
Abstract
Instantaneous rotating frequency extraction is one of the key technologies for mechanical health monitoring and fault diagnosis. As the instantaneous rotating frequency presents fast-varying property under high-speed fluctuation, this paper uses a coarse-to-fine strategy to propose a tacholess fast-varying instantaneous rotating frequency estimation model based on nonlinear short-time Fourier transform (NLSTFT) combination with adaptive chirp mode decomposition (ACMD). By self-adaptive matching and decomposing the vibration signal based on its time-frequency distribution, it increases the energy aggregation of time-frequency representation, which not only improves computational efficiency but also avoids the spectral ambiguity problem. As a result, the proposed model is very suitable for extracting instantaneous rotating frequency under severe speed fluctuation; simulation signal and rolling bearing fault vibration signal also validate this conclusion. Furthermore, by integrating with signal decomposition technology, various order components of fault vibration signal can also be self-adaptive extracted.
Keywords
Introduction
Rotating machinery often works under the variable speed and non-stationary load condition, and its vibration signal presents fast-varying instantaneous rotational frequency and phase function drastically. Besides, non-stationary working condition also leads the vibration signal to produce complex amplitude modulation and frequency modulation phenomenon, which brings difficulties to diagnose fault by using traditional diagnostic methods.1,2 Considering the instantaneous rotational frequency is not only an important characteristic parameter reflecting the operating state but also a necessary parameter to implement a series of fault diagnosis methods such as order tracking, time-varying filtering, and generalized demodulation analysis, and how to achieve accurate estimation of fast-varying instantaneous rotational frequency is significant for health assessment and early fault diagnosis under unsteady operating condition consequently.3–5
Traditionally precise measurement methods of instantaneous rotational frequency often employ speedometer combined with displacement sensors. In recent years, optical encoders have been widely used, and above technologies can generally meet current accuracy requirement. However, in many application fields, it is difficult to install these devices, thus failing to obtain accurate instantaneous rotating frequency, which poses challenges for assessing and diagnosing the healthy condition, as a result, it is necessary to precisely estimate instantaneous rotating frequency by solely processing and analyzing vibration signal in the absence of testing device. Robert Gao 5 combined narrowband phase demodulation and Hilbert transform technology to estimate the instantaneous rotating speed of gearbox equipment. Gryllias K, Gomez JL6,7 employed short-time scale transformation method to process vibration signal and further extracted fluctuating information of instantaneous rotational frequency. However, these aforementioned methods are limited to the case of finite rotational speed fluctuation. Addressing these shortcomings, Matthieu Kowalski and Gelman Len8,9 proposed an instantaneous rotating frequency estimation method based on harmonic signal decomposition, transforming the estimation method into an eigenvalue extraction issue. Yet, this method exhibits high sensitivity to background noise.
Time-frequency analysis methods offer a new approach for estimating instantaneous rotating frequency, such that short-time Fourier transform (STFT) combination with ridge line searching strategy has been widely applied on mechanical equipment monitoring and diagnostics.10–12 However, the effectiveness of STFT depends on the assumption of local stationary, which is not suitable for rapidly varying instantaneous rotating speed condition. Considering time-frequency reassignment methods involved in reprocessing time-frequency transformation and rearranging the distribution of time-frequency energy to enhance time-frequency localization, 13 it can be utilized to instantaneous rotating frequency estimation. On the other hand, traditional time-frequency reassignment methods lack reversibility and therefore cannot reconstruct signal in the time-domain. In contrast, synchronous transform methods rearrange signal’s time-frequency representation solely in the frequency direction, providing a reconstructive property.14,15 However, it neglects the signal’s time-frequency energy distribution in the time direction, thereby limiting its applicability on vibration signal possessing a slowly varying instantaneous rotating frequency.16–18 Recently, Chen 19 introduced a nonlinear frequency modulation mode decomposition method, by utilizing demodulation technology, this method transforms broadband nonlinear frequency modulated signal into narrowband signal. Combination with an optimization algorithm, a series of order components can be simultaneously extracted. However, there are still some issues that need to be addressed, such that the instantaneous frequency (IF) need to be required in advance for extracting corresponding order component, the ability to self-adaptive update bandwidth coefficients is missing. Therefore, the Adaptive Chirp Mode Decomposition (ACMD) method20,21 has been developed to address these challenges.
Based on aforementioned studies, in the high-speed fluctuation field, this paper utilizes a combination of nonlinear short-time Fourier transform (NLSTFT) and adaptive chirp mode decomposition (ACMD) to propose an instantaneous rotating frequency (IRF) estimation, and apply it to extract order components. In this proposed model, NSTFT provides a time-frequency spectrum of vibration signal, and ridge detection algorithm based on the spectrum presents an IRF information, thus minimizing human interference. Using the obtained initial IRF, ACMD constructs a matching IRF estimation operator according to the modulation property of vibration signal, given the highest energy attribute in time-frequency spectrum corresponding to IRF, and this approach enables a precise IRF estimation. After K iterations, ACMD decomposes a series of order components and their instantaneous amplitudes (IAs). Simulation and experimental validation demonstrate the effectiveness on estimating rapidly varying IRF, compared with other traditional methods, and it has a superior noise resistance performance. Finally, integrating signal decomposition technology, it further allows to extract a series of order components from fault vibration signal.
Theoretical foundation
Nonlinear short-time Fourier transform (NLSTFT)
NLSTFT serves as a fresh time - frequency analysis technique for handling non - stationary signals, considering mechanical fault vibration signal under large rotating speed fluctuation field presents fast-varying IRF, modulation property, it introduces a time-varying demodulation operator

Adaptive chirp mode decomposition (ACMD)
In general, the mechanical fault vibration signal under variable speed condition can be modeled into a multi amplitude-frequency modulation form. Therefore, the vibration signal

As for the signal




By analyzing formulas (4) and (5), when


In order to compute formula (8), this paper introduces an iterative algorithm to alternately update each intermediate variable. After a series of iterations, the IF corresponding to ith order component is updated as shown in formula (9), where

By extracting the ith order component

Ridge line detection
Unlike the original ACMD which uses the Hilbert transform to estimate the initial IF, in this paper, we will use the ridge detection algorithm combination with NLSTFT time-frequency distribution to implement the initial IF estimation of order components. The ridge detection algorithm can estimate the IF more accurately, which facilitates the order components extraction using ACMD. Scholars have conducted a lot of researches on ridge line detection method based on time-frequency distribution. Literature 24 estimates the IF by detecting the maximum value in time-frequency representation, which is susceptible to interference. Literature 25 can extract all the order components simultaneously by calculating the local maxima of a particular function, but the number of order components needs to be determined in advance. In real vibration signal, the number of order components is extremely difficult to determine due to the interference. In addition, ACMD does not need to provide the initial IFs of all order components, but only the IF information of a certain order component to be extracted. Therefore, in this paper, the ridge line detection method from literature 26 will be used, and it can estimate the IF information of order components that has the highest energy, which is coincident with ACMD.
Considering that the order component corresponding to IRF possesses the highest energy in NLSTFT time-frequency distribution; it can be well used for the coarse estimation of IRF, and the specific steps are shown as follows. 1. Detecting the location of maximum energy in the time-frequency distribution 2. Assuming 3. Calculating the IF at 4. Assuming the values are all zero at 5. Assuming
Repeating above step 3∼step5 until a series of order component are found.
From above analysis, it can be seen that the proposed method is very simple to implement, as it only requires the time-frequency representation of vibration signal and the maximum varying allowable frequency range. As a result, we use NLSTFT combination with ridge line detection method to achieve IF coarse estimation.
The proposed method
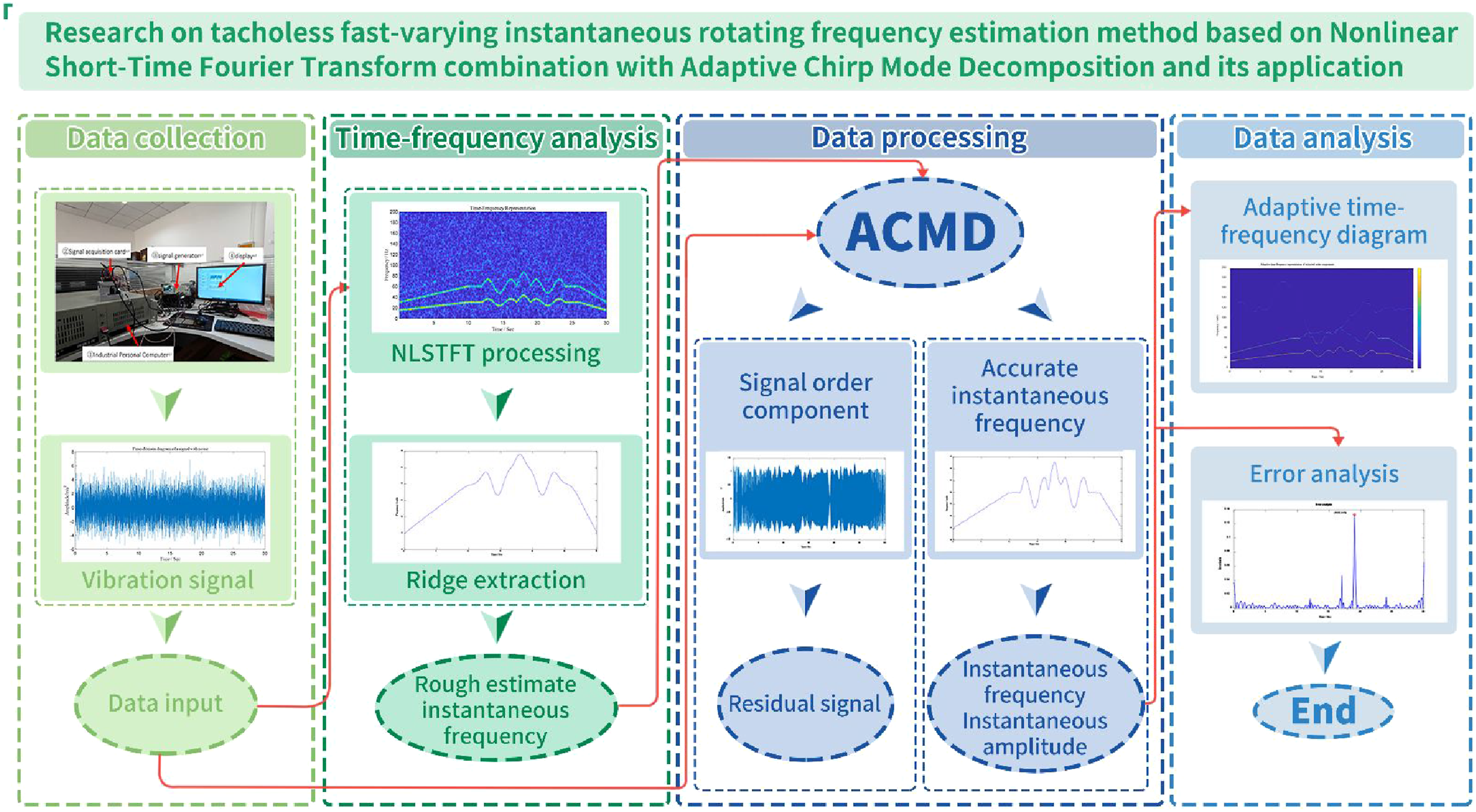
This paper adopts the “from coarse-to-fine” strategy to propose a tacholess fast-varying instantaneous frequency estimation method based on NLSTFT combination with ACMD and applies it to extract order components, the specific procedures are shown in Figure 1. A tacholess fast-varying instantaneous rotating frequency estimation flowchart based on NLSTFT combination with ACMD.
Simulation analysis
A rapidly varying simulation signal under speed fluctuation condition
Considering that mechanical equipment usually operates in a variable speed state, we have generated a fault vibration signal with rapid instantaneous speed changes, which includes linear variable speed state, speed fluctuation state, and large fluctuation speed fast changing turntable. This symbolizes that mechanical equipment operates in an extreme condition, and the simulation signal whose instantaneous angular frequency
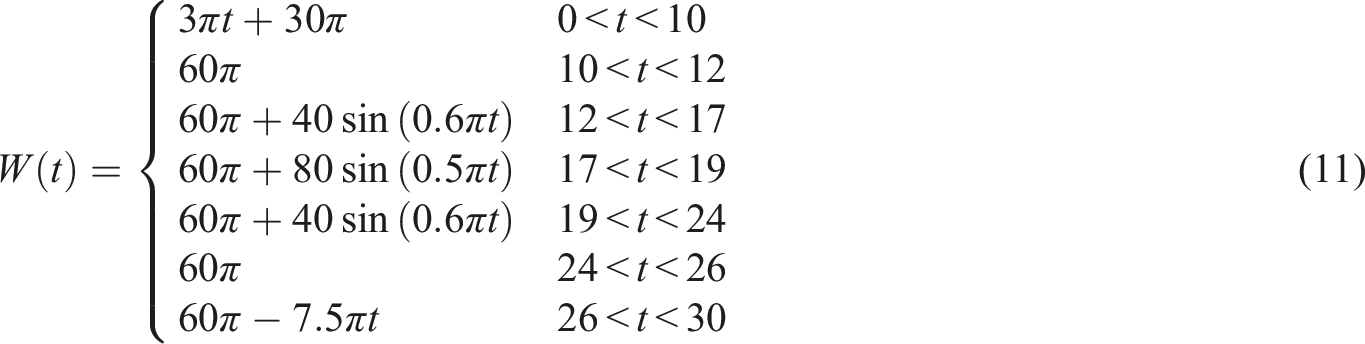
Furthermore, we take this IRF Time-domain of simulation signal (SNR = −5 dB).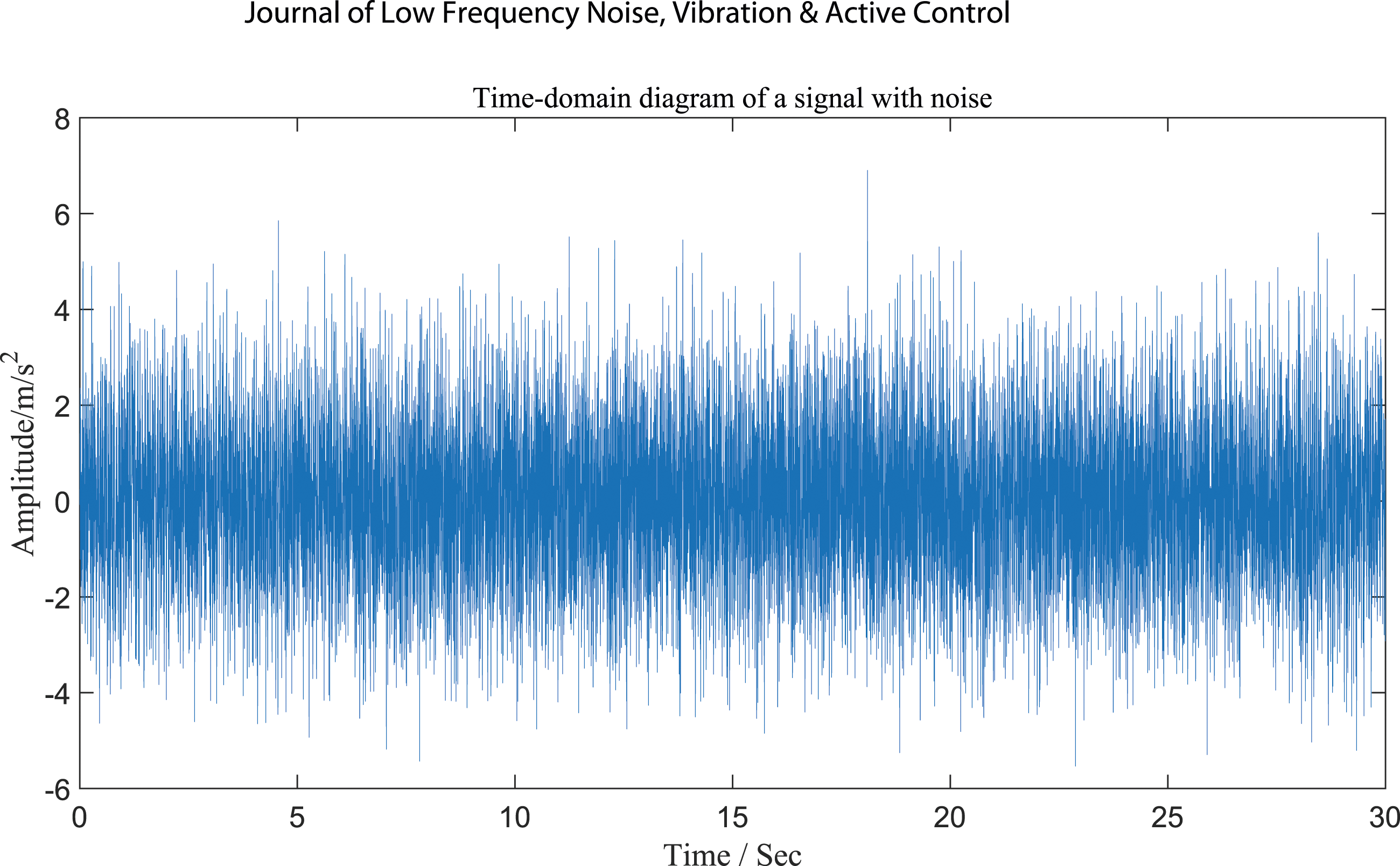

As shown above, firstly we obtain the signal’s time-frequency spectrum by using NLSTFT as shown in Figure 3(a). Here, the parameter in formula (1) Signal time-frequency diagram and comparison of rapidly varying instantaneous angular frequency estimation.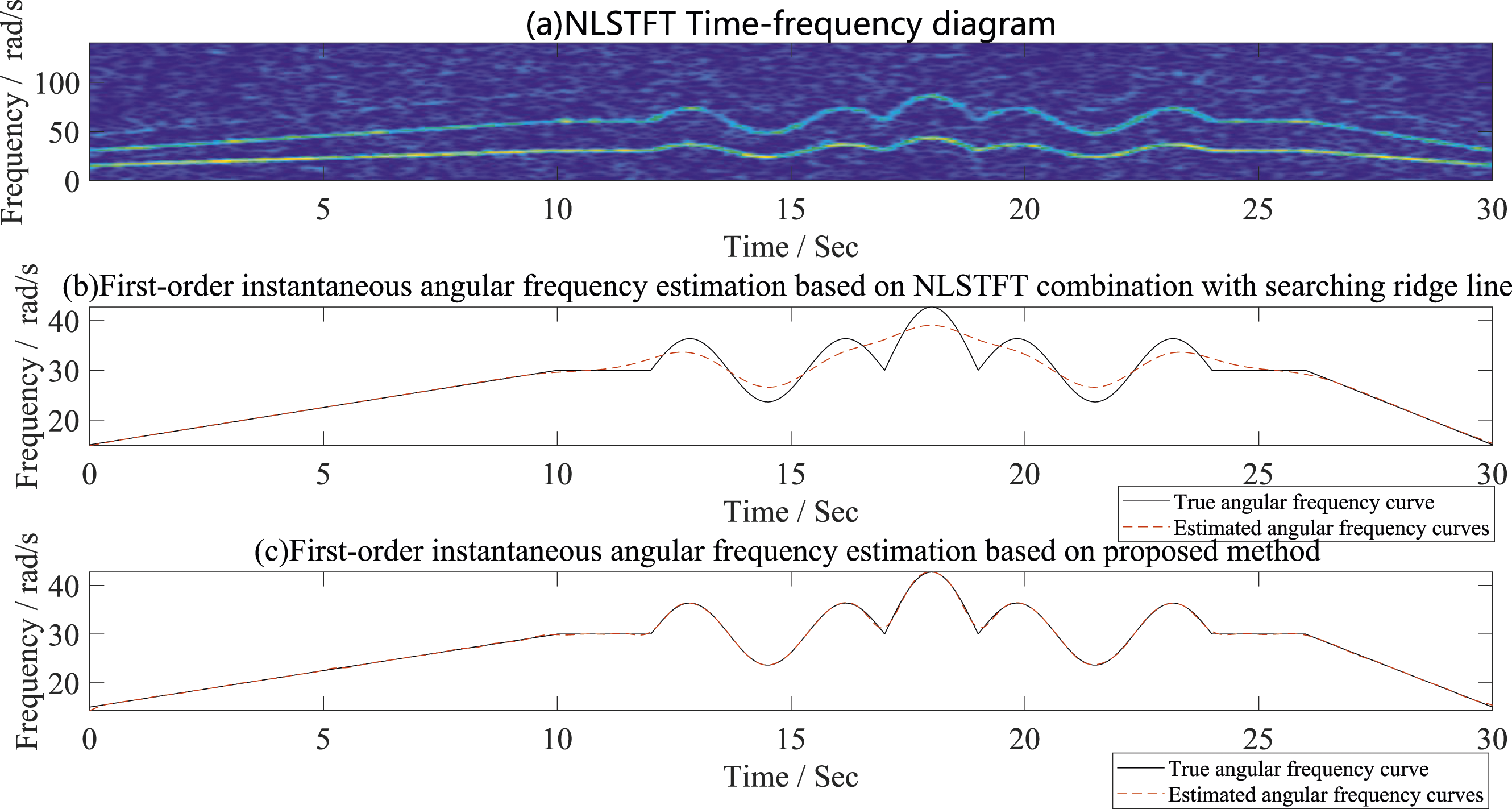


Comparison of error analysis.

When selecting parameters for NLSTFT and ACMD, careful consideration is essential to ensure the model’s performance and accuracy. In ACMD, alpha0 serves as the penalty parameter controlling the filter bandwidth. This parameter is typically selected through experimentation to achieve a balance where the bandwidth is sufficient for effective filtering without excessively smoothing the signal. Beta controls the penalty parameter for the smoothness of the IF increment during iterations, and it is also determined experimentally to ensure smoothness without over-smoothing. Tol represents the convergence criterion tolerance, commonly set at values such as 1 × 10−7, 1 × 10−8, or 1 × 10−9, with its impact on convergence speed and accuracy validated through experiments. For NLSTFT, hlength denotes the window function length, which is usually chosen to be between 1/4 and 1/10 of the signal length, with its impact on time-frequency representation tested experimentally. The parameter c represents the first derivative of the signal’s instantaneous frequency, chosen experimentally to optimize the modulation effect of the nonlinear short-time Fourier transform. Fs is the sampling frequency, selected based on the signal’s sampling rate to balance time and frequency resolution.
To ensure extraction effectiveness, the selection of Alpha0, Beta, and Tol parameters should be as small as possible. It is recommended to refer to the parameter settings in this study when processing other signals: Alpha0 = 1 × 10−6, Beta = 1 × 10−9, and Tol = 1 × 10−8. Initially, c is set to 0 and is updated iteratively, so it does not need to be set separately. For the selection of the hlength parameter, the method for selecting the window function length in short-time Fourier transform (STFT) can be referenced. The optimal value of the window function length can be between 1/4 and 1/10 of the signal length. Based on experience, 220 was chosen as the hlength setting in this paper. Through the careful selection of these parameters, the model’s effectiveness and accuracy can be ensured.
In summary, when the mechanical engineer works under a steady-state or linearly varying rotating speed, traditional model based on time-frequency analysis combined with ridge line detection can accurately extract the IRF. However, in extremely fluctuating rotating speed or rapidly varying rotating speed, the proposed approach in this paper, which employs a “coarse-to-fine” estimation strategy, yields more precise estimation result.
Experimental validation
Semi-physical simulation
In this section, we use the simulation signal generated by the dynamic signal processing system built in the laboratory for semi-physical verification. The experimental system consists of a dual-channel signal generator of Puyuan DG1032, a dynamic vibration signal acquisition card, and an industrial computer, as shown in Figure 4(a). A signal generator is used to generate a linear swept component (a) Semi-physical validation platform. (b) Time-domain of validation signal 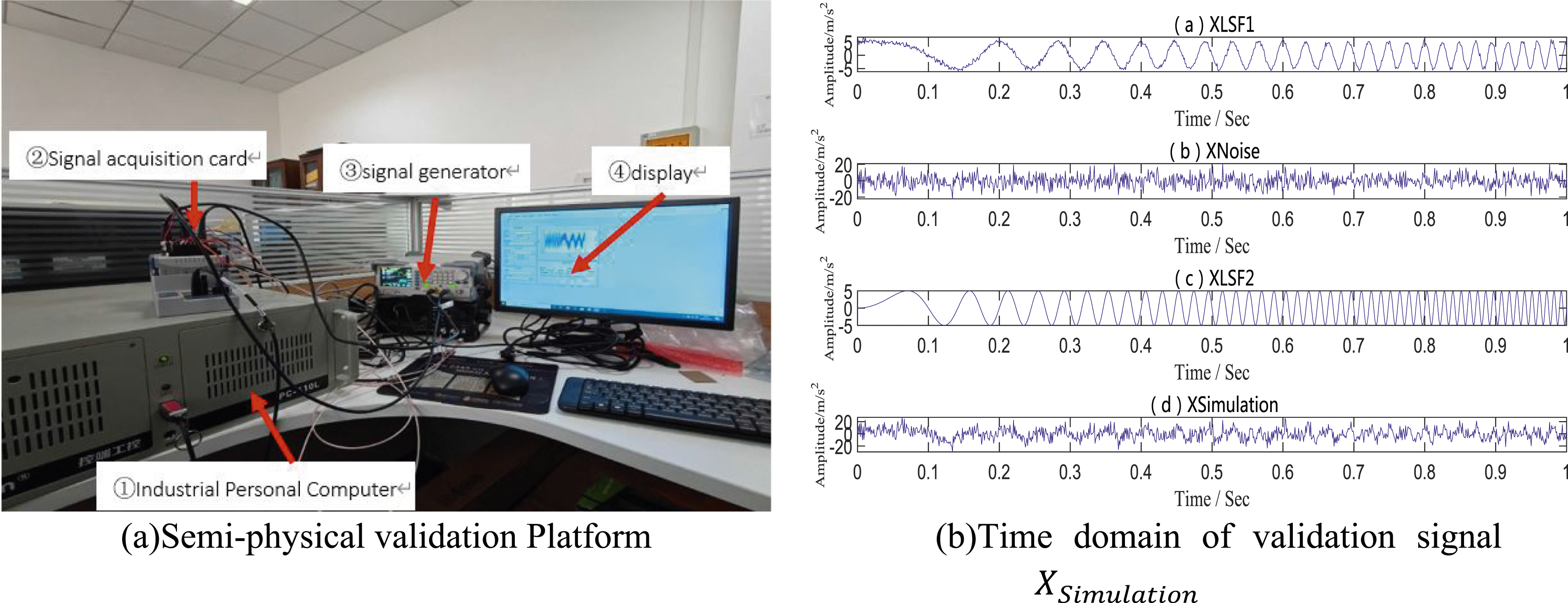
Finally, we use the proposed model to extract the IF corresponding to signal components Instantaneous frequency estimation and order component extraction corresponding to validation signal 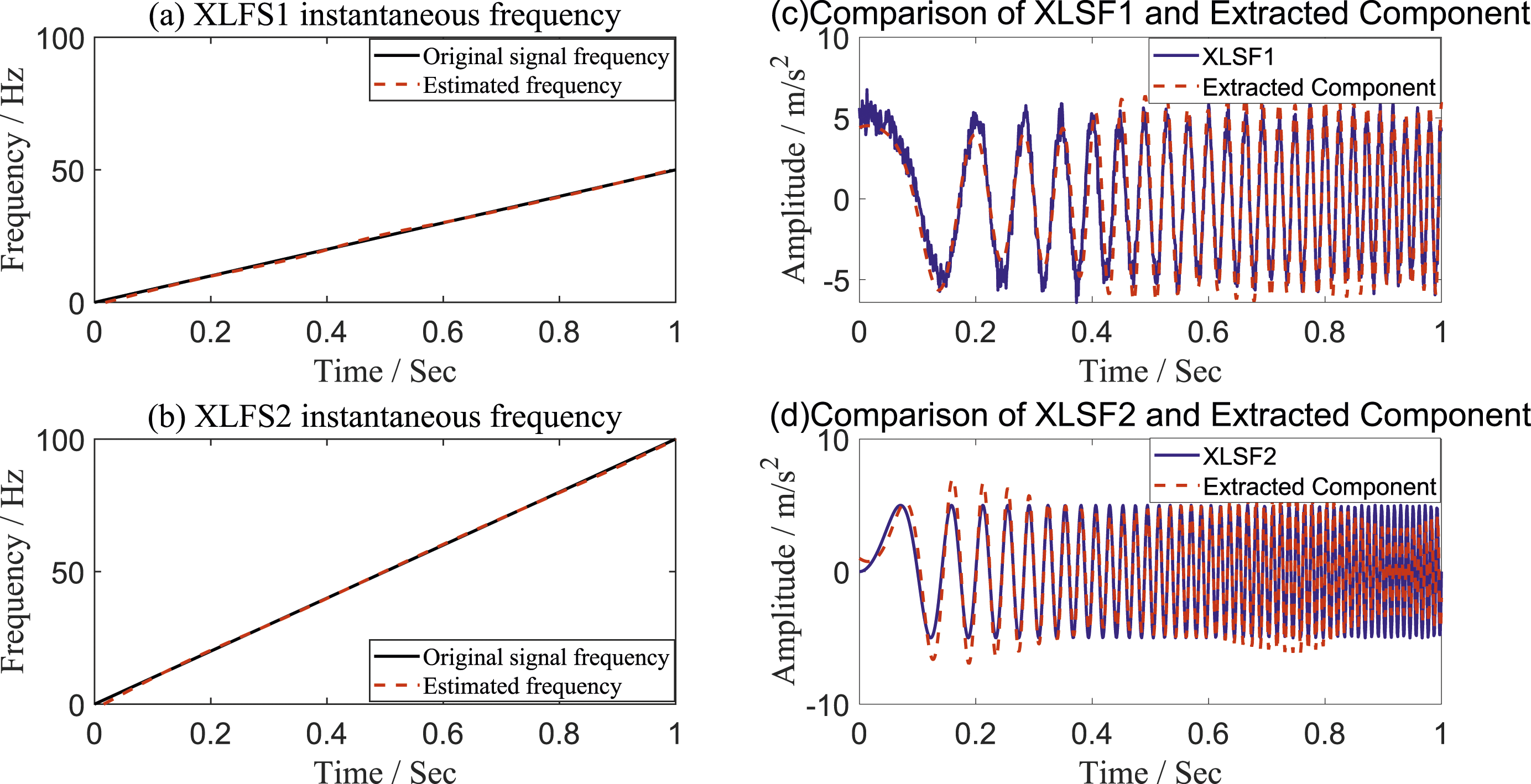
Using the two estimation IFs, the corresponding order components
When dealing with order components, as they often present numerous zero crossing phenomenona, directly calculating the average relative error may not accurately reflect the extraction performance. Therefore, we choose to use the mean squared error (

Comparison of accuracy analysis.

Rolling bearing fault vibration signal validation under varying speed condition
We use the rolling bearing vibration test signal under variable speed condition from Xi’an Jiao tong University, and the experiment uses the SQ (Spectra Quest) company’s mechanical failure comprehensive simulation test bench to simulate the motor bearing outer ring and inner ring failure. The structure of the test bench is shown in Figure 6; the test bench consists of motor, rotor, and load three major components. The experiment uses piezoelectric acceleration sensors to collect motor bearing vibration signal. The data acquisition instrument used is CoCo80, and the sampling frequency is 25.6 kHz. The style of motor bearing is NSK6203. Rolling bearing test bench under varying speed condition.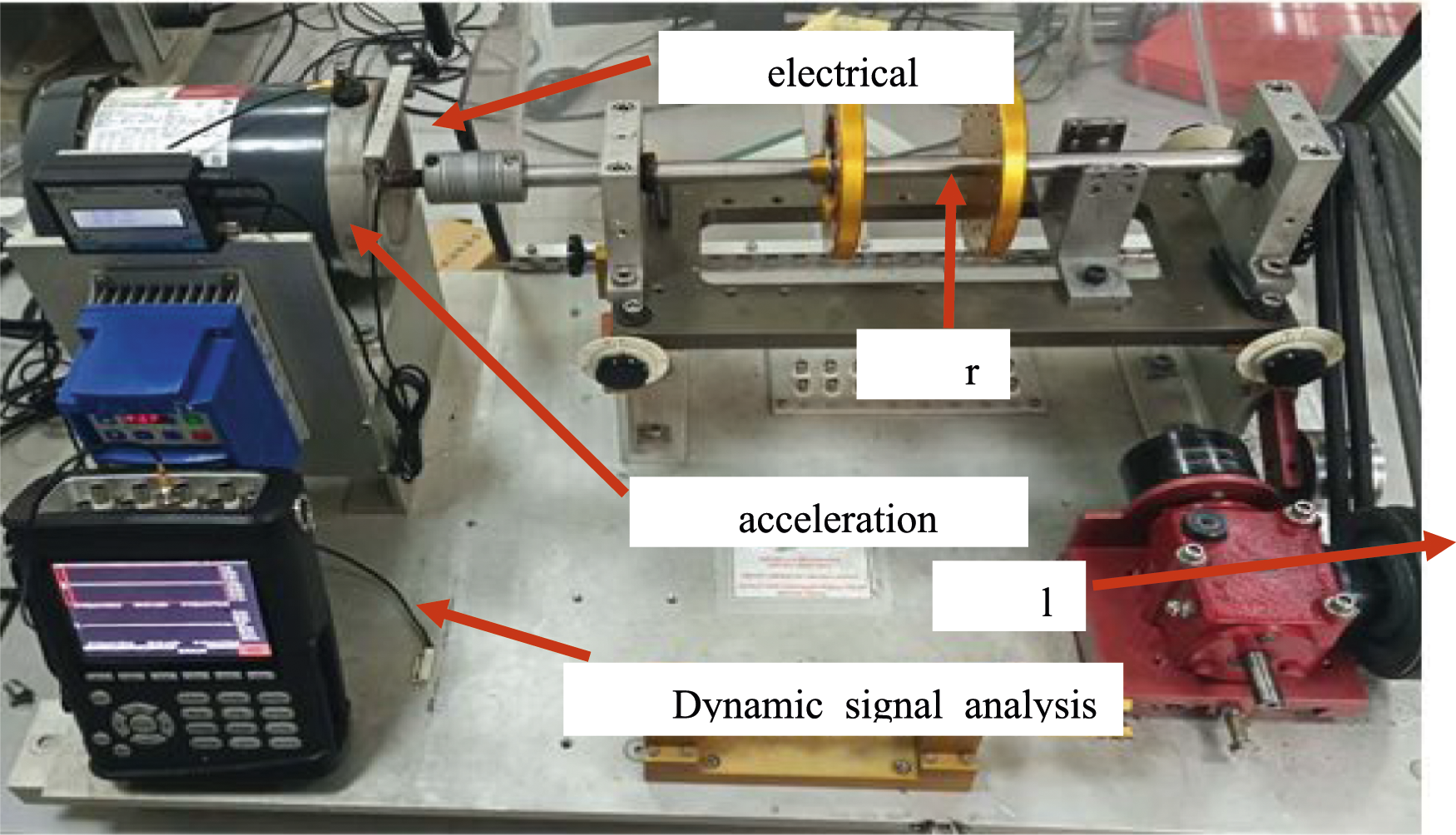
The “NC-REC3642-ch2.” is designated as experimental validation signal whose speed conforms to linear varying law, as original signal has a high sampling frequency and large number of sampling points, and it is a challenge for direct time-frequency analysis that will lead to a series of issues such as insufficient memory and a low computation efficiency. In order to address this problem, it is essential to down-sample experimental signal initially, with a down-sampling factor of 100. Finally, the corresponding rolling bearing fault vibration signal is depicted in Figure 7. Time-domain of motor rolling bearing vibration signal.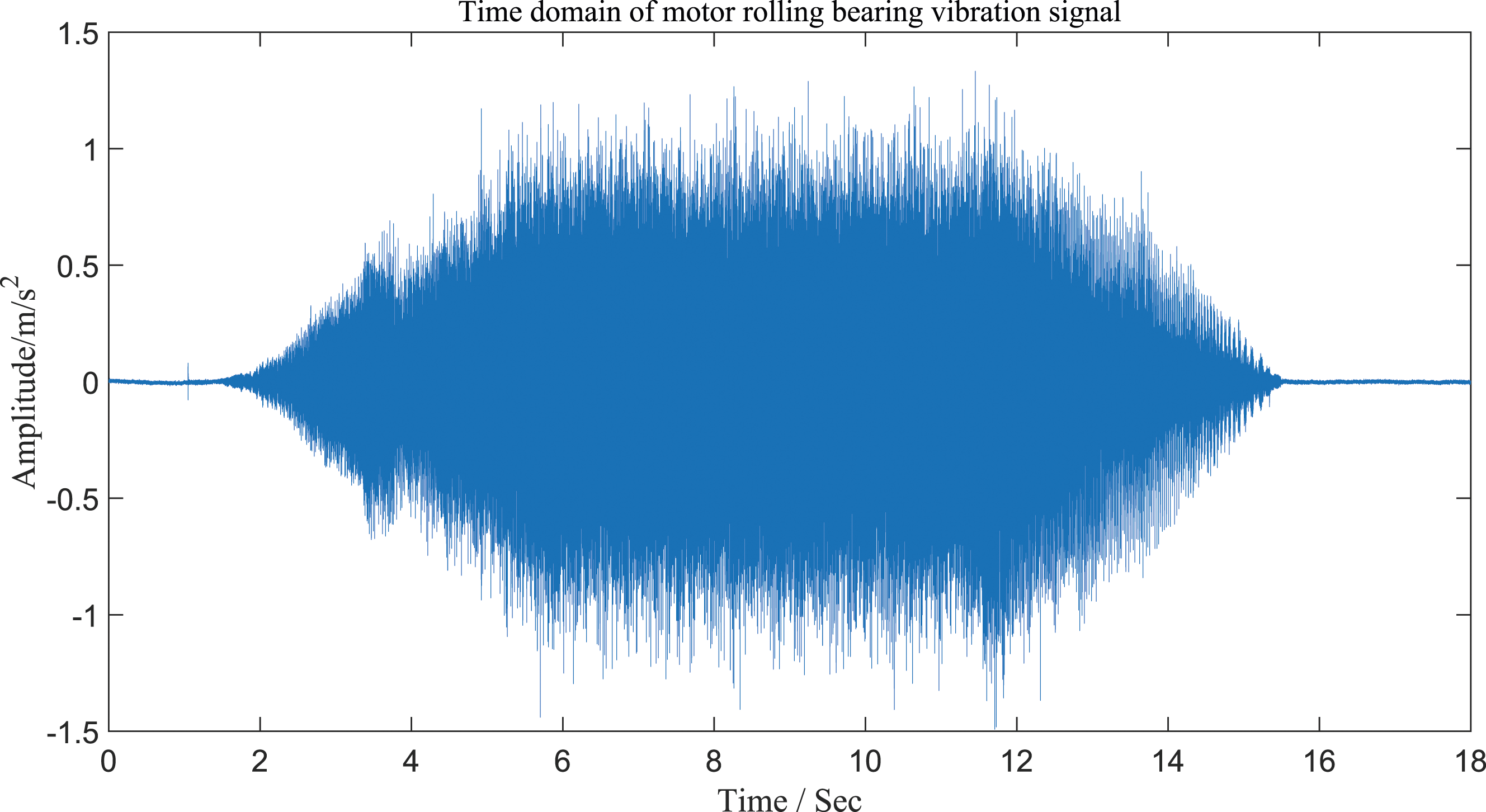
Furthermore, Figure 8(a) and (b) presents a comparison between two tacholess rotating frequency’s estimation results and estimation result based on phase-locked pulse signal. Obviously, it is evident that the estimation result by the proposed model successfully captures a complete acceleration and deceleration process. Specifically, it starts from a stationary state, gradually accelerates, maintains stability, and eventually decelerates. The original data indicates that the rotating speed remains stable state after accelerating to 3000 rpm, which corresponds to 50 Hz (3000/60 = 50 Hz). From Figure 8(b), it is apparent that during the time interval from 4 s to 12 s, the estimated rotating frequency aligns with the true rotating frequency and effectively reflects the actual rotating speed’s varying law. Considering the vibration signal undoubtedly contains noise, the estimation result presents some fluctuations in the beginning and end stages. Instantaneous frequency extraction results and a series of extracted order components and residual component.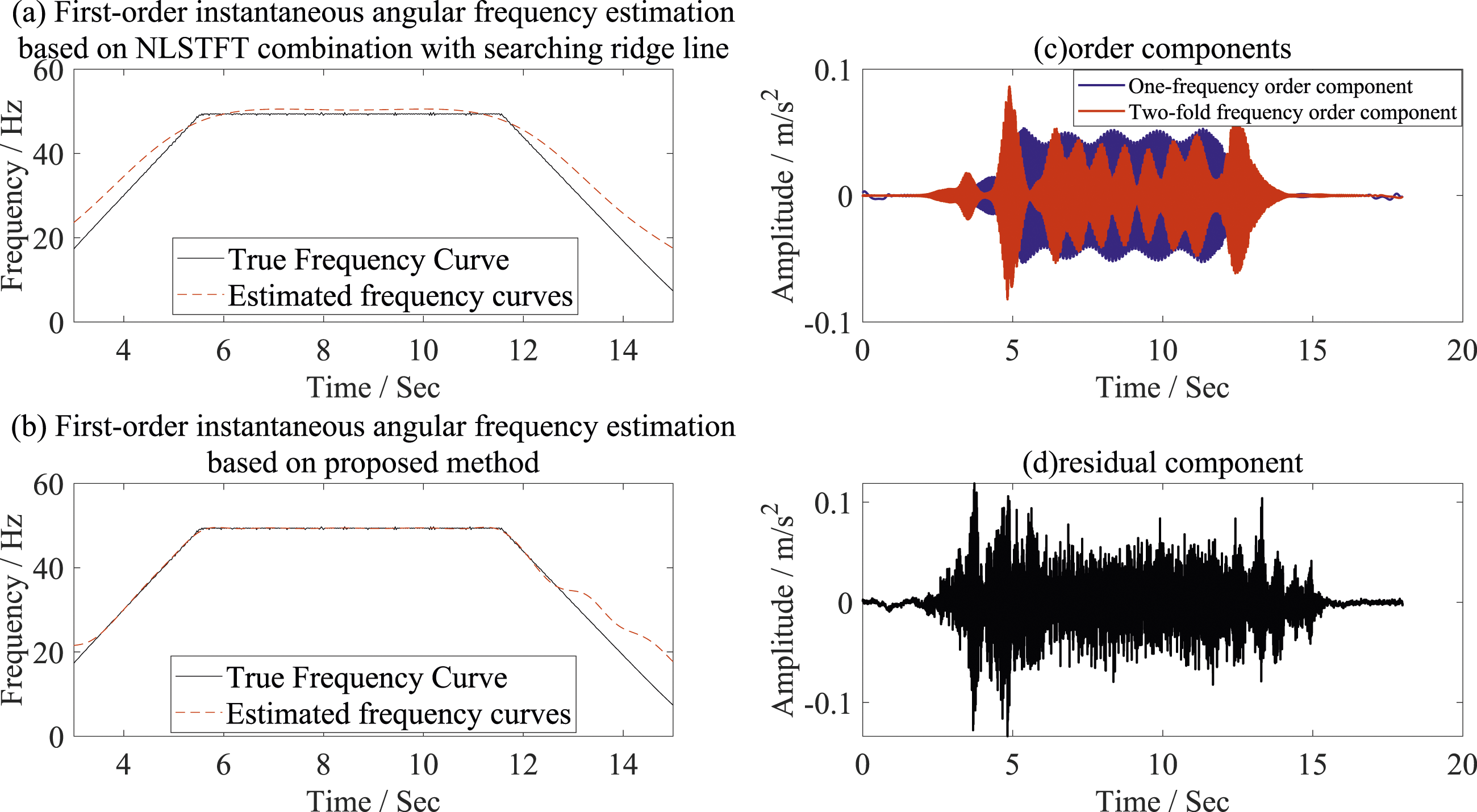
Finally, we sequentially estimated the remaining instantaneous frequencies and extracted corresponding order components, residual component, as shown in Figure 8(c) (d).
In conclusion, when we employ the proposed model to estimate IRF and extract a series of order components in the context of multi-component coupling fault diagnosis application, it not only yields an accurate estimation result but also facilitates the rapid and efficient identification. Consequently, the proposed method can be utilized where it is not possible to place an encoder to achieve rotating speed measurement.
Conclusion
(1) A tacholess fast instantaneous rotating frequency estimation model is proposed based on NSTFT combined with ACMD, adopting a “coarse-to-fine” strategy. Firstly, NSTFT constructs a fault vibration signal’s time-frequency spectrum, followed by ridge line detection to coarsely estimate the IRF with the highest energy. Furthermore, ACMD precisely estimates the IRF. This strategy effectively solves spectral ambiguity and provides accurate IRF estimation, confirmed by simulations and experiments, showing significant advantages over traditional methods for estimating fast-varying IRF. (2) Based on the estimated IRF combination with cyclic extraction strategy, a series of order components in vibration signal can be obtained sequentially. It solves the unavoidable problems of traditional methods caused by speed fluctuation, noise, amplitude and frequency modulation, and other irrelevant components, and can present an ideal time-frequency representation with high resolution, which has strong application value. However, when this model directly is applied on the low SNR condition, the extracted order components have amplitude distortion. Considering the Vold-Kalman filter has been widely employed to extract order components, and the proposed method has a high estimation accuracy on IRF, we suggest the proposed model combined with the Vold-Kalman filter can be used to improve the extraction accuracy of order components, effectively reducing the interference of noise on the signal and extracting more precise order components to address amplitude distortion issues. (3) In future, combining the proposed model with traditional demodulation models, we can provide a novel tacholess phase-amplitude demodulation technique, which can be used to diagnose fault under variable working condition. In addition, considering the use of NLSTFT to process big data, there is still a high degree of spectral ambiguity in the time-frequency representation, and in order to improve the energy concentration of time-frequency representation, higher precision time-frequency distribution such as Synchronous Compression Transform (SST) can be attempted. Finally, a novel order component extraction model can also be constructed by combining key phase instantaneous rotating frequency estimation with ACMD. (4) In mechanical systems, certain critical components cannot accommodate traditional speed sensors due to space limitations or other reasons. MEMS (Micro-Electro-Mechanical Systems) sensors, such as accelerometers and gyroscopes, can fill this gap. In the future, the method proposed in this paper can be combined with MEMS technology to further enhance the fault diagnosis capabilities of mechanical systems. By integrating MEMS sensors into mechanical systems, we can achieve continuous condition monitoring and obtain real-time vibration and displacement data of critical components, thereby improving the accuracy of fault diagnosis.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is supported by National Natural Science Foundation of China (Number: 62303300) and Shang Hai Professional Technical Service Platform Project (Number: 23DZ22905000).