
Abstract
The World Harmonized Steady Cycle (WHSC) and the World Harmonized Transient Cycle (WHTC) are used to simulate the real driving conditions of a vehicle, which provides an opportunity for researchers to predict engine emissions through the use of models and thus investigate engine emission technologies or technology optimization to meet regulations. In this study, a Back-Propagation neural network (BPNN) is used to build an engine NOx prediction model, determine the number of nodes in the hidden layer, and optimize its weights and thresholds using the Pelican Optimization Algorithm (POA). NOx emissions from diesel engines are predicted by using the WHTC. The results show that the proposed model has a high R coefficient value of 0.9641. The results of the cold WHTC cycle NOx emission prediction shows that the mean absolute error (MAE) for the three cycles is about 32–35 ppm. The MAE was approximately 2.8% of the maximum NOx emissions in all cycles. These results indicate that the model has high accuracy in predicting transient NOx emissions.
Introduction
Diesel vehicles have become inseparable from people’s daily life, but the main pollutant emissions of diesel engines, nitrogen oxides (NOx) and particulate matter (PMs) has become a great danger to human health and natural environment.1–3 The nitrogen oxides in car exhaust react with hydrocarbons by ultraviolet light to form toxic smog, which is called photochemical smog. Photochemical smog has a specific odor, irritates the eyes, harms plants, and reduces atmospheric visibility. 4 In addition, nitric and nitrous acids, formed by the reaction of nitrogen oxides with water in the air, are the main components of acid rain.5,6 Nitrogen oxides can irritate the lungs, making it harder for people to fight respiratory illnesses like colds. For children, nitrogen oxides may cause impaired lung development. Studies indicate that long-term inhalation of nitrogen oxides may lead to changes in the structure of the lungs. 7
In order to reduce diesel engine emissions, countries around the world have been implementing increasingly stringent emission regulations. The most current approach to reducing NOx emissions is the use of exhaust gas recirculation (EGR) and selective catalytic reduction (SCR) technology.8–10 Although this combination of technologies can reduce NOx emissions to a great extent, reducing raw engine NOx emissions is also essential for diesel vehicles to meet emission regulations. High-accuracy prediction of NOx emissions can not only contribute to the reduction of NOx emissions, but also have a positive impact in the use of models to study the optimization of SCR urea injection.
In order to obtain a predictive model for NOx emissions, Tauzia et al. 11 conducted the first specific tests on an engine test stand to evaluate the effects of oil and coolant temperatures on combustion and pollutant emissions, on the basis of which a new 0D semi-physical model was proposed to calculate engine emissions of nitrogen oxides. d’Ambrosio et al. 12 developed a control-oriented semi-empirical model for the calculation of NOx emissions from diesel engines with an R coefficient value of 0.98 and an RMS of 0.021 mg/cyc·cyl and evaluated it for two engines with different injection systems. Alcan et al. 13 used a Sigmoid-based non-linear autoregressive and exogenous input model to predict NOx emissions for a given input set under steady-state and transient cycles. However, the accuracy of the steady-state and transient validation was low, at 80% and 70%, respectively. Alcan et al. proposed a non-linear ARX structure with a reduced amount of non-linear regression to model NOx emissions from diesel engines. The experimental results show that NOx emissions can be modeled with high validation performance. 14 Mohammadi and Neshat investigated the interaction between NOx and ion flow in a diesel engine cylinder. A thermodynamic multi-zone model was used for diesel engine simulations. An improved chemical kinetic mechanism was applied to the simulation of diesel oxidation. 15 However, the NOx generation mechanism is too complex to provide accurate predictions of NOx emissions using only NOx-related ion reactions. Gu et al. proposed a 0D multiphase combustion model for direct injection diesel engines for predicting the heat release rate at full load. Based on the accurate prediction of heat release rate, a NOx calculation method was proposed and tested based on the combustion zone temperature. 16 However, the NOx prediction accuracy is overly dependent on the prediction accuracy of the heat release rate, and the NOx prediction error is too large under some steady-state operating conditions, and the model accuracy is not verified under transient operating conditions. Lughofer et al. 17 proposed an alternative to conventional NOx prediction models by training fuzzy models representing static and dynamic operating modes directly from measured data. However, for new engines, the models take a lot of time to re-tune and in the worst case even require a re-development phase. Arsie et al. used least squares technical features to adjust the output of a fast NOx virtual sensor, taking into account the effects of engine aging, production diffusion and component drift. The proposed method relies on a simple but reliable multiple linear regression for the prediction of NOx emissions. 18 In order to accurately describe the transient emissions of motor vehicles, Wei et al. used a super learner model to construct a NOx transient emission model. The R2 value for NOx emissions from the validation vehicle test data was 0.82. 19 Due to the use of data from different vehicles for modeling, the model was only able to capture the general pattern of vehicle transient emissions and had a low prediction accuracy for NOx.
NOx has a very complex generation mechanism. Considering only a certain generation phenomenon or simplifying the NOx generation process will inevitably reduce the accuracy of NOx prediction. Artificial Neural Network (ANN) is a hot research topic emerging in the field of artificial intelligence. It is a computing model that simulates the neuronal network of the brain from the perspective of information processing and consists of a large number of interconnected nodes. 20 Because of its strong generalization ability, neural network is widely used in the automotive field, including engine modeling, vehicle electronic control, and diagnostic systems.21,22 BPNN have the ability to realize any complex nonlinear mapping and are particularly suitable for solving problems with complex internal mechanisms. In the practical application of neural networks, most of them used are BPNN, but BPNN also have insurmountable limitations. The main realization is the sensitivity of the initial weights and thresholds, BPNN use a new way such as iteration to determine the weights thresholds, so an initial value is needed. The general initial value is given randomly, which is likely to cause the non-repeatability of the neural network, the initial value is too large or too small will have an impact on the performance of the neural network. In most of the modeling processes using BP neural networks, the effects of initial weights and thresholds on the model are often ignored.
To solve the above problems, this study proposes a novel optimization method based on the Pelican Optimization Algorithm (POA), where the objective parameters of optimization are the weights and thresholds in the BP neural network. And the optimized BPNN model is used to predict the NOx emission under transient cycle WHTC of diesel engine under cold start. The optimized model can not only be used to predict NOx emissions under transient conditions, but also has a high prediction accuracy. And because the initial weights and thresholds of the model are determined, the model is made reproducible.
Methodology
Most of the optimization methods currently used for initial weights and thresholds of neural networks are manual search, grid search, and random sampling.
Manual search relies too much on subjectivity, and empirical search results do not guarantee that the best parameters will be obtained. Grid search, that is, the parameters are adjusted sequentially in steps within a specified range of parameters. However, if the optimal parameter values are between two delineated grid points, again there is no guarantee that the optimal parameter values will be obtained. Random sampling likewise does not guarantee an optimal solution in each parameter dimension. In order to find the optimal neural network parameters, a BPNN model based on the Pelican Optimization Algorithm is proposed in this study to predict the transient NOx emissions from diesel engines.
The Pelican Optimization Algorithm (POA) was proposed by Pavel Trojovský and Mohammad Dehghani. The behavior and strategy of pelicans during hunting is an intelligent behavioral process that makes this bird a skilled hunter. The main inspiration for the design of the pelican optimization algorithm comes from this behavioral process, simulating the natural behavior of pelicans during hunting. 23
The main advantage of POA is to initially randomize all parameters to be optimized (population members), and the optimal solution of each parameter obtained will be saved in the set of optimal solutions and participate in the next iterative process until the set of optimal solutions for all parameters to be optimized is found. The specific optimization process is:
The population members are randomly initialized using equation (1) based on the lower and upper bounds of the optimization parameters.

where
In the Pelican Optimization Algorithm, the population can be represented by the following matrix:
where
Each
where
In order to make the Pelican Optimization Algorithm can scan the search space and thus exploit the exploration ability of the Pelican Optimization Algorithm in different regions of the search space. A parameter

where
In the Pelican Optimization Algorithm, the updated population members are accepted if the objective function value is improved at the updated position. This process can be described in equation (5).

where
In addition to make the Pelican Optimization Algorithm converge to a better position and increase the local search ability of the Pelican Optimization Algorithm to get better optimization results, it is necessary to check the region near each

where
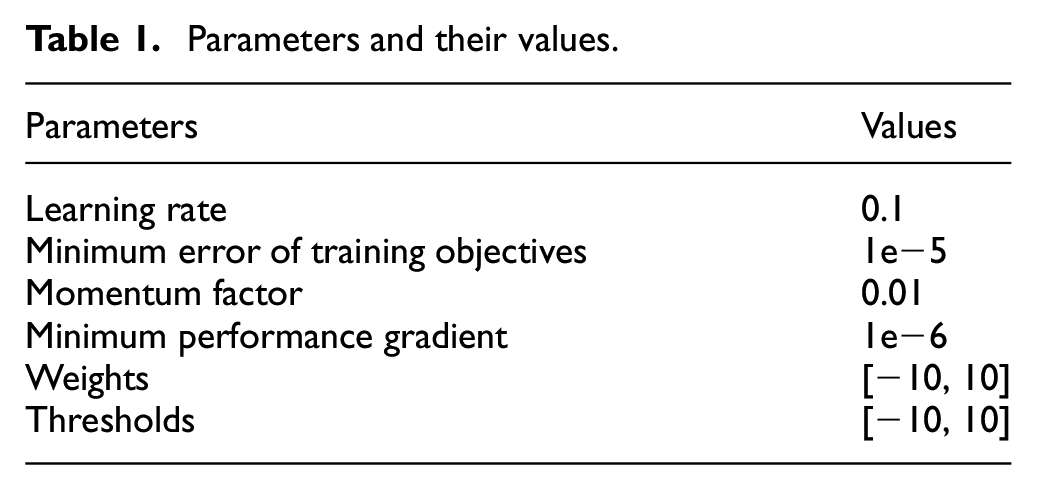
The target parameters for BPNN optimization are the number of hidden layer nodes, the weights from the input layer nodes to the hidden layer nodes, the weights from the hidden layer nodes to the output layer nodes, the thresholds for the hidden layer nodes, and the thresholds for the output layer nodes. In this study, lower and upper limits for the number of hidden layer nodes of the neural network are set, and for each number of hidden layer nodes, a pelican optimization algorithm is introduced to automatically optimize the ownership values and thresholds of the BPNN. Because BPNN has a simpler structure compared to other neural networks, and other parameters have less influence on the model, these parameters are set using fixed or empirical values. All the parameters and their values are shown in Table 1. For the range of weights and thresholds to be optimized, too large or too small an initial value can have an impact on performance. The initial value is usually defined as a small non-zero random value with empirical values between (−2.4/F, 2.4/F) and (−3/
Parameters and their values.
When constructing the neural network model, the rotational speed of the diesel engine and the fuel injection rate are the most important input parameters as the input layer. Secondly, the engine is equipped with an EGR system, and the EGR rate and exhaust gas temperature have a direct effect on NOx emission as one of the important input parameters. Since the engine is equipped with exhaust gas turbocharging system, its intake system directly affects the oil-air mixing in the cylinder under transient conditions, which has a great impact on the emissions, so the intake temperature and intake pressure are also used as input parameters of the neural network. In addition, the injection parameters (rail pressure, injection timing) have a large impact on the in-cylinder combustion and are also taken into account.
Thus there are eight engine parameters were used as inputs to the BPNN model, they are injection mass, engine speed, EGR rate, injection timing, rail pressure, intake air temperature, intake pressure, and exhaust temperature. The raw NOx emission of the engine is defined as the output of the model. the structure of the BP neural network is shown in Figure 1.
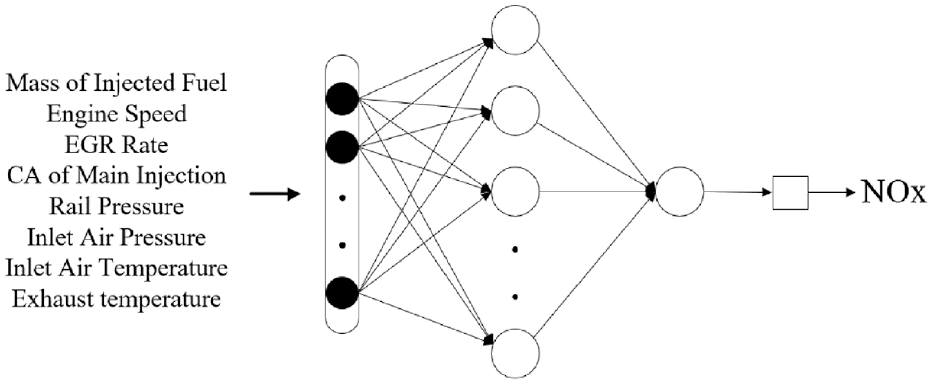
Neural network structure.
Experiment and data processing
Table 2 shows the specifications of the 3 L four-cylinder diesel engine with supercharged intercooling used in this study. The bench test was conducted using a Dynas3 electric dynamometer to control the speed and torque of the diesel engine, and NOx in the diesel exhaust was collected and measured by a HORIBA MEXA-ONE gas analyzer. Engine fuel consumption was measured by AVL735. Other data such as engine performance and emissions are displayed and saved in real time through the STARS system. Figure 2 shows a diagram of the experimental setup. The NOx prediction model was built in MATLAB 2020a.
Engine specification.
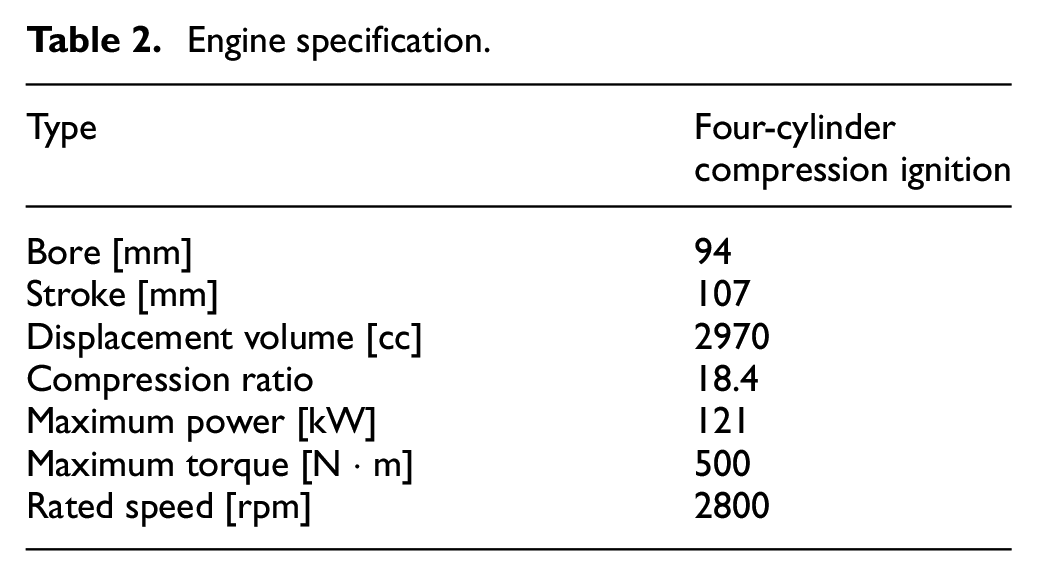
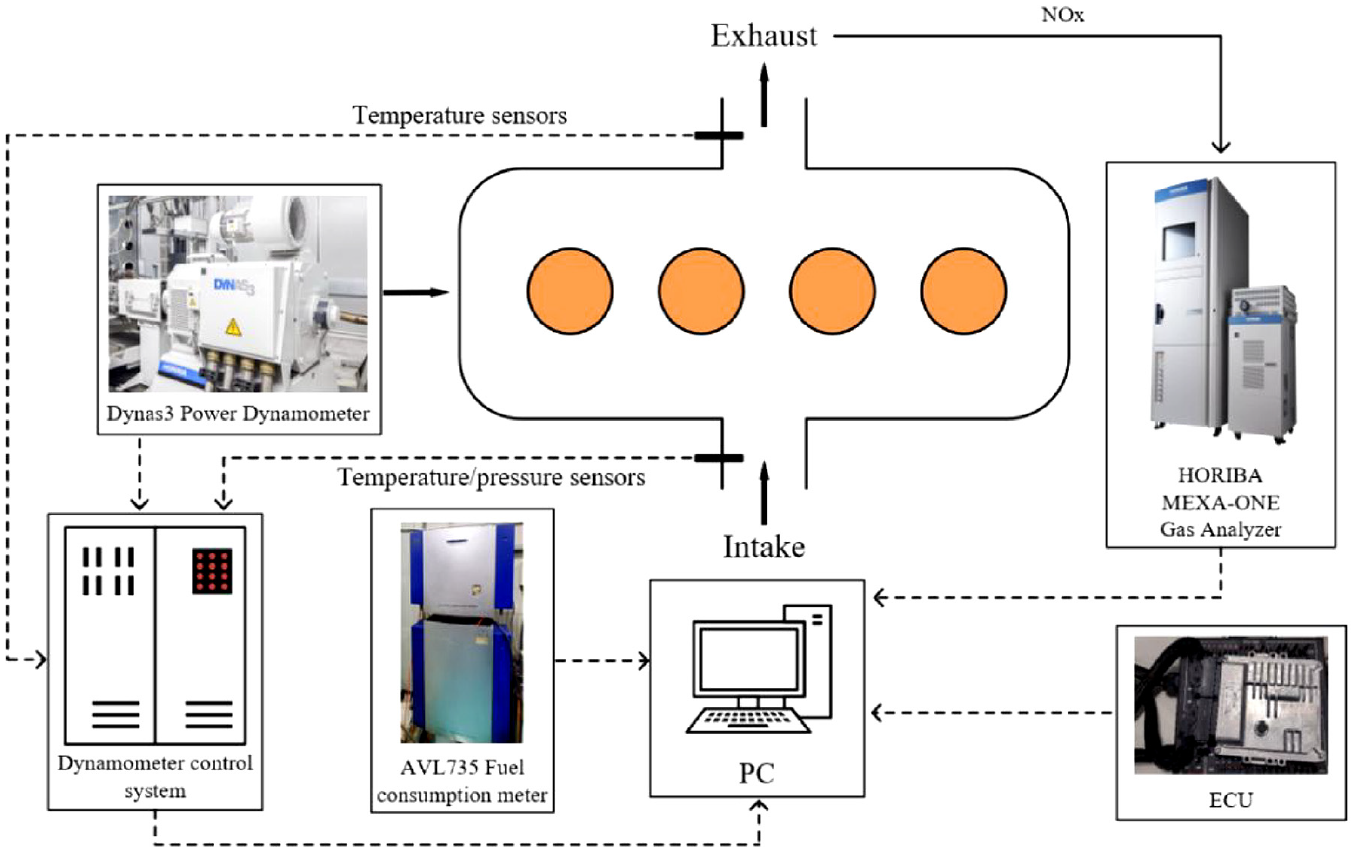
Diagram of experimental setup.
In this study, the cold start WHTC cycle data was used to build a BPNN model. Figure 3 shows the vehicle speed profile of the WHTC cycle. The total time of this transient cycle was 1800 s, and the test data were recorded every 1 s. Including the starting step, each transient cycle contains 1801 points. To ensure sufficient data volume for training the BP neural network model and to prevent overfitting of the model, the data from three cold-start WHTC cycles were tested and recorded in three different periods, called “Cycle 1,”“Cycle 2,” and “Cycle 3.”Figure 4 shows the NOx measurements in each WHTC cycle.
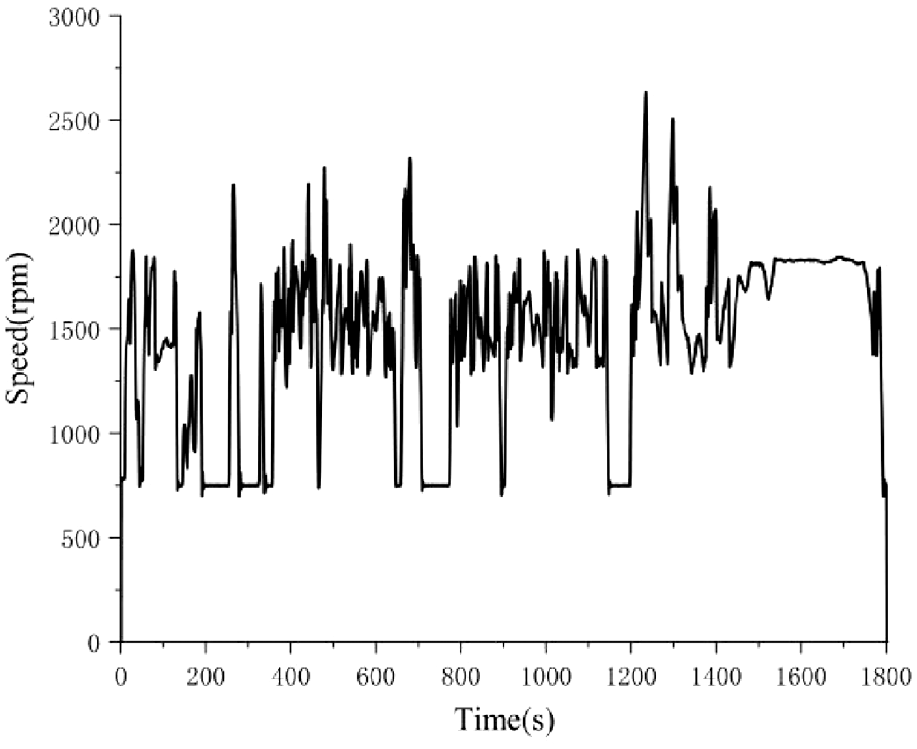
Engine speed curve of WHTC cycle.
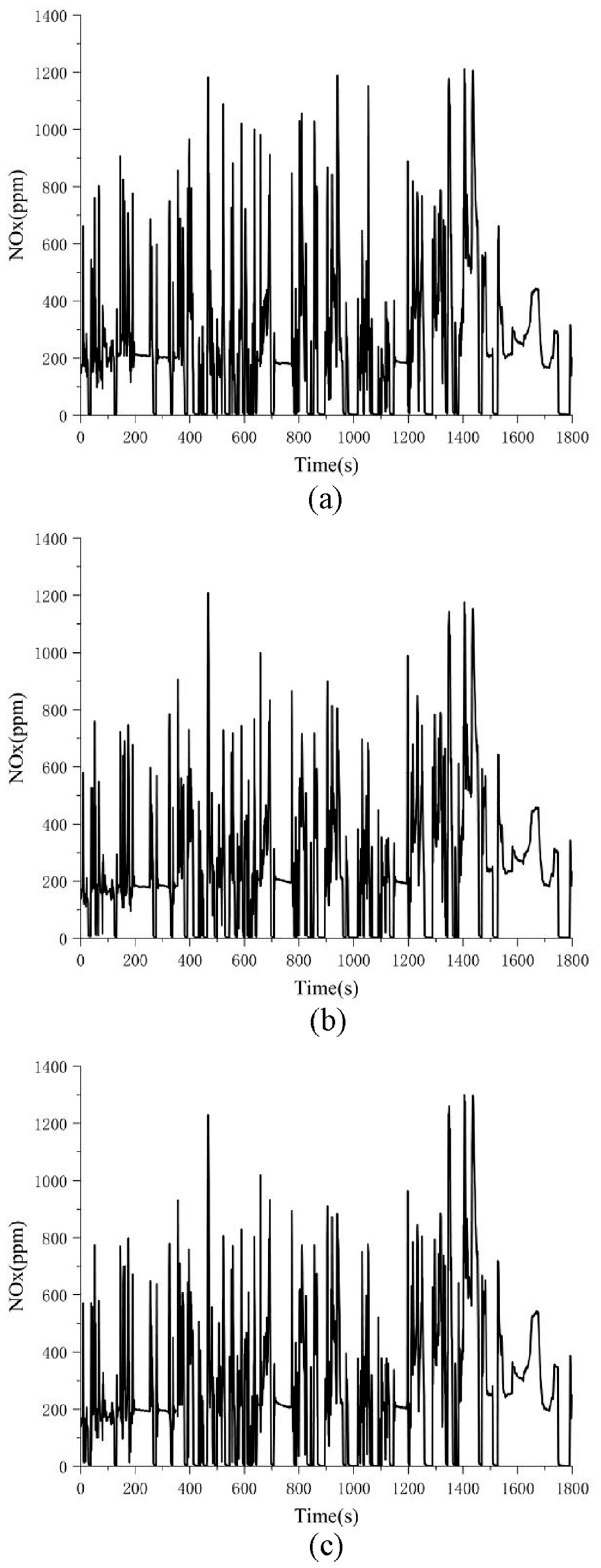
NOx measurement results for: (a) cycle 1, (b) cycle 2, and (c) cycle 3.
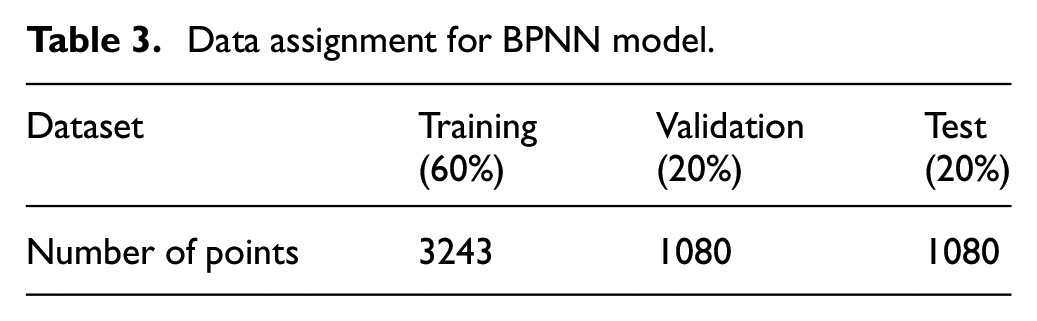
When dividing the dataset, manual and randomized division methods are usually used. However, in order to avoid the subjectivity of manual division, randomized division is usually used to reduce the bias. The total amount of data for the three WHTC cycles is 5403, which is randomly divided into three categories: training set, validation set, and test set. About 60% of the data was assigned to the training set and 20% of the data was assigned to the validation set and the test set, respectively. The training set is used in the model training and the validation set is used in the optimization process. Table 3 shows the data allocation for the BPNN model. Before optimization, the measured data had different dimensions, and the data were normalized using equation (7) in order not to affect the results of data analysis and to eliminate the effect of dimensions.

where
Data assignment for BPNN model.
As mentioned before, the target parameters of the optimization are the number of nodes in the hidden layer, all weights and thresholds. The upper bound of the weights and thresholds is 10 and the lower term is −10, and their values are real numbers. The lower bound on the number of nodes in the hidden layer is 10 and the upper bound is 30, and their values are integers. For each number of nodes in the hidden layer, one model optimization is performed to find the model with the highest accuracy. The population size for the pelican optimization is 100 and the number of iterations is 600. Finally, the model was evaluated using the R coefficient and the mean absolute error (MAE).
Results and discussion
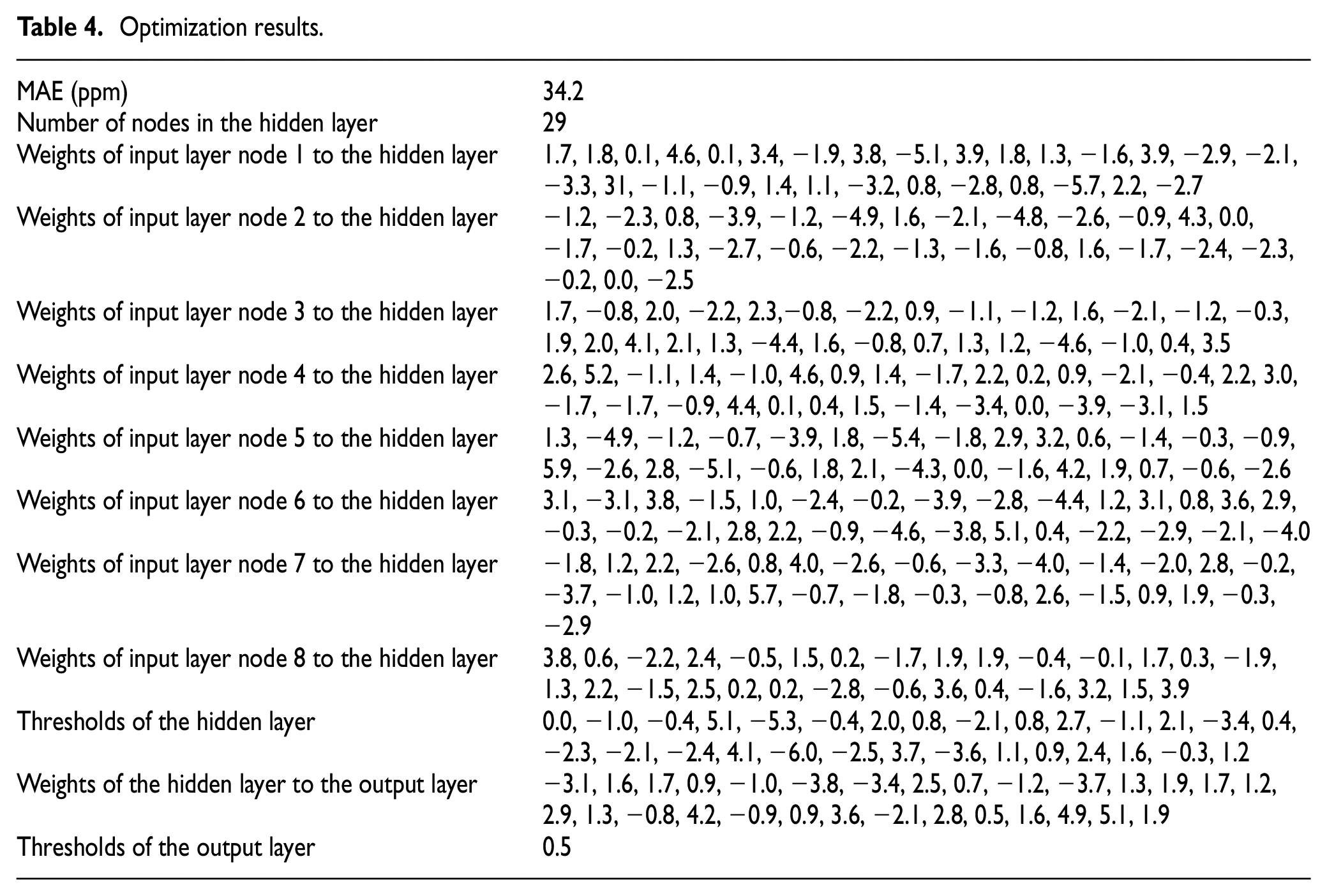
In this study, the BPNN parameters were optimized using the Pelican Optimization Algorithm. As shown in Figure 5, the optimized model has the lowest MAE value when the number of nodes in the hidden layer is 29. When the number of hidden layer nodes is 29, each input layer node to the hidden layer has 29 weights. The input layer of the established neural network has eight input parameters with a total of 232 weights. The number of nodes in the hidden layer is 29, with a total of 29 thresholds. There is only one output parameter, so the hidden layer to the output layer has a total of 29 weights and finally the implied layer has a total of one threshold. Total 291 optimization parameters. Table 4 lists the optimal fitness values and model parameters.
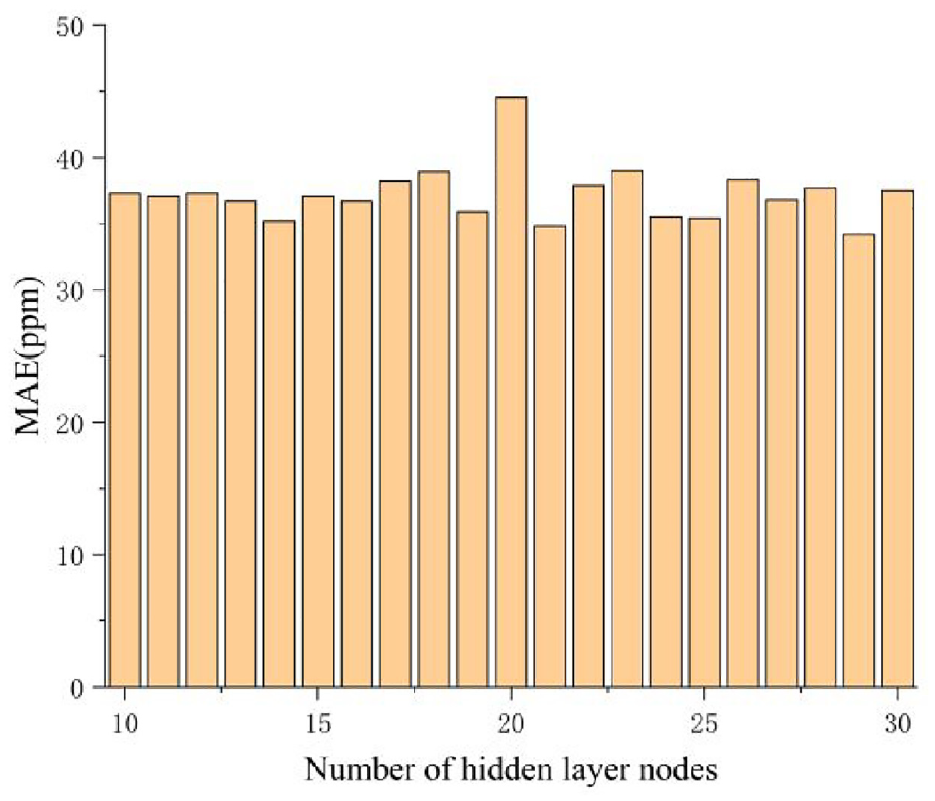
Optimal number of nodes in the hidden layer.
Optimization results.
The NOx prediction results of the test set are shown in Figure 6. For the model accuracy, the R coefficient and the MAE were used to evaluate the model. As shown in Table 5, the R coefficient value of the BPNN model based on Pelican optimization is 0.9641 and the MAE is 34.2 ppm. The largest forecast error occurs at the 700th forecast point at 20.4%. Previously, the data required for the NOx prediction models relied on some additional measurement equipment to obtain, and the resulting models only predicted NOx emissions at some steady-state operating points or under simple transient conditions, and the model prediction accuracy was not high. In contrast, the model in this study only uses conventional measurement equipment to obtain data without additional equipment and has high NOx prediction accuracy. Therefore, it has some advantages in the application of NOx emission prediction for cold WHTC cycle.
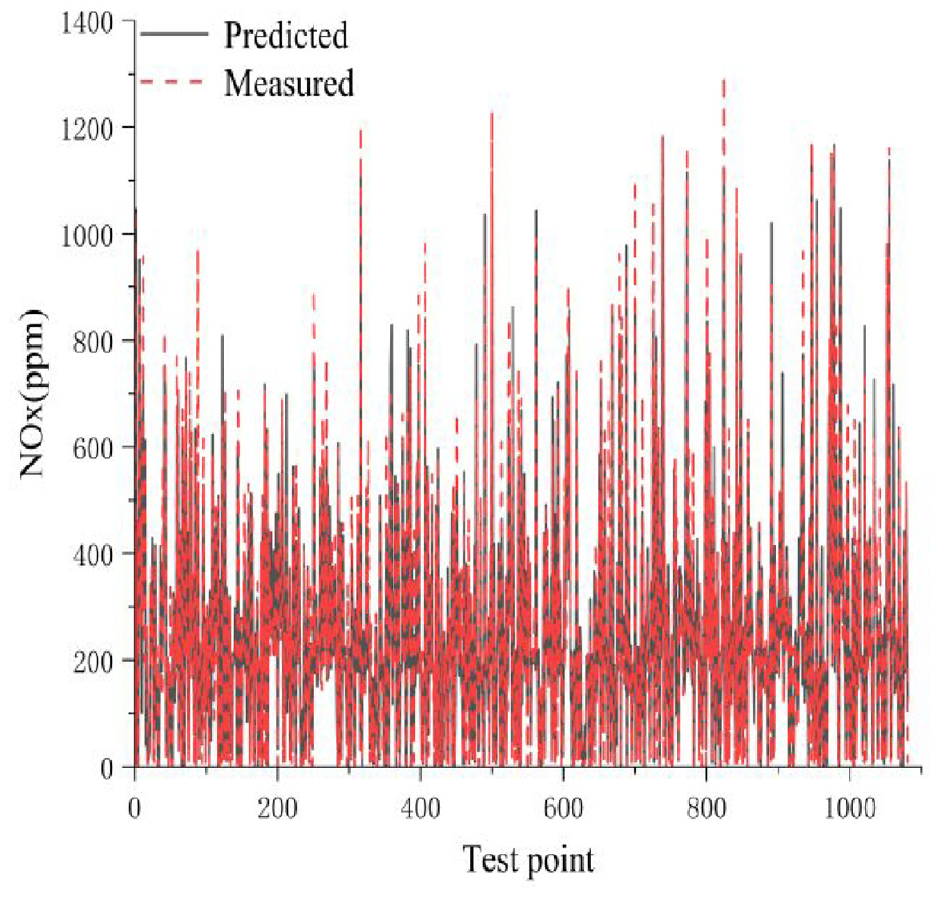
NOx prediction results for the test set.
Model accuracy evaluation.
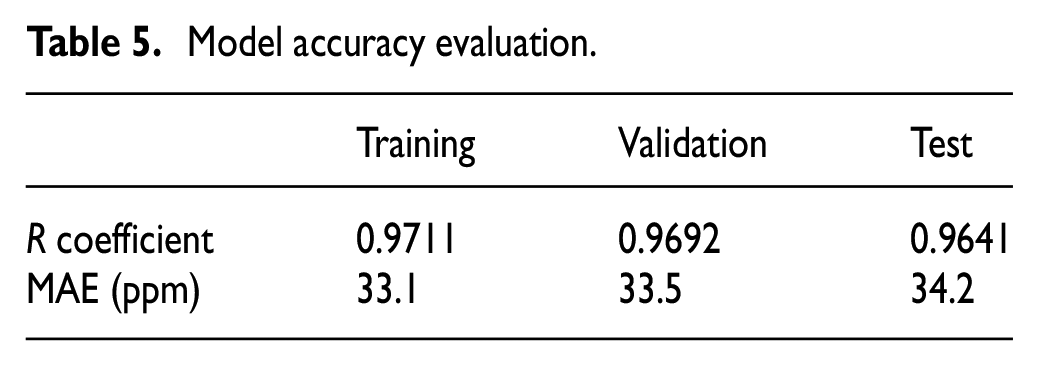
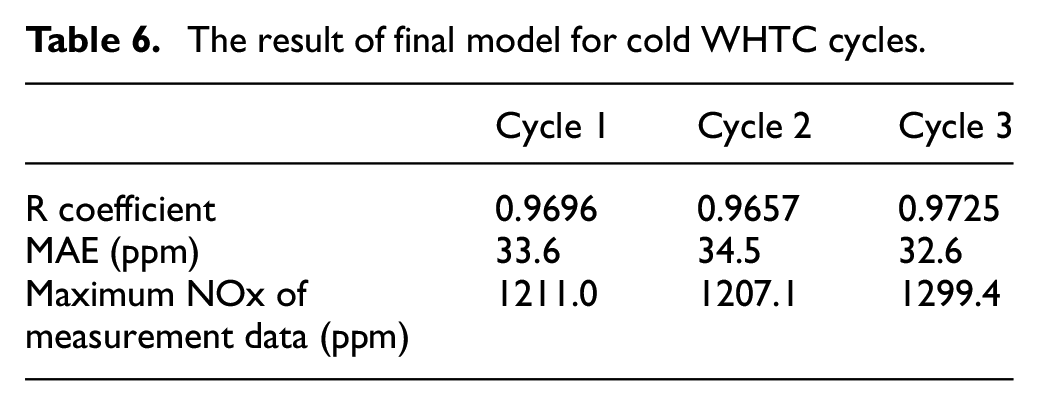
Figure 7 and Table 6 show the results of NOx prediction using the optimized model for each complete cold WHTC cycle data. The overall characteristics of the NOx results are similar for the measured and predicted NOx compared. In the prediction results of cycle 1, the prediction error at the peak is 9.1% and the maximum error is 24.5%, which occurs at 942 s. The maximum prediction error for cycle 2 occurs at the peak at 660 s, with an 18.1% error. The prediction error at the peak of cycle 3 is 3.5% and the maximum prediction error occurs at 664 s with an error of 13.7%. The main reason for this problem is that the data sampling frequency of the transient cycle is 1 s, which may cause some transient characteristics to be lost. This leads to excessive prediction error at some working condition points. However, for the entire cold WHTC cycle, the model was able to achieve more accurate predictions. The MAE of the developed model for three cycles of NOx prediction is about 32–35 ppm, which shows the high accuracy of the developed model for NOx prediction. The table lists the maximum NOx of the reference data to compare the level of MAE, and the average MAE is 2.8% of the cyclic maximum NOx. HORIBA MEXA-ONE gas analyzer has high speed response and high accuracy, and its measurement accuracy is about 2% of the full scale. Therefore, the prediction accuracy of the optimized resulting model is similar to the measurement accuracy of the test equipment.
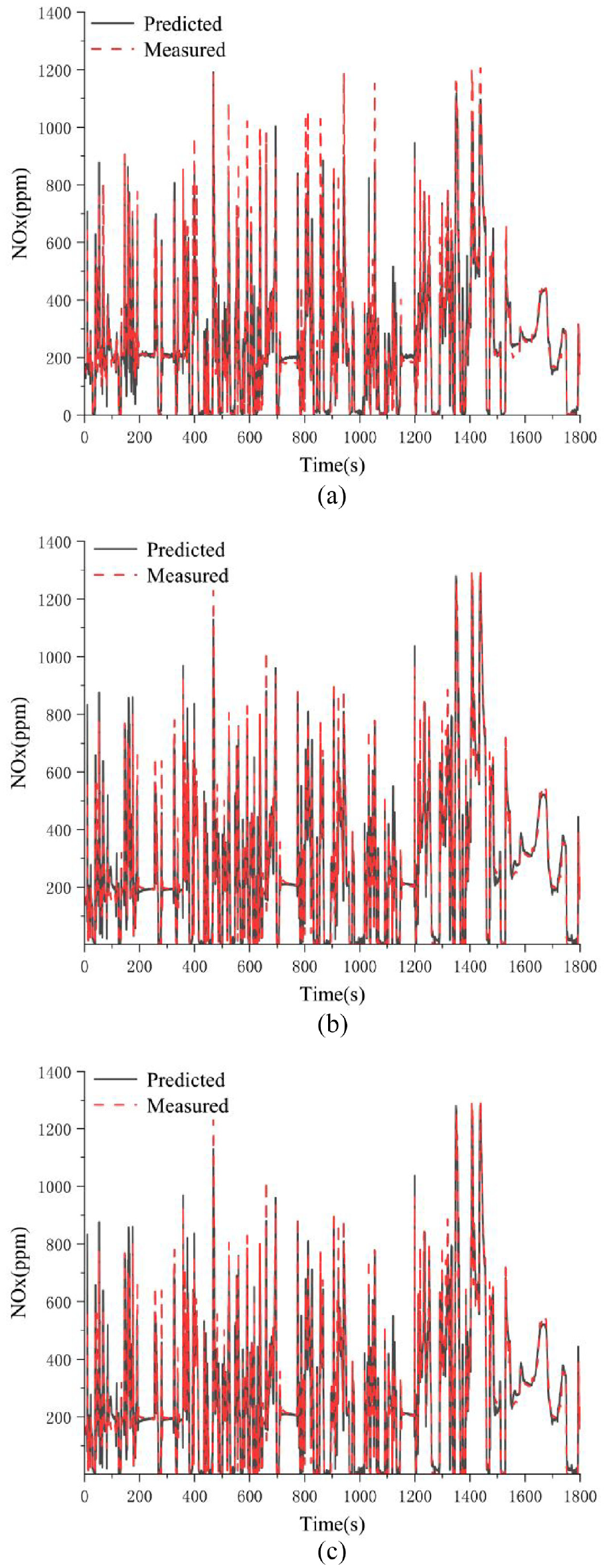
NOx prediction results of the final model for the cold WHTC cycles for: (a) cycle 1, (b) cycle 2, and (c) cycle 3.
The result of final model for cold WHTC cycles.
Conclusion
In this study, a BPNN model based on Pelican Optimization Algorithm was developed to optimize the weights and thresholds of the neural network model to predict NOx emissions from cold WHTC cycles of diesel engines. The main contributions of this study are as follows:
(1) The BPNN model based on Pelican Optimization Algorithm in this study can effectively obtain the best parameters and improve the model prediction accuracy with an R-value of 0.9641. Moreover, the NOx prediction model built using BPNN has a simpler structure and faster modeling and optimization than other NOx prediction models built based on equations. However, some transient characteristics are lost due to the sampling frequency, and the prediction errors for some operating conditions are too large. The maximum prediction error of the operating point occurs in cycle 1, and its value is 24.5%.
(2) For the prediction accuracy of the transient cycle, the MAE for the cold WHTC cycle is about 32–35 ppm. For all cycles, the MAE is about 2.8% of the maximum NOx emissions. The accuracy of the HORIBA MEXA-ONE gas analyzer measurement is about 2% of the full scale. Thus, the prediction accuracy of the model is comparable to the accuracy of NOx measurements using the measurement equipment.
(3) Because the NOx prediction model is built in MATLAB, it can be coupled with the intake and exhaust models built in other models (e.g. GT-Suite model) to build a complete engine model and promote the expected control of engine emission NOx. In addition, the predicted NOx can also be used as input data for the after-treatment model for the research and optimization of key technologies such as SCR urea injection, realizing the true meaning of off-line simulation platform building.
Footnotes
Acknowledgements
The authors would like to thank the reviews whose constructive and detailed critique contributed to the quality of this paper.
Author contributions
Xu Chen: Investigation, experiment, Data curation, Writing – original draft. Guoxiang Li: Formal analysis. Guihua Wang: Conceptualization, Methodology. Shuzhan Bai: Project administration, Writing – review & editing, Funding acquisition. Zhenguo Li: Visualization, Supervision.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Shandong Province Key R&D Program, China (2021CXGC010207), and the open funds of the National Engineering Laboratory of Mobile Source Pollution Control Technology of China (Grant No. NELMS2019A01).