
Abstract
Active suspensions in vehicles can apply a vertical force between the wheel and the vehicle body to reduce vehicle body motion over road obstacles, enhancing ride comfort. To incorporate road profile estimation into active suspension control, this paper proposes a wheelbase-preview predictive controller (WPMPC). The road profile of the front wheel and suspension states are estimated using the augmented Kalman filter method with the control item. Consequently, the estimated profile information from the front wheels is used to obtain the in-wheel base information by shift register. Further, the wheelbase-preview predictive model is established, involving the estimated states and in-wheelbase information. The corresponding WPMPC is formulated with the physical constraints and the dynamic deflection of suspension. The Adams-Simulink co-simulation platform is built. The comparisons are conducted on the random and impact road. The results show that the proposed algorithm has improved the root mean square (RMS) of the acceleration, dynamic deflection, and relative dynamic load of rear suspension by more than 3.68%, 6.91%, and 13.53%, compared to the traditional MPC and LQR.
Keywords
Introduction
The vehicle suspension system, as the connecting component between the body and the wheel, alleviates the impact load while vehicle driving and maintains satisfactory ride comfort. The performance of traditional passive suspension is limited due to its inherent transmission characteristics. To obtain better vehicle vertical dynamic performance, various active control strategies (eg, LQR control, 1 sliding mode control, 2 H ∞ control, 3 fuzzy control, 4 etc.) are proposed in literature. However, most of the above active control algorithms realize feedback control by extracting vehicle states. In fact, road excitation is the main input to the suspension system. If the current road surface roughness profile is accurately obtained in real-time and is added to formulate an active suspension control strategy, the ride comfort performance of the vehicle could be enhanced. 5 Therefore, accurate estimation of road roughness while vehicle driving, and incorporating road information into active suspension control algorithms are essential for vehicle ride comfort improvement.
Here are two mainstream methods for real-time road estimation: non-contact measurement and dynamic responses-based estimation. Non-contact measurement2,6–8 uses on-board laser, ultrasonic sensors, or cameras to measure the road elevation. Nevertheless, the measurement accuracy is greatly affected by the external environment and snowy weather, and the signal processing is a bit complex with high cost, so it is difficult to achieve suspension control in real vehicles. The dynamic responses-based estimation method 9 indirectly obtains the pavement elevation through relevant responses induced by the outside road excitation. Qin et al.10–12 adopted neural networks (NNs) to establish the mapping between vehicle dynamic responses and road excitation through a compact dataset to classify road level. However, the recognition accuracy depends on the volume of the training dataset. Q parameterization method13,14 reduces the error between estimated body displacement and measured value by adaptive control law so as to recognize road roughness. Transfer function method15,16 identifies road roughness based on the inverse transfer characteristics of unsprung mass acceleration under a 2-degree-of-freedom (2DoF) suspension model. Besides, Kalman filter (KF) is also widely developed for road roughness estimation. Kalman filter with unknown inputs,17,18 acquires suspension responses such as the sprung mass acceleration, unsprung mass acceleration, and displacement of 2DoF suspension model. The augmented Kalman filter (AKF)19,20 method adds the road roughness as a new state and uses common sensors to collect the vertical responses, which can observe the road profile. In general, compared to the non-contact way, the dynamic responses-based estimation method is easy to implement in a time-efficient manner and with low-cost sensors, for example, the inertial measurement unit (IMU), 21 which demonstrates significant potential for widespread application.
On the other hand, the road excitation of the front wheel can be adopted as the preview information for the rear wheel, which forms a “feed-forward” and “feedback” control framework. As a result, the dynamic performance of the rear suspension can be efficiently regulated. This helps to improve the overall chassis performance without the high cost of laser sensors and complex measurements. Kwon et al. established a 3DoF dynamic model incorporating only the vehicle body dynamics. 22 It employs the measured front wheel acceleration information as the wheelbase-preview controller of the rear suspension. Li et al. 23 applied the generalized H2 norm to design a static output feedback controller. The controller improves ride comfort and respects suspension constraints, assuming that the real road profile obtained by the front wheel as the rear wheel preview information. Zhao et al. 24 proposed a multi-objective frequency-constrained feedback control strategy based on wheelbase-preview information regarding the input delay of actuators. Model predictive control (MPC) is suitable for tackling known road information and constraints due to its receding optimization characteristics. Göhrle et al.25,26 introduced an MPC method for active suspension using the front-axle preview of road surface, which uses quadratic programming to optimize the vertical, pitch, and roll motions of the vehicle body. Song et al. 27 proposed an incremental MPC strategy for active suspension systems using road profile information estimated by leading vehicles. The above preview control method proves that the effect is significantly improved compared with the traditional control method. However, most of the above algorithms assume that the road information is known a priori, and there are relatively few studies on using controllable suspension to obtain road information and the estimated suspension states to realize online active suspension control. Hence, the combination of estimated wheelbase-preview information of controllable suspension and MPC control is promising and still challenging for active suspension systems.
Motivated by the above concerns, this paper incorporates road profile estimation with suspension control, and proposes a wheelbase-preview predictive controller for active suspension based on road profile identification. The main contributions of this paper are as follows: Based on AKF, the estimated road profile of front wheel is applied to obtain the wheelbase-preview model through the shift register, which is integrated with the half-car suspension dynamics to formulate the wheelbase-preview predictive model within prediction horizons. These trials allow a more comprehensive representation of vertical characteristics within a uniform format, where the road excitations of front wheel provide feedforward time-domain information for rear suspension regulation. As a result, the ride comfort of the vehicle can be improved.
The outline of the paper is as follows. We first establish the 4DoF suspension system model and road profile model. Then, the AKF is introduced to estimate the road profile of the front wheel and suspension states. Moreover, the shift register is elaborated therein to design the wheelbase-preview predictive controller (WPMPC). The Adams-Simulink Co-Simulation platform is built, and verifications are conducted on the random and impact road, respectively. Finally, conclusions are reached.
Half-car suspension system dynamics model
Four-degree-of-freedom suspension model
The four-degree-of-freedom model, or half-car model, represents the pitching and bouncing vibration of the vehicle relatively, which assumes that the road excitation of the left and right sides is the same. A semi-vehicle linear model is established, as shown in Figure 1 and Table 1. Four-degree-of-freedom (half-car) suspension model. Nomenclature of half-car suspension dynamics.

According to Newton-Euler equations, the dynamics of a four-degree-of-freedom suspension system is:
Assuming that the pitch angle is small, then the vertical positions of the front and rear axle body are approximated as:
Road profile model

Road roughness classification.

The random road profile is generated using the harmonic superposition method with power spectral density G
q
(n) as:
Besides the random road, the input road is another typical road that seriously affects the ride comfort of the driver and passengers. According to JTT 713-2008, the recommended width is 300 ∼ 400 mm, and the height is 30 ∼ 60 mm. The height of the impact road is approximated by the quadratic function:
Wheelbase-preview controller with estimated road profile
The framework of wheelbase-preview informed active suspension control is demonstrated in Figure 2. The control algorithm mainly consists of two components: An augmented Kalman filter with the control item (AKF) and a wheelbase-preview model predictive controller (WPMPC). In concrete, based on the current output The framework of wheelbase-preview informed active suspension control.
Road profile and suspension states estimation by AKF
Considering the modeling error and the measurement noise, based on (1) and (2), the state space of the half-car suspension dynamics model is:
As a result, we add the unknown road input as a new state, and the augmented state vector is 
The discrete-time space of (7) is:
To ensure the estimation of the states from the output vector, we check the observability of (8). Regarding the discrete state system, the observation matrix is defined as:
Before conducting the AKF to estimate the road roughness, we first define the initial error covariance.
1: Obtain priori status vector 2: Update the a priori status error covariance matrix 3: Calculate the Kalman gain 4: Correct the posterior status vector 5: Update posterior status error covariance matrix





Wheelbase-preview predictive controller
Since the model predictive controller can regulate the states within the prediction horizon, it can be used to form a preview control using the estimated road profile information. The road information between the front and the rear wheels, i.e., the range of the wheelbase, is obtained through the shift register by the estimated road profile of the front wheel, and the predictive model of the active suspension is formulated. The objective function is solved online under state and input constraints. The optimal control forces are applied to improve the suspension performance.
Road preview in wheelbase using shift register
In terms of straight driving, the front and rear wheels will undertake the same road excitation. As a result, future rear wheel input can be inferred from the estimated road surface of the front wheels. The road excitation of the front and rear wheels is:
Further, to achieve more accurate wheelbase-preview results, the shift register transmits the road height of the front wheels to the rear wheels by numerical storage. We denote the wheelbase-preview vector as Road preview model in wheelbase using the shift register.

The compact form of (15) is:
The extended state space incorporating preview road information
The discrete-time state space expression form of (6) is
Based on (16) and (17), we further define the extended state as 
The road height of the rear wheels has been previewed by the input of the front wheel, so the state response of the half-car model can be obtained only by the front wheel road input.
The main aim of the active suspension is to minimize the body acceleration and the relative dynamic load of the tires, which guarantees the dynamic deflection of the suspension. Therefore, the system outputs are the acceleration of the front and rear suspension and the displacement of the front and rear suspensions. Meanwhile, since the wheelbase-preview information has been included in the extended state vector, the displacement of the rear wheels can be directly obtained by linear combinations of the extended states.
Further, the output vector is defined as:
Wheelbase-preview predictive model
The predictive model evolves the outputs within the prediction horizon to optimize the control forces of suspension. At time k, since the future road excitation of the rear wheels already exists within the wheelbase range, the responses of the rear suspension can be predicted more accurately through the receding of state space. It should be noted that if the control horizon is N
c
and the prediction horizon is N
p
, the constraints N
c
≤ N
p
≤ Nl need to be satisfied. Finally, the predictive model is evolved as:
Finite-time constrained optimization for control forces
The objective function during the prediction horizons is:

Define the control sequence 
Then, the constrained optimization problem can be converted into standard quadratic programming as:
The optimal sequence
Validations and discussions
Vehicle parameters for Adams/Car and MATLAB/Simulink co-simulation.

Random road
The vehicle multi-body dynamics model in Adams/Car is set to run at 10 m/s on the ISO-C road with a length of 100 m.28,29 The simulation step size is 10 ms. The prediction horizon N
p
and the control horizon N
c
are 20 and 4, respectively. The output weight matrix
The road excitation of the front wheel estimated by AKF is demonstrated in Figure 4. The correlation coefficient between the estimated and the true road profile under the WPMPC is 0.9819, with the root-mean-square error (RMSE) of 3.1408 mm. This indicates that the AKF algorithm can estimate the random road excitation of the front wheel, thereby providing more precise road profile information for the rear wheel. Road roughness estimation on random road.
Similarly, the states estimated by the AKF are compared with the benchmark states from Adams/Car in Figure 5. The estimated sprung mass is more accurate than that of the unsprung mass. This is because the tire damping coefficient on unsprung mass has been ignored, resulting in a bit mismatch of the vibration response. Comparisons of state estimation on random road.
In Figure 6, the rear sprung mass acceleration, the dynamic deflection, and the relative dynamic load of the WPMPC are significantly improved with moderate control force than the passive suspension. However, the rear sprung mass acceleration is inferior to that of MPC, which has a larger relative dynamic load than the passive suspension. In addition, the dynamic deflection of the rear suspension is almost unchanged under the MPC, compared to the passive suspension. Furthermore, the LQR controller, which also lacks preview information, exhibits improvements in sprung mass acceleration and dynamic deflection but presents an increase in relative dynamic load. Comparisons of rear suspension control on random road.
Statistical results of rear suspension control on random road.

For the front axle responses on the random road, as illustrated in Figure 7, all three control strategies, including LQR, MPC, and WPMPC, show improvements over the passive suspension. Since the front axle directly encounters the road excitation, the resulting responses are relatively close among the three controllers. Consequently, the performance differences among them are small. Comparisons of front suspension control on random road.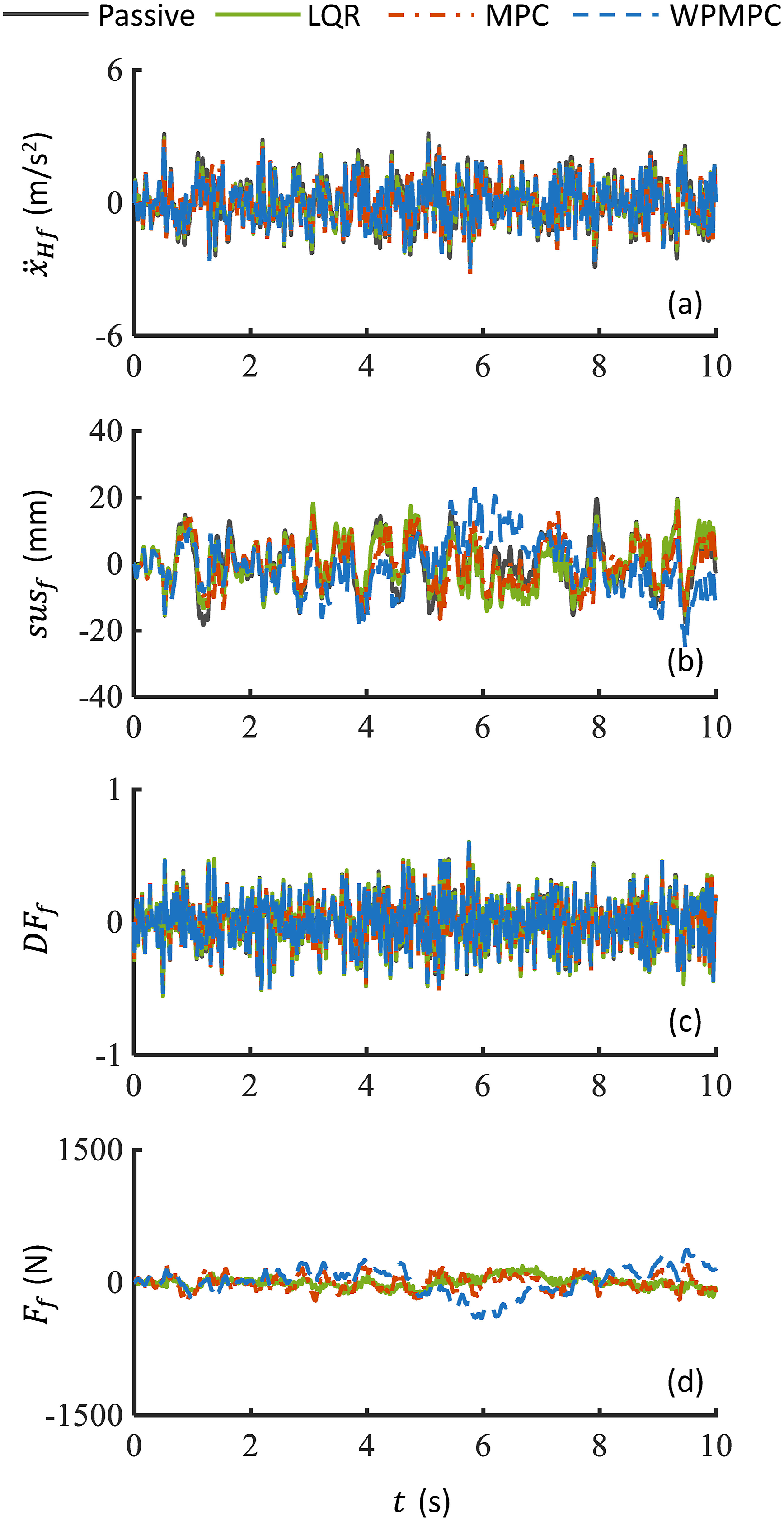
Statistical results of front suspension control on random road.

Impact road
The simulation is carried out on an impact road with a length of 12 m under the same co-simulation platform.28,29 The vehicle speed is 4 m/s, and the simulation step size is 10 ms. The prediction horizon N
p
and the control horizon N
c
are set to 35 and 10, respectively. The output weight matrix is
The road profile estimation results of the front wheels on the impact road under the control of WPMPC are shown in Figure 8. The correlation coefficient between the estimated road profile and the true road profile under the control of WPMPC is 0.8799, with an RMSE of 2.634 mm. This indicates that the AKF algorithm can accurately estimate the impact of road excitation on the front wheel, thereby also providing more precise road profile information for the rear wheel. Road roughness estimation on impact road.
There are two obvious fluctuations in the estimation of the impact road at about 1.1 s and 1.7 s (Figure 9). The former is because of the sudden change in the road excitation of the front wheel, and the front suspension has an inherent time delay to alleviate the impact excitation. When the rear wheel passes the impact road around 1.7 s, due to the coupling effect of the front and rear suspensions, the results of the front suspension will also be affected.
Since the vertical and pitch vibration of the sprung mass can be measured, the state estimation for the sprung mass is relatively accurate, while the state estimation error of the unsprung mass is large. Furthermore, the vibration response matching error is relatively significant because tire damping has been neglected. Comparisons of state estimation on impact road.
Figure 10(a) ∼ (c) presents the sprung acceleration, dynamic deflection, and relative dynamic load of the rear suspension under the MPC and the WPMPC, while the active control force of the rear suspension is shown in Figure 10(d). Comparisons of rear suspension control on impact road.
Compared with the passive suspension, the dynamic performances of the suspension controlled by the WPMPC exhibit apparent changes around 1 s, 1.68 s, and 2.36 s, respectively. At 1 s, the front wheels begin to cross the bump. Due to the coupling effect between the front and rear suspensions, the rear suspension also activates the WPMPC to apply control forces. At 1.68 s, the rear wheel is about to cross the bump. Because the road excitation has already informed the controller for the rear wheel, it starts to apply the control force in advance before 1.68 s. This can enhance the suspension dynamic performances. Moreover, the coupling effect leads to the road profile of the front wheel being misidentified at 2.36 s, which is wrongly transferred to the rear wheel. This induces the unexpected control force to interact with the road impact. Consequently, it leads to an inferior response to the passive suspension. Since the MPC has no a priori road profile information, there is no additional control at 2.36 s. However, the lack of consideration for road profile information results in a deterioration of handling stability to some extent.
Statistical results of rear suspension control on impact road.

In contrast to the passive suspension, the RMS and the P-P values of the rear sprung mass acceleration of the MPC are improved by 9.70% and 5.54%, respectively. However, the RMS and the P-P values of the relative dynamic load are degraded by 2.70% and 1.72%, respectively. The LQR controller also demonstrates noticeable improvement on the impact road, reducing the RMS of sprung mass acceleration and dynamic deflection by 15.03% and 7.65%, respectively, though its RMS relative dynamic load increases by 4.71% and the P-P value remains nearly unchanged. While using the WPMPC, the RMS of acceleration, dynamic deflection, and relative dynamic load of the rear suspension has been optimized by 13.38%, 12.45%, and 10.83% over the passive suspension. Additionally, the P-P values of these three performance indicators increase by 10.00%, 4.99% and 9.58%. This verifies that the WPMPC is also applicable to resist the excitation of impact road.
By incorporating the wheelbase-preview road profile from the front wheels, the WPMPC can take actions in advance to mitigate the coming excitation for the rear suspension so that the ride comfort of the driver and passengers is promoted. This proactive approach accelerates the response of the rear suspension to impact road, resulting in satisfactory ride comfort.
For the front axle on the impact road, as shown in Figure 11, the differences among the control strategies remain modest for the same reasons as in the random roads. The front suspension receives the road shock directly and therefore cannot benefit from preview information in the same way as the rear suspension. As a result, all three controllers improve the vertical performance to a comparable extent. Comparisons of front suspension control on impact road.
Statistical results of front suspension control on impact road.

Conclusions
This paper adopts the AKF to estimate the vehicle states and the road excitation of the front wheel. The road profile information within the wheelbase range is then obtained through the shift register. Based on the estimated states and wheelbase-preview road profile, a wheelbase-preview predictive controller is proposed to optimize the dynamic performance of the rear suspension under constraints. The validations are executed on Adams-Simulink Co-Simulation platform. The results of random and impact roads indicate that: 1) The correlation coefficient between the true road profile and the estimated one by the AKF is higher than 0.8799, with the RMSE value less than 3.1408 mm. It provides an accurate estimation of road roughness, serving as a reliable foundation for the shift register. 2) Compared to the traditional MPC and AKF, the WPMPC has optimized the RMS value of the sprung mass acceleration, dynamic deflection, and relative dynamic load of rear suspension by more than 3.68%, 6.91%, and 13.53%, respectively, due to the incorporation of the predictive road profile information within the wheelbase. This demonstrates that the proposed algorithm has enhanced both ride comfort and safety of the rear suspension system.
Future work would explore the wheelbase-preview predictive model under varying vehicle speed the real measured road profile, while also establishing appropriate weighting coefficients to enhance ride comfort.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by Research Project of State Key Laboratory of Intelligent Vehicle Safety Technology (NO. Q10-230592) and Chongqing Talents (NO. CSTB2024YCJH-KYXM0103).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.