
Abstract
Anti-disturbance control problem is studied for ship dynamic positioning systems with model uncertainties and ocean disturbances under thruster faults. For the ocean disturbance, a stochastic disturbance observer (SDO) is established to give the online estimation. For thruster faults, an adaptive law is used to evaluate, which is obtain from Lyapunov function. For model uncertainties, a robust control term with adaptive technology is used to attenuate it. Then, a composite anti-disturbance control (CADC) strategy is raised by combining disturbance observer-based control (DOBC), adaptive technology, and robust control term, which makes the position and yaw angle of ship reach the desired values. Finally, the simulation example proves the validity of the controller.
Keywords
Introduction
The dynamic positioning (DP) can keep the ship in a predetermined trajectory in the presence of external environmental disturbance.1–3. For unknown constant disturbance, a nonlinear set-point-regulation controller was proposed using a port-Hamiltonian framework. 4 Considering the second-order wave forces, a proportion-integration-differentiation controller was given based on fuzzy rules. 5 An observer is designed to estimate the ocean disturbances influencing in systems DP ships. 6 As we all known that, in many results only the influence of external disturbance are considered on DP ships.
In fact, there are various disturbances at sea level, thus it is necessary to study the anti-disturabnce control for DP systems with multiple disturbances.7,8 Yet conventional anti-disturbance control is conservative in the attenuation of multiple disturbances, in this cases, the composite hierarchical anti-disturbance control (CHADC) strategy was presented, which has advantages of high control precision and strong robustness.9–12 Considering modeling uncertainty and marine environmental disturbance, a composite control method is raised by combining DOBC and
Thruster faults will appear inevitably when ships sailing on the sea for a long time, which will degrade system performance, reduce the DP accuracy, and even make the DP system unstable, thus, it is essential to study the fault diagnosis of ships to improve the reliability of the DP systems.16–18 Under the condition of the fault type and upper bound are known, the dynamic positioning was realized for ships with disturbances. 19 In Su et al., 20 the asymptotic stability of DP ships with actuator constraints was addressed, whereas the external environmental disturbances is not considered. Considering the dynamic positioning ship with thruster faults, a dynamic surface control method based on fault state observer is proposed, which lacks the ability to deal with disturbances. 21
In this paper, the problem of anti-disturbance control for DP ship systems with model uncertainties and ocean disturbances under thruster faults is researched. A composite anti-disturbance control strategy is proposed to make all states of DP ships asymptotically bounded in mean square, such that the desired position and heading can be achieved. The main contributions are as follows:
The DP system of ships with ocean disturbances, model uncertainties, and thruster faults are considered concurrently, the model uncertainties and thruster faults are unknown and norm bounded. In addition, the ocean disturbance is generated by an external system with stochastic term.
A stochastic disturbance observer is established to compensate the ocean disturbance, an adaptive algorithm-based robust control term is designed to suppress the model uncertainties, as well as the thruster faults are estimated by using adaptive technology. On these basis, a composite anti-disturbance controller is constructed to ensure that the states of system are asymptotically bounded in mean square.
Mathematical modeling of ships
Two coordinate frames are defined to describe the ship motion, as represented in the Figure 1. The dynamic positioning of ship’s mathematical model is given as follow 22


where

which satisfies

where
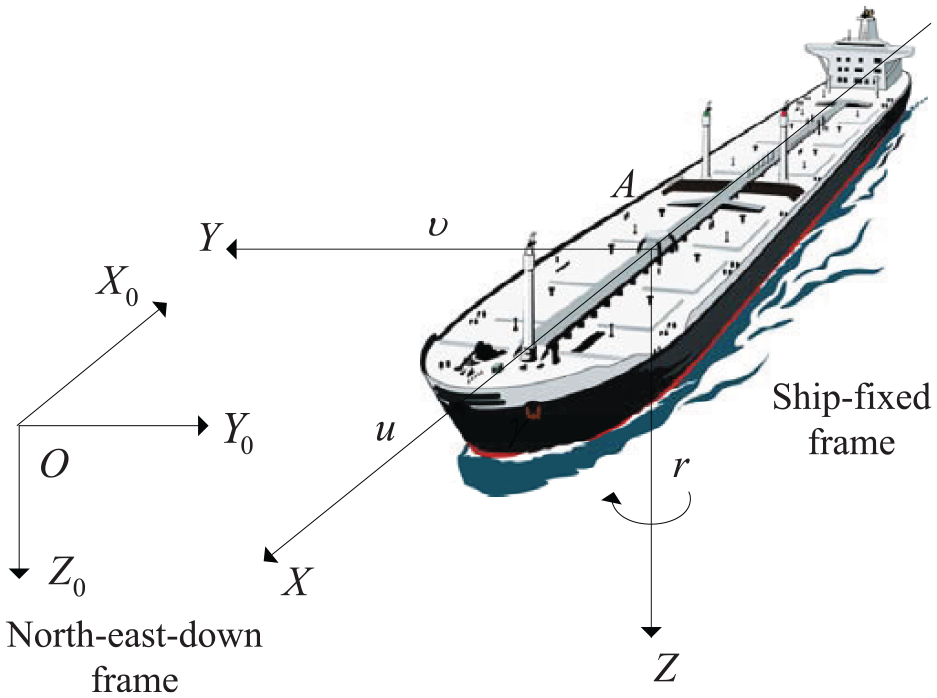
North-east-down and ship-fixed coordinate frames. 22
Based on Fossen and Strand,
23

where
The ship has uncertainty in dynamic modeling, which is shown as follows

where
Let

Based on Wang and Han,
24
the yaw angle

The DP system is expressed as
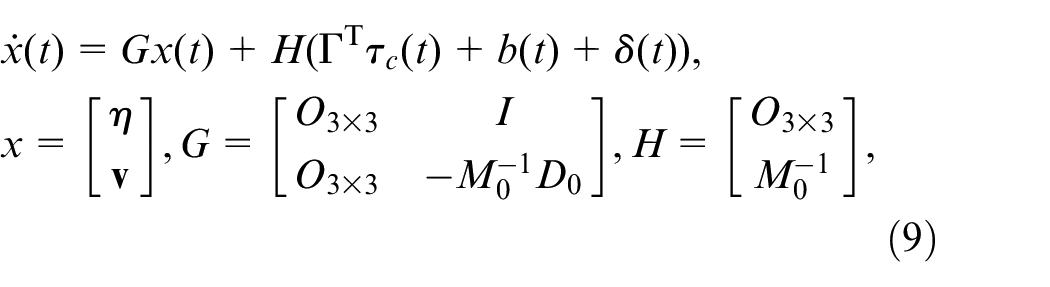
where

If


for

for
According to Øksendal,
26
by replacing


based on Hu,
27
Hu et al.,
28


Design of observers and controller
Supposing
Stochastic disturbance observer (SDO)
The SDO is given as
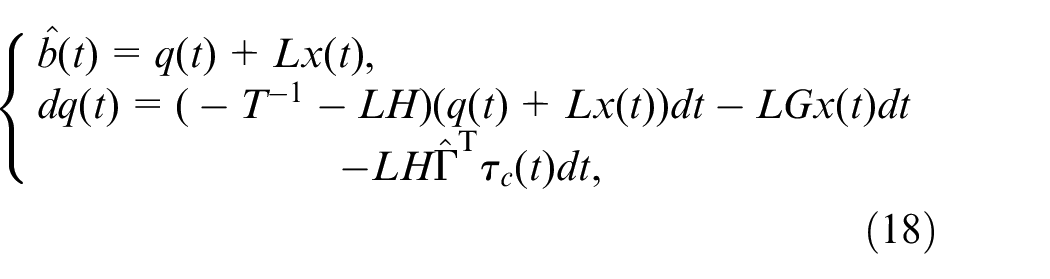
where
Define the disturbance estimation error as

Composite anti-disturbance control (CADC)
The CADC strategy is put forward in order that the system (14) is asymptotically mean-square bounded.
To repress the modeling uncertainty (7), the adaptive law-based robust control term


Here,
Considering the SDO (18) and robust control term (20), the composite controller is devised as follows

where
On the basis of (22), one has
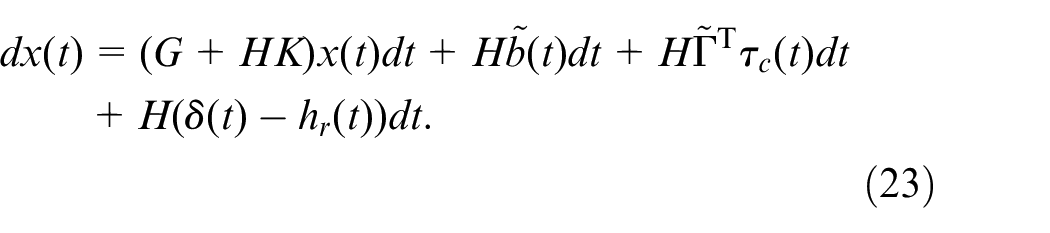
Combining (19) and (23), then

where
The following results can be obtained through the stability analysis for the system (24).


where
and the adaptive law satisfies

then all states of system (24) are asymptotically mean-square bounded by adjusting the gain

and

the derivative of (29) is
It can be obtained from Young’s inequality
According to
According to (28), we get
From (32)-(34), it is obvious that

where
Our main results are as follows:
(1):
with

(2):
here


(3):
So, one has
When

Based on (29), (35), and (38), choosing

That is

and

In the light of Lemma 1, system (24) is asymptotically mean-square bounded.
The next step is considered the problem of regional pole constraints.
On account of Lemma 2, by selecting the symmetric positive definite matrix


where
Pre-multiplying and post-multiplying by


where
That is, if (26) and (27) hold, the characteristic values of
That is to say, the proof is done.
Simulation examples
Taking Northern Clipper with mass of




Selecting
Based on Theorem 1, one has







The initial values and design control parameters are the same as case 1. In Figures 2 to 4, Figures 2 to 4(a) is the ship’s trajectory from initial position
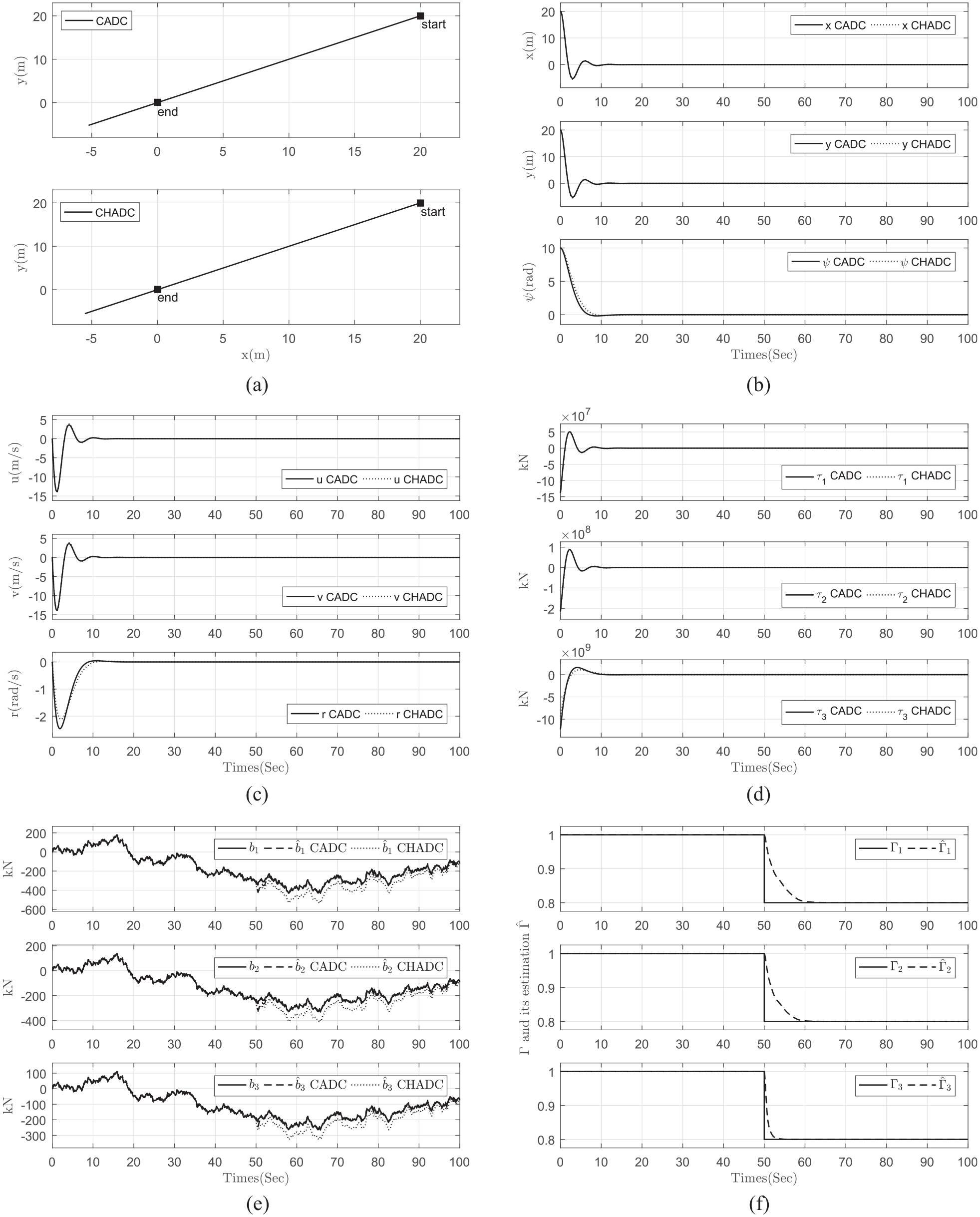
Simulation results under CADC and CHADC for case 1: (a) trajectory of the ship in plan-
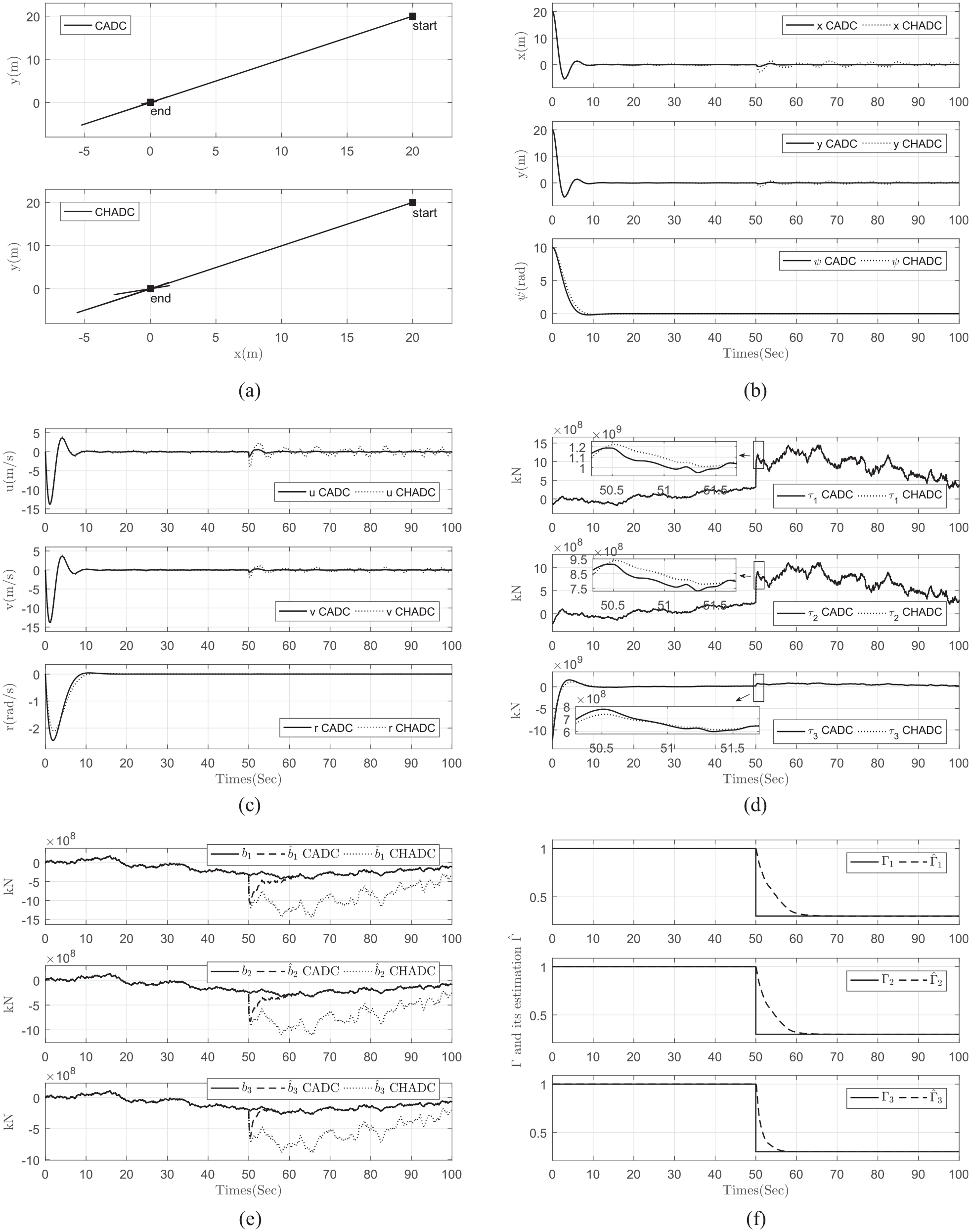
Simulation results under CADC and CHADC for case 2: (a) trajectory of the ship in plan-
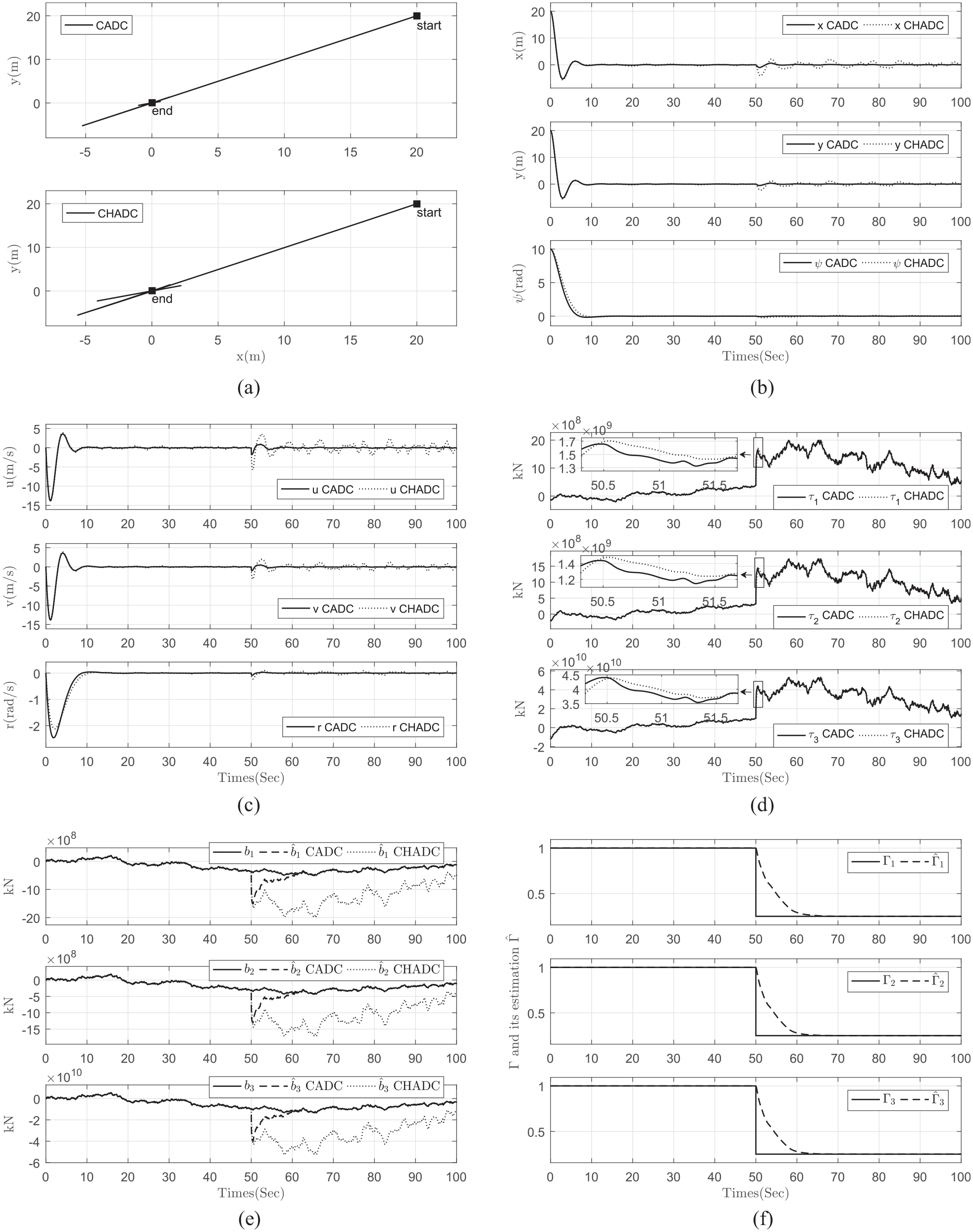
Simulation results under CADC and CHADC for case 3: (a) trajectory of the ship in plan-
Performance indices under
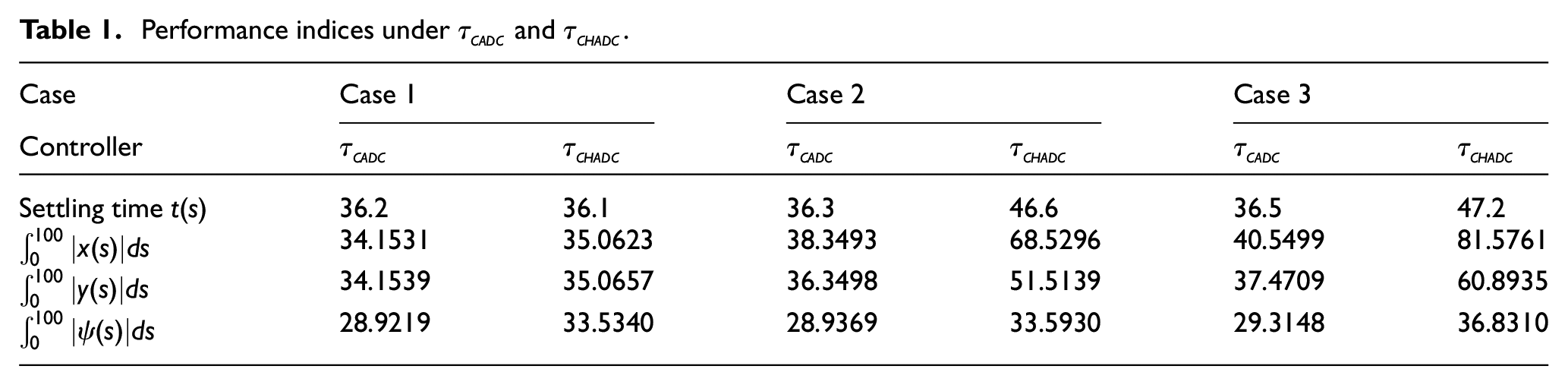
In Figures 2(a) and 3(a), it is shown that the CADC can make the ship stay in desired position
Conclusions
For the dynamic positioning ship systems with ocean disturbances and modeling uncertainties under thruster faults, an adaptive law-based SDO is raised to evaluate the disturbances and faults simultaneously. Based on the estimation, the CADC strategy is put forward by using disturbance observer-based control, robust control term and adaptive technology to make the closed-loop system asymptotically mean-square bounded at the same time. The controlled ship can stay in desired position and maintain a fixed attitude. The next work in the future is the anti-disturbance control for the dynamic positioning ship systems with multiple disturbances and thruster faults under input saturation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China 61973149 and 62273172, the Key Project of Natural Science Foundation of Shandong Province ZR2020KF029, the Outstanding Youth Innovation Team Project of Shandong Higher Education Institution 2021KJ042.