This article discusses a new approach for predicting and quantifying mechanically induced temperature oscillations in the coupled thermo-elasticity analysis of articulated mechanical systems (AMS). In this approach, the constrained equations of motion are solved simultaneously with discrete temperature equations obtained by converting heat partial-differential equation to a set of first-order ordinary differential equations. Dependence of the temperature gradients and their spatial derivatives on the position gradients, spinning motion, and curvatures is discussed. The approach captures dependence of the temperature-oscillation frequencies on the mechanical-displacement frequencies. The temperature field can be selected to ensure continuity of the temperature gradients at the nodal points. To generalize the AMS coupled thermo-elasticity formulation and capture the effect of the boundary and motion constraints (BMC) on the thermal expansion, the proposed method is based on integrating thermodynamics and Lagrange-D’Alembert principles. The absolute nodal coordinate formulation (ANCF) is used to describe continuum displacement and obtain accurate description of the reference-configuration geometry and change of this geometry due to deformations. A thermal-analysis large-displacement formulation is used to allow converting heat energy to kinetic energy, ensuring stress-free thermal expansion in case of unconstrained uniform thermal expansion. Cholesky heat coordinates are used to define an identity coefficient matrix for the efficient solution of the discretized heat equations. The approach presented is applicable to the two different forms of the heat equation used in the literature; one form is explicit function of the stresses while the other form does not depend explicitly on the stresses. Because of the need for using ANCF finite elements to achieve a higher degree of continuity in the coupled thermomechanical approach introduced in this article, the concept of the ANCF mesh topology is discussed.
The thermodynamics energy balance is used in the literature to obtain a general form of the heat partial-differential equation.1–5 This equation is function of the temperature gradients and their spatial derivatives defined in the current configuration. Capturing the effect of mechanically induced temperature oscillations due to the continuum spinning motion and large deformations requires accurate description of the geometry. Nonetheless, the literature lacks a Lagrangian approach for predicting and quantifying mechanically induced temperature oscillations in the coupled thermo-elasticity analysis of articulated mechanical systems (AMS). Consequently, there is no computational algorithm for solving constrained dynamic equations of motion simultaneously with the discrete temperature equations, which can be obtained by converting heat partial-differential equation to a set of first-order ordinary differential equations. If the rate of heat input to the continuum is not oscillatory, the only source of temperature oscillations is attributed to mechanical oscillations due to rotations and deformations. Because of the lack of AMS-coupled thermo-elasticity formulation, the dependence of the temperature gradients and their spatial derivatives on the continuum position gradients, spinning motion, and curvatures is not well understood and cannot be accurately quantified. Furthermore, dependence of temperature-oscillation frequencies on mechanical-displacement frequencies cannot be captured accurately without accurate geometry representation. To generalize AMS-coupled thermo-elasticity formulations and capture effect of boundary and motion constraints (BMC) on the thermal expansion, an approach based on integrating thermodynamics and Lagrange-D’Alembert principles is needed. Using Lagrange-D’Alembert principle is necessary for proper treatment of the BMC restrictions. Furthermore, because of the dependence of the temperature gradients on the curvatures, a finite element (FE) interpolation for accurate description of the reference-configuration geometry and change of this geometry due to deformations is required for correct prediction of the temperature oscillations.
To address these challenges, a Lagrangian approach approach for predicting and quantifying mechanically induced temperature oscillations in the AMS-coupled thermo-elasticity analysis is introduced. In this approach, the constrained equations of motion are solved simultaneously with the discrete temperature equations obtained by converting heat partial-differential equation to a set of first-order ordinary differential equations using FE interpolations. The dependence of the temperature gradients and their spatial derivatives on the position gradients, spinning motion, and curvatures is demonstrated. The approach captures dependence of temperature-oscillation frequencies on the mechanical-displacement frequencies. Furthermore, the FE temperature field can be selected to ensure continuity of the temperature gradients at the nodal points. The AMS coupled thermo-elasticity formulation is based on integrating thermodynamics and Lagrange-D’Alembert principles to capture the effect of BMC restrictions on the thermal expansion. The absolute nodal coordinate formulation (ANCF) is used to describe continuum displacement and obtain accurate description of the reference-configuration geometry and change of this geometry due to deformations. This can be conveniently achieved by using continuum-mechanics position gradients.6–9 To allow converting heat energy to kinetic energy, a thermal-analysis large-displacement formulation is used to ensure stress-free thermal expansion in the absence of BMC restrictions and forces. This is achieved by using a sweeping-matrix technique to eliminate rigid-body translational modes from thermal-displacement field. Efficient solution of the coupled constrained motion and heat equations can be obtained using Cholesky heat coordinates, which lead to an identity coefficient matrix of the discretized heat equations. Using Cholesky heat coordinates in the numerical implementation is important in cases in which the rate of heat energy input depends on the motion accelerations. In the special cases that may arise in contact and friction problems, using Cholesky coordinates leads to an optimum sparse matrix structure for the augmented form of the motion-heat equations.
Because of the dependence of temperature gradients and their derivatives on the position gradients and curvatures, using ANCF finite elements is necessary. In the literature, different ANCF elements with different coordinate types are introduced. In some of these elements, curvature coordinates are used leading to different continuity conditions at the element interface. It is suggested in some studies that the choice of coordinates can offer solution to the locking problems without addressing the issues of compliance and articulation of the ANCF mesh. More research is needed to distinguish between locking and mobility of the ANCF mesh. This important and new area of ANCF mesh topology is also discussed in this article because of its relevance to the degree of continuity and displacement frequencies that influence mechanically induced temperature oscillations.
Thermodynamics and motion equations
The principle of thermodynamics and time-rate of energy flow can be used to derive the heat equation and demonstrate its coupling with the motion equation. Crucial in developing this principle is the definition of the power of the stress force . There are two forms of the heat equation used in the solid-mechanics and FE literature. One form is not explicit function of the stresses, and the other form is explicit function of the stresses and rate of deformation tensor. The difference between the two forms can be attributed to two different definitions of the stress-force vector. Nonetheless, both forms of the heat equation exhibit clear geometric coupling with the equations of motion of the continuum. While this geometric coupling is the focus of this study, a discussion of the two different forms of the heat equation is presented in this section.
Motion and thermodynamics relationship
If is the position vector of a material point in the current configuration and is its absolute velocity vector, one has , where is the absolute acceleration vector. That is, . The partial-differential equation of equilibrium can be written as ,6–9 where is the mass density, is the vector of body forces, is the row vector , and is the symmetric Cauchy-stress tensor. Important to the discussion presented in this section is the fact that the stress-force vector in the motion equation is defined as .
Multiplying the partial-differential equation of equilibrium by the absolute velocity vector , one obtains . Substituting the identity into this equation leads to the force-power equation
In this equation, the power of the stress-force vector is defined as . This definition is based on using the stress-force vector that contributes to the continuum motion. At this point, distinction is made between and to allow explaining the difference between the two forms of the heat equation used in the literature.
The thermodynamics energy balance can be written as1–5
where is the thermodynamics energy at the microscopic level, is the rate of heat energy flow, is the power of the stress forces, and is the rate of external heat input. Equations 1 and 2 lead to the heat equation
Therefore, the continuum motion and temperature distribution are governed by the following coupled motion and heat equations:
The discretized form of the first equation, which is the partial-differential equation of equilibrium,6–9 can be obtained using approximation methods as described in the FE and multibody system (MBS) literatures.10–18 The motion of the continuum can be subjected to BMC which can be nonlinear functions in the generalized coordinates selected for the motion description.
Power of the stress forces
The temperature and displacement are independent fields despite coupling that may exist between them. Furthermore, independent interpolations are used for the two fields to obtain the discretized equations. The fact that the two fields are independent despite their influence on each other implies that temperature environment and motion can be controlled independently. For example, heating or cooling sources can be used to maintain constant temperature while the continuum is expanding (isothermal expansion). Therefore, the equations that govern the coupled thermomechanical systems must ensure the independence of the two fields.
The definition of the stress-force power is resulting from the partial-differential equation of equilibrium (Eq. 1). If is assumed equal to , the heat equation reduces to , which is not an explicit function of the stresses. This form of the heat equation is used in the literature to formulate the coupled thermomechanical problems. In some texts, however, the power of the stress forces is assumed . The relationship between the two expressions is , where is the velocity gradient tensor, which can be written as , where is the symmetric rate of deformation tensor and is the skew-symmetric spin tensor. Because is symmetric, one has . Therefore, , which upon substituting into the energy-balance rate equation leads to another form of the heat equation . The concern regarding this form of the heat equation is that the rate of internal energy becomes equal to zero in the case of uniform constant temperature. Temperature and motion coordinates, which can be coupled, can be varied independently, and therefore, creating temperature conditions that lead to zero requires further investigation that is beyond the scope of this study. This problem is attributed to the definition of the stress force and to whether should be interpreted as the rate of total deformation energy or the rate of surface-stress energy. It can be shown that the volume integral of leads to the power of the stress forces on the boundary, which is distinguished from the power of the stresses inside the continuum. The appendix of the article provides an argument for using to define the heat equation used in thermodynamics texts. Some references on thermo-elasticity, on the other hand, assume the other case in which .
Boundary and internal stresses
The discretized form of the motion equation allows for including prescribed stresses on the continuum surface. Therefore, one may argue that includes the effect of both internal and surface stresses. In this case, the heat equation is used, with the understanding that it is derived using the power of the stress forces , which also includes the effect of the surface stresses since the effect of the boundary-surface stresses cannot be ignored in the formulation of the motion equation.9 This can be demonstrated by multiplying the partial-differential equation of equilibrium by the virtual change , where is the position vector of an arbitrary material point in the current configuration. This leads to . One can write the last term in this equation as . Using this identity in and following the derivation presented on Page 106 of Reference,9 one obtains , where is the normal to the surface, s and v are, respectively, the area and volume in the current configuration, and is the matrix of position-gradient vectors. The term can be expressed in terms of the strains demonstrating that both internal and surface stress forces are accounted for.9 This simple analysis demonstrates that using as the stress-force vector does not exclude the effect of the boundary-surface stresses, which need to be differentiated from the surface traction defined at the body interior and used to develop Cauchy-stress formula.
Temperature partial-differential equation
Because this study is mainly focused on the geometric thermomechanical coupling, both forms of the heat equations can be written as , where . If , one obtains the form of the heat equation which is not explicit function of the stresses; otherwise the second form of the heat equation which is explicit in the stresses is obtained. Therefore, the analysis presented in the remainder of this study is applicable to both forms.
The heat equation can be written in terms of the temperatures by using Fourier's law of heat conduction , where is the coefficient of thermal conductivity which has units Watt/(m.K). Furthermore, the thermodynamics energy can be written in terms of the change in the temperature using the relationship , where is the specific heat. It follows that , and the heat equation can be written as , where . Therefore, the dynamics and temperature distribution of the continuum are governed by the two-coupled partial-differential equations:
The discretized forms of these two-coupled equations and the numerical procedure for obtaining their solution will be discussed in later sections of this article.
Mechanically induced thermal oscillations
The heat equation can be written more explicitly in the following form:
This explicit form of the heat equation demonstrates the dependence of the temperature on the reference-configuration geometry and mechanical displacement that can include rigid-body rotations. This dependence can be the result of the first three terms on the right-hand side of the preceding equation, and . Changes in position gradients due to rigid-body rotations and/or deformations contribute to changes in the first three terms. The term that includes prescribed rate of heat energy inputs can be function of the system dynamics as in case of contact and friction problems. Given rate of heat generated included in and vector of motion coordinate at a specific time point t, the preceding equation can be solved using approximation methods to determine temperature as function of time at an arbitrary material point.
Position gradients and geometry
If the thermal conductivity coefficient within an element is assumed independent of the spatial coordinates, the spatial derivative on the right-hand side of the heat equation can be written as
Let and be, respectively, the spatial coordinates in the straight and reference configurations before displacements. The reference configuration defines the initial curved geometry, while the straight configuration defines the straight un-curved geometry used to perform the integration in the FE analysis. The relationship between the two configurations is defined by the constant matrix . It is clear that
where . That is, position-gradient matrix accounts for the reference-configuration geometry that can be conveniently described using ANCF position gradients that allow for local shape manipulation.19
Derivative evaluation
For efficient computer implementation, the spatial derivatives on the right-hand side of the heat equation need to be correctly evaluated to capture accurately effect of the reference-configuration geometry and deformation on the temperature oscillations. To this end, one can write , , where is the kth row of the position-gradient matrix . It follows that and , where is the kth column of . Because for an arbitrary scalar a, , one can write
In this equation, , and , for any scalar or vector a. In a more explicit form, the preceding equation can be written as
where . Therefore, all the elements on the right-hand side of the preceding equation can be found from the matrix multiplication , where is the symmetric matrix
Similarly, all the elements , on the right-hand side of Eq. 10 can be found from the product , where .
Inverse of position-gradient matrix
The method used to evaluate , is explained in this subsection. The differentiation of the inverse of the matrix of position-gradient vectors can be avoided by using the identity . Differentiating this equation with respect to and keeping in mind that is always nonsingular matrix leads to , which shows that
That is, can be evaluated from the curvature matrix
Therefore, the proposed coupled thermomechanical Lagrangian approach requires evaluation of second spatial derivatives of both temperature and the position coordinates. This is necessary to capture the effect of the geometry change on the heat equation. It is also clear that the resulting equations are nonlinear functions of the deformation coordinates that define the shape of the continuum.
Summary
The second derivatives on the right-hand side of the heat equation can be written as
where
As previously mentioned, elements of the first equation in Eq. 15 be obtained by forming a matrix whose columns are defined by the vector
Using these definitions, one can write
where is the kth row of the matrix . Using the definition of and , one can write
Using these definitions for and allows efficient implementation of the heat equation in the coupled thermo-elasticity formulation introduced in this article. It is clear that motion frequencies influence the solution of the heat equation leading to mechanically induced temperature oscillations that contain frequencies defined by the mechanical oscillations.
Discretized heat equations
FE discretization methods can be applied to the heat partial-differential equation to obtain set of first-order-ordinary differential heat equations, which can be integrated with MBS algorithms to solve the coupled thermomechanical problem. Using an approach similar to the ANCF for the temperature interpolation, continuity of the temperature gradients and/or higher derivatives can be ensured. One can develop new ANCF temperature elements or use technique of separation of variables and write the temperature as
where is space-dependent shape-function matrix, and is time-dependent temperature-coordinate vector. The preceding equation and the ANCF displacement field lead to
While is a constant matrix, depends on the ANCF displacement coordinates. The interpolation of can be selected to ensure continuity of , , and/or higher derivatives. The temperature and ANCF-element displacement meshes can be designed to have the same number of nodes and element sizes to simplify the computer implementation.
First-order ordinary heat equations
Using the interpolation , one can write and . Multiplying the heat equation by , using and its time and spatial derivatives, pre-multiplying by , and integrating over the volume, one can convert the partial-differential heat equation to the following set of first-order ordinary differential equations:
where
In this equation, and V are, respectively, mass density and volume in the straight configuration. While the matrix is nonlinear function of the motion coordinates, the coefficient matrix is constant. The matrix of position-gradient vectors accounts for both deformations and reference-configuration geometry, demonstrating dependence of the integrals in the preceding equation on the initial geometry, deformations, and finite rotations.
Numerical evaluation of the integrals
While vectors and are nonlinear functions of the deformation coordinates, constant vectors and matrices can be identified and evaluated at a preprocessing stage. Such integrals can be efficiently evaluated using quadrature integration methods to ensure generality of the algorithm. To this end, the heat equations are written as , where
Numerical integration methods allow using heat coefficients defined by empirical formulas or in a tabulated form. If the coefficient of thermal conductivity , mass density , and specific heat capacity are assumed constant within the element, the second and third integrals in the preceding equation can be written as
Evaluating integral requires having the inverse of , as previously discussed. The resulting integral accounts for both initial geometry and change of the geometry due to deformation since
as discussed previously.
Cholesky heat coordinates
In some applications, mechanical energy dissipations due to contact and friction can lead to the dependence of the heat equation on the motion accelerations. If the rate of heat energy input becomes function of the motion accelerations, having sparse matrix structure can contribute significantly to the efficient solution of the coupled thermo-elasticity problem. An efficient general implementation can be achieved by applying Cholesky transformation to solve the first-order ordinary differential heat equations for a given set of initial coordinates . Using Cholesky heat coordinates leads to an identity coefficient matrix associated with these coordinates. The Cholesky coordinate transformation can be made because the matrix is symmetric and positive definite. Cholesky decomposition of this matrix can be used to define the Cholesky heat coordinate transformation , which upon substituting into and pre-multiplying by leads to . Since is constant, the transformation is evaluated only once in advance of the dynamic simulations.
Effect of boundary and motion constraints
In case of stress-free thermal expansion, there is no oscillations in the position gradients. Consequently, there are no mechanically induced temperature oscillations. This is not the case if there is variation in the temperature gradients or if the continuum is subjected to BMC restrictions. The resulting stress oscillations lead to mechanically induced temperature oscillations that have the same frequency contents that characterize the elastic displacements and/or rigid-body spinning motion. The heat equation formulated in the current configuration demonstrates clearly the dependence of temperature on these two types of mechanical displacements; deformation and rotation. Using ANCF finite elements, the formulation of the heat equation can capture accurately arbitrary reference-configuration curved geometry. The vector is written using ANCF approach as , where and are, respectively, ANCF-element shape-function matrix and nodal coordinate vector.19 Therefore, in the coupled thermomechanical formulation proposed in this investigation, the partial-differential heat equation is solved simultaneously with the constrained MBS equations of motion, which are formulated using Lagrange-D’Alembert principle and can be written as and , where is the system mass matrix, is the MBS coordinate vector that includes the coordinate vector used to describe the displacement of ANCF bodies and other coordinates used to describe the displacements of rigid bodies and bodies modeled using the floating frame of reference (FFR) formulation, is the vector of constraint functions, is the constraint Jacobian matrix, is the vector of Lagrange multipliers, is the applied-force vector that includes external, elastic, and quadratic-velocity inertia forces, and is the vector resulting from differentiation of the constraint equations twice with respect to time excluding terms which are linear in the accelerations.16,20,21 Therefore, in this investigation, the following three matrix equations are solved simultaneously:
This mathematical model is based on integrating Lagrange-D’Alembert principle for the treatment of the constraint equations and the principle of thermal analysis with the goal of capturing the effect of the geometric and kinematic changes on the temperature gradients. The effect of the heat energy on the constrained system dynamics is considered by using the thermo-elasticity displacement formulation, which is based on converting the heat energy to macroscopic kinetic energy.22 By using a sweeping-matrix technique to eliminate rigid-body translations from thermal expansion modes of displacements, the thermal-analysis displacement approach ensures stress-free thermal expansion in case of uniform temperature and in the absence of BMC restrictions. Four configurations are used in the thermo-elasticity displacement formulation: straight, reference, thermal expansion, and current configurations.21–23 Using these four configurations, the thermal-analysis large-displacement formulation is based on the multiplicative decomposition of the matrix of position gradients.24–33 Furthermore, the formulation presented in this study can be used for the analysis of bodies modeled using the FFR formulation, using FFR/ANCF elements,34 and bodies with complex geometries and joints using the concept of the ANCF reference node.17,35,36 Matrix sparsity ensures efficient numerical solution of the resulting coupled thermo-elasticity equations.37
As explained in,22 the increase in temperature of the flexible bodies due to heat energy defines thermal displacement, which is used to formulate a kinetic energy function. The part of the heat energy dissipated to the environment does not contribute to increasing the flexible-body temperature, and this part of heat energy is not considered in this study. Furthermore, there is no thermal expansion of rigid bodies, which do not deform; therefore, the focus in this study is on ANCF bodies and on heat conduction. Heat convection and radiation are not considered in this study. Because the thermal expansion is described using the deformation coordinates and the MBS joint constraints are formulated in terms of the deformation coordinates, the heat energy has direct influence on the joint constraint equations.
ANCF mesh topology
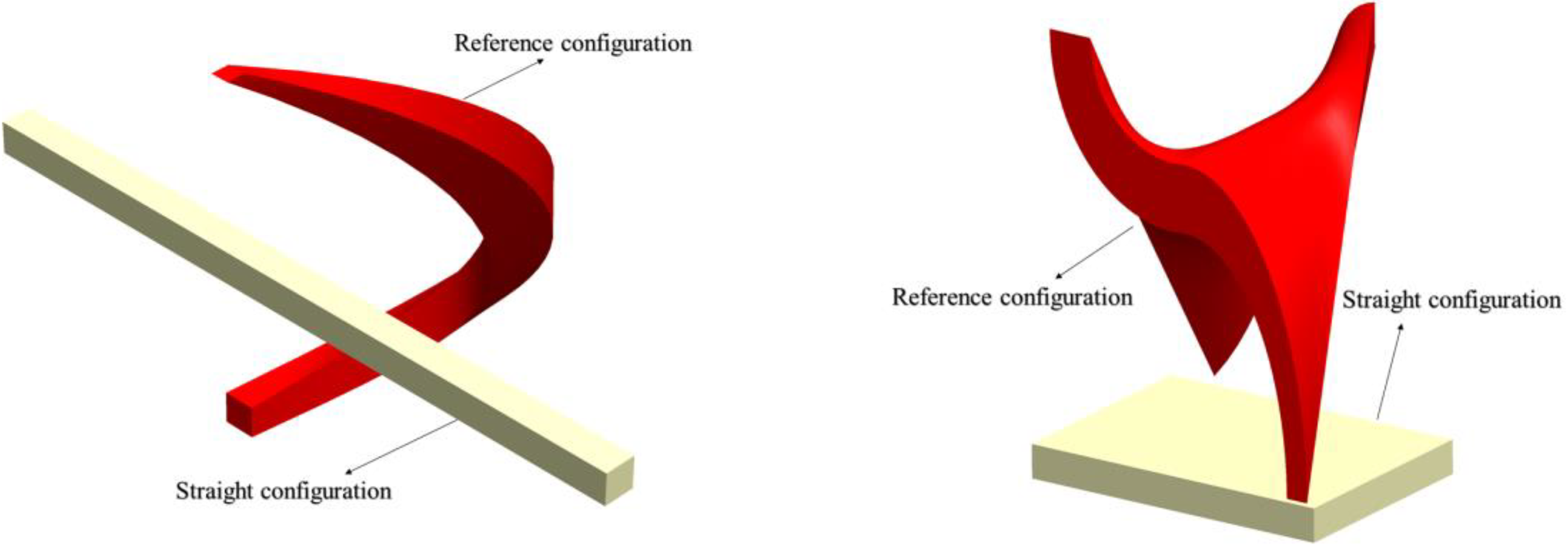
The analysis presented in the preceding sections demonstrates the need for using geometrically accurate analysis approach to predict correctly the influence of the mechanical oscillations on the temperature and its gradients. It is shown that the temperature gradients and their derivatives depend on the position gradients and curvature vectors. For this reason, the approach used in the deformation analysis can have significant effect on the accuracy of the solution of the coupled thermomechanical problem. ANCF finite elements can describe accurately reference-configuration geometry and change of this geometry due to deformations. These elements have been widely used in the nonlinear analysis of a wide range of challenging applications, some of which have complex geometry.38–158Figure 1 shows examples of geometries that can be obtained with two planar-beam and two spatial-plate elements.19 The complex shapes, shown in the figure and obtained using ANCF elements, demonstrate the potential of using this approach in numerous applications including morphing applications.
In the literature, different ANCF elements with different coordinate types are introduced. In some of these elements, curvature coordinates are used leading to different levels of continuity conditions associated with different coordinates at the element interface. It was suggested in some studies that the choice of coordinates can offer solution to the locking problems without addressing the issues of compliance and articulation of the ANCF mesh. Locking is an issue that cannot be ignored in all FE formulations, including the conventional formulations. Nonetheless, interpretations of locking and their relationship to the choice of the ANCF coordinates are important issues that will require thorough future investigations. This is mainly because in case of ANCF elements, different choices of coordinates lead to different compliances and articulation freedom. For example, given an interpolating polynomial for the position vector of an arbitrary point on the element, one can select different gradient and/or curvature coordinates as nodal coordinates to replace the polynomial coefficients. For one element, different choices of coordinate sets are related by a linear map, and therefore, regardless of the coordinates selected, a one-element mesh has the same response and the solution contains the same frequencies. However, when elements are connected to form multi-element mesh, the joints between elements are different, and different meshes that use different types of coordinates do not have the same response because of the type of joints used to connect the elements. That is, while one-element meshes based on different coordinate types lead to the same solution for any loading due to using the same interpolating polynomials, multi-element meshes can have different responses and can have different levels of stiffness in response to different loadings.
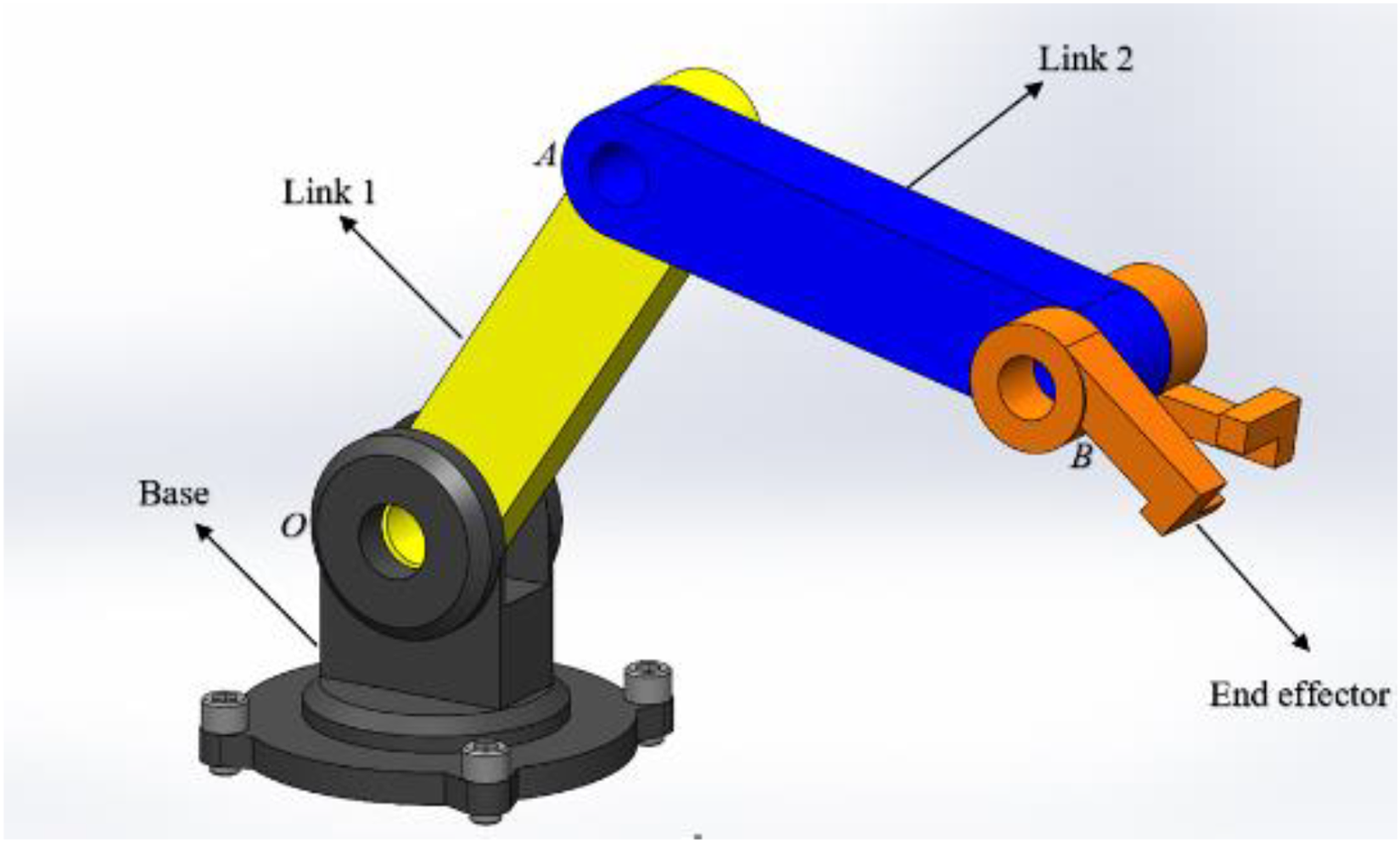
This important concept of the ANCF mesh topology can be better explained using the articulated-robot system shown in Figure 2.159 The links, which are connected by pin joints cannot be translated relative to each other and cannot have relative rotations about axes perpendicular to the joint axes regardless of the load applied. The pin joint does not transmit moment, and one link is free to rotate with respect to the other without resistance if the joint does not have compliance or friction. The same concept can be applied to ANCF elements to have proper interpretations of locking. Imposing higher degree of continuity increases the stiffness in certain directions, while excluding some gradients as nodal coordinates reduces stiffness in other direction. Therefore, choice of the type of the ANCF coordinates can be viewed as mesh-topology design that can be appropriate for some loading conditions and can lead to stiffness problems in other loading scenarios. However, not using all the gradients as nodal coordinates leads to rotation, strain, and stress discontinuities. More research is needed to distinguish between locking and mobility of the ANCF mesh. This important and new area of ANCF mesh topology is relevant to the coupled thermomechanical approach in which temperature and its spatial derivatives depend on the position gradients and their spatial derivatives including curvature vectors.160
This article presents a Lagrangian approach for predicting and quantifying mechanically induced temperature oscillations in the AMS coupled thermo-elasticity problem. Constrained motion equations and discrete temperature equations obtained from heat partial-differential equation are solved simultaneously to capture the coupling between temperature and mechanical displacements. The discretized temperature first-order ordinary differential equations are obtained from the heat partial-differential equations using FE interpolations that can be selected to ensure continuity of temperature gradients. Dependence of temperature gradients and their spatial derivatives on position gradients, spinning motion, and curvatures and dependence of temperature-oscillation frequencies on mechanical-displacement frequencies are captured. The AMS coupled thermo-elasticity formulation, based on integrating thermodynamics and Lagrange-D’Alembert principles, captures BMC effect on the thermal expansion. ANCF finite elements are used to describe accurately large displacement, reference-configuration geometry, and geometry change due to deformations. Conversion of the heat energy to kinetic energy can be achieved by using a thermal-analysis large-displacement formulation to ensure stress-free thermal expansion in case of unconstrained uniform thermal expansion.22 This thermal-analysis large-displacement formulation is based on the multiplicative decomposition of the matrix of position gradients.24–33 Cholesky heat coordinates are used to define an identity coefficient matrix when solving discretized heat equations.161 The formulation presented in this study can be used for the analysis of bodies modeled using the FFR formulation, using FFR/ANCF elements,34 and bodies with complex geometries and joints using the concept of the ANCF reference node.17,35,36 Furthermore, the matrix sparsity achieved allows for efficient numerical solution of the resulting coupled thermo-elasticity equations.37 Because of the dependence of the heat equation on the continuum geometry, the ANCF mesh topology is expected to be an issue in future investigations. Enhancing the efficiency of the FE implementation is an important issue given recent research activities focused on developing new nonlinear formulations to address a wide range of challenging applications. While some of these investigations consider coupled ANCF thermomechanical analysis, the problem of large-displacement geometrically coupled analysis using ANCF finite elements as presented in this study has not been previously addressed.
Footnotes
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Ahmed A. Shabana
Appendix
The difference between the two cases and depends on the definition of the stress-force vector. The first case, , assumes that the power of the stress force is defined using the stress-force vector used in the partial-differential equation of equilibrium associated with an infinitesimal volume and not a surface. The vector is of the same category as the inertia-force vector and body-force vector . For example, an approach to relate the inertia force to the rate of kinetic energy, as in the case of Lagrange's equation, is to multiply the motion equation by the velocity vector to obtain . It was shown that . If the motion of the continuum is described using a set of generalized coordinates , one can write
Instead of using the virtual displacement , as is the case in deriving Lagrange's equation, one can use the velocity vector and write
Because , , and , one has
In this equation, is the kinetic energy per unit volume. This approach of defining the inertia force in terms of the kinetic energy starts with the definition of the inertia force in the motion equation. The case in which is based on making the same argument of using the stress force that appears in the motion equation to define the stress power. This general derivation does not exclude the effect of rigid elements attached to the continuum surface since the inertia of these rigid elements are described using the same generalized coordinates. Therefore, using the forces that appear in the equation to define the power of forces does not exclude surface forces.
The equations and can be used to derive the equations of motion of the continuum that include all forces including the surface-stress forces. This can be demonstrated by integrating Eq. A.2 over the volume to obtain
If the coordinates are independent, one has . Substituting the definition of the absolute acceleration , where into this equation, one obtains the equations of motion of the continuum as
where
If a force per unit area is acting on a boundary surface parametrized by the surface parameters ; one can write the velocity vector on this surface as , where , and is the equation of the boundary surface to be distinguished from the interior surface used to derive Cauchy-stress formula. In this case, the force vector due to boundary-surface force reduces to the surface integral
That is, the volume integral reduces to a surface integral in the case of a prescribed surface force. Consequently, captures the effect of both internal and surface forces, a necessary condition to ensure the correctness of the equation of motion and inclusion of all forces that influence this motion. Boundary-surface stresses due to contact and friction are distinguished from internal stresses, which are function of the material-point coordinates.
References
1.
BorgnakkeCSonntagRE. Fundamentals of thermodynamics. Hoboken, NJ: John Wiley & Sons, 2022.
2.
BalmerRT. Modern engineering thermodynamics. Oxford, UK: Academic Press, 2011.
3.
PlanckM. Treatise on thermodynamics. New York, NY: Dover Publications, 1969.
4.
Hari DassND. The principles of thermodynamics. Boca Raton, FL: CRC Press, 2014.
5.
RajputRK. Engineering thermodynamics: a computer approach. Patiala, Punjab: Jones & Bartlett Publishers, 2009.
6.
BonetJWoodRD. Nonlinear continuum mechanics for finite element analysis. Cambridge University Press, 1997.
7.
OgdenRW. Non-linear elastic deformations. New York, NY: Dover Publications, 1984.
ShabanaAA. Computational continuum mechanics. 3rd ed.Cambridge: Cambridge University Press, 2018.
10.
CookRDMalkusDSPleshaME. Concepts and applications of finite element analysis. 3rd ed.New York, NY: Wiley, 1989.
11.
CloughRW. The finite element method in plane stress analysis. In: Proceedings of the 2nd Conference of American Society of Civil Engineers on Electronic Computation, Pittsburgh, PA, 8–9 September 1960, pp. 345–378.
12.
NoorAK. Bibliography of books and monographs on finite element technology. Appl Mech Rev1991; 44: 307–317.
13.
KardestuncerH (ed) Finite element handbook. New York, NY: McGraw-Hill, 1987.
14.
LoganDL. A first course in the finite element method. 6th ed. Farmington Hills, MI: Cengage Learning, 2017.
15.
ZienkiewiczOC. The finite element method. 3rd ed.New York, NY: McGraw Hill, 1977.
16.
OmarMAShabanaAAMikkolaA, et al.Multibody system modeling of leaf springs. J Vib Control2004; 10: 1601–1638.
OrzechowskiGShabanaAA. Analysis of warping deformation modes using higher order ANCF beam element. Sound Vib2016; 363: 428–445.
19.
ShabanaAA. An overview of the ANCF approach, justifications for its use, implementation issues, and future research directions. Multibody Sys Dyn2023; 58: 433–477. 10.1007/s11044-023-09890-z
20.
ShabanaAA. Mathematical foundation of railroad vehicle systems: geometry and mechanics. Chichester, UK: John Wiley & Sons, 2021.
EckartC. The thermodynamics of irreversible processes. IV. The theory of elasticity and anelasticity. Phys Rev1948; 73: 373–380.
25.
SedovL. Foundations of the non-linear mechanics of continua. Oxford: Pergamon Press, 1966.
26.
StojanovicRVujosevicLBlagojevicD. Couple stresses in thermoelasticity. Rev Roum Sci Tech Ser Mec Appl1970; 15: 517–537.
27.
MieheC. Entropic thermoelasticity at finite strains. Aspects of the formulation and numerical implementation. Comput Methods Appl Mech Eng1995; 120: 243–269.
28.
ImamAJohnsonGC. Decomposition of deformation gradient in thermoelasticity. ASME J Appl Mech1998; 65: 362–366.
29.
LongèrePDragonATrumelH,et al.Adiabatic shear banding-induced degradation in a thermo-elastic/viscoplastic material under dynamic loading. Int J Impact Eng2005; 32: 285–320.
30.
DarijaniH. Finite deformation thermoelasticity of thick-walled cylindrical vessels based on the multiplicative decomposition of deformation gradient. J Therm Stresses2012; 35: 1143–1157.
31.
DarijaniHKargarnovinMH. Kinematics and kinetics description of thermoelastic finite deformation from multiplicative decomposition of deformation gradient viewpoint. Mech Res Commun2010; 37: 515–519.
32.
SadikSYavariA. On the origins of the idea of the multiplicative decomposition of the deformation gradient. Math Mech Solids2015; 22: 771–772.
33.
SauerRAGhaffariRGuptaA. The multiplicative deformation split for shells with application to growth, chemical swelling, thermoelasticity, viscoelasticity and elastoplasticity. Int J Solids Struct2019; 174-175: 53–68.
34.
NadaAAHusseinBAMegahedS,et al.Use of the floating frame of reference formulation in the large deformation analysis: experimental and numerical validation. IMechE J Multibody Dyn2010; 224: 45–58.
35.
ShabanaAA. ANCF Reference node for multibody system analysis. IMechE J Multibody Dyn2015; 229: 109–112.
36.
SanbornGGShabanaAA. A rational finite element method based on the absolute nodal coordinate formulation. Nonlinear Dyn2009; 58: 565–572.
37.
ShabanaAAHusseinBA. A two-loop sparse matrix numerical integration procedure for the solution of differential/algebraic equations: application to multibody systems. J Sound Vib2009; 327: 557–563.
38.
BayoumyAHNadaAAMegahedSM. Methods of modeling slope discontinuities in large size wind turbine blades using absolute nodal coordinate formulation. Proc Inst Mech Eng K J Multibody Dyn2014; 228: 314–329.
39.
BozorgmehriBObrezkovLPHarishAB, et al.A contact description for continuum beams with deformable arbitrary cross-section. Finite Elem Anal Des2023; 214: 103863.
40.
BulínRHajžmanM. Efficient computational approaches for analysis of thin and flexible multibody structures. Nonlinear Dyn2021; 103: 2475–2492.
41.
BulínRHajžmanMPolachP. Nonlinear dynamics of a cable–pulley system using the absolute nodal coordinate formulation. Mech Res Commun2017; 82: 21–28.
42.
CeponGManinLBoltezarM. Validation of a flexible multibody belt-drive model. J Mech Eng2011; 57: 539–546.
43.
CeponGStarcBZupancicB,et al.Coupled thermo-structural analysis of a bimetallic strip using the absolute nodal coordinate formulation. Multibody Sys Dyn2017; 41: 391–402.
44.
ChenYZhangDGLiL. Dynamic analysis of rotating curved beams by using absolute nodal coordinate formulation based on radial point interpolation method. J Sound Vib2019; 441: 63–83.
45.
DingZOuyangBA. Variable-length rational finite element based on the absolute nodal coordinate formulation. Machines2022; 10: 74.
46.
FanWRenHZhuW,et al.Dynamic analysis of power transmission lines with ice-shedding using an efficient absolute nodal coordinate beam formulation. J Comput Nonlinear Dyn2021; 16: 011005.
47.
FanBWangZWangQ. Nonlinear forced transient response of rotating ring on the elastic foundation by using adaptive ANCF curved beam element. Appl Math Model2022; 108: 748–769.
48.
FotlandGHaskinsCRølvågT. Trade study to select best alternative for cable and pulley simulation for cranes on offshore vessels. Syst Eng2019; 23: 177–188.
49.
FotlandGHaugenB. Numerical integration algorithms and constraint formulations for an ALE-ANCF cable element. Mech Mach Theory2022; 170: 104659. 10.1016/j.mechmachtheory.2021.104659
50.
GhorbaniHTarvirdizadehBAlipourK,et al.Near-time-optimal motion control for flexible-link systems using absolute nodal coordinates formulation. Mech Mach Theory2019; 140: 686–710.
51.
GuoXSunJYLiL, et al.Large deformations of piezoelectric laminated beams based on the absolute nodal coordinate formulation. Compos Struct2021; 275: 114426.
52.
HaraKWatanabeM. Development of an efficient calculation procedure for elastic forces in the ANCF beam element by using a constrained formulation. Multibody Sys Dyn2018; 43: 369–386.
53.
HeGGaoKYuZ, et al.Adaptive subdomain integration method for representing complex localized geometry in ANCF. Acta Mech Sin2022; 38: 521442.
54.
HeidariaHRKorayemMHHaghpanahiM. Maximum allowable load of very flexible manipulators by using absolute nodal coordinate. Aerosp Sci Technol2015; 45: 67–77.
55.
HtunTZSuzukiHGarcia-VallejoD. Dynamic modeling of a radially multilayered tether cable for a Remotely-Operated Underwater Vehicle (ROV) based on the absolute nodal coordinate formulation (ANCF). Mech Mach Theory2020; 153: 103961.
56.
HtunTZSuzukiHGarcía-VallejoD. On the theory and application of absolute coordinates-based multibody modelling of the rigid–flexible coupled dynamics of a deep-sea ROV-TMS (tether management system) integrated model. Ocean Eng2022; 258: 111748.
57.
HungLQKangZShaojieL. Numerical investigation of dynamics of the flexible riser by applying absolute nodal coordinate formulation. Mar Technol Soc J2021; 55: 179–195.
58.
KimEKimHChoM. Model order reduction of multibody system dynamics based on stiffness evaluation in the absolute nodal coordinate formulation. Nonlinear Dyn2017; 87: 1901–1915.
59.
KimHLeeHLeeK, et al.Efficient flexible multibody dynamic analysis via improved C0 absolute nodal coordinate formulation-based element. Mech Adv Mater Struct2021; 29: 1–13. 10.1080/15376494.2021.1919804
60.
LanPLiKYuZ. Computer implementation of piecewise cable element based on the absolute nodal coordinate formulation and its application in wire modeling. Acta Mech2019; 230: 1145–1158.
61.
LanPTianQYuZ. A new absolute nodal coordinate formulation beam element with multilayer circular cross section. Acta Mech Sin2020; 36: 82–96.
62.
LeiBMaZLiuJ,et al.Dynamic modelling and analysis for a flexible brush sampling mechanism. Multibody Sys Dyn2022; 56: 335–365.
63.
LiBDuanCPengQ, et al.Parametric study of planar flexible deployable structures consisting of scissor-like elements using a novel multibody dynamic analysis methodology. Arch Appl Mech2021; 91: 4517–4537. 10.1007/s00419-021-01997-z
64.
LiJLiuCHuH,et al.Analysis of elasto-plastic thin-shell structures using layered plastic modeling and absolute nodal coordinate formulation. Nonlinear Dyn2021; 105: 2899–2920.
65.
LiLWangYGuoY,et al.Large deformations of hyperelastic curved beams based on the absolute nodal coordinate formulation. Nonlinear Dyn2022; 111: 4191–4204. 10.1007/s11071-022-08076-0
66.
vLiSWangYMaX,et al.Modeling and simulation of a moving yarn segment: based on the absolute nodal coordinate formulation. Math Probl Eng2019; 2019: 6567802.
67.
LiHZhongH. Weak form quadrature elements based on absolute nodal coordinate formulation for planar beamlike structures. Acta Mechanics2021; 232: 4289–4307.
68.
MaLWeiCMaC,et al.Modeling and verification of a RANCF fluid element based on cubic rational bezier volume. J Comput Nonlinear Dyn2020; 15: 041005-1–041005-15.
69.
MaCWeiCSunJ,et al.Modeling method and application of rational finite element based on absolute nodal coordinate formulation. Acta Mech Solida Sin2018; 31: 207–228. 10.1007/s10338-018-0020-z
70.
MohamedANA. Three-dimensional fully parameterized triangular plate element based on the absolute nodal coordinate formulation. J Comput Nonlinear Dyn2013; 8: 041016.
71.
NachbagauerK. State of the art of ANCF elements regarding geometric description, interpolation strategies, definition of elastic forces, validation and locking phenomenon in comparison with proposed beam finite elements. Arch Comput Meth Eng2014; 21: 293–319.
72.
NachbagauerKGerstmayrJ. Structural and continuum mechanics approaches for a 3D shear deformable ANCF beam finite element: application to buckling and nonlinear dynamic examples. J Comput Nonlinear Dyn2014; 9: 011013.
ObrezkovLBozorgmehriBFinniT,et al.Approximation of pre-twisted Achilles sub-tendons with continuum-based beam elements. Appl Math Model2022; 112: 669–689.
75.
ObrezkovLEliassonPHarishAB,et al.Usability of finite elements based on the absolute nodal coordinate formulation for deformation analysis of the Achilles tendon. Int J Nonlinear Mech2021; 129: 103662. 10.1016/j.ijnonlinmec.2020.103662
76.
ObrezkovLPMatikainenMKHarishAB. A finite element for soft tissue deformation based on the absolute nodal coordinate formulation. Acta Mech2020; 231: 1519–1538.
77.
ObrezkovLMatikainenMKKouhiaR. Micropolar beam-like structures under large deformation. Int J Solids Struct2022; 254–255: 111899.
78.
OlshevskiyADmitrochenkoODaiMD,et al.The simplest 3-, 6- and 8-noded fully-parameterized ANCF plate elements using only transverse slopes. Multibody Syst Dyn2015; 34: 23–51.
79.
OlshevskiyADmitrochenkoOKimCW. Three-dimensional solid brick element using slopes in the absolute nodal coordinate formulation. J Comput Nonlinear Dyn2014; 9: 021001-1–021001-10.
OrzechowskiGFrączekJ. Integration of the equations of motion of multibody systems using absolute nodal coordinate formulation. Acta Mech Autom2012; 6: 75–83.
82.
OrzechowskiGFraczekJ. Nearly incompressible nonlinear material models in the large deformation analysis of beams using ANCF. Nonlinear Dyn2023; 82: 451–464.
83.
OtsukaKMakiharaK. Absolute nodal coordinate beam element for modeling flexible and deployable aerospace structures. AIAA J2019; 57: 1343–1346.
OtsukaKWangYFujitaK, et al.Consistent strain-based multifidelity modeling for geometrically nonlinear beam structures. J Comput Nonlinear Dyn2022; 17: 111003.
86.
PanKCaoD. Absolute nodal coordinate finite element approach to the two-dimensional liquid sloshing problems. Proc Inst Mech Eng K J Multi-Body Dyn2020; 234: 1–25.
87.
PengCYangCXueJ, et al.An adaptive variable-length cable element method for form-finding analysis of railway catenaries in an absolute nodal coordinate formulation. Eur J Mech A Solids2022; 93: 104545. 10.1016/j.euromechsol.2022.104545
88.
RenHFanW. An adaptive triangular element of absolute nodal coordinate formulation for thin plates and membranes. Thin-Walled Struct2023; 182: 110257.
89.
SanbornGGChoiJChoiJH. Curved-induced distortion of polynomial space curves, flat-mapped extension modeling, and their impact on ANCF thin-plate finite elements. Multibody Sys Dyn2011; 36: 191–211.
90.
SeoJHKimSWJungIH, et al.Dynamic analysis of a pantograph-catenary system using absolute nodal coordinates. Veh Syst Dyn2006; 44: 615–630.
91.
SereshkMVSalimiM. Comparison of finite element method based on nodal displacement and absolute nodal coordinate formulation (ANCF) in thin shell analysis. Int J Numer Method Biomed Eng2011; 27: 1185–1198.
92.
ShenZLiuCLiH. Viscoelastic analysis of bistable composite shells via absolute nodal coordinate formulation. Compos Struct2020; 248: 112537. 10.1016/j.compstruct.2020.112537
93.
ShenZXingXLiB. A new thin beam element with cross-section distortion of the absolute nodal coordinate formulation. IMechE J Mech Eng Sci2021; Part C: 7456–7467. 10.1177/09544062211020046
94.
ShengFZhongZWangK. Theory and model implementation for analyzing line structures subject to dynamic motions of large deformation and elongation using the absolute nodal coordinate formulation (ANCF) approach. Nonlinear Dyn2020: 333–359. 10.1007/s11071-020-05783-4
95.
SkrinjarLSlavicJBoltežarM. Absolute nodal coordinate formulation in a pre-stressed large-displacements dynamical system. J Mech Eng2017; 63: 417–425.
96.
SongZChenJChenC. Application of discrete shape function in absolute nodal coordinate formulation. Math Biosci Eng2021; 18: 4603–4627.
97.
TakahashiYShimizuNSuzukiK. Study on the frame structure modeling of the beam element formulated by absolute coordinate approach. J Mech Sci Technol2005; 19: 283–291.
98.
TangYTianQHuH. Efficient modeling and order reduction of new 3D beam elements with warping via absolute nodal coordinate formulation. Nonlinear Dyn2022; 109: 2319–2354. 10.1007/s11071-022-07547-8
99.
TurMGarcíaEBaezaL,et al.A 3D absolute nodal coordinate finite element model to compute the initial configuration of a railway catenary. Eng Struct2014; 71: 234–243.
100.
VoharBKeglMRenZ. Implementation of an ANCF beam finite element for dynamic response optimization of elastic manipulators. Eng Optim2008; 40: 1137–1150.
101.
WangTF. Two new triangular thin plate/shell elements based on the absolute nodal coordinate formulation. Nonlinear Dyn2020; 99: 2707–2725.
102.
WangYLiSMaX, et al.An analytical approach of filament bundle swinging dynamics, part I: modeling filament bundle by ANCF. Text Res J2019; 89: 4607–4619.
103.
WangJWangT. Buckling analysis of beam structure with absolute nodal coordinate formulation. IMechE J Mech Eng Sci2020; 235: 1585–1592. 10.1177/0954406220947117
104.
WangTWuZWangJ, et al.Simulation of membrane deployment accounting for the nonlinear crease effect based on absolute nodal coordinate formulation. Nonlinear Dyn2022; 111: 2521–2535. 10.1007/s11071-022-07952-z
105.
XuQPLiuJYQuLZ. Dynamic modeling for silicone beams using higher-order ANCF beam elements and experiment investigation. Multibody Sys Dyn2019; 46: 307–328.
106.
YooWSDmitrochenkoOParkSJ,et al.A new thin spatial beam element using the absolute nodal coordinates: application to a rotating strip. Mech Based Des Struct Mach2005; 33: 399–342.
107.
YooWSLeeJHParkSJ, et al.Large oscillations of a thin cantilever beam: physical experiments and simulation using the absolute nodal coordinate formulation. Nonlinear Dyn2003; 34: 3–29.
108.
YuZCuiY. New ANCF solid-beam element: relationship with Bézier volume and application on leaf spring modeling. Acta Mech Sin2021; 37: 1318–1330.
109.
YuLZhaoZTangJ,et al.Integration of absolute nodal elements into multibody system. Nonlinear Dyn2010; 62: 931–943.
110.
YuHDZhaoZJYangD,et al.A new composite plate/plate element for stiffened plate structures via absolute nodal coordinate formulation. Compos Struct2020; 247: 112431.
111.
YuanTLiuZZhouY,et al.Dynamic modeling for foldable origami space membrane structure with contact-impact during deployment. Multibody Sys Dyn2020; 50: 1–24.
112.
YuanTTangLLiuZ,et al.Nonlinear dynamic formulation for flexible origami-based deployable structures considering self-contact and friction. Nonlinear Dyn2021; 106: 1789–1822. 10.1007/s11071-021-06860-y
113.
ZemljaričBAzbeV. Analytically derived matrix End-form elastic-forces equations for a low-order cable element using the absolute nodal coordinate formulation. Sound Vib2019; 446: 263–272.
114.
ZhangPDuanMGaoQ, et al.Efficiency improvement on the ANCF cable element by using the dot product form of curvature. Appl Math Model2021; 102: 435–452. 10.1016/j.apm.2021.09.027
115.
ZhangCKangZMaG, et al.Mechanical modeling of deepwater flexible structures with large deformation based on absolute nodal coordinate formulation. J Mar Sci Technol2019; 24: 1241–1255.
116.
ZhangDLuoJ. A comparative study of geometrical curvature expressions for the large displacement analysis of spatial absolute nodal coordinate formulation Euler–Bernoulli beam motion. Proc Inst Mech Eng K J Multibody Dyn2019; 233: 631–641.
117.
ZhangZMaoHHouJ, et al.Development and implementation of model smoothing method in the framework of absolute nodal coordinate formulation. Proc Inst Mech Eng K J Multibody Dyn2021; 235: 312–325.
118.
ZhangZRenWZhouW. Research status and prospect of plate elements in absolute nodal coordinate formulation. Proc Inst Mech Eng K J Multibody Dyn2022; 236: 357–367. 10.1177/14644193221098866
119.
ZhangPYanZLuoK,et al.Optimal design of electrode topology of dielectric elastomer actuators based on the parameterized level set method. Soft Robot2022; 10: 106–118. 10.1089/soro.2021.0169
120.
ZhangYWeiCZhaoY, et al.Adaptive ANCF method and its application in planar flexible cables. Acta Mech Sin2018; 34: 199–213.
121.
ZhangWZhuWZhangS. Deployment dynamics for a flexible solar array composed of composite-laminated plates. ASCE J Aerosp Eng2020; 33: 04020071-1–04020071-21.
122.
ZhaoJTianQHuH. Modal analysis of a rotating thin plate via absolute nodal coordinate formulation. J Comput Nonlinear Dyn2011; 6: 041013.
123.
TangLLiuJ. Modeling and analysis of sliding joints with clearances in flexible multibody systems. Nonlinear Dyn2018; 94: 2423–2440.
124.
SunDLiuCHuH. Dynamic computation of 2D segment-to-segment frictionless contact for a flexible multibody system subject to large deformation. Mech Mach Theory2019; 140: 350–376.
125.
SunDLiuCHuH. Dynamic computation of 2D segment-to-segment frictional contact for a flexible multibody system subject to large deformations. Mech Mach Theory2021; 158: 104197.
126.
CuiYYuZLanP. A novel method of thermo-mechanical coupled analysis based on the unified description. Mech Mach Theory2019; 134: 376–392.
127.
ShabanaAA. ANCF Tire assembly model for multibody system applications.J Comput Nonlinear Dyn2015; 10: 024504.
128.
ShenZHuG. Thermally induced vibrations of solar panel and their coupling with satellite. Int J Appl Mech2013; 05: 1350031.
129.
LiuCTianQYanD,et al.Dynamic analysis of membrane systems undergoing overall motions, large deformations and wrinkles via thin shell elements of ANCF. Comput Methods Appl Mech Eng2013; 258: 81–95.
130.
LiuCTianQHuH. New spatial curved beam and cylindrical shell elements of gradient-deficient absolute nodal coordinate formulation. Nonlinear Dyn2012; 70: 1903–1918.
131.
MohamedANAShabanaAA. A nonlinear visco-elastic constitutive model for large rotation finite element formulations. Multibody Sys Dyn2011; 26: 57–79.
132.
RenH. Fast and robust full-quadrature triangular elements for thin plates/shells with large deformations and large rotations. J Comput Nonlinear Dyn2015; 10: 051018.
133.
RenH. A simple absolute nodal coordinate formulation for thin beams with large deformations and large rotations. J Comput Nonlinear Dyn2015; 10: 061005.
134.
LiYWangCHuangW. Rigid-flexible-thermal analysis of planar composite solar array with clearance joint considering torsional spring, latch mechanism and attitude controller. Nonlinear Dyn2019; 96: 2031–2053.
135.
ShenZHuG. Thermally induced dynamics of a spinning spacecraft with an axial flexible boom.J Spacecr Rockets2015; 52: 1503–1508.
136.
LiHZhongH. Spatial weak form quadrature beam elements based on absolute nodal coordinate formulation. Mech Mach Theory2023; 181: 105192.
137.
ZhaoCHBaoKWTaoYL. Transversally higher-order interpolating polynomials for the two-dimensional shear deformable ANCF beam elements based on common coefficients. Multibody Sys Dyn2021; 51: 475–495.
138.
TaylorMSerbanRNegrutD. Implementation implications on the performance of ANCF simulations. Int J Nonlinear Mech2022; 20: 104328. 10.1016/j.ijnonlinmec.2022.104328
139.
PappalardoCMWangTShabanaAA. On the formulation of the planar ANCF triangular finite elements. Nonlinear Dyn2017; 89: 1019–1045.
140.
TaylorMSerbanRNegrutD. An efficiency comparison of different ANCF implementations. Int J Nonlinear Mech2022; 25: 104308.
141.
ObrezkovLPFinniTMatikainenMK. Modeling of the Achilles subtendons and their interactions in a framework of the absolute nodal coordinate formulation. Materials2022; 15: 8906.
142.
DongSOtsukaKMakiharaK. Hamiltonian formulation with reduced variables for flexible multibody systems under linear constraints: theory and experiment. J Sound Vib2023; 547: 117535.
143.
WuMTanSXuH,et al.Absolute nodal coordinate formulation-based shape sensing approach for large deformation: plane beam. AIAA J2023; 61: 1380–1395. 10.2514/1.J062266
144.
ZhouKYiHRDaiHL, et al.Nonlinear analysis of L-shaped pipe conveying fluid with the aid of absolute nodal coordinate formulation. Nonlinear Dyn2021; 107: 391–412.
145.
YuanJRDingH. Dynamic model of curved pipe conveying fluid based on the absolute nodal coordinate formulation. Int J Mech Sci2022; 232: 107625.
146.
XuQLiuJ. Dynamic research on nonlinear locomotion of inchworm-inspired soft crawling robot. Soft Robot2023; 10: 660–672. 10.1089/soro.2022.0002
147.
LuoSFanYCuiN. Application of absolute nodal coordinate formulation in calculation of space elevator system. Appl Sci2021; 11: 11576.
148.
MalikSSolaijaT. Static and dynamic analysis of absolute nodal coordinate formulation planar elements. In: 2020 17th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 14–18 January 2020, pp. 167–173. 10.1109/IBCAST47879.2020.9044494
149.
KangJHYooWSKimHR, et al.Definition of non-dimensional strain energy for large deformable flexible beam in absolute nodal coordinate formulation. Trans Korean Soc Mech Eng A2018; 42: 643–648.
150.
XiaoHHedegaardBD. Absolute nodal coordinate formulation for dynamic analysis of reinforced concrete structures. Structures2021; 33: 201–213.
151.
YangMSLeeJWKangJH, et al.Definition of non-dimensional strain energy for thin plate in the absolute nodal coordinate formulation. Trans Korean Soc Mech Eng A2021; 45: 1085–1090.
152.
YuHDZhaoCZZhengB,et al.A new higher-order locking-free beam element based on the absolute nodal coordinate formulation. Proc Inst Mech Eng C J Mech Eng Sci2018; 232: 3410–3423.
153.
LiLChenYZZhangDG,et al.Large deformation and vibration analysis of microbeams by absolute nodal coordinate formulation. Int J Struct Stab Dyn2019; 19: 1950049.
154.
TaoJEldeebAELiS. High-fidelity modeling of dynamic origami folding using absolute nodal coordinate formulation (ANCF). Mech Res Commun2023; 129: 104089.
155.
YuZCuiYZhangQ, et al.Thermo-mechanical coupled analysis of V-belt drive system via absolute nodal coordinate formulation. Mech Mach Theory2022; 174: 104906.
156.
PatelMShabanaAA. Locking alleviation in the large displacement analysis of beam elements: the strain split method. Acta Mech2018; 229: 2923–2946.
157.
ShabanaAADesaiCJGrossiE,et al.Generalization of the strain-split method and evaluation of the nonlinear ANCF finite elements. Acta Mech2020; 231: 1365–1376.
158.
ZhangJDuXChenY, et al.Free vibration analysis of a rotating skew plate by using the absolute nodal coordinate formulation. Thin-Walled Struct2023; 188: 110840.
159.
ShabanaAAEldeebAEBaiZ. Near-elimination of small oscillations of articulated flexible-robot systems. Sound Vib2021; 500: 116015.
160.
ShabanaAAZhangD. ANCF curvature continuity: application to soft and fluid materials. Nonlinear Dyn2022; 100: 1497–1517.
161.
YakoubRYShabanaAA. Use of Cholesky coordinates and the absolute nodal coordinate formulation in the computer simulation of flexible multibody systems. Nonlinear Dyn1999; 20: 267–282.