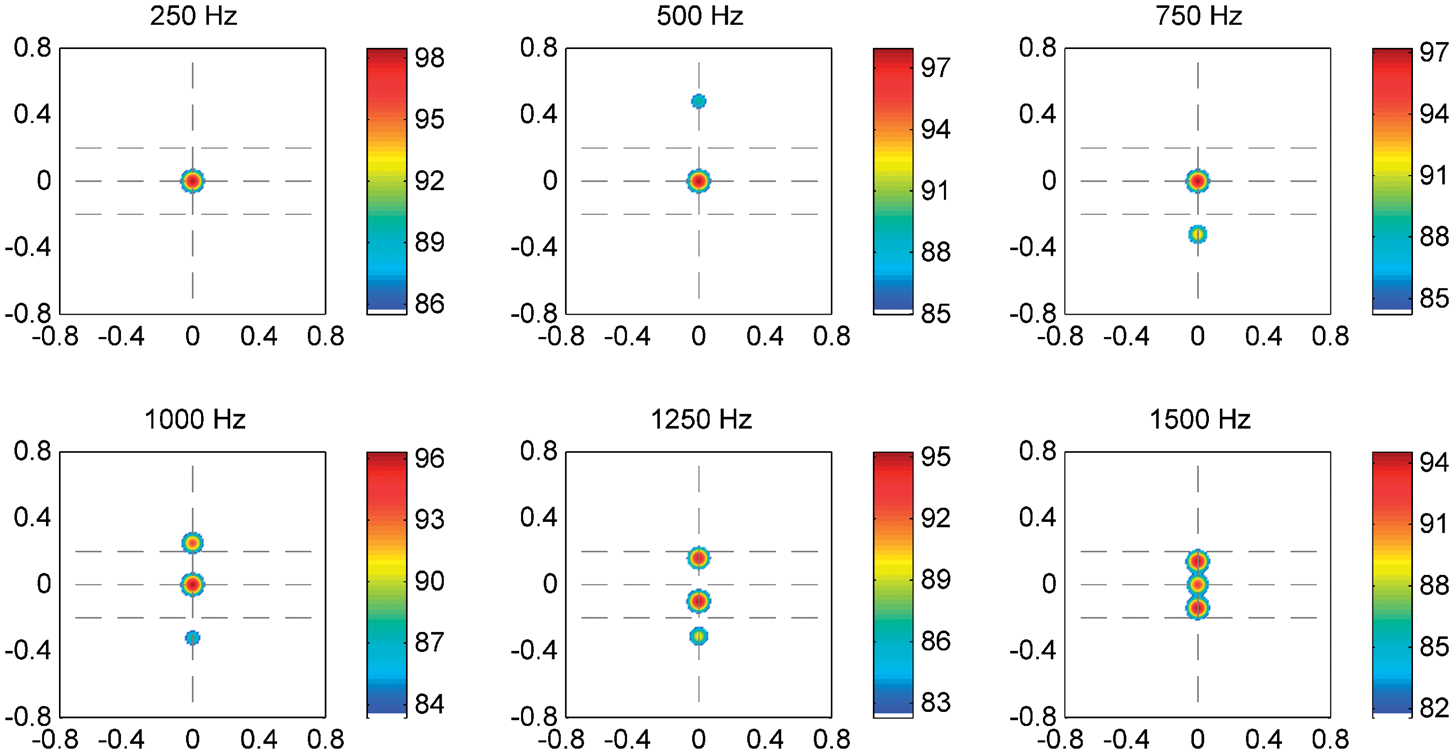
The HR-CLEAN-SC results are shown in Figure 9. A comparison with Figure 8 clearly shows the improvement of HR-CLEAN-SC, both in the location of the sources and in their estimated levels. The quality of the 500 Hz image in Figure 9 is comparable to the 1000 Hz image in Figure 8, and the same holds for the respective images at 750 Hz and 1500 Hz. Thus, it seems justified to conclude that the spatial resolution has increased by a factor 2. This is in line with the theory outlined in Appendix 1, where a gain by a factor 2.37 is predicted with HR-CLEAN-SC results with two sources (located at dashed line intersections).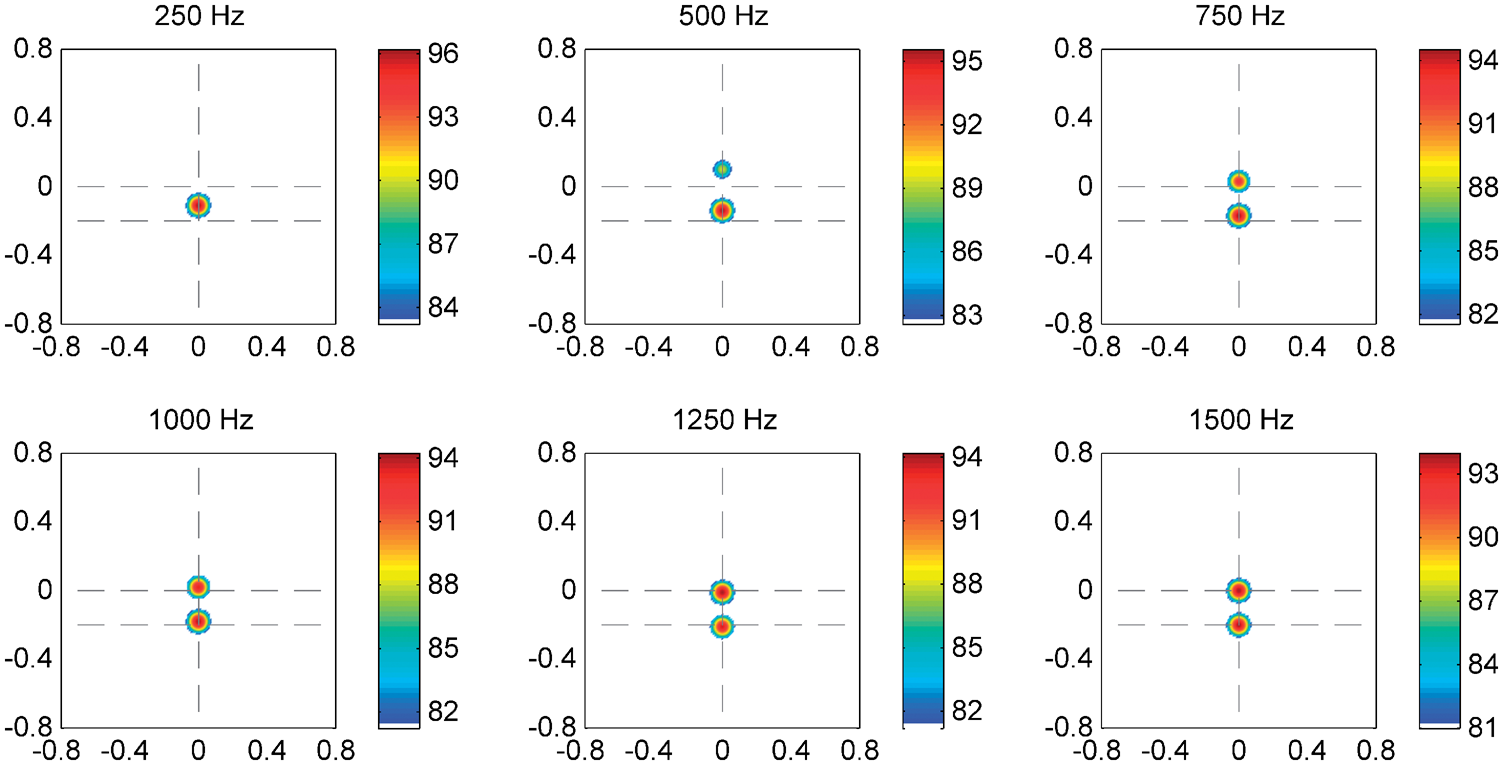
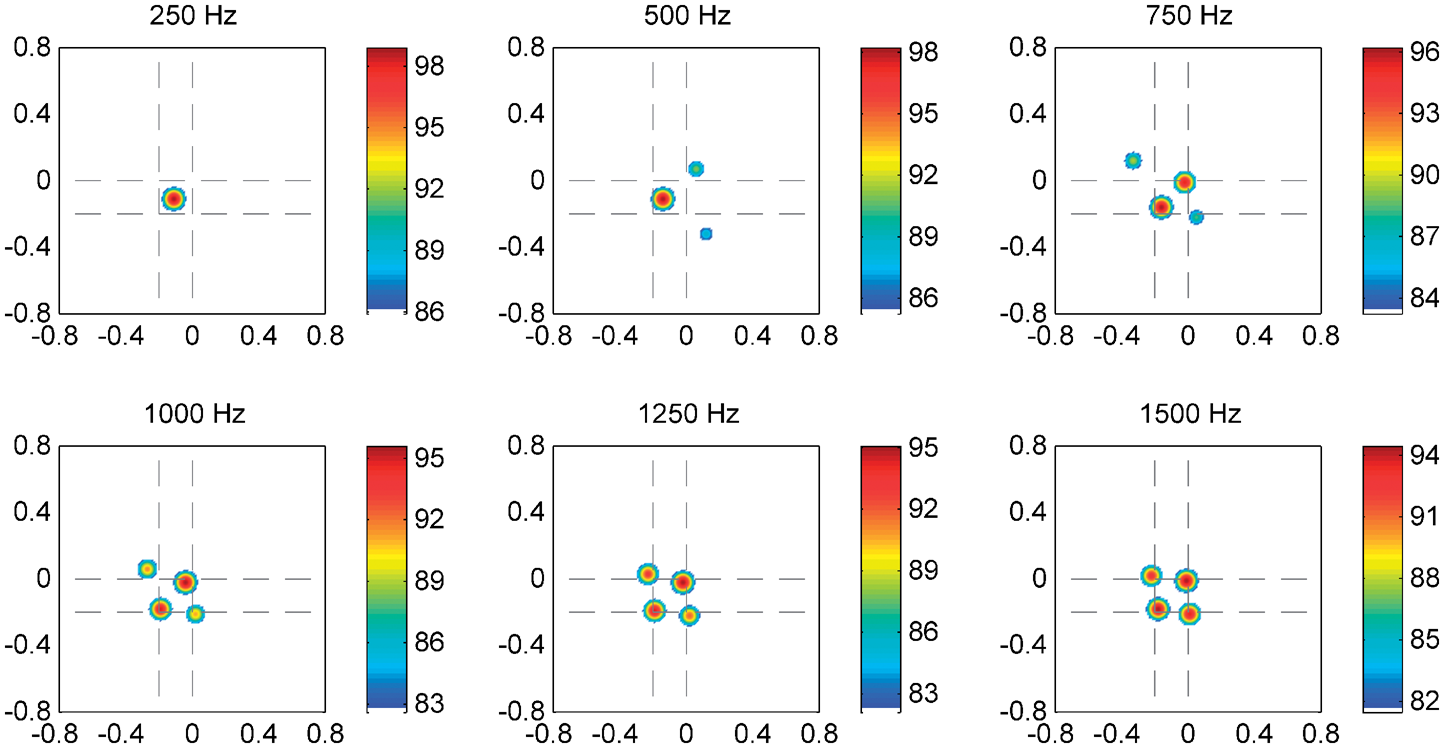
The beamform images in Figures 7 to 9 were obtained with the full CSM. However, in many beamforming applications, it is necessary to remove the diagonal. As outlined in ‘CSM diagonal removal’ section, the HR-CLEAN-SC approach without the CSM diagonal is less exact. This is confirmed by Figure 10, which is the removed diagonal equivalent of Figure 9. The results without diagonal are a little worse (especially at the lower part of the frequency range) than with full CSM. Nevertheless, there is still significant improvement compared to standard CLEAN-SC.
HR-CLEAN-SC results with two sources (located at dashed line intersections); CSM diagonal removed.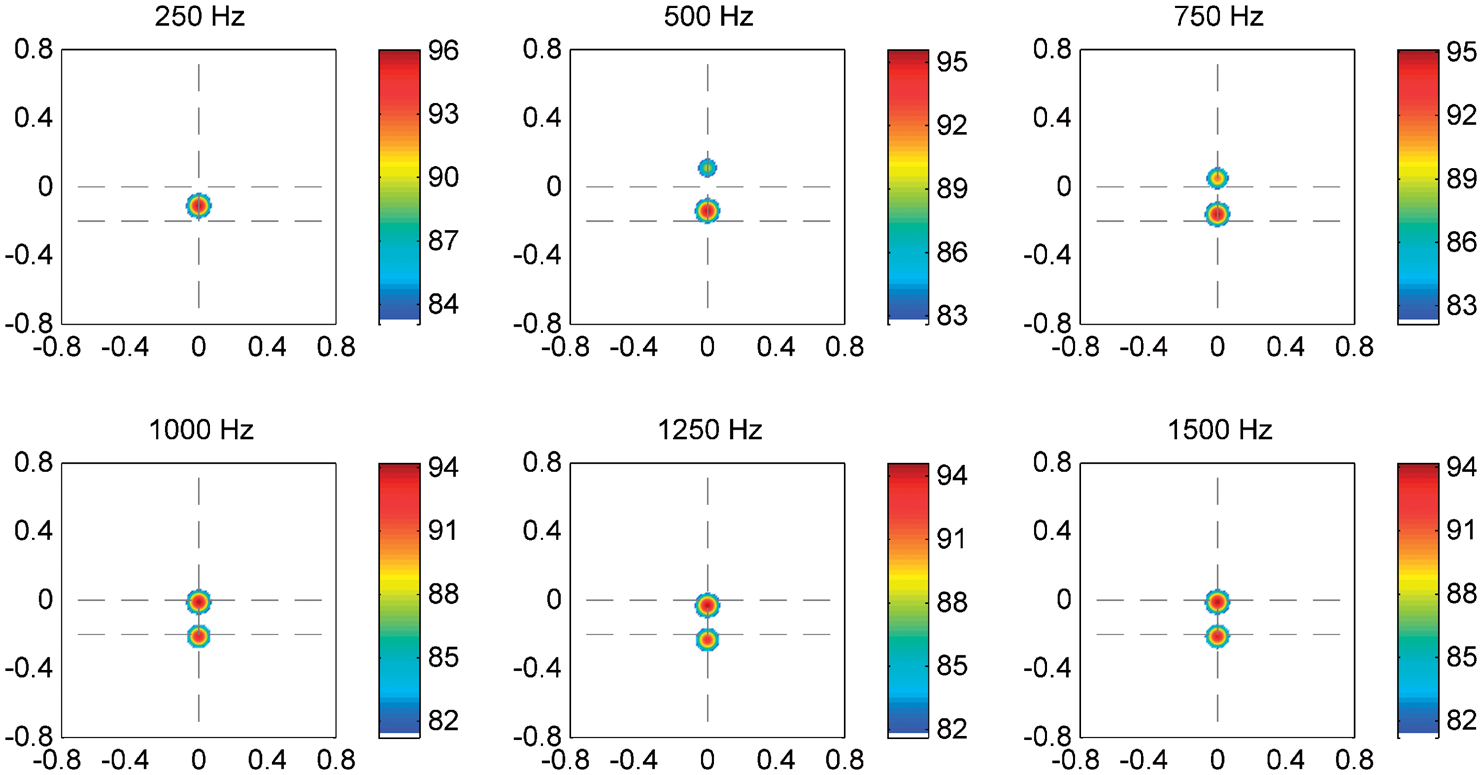
In the remaining part of this article, we consider beamforming only with the full CSM.
More than two sources
When the HR-CLEAN-SC method is applied to more than two sources, the summation in the numerator of equation (26) is done for more than one steering vector
First, a simulation was made with three sources, again on the CB results with three sources (located at dashed line intersections). CLEAN-SC results with three sources (located at dashed line intersections). HR-CLEAN-SC results with three sources (located at dashed line intersections).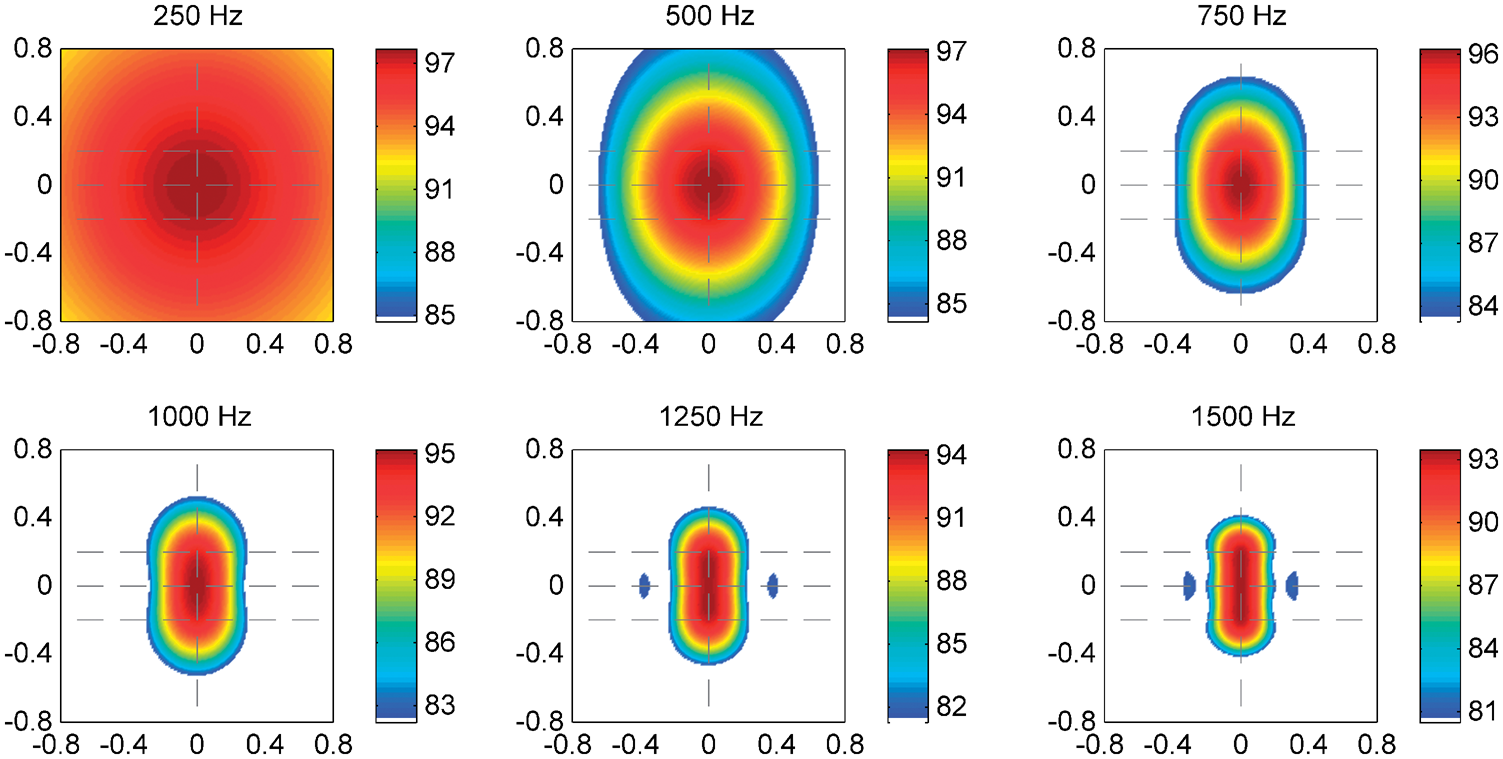
The trend of reduced added value is continued when four sources are closely spaced. This can be concluded from beamforming simulations shown in Figures 14 (CB), 15 (CLEAN-SC) and 16 (HR-CLEAN-SC).
CB results with four sources (located at dashed line intersections).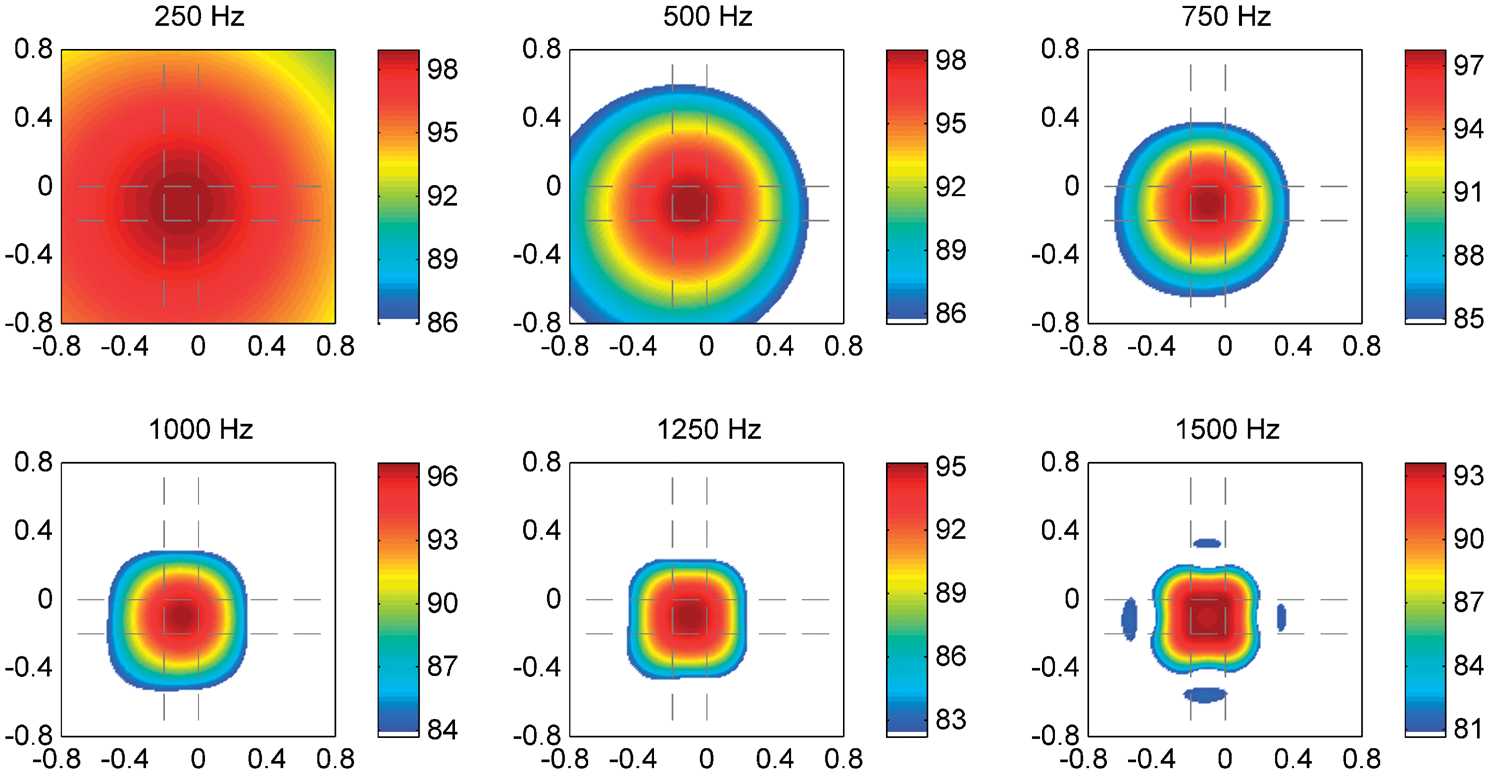
Experimental validation
Set-up
An experiment was performed in the anechoic chamber at the Faculty of Applied Sciences of Delft University of Technology (TU Delft). A 56-microphone array with a random distribution and a diameter of approximately 1 m was employed (see Figure 17). The microphones in the array are surrounded by a layer of absorption foam called ‘Flamex basic’, 15 mm thick. This avoids diffraction to a certain extent, especially for acoustic waves coming from directions close to normal, such as in this experiment. The array plane formed an angle of 4° with the vertical, which was accounted for in the microphone positions.
CLEAN-SC results with four sources (located at dashed line intersections). HR-CLEAN-SC results with four sources (located at dashed line intersections). Set-up in TU Delft anechoic chamber with array of 56 microphones and two speakers.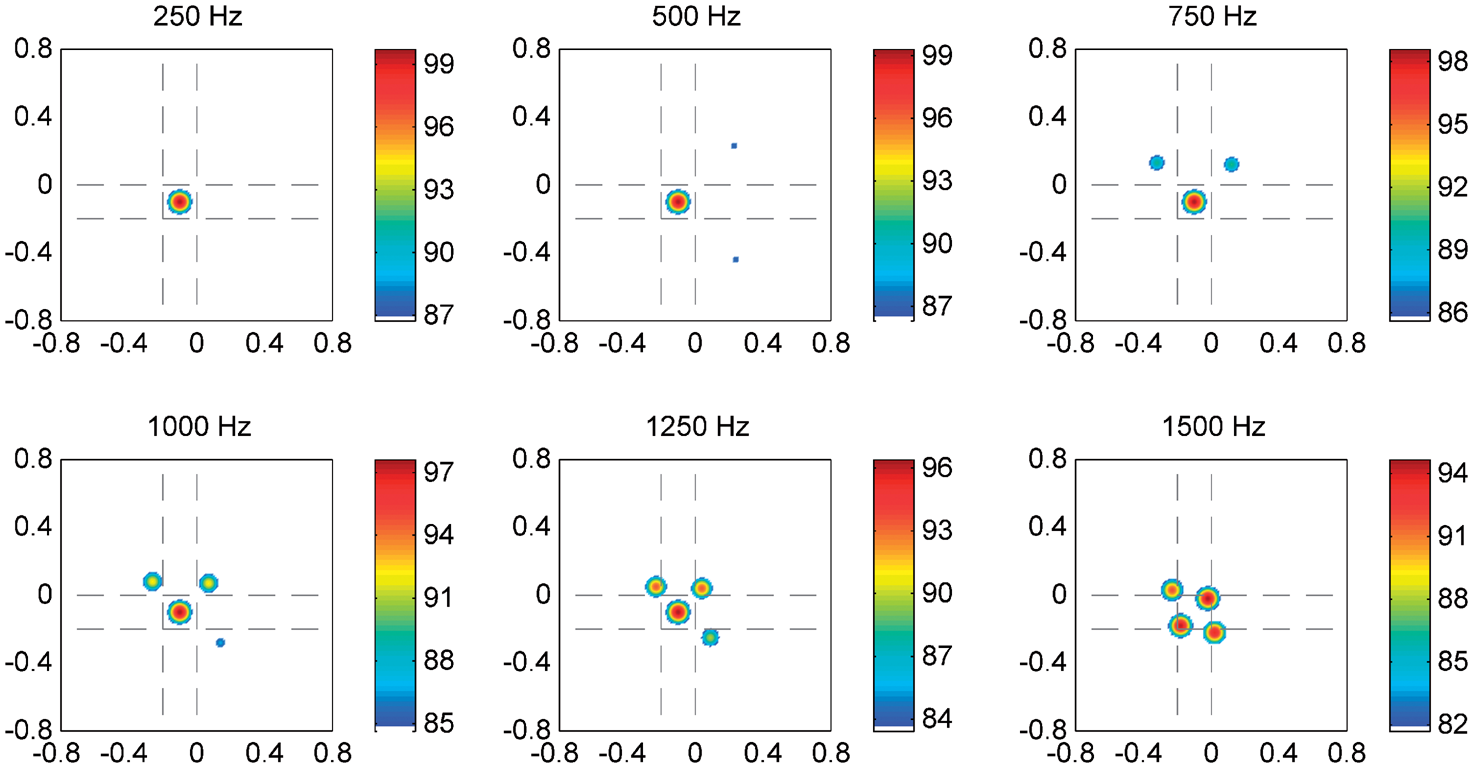
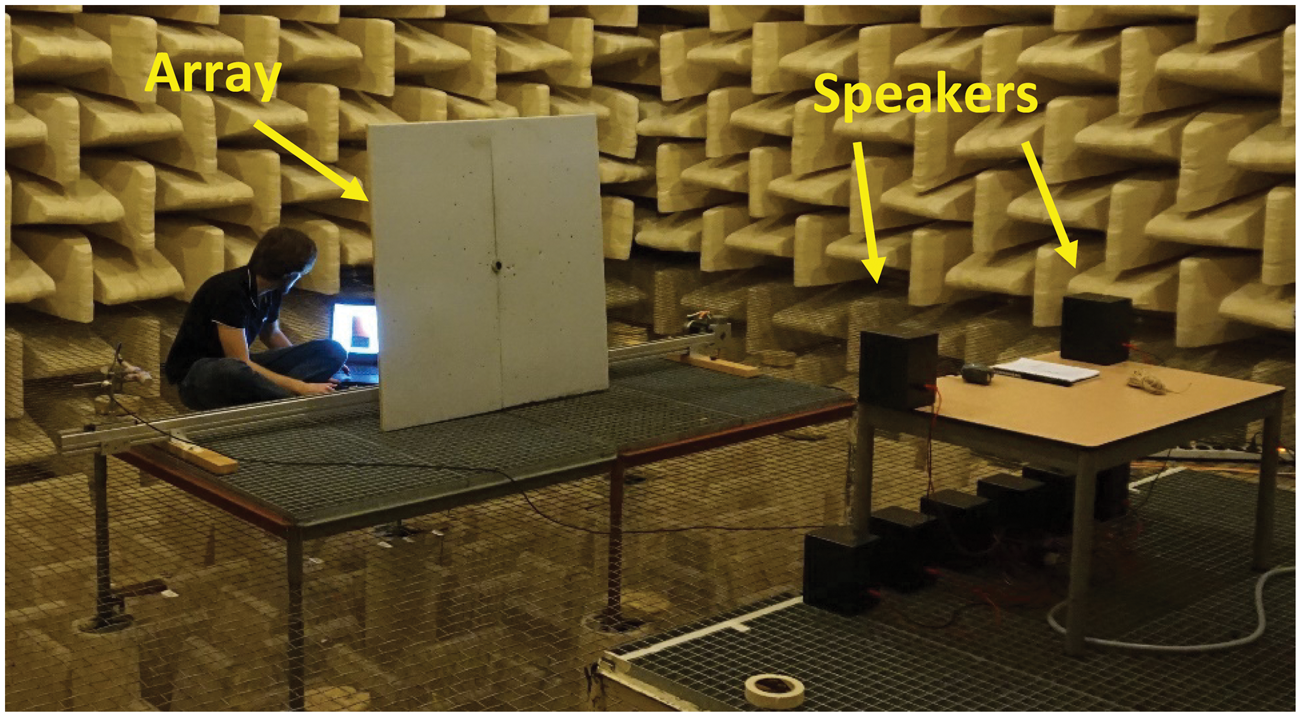
Two small speakers were located at 1.87 m from the array, at a number of different distances between each other: 12 cm, 25 cm, 50 cm and 80 cm. The speakers were placed on the table, with their baffles as far away from the table edge as possible, to avoid reflections. Tests performed with a sound level meter with and without table showed negligible differences in the sound levels measured. Thus, the influence of the table presence could be assumed negligible.
The two speakers were incoherently fed with white noise at 50 kHz sampling frequency. At each mutual speaker distance, three measurements were performed: (a) with both speakers active, (b) with only the left speaker on and (c) with only the right speaker on. When one of the speakers was turned off, the other was fed with (statistically) the same white noise signal as with both speakers on, so that beamforming results with both speakers could be compared against single speaker measurements. The recording time per measurement was 30 s, using a 50 kHz sampling frequency.
To obtain the time-averaged CSM, the acoustic data were separated into time blocks of 500 samples, yielding a frequency resolution of 100 Hz. FFT was applied with Hanning window and 50% overlap.
Results
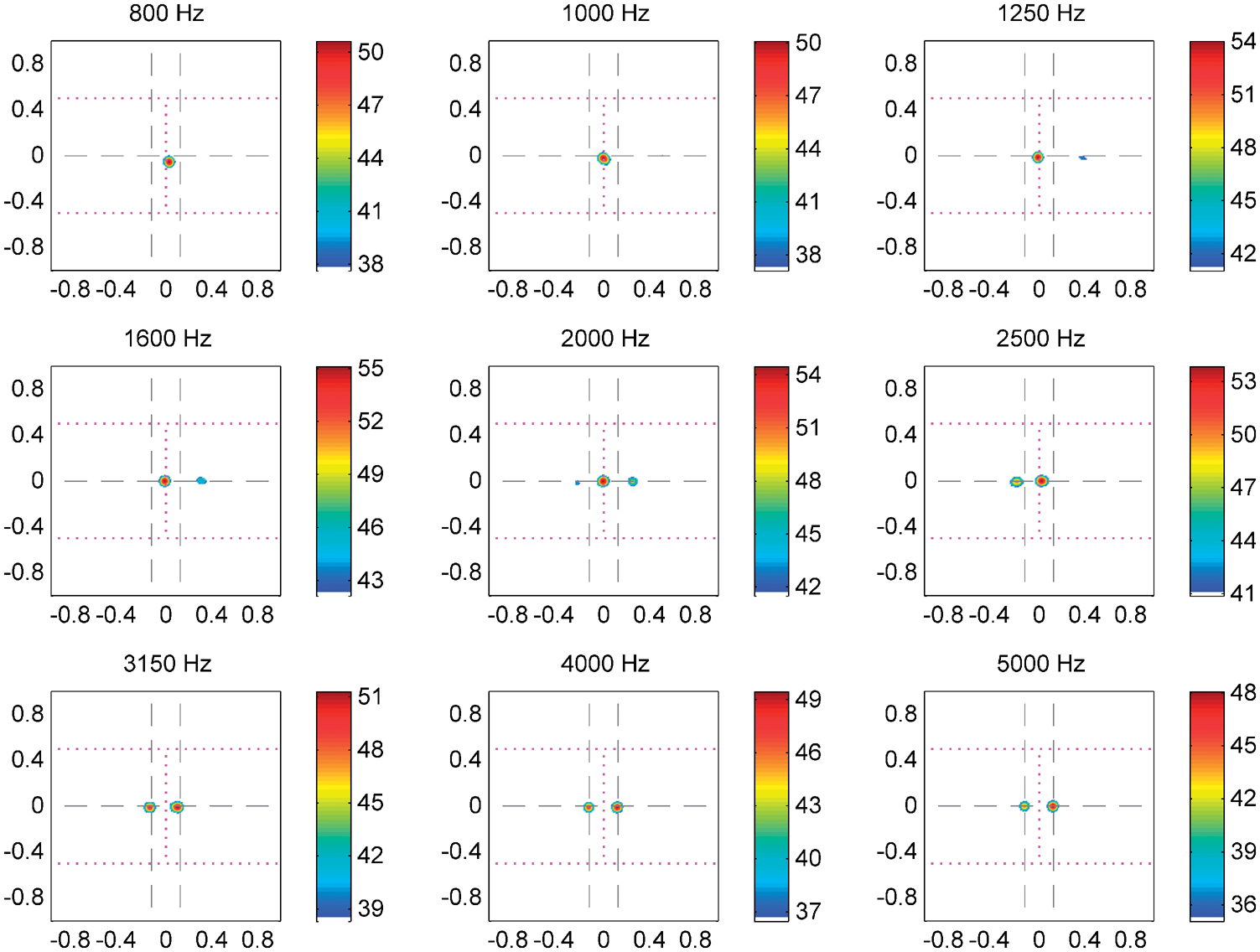
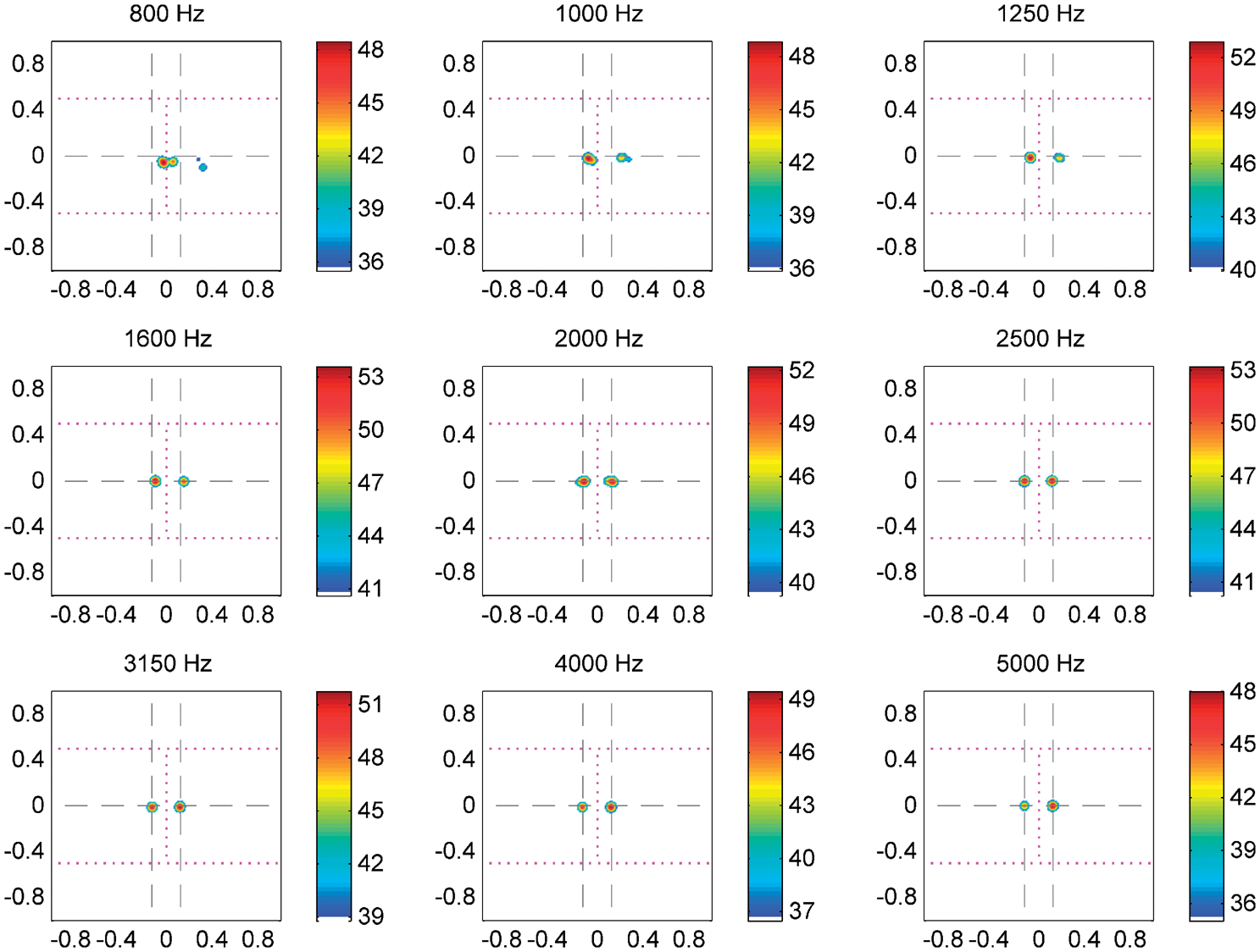
Beamforming (CB, CLEAN-SC and HR-CLEAN-SC) was applied at each narrowband frequency up to 10 kHz, and then summed up to 1/3 octave bands. HR-CLEAN-SC was applied under the same conditions as with the simulated data, mentioned in the first part of ‘Simulated array data’ section. Results with the two speakers at 25 cm separation distance are shown in Figures 18 to 20. At 25 cm separation, the Rayleigh criterion, equation (38), predicts resolvability at frequencies above 3000 Hz. This is confirmed by the CB and the CLEAN-SC results, shown in Figures 18 and 19, respectively. The HR-CLEAN-SC images in Figure 20 show significant resolution improvements at 1/3 octave band frequencies ranging from 1000 to 2500 Hz, so at frequencies considerably below the Rayleigh frequency limit. Just as for the simulations reported in ‘3D simulations’ section, a factor 2 is found for the resolution improvement, which agrees with the theoretical gain factor of 2.37, derived in Appendix 1.
CB results with two sources in anechoic chamber, at 25 cm distance; sources located at dashed line intersections; dotted lines indicate integration areas. CLEAN-SC results with two sources in anechoic chamber, at 25 cm distance; sources located at dashed line intersections; dotted lines indicate integration areas. HR-CLEAN-SC results with two sources in anechoic chamber, at 25 cm distance; sources located at dashed line intersections; dotted lines indicate integration areas.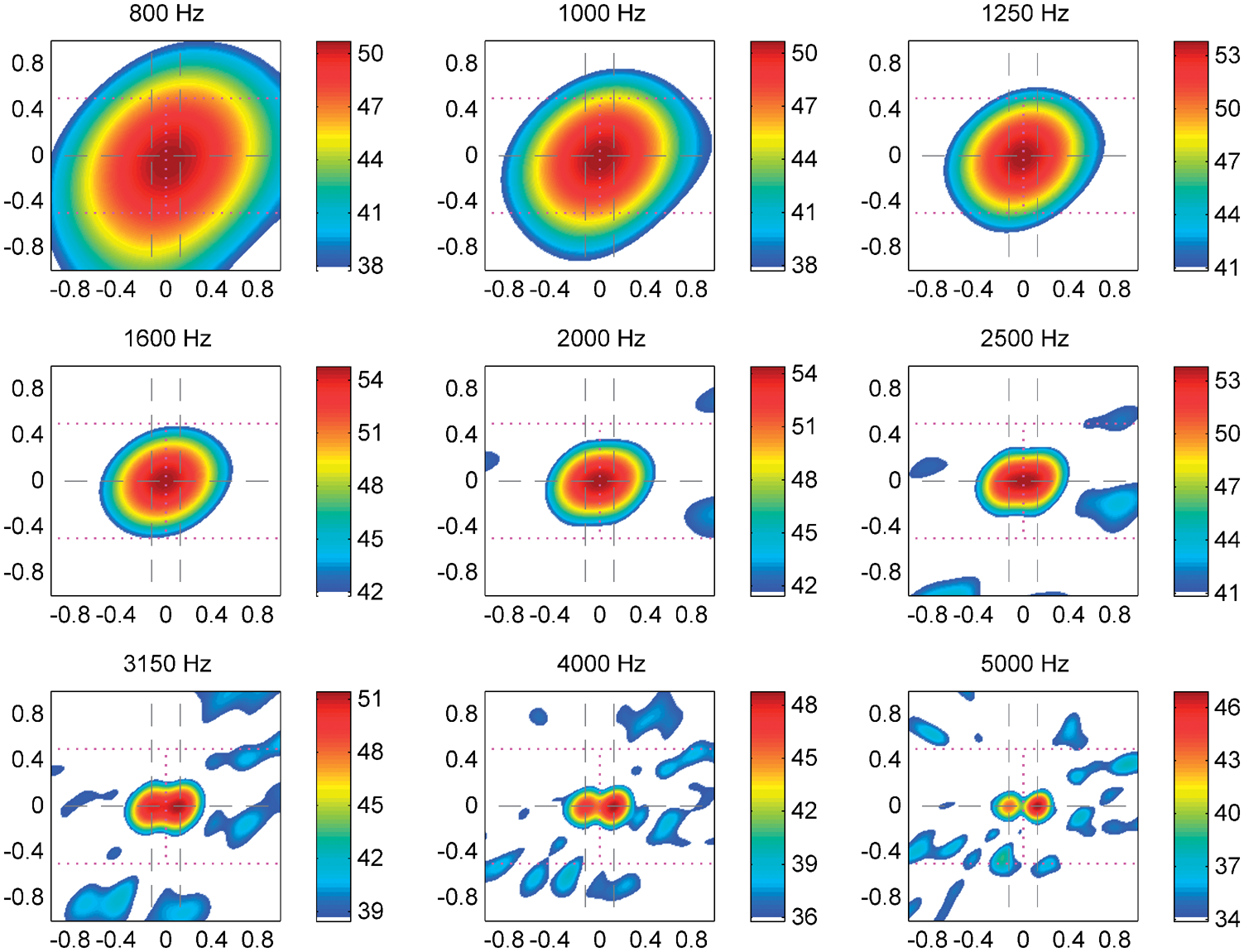
CLEAN-SC integration
7
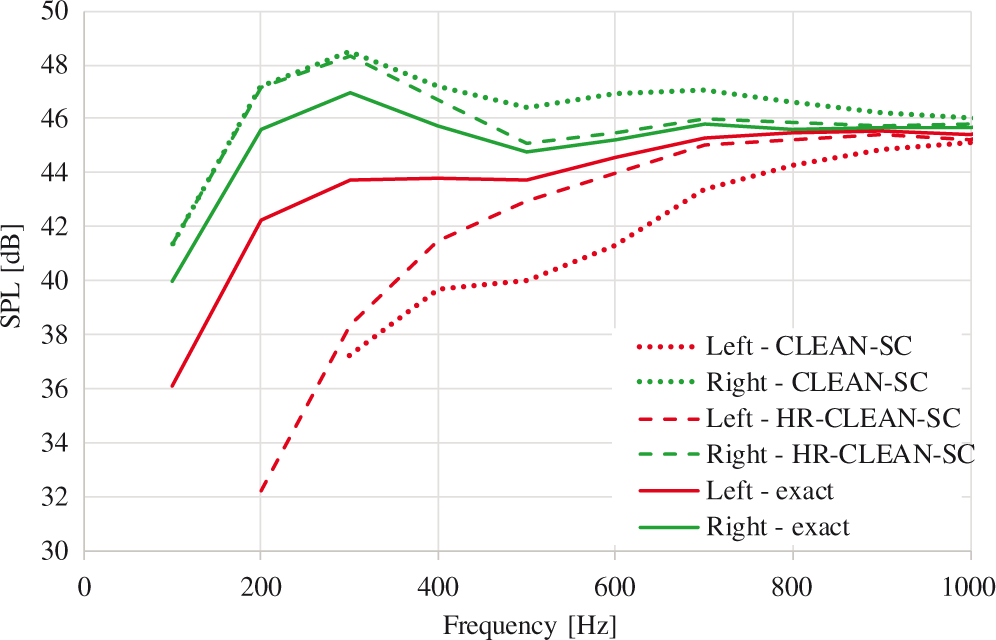
was performed on the areas within the dotted lines in Figures 18 to 20. Integrated data obtained with CLEAN-SC and HR-CLEAN-SC with both loudspeakers on were compared against single speaker integrated results, which is shown in Figure 21.
a
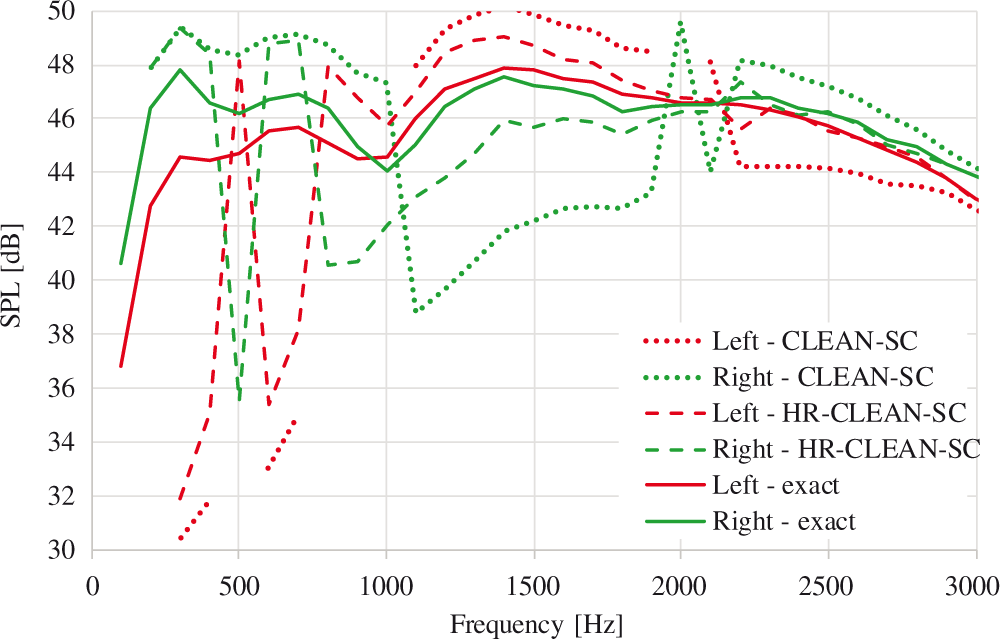
The improvement obtained with HR-CLEAN-SC is clearly visible, especially between 1000 and 3000 Hz. See also the zoomed plot, Figure 22. However, the factor 2 is not entirely confirmed: the HR-CLEAN-SC results at 1500 Hz are worse than the CLEAN-SC results at 3000 Hz. Note that HR-CLEAN-SC also outperforms standard CLEAN-SC at high frequencies, thanks to the freedom in choosing the marker locations.
CLEAN-SC and HR-CLEAN-SC integrated results with two sources in anechoic chamber, at 25 cm distance, compared against ‘exact’ single speaker measurements. Zoomed version of Figure 21.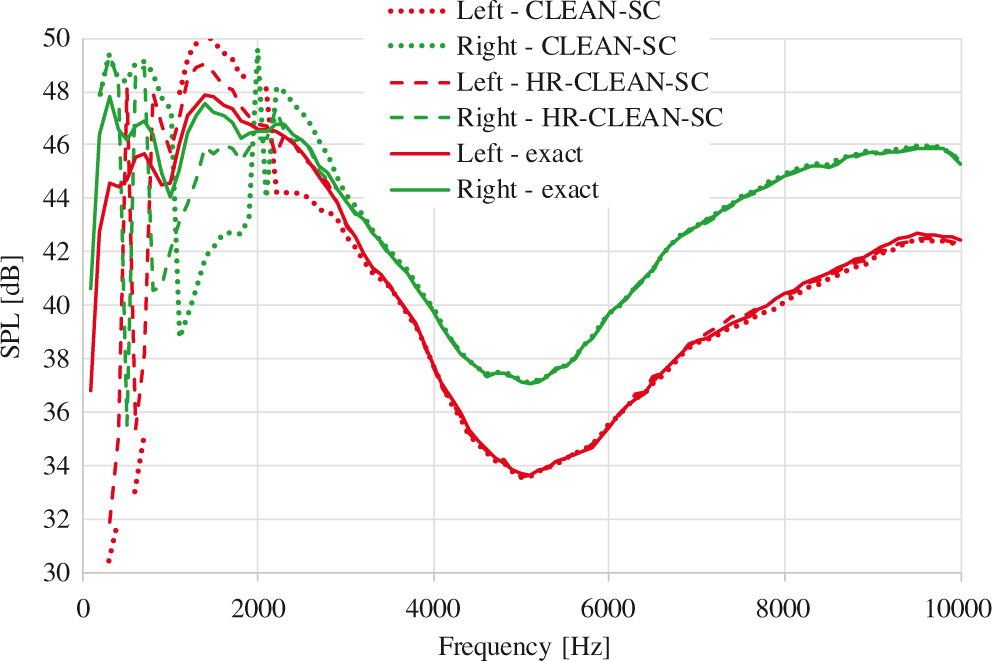
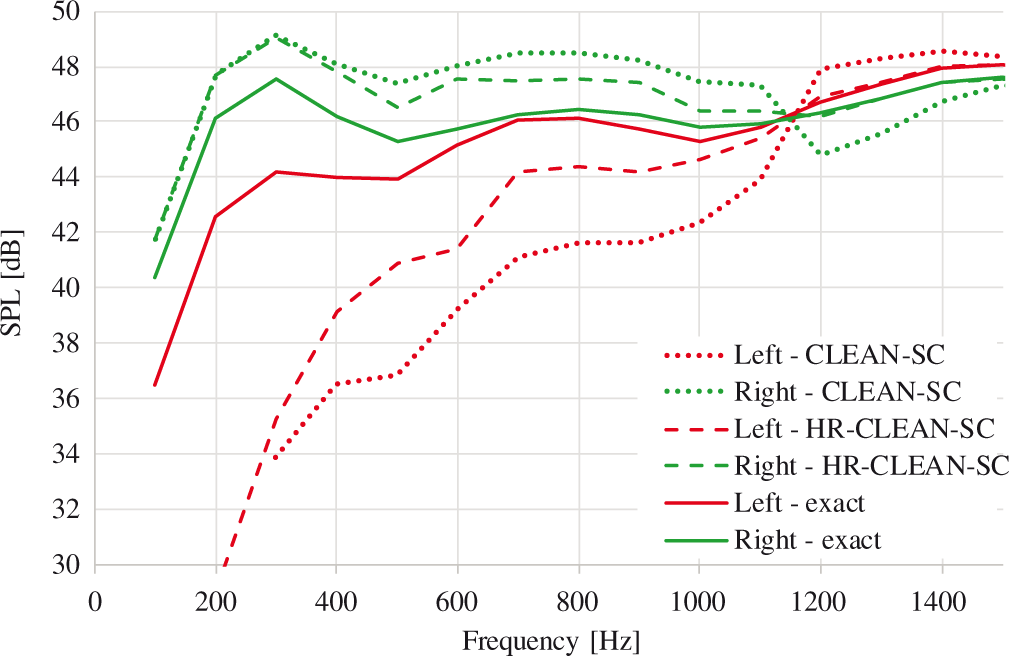
Similar results were found at other speaker distances. The results are summarised in Figures 23 (12 cm), 24 (50 cm) and 25 (80 cm). Each plot has its own range of frequencies. Note that there is always a trade-off in the spectra: if the right speaker level is underpredicted, then the left speaker level is overpredicted and vice versa. The total level is predicted correctly.
CLEAN-SC and HR-CLEAN-SC integrated results with two sources in anechoic chamber, at 12 cm distance, compared against ‘exact’ single speaker measurements. CLEAN-SC and HR-CLEAN-SC integrated results with two sources in anechoic chamber, at 50 cm distance, compared against ‘exact’ single speaker measurements. CLEAN-SC and HR-CLEAN-SC integrated results with two sources in anechoic chamber, at 80 cm distance, compared against ‘exact’ single speaker measurements.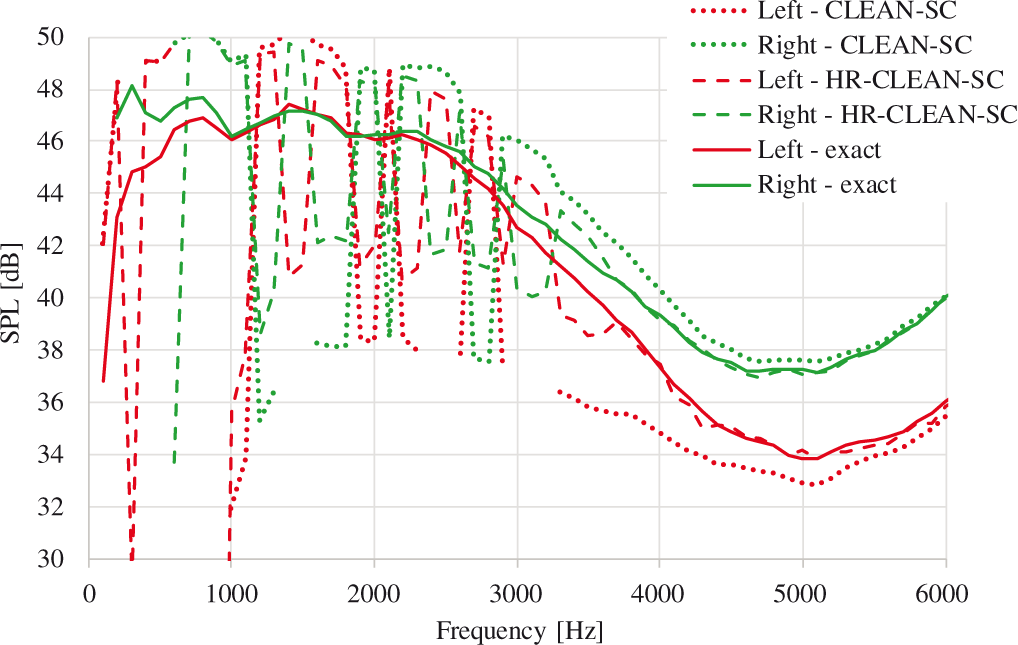
Conclusions
The HR-CLEAN-SC method, proposed in this article, is a high-resolution extension of CLEAN-SC. It is particularly suitable for pairs of closely spaced sources. Then the spatial resolution can be increased by, typically, a factor of 2. The features of the standard CLEAN-SC method are fully preserved. For beamforming applications with many sources (e.g. airframe noise measurements in wind tunnels), HR-CLEAN-SC is not expected to give much added value.
Obviously, HR-CLEAN-SC needs more computation time than CLEAN-SC. However, the most time-consuming part, which is CB at the start of the iteration process, does not need to be done more often. Consequently, when only a few CLEAN-SC iterations are needed, i.e. when the number of sources K is small, the additional computation time is limited.
HR-CLEAN-SC can be applied with and without removal of the CSM diagonal. In both cases, significant increase in resolution is found compared to the standard CLEAN-SC method. Without CSM removal, i.e. with the full CSM, the best results are obtained. When it is necessary to remove the diagonal, HR-CLEAN-SC may benefit from reconstruction methods. 10
The features of HR-CLEAN-SC were demonstrated with synthesised 2D and 3D array measurements. Experimental validation was done by measurements with two loudspeakers in an anechoic chamber.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.