
Abstract
The reliable performance of friction dampers in seismic retrofitting depends on precise calibration of the normal force. Yet, in practice, this parameter is often uncertain due to installation tolerances, long-term degradation, and variable site conditions. To overcome this limitation, this paper introduces a semi-active slotted-bolted connection (SASBC) that integrates liquid-crystal interfaces with an energy-based control algorithm to adapt the damper’s friction coefficient in real time. A novel energy state-space formulation is developed, providing smoother trajectories than conventional force-based models and enabling gradient-based optimization of voltage commands. Numerical simulations of a five-story reinforced-concrete residential building demonstrate the advantages of the proposed method. Passive SBC retrofits prevent collapse but increase shear demand, while the SASBC achieves comparable drift reduction with controlled shear levels, maintaining stable hysteresis even under uncertain normal force conditions. These results highlight the SASBC as a practical, robust, and adaptive retrofit solution that combines the reliability of passive devices with the responsiveness of active control to enhance seismic resilience.
Keywords
1. Introduction
Energy-dissipation devices are used worldwide to support civil structures and mitigate and control their vibrational response. Some of the most used devices installed in buildings are metallic yield dampers, fluid viscous dampers, viscous-elastic dampers, and friction dampers. 1 This paper concerns friction dampers, whose energy dissipation and forces are modeled using the Coulomb law for dry sliding surfaces. The idealized piece-wise Coulomb friction model is sufficiently accurate for civil engineering applications, as shown by the review paper of Gagnon et al. 2 on friction mechanism. In terms of the applied damper force, the hysteretic friction force behavior is characterized by thick loops, indicating high dissipation capabilities, but it should also be noted that the damper adds significant shear forces that relate to the direction of the interstory velocity. 3
The use of friction mechanisms and friction dampers has been proven to regulate the dynamic response of wind trusses, 4 cantilever structures, 5 and beam support. 6 In addition, the recent review paper of Jaisee et al. 7 provides examples of friction damper application in buildings and implies that the most common friction damper types installed are the (i) Pall friction damper, (ii) slotted bolted connection (SBC), (iii) Sumitomo friction damper, (iv) energy dissipating restraint, (v) rotational friction damper, and (vi) cylindrical friction damper. A more detailed description of their applications is provided by Pall and Pall8,9 and FitzGerald et al. 10 Furthermore, the broader field of smart structures and materials is experiencing rapid advancements in active and semi-active vibration control strategies. 11 Parallel developments in semi-active structural systems have successfully employed adaptive pneumatic vibration isolators governed by nonlinear state error feedback, 12 as well as magnetorheological dampers utilizing active disturbance rejection control to mitigate seismic responses. 13 While there have been some attempts to introduce the friction mechanism to a semi-active control system (e.g.,14–17), no assembly has yet to be tested and applied to civil structures. The application of friction in vibration control also extends to mass-amplifying elements, such as inerters. Frictional forces inherently exist within the high-speed mechanisms of devices such as ball-screw inerters. A recent study by Xing et al. 18 demonstrates that accounting for this apparent friction is crucial, as a larger apparent friction coefficient can significantly reduce the resonance peaks of displacement transmissibility and relative displacement, thereby enhancing low-frequency vibration isolation performance.
Two primary weaknesses in employing friction dampers are the methods for optimally allocating them and the challenge of accurately calibrating the normal force. 3 However, existing methods for optimally allocating friction dampers focus on other parameters rather than the magnitude of the friction force. For example, Levy et al. 19 introduced a two-phase iterative method that addresses the slip elongations of the friction damper. The design procedure is based on linear-elastic modal analysis to approximate the period of the damped system. Lee et al. 20 employed the normalization method for optimizing the slip-load allocation to shear-type models, which is also based on linear-elastic analysis. Weber et al. 21 proposed an equivalent viscous damper model to suggest where predefined assemblies of friction dampers should be allocated. Tirca et al. 22 used an equivalent stiffness model to minimize the gap between input energy and the energy dissipated by Coulomb friction. Other methodologies have focused on improving the structural dynamic response rather than damper performance.
Miguel et al. 23 minimized the stochastic structural response through the mean and variance of the maximum displacement. The stochastic response relates to the linear-elastic transfer function matrix. They employed a genetic algorithm to obtain Pareto-optimal solutions via different allocations. Kim and An 24 also used a genetic algorithm to mitigate the maximum roof displacement and interstory drift ratio, but proposed various approaches for assessing the problem’s initial conditions. Miguel et al. 25 attempted to optimize the location and force of friction dampers simultaneously using the backtracking search optimization algorithm. Miguel et al. 26 and Perez et al. 27 followed suit and applied the search group algorithm (SGA) to mitigate the frequency domain response of structures by optimally allocating friction dampers. Jarrahi et al. 28 referred to rotational friction dampers and addressed the damper’s vertical rigid beam (part of its assembly) and the frictional moment by optimizing the seismic input energy using a Particle swarm optimization (PSO) algorithm. While these passive optimization techniques are beneficial, they cannot actively adapt to changing operating conditions. To address this, other engineering domains have shifted toward active suppression frameworks. For instance, in automotive hybrid braking systems, an improved particle swarm optimization combined with fuzzy control (IPSO-FC) strategy has been developed to actively allocate braking torques (Zheng et al. 29 ). By dynamically maintaining the system pressure below the Hopf bifurcation threshold, this active approach successfully avoids friction-induced limit cycle vibrations while optimizing overall energy recovery efficiency.
In recent years, researchers have begun exploring how to bypass the limitations of passive friction calibration by modulating the friction coefficient itself through electrical means. Kimura et al. 30 demonstrated that by applying electric fields across lubricated contacts with liquid crystals, the friction coefficient could be significantly and reversibly reduced under boundary lubrication regimes. Extending this concept, Lu et al. 31 showed that the direction and magnitude of applied electric currents can alter surface potential and lubricant behavior, with positive current applications yielding a pronounced increase in friction due to reduced surface activity and tribo-film formation. These findings offer a promising framework for integrating active friction control into structural damping.
This paper follows suit and employs the relationship between the voltage and the friction coefficient. The Semi-active Slotted Bolted Connection (SASBC) is employed, and the active control algorithm is developed. This configuration can adapt to earthquake loads while balancing shear forces and energy dissipation.
2. Energy equilibrium state-space
The installation of the Slotted Bolted Connection (SBC) system between structural columns is illustrated in Figure 1. In this configuration, a traditional dry sliding interface is transformed into a semi-active energy dissipation device by enabling control over the normal force applied between the sliding surfaces. Slotted bolted connection installation between columns.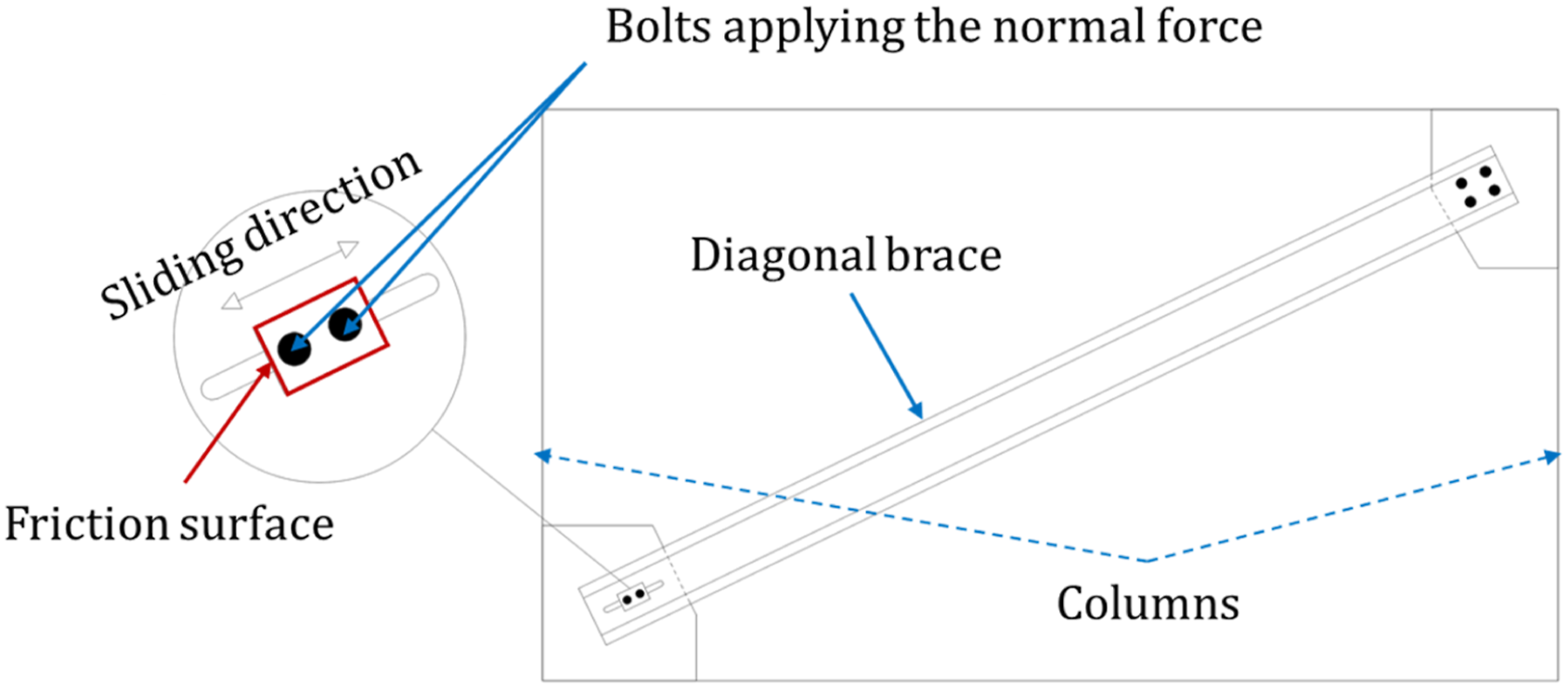
The SBC assembly is installed between two adjacent columns and incorporates a concentric bracing member connected through a slotted-bolted gusset plate. This connection permits relative motion between the plates during lateral structural deformation. As the plates slide against each other due to interstory drift, the brace mobilizes frictional forces between the frame columns, thereby dissipating vibrational energy.
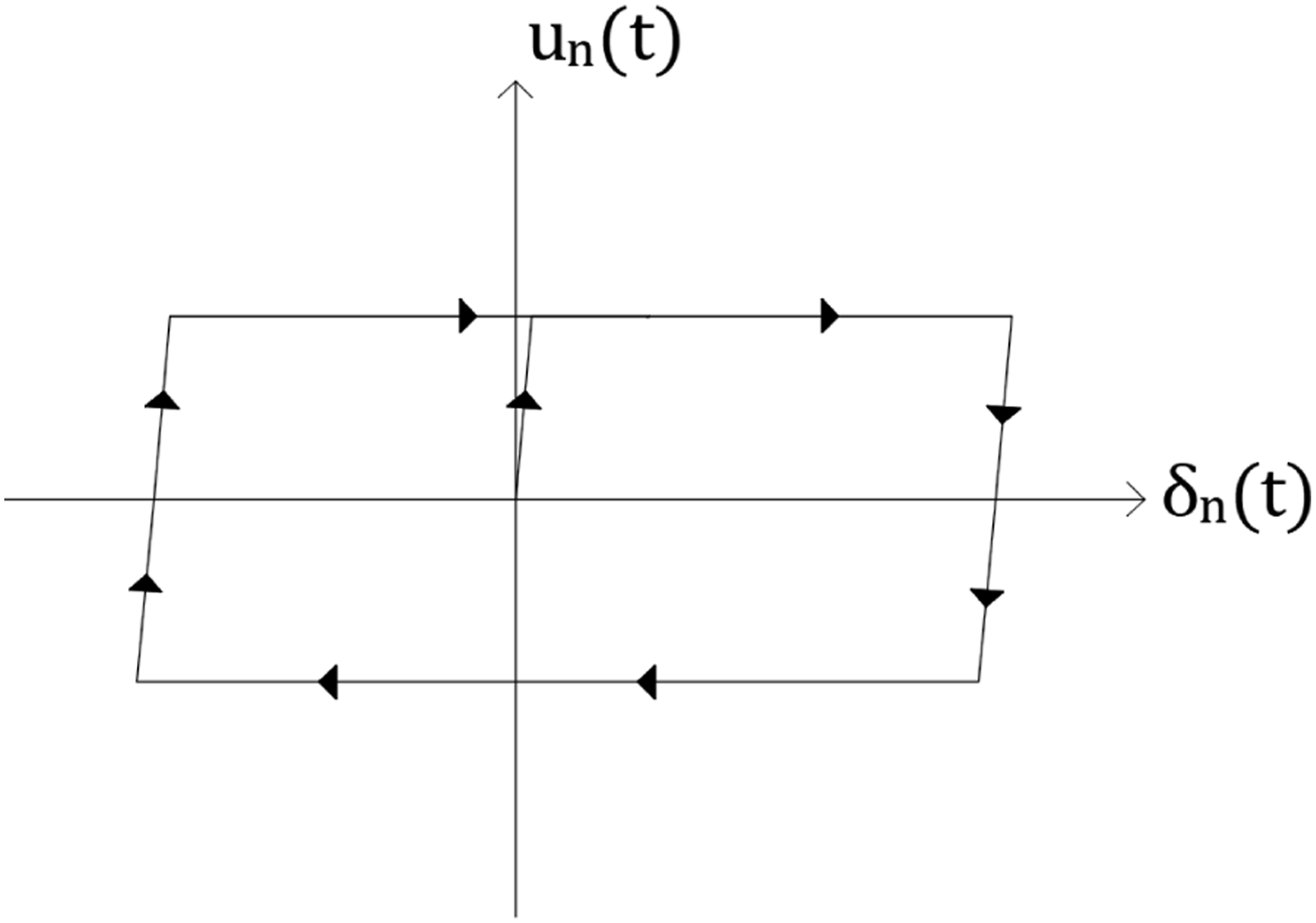
The friction force generated by the nth damper is governed by Coulomb’s law and is expressed as: Frame system elevation scheme with SASBC dampers. Friction force hysteretic loop.

In this paper, the SBC damper is enhanced with active control capability and is henceforth referred to as the Semi-Active Slotted Bolted Connection (SASBC). In this configuration, the sliding surfaces are coated with a layer of liquid crystals, enabling active modulation of the effective friction coefficient
Following the experimental findings of Kimura et al.
30
, a piecewise linear relationship is adopted between the applied voltage Relationship between the input voltage ξ and the coefficient of kinetic friction μ.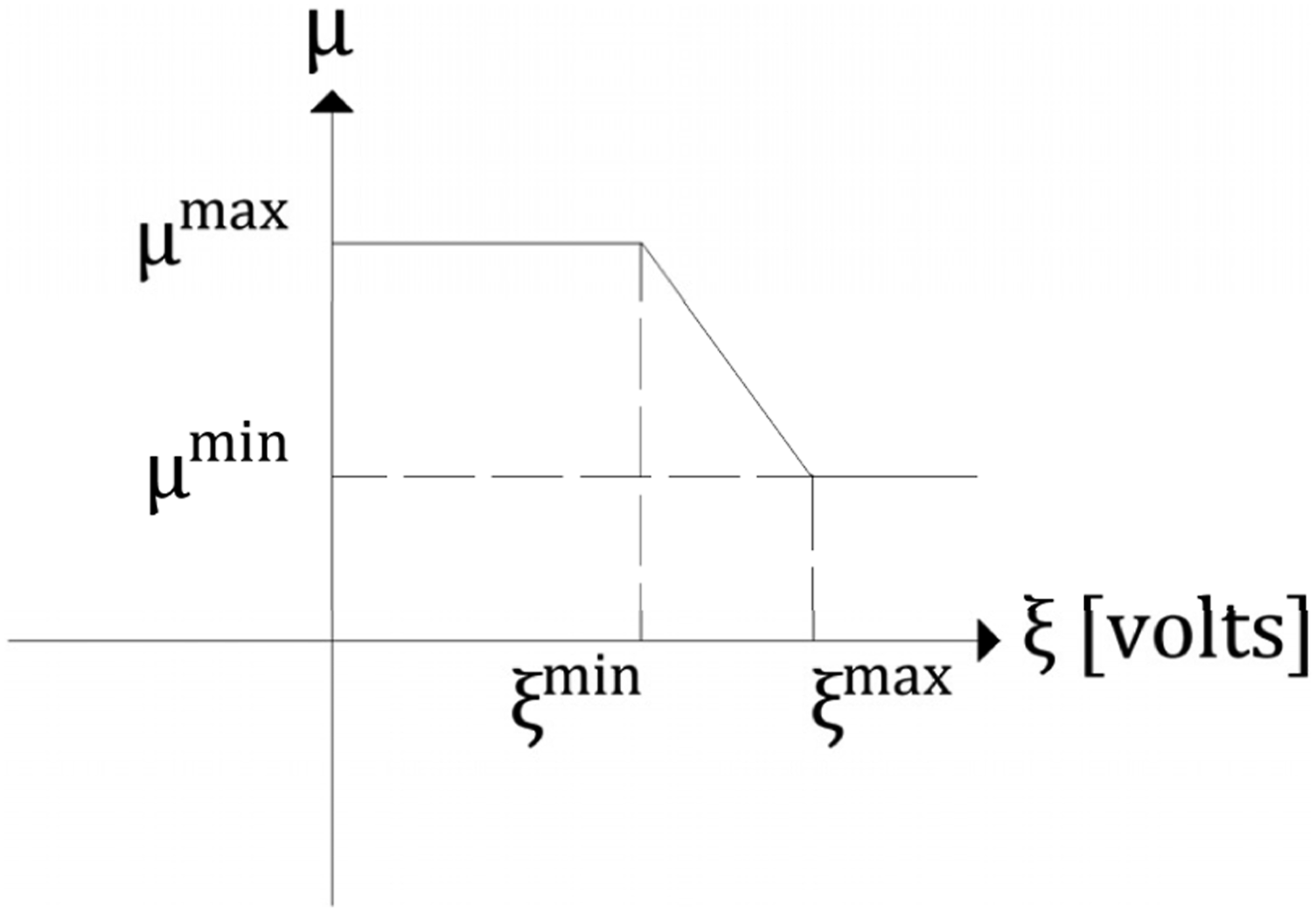


The dynamic behavior of the controlled structural frame is governed by the balance of horizontal forces acting at each story level. The equation of motion, expressed in terms of interstory drift degrees of freedom (DOFs), is formulated as:



Its inverse transformation

The damping matrix

The semi-active friction force vector

In the case of earthquake excitation, the external force vector



Eq. (11) establishes a direct linear relationship between the absolute floor accelerations and the internal shear forces. This relationship is later utilized in the development of the closed-loop control law.
To facilitate control design, the total restoring force



To optimize the voltage input vector
The generalized state-space formulation, for an inelastic system, stems from the following set of equations derived from Eq. (4) and coupled with obvious equilibrium terms:




This representation is presented in the work of Shmerling and Gerdts, 32 which provides various generalized state-space formulations for nonlinear control systems.
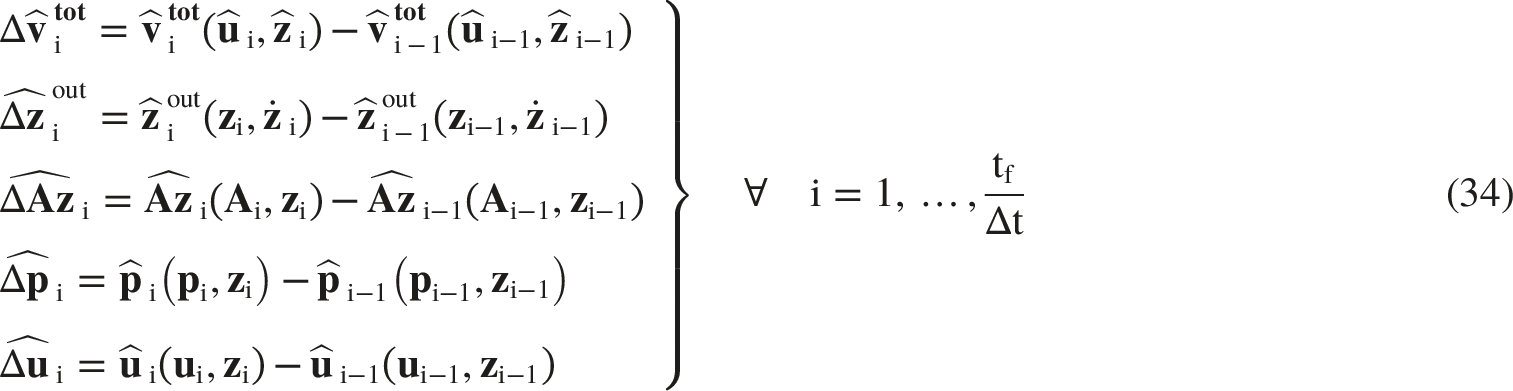
In this paper, nonlinear structural systems equipped with friction dampers are modeled in a generalized state-space form that accommodates both active and semi-active control signals:

In this formulation, the elastic restoring forces are embedded within the state matrix State-space closed-loop process.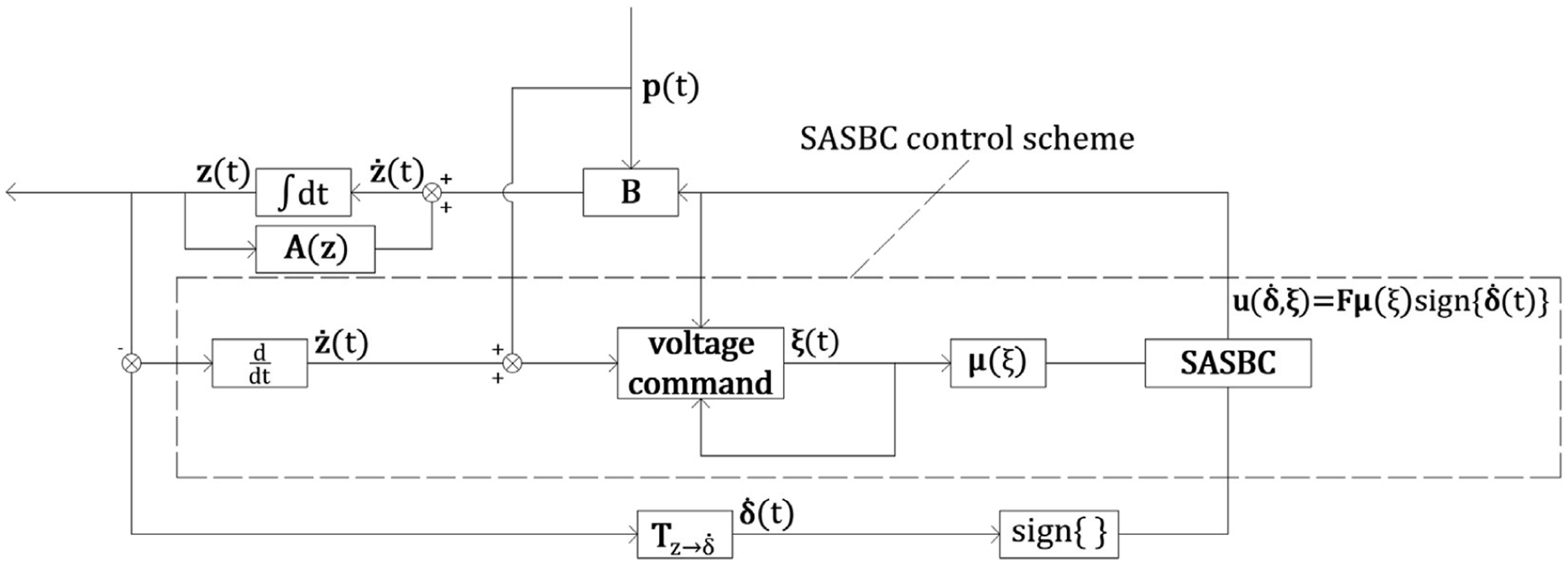

The corresponding 4N×4N state matrix


The control input vector


This energy-based formulation sets the foundation for designing a closed-loop control algorithm that seeks to minimize structural response by adjusting
Eq. (17), which defines the system dynamics in terms of lateral force equilibrium, can be reformulated in terms of energy equilibrium by integrating both sides of the equation along the system’s motion trajectory. Given that
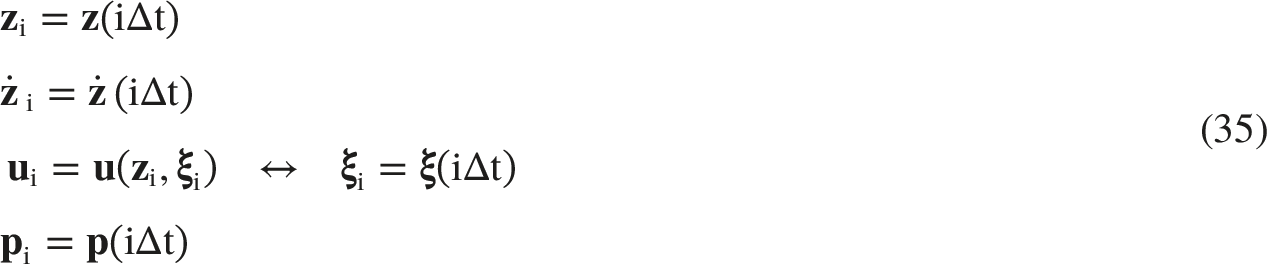
The energy state-space is expressed using the notations:




The input energy from the external load is given by:


This energy-domain formulation offers a key advantage: it provides smoother state trajectories compared to the original formulation, particularly useful in systems affected by the discontinuous behavior of Coulomb friction. As illustrated in Figure 6, which compares Comparison between the state space and energy state space: (a) Components of 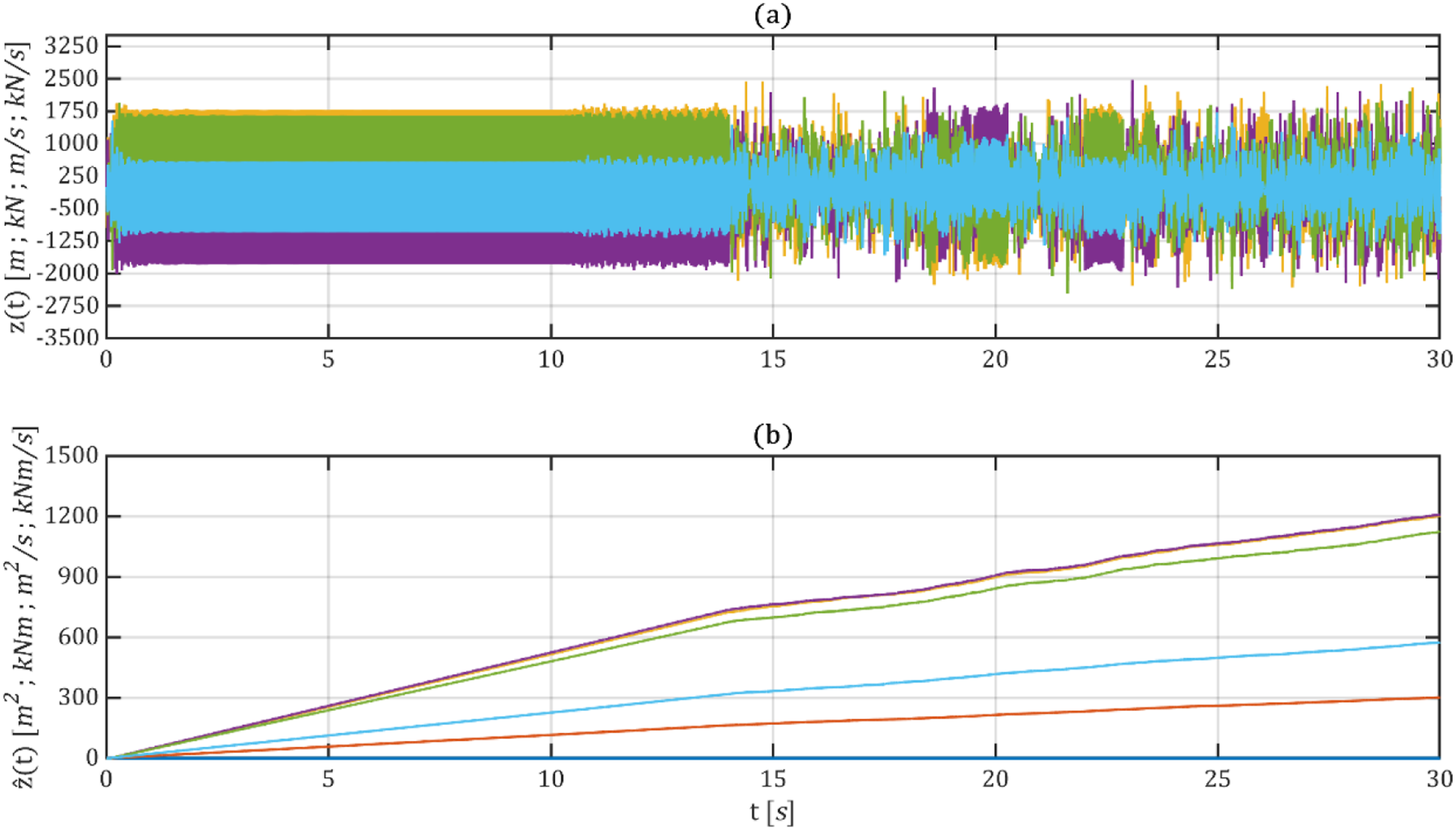
3. Energy-based system control
The energy dissipation capacity of the friction mechanism arises from its thick hysteretic loops, as illustrated earlier in Figure 3. However, while providing significant damping, friction dampers also impose large horizontal forces on the structural frame. To address this trade-off, this paper develops a semi-active control strategy that optimally modulates the damper’s friction behavior to balance energy dissipation and shear force transmission. As shown in Eq. (12), the total shear force is defined by the equilibrium of internal resisting forces and damper action. In this section, that expression is reformulated in relation to the system’s state vector:


In the energy formulation, the energy of the total shear force is given by:


The optimization goal is to minimize the discrete-time change in total shear force energy, denoted

The subcomponents are defined as:
The gradient of the objective function with respect to the change in voltage,

Given Eq. (31), the partial derivative of total energy change becomes:




Given the form of

Collected into the diagonal matrix:

Thus, the explicit gradient used in the control algorithm is:

This gradient expression is employed at each discrete time step i to determine the optimal voltage update
4. Semi-active friction calibration
The closed-loop process for calibrating the electrical voltage and, consequently, modulating the friction coefficient is a central feature of the proposed Semi-Active Slotted Bolted Connection (SASBC) system. Figure 7 illustrates the discrete-time control architecture, which continuously monitors the structural response and feeds on the real-time state vector Closed-loop control scheme.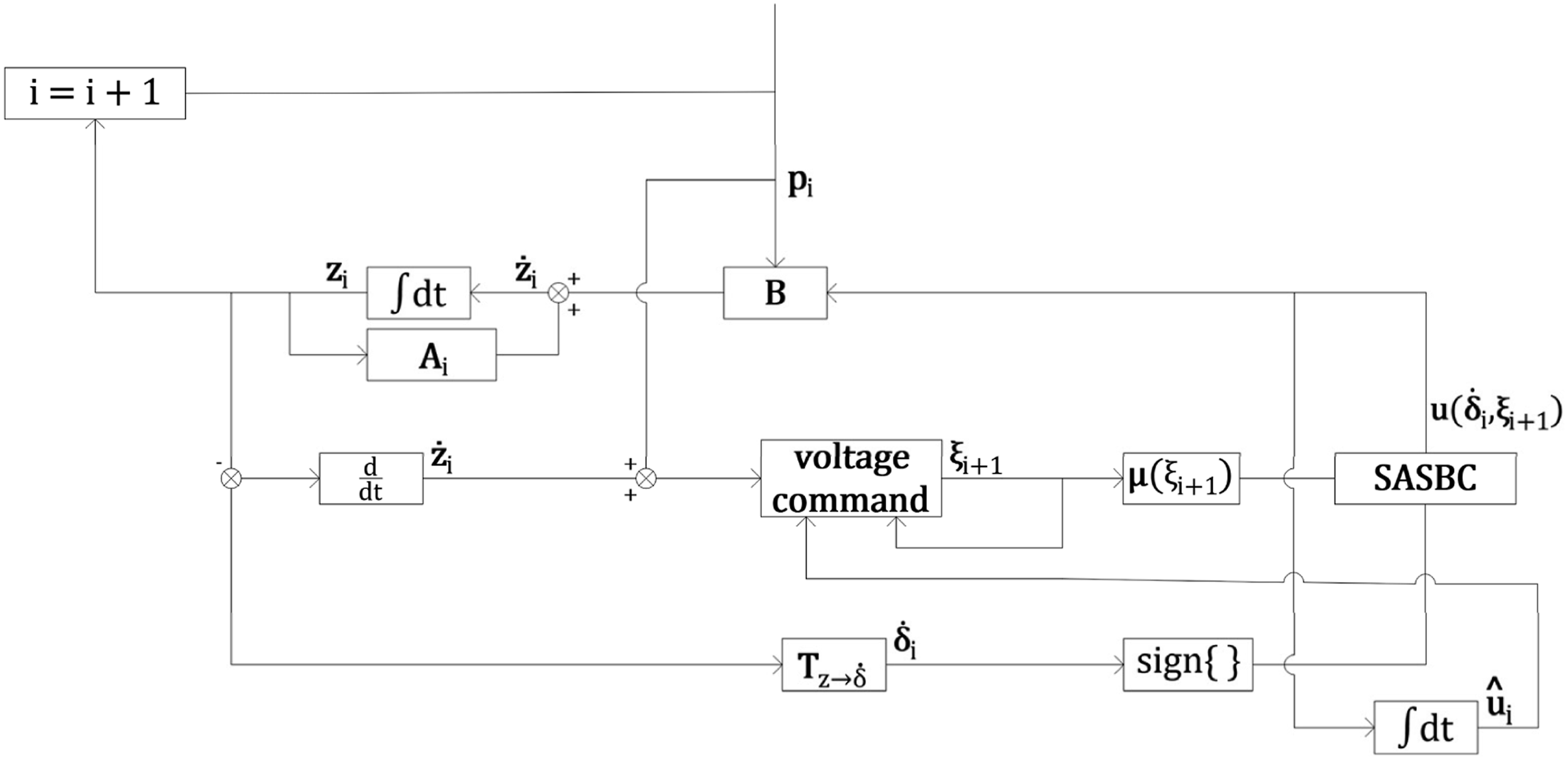
The voltage command logic is presented in Figure 8, which outlines the decision-making process driven by the state-space energy formulation. At each time step, the algorithm calculates the optimal voltage change Voltage command scheme.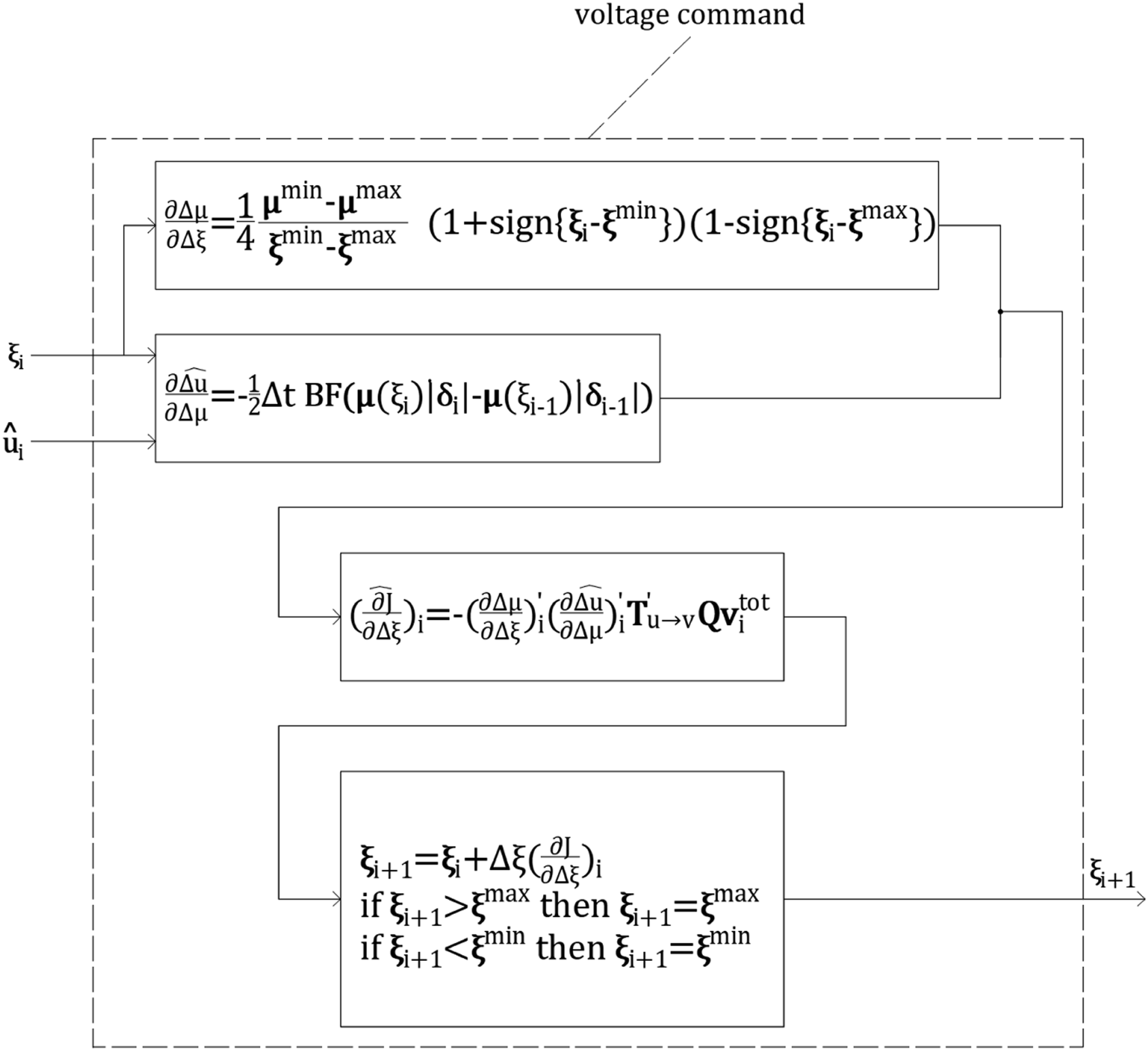
The key advantage is the implementation simplicity. The algorithm relies only on measurable quantities—interstory drift, drift rate, and known damper parameters—making it well-suited for practical deployment with existing sensor technologies. The core of the control law is reduced to a gradient-driven optimization based on precomputed or easily differentiable relations (e.g.,
5. Numerical example
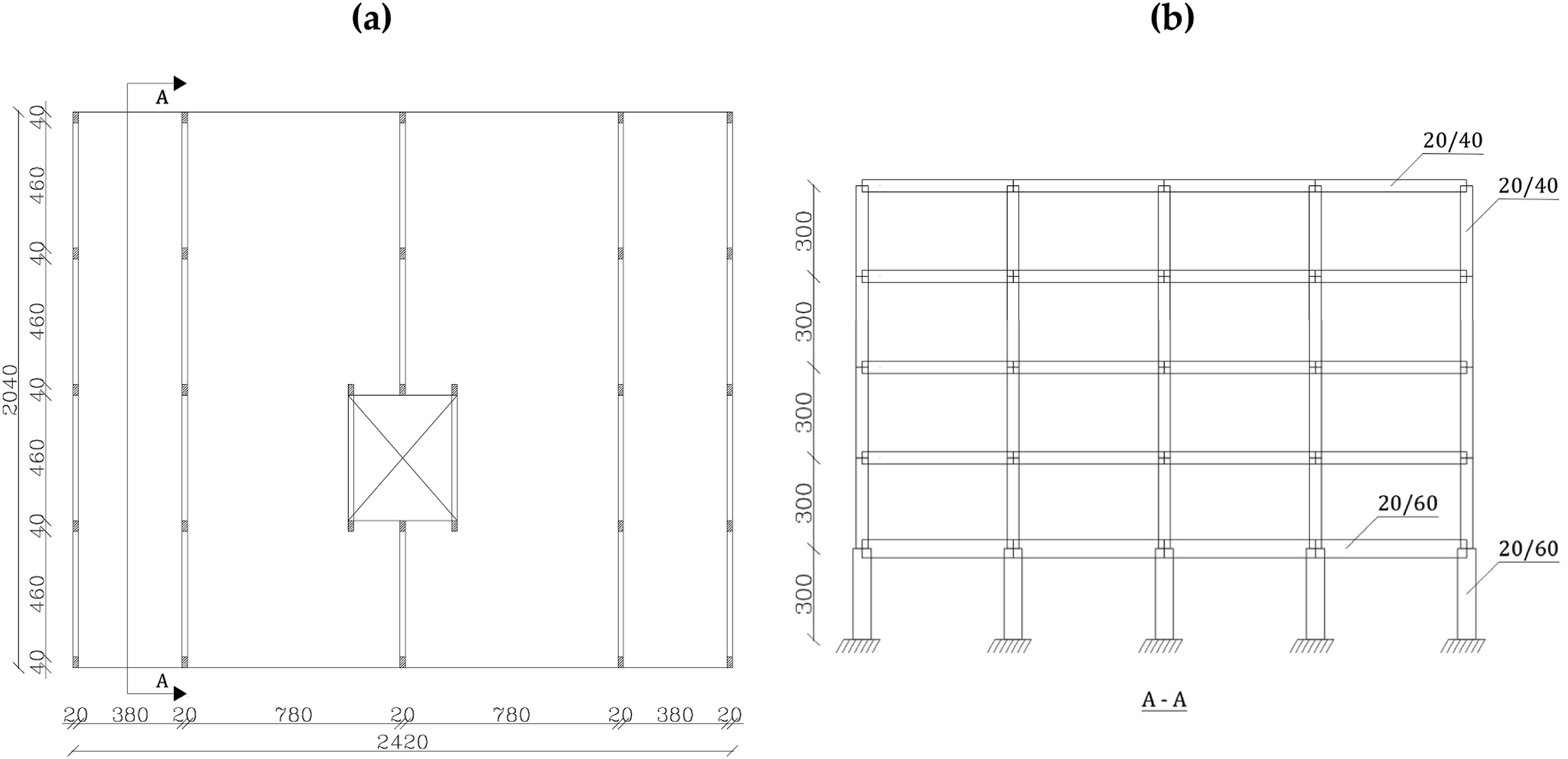
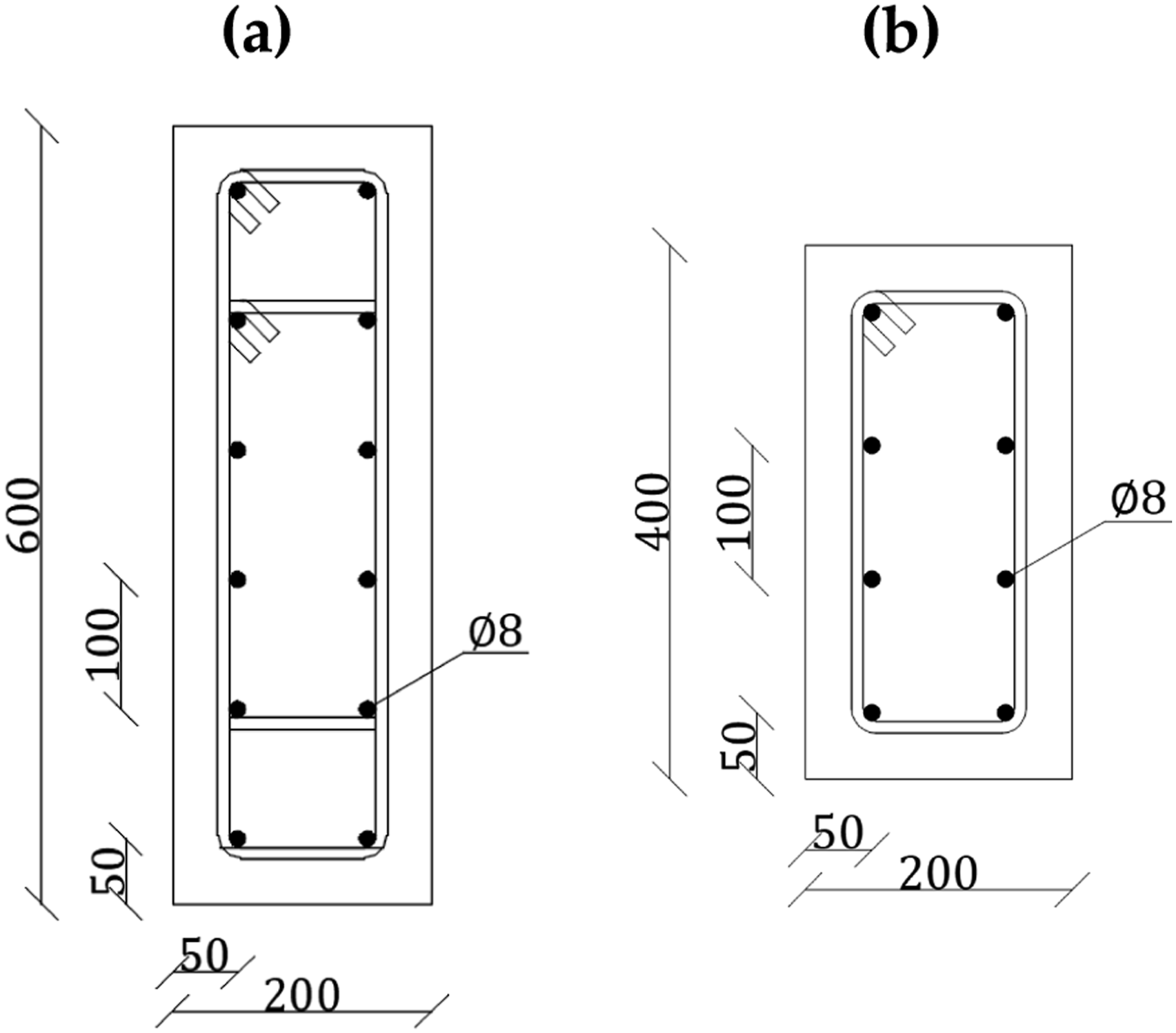
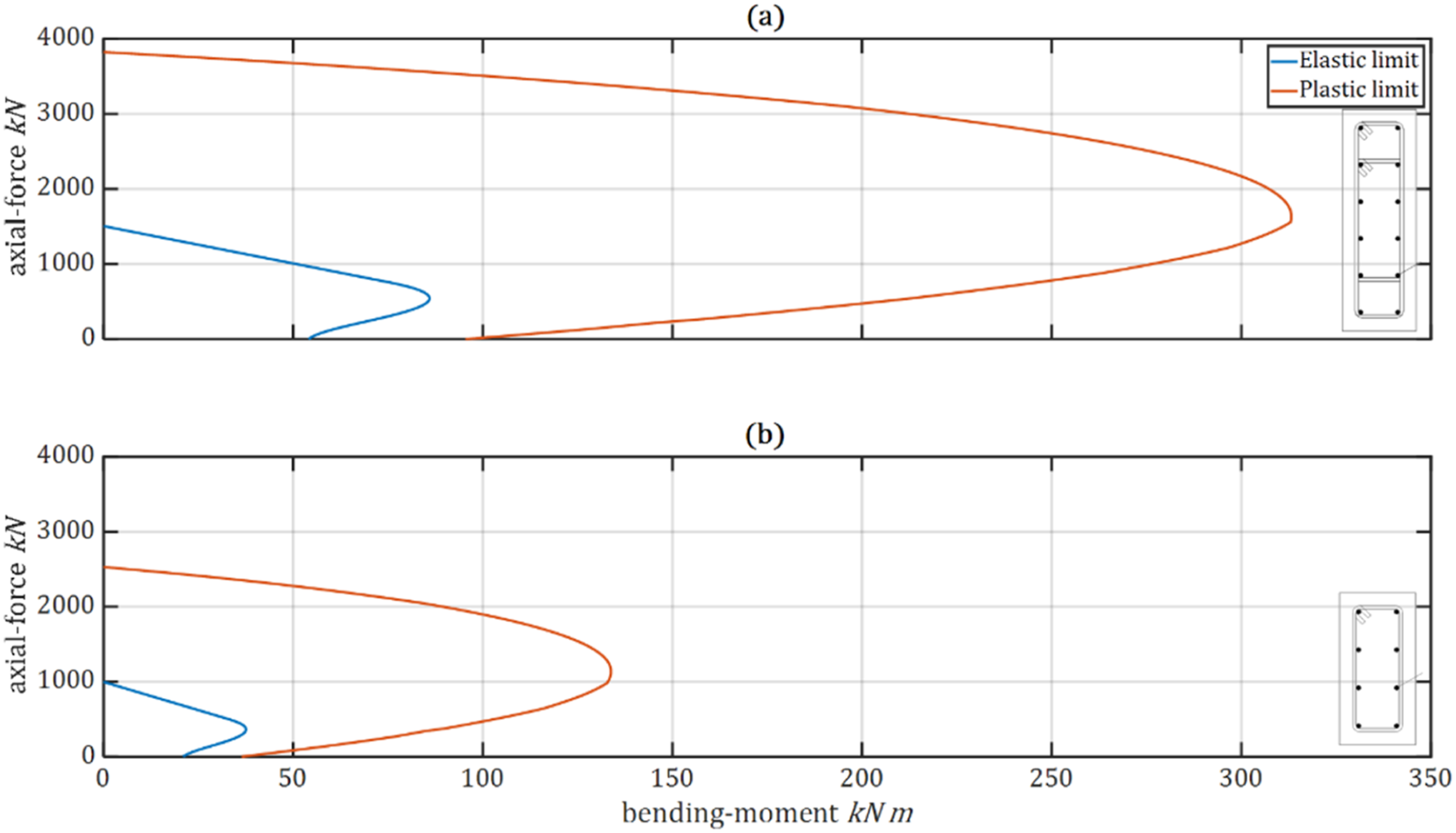
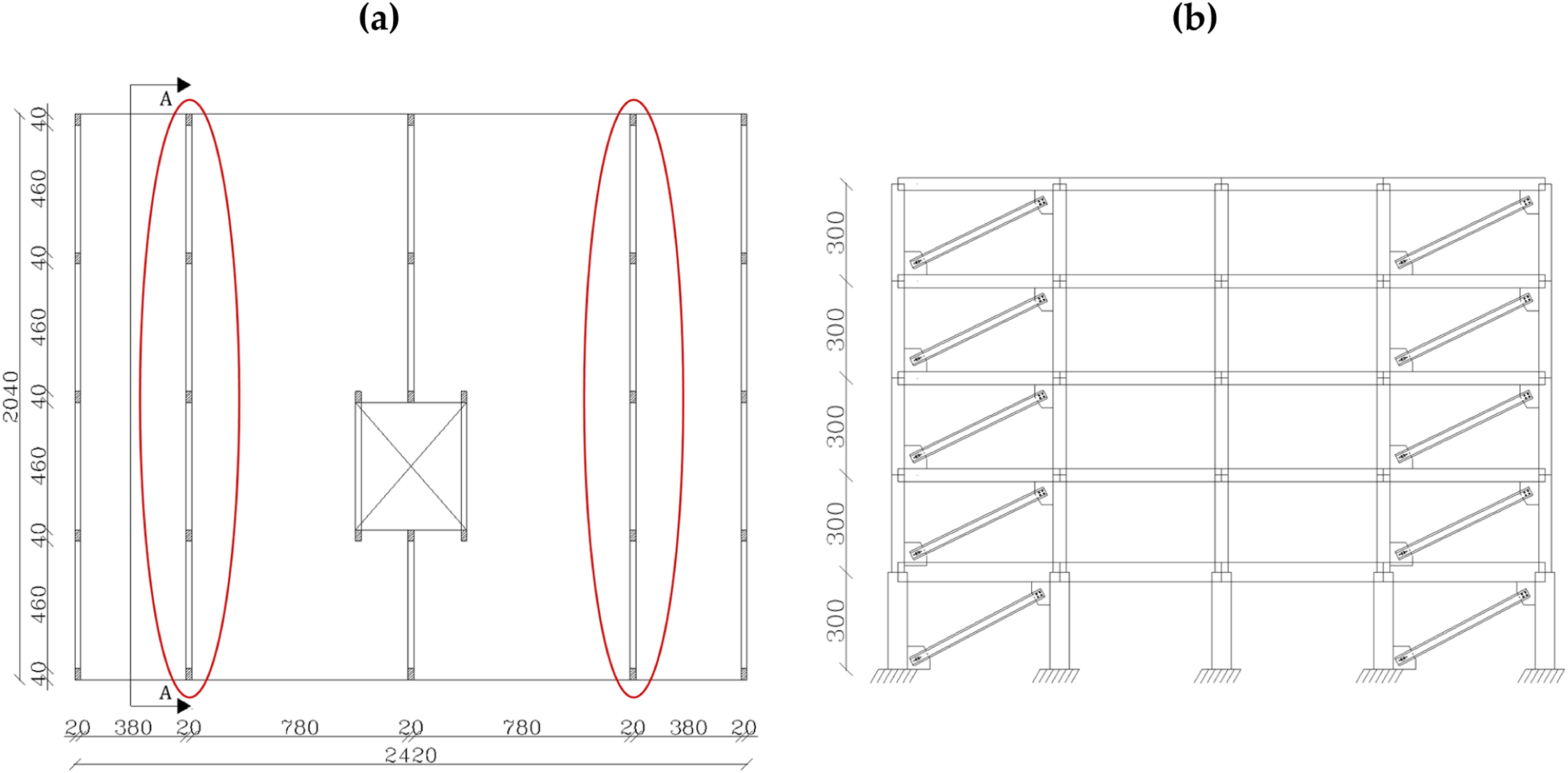
We demonstrate the SASBC control algorithm by retrofitting a five-story reinforced-concrete (RC) residential building (photo in Figure 9). The building is an older East-European–style cooperative housing block constructed ∼40+ years ago (early 1980s). The typical floor plan and elevation are shown in Figure 10. Ground-floor columns are 60×20 cm, while typical-story columns are 40×20 cm. Member cross-section details are given in Figure 11; axial-load-bending-moment interaction diagrams appear in Figure 12. Friction dampers are installed at the outermost bays of the lateral frames (Figure 13), targeting the longest spans to maximize drift capture and energy dissipation. This configuration is evaluated under both passive SBC and semi-active SASBC conditions, with comparative results presented between the two cases. Photograph of the reference five-story RC building. Numerical example building: (a) Typical floor plan, (b) elevation scheme. Cross-sections of RC members: (a) Ground-floor columns and beams, (b) typical residential floor columns and beams. Axial-load–bending-moment interaction diagrams: (a) Ground-floor cross-section, (b) typical residential floor cross-section. Friction damper retrofit configuration: (a) Allocation at lateral frames, (b) installation elevation scheme.
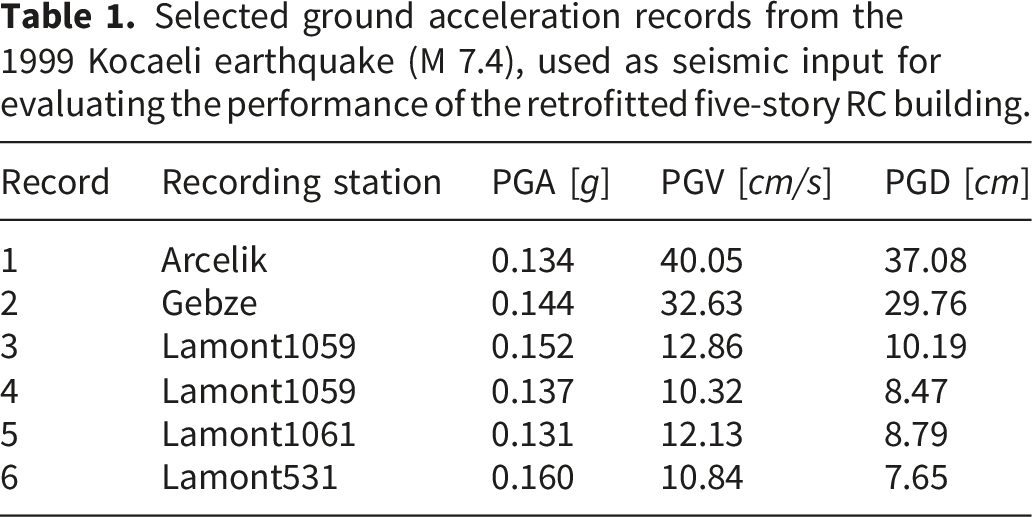
Selected ground acceleration records from the 1999 Kocaeli earthquake (M 7.4), used as seismic input for evaluating the performance of the retrofitted five-story RC building.
The subsequent analysis begins with the passive retrofit case, in which conventional SBC dampers are installed at the designated frame bays (Figure 13). This initial scenario serves as a baseline for comparison, against which the effectiveness of the proposed SASBC control algorithm will later be evaluated.
5.1. Case I: Passive friction damper retrofit (SBCs)
In the first analysis case, the building is retrofitted with passive slotted-bolted connections (SBCs) to establish a baseline for comparison with the semi-active configuration. Each damper is assigned a constant normal force of 150 kN, of which approximately 100 kN acts as the effective horizontal component resisting interstory drift. These parameters correspond to typical values adopted in practical applications, producing a stable but unmodifiable hysteretic response representative of conventional passive friction dampers. The SBCs are installed at the outermost bays of the lateral frames, as shown in Figure 13, to maximize drift capture and energy dissipation at the span ends.
Without retrofit, the bare RC frame showed severe vulnerability under several ground motions. Under Record 2, beam failures developed in the first story, triggering excessive horizontal deflections that ultimately led to collapse. Record 3 caused plastic-hinge failures at the fourth-story far-right intersection, also resulting in collapse. Record 6 produced multiple local failures in the lower stories, again culminating in collapse. In contrast, with the passive SBC retrofit, none of the simulations experienced collapse or instability, demonstrating the substantial improvement in robustness provided by the friction mechanism. Although the SBC system does not adapt to varying seismic demand, it reliably prevented the local failures observed in the bare frame and established a stable baseline performance.
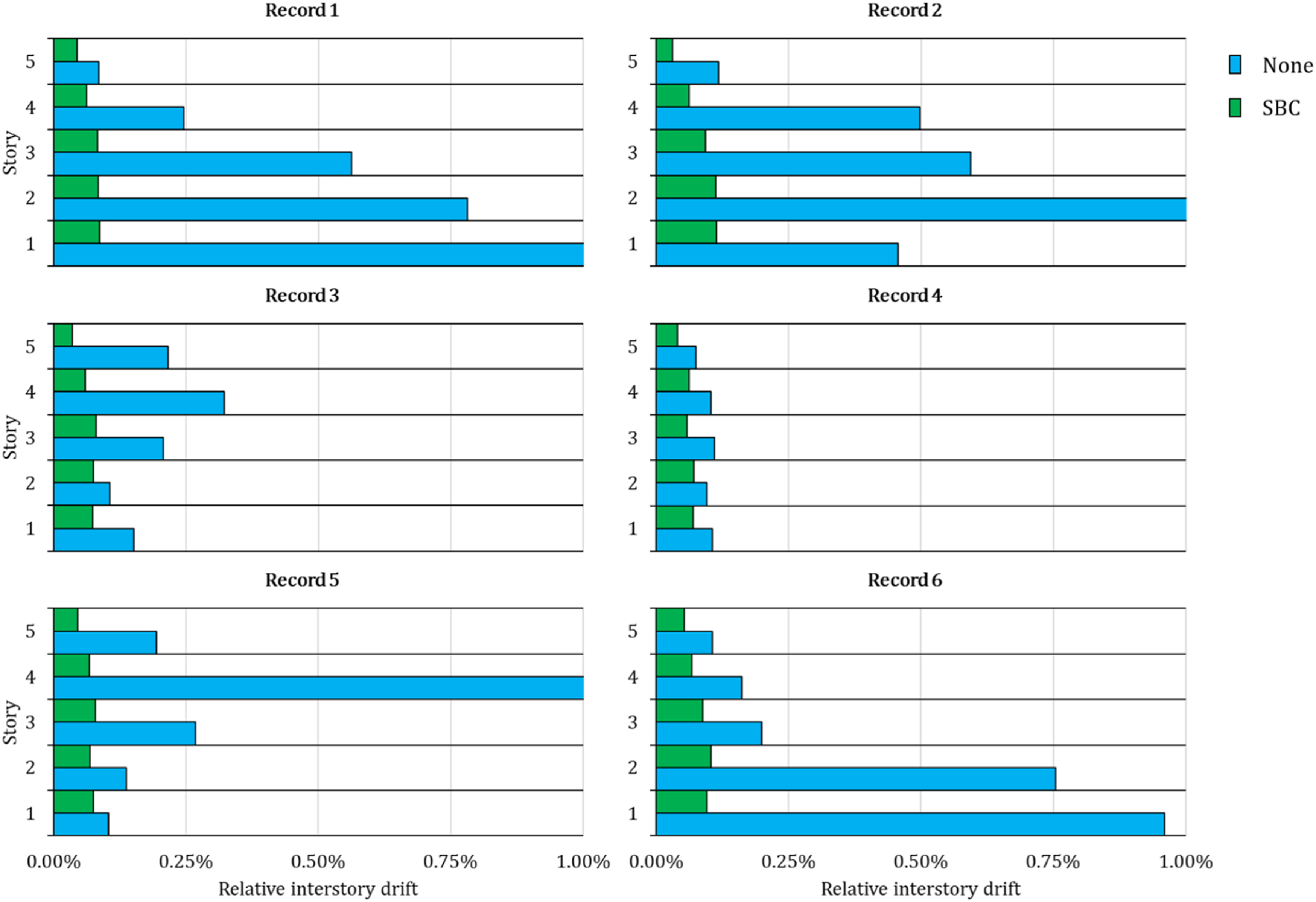
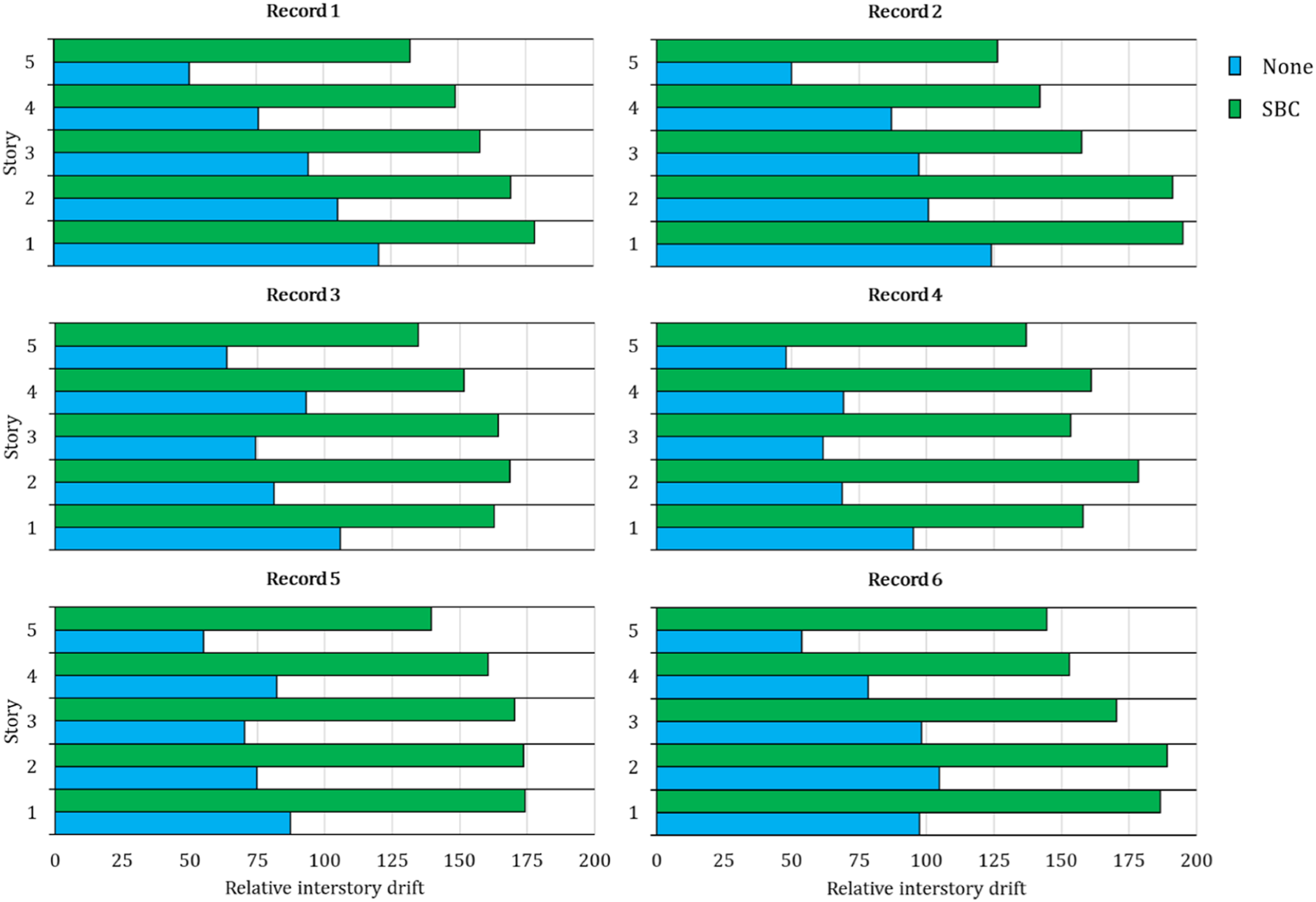
Figure 14 illustrates the hysteretic response of the first story, comparing the behavior of the bare frame with and without passive SBC retrofit. The overall peak responses are summarized in Figures 15 and 16, which present the maximum relative interstory drifts and total story shear forces, respectively. The results highlight the effectiveness of SBCs in reducing drift demands, thereby limiting excessive deformations and potential nonstructural damage. At the same time, the retrofit introduces larger story shear forces due to the added friction resistance. This outcome reflects the inherent trade-off in friction-based retrofitting: while drifts are effectively suppressed, the structure must sustain higher internal forces. Comparison of first-story hysteretic behavior for the bare frame and the frame retrofitted with passive SBCs. Comparison of peak relative interstory drifts with and without passive friction retrofit (SBC). Comparison of peak total story shear forces with and without passive friction retrofit (SBC).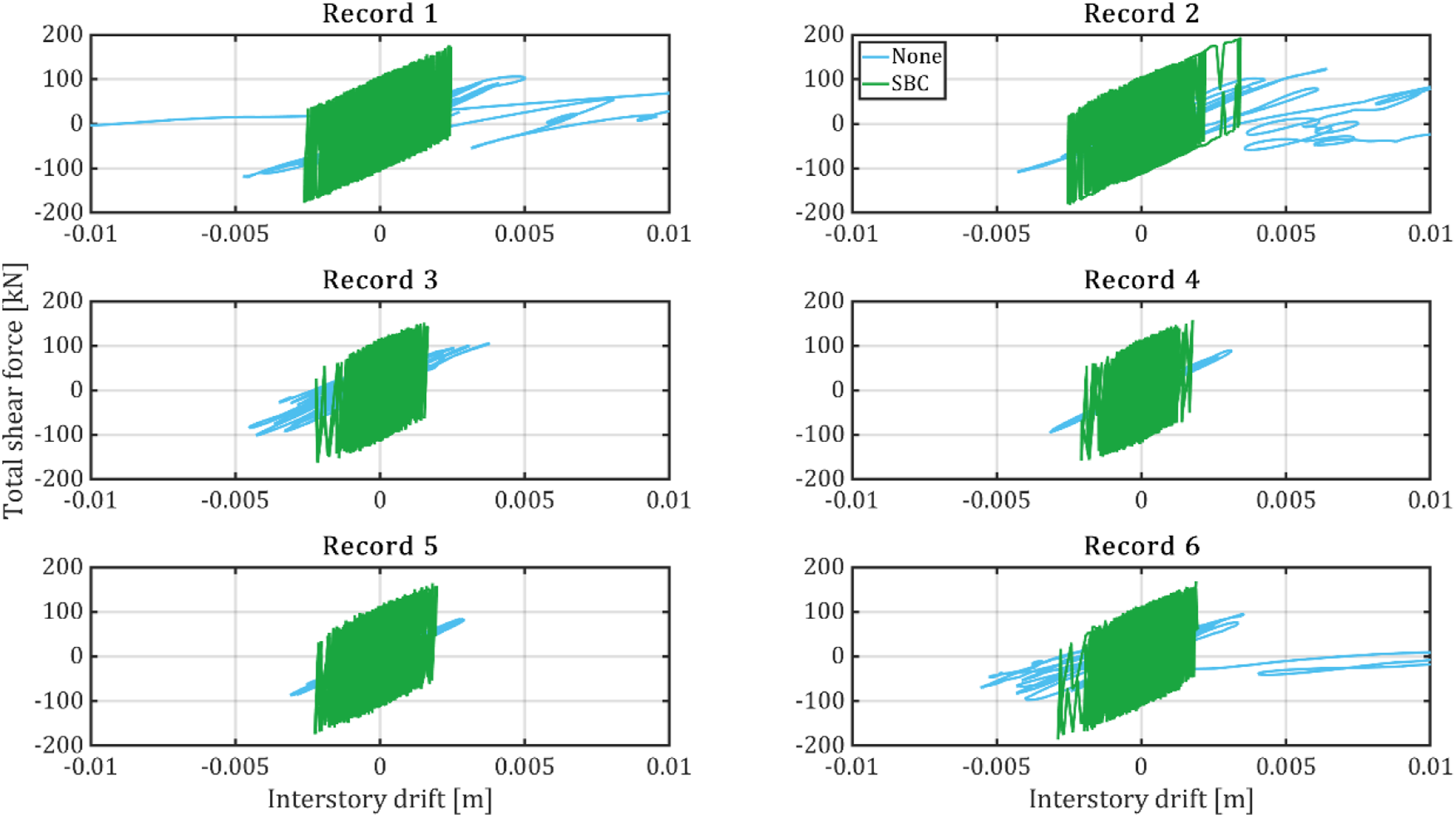
From a seismic safety perspective, the observed drift reduction is of primary importance, as excessive interstory deformations are directly associated with collapse risk. The increase in story shear forces, although notable, remains within the structural capacity of the columns and beam–column joints, confirming the retrofit’s viability. These results illustrate how even a passive implementation of SBCs can transform an otherwise collapse-prone building into a stable system capable of sustaining strong ground motions. This baseline outcome underscores the robustness of friction mechanisms and sets the stage for the subsequent case study, where the semi-active SASBC algorithm is introduced to further refine the balance between drift reduction and shear force demand.
5.2. Case II: Semi-active SASBC retrofit
In the second case, the building is retrofitted with semi-active slotted-bolted connections (SASBCs). Each device is subjected to a normal force of 150 [kN], with an effective horizontal component of 50 [kN]. The friction coefficient is actively modulated between 0.25 and 0.50, corresponding to input voltage levels of 24 [volts] and 12 [volts], respectively, as illustrated in Figure 17. In all simulations, the initial voltage is set to 24 [volts]. The control algorithm updates the input in increments of 0.1 [volts] every 0.01 [s], ensuring smooth and numerically stable adaptation. Input voltage ξ versus kinetic friction μ.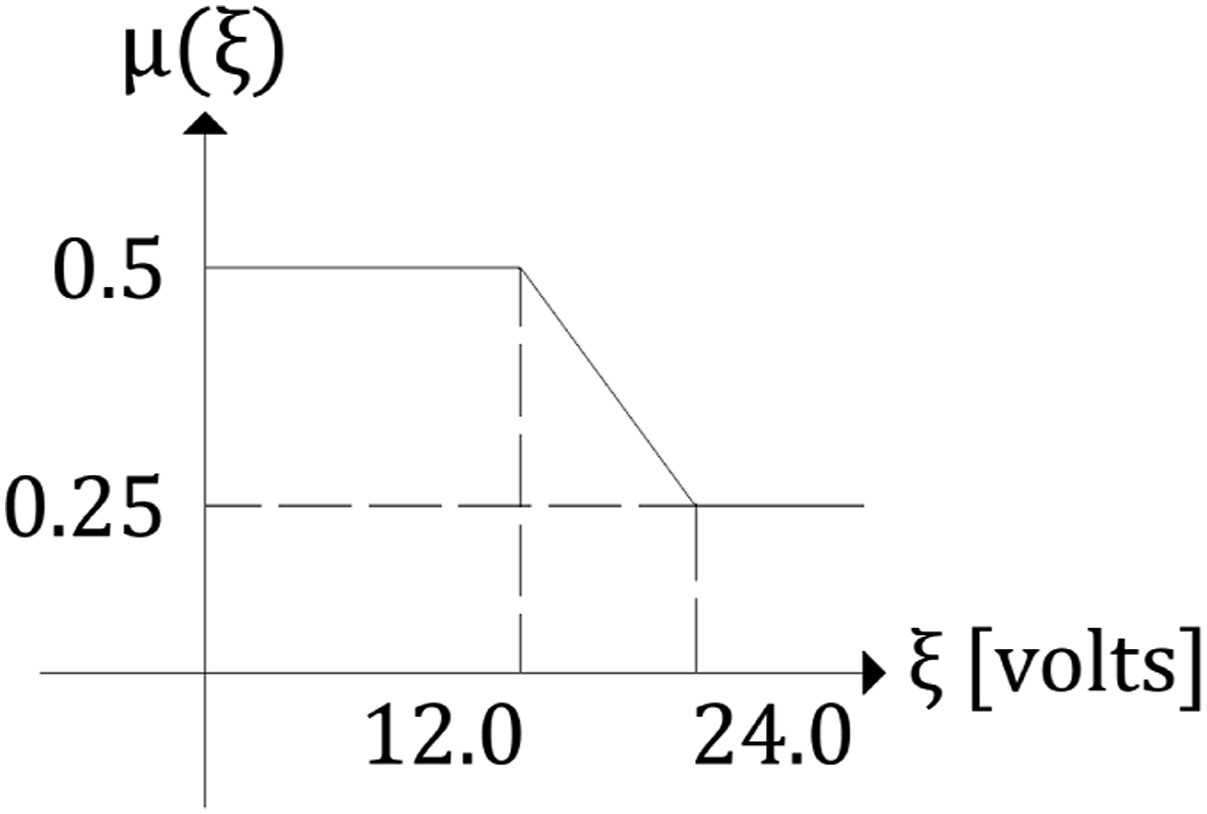
Figure 18 presents the time history of the commanded voltage across all stories. The results indicate that the algorithm generally favors keeping the voltage close to 24 [volts], thereby maintaining a higher friction coefficient for effective energy dissipation. However, during certain stages of the response, the voltage is deliberately increased, which lowers the friction coefficient and thereby reduces the associated shear forces. This behavior reflects the control scheme’s capacity to balance drift suppression with shear demand, adapting the damper response to the evolving structural state. Time history of commanded input voltage across all stories.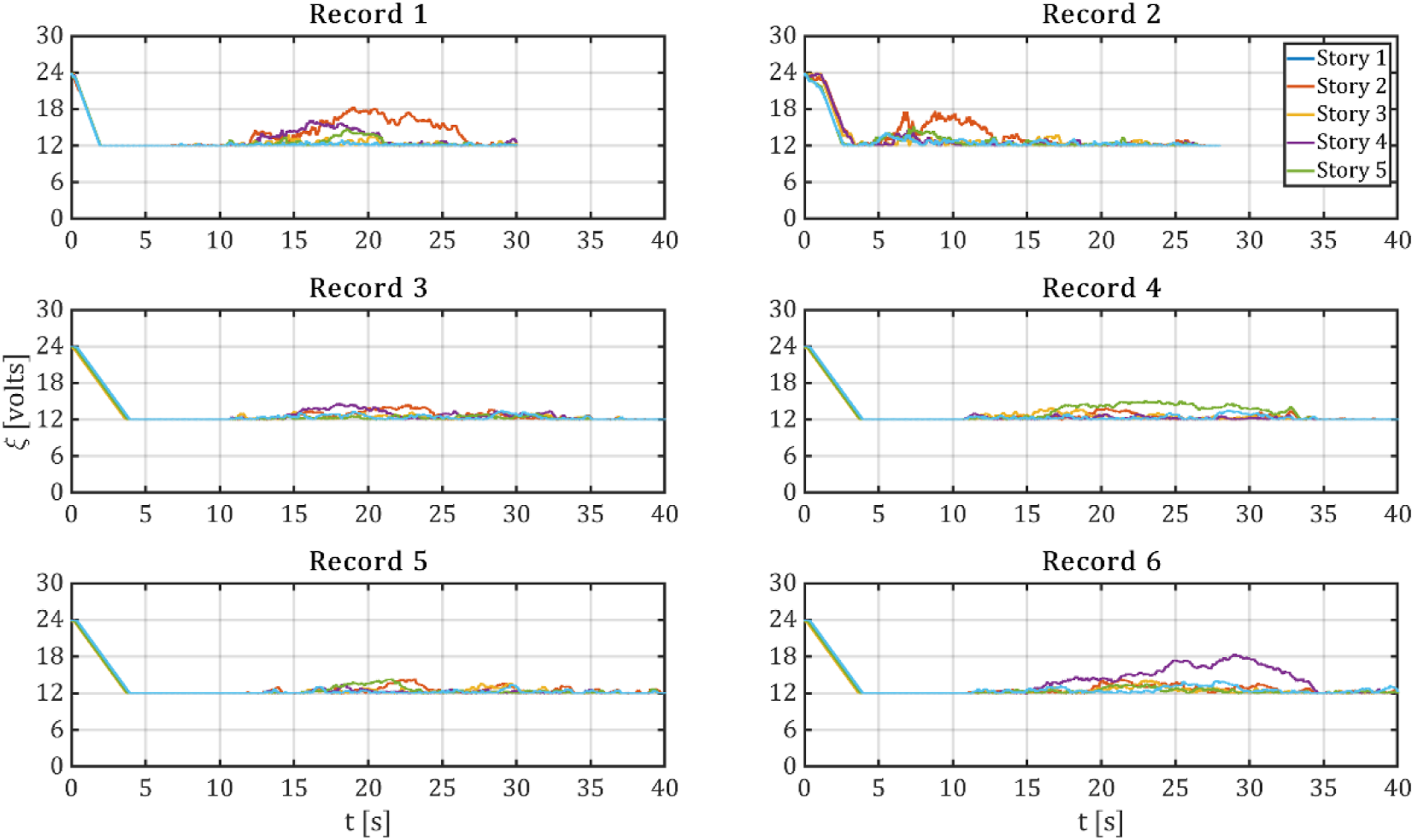
Figure 19 compares the first-story hysteretic responses of the frame equipped with passive SBCs and SASBCs. While both systems exhibit stable energy-dissipating loops, the SASBC produces smoother and more controlled hysteresis, reflecting the effect of active calibration through the energy-based control algorithm. Figure 20 presents the peak relative interstory drifts for the bare frame, passive SBC retrofit, and SASBC retrofit. Both retrofitting strategies are effective in suppressing excessive drifts, but the SASBC achieves slightly smaller demands, indicating improved performance without additional devices or higher normal forces. Comparison of first-story hysteretic behavior for frame retrofitted with passive SBCs and SASBCs. Comparison of peak relative interstory drifts with and without passive friction retrofit (SBC) and SASBC.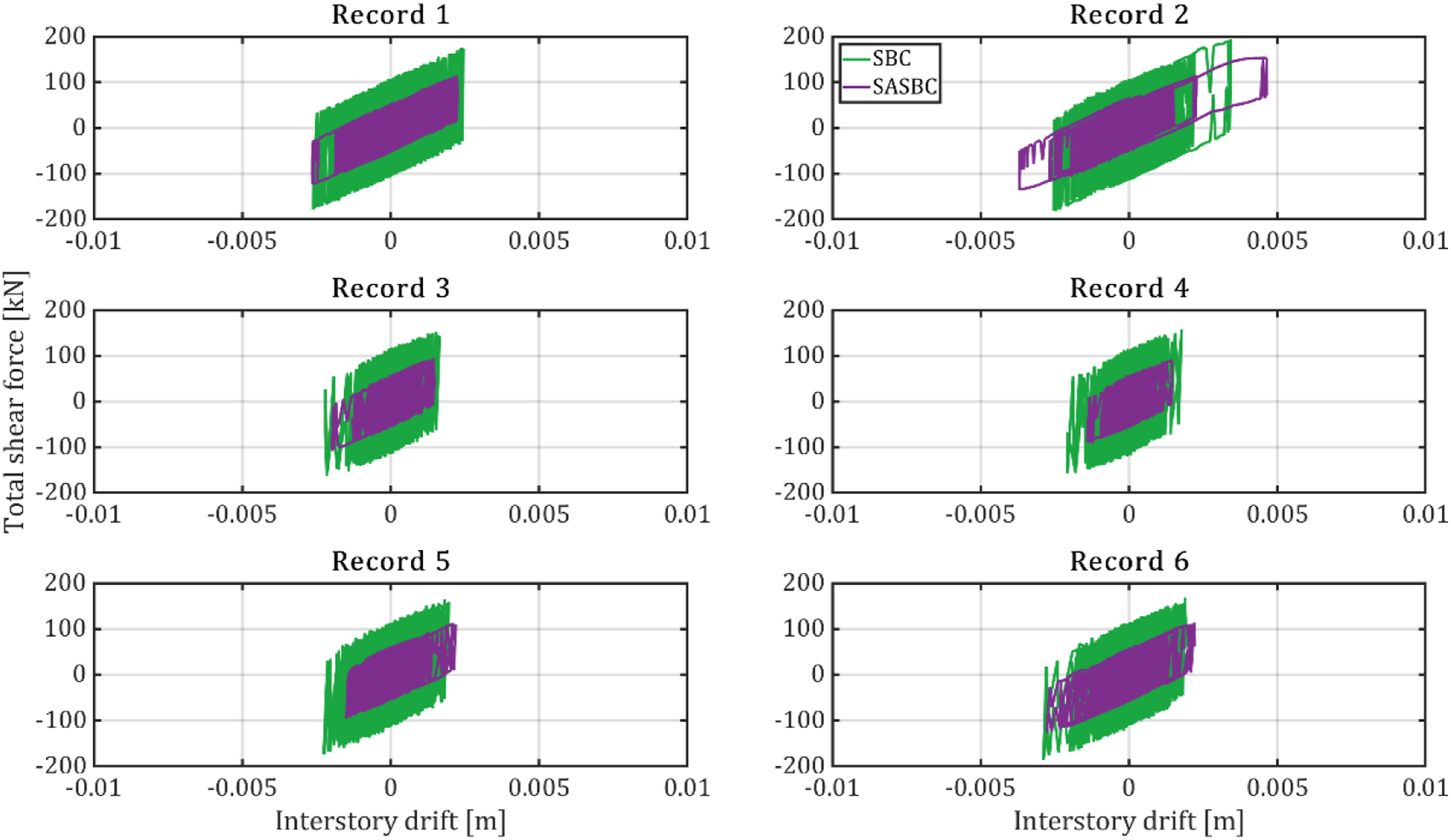
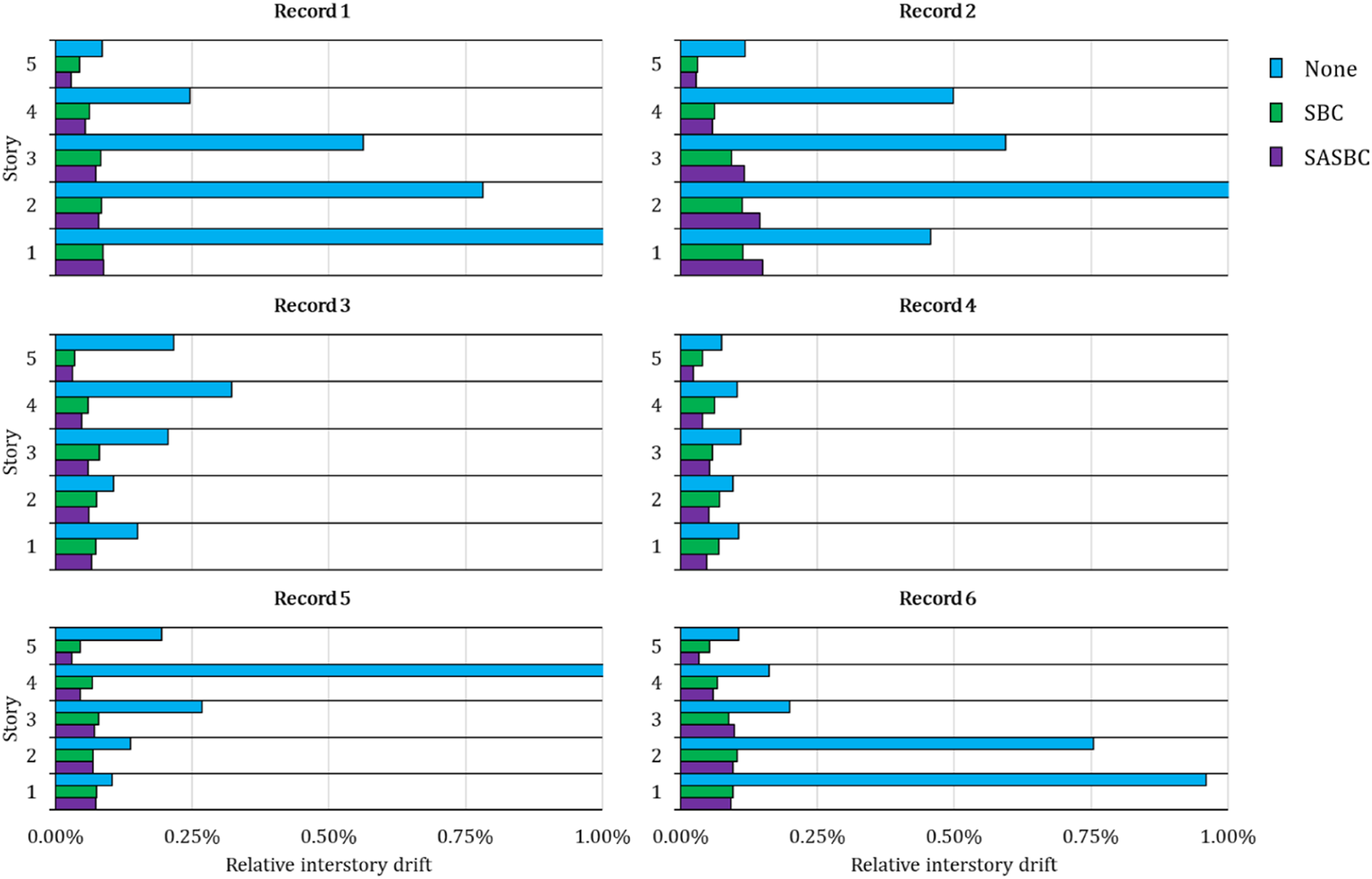
Figure 21 compares the peak total story shear forces across the three cases. Importantly, the SASBC maintains shear force demands at approximately the same level as the passive SBC retrofit. This demonstrates that the active control does not increase the force demand on the frame, while still improving drift reduction. Taken together, these results highlight the advantage of SASBCs over conventional passive SBCs: they retain the collapse-prevention capacity of passive retrofits, while introducing a voltage-controlled friction law that enables finer response tuning and smoother energy dissipation. This confirms the SASBC potential as a practical and effective retrofit solution for older RC frames. Peak total shear forces with and without passive friction (SBC) and SASBC.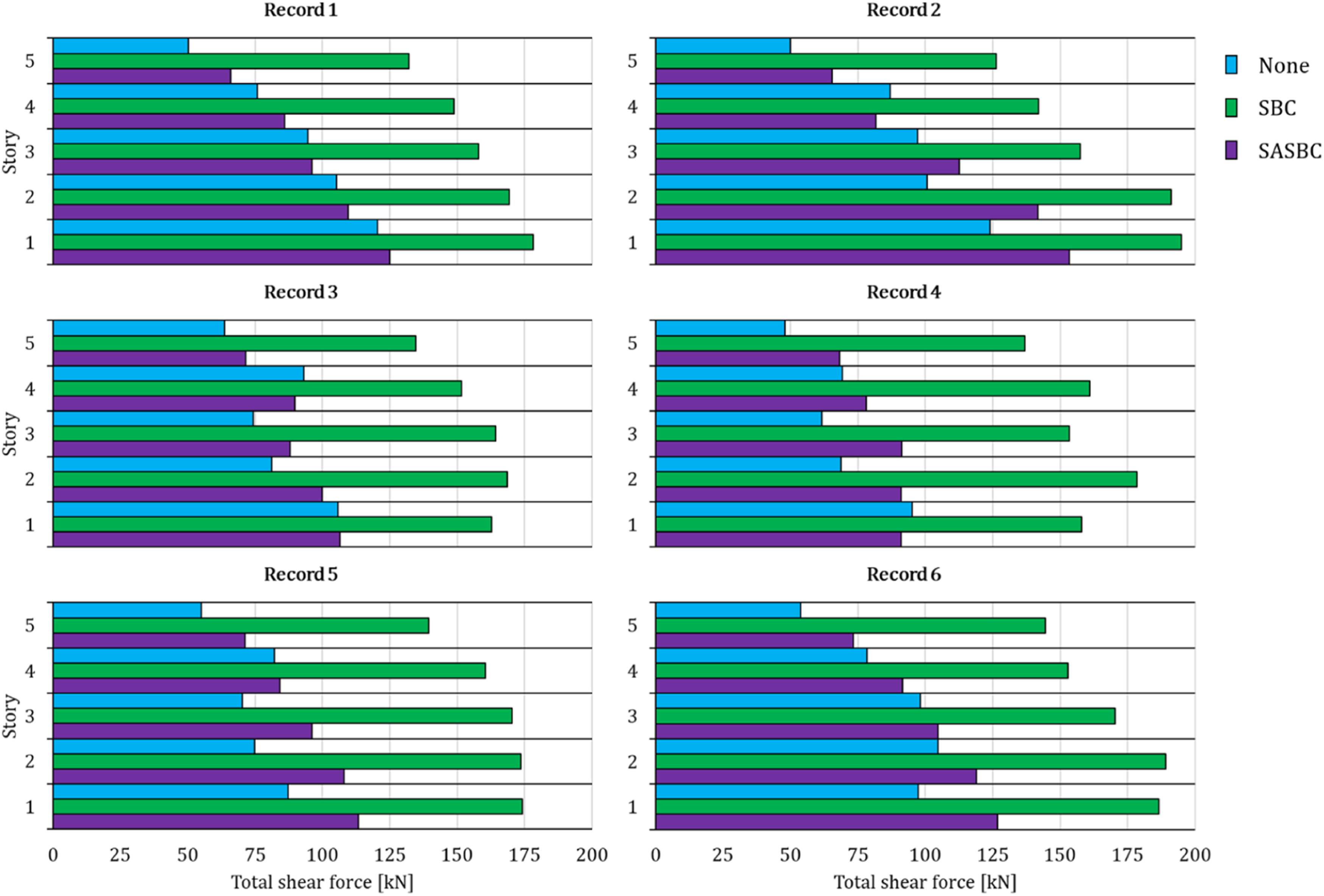
5.3. Case III: Normal force uncertainty
A well-known limitation of passive friction dampers is their reliance on a precisely calibrated normal force. In practice, the clamping force applied at the bolted interfaces is subject to several sources of uncertainty, including installation tolerances, bolt pretension loss, temperature effects, and long-term degradation. Even small deviations can significantly alter the frictional resistance of the damper and, consequently, its seismic performance. This sensitivity makes passive systems difficult to tune accurately and may lead to either underperformance (too little friction, insufficient energy dissipation) or overdesign (too much friction, excessive shear demand).
The SASBC mechanism directly addresses this limitation. By actively adjusting the effective friction coefficient through the control input voltage, the system can compensate for uncertainties in the applied normal force. In essence, rather than relying on an exact normal force value, the damper can adapt to the available conditions: if the clamping force is lower than expected, the control algorithm can increase the effective friction coefficient; if it is higher, the algorithm can reduce it to avoid excessive shear forces. This adaptive feature ensures consistent performance even when the mechanical preload is not precisely known or drifts over time.
Thus, the SASBC not only enhances the seismic resilience of retrofitted frames but also offers a practical advantage in field application. Contractors and engineers do not need to achieve perfect bolt pretension during installation, nor maintain it exactly throughout the structure’s life. The control scheme provides a safety net, adapting the damper’s behavior in real time and ensuring reliable energy dissipation despite normal force uncertainty.
Figure 22 illustrates the hysteretic response of the selected story for three values of the horizontal component of the normal force: 50 [kN], 75 [kN], and 100 [kN]. For each ground motion record, the story with the largest relative interstory drift was chosen to represent the comparison, ensuring that the most critical response is captured. Remarkably, the hysteretic loops across all three cases remain of comparable breadth and amplitude, meaning that both the dissipated energy and the peak resisting forces are maintained at similar levels. This observation demonstrates that the SASBC algorithm is capable of adapting to any applied normal force, ensuring consistent performance regardless of clamping level. Hysteretic response at the critical story for normal force levels of 50, 75, and 100 [kN].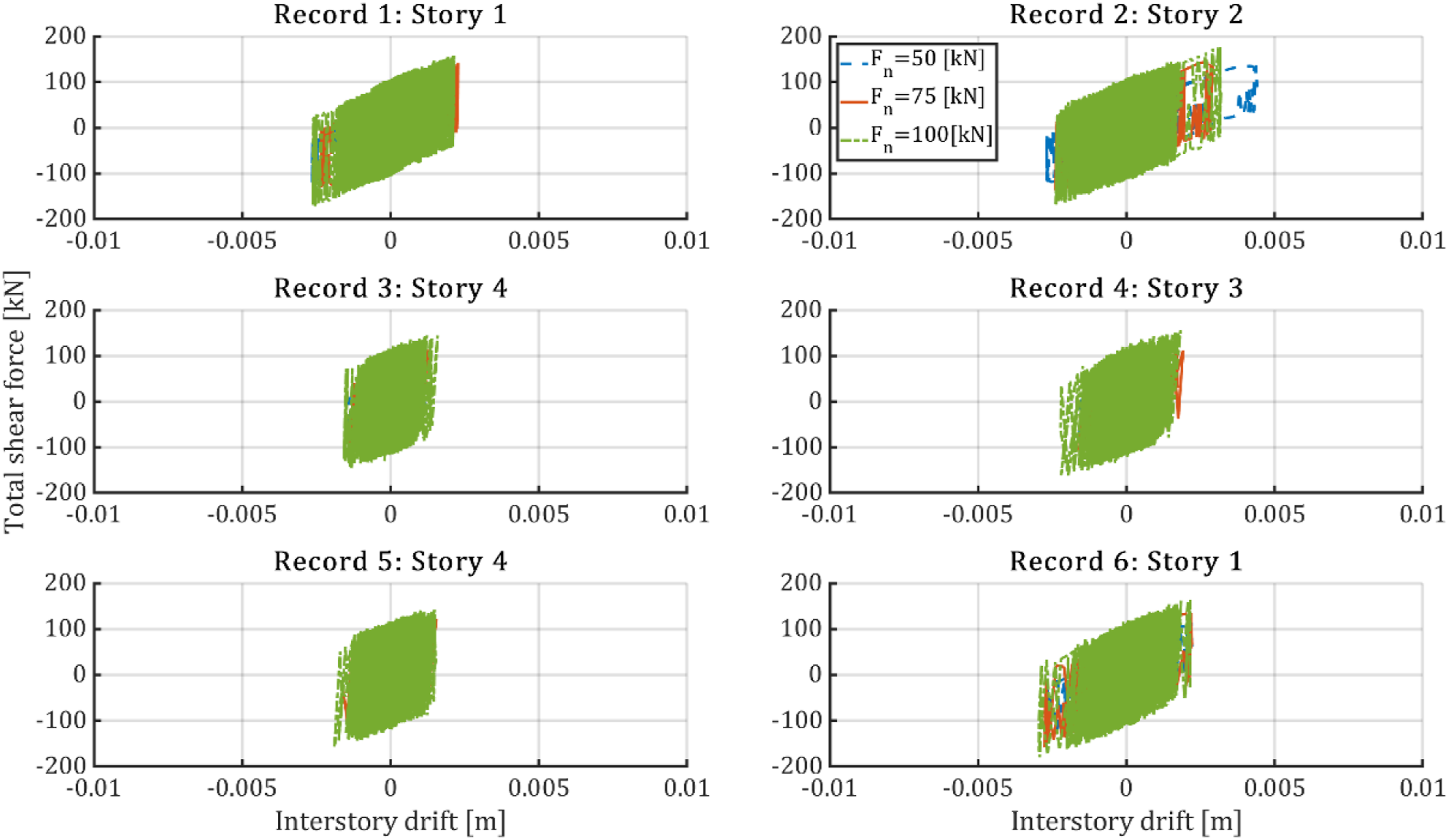
Figure 23 presents the corresponding voltage histories during the same simulations. The time traces highlight how the control algorithm adjusts its input according to the prevailing structural demand. In lower-normal-force cases (50 [kN]), the controller tends to operate at higher voltages to raise the effective friction coefficient, thereby compensating for reduced clamping action. Conversely, in higher-normal-force cases (100 [kN]), the controller occasionally lowers the voltage to avoid excessive shear forces. This adaptive strategy confirms the robustness of the SASBC approach under uncertainties in normal force application, maintaining both stability and energy dissipation efficiency. Commanded input voltage histories for the selected story under normal force levels of 50, 75, and 100 [kN].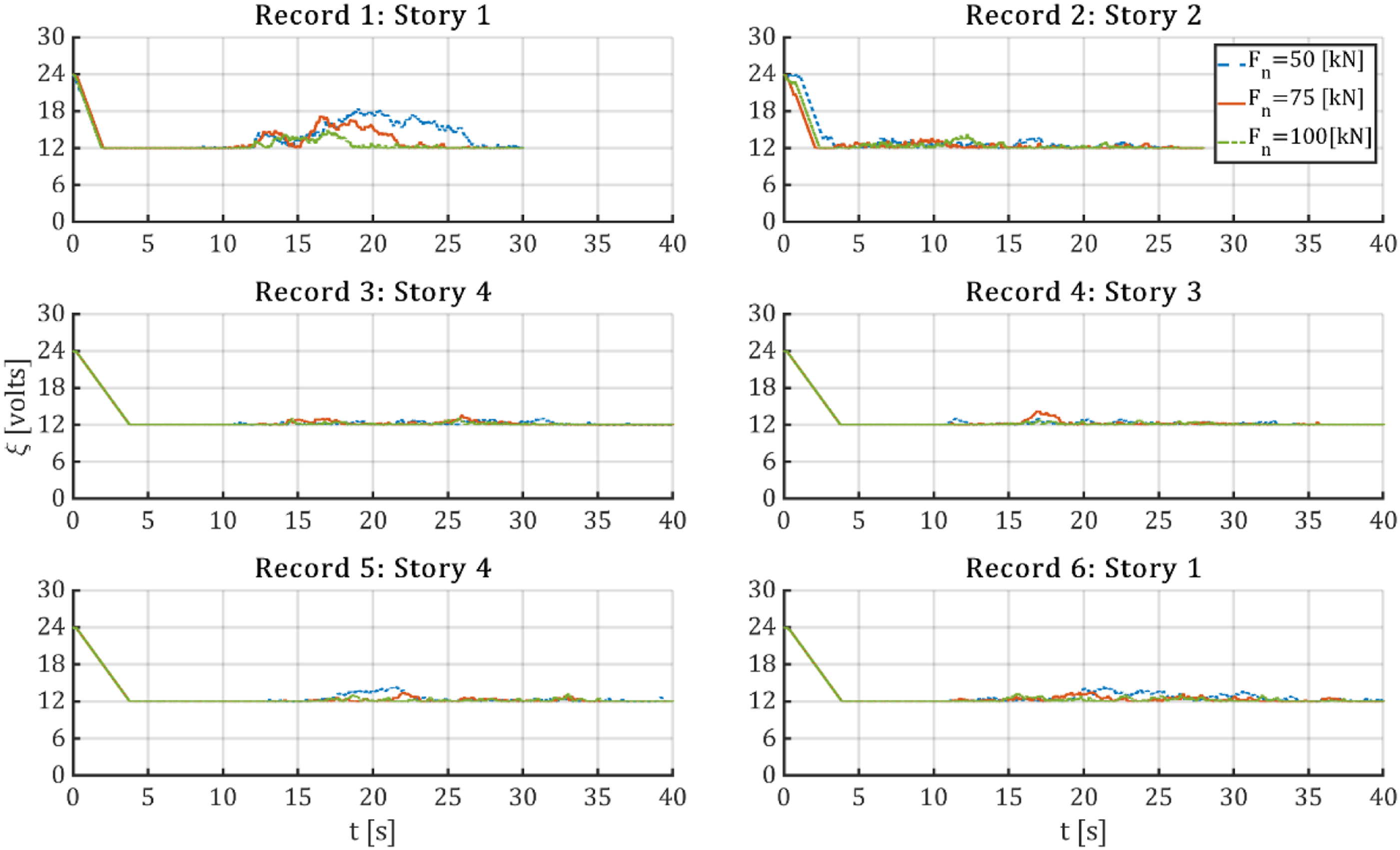
6. Conclusions
This paper presented the development and evaluation of a semi-active slotted-bolted connection (SASBC) for seismic retrofitting of reinforced-concrete (RC) frames. The approach builds on the robust dissipation capacity of passive friction mechanisms while introducing an energy-based state-space control formulation that enables real-time adaptation of the friction coefficient via voltage-controlled liquid-crystal interfaces. The key findings and contributions are as follows. 1. 2. 3. 4.
The results confirm that the SASBC combines the reliability of passive friction dampers with the responsiveness of active control, without imposing additional force demand or requiring precise calibration of normal force. This dual advantage makes the SASBC a practical and effective retrofit strategy for existing RC buildings, particularly when construction tolerances, aging, or site conditions introduce uncertainties that limit the effectiveness of passive devices.
While numerical simulations demonstrate the significant structural benefits of the proposed SASBC framework, it is important to acknowledge that this study is fundamentally theoretical. The modulation of friction via voltage-controlled liquid-crystal interfaces has been validated in existing tribological literature; however, scaling this technology to structural friction dampers introduces substantial practical challenges. Future research must address the physical feasibility of these mechanisms under the massive normal forces typical of seismic applications. Key implementation challenges include ensuring the long-term durability of the boundary lubrication films, preventing environmental degradation of the sliding plates, and maintaining a uniform electric field across large frictional areas. Consequently, while the energy-based control algorithm provides a robust mathematical foundation, the critical next step for future research will involve the fabrication and rigorous experimental testing of scaled SASBC prototypes to physically validate the adaptive friction mechanics under realistic dynamic loading conditions.
Footnotes
Author contributions
The author is the sole contributor to this work, having conceptualized the study, performed the analysis, and written the manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
Data will be made available on request.