
Abstract
With the responsibilities of delivering customer service and creating moments of truth, hotel employees’ working lives are always difficult and now possibly have become more challenging because of the arrival of a service robot. To obtain an in-depth understanding of hotel employees’ perspectives on human-robot collaboration, this study applied a multi-theoretical lens and scrutinized how the robot product levels would influence employees’ perceived job duality and workplace well-being. By employing a scenario-based experimental design method and using a sample of 384 hotel receptionists, the results of this research disclose the significant roles of the three different robot product levels in influencing employees’ perceptions on social presence and job insecurity. Specifically, both core and tangible product levels offered by robots could significantly influence employees’ perceived social presence. While only the core product influenced employees’ perceived job insecurity, the tangible and extended products surprisingly manifested an interaction effect. Apart from these, this study also discloses the significant role of cognitive crafting in terms of mediating the relationship between perceived social presence/perceived job insecurity and cognitive well-being. In practice, what is found in this study provides research-based suggestions for the different stakeholders involved in human-robot collaboration and they are namely policymakers, hotel managers, frontline employees and robot designers & manufacturers.
Keywords
Introduction
The hospitality industry has entered a new era characterized by humans and machines working together since the landing of Industry 5.0 (Pillai et al., 2021). Thanks to the rapid development of artificial intelligence (AI), service robots can be reactive and adaptable to surrounding environments nowadays (Ivanov and Webster, 2019), while defined by Wirtz et al. as “system-based autonomous and adaptable interfaces that interact, communicate and deliver service to an organization’s customers” Wirtz et al. (2018, p. 909). Today’s business world has witnessed the realization of robots initiating social interactions (Belanche et al., 2020) and making autonomous decisions (Lu et al., 2019). Robotic applications can be easily found in current hospitality sectors, such as the Henn na Hotel in Japan. This hotel opened in 2015 and holds the Guinness World Record for being the first robot-staffed hotel (Osawa et al., 2017). The global market of hospitality robots is projected to reach a value of $2.3 billion by 2031, with an annual growth rate of 25.5% (SkyQuest, 2024). It is also estimated that service robots are replacing human employees by performing a wide range of tasks, including not only basic and routine work, but also complicated responsibilities like interacting with customers (Hofmann et al., 2020; Huang and Rust, 2018).
The hospitality industry is known as customer-oriented (Memon et al., 2025), being human-dependent and labor-intensive (Delfgaauw, 2007). Its employees are prone to physical and emotional exhaustion, especially during labor shortages or difficult customer encounters (Bowie et al., 2017). To perform well and keep customers satisfied, employees are often forced to suppress their own feelings and identities (Choi et al., 2019), and this is a phenomenon known as “emotional labor” (Hochschild, 1983: p. 7). Service robots were initially introduced to help employees by providing either/both physical (e.g., delivering luggage) or/and emotional support (e.g., being entertaining). However, as scholars such as Hertzfeld (2019) highlighted, in the case of robot glitch or malfunction, the resultant service failure would probably trigger more emotional labor among employees. Additionally, individuals’ technology readiness and acceptance vary (Walczuch et al., 2007), some employees might resist working with robots because of personal circumstances, while robot counterparts are very welcome by their colleagues. Based on these, working with robots involves a duality, it might contribute to both job resources and job demands by alleviating work pressure and creating troubles simultaneously. This is consistent with the job demands-resources (JD-R) model (Bakker and Demerouti, 2007). Although some researchers have applied the JD-R model to capture the duality of human-robot collaboration (e.g., Christ-Brendemühl, 2022), studies on how job demands and job resources could be created from a product design perspective are still scant (Ma et al., 2021).
In the past few years, the quantity of publications on hospitality service robots has been showing an upward trend. Compared to the existing robot research from customers’ standpoints (e.g., Lu et al., 2021; Marghany et al., 2025), the number of robot literature focusing on employees’ perspectives was found to be relatively small (Paluch et al., 2022). Among these studies, service robots were normally observed as generic products without distinct product levels (e.g., Abdelhakim et al., 2023; Parvez et al., 2022; Pizam et al., 2022), although in some cases, part of the robot product levels such as appearance or function was investigated (Lan et al., 2022; Leung et al., 2023). As newly introduced products, service robots differ in function, appearance and many other aspects, but still can be observed as a hospitality product including three different levels, as postulated in Kotler and Armstrong’s product level theory (2010). Nevertheless, which and how robot product levels would influence hotel employees’ perspectives and work outcomes (e.g., workplace well-being) remain underexplored. Although many hotels are introducing service robots to improve productivity and efficiency, it is still unclear whether robots would be perceived more as a resource or demand by employees, as suggested by the JD-R model (Bakker and Demerouti, 2007). All of these are important gaps calling for urgent research attention. Yet, limited efforts were found regarding the investigation of how the three different robot product levels influence hospitality employees’ working life, especially by applying a multi-theoretical lens (Xu et al., 2023).
Additionally, the product level theory has been highly recognized in product design and marketing activities because of its alignment with customers’ needs, and it has been applied in tourism and hospitality studies (e.g., Duan et al., 2018). With the product level model, business operators can identify whether the product at a certain level is profitable or promising, so evidence-based investment decisions can be made and resources can be allocated with confidence (Hannila et al., 2020). Whether to use robot applications is a big decision involving a significant amount of investment. Unfortunately, given the customer-oriented nature of the hospitality industry, existing research has extensively focused on the robot experience of external rather than “internal” customers, that is, employees. Whether service robots are suitable for hospitality sectors and which robot product levels are of great significance for robot adopters remain under-researched (Song et al., 2022a). Such concerns are reflected not only in research but also in practice. Although fully automated hotels (e.g., FlyZoo Hotel in China, CNBC International, 2019) or restaurants (e.g., CaliExpress by Flippy in the USA, Global Update, 2023) already exist, most hospitality sectors still rely upon a combination of human staff and robotic applications to deliver service (Ma et al., 2022).
In light of the above, this study sheds light on the context of hotel frontline and answers the research question of how robot product levels influence front desk employees’ perspectives and affect work outcomes. By applying a multi-theoretical lens and employing scenario-based experimental design, how the three different robot product levels influence employees’ perceived social presence and job insecurity are scrutinized and uncovered. Although the relationship between job demands-resources and workplace well-being is surprisingly found to be insignificant in this research, the significant role of cognitive crafting in mediating the relationship between employees’ cognitions and cognitive well-being is disclosed. When it comes to practical implications, research-based suggestions are provided to the different stakeholders involved in human-robot collaboration, covering aspects of policymaking, hotel management, requirements for employees and robot design & manufacturing.
Literature review
Human-robot collaboration at hotel frontline
In the past couple of years, human-robot collaboration (HRC) at hotel frontline has been increasingly attracting the attention of researchers, especially those from countries where service robots have been widely recognized and adopted, such as China. For instance, through a double theoretical lens (i.e., the theory of planned behavior and job demands-resources model), Wu and Zhang (2024) explained and predicted employees’ intention towards HRC and their positive behavior. By employing both interviews and questionnaire survey, this research discloses the significant roles of attitude & subjective norm towards HRC and job autonomy of HRC in indirectly influencing employees’ proficient and adaptive behavior through intention towards HRC. Besides this, the moderating role of perceived behavioral control towards HRC in the relationship between subjective norm and intention towards HRC is also identified.
In the following year, Wu et al. (2025) published another interesting research on HRC which involves multiple studies. By applying the event system theory (EST), this research found a positive relationship between the three dimensions of event system (i.e., novelty, disruption, and criticality) and employees’ job insecurity, which further predicts employees’ learning behavior. Likewise, workload predicts hotel employees’ work performance. Furthermore, duration and departmental dispersion have a moderating effect on the relationship between HRC event strength and employees’ job insecurity and workload.
Similarly, Li et al. (2024) published their research involving a two-stage, multisource questionnaire survey among hotel industry employees and managers, and this is one of the first studies investigating the impact of work autonomy in collaborating with robots on employees’ work and health outcomes. Their study reveals the significant role of job insecurity in mediating the relationship between work autonomy and service innovation behaviour/insomnia, as well as shows that person-job fit not only moderates the relationship between work autonomy and job insecurity but also moderates the mediating role of job insecurity.
In the year of 2025, Li et al. (2025) shared their research output in the area of HRC again. This time, through the lens of Conservation of Resources (COR) theory, the associations between HRC and proactive behavior respectively through workload and harmonious passion are uncovered. It is also found that robot trust not only moderates the relationship between HRC on workload/harmonious passion but also plays a moderating role on the mediating effect of workload/harmonious passion.
Apart from the above research team, many other scholars also involved hotel frontline employees as part of the samples in their studies and examined the impact of HRC on different work outcomes such as work well-being (Yang et al., 2025) and financial & environmental performances towards sustainability (Irani, 2025). Interestingly, most existing studies paid attention to HRC but few had particularly shed light on one of main characters in HRC which is robot and inspected how its three different product levels influence employees’ perspectives and affect work outcomes. A quick review of robot studies published over the recent years seems has emphasized the urgency of conducting this research.
Theoretical foundations
Despite their unique features, hospitality products can be conceptualized as a combination of core, tangible, and extended products, according to the product level theory developed by Kotler and Armstrong (2010). The core product, as the first level, refers to the main benefit of the product, while the tangible product, sitting at the second level, means the physical elements that allow the delivery of the core product (Kotler and Keller, 2011). For example, if someone books a hotel room without any other expectations, “a room for the night” would be the core product, while the related room features such as a king bed, luxurious bedding, a range of toiletries and a kitchenette would be the tangible product. The extended product includes any intangible elements that deliver extra value to customers, enabling a hotel to stand out from the competitors. In the above example, the relevant extended product could be a welcoming atmosphere, responsive employees, or prompt complaint handling.
Similarly, what a service robot offers to hospitality employees also can be observed as a combination of three product levels which include robot function, robot appearance, and extra value of the robot, as illustrated in Figure 1. In line with the Kotler and Armstrong’s product level theory (2010) and to fulfill the scope of current particular research, it should be noted that in this study, robot function refers to the main task that the robot can complete, such as checking in/out guests, so front desk employees’ responsibilities are shared. Regarding robot appearance, it means the robot image that can be identified by the employees at first sight, for instance, appears to be a machine, or looks like a human. Lastly, extra value of the robot relates to the additional benefits that the robot can provide, for example, telling a joke or performing a dance, so employees’ working life can be better supported. A service robot’s core, tangible and extended product offer.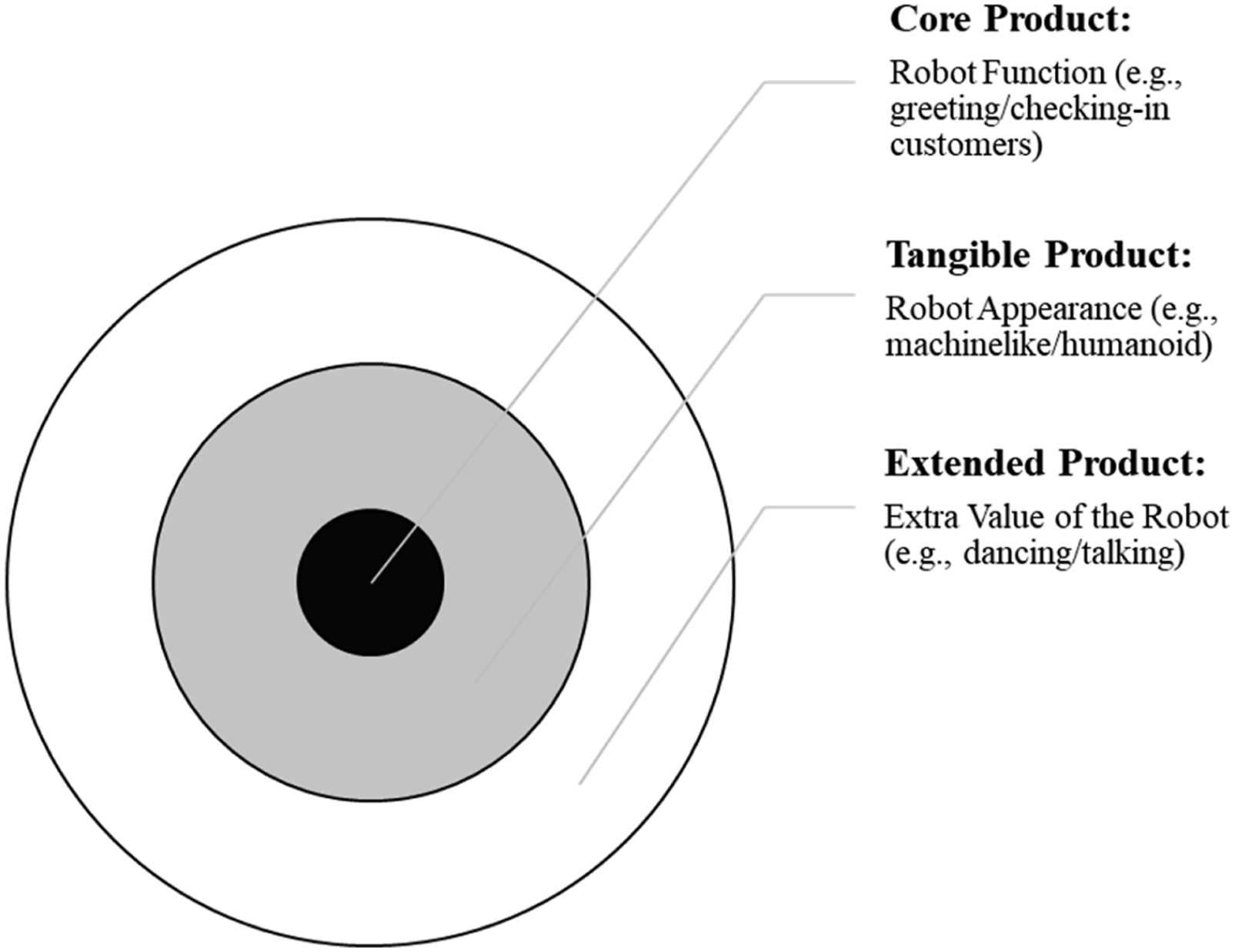
Although the initial intention of adopting service robots is to provide resources for employees, the service failures created by glitches or malfunctions might lead to heavier workloads (Price, 2016), in which case employees would feel physically tired and mentally exhausted in turn (Liu et al., 2025). The duality of human-robot collaboration, or coexistence of job resources and job demands is consistent with the job demands-resources (JD-R) model (Bakker and Demerouti, 2007). As conceptualized above, service robots encompass three different product levels. Now, because of the co-existence of job demands and job resources in human-robot collaboration, the “whole-product concept” (Schmidt, 2010) embedded in the product level theory might be questioned. According to the “whole-product concept”, all products include attributes and benefits to fulfill customer value proposition. That is, the three product levels are supposed to be useful and helpful for customers. However, the reality would be different from this postulation if robot product levels contribute to job demands instead of job resources among hospitality employees. In this research, the connections between robot product levels and job demands/resources are inspected, thus both the product level theory and the JD-R model are part of the theoretical foundations.
Moving forward, as self-determination theory (SDT; Ryan and Deci, 2000) postulates, individuals would thrive to fulfill three intrinsic psychological needs (i.e., autonomy, relatedness, and competence) to pursue workplace well-being. In a work context, autonomy stands for having control, relatedness means feeling connected and supported, and competence indicates experiencing a sense of mastery or efficacy (Slemp et al., 2015). To satisfy these three fundamental needs, it has been found that a strategy called “person-job fit” (Kristof-Brown et al., 2005), which represents finding an alignment between personal resources and job requirements, has been widely adopted. Job crafting is derived from this background, and a discussion of how employees conduct job crafting and apply the strategy of person-job fit in human-robot collaboration is included in the following hypothesis development.
In light of the above theoretical foundations, the research framework for this study is developed as below in Figure 2, followed by the hypotheses development. To summarize, service robots at the hotel frontline are observed as a combination of core, tangible, and extended products, as suggested by the product level theory (Kotler and Armstrong, 2010). Meanwhile, job demands-resources model (Bakker and Demerouti, 2007) is used to capture the duality of human-robot collaboration and it is proposed that different robot product levels would influence employees’ perceptions on social presence and job insecurity in different ways. Moreover, as the self-determination theory (Ryan and Deci, 2000) proposes, employees’ cognitions toward human-robot collaboration would directly affect their cognitive well-being. In addition to these direct relationships, it is predicted that the effects of employees’ cognitions on cognitive well-being would be mediated by cognitive crafting. Research framework.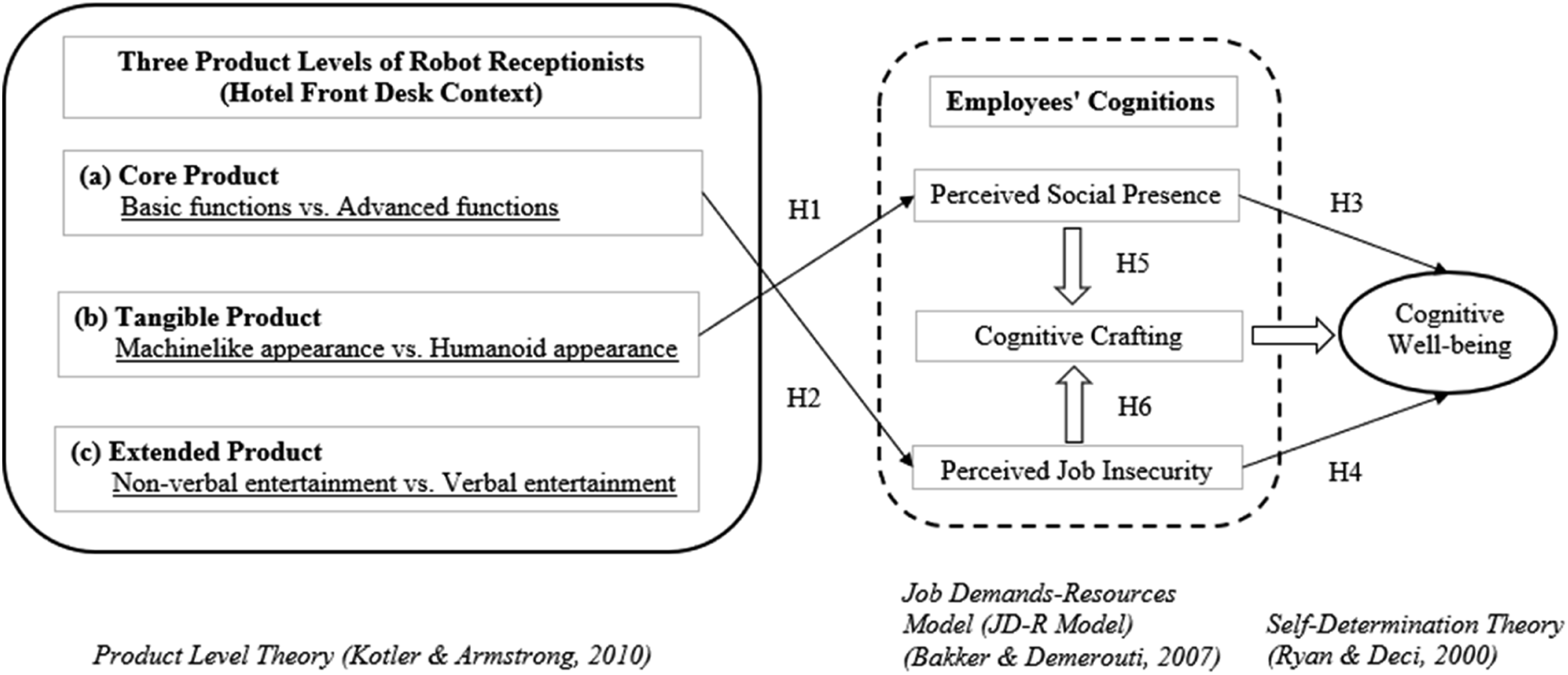
Product levels and social presence
Social presence, introduced by Short et al. (1976), refers to the status of a real person involved, leading to the establishment of interpersonal relationships. In service research, Van Doorn et al. (2017) explain automated social presence as the degree to which technology can make people feel that another social entity is present. The initiator of social presence could be either human or artificial intelligence that stimulate reactions to social cues (Biocca et al., 2003). It should be noted that low social presence has been identified as a critical factor hindering employees’ ongoing adoption of service robots (Fu et al., 2022). That is, high social presence perceived by employees which enhances the sense of connectedness is likely to perform as a job resource and can facilitate human-robot collaboration (Hakanen and Roodt, 2010). Moreover, consistent with the media equation theory (Reeves and Nass, 1996), hospitality employees are likely to equate humanoid service robots with their human colleagues as people have a natural tendency to accept things at face value (Lee et al., 2006).
Undeniably, the three product levels of service robots would influence employees’ perceived social presence jointly since they are inseparable as part of a complete product. Nevertheless, according to the above discussions, it seems that the tangible product, or robot appearance would be most likely to significantly influence perceived social presence, and compared to a machinelike robot, a humanoid robot should be able to create a stronger feeling of being accompanied and supported by a real colleague among employees (Lu et al., 2021; Mende et al., 2019). Interestingly, the uncanny valley theory suggests that a service robot’s appearance that is too close to humans but not perfect might create psychological discomfort among people (De Keyser et al., 2019; Mori et al., 2012). In other words, there is still a distance between “being close” and “being identical”.
To verify the uncanny valley theory in this research, robot appearances that are similar to human face and close to human face are selected for the purpose of experimental design. To distinguish these two different appearances, “similar to human face” is called machinelike appearance, means still can be identified as a machine at first sight, and “close to human face” is called humanoid appearance. While the former represents robot appearance which is just “similar” to that of human beings, the latter is used to inspect whether the boundary between “being close” and “being identical” can be found in this research as the theory postulates. Taking these together, the first hypothesis is proposed as:
While the three robot product levels working jointly, the tangible product has a significant influence on employees’ perceived social presence. The more humanoid the robot appearance is, the higher level of social presence will be perceived by employees.
Product levels and job insecurity
Job insecurity (JI), according to Witte (1999), refers to individuals’ overall concern regarding their jobs and suspicion regarding whether their jobs will exist in the future. As Darvishmotevali et al. (2017) and Lee et al. (2018) discovered, JI may significantly influence employees’ attitudes and performance. According to Bakker (2015), job demands encompass all energy-consuming aspects of work context, and JI is one of them that cannot be neglected. The three kinds of service robots that have been widely used in current hospitality sectors are food delivery robots, cleaning robots, and robot receptionists (Tuomi et al., 2021). Unlike tablet service kiosks, service robots perform similarly to human employees and are able to stimulate high-quality customer interactions (Brengman et al., 2021). Bowen and Morosan (2018) have predicted that 25% of the hospitality industry workforce will be automated by 2030. Consequently, hospitality employees responsible for frontline tasks may experience high levels of JI in the form of service robot risk awareness (SRRA) (Li et al., 2019).
Accordingly, the more competent the robot is, the stronger sense of job insecurity the employees would have. As discussed in the last section, although the three inseparable product levels of service robots would all influence employees’ perceived job insecurity, it seems that compared to the tangible product (i.e., what the robot looks like) and the extended product (i.e., extra support the robot provides), the core product (i.e., what the robot can do) is the product level that most likely to significantly influence employees’ perceived job insecurity (Dengler and Gundert, 2021; Malik et al., 2022). When conducting the experimental design for this study, the core product contains two types of robot functions, one is basic functions, referring to the robot can only greet customers at the front desk, while the other is advanced functions, indicating the robot receptionist can check-in/out customers. Compared to the basic functions, the advanced functions involve tasks that only human employees could do previously, and if these tasks are done by robots instead, employees probably would feel threatened and replaced. Based on these, we propose:
While the three robot product levels working jointly, the core product has a significant influence on employees’ perceived job insecurity. The more advanced the robot function is, the higher level of job insecurity will be perceived by employees.
Employees’ cognitions and cognitive well-being
According to Pediaa (2020), cognition is a relatively broader concept compared to perception. People tend to experience perceptions first in the interest of acquiring new knowledge, followed by cognitions, which require the incorporation of existing information. Workplace well-being (WWB), it relates to nearly all aspects of working life, has been recognized as an extremely important contributor to organizational success (Harter et al., 2003) and covers the quality and safety of the physical working environment and how employees perceive their jobs, working environments, and organizational climates (International Labor Organization, 2022).
There are two complementary components in WWB: hedonic and eudaemonic (Culbertson et al., 2010; Ryan and Deci, 2001). While the hedonic dimension is about happiness and individuals’ affective and cognitive evaluations of working life (Diener, 2000), the eudaemonic dimension emphasizes optimal functioning and human growth, which are normally related to psychological well-being (Ryff and Keyes, 1995). This study focuses on the cognitive aspect of workplace well-being because employees’ cognitions are investigated. As some researchers suggest, cognitive well-being refers to people’s global evaluation of their jobs, indicating the achievement of job satisfaction (Slemp et al., 2015).
Linking back to the discussions on social presence and job insecurity, feeling connected with and supported by a “real” colleague would probably enhance employees’ well-being and make employees satisfied with their job, while the feeling of being threatened and replaced is likely to be counterproductive. Based on the study conducted with cruise ship employees, the negative relationship between job demands and well-being and the positive relationship between job resources and well-being were confirmed (Radic et al., 2020). Agreeing with this finding, Ndengu and Leka (2022) uncovered the contrary impact of job demands and job resource on employee well-being by surveying workers from five banks in Zimbabwe. Likewise, through a research conducted with employees from various occupational status (e.g., white collar, public functionary), Claes et al. (2023) found both job demands and job resources are directly related to general well-being. Specifically, job resources are positively related to well-being, while job demands worked oppositely, negatively affecting well-being. In line with previous studies and performing as job resource and job demand respectively, it is proposed that “perceived social presence” would contribute to employees’ cognitive well-being, while “perceived job insecurity” would work in an opposite way, jeopardizing cognitive well-being.
There is a positive relationship between employees’ perceived social presence and cognitive well-being.
There is a negative relationship between employees’ perceived job insecurity and cognitive well-being.
Mediating role of cognitive crafting
Job crafting, including three subdimensions (cognitive crafting, task crafting, and relational crafting), refers to the cognitive and physical efforts individuals apply to tasks or the relational boundaries of their work so that a balance between job demands and personal resources can be achieved (Wrzesniewski and Dutton, 2001). In line with the concept of person-job fit (Kristof-Brown et al., 2005), engaging in job crafting would enable employees to reshape their jobs to be more aligned with their circumstances (Slemp et al., 2015). Regarding the three subdimensions, cognitive crafting means employees change the way of viewing their jobs, task crafting involves employees’ efforts to actively alter the approach to completing their jobs, and relational crafting happens when employees proactively modify the interpersonal relationships at work (Wrzesniewski and Dutton, 2001). Cognitive crafting is likely to occur before task and relational crafting since it involves changes in cognitions that normally guide individuals’ behaviors (Mäkikangas and Schaufeli, 2021). Importantly, it has been found that job crafting predicts employees’ workplace well-being because it contributes to job satisfaction (Berg et al., 2010; Slemp and Vella-Brodrick, 2014).
Moreover, Tims et al. (2013) framed the conceptualization of job crafting within the job demands-resources (JD-R) model (Bakker and Demerouti, 2007), and this is consistent with the proposition embedded in the model, referring to employees are motivated to activate job crafting when aiming to secure higher levels of job and personal resources (Bakker and Demerouti, 2017). Therefore, job crafting reflects the efforts that employees make to balance job demands and resources according to their resources and pursuits (Slemp and Vella-Brodrick, 2013). In other words, job crafting is a process by which employees thrive to maximize job resources and minimize job demands. Connecting with previously discussed, what hospitality employees pursue at work would be high social presence and low job insecurity so that their workplace well-being (WWB) can be maintained. In line with the above-mentioned, in human-robot collaboration, the high social presence of a robot colleague is a job resource for employees because it creates a sense of relatedness. Job insecurity, on the other hand, is a job demand that employees intend to minimize because it makes employees feel a loss of control and weakens their sense of mastery and efficacy.
While doing cognitive crafting, employees adjust the ways of viewing their work and this would directly affect how the work is done and the interpersonal relationships at work. The objective of this process is to fully utilize job resources and minimize job demands, which are likely to be contributory to workplace well-being, particularly on cognitive aspect. The association between job crafting and employee well-being has been revealed in previous research (e.g., Boehnlein and Baum, 2022; Dreer, 2022; Han, 2023; Signore et al., 2024), but their relationship particularly at the cognitive level has not been adequately explored so far. Sitting at the cognitive level, cognitive crafting would happen after the employees’ perceptions have developed, hence, employees’ perceived social presence/perceived job insecurity would have indirect impact on their cognitive well-being through cognitive crafting. Taking these together, we propose:
Employees’ perceived social presence indirectly affects their cognitive well-being through cognitive crafting.
Employees’ perceived job insecurity indirectly affects their cognitive well-being through cognitive crafting.
Method
Scenario-based experimental design
Experimental design has been widely recognized by tourism and hospitality researchers (e.g., Huang et al., 2021) as it allows the exploration of the causal relationships among variables (Leung and Law, 2007). This method was selected by the research team because it was challenging to find service robots equipped with three different product levels that particularly suit the purpose of this study in the real world (Ma et al., 2022; Wang et al., 2024). Featuring a context of human-robot collaboration at the hotel front desk, a between-subjects 2 (core product: basic functions - greeting customers vs advanced functions - checking in/out customers) × 2 (tangible product: machinelike appearance - similar to human face vs humanoid appearance - close to human face) × 2 (extended product: non-verbal entertainment - dancing with music vs verbal-entertainment - telling a joke) experimental design including a total of eight different scenarios (as shown in Appendix 1) was conducted.
As regards the specific hypothetical scenario, the key theories applied in current robot literature and the robot products existing in today’s business world decided which specific attributes should be included within each product level. Regarding the core product, the main function of a robot working at the hotel front desk can be either simply greeting customers or completing checking in/out tasks, such as robot Connie at Hilton McLean (BusinessWire, 2016) and robot receptionists at Henn na Hotel (The Japan Times, 2018) respectively. When it comes to the tangible product or robot appearance, as the discussions for Hypothesis 1 specified, two types of robot images were selected to verify the uncanny valley theory (Mori et al., 2012). Finally, the extended product (i.e., extra value) of service robots was determined based on what robots can do nowadays. With the advancement of technology, joke-telling robot (e.g., Good Morning Britain, 2017) and dancing robot (e.g., Boston Dynamics, 2020) have been developed and released. For hotel receptionists that always need to deal with emotionally demanding tasks, it is believed that either non-verbal or verbal entertainment provided by a robot colleague would support them emotionally (Parincu, 2023).
Measurement
All constructs were measured on a seven-point Likert scale (1 = strongly disagree to 7 = strongly agree), using previously validated scales that were adapted to the context of human-robot collaboration. Specifically, perceived social presence was measured using three items adapted from the Self-Reporting Social Presence Scale developed by Kreijns et al. (2011). As regards perceived job insecurity, four items derived from the work of Brougham and Haar (2018) were adopted.
Regarding cognitive crafting, five items from Slemp and Vella-Brodrick’s Job Crafting Questionnaire (2013) were used. Moreover, cognitive well-being was measured using 3 items derived from the Michigan Organizational Assessment Questionnaire (MOAQ, Cammann et al., 1979). A list of measurements, the factor loading for each item, and the Cronbach’s alpha for every construct are included in Appendix 2. All Cronbach’s alphas for constructs were greater than 0.70 (Hair et al., 2010), which represented satisfactory reliability.
Data collection
The experimental data were gathered through an online, open-source survey creation application. Prolific, an online platform known for its competitive data quality and flexibility (Prolific, 2023), was used for survey distribution. To ensure that all participants were current hotel receptionists and could comprehend the experimental scenario without any language barrier, the custom screening feature of Prolific was used, as suggested by Wang et al. (2024). Due to the availability of the participants pool on Prolific, the potential respondents for this study were predominately current hotel employees from UK and USA that speak English fluently. Therefore, convenience sampling was applied for this research. This sampling technique is widely used for quantitative research to quickly approach the desired participants (Simkus, 2023). Crowdsourced convenience sampling through online platforms such as Prolific or Amazon Mechanical Turk (MTurk) has been prevalent among scholars (e.g., Ma et al., 2022), mainly because these platforms normally include a relatively more diverse pool of respondents (Nikolopoulou, 2022).
According to Pechmann (2019), given the current “crowdsourcing” environment, the recommended cell size for the experiment is 50, meaning the ideal sample size for this study should be 50*8 (number of scenarios) for a total of 400. When using G*Power and setting the criteria as an effect size of f = 0.25, α err prob of 0.05, and a power of 0.95 (Ma et al., 2022), the minimum sample size was shown to be 357 (G*Power, 2022). Based on the suggested cell size and power analysis results, the research team aimed for a sample size of 357 to 400.
When recruiting participants for this study, the Information Sheet and Consent Form approved by the Ethics Committee of the researchers’ organization were provided as they are. These two documents emphasized that the collected data would be used for scientific research only, the anonymity of the respondents is assured since no individual could be identified from their responses, and the information gathered would be kept confidential by the research team.
In the recruitment message of the survey, the requirement of being a current hotel front desk employee has been specified to facilitate the screening process. In addition, while doing the questionnaire, all participants were invited to do an occupation check twice, respectively at the time of starting and finishing the questionnaire, so their position of hotel receptionist could be double confirmed. Meanwhile, to avoid respondents’ inattentiveness, one attention check question with an instructed response item was added to the middle of the survey (Gummer et al., 2021). Apart from the occupation check and attention check, scenario authenticity check (Liu et al., 2023) and manipulation check (Wang et al., 2021) questions were also included.
At the stage of questionnaire distribution, a web link was sent to the potential participants, and every participant received a randomly assigned scenario. Participants were asked to assess the scenario, move to the main section of the questionnaire, and then answer several general questions. Before the full launch of the study, a pre-test was completed with 80 hotel staff (i.e., 10 employees per scenario*8 scenarios) to verify the questionnaire and identify any ambiguities (Y. Song et al., 2022b), following exactly the same procedure as the survey conducted with a larger number of employees.
Afterwards, the questionnaire was published online with the target sample size (i.e., 357–400) through Prolific. In total, 435 surveys were distributed. After removing the responses from 51 participants who failed the occupation/attention check or were excluded for other reasons such as finished the survey too quickly, 384 responses were retained for data analysis. This number falls within the range of the desirable sample size that the research team aimed to achieve.
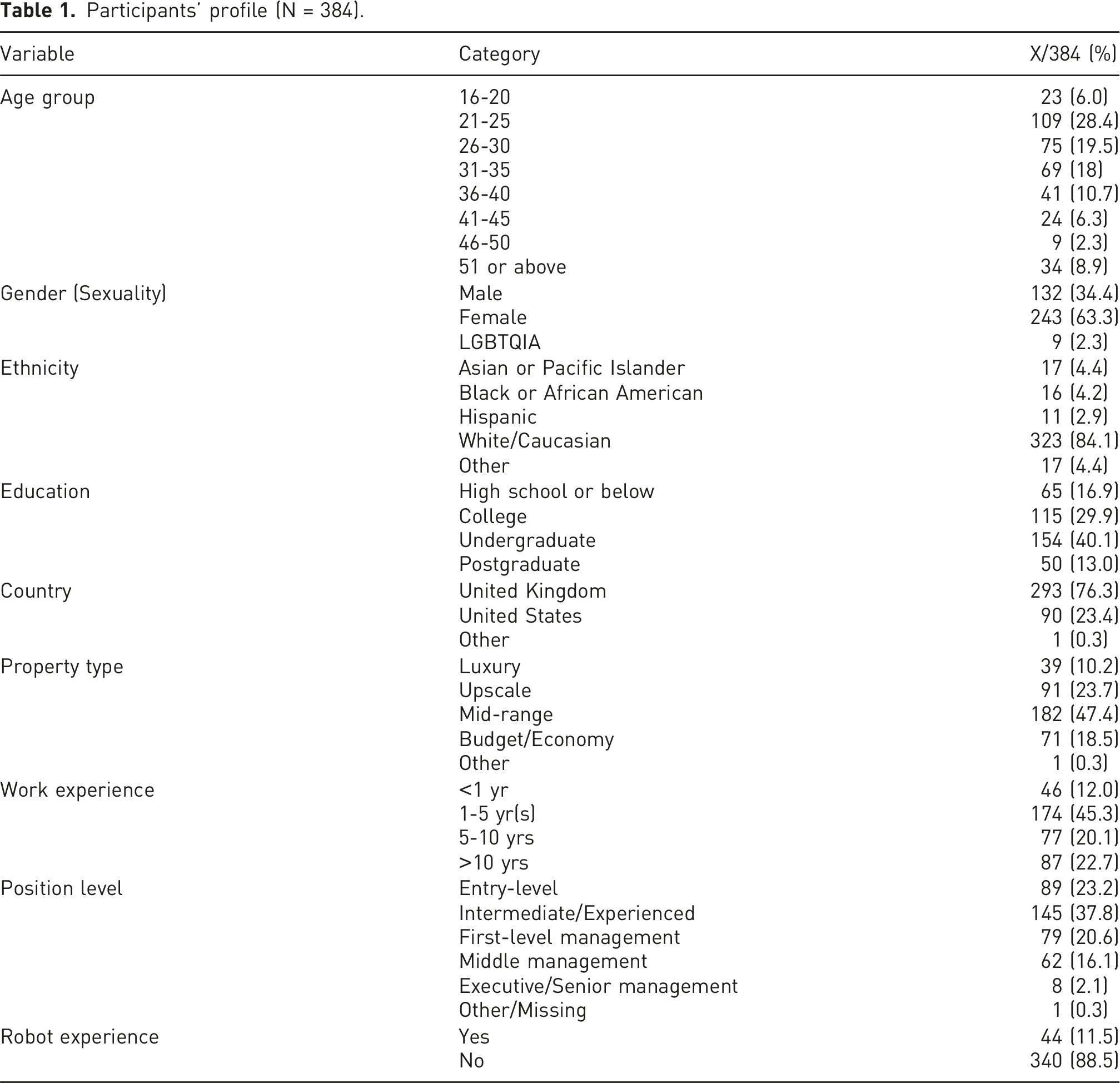
Participants’ profile (N = 384).
Data analysis
To test the influences of different product levels on employees’ perceived social presence and perceived job insecurity, a three-way analysis of covariance (ANCOVA) was conducted. To test the direct and indirect relationships between employees’ cognitions and cognitive well-being, Hayes’s PROCESS model 4 Hayes (2022) was used. In both tests, control variables were drawn from general information about the participants, including demographic characteristics, working experience, and robot experience (Song et al., 2022a; Wu et al., 2014).
Following the procedure of model 4, perceived social presence and perceived job insecurity were the independent variables, cognitive crafting was the mediator, and cognitive well-being was the outcome variable. Since PROCESS only allows one independent variable and one dependent variable each time, model 4 was run twice. The confidence interval was set as 95, and the number of bootstrap samples was 5000.
Results
Scenario authenticity check and manipulation check
According to the descriptive statistical results of the scenario authenticity test, 78.6% of the experiment participants indicated that they could imagine the scenario of human-robot collaboration with the provided description. Meanwhile, 90.6% of the respondents agreed that the provided picture illustrates the described robot image well. Thus, the experimental materials for this study have satisfactory authenticity and reliability (Liu et al., 2023).
The results of a series of independent sample t-tests indicate that the experimental manipulations of the three independent variables were successful. In terms of the core product, the ratings from participants who “worked” with robots equipped with basic functions and advanced functions were significantly different (M-basic = 6.14; M-advanced = 2.63; t (273.097) = 20.025; p < .001). Regarding the tangible product, respondents who had robot colleagues with machinelike and humanoid appearances also gave significantly different answers (M-machinelike = 6.31; M-humanoid = 3.38; t (311.903) = 17.621; p < .001). When it comes to the extended product, there was a statistical significance between the responses from participants who received verbal entertainment (i.e., telling a joke) and non-verbal entertainment (i.e., dancing with music) (M-verbal = 5.89; M-non-verbal = 3.19; t (316.604) = 14.821; p < .001).
The main and interaction effects of product levels on employees’ cognitions
When running ANCOVA, the core, tangible and extended product levels, and combinations thereof were used as predictors, so how each individual product level influenced employees’ cognitions, and whether there were any two- or three-way interaction effects between/among product levels could be investigated thoroughly.
ANCOVA results.
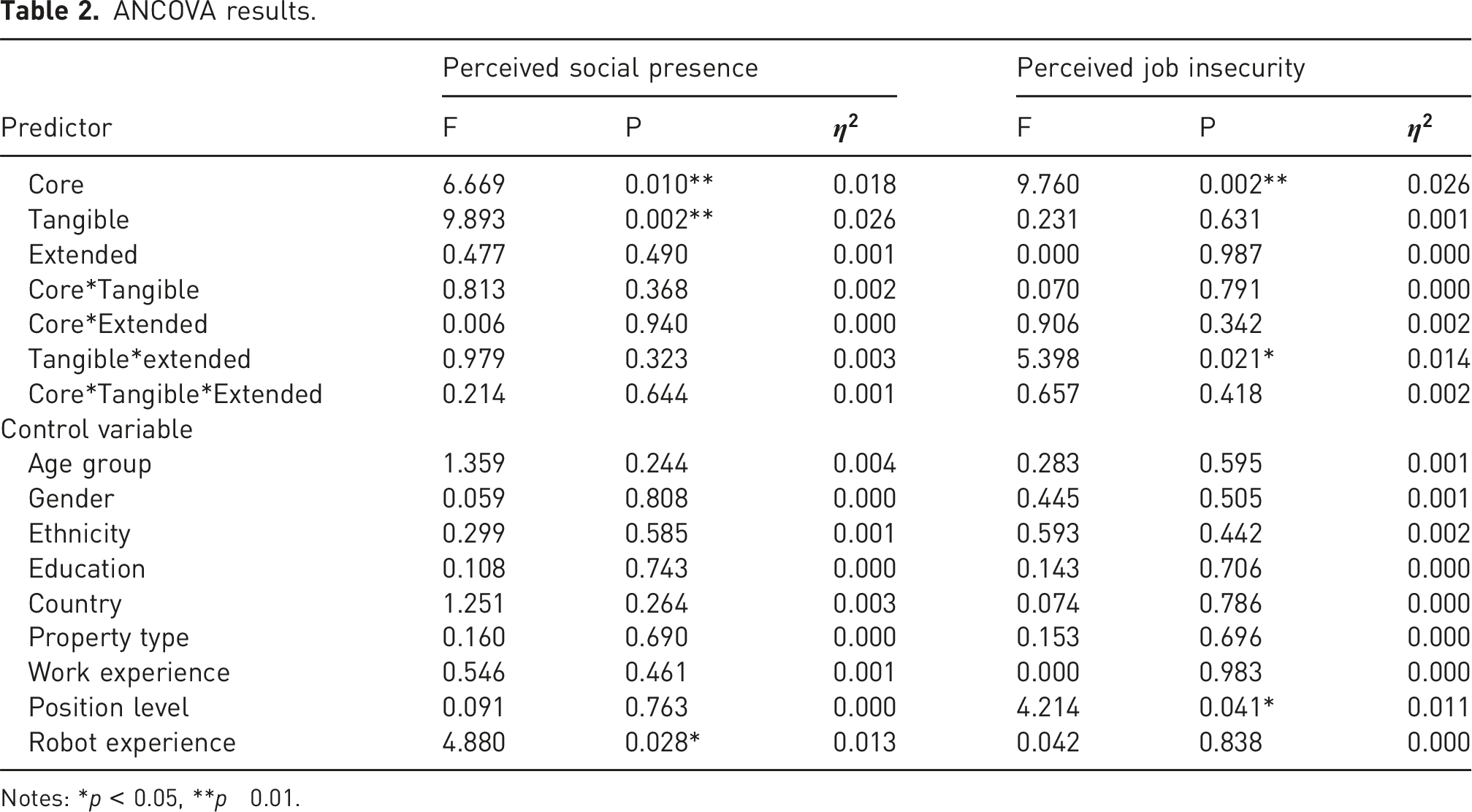
Notes: *p < 0.05, **p ≤ 0.01.
Regarding employees’ perceived job insecurity, only the core product showed a significant influence (M-advanced = 4.026; M-basic = 3.479; F [1, 367] = 9.760, p = 0.002). Hence, H2 was supported. Surprisingly, a significant two-way interaction effect between the tangible product and extended product was observed (F [1367] = 5.398, p = 0.021). Accordingly, service robots with advanced functions tended to create higher levels of job insecurity among employees. Meanwhile, as illustrated by Figure 3, relatively higher job insecurity would be created when humanoid robots providing non-verbal entertainment (i.e., dancing) and machinelike robots providing verbal entertainment (i.e., telling a joke), especially in the latter circumstance. Regarding the control variables, employees’ robot experience played a significant role in terms of affecting employees’ perceived social presence (F [1, 367] = 4.880, p = 0.028), while the effect of position level on employees’ perceived job insecurity was notable (F [1, 367] = 4.214, p = 0.041). Interaction effect between tangible product and extended product on perceived job insecurity.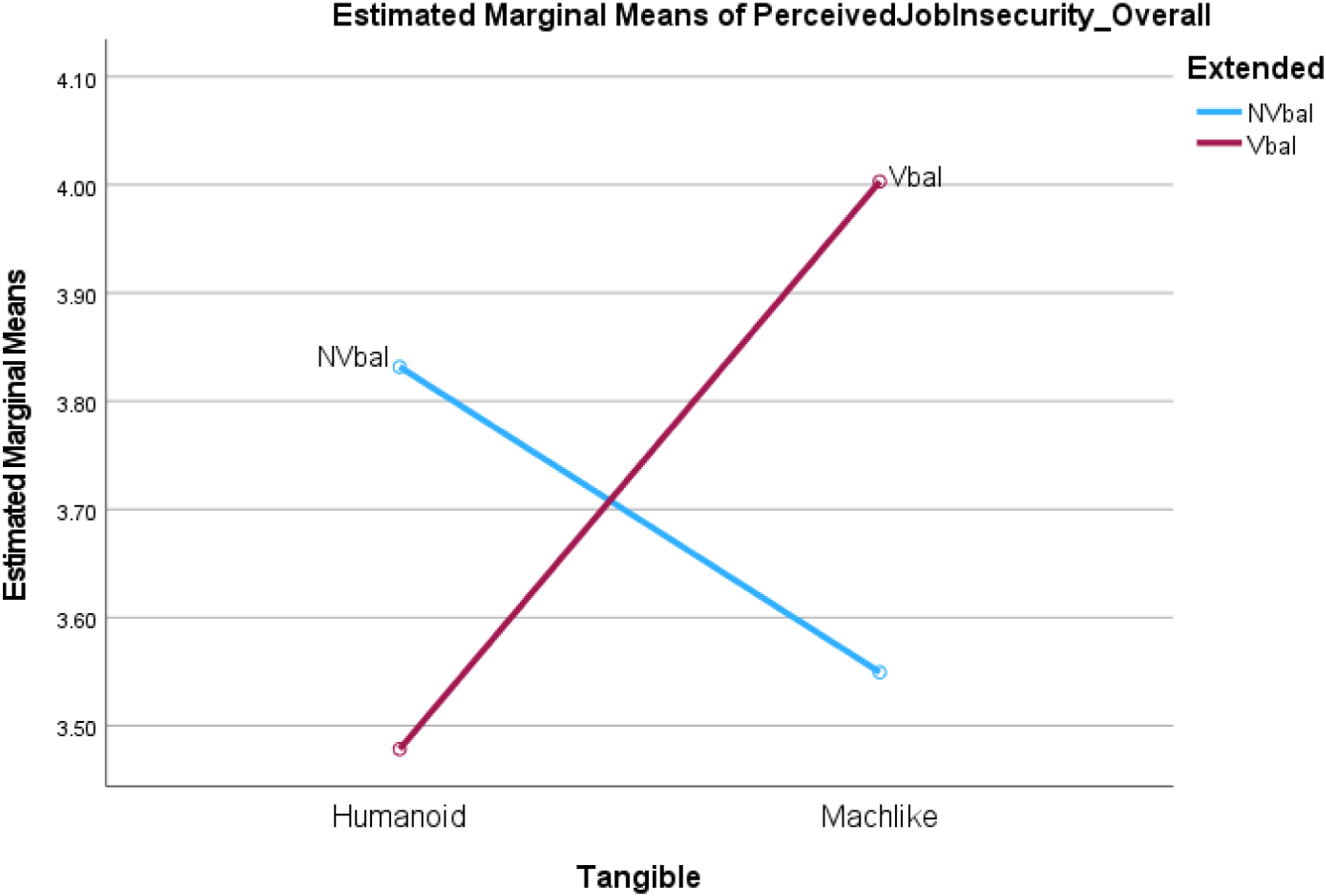
The relationships between employees’ cognitions and cognitive well-being
Haye’s PROCESS model 4 was applied to test H3-H6, exploring the relationships between employees’ cognitions and cognitive well-being. As Figure 4 illustrates, H3 and H4 were not supported because the direct relationships between perceived social presence/job insecurity and cognitive well-being were not statistically significant. Mediating effect of cognitive crafting on the relationship between perceived social presence/perceived job insecurity and cognitive well-being.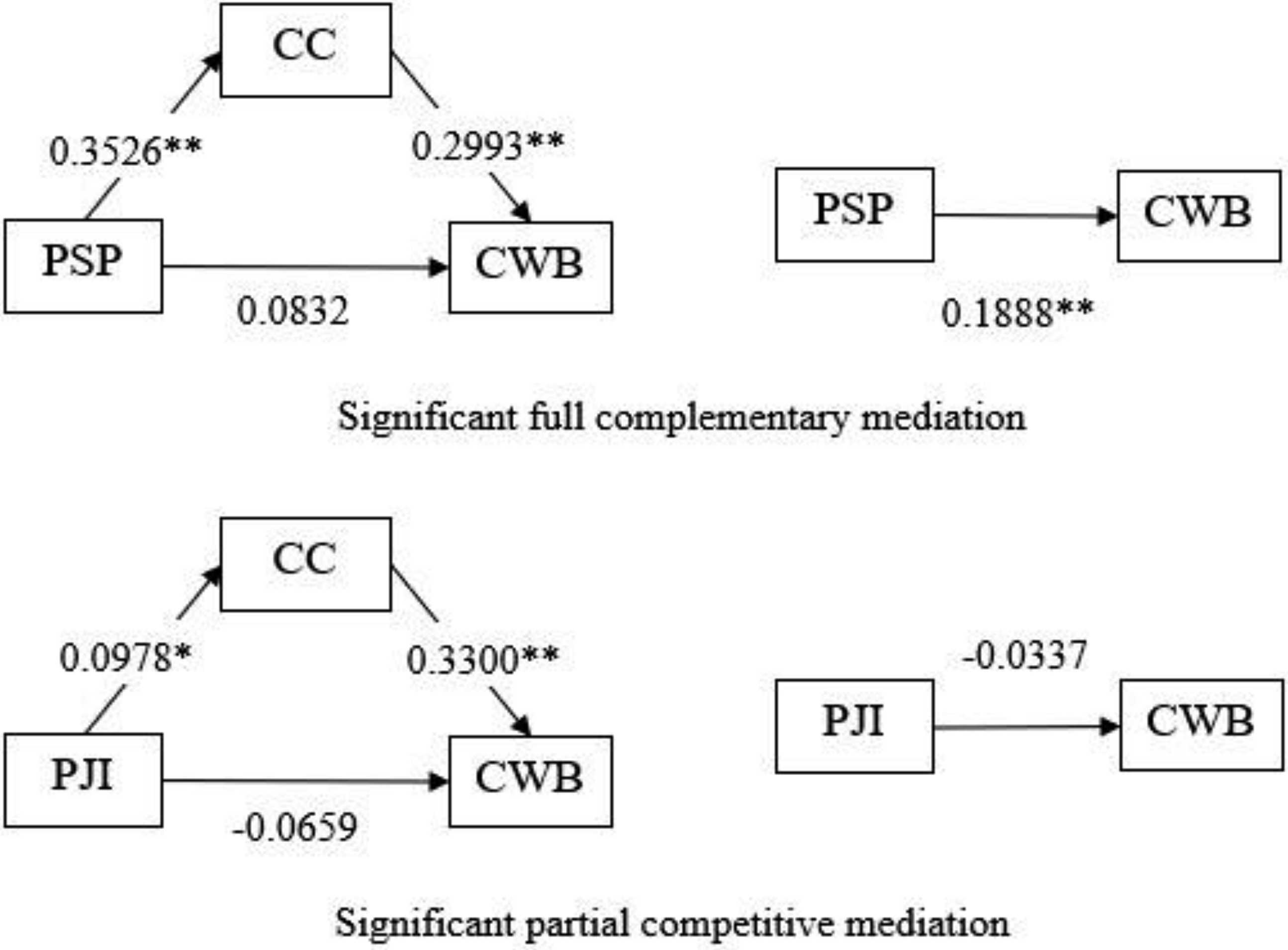
Regarding the mediating effects of cognitive crafting on the relationship between perceived social presence/perceived job insecurity and cognitive well-being, both were statistically significant (PSP on CWB: coeff = 0.1056, 95% CI 0.0563 to 0.1635; PJI on CWB: coeff = 0.0323, 95% CI 0.0001 to 0.0695). Therefore, H5 and H6 were supported. Whether the significant effect is partial or full depends on the significance of the direct and total effects, and the mediation could be either complementary or competitive, depending on whether the signs of direct effect and indirect effect are consistent or different (Fawad, 2023; Hayes, 2012). Regarding the control variables, both age (p = 0.0384; 95% CI 0.0044 to 0.1580) and country (p = 0.0359; 95% CI -0.4877 to −0.0167) played significant roles in the relationships between employees’ cognitions and cognitive well-being.
Discussion and conclusion
To summarize, different product levels of service robots influenced hospitality employees’ cognitions toward human-robot collaboration in different ways. Specifically, both the core and tangible products had significant influences on employees’ perceived social presence. Meanwhile, only the core product significantly influenced perceived job insecurity, while the tangible product and extended product presented a significant interaction effect. Unexpectedly, both perceived social presence and perceived job insecurity did not show significant direct effects on employees’ cognitive well-being. However, the indirect relationships between perceived social presence/perceived job insecurity and cognitive well-being through cognitive crafting were found to be significant. As for the hypotheses, H1, H2, H5 and H6 were supported, H3 and H4 were not supported.
Theoretical implications
By using a multi-theoretical lens, two of the fundamental theories for this research, namely the product level theory (Kotler and Armstrong, 2010) and the job demands-resources (JD-R) model (Bakker and Demerouti, 2007) are enriched and extended by each other. By scrutinizing the three product levels and capturing the duality of human-robot collaboration, how robot product level(s) could create job resources/demands are unveiled. These not only address the previous research gap of lacking systematic frameworks regarding robot adoption from a product design perspective (Ma et al., 2021), but also respond to the call for studies on investigating robotic applications among hospitality employees through a comprehensive view (Xu et al., 2023).
The findings of this research suggest that both the core and tangible product levels significantly influenced employees’ perceived social presence, thus contributing to job resources. Regarding the influence on perceived job insecurity, only the core product presented a significant role, while there is an interaction effect between the tangible and extended product levels. Thus, the more competent the robot was, the higher level of job insecurity is created for employees, and this finding agrees with what was claimed by Paluch et al. (2022). Hence, this study exhibits the connection between robot product levels and the duality of human-robot collaboration. Specifically, the former illustrates the origins of the positives and negatives of working with robots, and the latter explains why not all robot product levels would work favorably, challenging the postulation embedded in the “whole-product concept” (Schmidt, 2010).
Moreover, this study extends the media equation theory (Reeves and Nass, 1996). It shows robot attributes that are similar to human features and could make employees feel surrounded by real human colleagues refer to not only humanoid appearance but also advanced functions. However, the uncanny valley theory proposed by Mori et al. (2012) was not evidenced in this research. It seems that employees were happy to work alongside a humanoid robot with an image that is close to human face and did not perceive it negatively. To explore this further in future study, it is encouraged to use varied robot image such as male receptionist instead of a female counterpart as the robot image was manipulated for the experimental purpose in this research.
Among the control variables, the effect of robot experience on perceived social presence was statistically significant. As Song et al. (2022a) discussed, a possible explanation for this might be the fact that robotic applications are still in their infancy in today’s hospitality industry, and according to the participants’ profile, a vast majority of the respondents did not have robot experience before completing the experiment. Therefore, employees’ robot experience counted more than the differences in their demographic characteristics and working experience. Position level served as another significant control variable. In line with previous research (e.g., McClure, 2018), employees that worked at relatively lower positions normally had a stronger sense of job insecurity while working with service robots, due to the fear of being threatened or replaced. Thus, unlike previous customer-focused studies suggesting that individuals with different demographic characteristics such as age (Ayyildiz et al., 2022), gender (Cameron et al., 2018), and education (Zhong et al., 2021) would perceive robotic applications differently, the present research revealed the significant roles of robot experience and position level in affecting employees’ perspectives on human-robot collaboration.
Interestingly, the significant relationship between job demands/resources and workplace well-being revealed in previous research (e.g., Ndengu and Leka, 2022) was not validated in this study, since the direct relationships between perceived social presence/perceived job insecurity and cognitive well-being were shown as insignificant. This inconsistency calls for further investigation into the relationship between job demands/resources and the specific aspect of workplace well-being (i.e., affective, cognitive and eudaemonic, Culbertson et al., 2010) in different contexts (i.e., human-human interaction vs human-machine interaction). Because of the difference in the scope of previous studies and this research, it is believed that the different dimensions in well-being (i.e., evaluative & affective, Claes et al., 2023) and whether the job demands/resources are derived from interpersonal (e.g., Radic et al., 2020) or human-robot interactions would affect the significance of the relationship differently.
However, the indirect relationships between job demands/resources and cognitive well-being through cognitive crafting were found to be statistically significant. Through the process of “adjusting the way of viewing their work”, the positive effect of social presence on employees’ cognitive well-being could be manifested and the negative effect of job insecurity could be impeded, and both would facilitate human-robot collaboration. This corroborates what was discovered previously (Han, 2023; Signore et al., 2024), indicating job crafting is highly related to employee well-being.
Practical implications
In this study, it has been found that the core, tangible and extended robot product levels respectively referring to robot function, robot appearance, and extra value of the robot not only influence employees’ perceived job duality but also affect work outcomes such as workplace well-being. Applying robotic applications in current hospitality sectors may not be a hundred percent favorable and actions should be taken at the discretion of a number of stakeholders including policymakers, hotel managers, frontline employees as well as robot designers & manufacturers.
As the stakeholder overseeing the operation of entire hospitality industry, it is expected that policymakers can supervise the introduction of service robots carefully, provide clear guidance for hotel operators and protect the rights of human employees whenever needed. For instance, having hospitality employees surrounded by robot colleagues that are very similar to their real human co-workers may be helpful in promoting human-robot collaboration, but it might also trigger the fear or anxiety of being replaced and unemployed. To help employees embrace the advantages and mitigate the threats of advanced technologies, encouraging hotel operators to adopt service robots with a humanoid appearance (i.e., close to a human face) but avoid advanced functions (i.e., checking in/out customers), at least at the outset, might be a good idea. Utilizing the interaction effect of the tangible and extended products, a piece of research-based advice such as to avoid machinelike robots that are able to have verbal interactions with people might be helpful in alleviating employees’ perceived job insecurity. Furthermore, policymakers may also have the responsibility to inform the robot designers & manufacturers of the robot product levels, particularly the existence of tangible and extended products in addition to the core product, so the three product level offerings would be considered holistically and even customized for specific demands when robots are being designed and manufactured.
From the perspective of hotel managers, involving a non-human colleague as part of the service team is inevitably challenging, especially for employees that normally work in a human-dependent and labor-intensive industry. Firstly, hotel managers’ transformational leadership is extremely important in the circumstance of encountering newly introduced technology since employees would feel encouraged, inspired and motivated when working with a leader who is not afraid of making changes and embracing challenges actively (UMass Global, 2024). Importantly, to cultivate intelligent staff in the era of Hospitality 5.0 (Pillai et al., 2021), training sessions held on a regular basis for the purpose of reskilling and upskilling are necessary so employees’ skills can be enhanced and improved, and their confidence can be built along the way (Wu et al., 2025). Additionally, taking the significant control variables discovered in this research into account, it is suggested that managers consider employees’ current position level (i.e., junior vs senior) as well as whether they are equipped with previous robot experience or not, and then determine the level of robot involvement accordingly.
Being responsive to hotel managers’ transformational leadership and regular offerings of learning opportunities, employees working at the hotel frontline are expected to have awareness and take actions during the process of transitioning to human-robot collaboration. Service robots are introduced with the intention of providing a more supportive and enjoyable service landscape, and employees should proactively focus on enhancing and improving their capabilities to meet the requirements for higher standards in service. Applying the significant role of cognitive crafting found in this research, reskilling and upskilling are likely to strengthen the ability of “adjusting the way of viewing their work” because employees probably would view their work more positively if being equipped with adequate knowledge of how to make full use of their robot counterparts. Simultaneously, by handing over the 3D (i.e., dirty, dangerous and dull) tasks to robots, advancing soft skills such as interpersonal communication, problem solving and critical thinking have become extremely important for employees, since delivering extraordinary service to customers still relies upon humans that have feelings, empathy and emotions (Huang et al., 2019). At this stage, human employees are still at the center of service delivery, regardless of the development of technology.
As regards the design and manufacturing of hospitality service robots, this research also provides direction. Utilizing the significant roles of the three robot product levels, robot designers and manufacturers can produce robots for their clients accordingly, before customizing the robot for any specific requests. For example, because the robot tangible product level is of paramount significance in enhancing perceived social presence and can generate job resources among employees, a smiley humanoid robot is likely to be very welcome at hotel front desk. Responding to the recommended actions from policymakers, designers are expected to consider the integration of tangible and extended products carefully and find a balance between these two. It is important since employees’ job insecurity may be generated by interacting with a talkative machinelike robot or a humanoid robot dancer. Undeniably, the birth of a desirable robot requires contributions from different stakeholders and introducing a new member to the front desk team that suits the needs of both employees and customers takes time. To address this challenge, introducing a prototype of the robot and collecting feedback from different stakeholders before the full launch of the robotic applications may be necessary. It is believed that doing things in steps would accelerate the progress of achieving the ultimate goal.
Limitations and future directions
This study is not free of limitations. As discussed in the Method section, scenario-based experimental design was employed for this research, which means every participant was encountering a hypothetical scenario of human-robot collaboration when answering the questionnaire. Although this is the best option at that time, there is still a discrepancy between the hypothetical and the actual of the eight different scenarios. To address this limitation, the application of virtual reality (VR) should be helpful in the future since the immersive experience will allow the participants to feel the experimental conditions better (Bogicevic et al., 2019), and the scenario of “working with a service robot” can be much more “real” if the respondents are not just imagining it.
Moreover, the cell size of the scenario was more or less compromised in this research, varying between 40 and 60 instead of being 50 as expected. Although the selected survey tool attempted to achieve a random assignment, a perfect and even distribution among the eight scenarios could not be guaranteed by the system. In future research, the research team will switch to a survey tool that allows monitoring and manual assignment behind the scenes, so the even distribution of the experimental scenarios could be guaranteed to a great extent.
Furthermore, the participants in this study were mostly young people from the UK and did not have any previous experience with service robots. As discussed in section 3.3. Data collection, this is the consequence of a tradeoff between what the research team aimed to approach and what Prolific could approach. Thus, the generalization of results from this study should be done with caution, and a more diversified group of respondents should be approached for future research. For instance, participants from countries such as China or Japan might be ideal since both are at the forefront of adopting service robots in today’s tourism and hospitality sectors. When saying the diversity of research participants, whether and how cultural differences influence hospitality employees’ perspectives on working with robots is a topic worth pursuing in the future.
Last but not least, this research focused on the front desk employees at hotels. To move forward, future studies may turn attention to the robot experiences of the employees from other hotel departments, for example, food & beverage or housekeeping, and perhaps broader service sectors such as airports and theme parks so the perspectives of more staff at frontline or even from the back of the house could be inspected.
Supplemental Material
Supplemental Material - The influence of human-robot collaboration on perceived job duality and workplace well-being: Hotel employees’ perspectives
Supplemental Material for The influence of human-robot collaboration on perceived job duality and workplace well-being: Hotel employees’ perspectives by Jingjing Xu, Aaron Hsiao, Sacha Reid and Emily Ma in Tourism and Hospitality Research.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Supplemental Material
Supplemental material for this article is available online.
Author biographies
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.