
Abstract
Sever damages or even total collapses were recorded due to collisions between insufficiently separated neighboring structures exposed to seismic forces. This research article aims to examine the effectiveness of Tuned Mass Damper-Inerter (TMDI) systems in mitigating seismic pounding between insufficiently separated buildings subjected to earthquakes of varying frequencies as low, medium, and high. The effectiveness of TMDI is examined for pounding mitigation of neighboring buildings through different scenarios, involving uncontrolled adjacent buildings, attaching one building with a TMDI system, and both of the adjacent buildings are controlled by TDMI. The governing equations of motion for the considered scenarios of adjacent buildings modelled as single-degree-of-freedom (SDOF) systems to seismic force are formulated. The nonlinear viscoelastic model is incorporated to simulate the generated forces during collisions under earthquake motions scaled to have the same peak ground acceleration (PGA) level. The TMDI’s optimal design parameters are determined by solving a constrained optimization problem employing an evolutionary algorithm to minimize the displacement response. The obtained numerical results clearly indicate that, TMDI is an effective mechanism in controlling the induced displacements and mitigating the pounding forces between insufficiently separated buildings subjected to earthquake motions of different frequency contents. Further, TMDI is substantially effective in minimizing the Interaction when both buildings are equipped with the system. In addition, the frequency content of the applied earthquake records is an important parameter in dictating the response reduction.
Keywords
Introduction
Seismic pounding refers to the collision between structures during earthquake motions. The pounding phenomenon primarily occurs between structures of different dynamic characteristics and inadequate spacing in between. Induced pounding forces may result in large scale damage between neighboring buildings. Moreover, induced forces due to collisions generate an abrupt acceleration pulse that could potentially have an adverse effect on the whole structures. 1 In addition to the in between separation gap and dynamic properties of the adjacent structures, the characteristics of the applied earthquakes and the geometry of the structures influence the occurrence and severity of interaction between adjacent structures. 2 Numerous performed research studies indicated that the response of neighboring structures may be significantly influenced by the interaction between the structures, leading to extensive increase in the induced acceleration responses and even collapse in some cases.3,4
Several methodologies have been developed and presented for modeling impact and evaluating structural behavior. 5 In order to avoid the effects of pounding between adjacent structures, sufficient separation gap needs to be provided to allow movements of structures without interactions. However, the real distance is highly uncertain particularly in metropolitan areas where buildings are built close to each other due to economic reasons in terms of cost and land availability. Therefore, the mitigation of seismic pounding is a significant issue in the field of structural engineering. Various strategies for mitigating the likelihood collisions between neighboring structures have been suggested in several research works. These techniques include the use of springs and viscous/viscoelastic dashpots to connect nearby buildings.6–8 The use of friction dampers and viscous fluid dampers have also been proposed to reduce the potential of pounding. 9 Structural control is one of the effective techniques for controlling structure’s reaction through altering the stiffness, mass, or damping of the neighboring structures. This technique can be accomplished by utilizing devices and algorithms 10 that can be classified into four categories in terms of: active control, 11 passive control,12,13 semiactive control, 14 and hybrid control. 15 Active devices rely on the supply of significant amounts of energy to the structural system to achieve their desired behavior. On the other hand, passive devices induce inertial forces within the structure that lead to a reduction in the structural response through energy dissipation mechanisms. It is worth to note that, passive devices do not require external power sources. Semiactive and hybrid devices are considered as intermediate solutions that include the properties of both active and passive devices, while also having low energy usage.
Passive control devices, particularly tuned mass dampers (TMDs), are notable among structural control options due to their simplicity, reliability, cost-effectiveness, and durability. The efficiency of these mechanisms, which consist of a mass, a spring, and a damper, has been demonstrated in reducing damage and preventing collapse in structural systems. 16 These mechanisms are specifically tuned to the fundamental frequencies of the structure, making them ideal for safeguarding the structural integrity of a building. TMD has been extensively applied in various fields, including base isolation, 17 seismic protection of buildings, 18 and soil-structure interaction.19–21 TMDs are categorized into conventional TMDs, pendulum TMDs (PTMDs), bidirectional TMDs (BTMDs), and liquid column tuned dampers (TLCDs) based on their functioning mechanism. 22 TMD can effectively reduce dynamic vibrations and collisions between adjacent buildings.23–25 However, some performed studies indicated that it was relatively an ineffective strategy. 26
To enhance the performance of these devices, many researchers have dedicated their efforts over the past years to a promising modification of conventional TMD. This modification involves the incorporation of a two-node linear device, known as an inerter, which generates an internal resisting force that is directly proportional to the relative acceleration between the two nodes. Marian and Giaralis 27 introduced the TMDI, which is a novel device that combines the standard TMD with an inerter. The inerter is a device with negligible mass that produces an equal mass amplification effect known as inertance. In this mechanism, the inertance is introduced as a connection between the TMD and the floor directly beneath it. The inerter’s substantial simulated kinetic mass is utilized to improve the performance of the conventional TMD while also decreasing its weight. Later, TMDI configurations and mathematical models were formed. Multiple studies have investigated the design, 28 optimization, 29 and performance of this novel passive control device, providing positive outcomes. 30 These findings demonstrate that these mechanisms may exceed the standard TMD in terms of effectiveness when attached to structures subjected to seismic loads. 31 Similarly, devices that utilize inerter technology have been employed in various applications across several domains of civil engineering.
The precise configuration of TMDI systems, like TMDs, relies on identifying the ideal tuning parameters that yield the highest level of system performance. 32 R. S. Jangid33,34 presents a numerical optimization technique to determine the optimal parameters for a tuned mass damper inerter (TMDI) in SDOF and MDOF structures subjected to earthquake excitation. Multiple authors have made contributions in this field. Marian and Giaralis 27 employed three distinct approaches to reduce the relative displacement variance of the lead mass in stochastically support-excited structural systems. These methodologies were applied to a primary structure equipped with a linear TMD, where the mass of the TMD was connected to the ground through an inerter. De Domenico et al. 29 and Palacios-Quinonero 35 have also examined the viability of using TMDIs as an alternative for reducing the seismic pounding of adjacent low-rise and high-rise buildings.
The effectiveness of TMDI in mitigating the seismic response of two MDOF neighboring buildings and the distance at which they collide have been examined.36,37
A review of the above-cited few papers indicates that the conducted analyses have only concerned collisions between uncontrolled buildings. Moreover, relatively simple linear pounding force models have been adopted to simulate impacts between adjacent structures. The novelty of the present work is to exhaustively examine the coupled effect of both Tuned Mass Damper Inerter (TMDI) systems and pounding phenomena on the nonlinear response of adjacent buildings with different dynamic properties under varying frequencies of earthquakes, which constitutes a significant ground motion characteristic. This research aims to investigate the efficacy of the TMDI in enhancing the performance of optimally controlled adjacent buildings subjected to ground motion records with low, medium, and high frequencies. An optimization process employing a genetic algorithm (GA) to optimize a strategic objective function focusing on minimizing the maximum displacement of structure to achieve an optimal TMDI. This process involves determining the critical damping, ζTMDI, and frequency, υTMDI, ratios of the damper, leading to lowest structural response. Three different scenarios are compared to illustrate the distinct characteristics and advantages of the suggested structural control strategy in mitigating pounding between adjacent structures.
The paper is structured in the following approach: Ground motion records provides the ground motion records utilized in the study. Mathematical Modelling outlines the derivation of the generalized nonlinear equations of motion of the considered SDOF models for single and adjacent structures. The optimization process used to determine the optimal values for the design parameters of the TMDI system is introduced in Optimal TMDI parameters. The numerical results and the detailed discussions are provided in Numerical Simulations. Finally, Conclusions summarizes the main conclusions of the performed research work.
Ground motion records
Ground motion records input to the different configuration models.
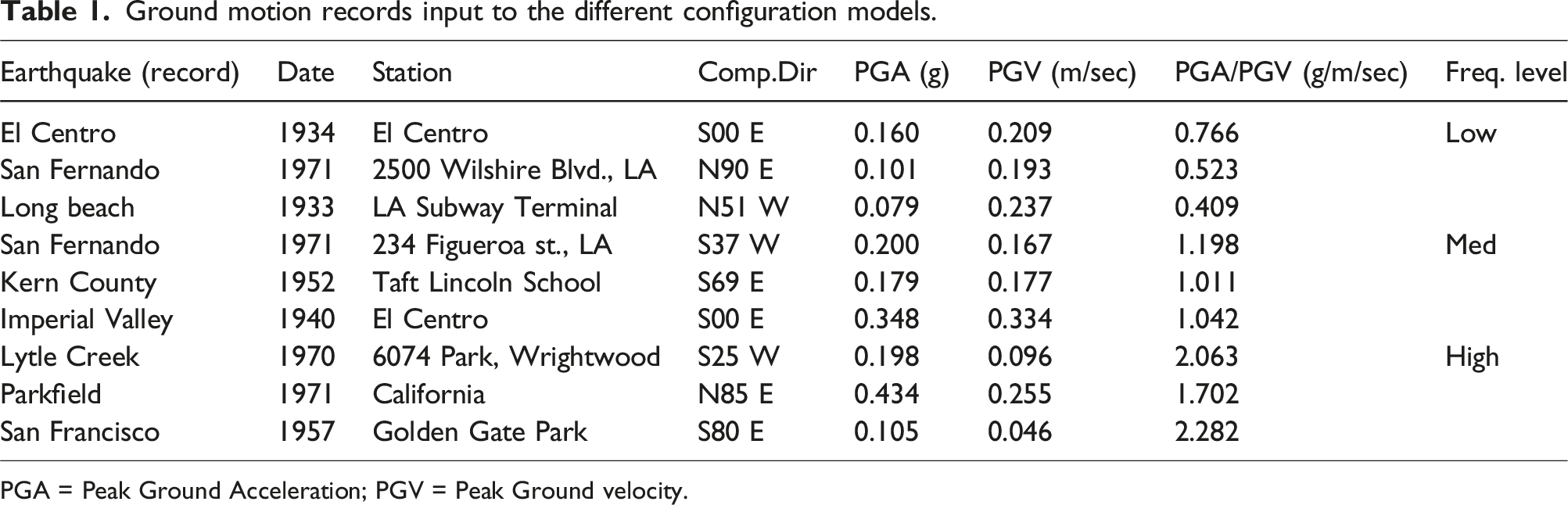
PGA = Peak Ground Acceleration; PGV = Peak Ground velocity.
Mathematical modelling
In this section, simplified models for a single-storey building and adjacent buildings with single-storey are presented. Different scenarios are considered for the adjacent buildings in which one building or both buildings are equipped with a TMDI to examine the efficiency of the attached TMDI in controlling the displacement response and mitigating collisions between buildings. The mathematical derivations of the equations of motion of the simplified building models subjected to seismic loads are also introduced.
Single building model
A schematic representation of the structural framework is presented in Figure 1. The main structure of the system is a linear damped SDOF dynamical system that comprises a mass m, a spring with stiffness k, and a viscous damper with damping coefficient c. The system is excited horizontally by a ground acceleration Idealized SDOF building model equipped with a TMDI.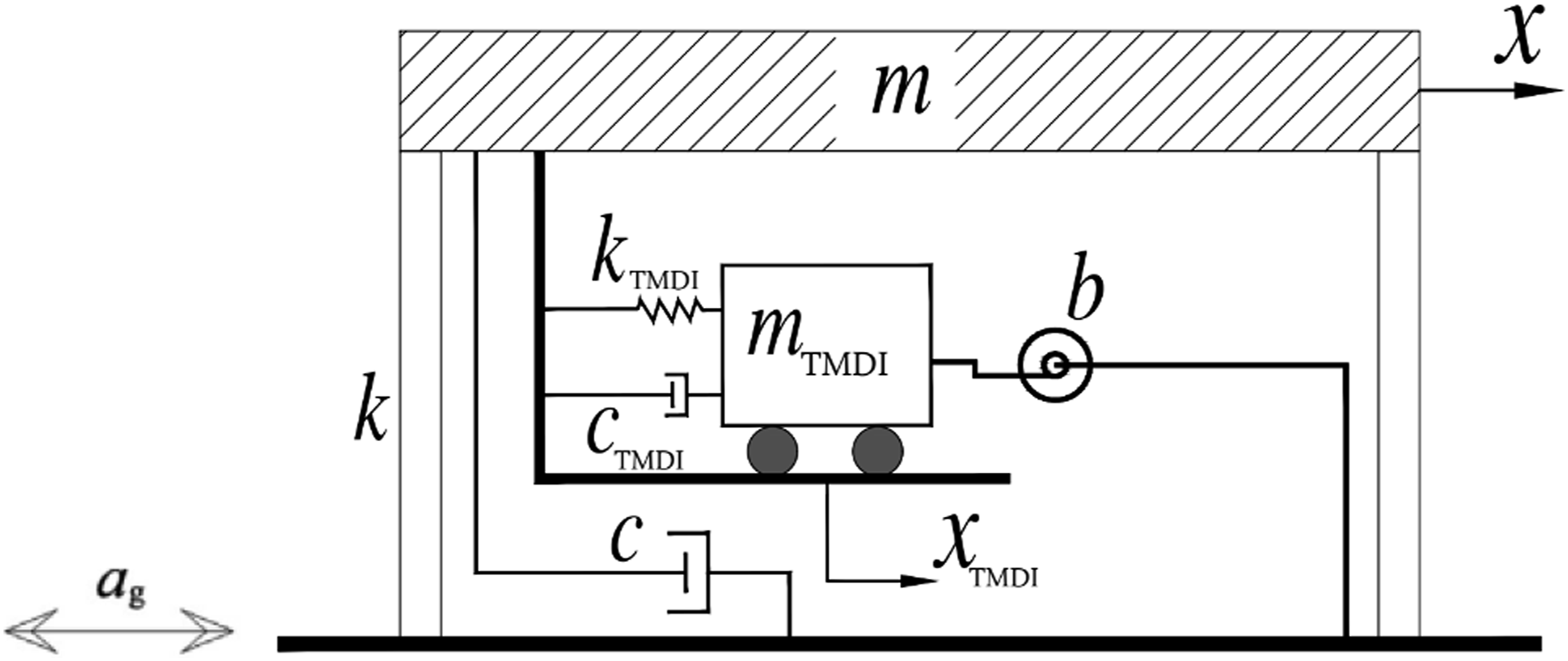
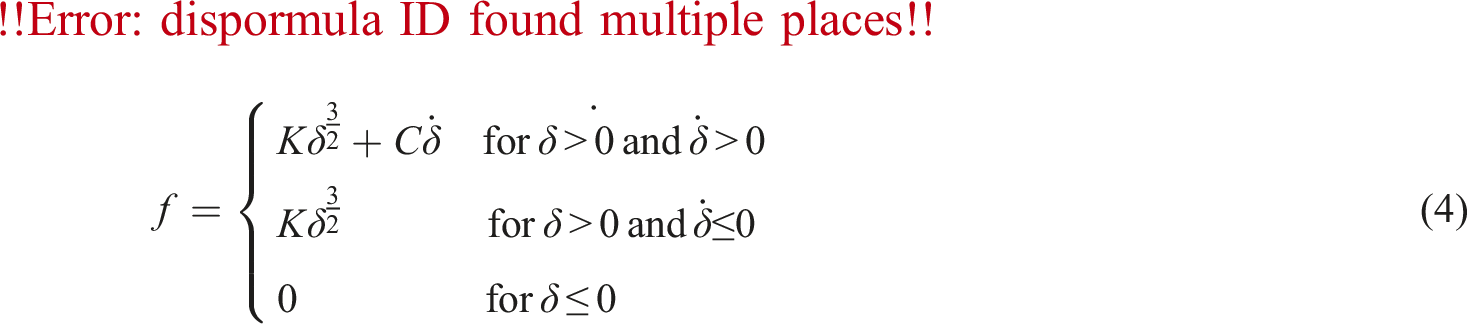
The main role of the inerter is to provide an inertial force, F, to the primary structure. The force, F, is mainly dependent on the relative acceleration of the inerter terminals and inertance, 
Structures exhibit a nonlinear behaviour when exposed to unexpected high loads, such as seismic loads, causing the dynamic response of the structural system to move towards the inelastic range. Consequently, the utilization of nonlinear analysis offers a more effective method for evaluating the real responses. The SDOF building model is commonly considered to be elastic-perfectly plastic with an elastic unloading stage, as can be seen in Figure 2. The relationship between the resistance, r(t), of the SDOF system and its lateral displacement, u, can be categorized into distinct phases. In the elastic phase, the resistance force is directly proportion to the stiffness, Idealized elastic-perfectly plastic curve.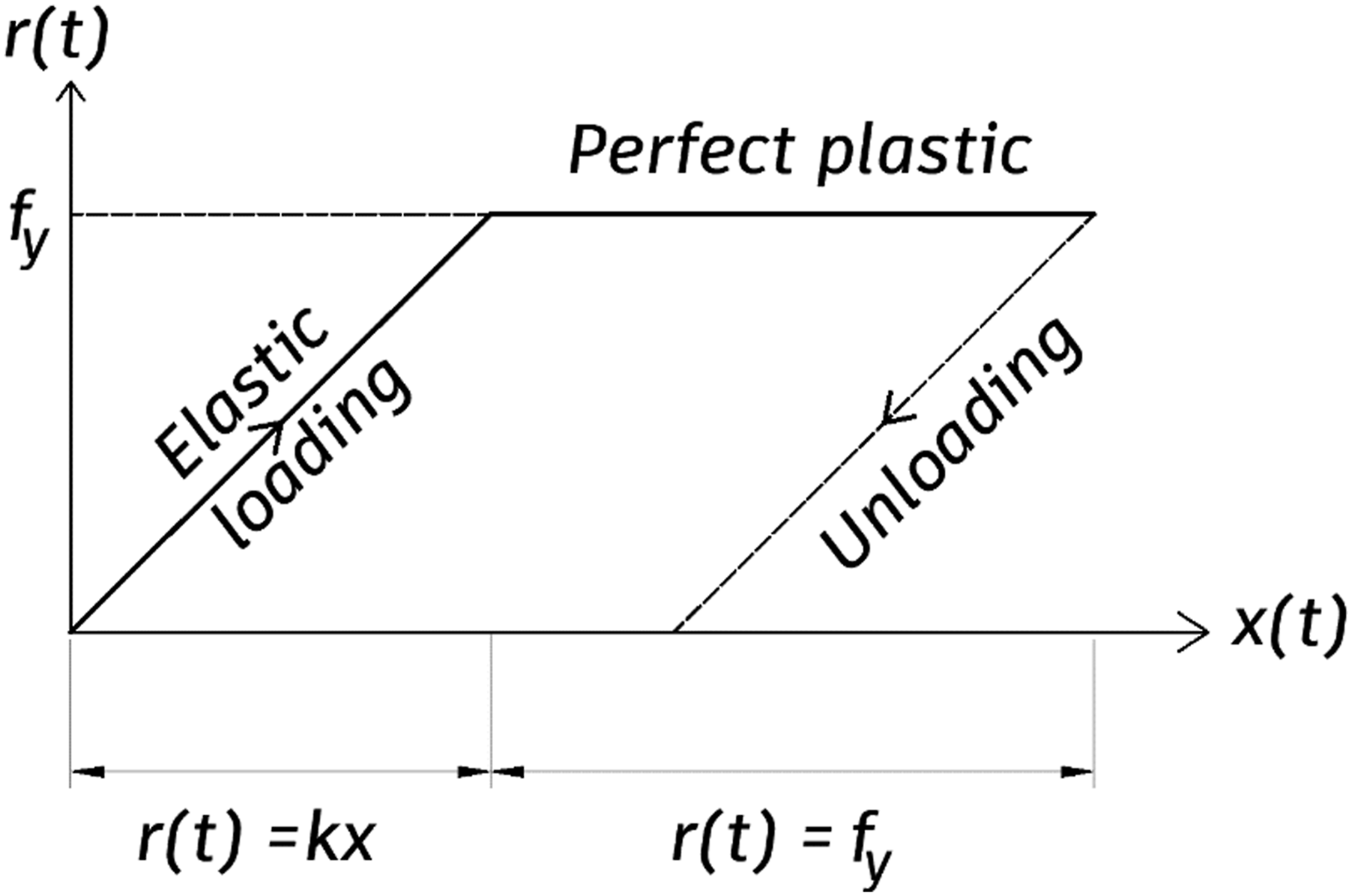
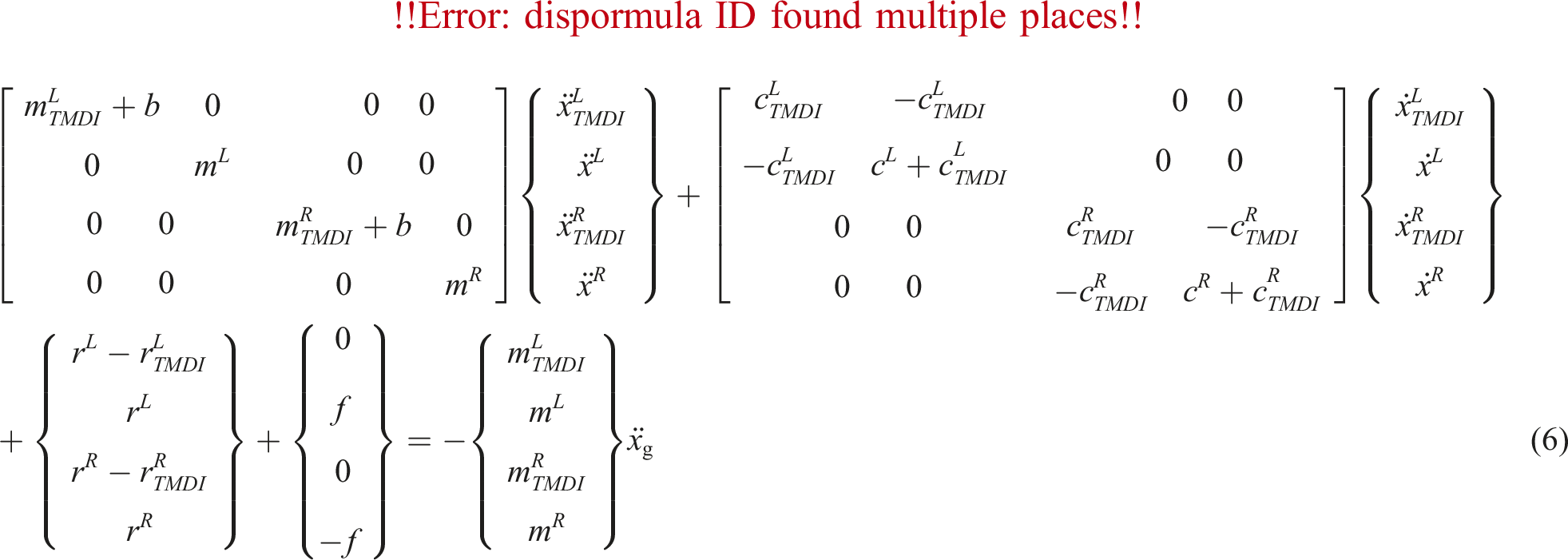
The governing equation of motion of the system in the matrix vector form can take the form:
Adjacent buildings models
This section introduces the formulations needed to model the adjacent single-storey buildings considering pounding. In order to test the efficiency of TMDI as a control strategy in mitigating pounding between adjacent buildings, three different configurations are proposed as can be seen in Figure 3. In the first scenario, see Figure 3(a), the neighboring buildings are modelled without attaching a TMDI the buildings. The equation of motion for this configuration can be expressed as: Idealized adjacent building models for the considered different scenarios for (a) uncontrolled buildings, (b) one controlled building, and (c) two controlled buildings.
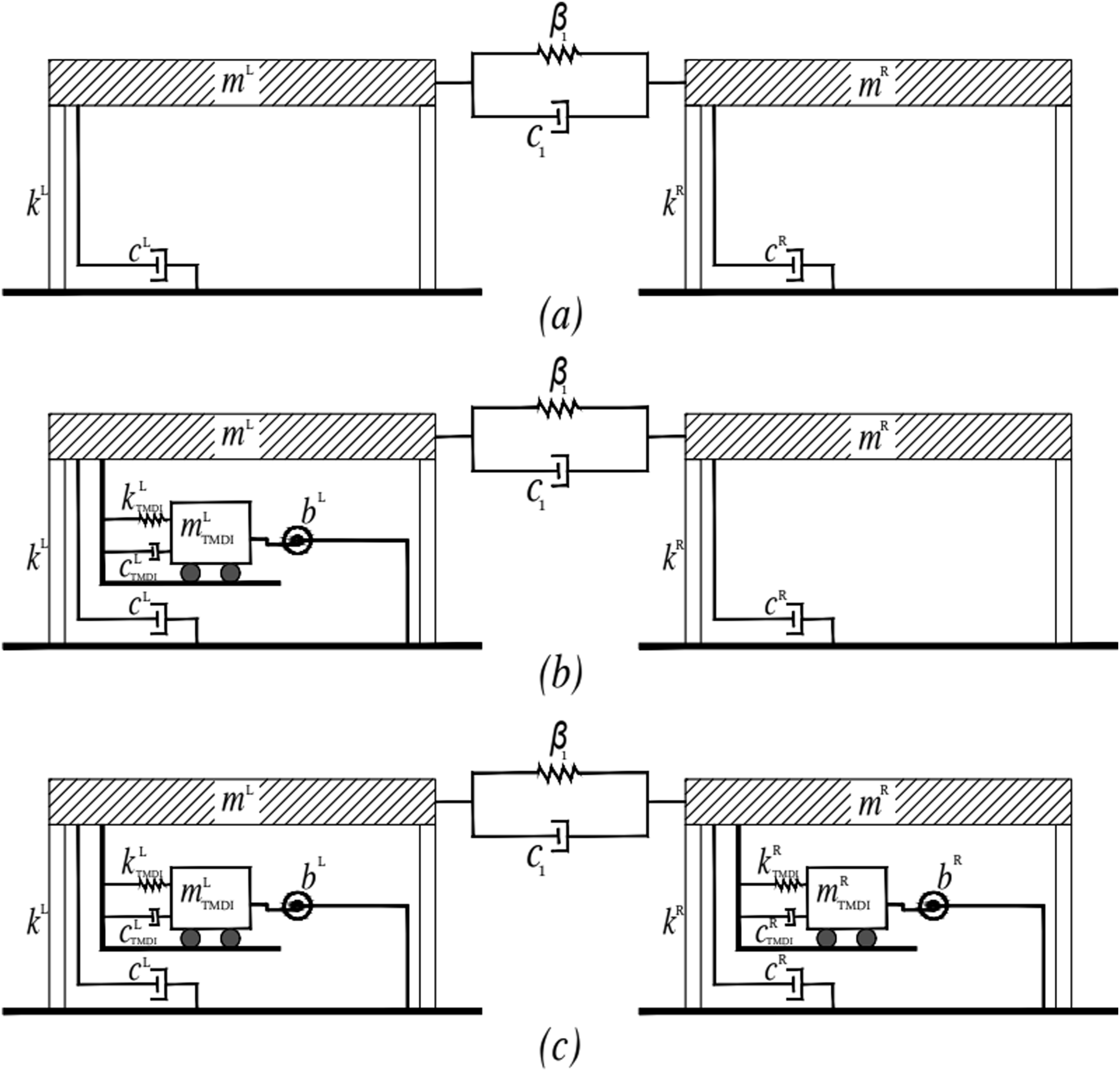
The second scenario considers one of the neighboring buildings equipped with a TMDI, see Figure 3(b). The developed equation of motion for this scenario is similar to the one for the first scenario. However, the dimensions of the matrices due to the inclusion of the TMDI to the left building will be changed.
Optimal TMDI parameters
Once formulating the dynamic equations of motion for the proposed building models subjected to seismic loads, the ideal values for the design parameters of the TMDI system become possible to be determined. The tuning technique, in which a GA is implemented to optimize a strategic objective function, is conducted. The optimized function is focusing on minimizing the peak displacement of the excited structure. For achieving such a purpose, the frequency, and the damping ratios of the attached TMDI devices to the modelled buildings need to be adjusted. The problem at hand involves optimizing four independent design parameters simultaneously. These parameters are dimensionless and can be represented by the vector, g1 = [υ ξ] T , that includes two of the parameters in terms of the frequency and the combined damping ratios of the TMDI. The other two parameters, namely, the ratios of mass and inertance are represented by the vector, g2 = [μ β] T .
The GA approach is applicable to a wide range of optimization issues that are not well-suited for conventional optimization approaches. These concerns may involve objective functions that exhibit stochastic behavior, lack differentiability, contain discontinuities, or display significant levels of nonlinearity. Recently, there has been a rise in the use of genetic algorithms in civil engineering difficulties. This is mainly due to their inherent aptitude, adaptability, and effectiveness. MATLAB’s GA is utilized to solve the optimization problem numerically in order to identify the optimal design parameters in g1 that are constrained to the predetermined search range [g1 min, g1
max
] for various provided values of the parameters in g2. So, the subsequent numerical work is focusing on determining the optimal υ and 

The following is a consideration of the range of preselected values while using MATLAB’s vector notation: μ = [0.03: 0.05: 0.07: 0.1], and β = [0: 0.25: 0.5: 0.75]. A scheme describing the approach suggested in this study for the determination of the optimal TMDI device design parameters is depicted in Figure 4. The approach suggested in this study for the determination of the optimal TMDI device design parameters.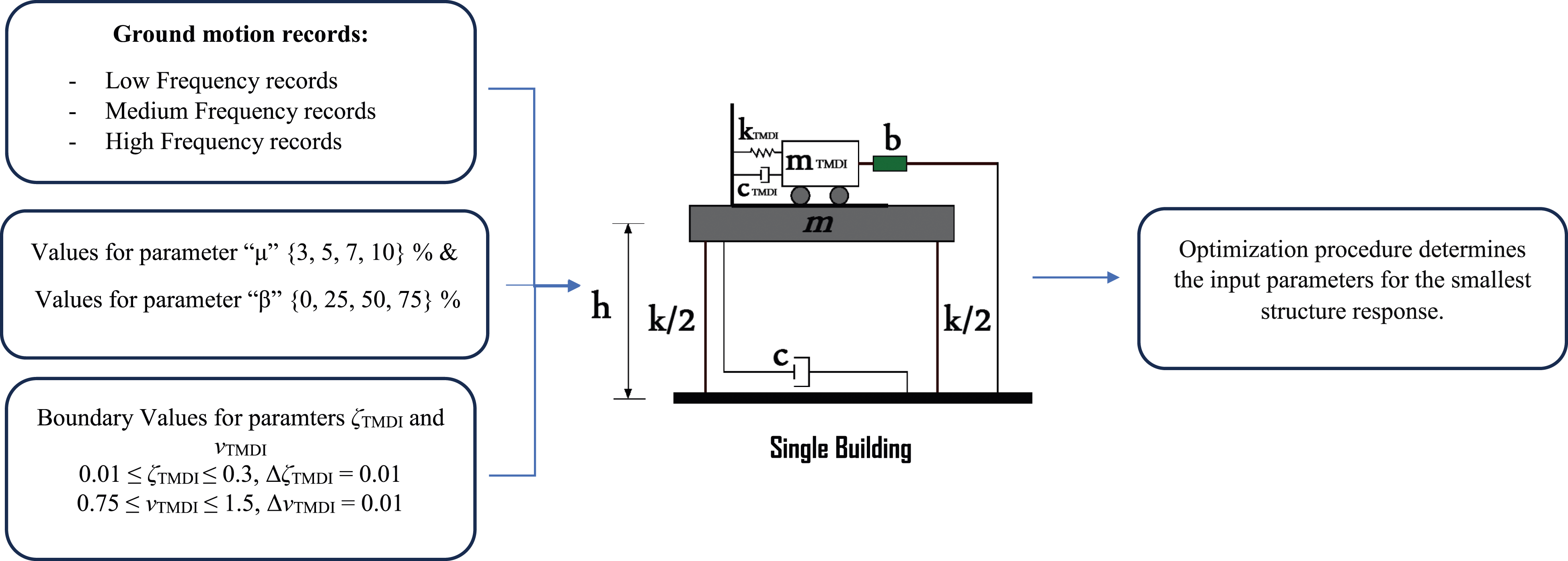
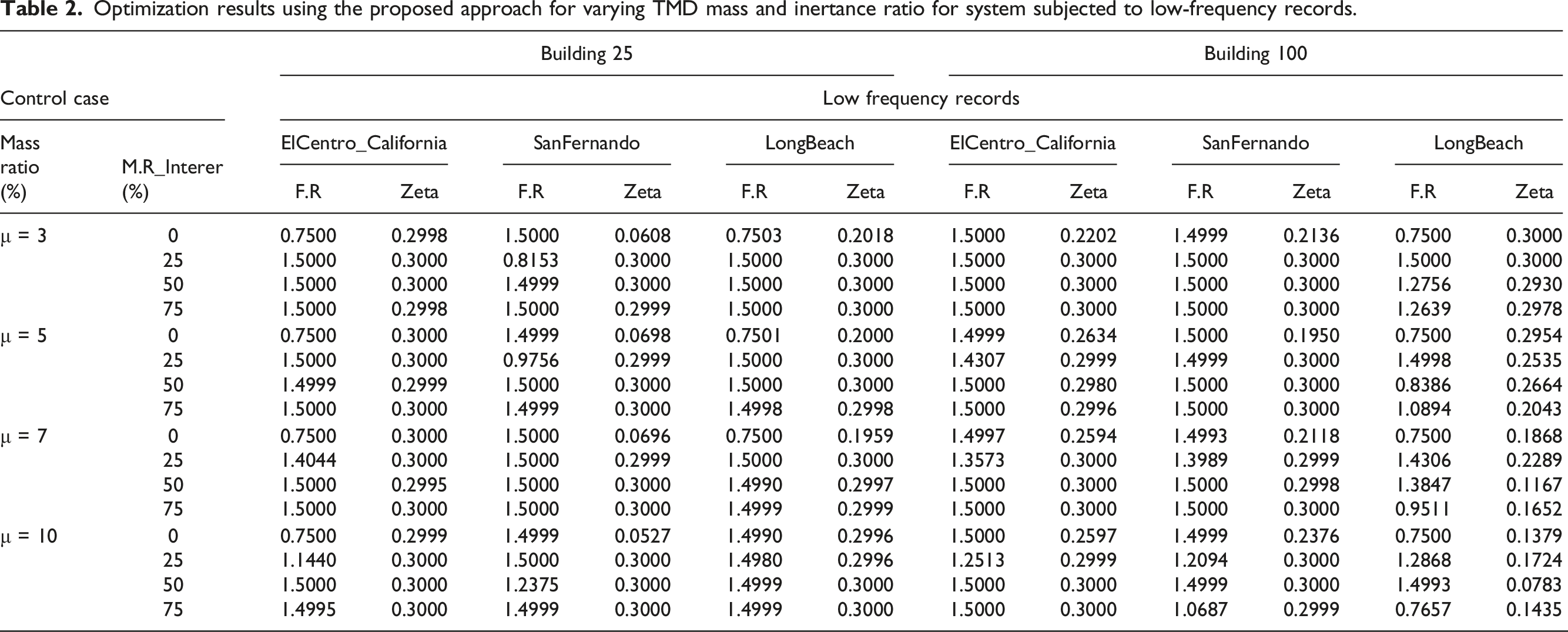
Optimization results using the proposed approach for varying TMD mass and inertance ratio for system subjected to low-frequency records.
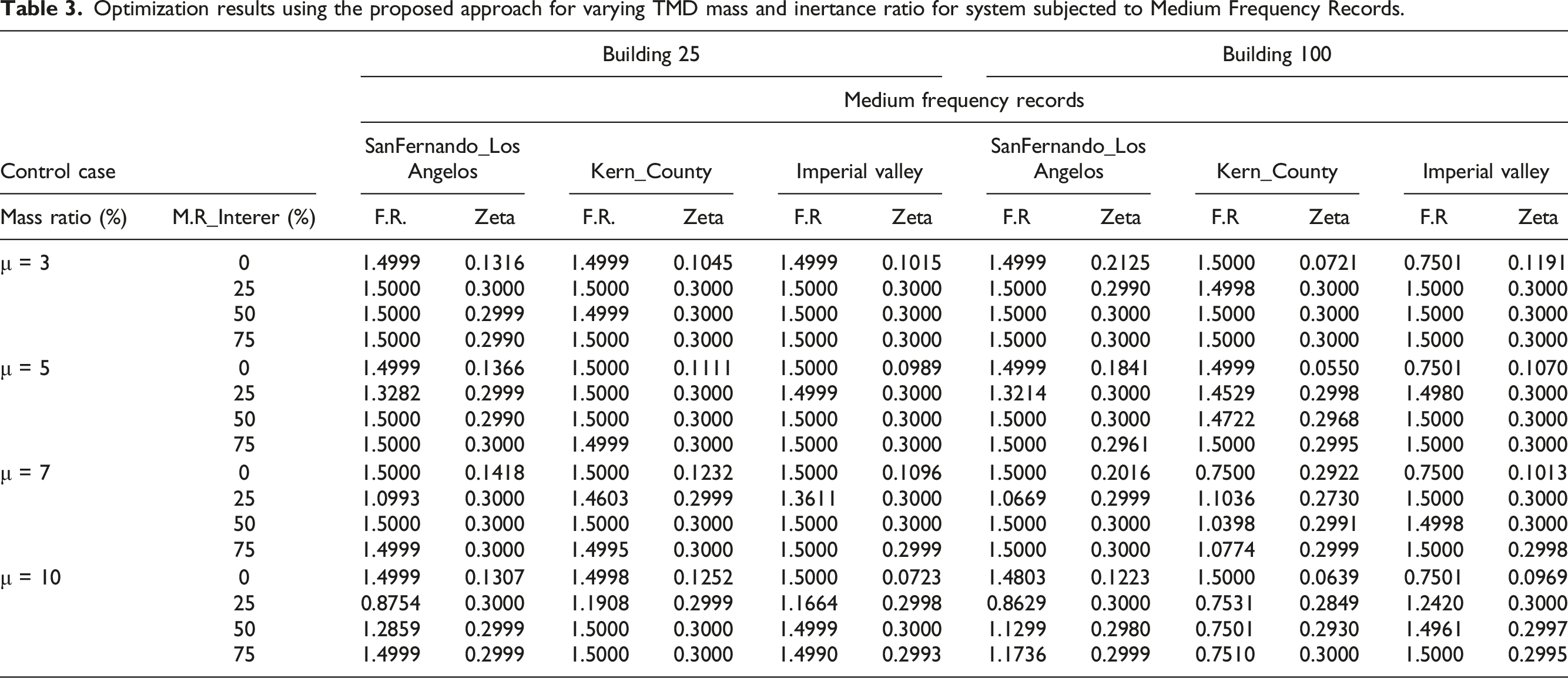
Optimization results using the proposed approach for varying TMD mass and inertance ratio for system subjected to Medium Frequency Records.
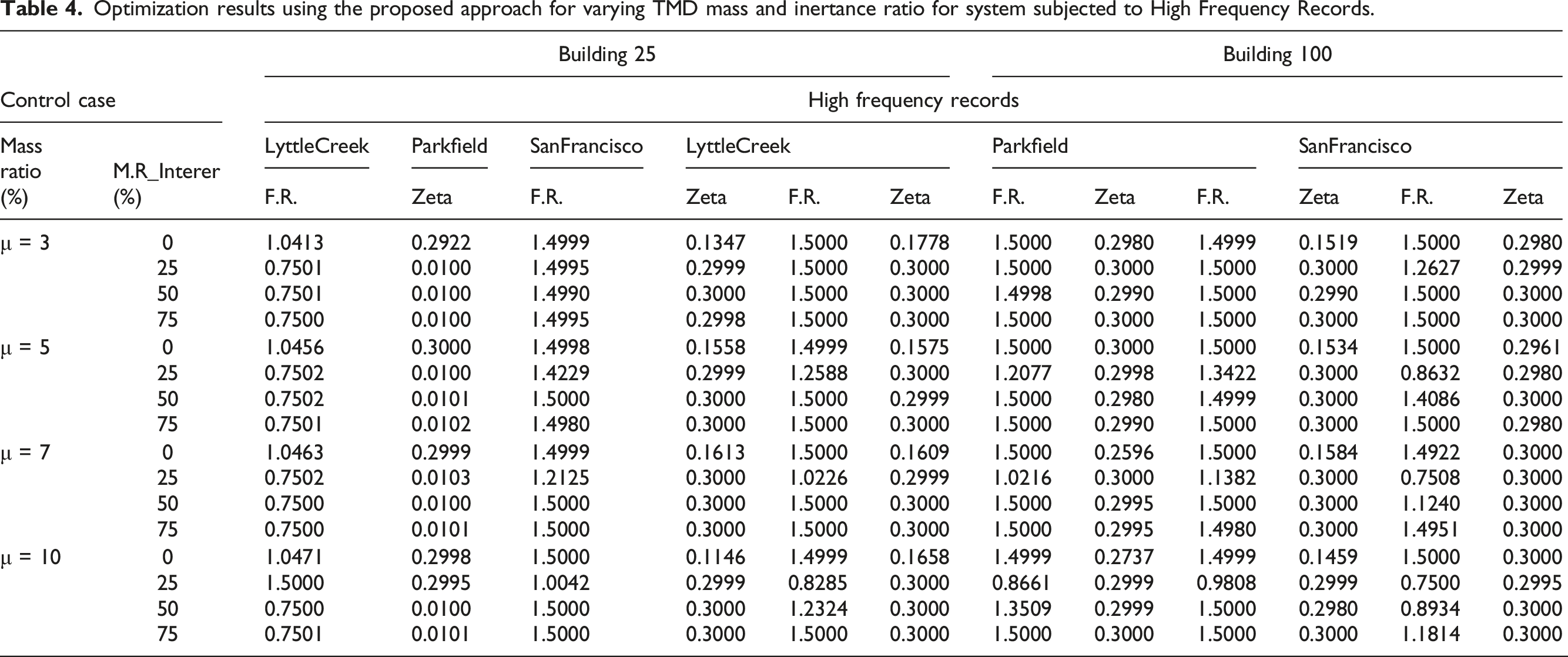
Optimization results using the proposed approach for varying TMD mass and inertance ratio for system subjected to High Frequency Records.
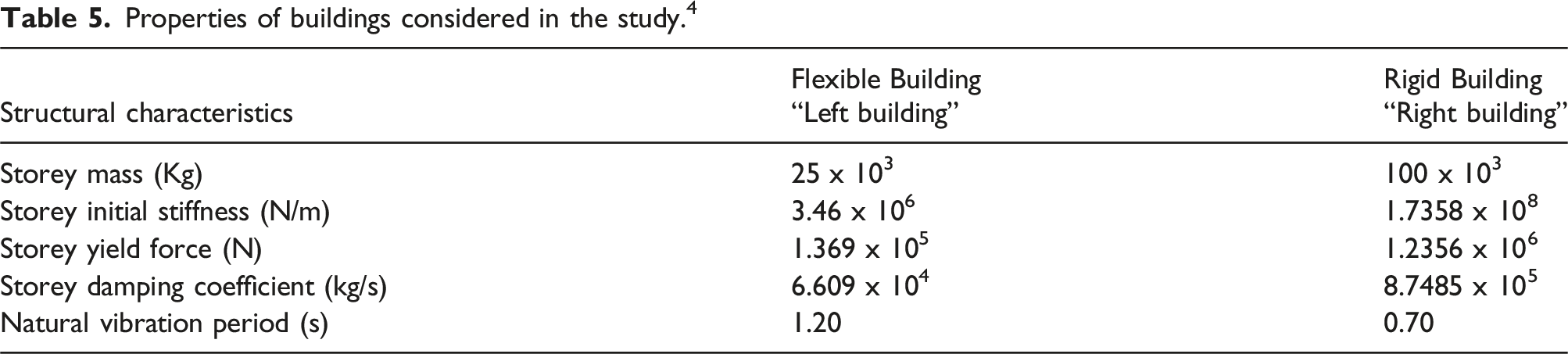
Properties of buildings considered in the study. 4
Numerical simulations
This section investigates a strategy to control the displacement response and mitigate the induced pounding forces during collisions between adjacent buildings through a TMDI with adjusted and optimized deign parameters. A developed GA in MATLAB is used to perform the optimization process considering the frequency content of the applied earthquake loads. Both of the considered neighboring buildings are idealized as SDOF systems with lumped masses at the floor level. The selected dynamic characteristics of the buildings in terms of mass and stiffness are chosen such that one of the buildings behaves in a flexible way and the second building becomes a rigid one. The dynamic properties of the modelled buildings are presented in Table 5. An assumed damping ratio of 0.05 is used to perform the dynamic analysis. The adjacent buildings are modelled such that three different scenarios are developed. These scenarios are subjected to nine unidirectional earthquake records with varying frequencies and scaled to a PGA of 0.5 g. The effectiveness of the TMDI in controlling movements of buildings and mitigating collisions is compared under the developed three different configurations in terms of controlled and uncontrolled buildings. The study is carried out for a single-story building model equipped with a TMD (β = 0) and eventually replaced by a TMDI in order to demonstrate the advantages and efficacy of the external passive vibration control device in reducing the vibration of existing structures under seismic actions. In addition, the study considers adjacent uncontrolled buildings as one of the developed configurations for performing the analysis. The other two configurations considered during the analysis assume that either one building or both buildings are equipped with a TMDI (i.e., controlled buildings). Further, the influence of frequency content of the excitation records is also examined during the performed simulations. The response parameters of interest for the current study are the displacement and pounding force.
Single building model
This section presents numerical results that demonstrate the effect of attaching a TMDI to Single-building model compared with the results of both uncontrolled single building and controlled one using a conventional TMD. To accomplish this, the peak values of displacement response time-histories of the structure are determined under variable mass and inertance ratios subjected to earthquake records with varying frequencies.
Figure 5 illustrates the peak values of the displacement time-histories of the single building models without control, with control by a TMD, and with a TMDI. Values of μ = 10% of the structure’s total mass, and the inertance ratios of β = 0%, 25%, 50%, and 75% are used to perform the analysis under “San Fernando,” “Imperial valley,” and “Parkfield” earthquakes as representatives of low-, mid-, and high-frequency records. Displacement time-histories for uncontrolled and controlled single building with (a) TMD (i.e., 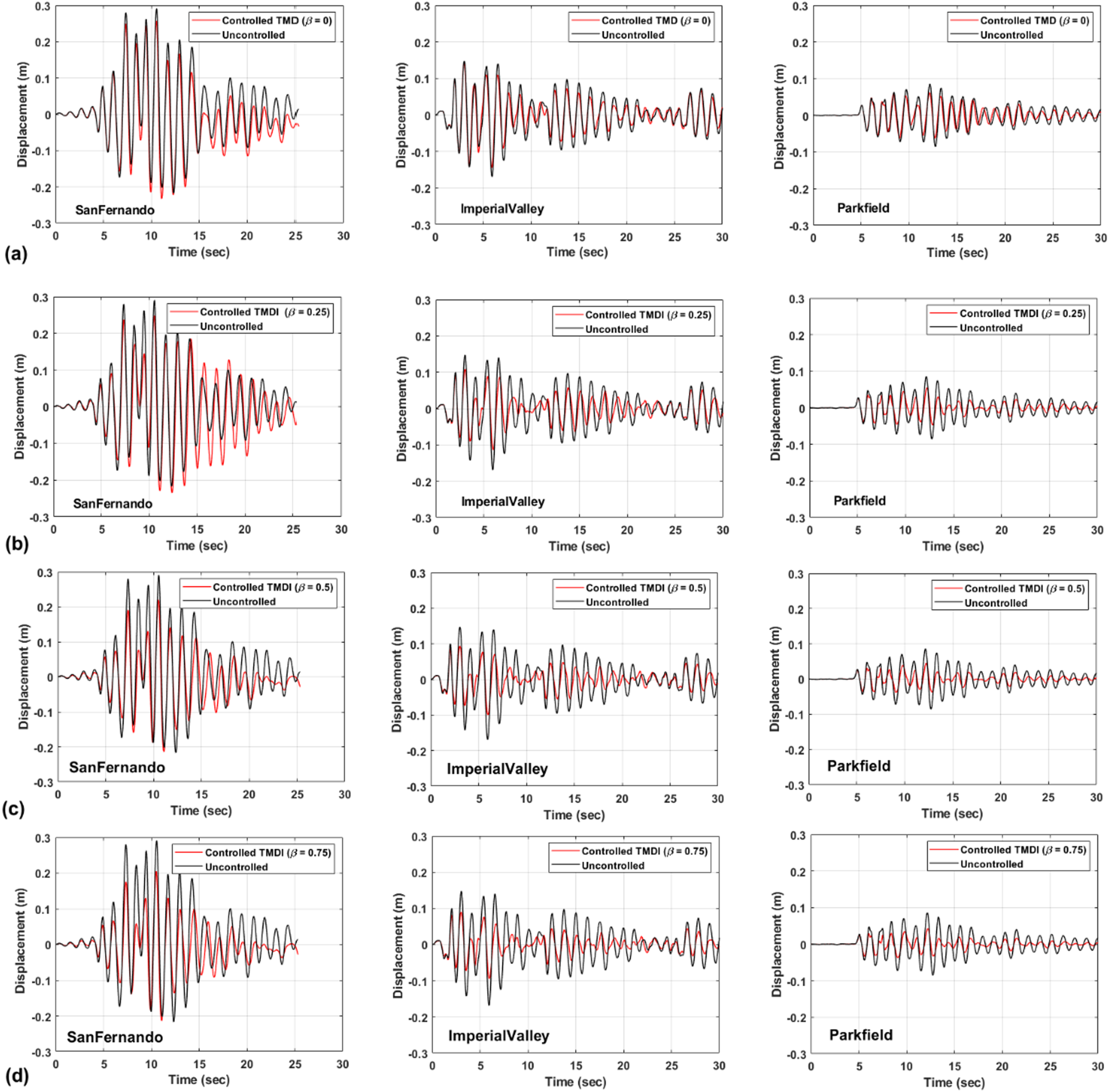
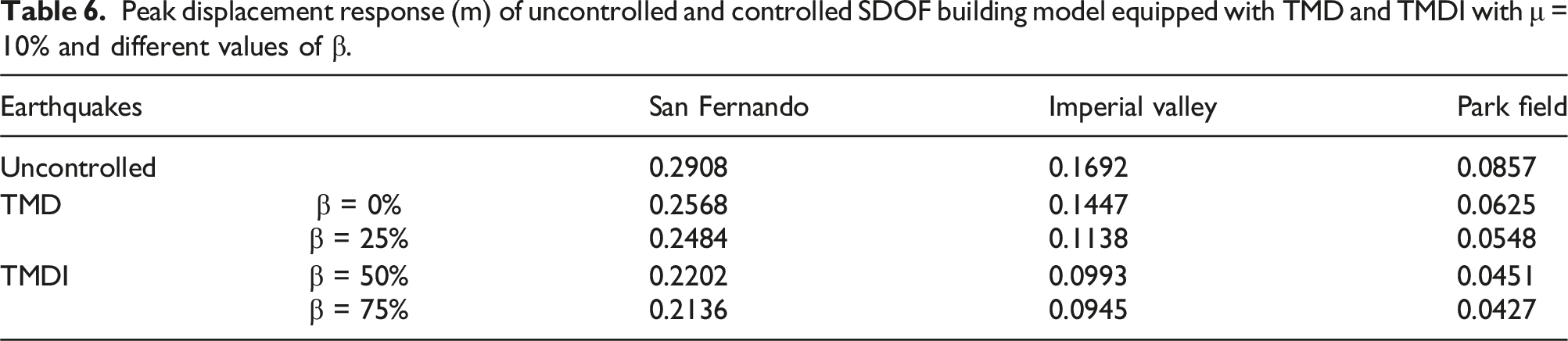
Peak displacement response (m) of uncontrolled and controlled SDOF building model equipped with TMD and TMDI with μ = 10% and different values of β.
The effect of variations of mass ratio, Displacement time-histories for uncontrolled and controlled single building with TMDI ( 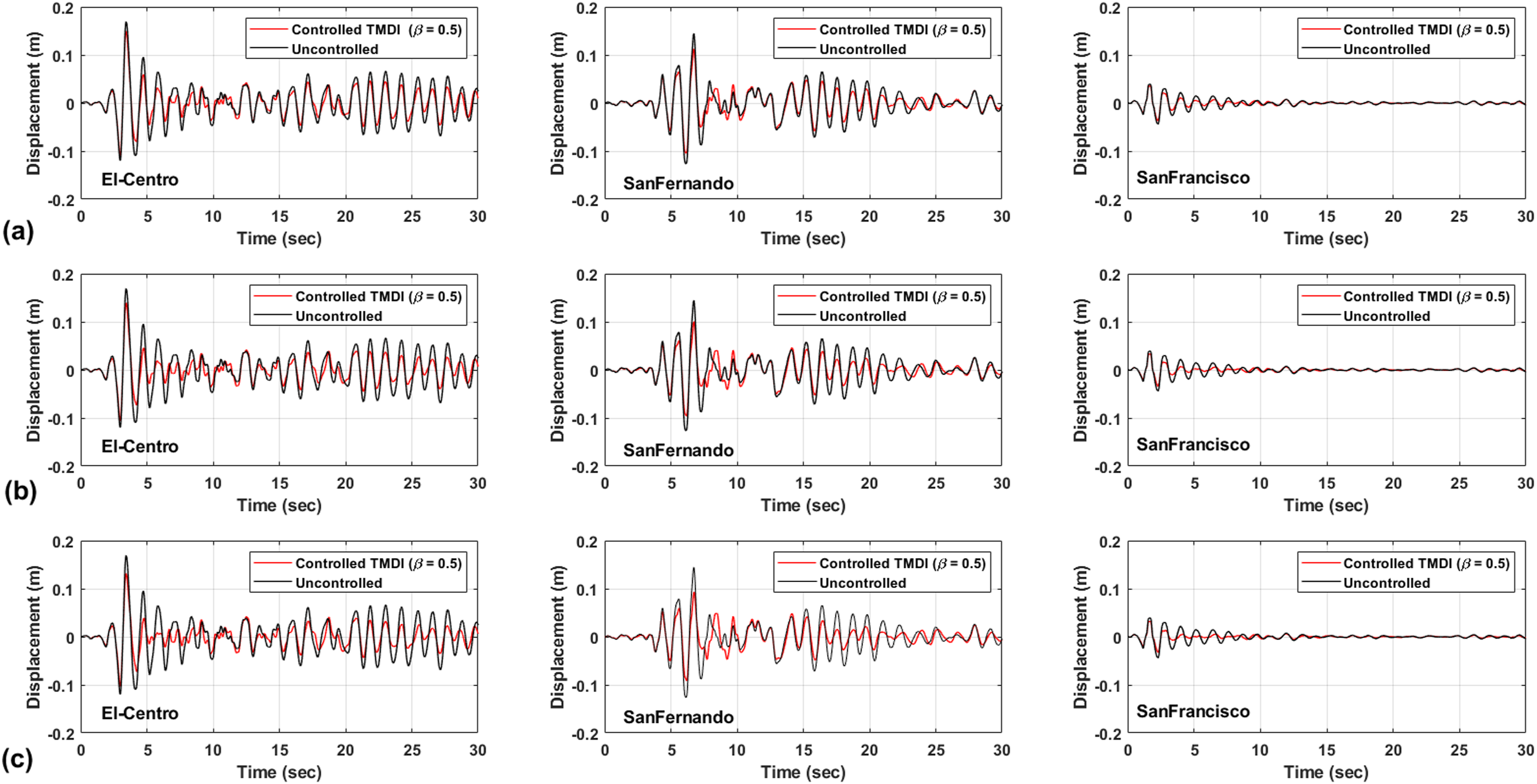
Considering the performance index (PI) is essential. The primary objective of the PI is to evaluate and compare the uncontrolled and uncontrolled responses of the structure using either TMD or TMDI. It has been noticed that there is an inverse relationship between the degree of improvement attained and the value of PI.
The results of the peak displacement response quantities and PI obtained for various mass ratios (μ = 3%, 5%, 7%, and 10% of the main structure’s total mass) and various inertance ratios (β = 25%, 50%, and 75%) compared to the conventional TMD’s inertance ratio (β = 0) for the two buildings considered are shown in Figures 7 and 8. Performance index of flexible building considering different inertance ratios and Different Mass ratios (A) μ = 3%, (B) μ = 5%, (C) μ = 7 %, and (D) μ = 10%. Performance index results of rigid building considering different inertance ratios and Different Mass ratios (A) μ = 3%, (B) μ = 5%, (C) μ = 7%, and (D) μ = 10%.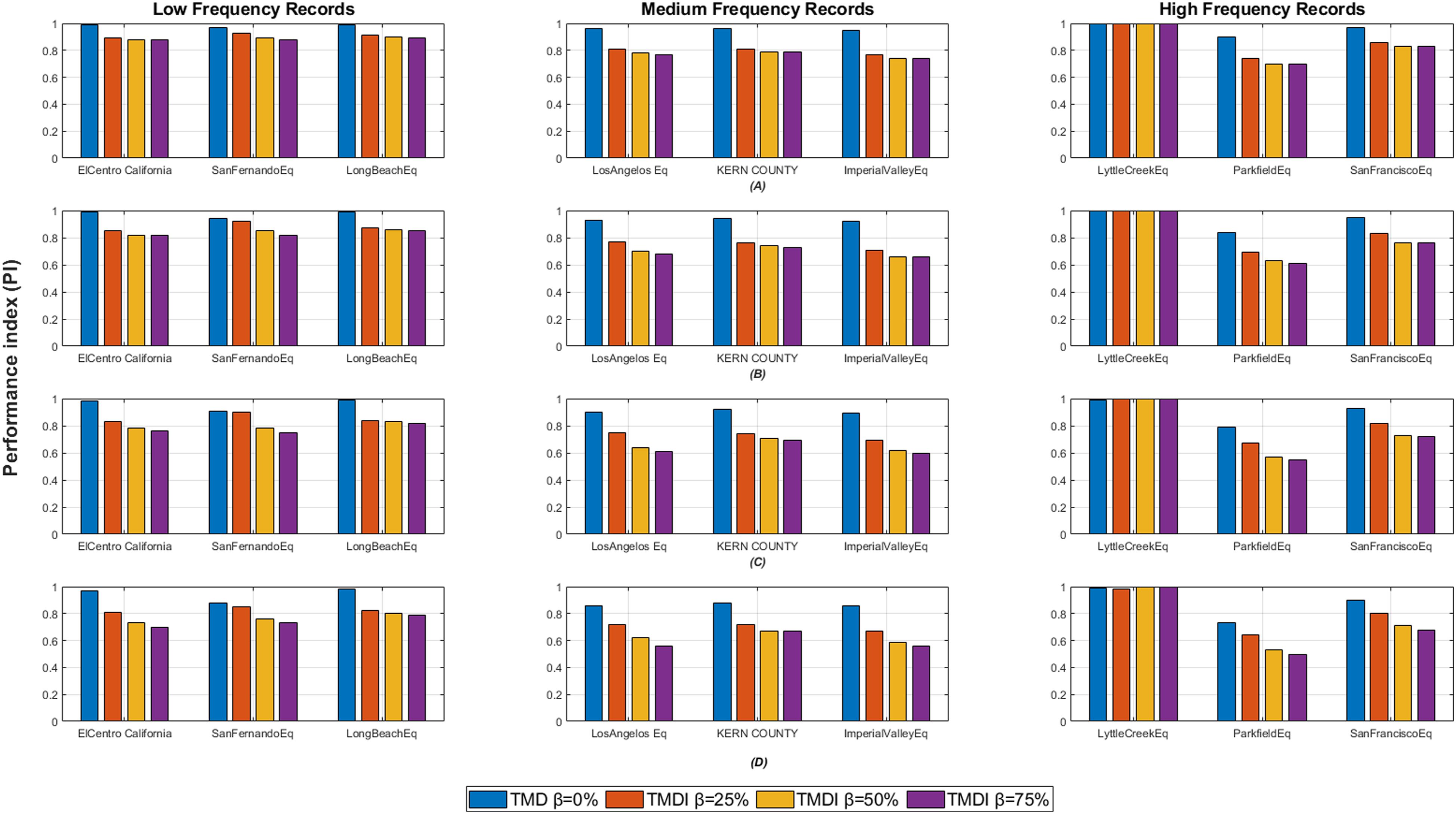
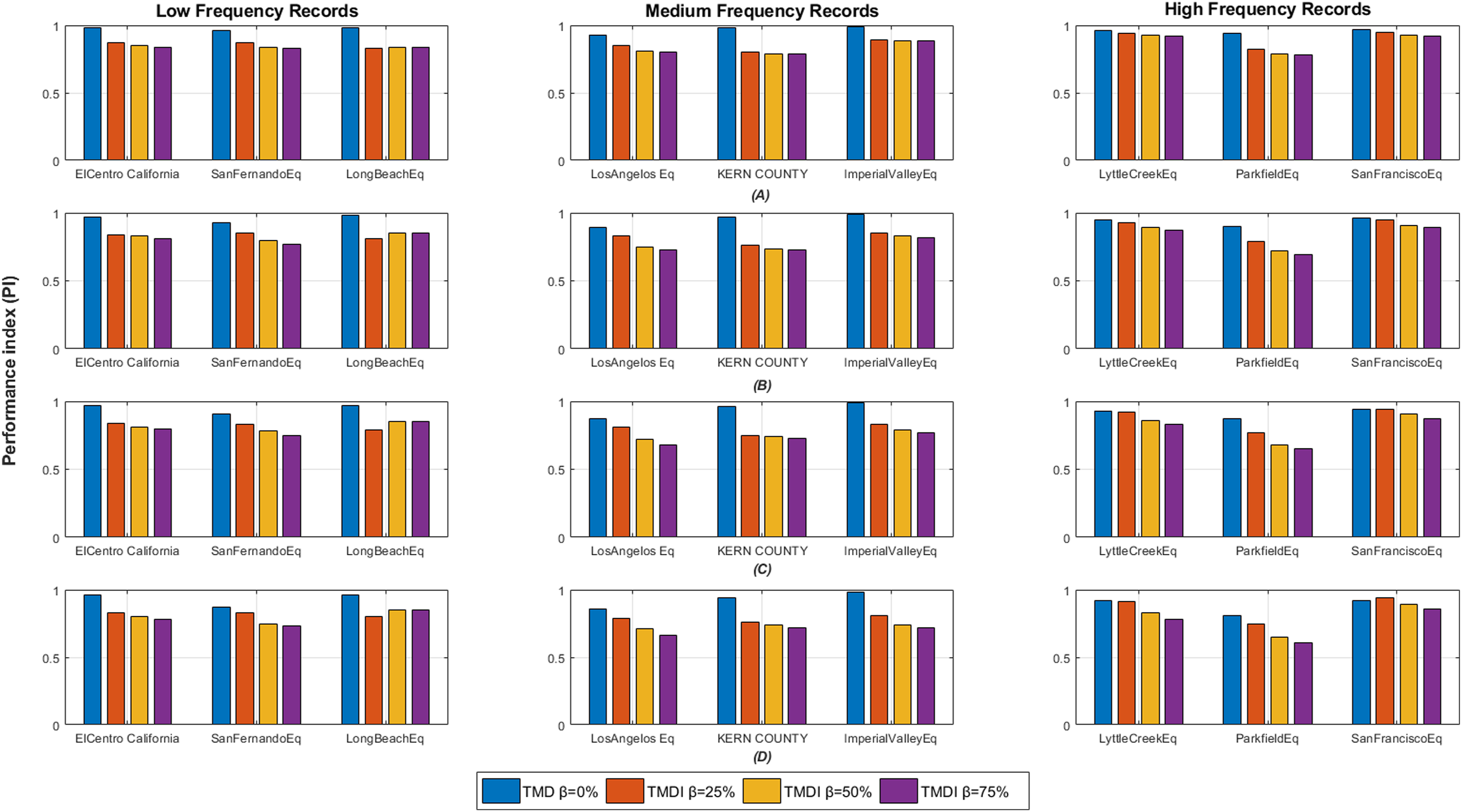
Based on Figures 7 and 8, it is evident that the structure’s control is enhanced where the PI index decreases by incorporation of inerter with the conventional TMD. In addition, increasing inertance ratio significantly enhanced structure’s control. The mass ratio (μ) also has a significant effect on the structure control; the trend of the results indicates reduction in PI index with the increasing of mass ratio. Additionally, as the μ increases, the effect of seismic frequencies on the PI index becomes more pronounced as observed. The provided numerical results clearly indicate that the implementation of TMD leads to reduction in the dynamic response while incorporating the inerter to TMD mechanism considerably reduce the induced responses as measured by the value of PI.
Adjacent building models
This section presents numerical results of insufficiently separated building models of single storey and different dynamic characteristics (see Table 5) to ensure pounding. The developed models for the neighboring buildings include the uncontrolled scenario as a reference for comparison purpose. Two different scenarios to indicate the influence of controlling the buildings using TMDI were also developed. The incorporated TMDI has optimized designed parameters following Optimal TMDI parameters and the developed GA to ensure optimal performance and efficiency of TMDI during collisions to reduce the seismic-induced responses of the adjacent structures.
The developed adjacent building models are subjected to unidirectional earthquake records selected from Table 1 in terms of the El-Centro, San Fernando, and Parkfield as representative of low-, mid-, and high-frequency content records, respectively. The displacement and the corresponding pounding forces due to the interaction between the adjacent two buildings for the three considered ground motion for 5% of critical damping are presented in Figure 9 and Table 7. Displacement and pounding force time-histories of adjacent buildings with a constant inertance ratio β = 25% and μ = 3%, for (a) uncontrolled buildings, (b) one controlled building, and (c) two controlled buildings. Peak displacements and pounding forces induced for three scenarios under different frequency records.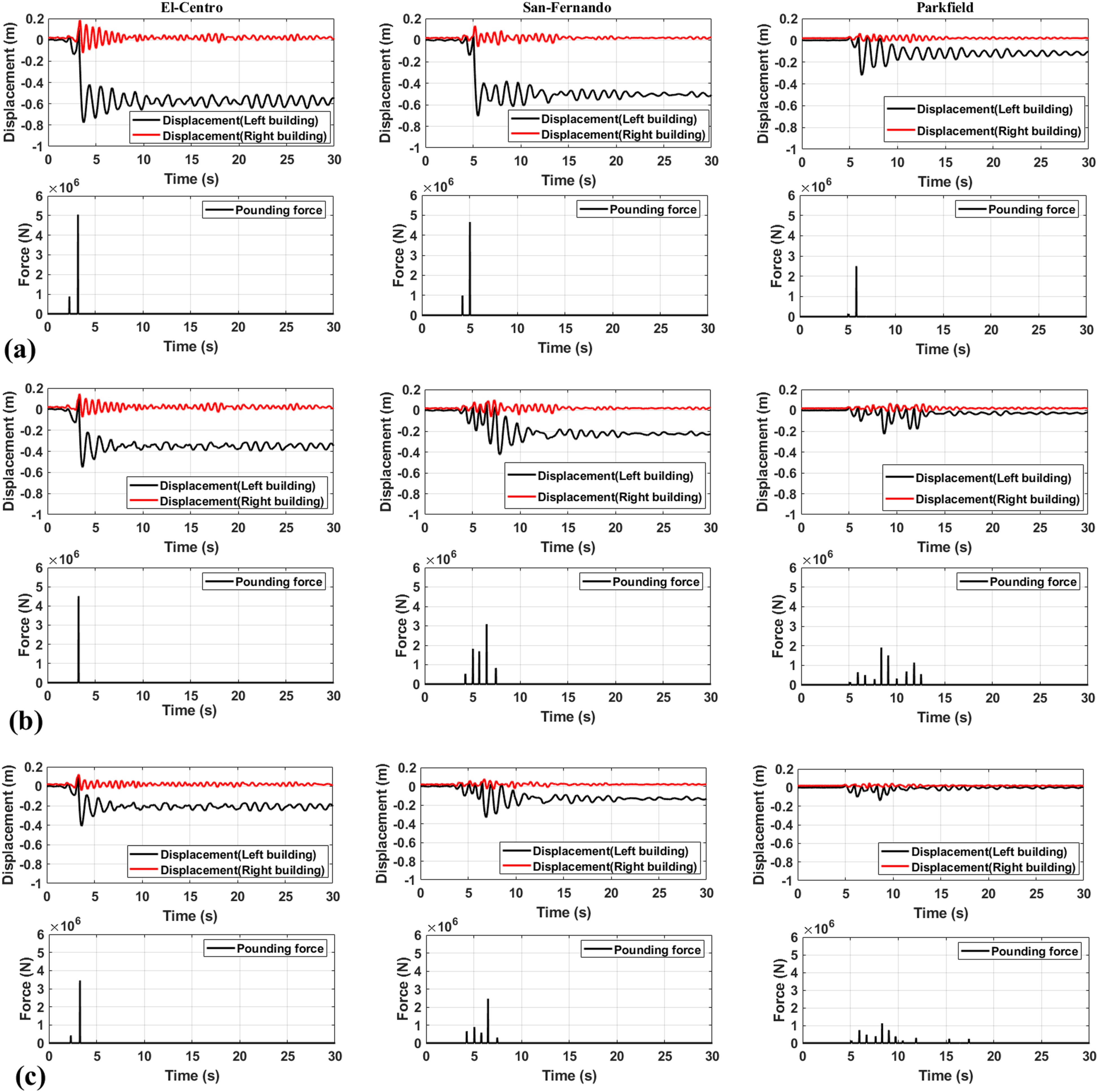
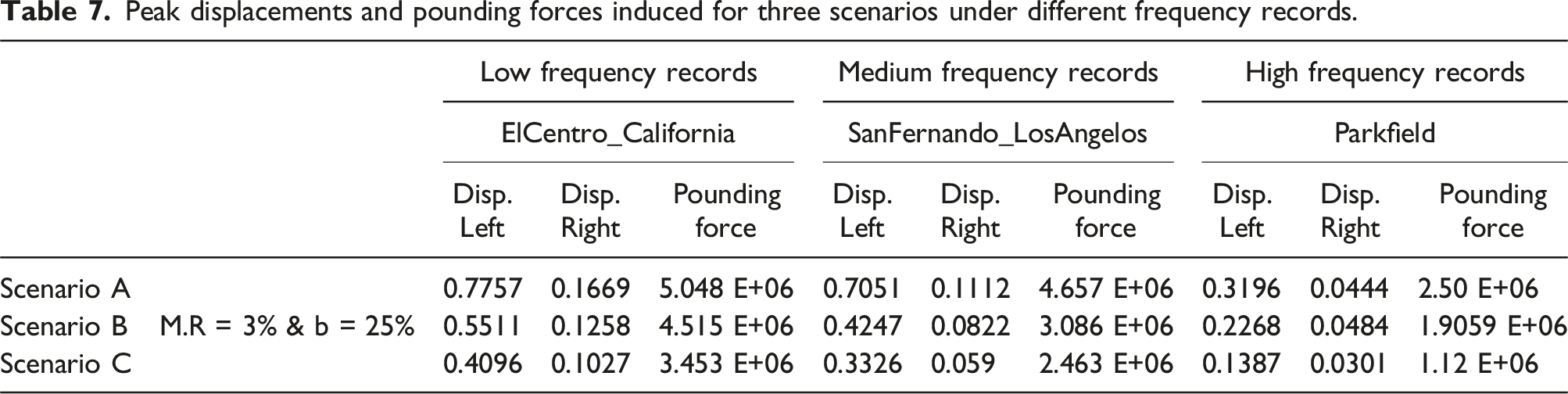
Figure 9 illustrates the displacement time-histories for the three developed scenarios under low the El-Centro, Sanfernando, and Parkfield as representative to low, mid, and high frequency ground motions setting the in between separation gap as 0.02 m. Additionally, the induced pounding forces due to collisions at the superstructure level to the excitation records are also illustrated in the same Figure. The captured peak values of displacements and pounding forces are also summarized in Table 7. It can be seen from Figure 9 and Table 7 that the two adjacent uncontrolled buildings, labelled (a), produce higher impact forces during collisions as compared to the values obtained with the other two scenarios labelled (b) and (c).
As it can be seen from the figure and for the considered three scenarios, the obtained seismic displacements and pounding forces for the adjacent buildings under records of low and mid frequency contents are significantly different comparing with the results under records of high-frequency contents (see Figure 9). The figure clearly indicates that, after the second collision, particularly under low-frequency records, the lighter building moves substantially into the opposite direction and becomes unable to be back again to collide with the heavier building. This can be due to entering the light building into yielding with observed permanent deformation as a result of the massive collision under low and mid frequency records. However, under high frequency records, the adjacent buildings come into contact several times indicating that they are moving in the elastic range without noticeable deformation.
For the first scenario, in which the two buildings are uncontrolled, the captured peak pounding force due to collisions has been found to be 5.048 E+06 N under the El-Centro of low frequency. Attaching a TMDI to the left building, as described previously for the second scenario, reduces the peak induced force due to collision by about 11%. Such a decrement percentage jumps to about 32% when attaching the TMDI to both buildings as suggested in the third scenario. However, the corresponding decrement values under sanFernando records of mid frequency have been found to be of 34% and 50% when attaching a TMDI to only left building and to both buildings, respectively. For Parkfield earthquake with high frequency, the induced peak pounding force due to collision between the uncontrolled buildings has been found to be 2.50 E+06 N and the corresponding decrement values when controlled one building and controlled both buildings are 24% and 55.2%, respectively.
These percentages of decrement significantly emphasis the role of TMDI in minimizing the impact of collisions between insufficiently separated buildings particularly under excitation of mid and high frequency records. The study’s findings also show that TMDI has a substantial impact on the peak displacement responses, particularly the more flexible and lighter structure’s response (left structure). The captured peak displacement for the uncontrolled buildings under the El-Centro earthquake has been decreased by about 48% compared with the scenario of controlled buildings. The corresponding percentage of decrease for displacement of uncontrolled buildings under SanFernando compared with controlled buildings scenario has been found to be 53%. For building models excited by Parkfield, a displacement reduction of about 57% has been recorded. As it can be seen from the plotted and calculated results, the higher the frequency of the records, the higher the decrement percentage in the induced seismic responses in terms of building’s displacement and induced peak forces and number of impacts due to collisions as well.
In order to assess the efficacy of increasing mass ratio and connecting tuned mass dampers with an ineter in mitigating pounding forces and peak displacement responses, two adjacent controlled buildings are subjected to low-frequency, moderate-frequency, and high-frequency earthquakes, as illustrated in Figure 10. The study’s findings show that TMDI connecting the structures has a substantial impact on the pounding-related responses, particularly the more flexible and lighter structure’s response (left structure). On the contrary, the findings indicate that collisions slightly affect the response of the more massive and rigid structure (right structure). It can be seen that increasing the mass ratio of the controlled building leads to a noticeable reduction in peak displacement demands for all earthquakes with different frequency contents. Displacement and pounding force time-histories of adjacent buildings with constant inertance ratio β = 25% and variable mass ratio (a) μ = 3%, (b) μ = 5%, (c) μ = 7%.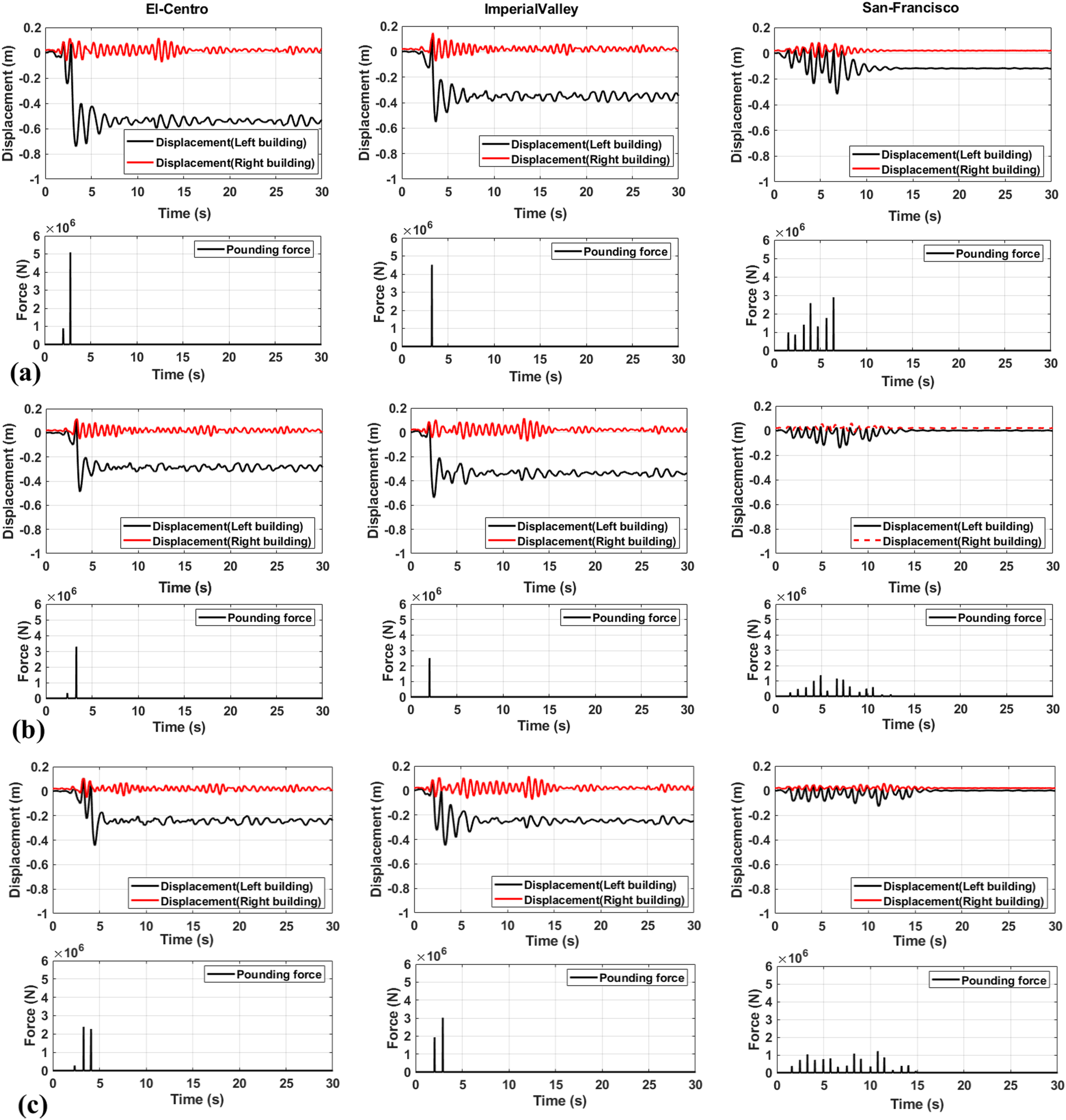
Quantitively, the captured peak displacements for building models subjected to El-Centro are 0.5511 m, 0.4876 m, and 0.4437 m for μ = 3%, 5%, and 7%, respectively. Furthermore, in comparison to a structure with a lower mass ratio, the structure with a higher mass ratio exhibits the smallest values of pounding force. Quantitively, the captured peak pounding force during collisions between buildings under the El-Centro earthquake are 4.515 E+06 N, 3.290 E+06 N, and 2.396 E+06 N for μ = 3%, 5%, and 7%, respectively. As expected, an increase in the mass ratio has a beneficial effect on reducing the pounding force between adjacent buildings but also leads to an increase in the number of pounding cycles especially in high-frequency records.
On the other hand, it is important to note that the peak displacement and pounding force of adjacent buildings are severely affected by the earthquake frequencies. The pounding force values with μ = 5% in low, mid, and high frequency are 3.290 E+06, 2.510 E+06, and 1.373 E+06, respectively. Resulting that high-frequency records results in the lowest pounding forces and the lowest values of the displacement of the buildings. As mentioned, that low and mid frequency records produce higher impact forces during collisions, as compared to the values obtained from highfrequency records. Consequently, those higher forces act on buildings leading to higher displacements, which can be so large that the structures may not come back into contact again and permanent deformation due to yielding of the left structure may take place. This generally leads to the decrease in the number of impacts, as compared to the number of impacts for the high-frequency earthquake is considered as shown in Figure 10 that the number of pounding cycles increases on high frequencies higher than low and mid frequencies.
Figure 11 depicts the variance in the reduction factor (RF) of the pounding forces of adjacent controlled building models by TMDI having a μ Pounding forces reduction factor of adjacent buildings during different earthquakes for constant mass ratio and variable inertance ratio for the two buildings controlled “Scenario C.”
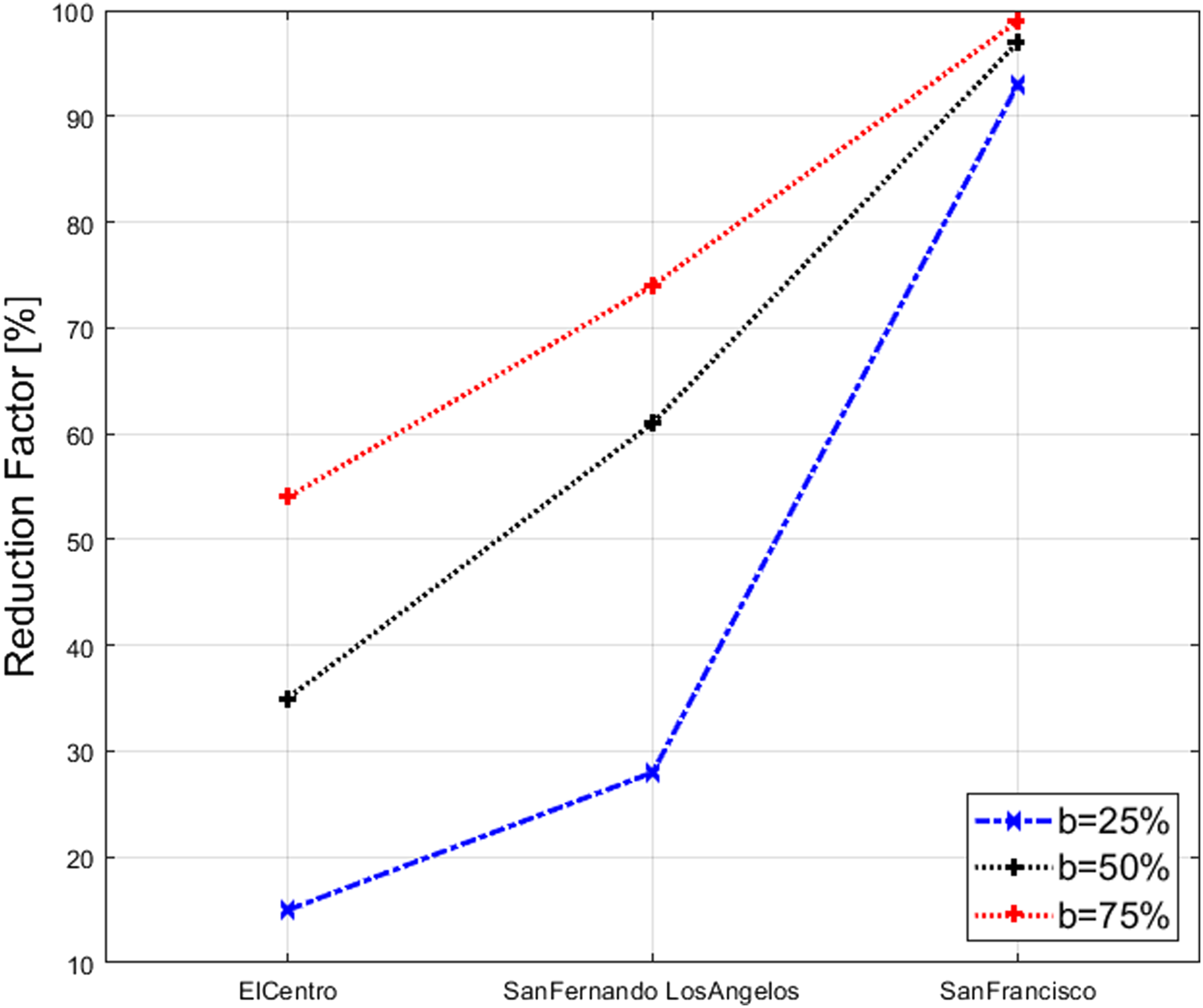
Based on the obtained results, the RF obviously increases considerably with the increase in the inertance ratio.
As can be seen from the figure, the RF for the El-Centro at inertance ratio, b = 25%, is almost 15%. This percentage jumps to 35% and 54% with the increase in the introduced inertance ratio, as b = 50% and b = 75%, respectively. Similarly, for the San Fernando records, the calculated RF percentages, respectively, are 28%, 61%, and 74% for inertance ratios, 25%, 50%, and 75%. For records of high frequency such as San Francisco, the captured percentages show insignificant difference. These results clearly indicate that, for structures subjected to earthquake records of high frequency content, the variation in inertance ratio appears to be slightly significant in reducing the induced forces due to collisions. However, for records contain low or mid frequency contents, the variation in the introduced inertance ratio substantially affect the reduction factor.
Variations in the frequency content of the excitation records substantially influence the induced RF values where significant increase from 15% to 93% in the induced collision forces between controlled adjacent buildings with inertance ratio, b = 25%, have been found under applied records of low and high frequency contents, respectively. However, the increase in inertance ratio to 50% minimizes that jump to be 35% to 97%. Reaching an inertance ratio of 75% provides an RF of 54% at low-frequency records and 99% at high frequency records.
Conclusions
In the current study, the significance of TMDI on controlling the seismic responses of single and adjacent buildings under strong earthquake records is investigated. The sensitivity of this significance to earthquake frequency content is also investigated. The ideal values for the design parameters of the TMDI are determined through a developed GA. The optimal values are then utilized to simulate the seismic response of the building models. The peak pounding forces due to collisions and peak floor displacements obtained from the performed nonlinear time-history analyses using different scenarios are considered. The developed scenarios include one building or both buildings are equipped with TMDIs. Another scenario includes adjacent uncontrolled buildings as the basis for comparison. Emphasis is also given to the influence of the frequency content of the applied records on the induced responses with and without the installation of a TMDI. In order to assess the impact of the frequency content, a performed comparison of the responses of the considered different scenarios subjected to selected nine records with varying frequencies in terms of low, med, and high frequency records is carried out after scaling the records to match a PGA of 0.5 g.
Based on the obtained results, herein the following conclusions may be drawn: (a) Incorporating an inerter into a TMD mechanism reduces the peak displacement responses of single building models exposed to excitation records having different frequency contents. (b) The optimized parameters enhance the TMDI efficiency and increase its value as a device for controlling the structure’s response as well. (c) The frequency content of the applied records appears to be an influential parameter that affects the induced displacement of a controlled single building. The higher the frequency content of records, the higher the percentage decrease in displacement response incorporating the TMDI into a single building model and vice versa. (d) The mass ratio (μ) has a beneficial effect on the structure’s control where increasing the mass ratio of the controlled building leads to a noticeable reduction in peak displacement demands, peak pounding forces, and reduction in PI index for all the considered earthquakes with different frequency contents. However, such an increase in mass ratio leads to an increase in the number of pounding cycles especially under records of high frequency. (e) Low and mid frequency records produce higher impact forces during collisions leading to large enough displacements that cause permanent deformation due to yielding of uncontrolled building. However, attaching a TMDI minimizes such a formed deformation due to yielding. (f) Variation in inertance ratio appears to be slightly significant in reducing the induced forces due to collisions for structures subjected to earthquake records of high frequency content. However, for records contain low or mid frequency contents, the variation in the introduced inertance ratio substantially affect the reduction factor.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.