
Abstract
In this paper, the Korteweg-de Vries-Benjamin-Bona-Mahony-Burgers (KdV-BBM-B) equation is investigated which plays an essential role in numerous subjects of engineering and science. Using the theory of planar dynamical systems, we qualitatively analyze the bounded traveling wave solutions of the KdV-BBM-B equation. The conditions about the presence of bounded traveling wave solutions are obtained resoundingly. Meanwhile, the relationships between the waveform of the bounded traveling wave solution and the dissipation coefficient γ are investigated. Furthermore, when the absolute value of the dissipation coefficient γ is bigger than the critical value, the equation has a kink solitary wave solution. Nevertheless, when |γ| is less than the critical value, the solution has oscillatory and damped properties. According to the evolution relations of orbits in the global phase portraits which the damped oscillatory solutions correspond to, by using undetermined coefficients method, we obtain the approximate damped oscillatory solutions with a bell head and oscillatory tail, and the approximate damped oscillatory solutions with a kink head and oscillatory tail. By the idea of homogenization principle, we give the error estimates for these approximate solutions by establishing the integral equations reflecting the relations between approximate damped oscillatory solutions and their exact solutions. The errors are infinitesimal decreasing in the exponential form. Finally, to better understand the dynamics of the oscillatory damped solution, we give a graphical analysis of the effect of the dissipation coefficient γ on it.
Keywords
Introduction
As is known to all that nonlinear wave equations (NLWEs) are fundamental physical models which have been applied in various fields, especially in physics.
The problem of solving NLWEs is an ancient and important research topic. Although many scholars have done a lot of work on solving the problem, due to the complexity of NLWE itself, the solutions that can be obtained are only a small part of the implication of NLWE itself, and NLWEs that can be solved accurately are also very few. Therefore, in the process of studying the solution of NLWE, it is mainly studied from two aspects: the exact solution and the approximate solution.
Solutions in different forms are the most interesting research points of NLWEs. 1 In order to research NLWEs that model wave phenomena, the traveling wave solution should be studied first. Traveling wave solution plays a very important role in nonlinear science, they can well describe various natural phenomena, such as vibrations, propagating waves, and solitons. Traveling wave solution is a solution of permanent form moving with a constant velocity. There are many types of traveling wave solutions that are of particular interest in solitary wave theory that is rapidly developing in many scientific fields from water waves in shallow water to plasma physics. However, not all equations can be solved by a certain method, so it often requires clever construction by the researcher when studying.2,3 A variety of powerful methods have been developed to study traveling wave solution such as Hirota bilinear method,4,5 inverse scattering transformation,6,7 Darboux transformation and Bäcklund transformation8–10 and so on.11–18 In addition, there is a kind of method that based on the theory of planar dynamical systems. This method mainly uses the bifurcation theory of the dynamic system and combines with the phase diagram of integrable wave system, many exact traveling wave solutions have been obtained using elliptic functions as well as other tools.
In recent years, Li and Zhang 19 constructed the first integration method combined with phase diagram analysis by using the characteristics of Hamilton system. After that, Shen et al. 20 continued to promote and develop this method to find the possible bounded traveling wave solution of the equation.
After all, there are few equations that can be solved accurately. In order to study the rich characteristics of the equation itself, researchers have to take the approximate solution method. Adomian decomposition method21,22 and Padé approximation method 23 have been developed to solve the nonlinear wave equation approximately. Recently, He has applied variational iteration method24,25 and the homotopy perturbation method 26 to the solution of wave equations. Liao et al.27,28 applied homotopy analysis method to the approximate solution of wave equation. Shen et al. 29 used the qualitative theory of differential equation to construct the approximate solution of the equation according to the characteristics of the orbit near the equilibrium point combined with the method of computer symbolic algebra, all of which achieved good results.
Since Poincaré, a famous French mathematician, used qualitative theory to study dynamical systems, the theory of dynamical systems has made great progress, and it has penetrated into various branches of mathematics.
The study of NLWEs focus on the evolution of waves over time, particularly solitary waves in equation. In fact, it is a special coherent structure, which is a limit state for the traveling wave solution of NLWEs. Very recent and related research works are included such as Mohammed et al. (2021), Baber et al (2024), Mohammed et al. (2022), Alshammari et al. (2022).30–33 It can be analyzed as homoclinic or heteroclinic orbits of the ordinary differential equation that characterizes the traveling wave solution.
Because wave comes across the damping in the movement, dissipation would rise. G.B. Whitham
34
pointed out that one of basic problems which need to be concerned for nonlinear evolution equations is how dissipation affects nonlinear system. Therefore, motivated by this question, the main purpose of this paper is to make a qualitative analysis of the KdV-BBM-B equation in the form
35
.

Equation (1.1) is a complex equation that integrates the characteristics of several classical nonlinear partial differential equations and is extensively applied in the domains of fluid mechanics, nonlinear acoustics, and gas dynamics. This equation possesses a remarkable advantage in depicting nonlinear wave phenomena in fluids. The capacity of equation (1.1) to account for both dispersion and dissipation effects is pivotal for comprehending the wave behavior in complex fluid systems. In the realm of nonlinear acoustics, equation (1.1) can be utilized to model the propagation of sound waves in nonlinear media, particularly when considering the nonlinear interactions and dissipative effects of sound waves. Although equation (1.1) was not initially intended for gas dynamics, its nonlinear properties and dissipation term render it potentially applicable in the simulation of certain compressible fluid flows. With appropriate modification and extension, equation (1.1) might be employed to describe the complex flow phenomena of gases in the boundary layer, such as nonlinear fluctuations and energy dissipation in the turbulent boundary layer. When α, β, μ, δ, and γ take some given values, equation (1.1) may be reduced to other famous nonlinear model equations in physics. For α = γ = μ = 0 and β = 6, δ = 1, equation (1.1) converts to the KdV equation
36
.

The KdV equation arises in the study of shallow water waves. In particular, the KdV equation is used to describe long waves traveling in canals. Since 1960s, with the deepening of research on nonlinear phenomena, it has been discovered that there exists a broad class of wave equations or equations describing nonlinear interactions, which can be reduced to the KdV equation. For instance, these include magnetocurrent waves in plasma, ionic sound waves, non-resonant lattice vibrations, pressure waves in liquid-gas mixtures, and thermal excitation of phonon packets in nonlinear lattices at low temperatures. Therefore, the KdV equation represents a significant development in understanding important nonlinear phenomena in science.
If α = δ = μ = 0 and β = 1, γ = −1, then equation (1.1) reduces to the Burgers equation
37

If γ = δ = 0 and α = μ = β = 1, equation (1.1) becomes the BBM equation
38

This equation is crucial in physics media as it defines a great number of phenomena with weak nonlinearity and dispersion waves, involving on acoustic waves and magnetohydrodynamics waves in plasmas, longitudinal dispersive waves in elastic rods, pressure waves in liquid gas bubbles, nonlinear transverse waves in shallow water, optical fibers, etc.
If γ ≠ 0, the equation (1.1) exists a dissipative effect. Because dissipation is unavoidable in practice, Zhang investigated a number of NLWEs with dissipative effect and obtained exact bounded traveling wave and approximate oscillatory damped solutions.39–43 Tian analyzed bounded traveling wave solution of (2 + 1)-dimensional breaking soliton equation. 44 Very recent and some related work of the research on solitary wave solutions and dynamical behaviors such as.45–50 However, we will investigate the effect of the dissipation coefficient γ and find an accurate or approximate oscillatory damped solution as well as their error estimate. To the best of our knowledge, the problem about bounded traveling wave solutions of the equation (1.1) on the basis of the theory of planar dynamical systems has not been reported yet.
The outline of this paper is as follows. Firstly, we make a qualitative analysis of the dynamic system corresponding to (1.1). The conditions for the existence of global phase diagrams and bounded traveling wave solutions with different parameters are discussed. Then, the relation between the waveform of the bounded traveling wave solution of the equation (1.1) and the dissipation coefficient γ is expressed. Furthermore, we construct the bell profile solitary wave solutions and kink profile solitary wave solutions of the equation (1.1) by using the method of undetermined coefficients. Meanwhile, the approximate vibration damping solutions under two different conditions are given. Finally, we derive an error estimate and discussions of the approximate oscillatory damping solution of (1.1). The sixth part is the conclusion and prospect of this paper.
Qualitative analysis of bounded traveling wave solutions
It is evident that the traveling wave solutions u (x, t) = u(ξ) = u (x − vt) of equation (1.1) satisfy


Let x = U(ξ), y = U′(ξ), then (2.2) can be reduced to the following planar dynamical system:

The orbits of the planar dynamical system (2.3) is related to the solutions of equation (1.1) as follows:
The homoclinic orbit and closed orbit of (2.3) corresponding to bell profile solitary wave solution and periodic traveling wave solution of equation (1.1), respectively; A heteroclinic orbit of (2.3) may correspond to a monotone kink profile solitary wave solution or a non-monotone bounded traveling wave solution of (1.1).
Therefore, in order to search for the bounded traveling wave solution of equation (1.1), we just need to investigate the bounded orbits of the planar dynamical system (2.3). To achieve this, we study (2.3) using the theory of planar dynamical systems.51–53
When γ ≠ 0, planar dynamical system (2.3) does not exist any closed orbit or singular closed orbit with finite singular points on the (x, y) phase plane. So, equation (1.1) has neither periodic traveling wave solutions nor bell profile solitary wave solutions as γ ≠ 0.
Proof For ∂P/∂x + ∂Q/∂y = −γ/μv + δ, on the basis of Bendixson–Dulac criterion51–53 Proposition 1 is established when γ ≠ 0.
It is obvious that system (2.3) exists two different singular points P
i
(x
i
, 0) (i = 1, 2) under the conditions assumed of (v − α)2 + 2kβ > 0, in which

The Jacobian matrix of system (2.3) at P
i
(x
i
, 0) (i = 1, 2) are marked as
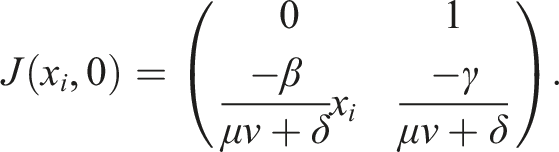
Then the characteristic equations of the linearized system corresponding to (2.3) at P
i
(x
i
, 0) (i = 1, 2) are (1) P2 (x2, 0) is a saddle point. (2) When γ = 0, P1 (x1, 0) is a center (see Figure 1(a)) on account of planar dynamical system (2.3) exists the first integral (3) When γ(μv + δ) < 0, P1 (x1, 0) is an unstable node point (see Figure 1(b)) as Δ1 > 0 and it is an unstable focus point (see Figure 1(d)) as Δ1 < 0. (4) When γ(μv + δ) > 0, P1 (x1, 0) is a stable node point (see Figure 1(e)) as Δ1 > 0 and it is a stable focus point (see Figure 1(c)) as Δ1 < 0. Global phase diagrams. (a) γ = 0, (b) γ(μv + δ) < 0, Δ1 > 0, (c) γ(μv + δ) > 0, Δ1 < 0, (d) γ(μv + δ) < 0, Δ1 < 0, (e) γ(μv + δ) > 0, and Δ1 > 0.
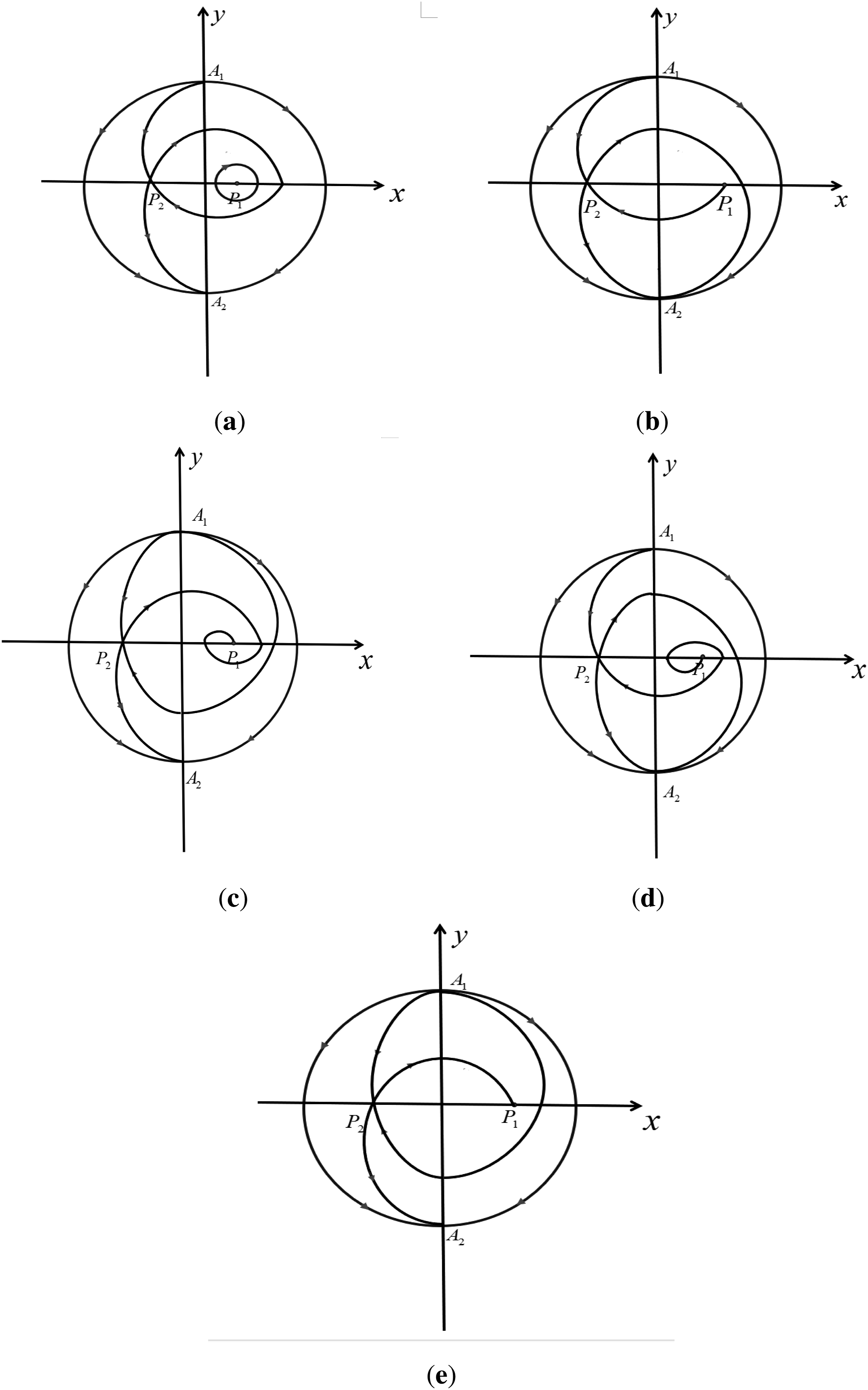


Obviously, there are two singular points A i (i = 1, 2) at the infinity on the y-axis on the basis of the analysis of Poincaré transformation to system (2.3). In which A1 is a souse point on the positive y-axis and A2 is a sink point on the negative y-axis. What is more, the circumference of the Poincaré disc is a singular closed orbit as well.Based on the qualitative discussion, we present the global phase diagrams of planar dynamical system (2.3) in Figures 1(a)–(e).
(i) If γ = 0 and (v − α)2 + 2kβ > 0, then apart from singular points P1, P2 and the orbit L(P1, P1) and L(P2, P2), all non-periodic orbits of (2.3) are unbounded. Furthermore, the coordinate values of the orbits tend to infinity.
(ii) If γ(μv + δ) > 0 (γ(μv + δ) < 0) and (v − α)2 + 2kβ > 0, then except for singular points P1, P2 and orbit L (P2, P1) (L (P1, P2)), all non-periodic orbits of (2.3) are unbounded. Furthermore, the coordinate values of the orbits tend to infinity.
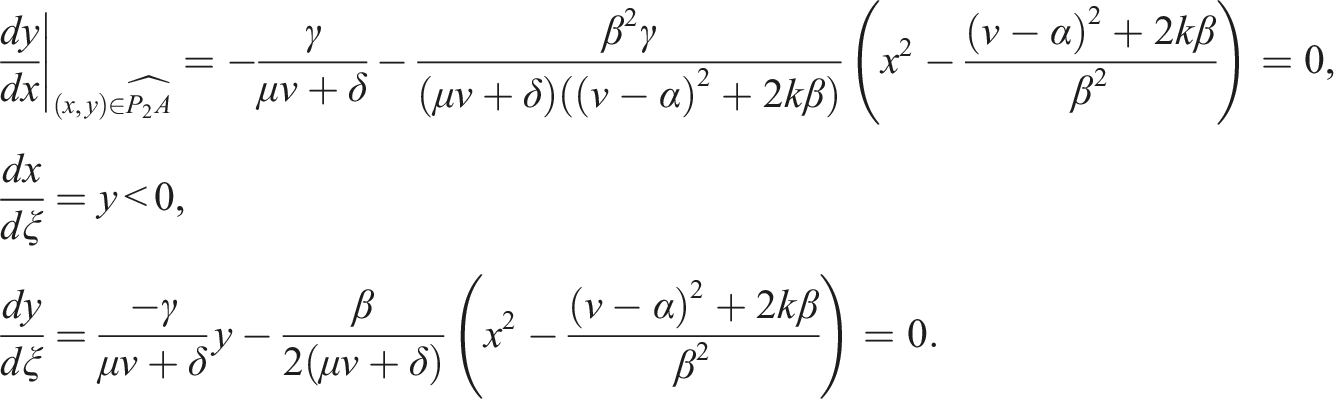
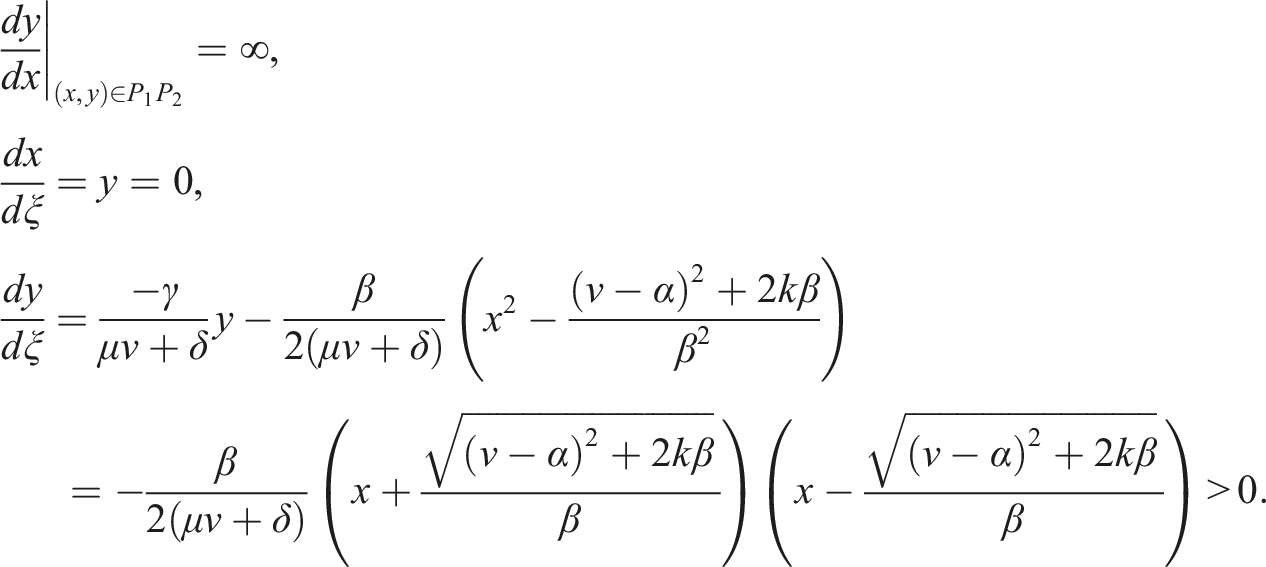
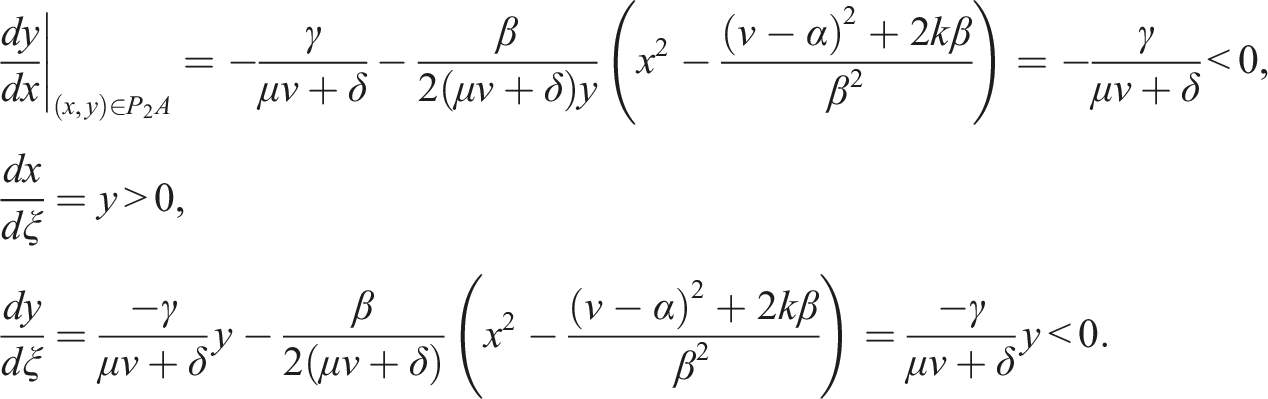
Proof. When (v − α)2 + 2kβ > 0 and γ = 0, it’s not difficult to prove that all non-periodic orbits are unbounded. As a matter of fact, when |ξ| → ∞, these non-periodic orbits tend to either A1 or A2; therefore, the ordinate values of these non-periodic orbits approach infinity as |ξ| → ∞. Suppose that the abscissa values of these orbits are bounded. The tangent slope of the orbits at any point satisfies.

Because of the relationship between (1.1) and (2.3), we establish the following theorem from Proposition 2 and Figures 1(a)–(e).
Assuming that the wave speed v and integral constant k satisfy (v − α)2 + 2kβ > 0.
(i) In the case where γ = 0, there are infinitely many periodic traveling wave solutions and a bell profile solitary wave solution in Equation (1.1) that corresponds to the homoclinic orbit L (P2, P2) in Figure 1(a).
(ii) If γ(μv + δ) > 0 (γ(μv + δ) < 0), then the unique bounded traveling wave solution of Equation (1.1) corresponds to the heteroclinic orbit L (P2, P1) in Figures 1(e) and (c), or corresponding to the heteroclinic orbit L (P1, P2) in Figures 1(b) and (d).
The relationship between the behaviors of bounded traveling wave solutions and the dissipation coefficient
Based on the relationship between (1.1) and (2.3), we can investigate the relationship between the behaviors of bounded traveling wave solutions and the dissipation coefficient γ according to the relationship between the behaviors of bounded orbits of (2.3) and the parameter γ, we construct two theorems as follows.
Hypothesis that the wave speed v and integral constant k satisfy (v − α)2 + 2kβ > 0.(i) If


(i) We just need to prove that U′(ξ) ≠ 0 for all ξ ∈ R on account of the relationship between u(ξ) and U(ξ) as well as u(+∞) < u(−∞) when ξ → ±∞. Notice that if there is ξ0 ∈ R meeting U′(ξ0) = 0, it signifies that there is another intersection point of L(P1, P2) and the x-axis besides P1 and P2. We prove that this is impossible. To begin with, we discuss the vector field (2.3) in the (x, y) phase plane. The secondary curve Namely, l2 is Let B be the intersection point of l1 and l2. It is obvious that its abscissa value x
B
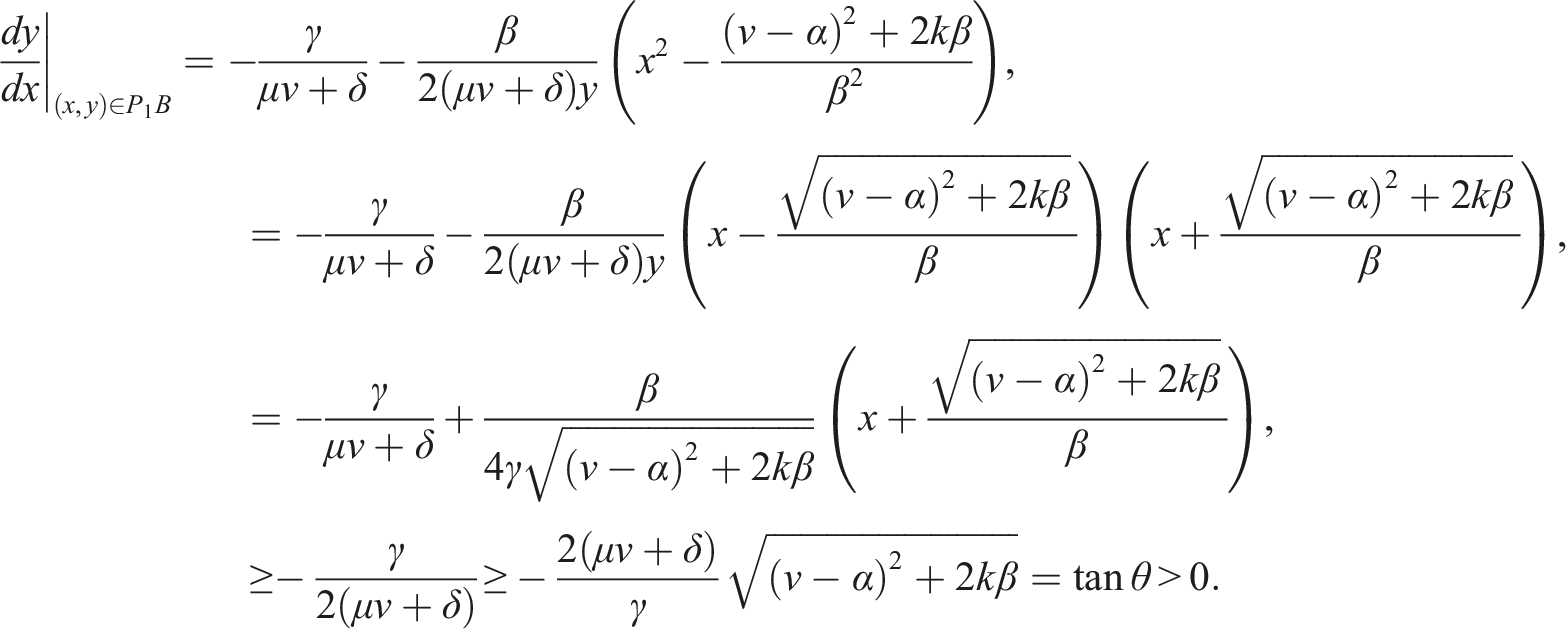
satisfies The closed curve with line segments P2P1, P1B, BA, and secondary curve On the secondary curve Obviously, P2P1 and The equality can be established if and only if x = x1. The above formula indicates that the tangent slope of the orbit passing through segment P1B is greater than that at P1B, except for point P1. Now let us continue to consider the direction of the vector field in P1B as shown below, substituting (3.5) into (2.3), we have So the orbit drills out of the region D as it passes through segment P
1
B (see Figure 2(a)). On the line segment BA We think about account the directions of the vector field on BA Thus, the orbit drills out of the region D when it passes through segment BA (see Figure 2(a)). Figure 2(a) depicts the tangent slope of the orbits of planar dynamical system (2.3) through the line segments P2P1, P1B, BA, and secondary curve




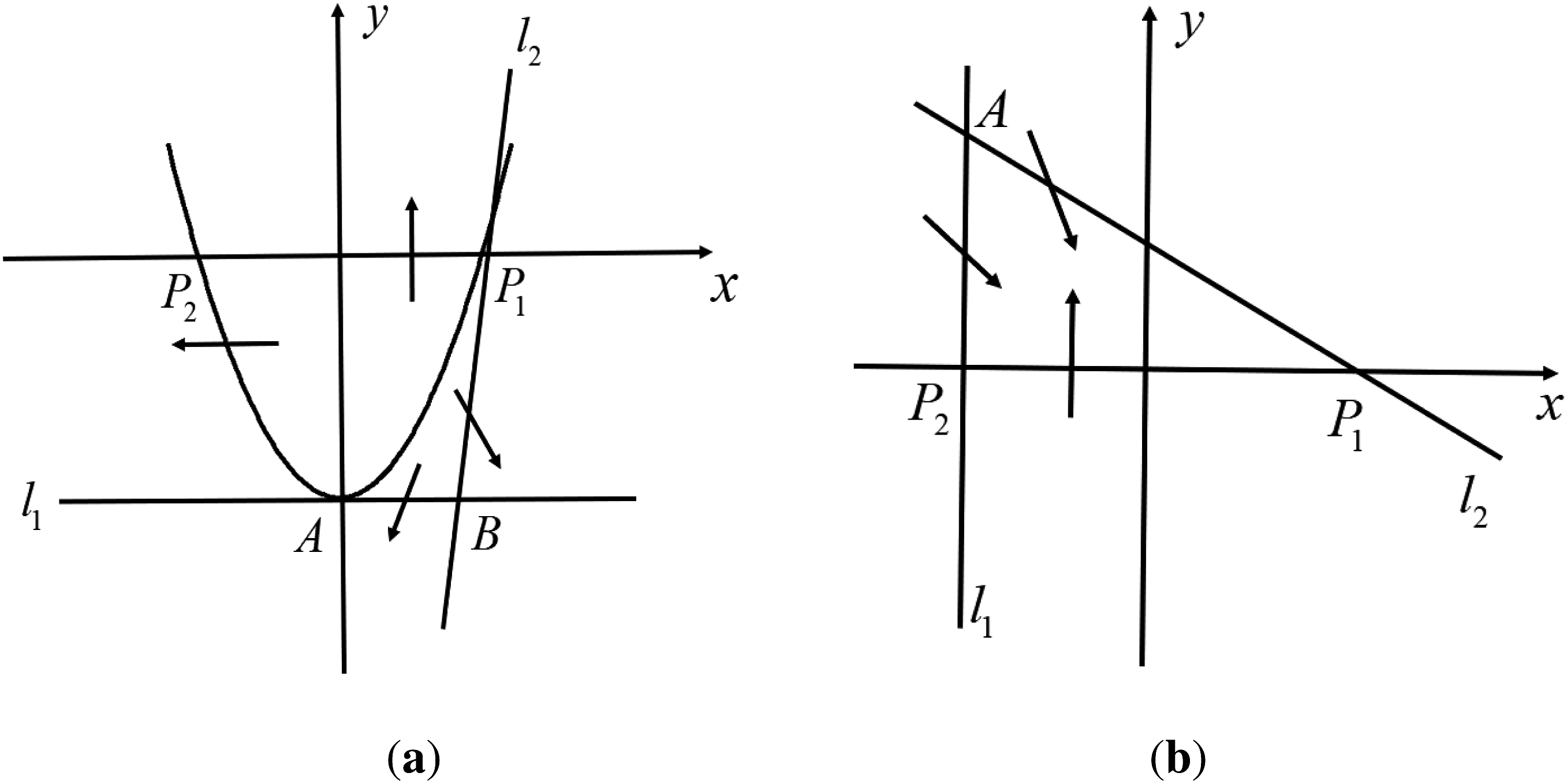
Vector field directions of system (2.3) in (x, y) phase plane. (a) Under the conditions of Theorem 2(i). (b) Under the conditions of Theorem 2 (ii).
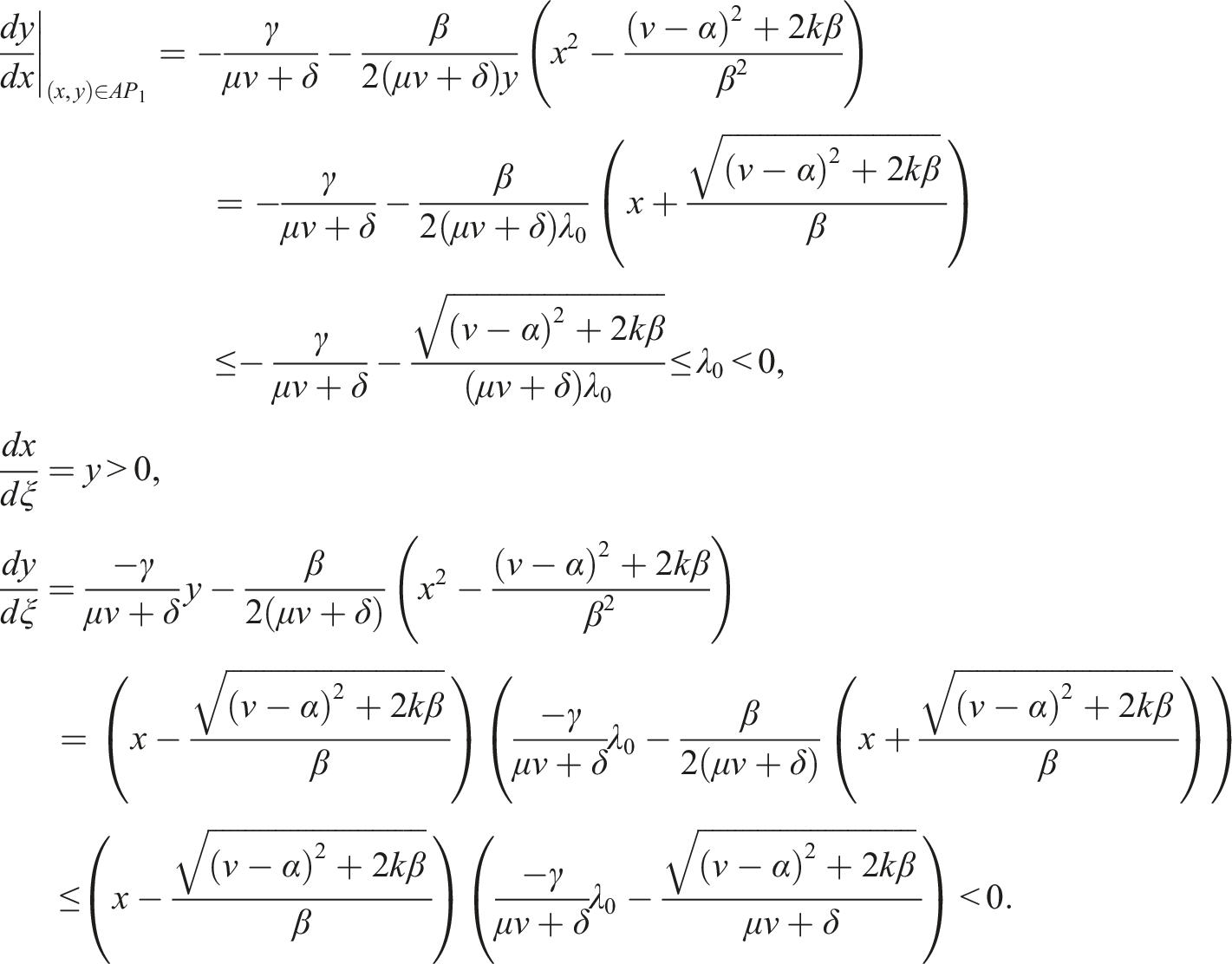
(ii) Similarly, we merely need to demonstrate that the heteroclinic orbit L (P1, P2) does not intersect the x-axis at any point other than P1 and P2. Given the conditions of Theorem 2 (ii), the characteristic equation of planar dynamical system (2.3) at P1 (x1, 0) has two different real roots Thus, there is λ0 ∈ [λ2, λ1], λ0 < 0, so that Then the straight lines l1, l2 and x-axis enclose a triangular region AP1P2 in Figure 2(b). The closed curve made up of the line segments AP1, P1P2, and P2A is non-tangential in general. When system (2.3) is replaced into the coordinate values of points on the line segment AP1, P1P2, and P2A yields On the line segment P1P2 On the line segment P2A Figure 2(b) shows the tangent slope of the orbits of system (2.3) through line segments AP1, P1P2, and P2A. The closed curve is non-tangential due to the presence of line segments AP1, P1P2, and P2A. Thus, we can infer that the heteroclinic orbit L (P2, P1) cannot pass through the region P1AP2. Furthermore, the heteroclinic orbit L (P2, P1) does not present another intersection point with the x-axis besides P1 and P2. Consequently, we explain U(ξ) has monotonically increasing property with the condition of Theorem 2 (ii). And then the monotonically increasing property of u(ξ) can be obtained and formula (3.2) holds.


The hypothesis that the wave speed v and integral constant k satisfy (v − α)2 + 2kβ > 0.
(i) If



(ii) If



We mainly prove that (i) holds. Owing to the fact that the bounded traveling wave solutions u(ξ) of (1.1) and U(ξ) of (2.2) meet u(ξ) = U(ξ) + v − α/β, it is possible to derive the characteristics of the bounded traveling wave solutions u(ξ) of equation (1.1) by investigating the characteristics of the solution U(ξ) of equation (2.2). Based on the consideration in previous section, obviously, P1 and P2 are severally an unstable focus point and a saddle point under the condition of Theorem 3(i). Moreover, the orbit L(P1, P2) tends to P1 spirally as ξ tends to −∞. The intersection points of the orbit L(P1, P2) and x-axis at the right-hand side of P1 corresponding to maximum points of U(ξ), while the ones at the left-hand side of P1 corresponding to minimum points of U(ξ). Consequently, on the basis of the relationship between the equations (1.1) and (2.2), the equations (3.6), (3.7) hold. In addition, as L(P1, P2) tends to P1 sufficiently, its property is close to the property of the linear approximate solution of system (2.3). Thus, the frequency of the orbit rotating around P1 tends to
(ii) could be explained similarly.
Due to the shape and speed of the traveling wave solution stay the same as parallel along the ξ-axis, therefore, we can choose (Color online) Oscillatory damped solution. (a) Corresponding to L (P2, P1) in Figure 1(e), (b) Corresponding to L (P1, P2) in Figure 1(d).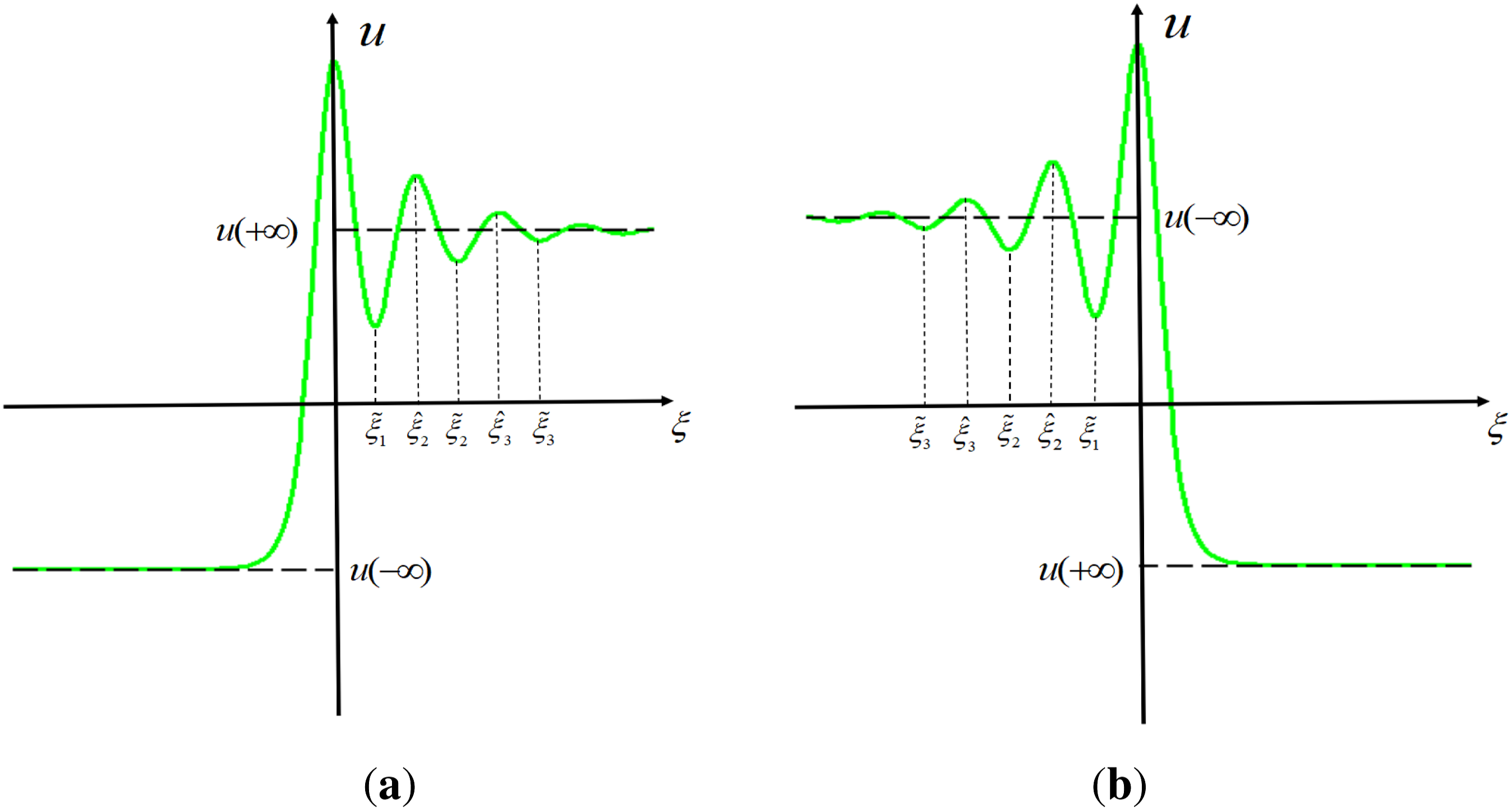
Solitary wave and approximate oscillatory damped solutions
Bell profile solitary wave solution and kink profile solitary wave solution
It is evident follow the preceding explanation that equation (1.1) exhibits a bell profile solitary wave solution as γ = 0. Additionally, the equation (1.1) also admits a kink profile solitary wave solution whenγ ≠ 0. Both the bell profile solitary wave solution of equation (1.1) and the kink profile solitary wave solution satisfying formula (2.2), according to Refs. 54 and 55, with the help of undetermined coefficients method, let’s assume that solutions of the equation (2.2) is

In the formula, a0, a1, a2, ω are confirmed coefficients, ξ0 is an arbitrary real number. By substituting equation (4.1) into equation (2.2), through some simple calculations and reductions, we obtain that a0, a1, a2, and ω are satisfied.

Solving equation (4.2) for γ = 0 and γ ≠ 0, and taking the results into (4.1) yields the following assertion.
The hypothesis that wave speed v and integral constant k meet (v − α)2 + 2kβ > 0, (i) If γ = 0, then Equation. (2.2) exists a bell profile solitary wave solution in the following form


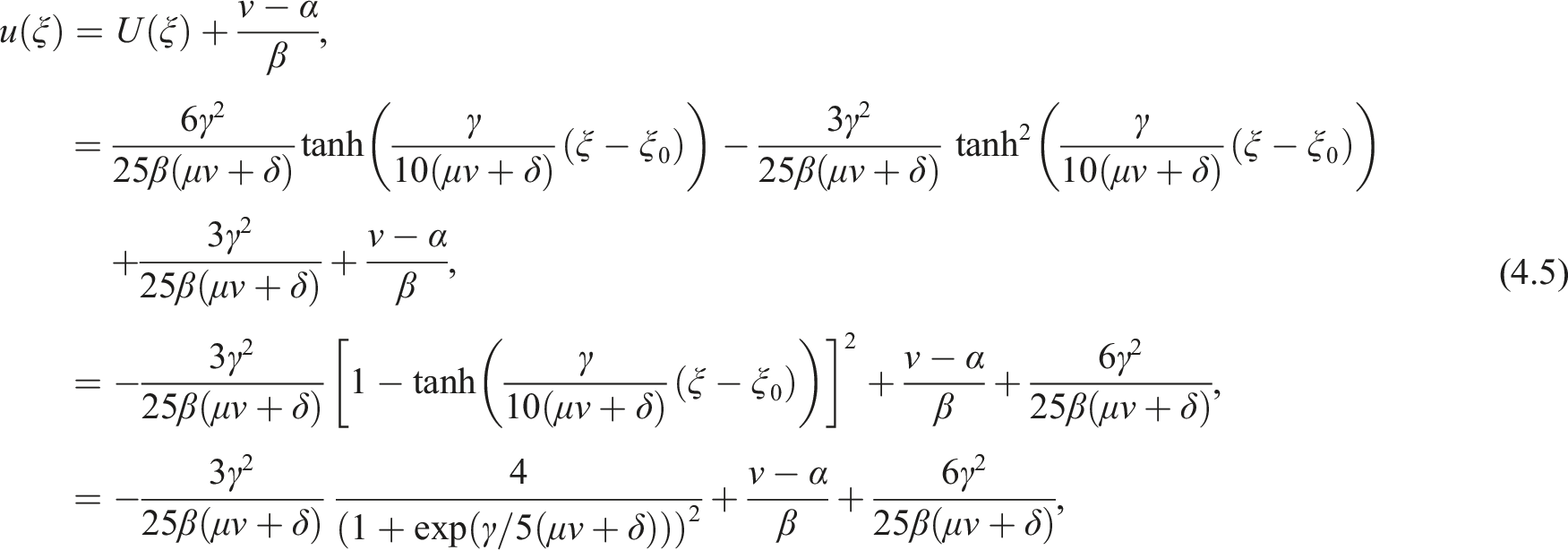

Considering claim (i), if γ = 0, then solving equation (4.2), we obtain It is substituted into formula (4.1), and the results are rearranged to obtain the bell profile solitary wave solution U(ξ) which is consistent with L (P2, P2) in Figure 1(a). After that we certificate deduction (ii). Assuming that Taking it into (4.1) yields the kink profile solitary wave solution U(ξ) which is consistent with L (P1, P2) in Figure 1(b) (γ(μv + δ) < 0) or L (P2, P1) in Figure 1(e) (γ(μv + δ) > 0).


Approximate oscillatory damped solutions
According to assertion 3, as the dissipation coefficient γ as well as the wave velocity v meet



To investigate the approximate oscillatory damped solution of the equation (1.1), certain conditions are required to connect the non-oscillatory part u1(ξ) to the oscillatory part u2(ξ), ξ0 = 0 is taken as the contact point due to the waveform of the solution remain unchanged with translation along ξ-axis. So we choose

It can be known that from (4.12)

When ξ approaches +∞, equation (4.10) approaches C. Paying attention to that (4.10) in accordance with the oscillatory part of the oscillatory damped solution and that the heteroclinic orbit L (P2, P1) tends to (D1, 0) as ξ → +∞. As a result, we get

The value of A1 cos (B (ξ − ξ0)) − A2 sin (B (ξ − ξ0)) + C has nothing to do with the value of B. So, it can be assumed that B > 0, according to (4.13), we can obtain

Then, we get the following theorem.
Assume wave speed v and integral constant k fulfill the inequality (v − α)2 + 2kβ > 0. (i) The hypothesis that v and dissipation coefficient γ meet
(ii) The hypothesis that v and the dissipation coefficient γ meet
Error estimates for approximate oscillatory damped solutions
In this section, in order to investigate errors between exact oscillatory damped solution in accordance with L (P2, P1) and approximate oscillatory damped solutions (4.17), we take Figure 1(c) as an example.
Assuming that D1 = v − α/β + x1, D2 = v − α/β + x2, then substituting



Suppose that W1(ξ) and W2(ξ) are solutions of


Hypothesis that W3(ξ, τ) is a solution of

It is clear that the solution of (5.4) exists the following form

It is obvious that the solution of (5.8) has the following form

Therefore, the solution of equation (5.6) can be easily found as follows


Furthermore, based on the Proposition 3, the solution of (5.2) can be easily obtained

Based on (5.1) and (5.12), then the oscillatory damped solution of (1.1) satisfying the condition (5.3) that can be established



According to the Gronwall inequality, the above formula can be reduced to


We can infer that the error between the exact oscillatory damped solution corresponding to L (P2, P1) and the approximate oscillatory damped solution equation (4.17) is less than

Thus, (4.17) is significant as an approximate solution of (1.1) while the conditions in Theorem 4(i) are established. In a similar way, we can build up the integral relationship between the implicit exact damped oscillatory solution and approximate damped oscillatory solution corresponding to L (P1, P2) by the virtue of constant variation method.
We take γ = 0.5, 1, 2, as shown in Figures 4–6. To explain the effect of dissipation coefficient γ about oscillatory damped solution, the following parameter values are taken to satisfy the condition of Theorem 5(i) as v = 3, α = 1, k = −1/2, β = 3, μ = 1/3, δ = 1. Meanwhile, the critical value in Theorem 5(i) is (Color online) Approximate oscillatory damped solution of the equation (1.1) with γ = 0.5. (Color online) Approximate oscillatory damped solution of the equation (1.1) with γ = 1. (Color online) Approximate oscillatory damped solution of the equation (1.1) with γ = 2.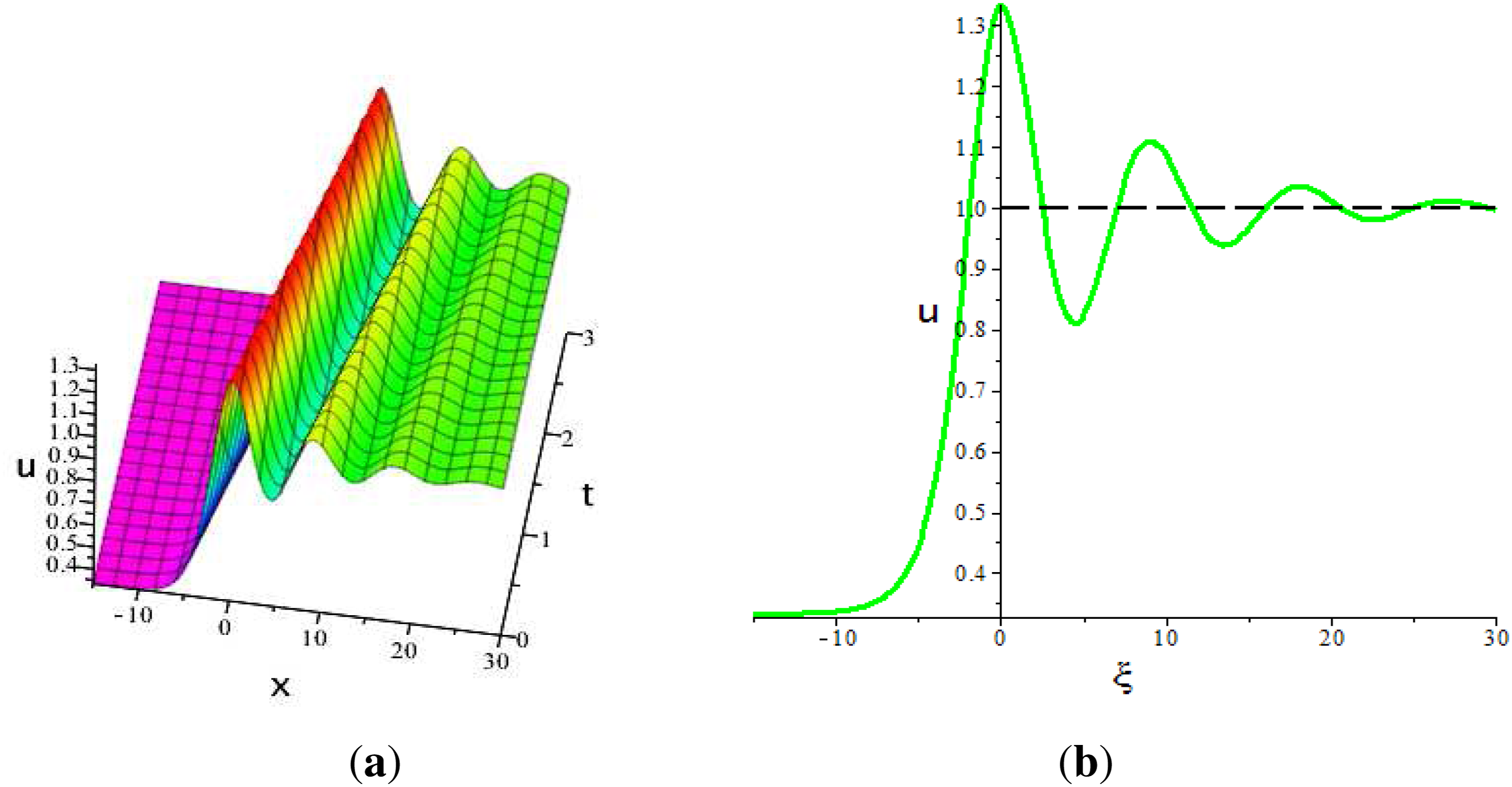
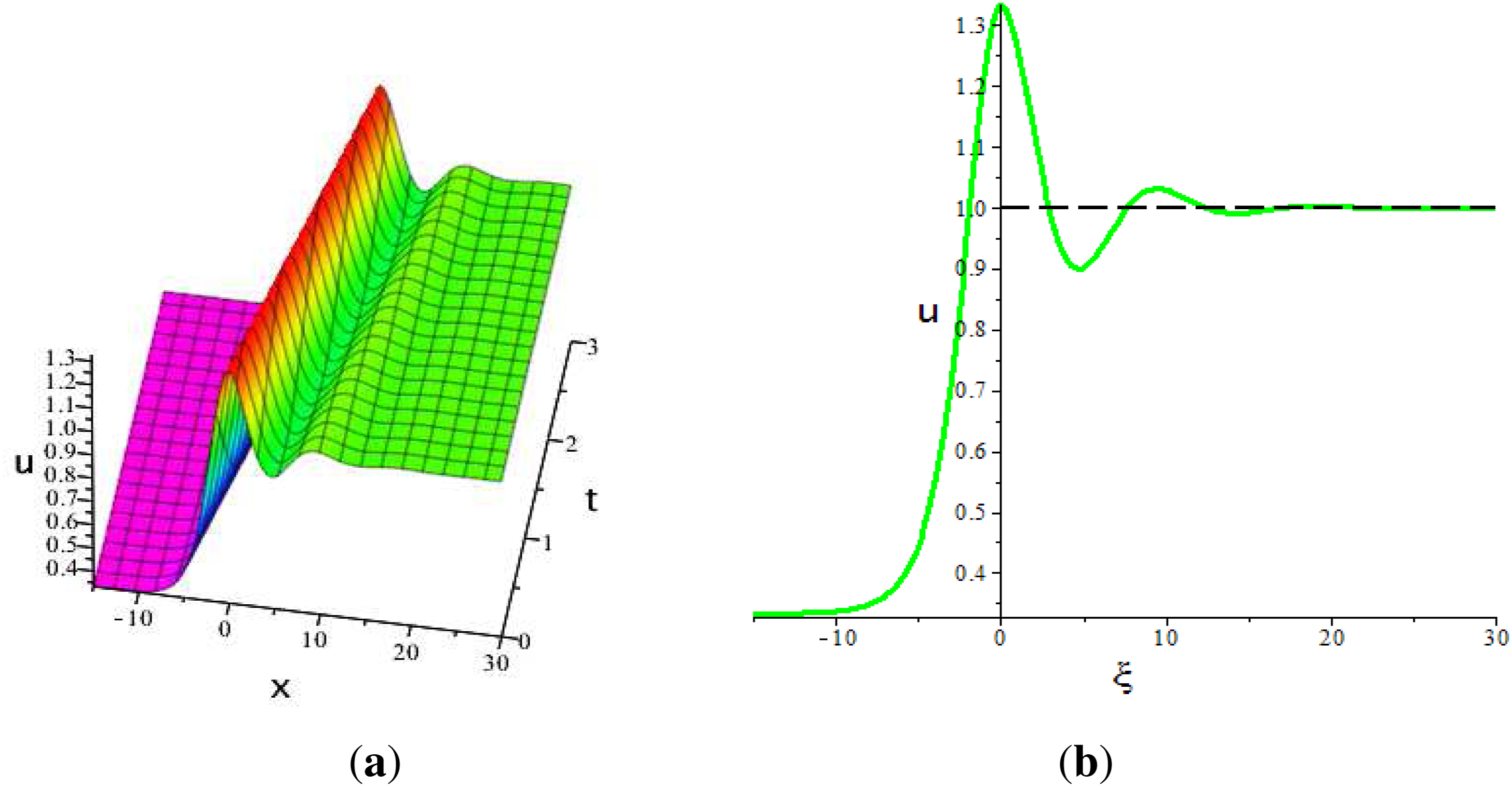
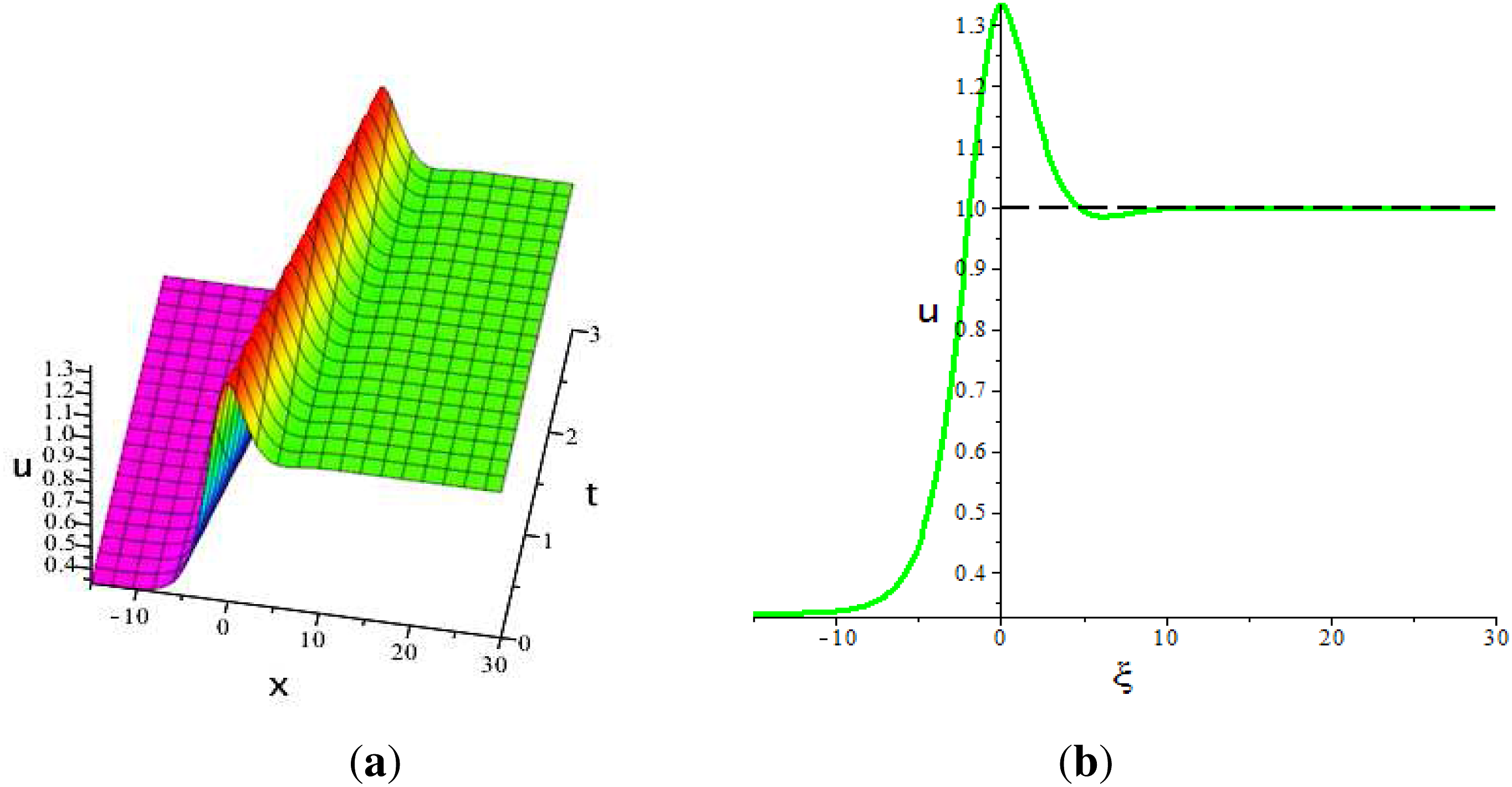
When


It is noticed that bigger γ2 create lower vibration frequencies ω, whereas smaller γ2 produce greater vibration frequencies ω. Increasing γ2 results in a longer time T, whereas decreasing it results in a shorter period T. It is consistent with Figures 4–6. Using (4.3) and (4.17), we discovered that the coefficient β in the nonlinear term influences the amplitude of bounded traveling wave solutions. The amplitude of solutions decreases as β increases, and increases as β decreases.
Conclusion and prospect
Summary of this paper
In this paper, we have applied the theory of planar dynamical systems to execute comprehensive qualitative analysis for bounded traveling wave solutions of the KdV-BBM-B equation. We have also studied the existence conditions of bounded traveling wave solutions for equation (1.1) and the relationships between the behaviors of these solutions and the dissipation coefficients. And then, in some conditions, we have obtained its exact bell profile solitary wave solutions and kink profile solitary-wave solutions. An exact solution can be employed not only to check whether the methods of numerical analysis and approximation are good but also for quantitative analysis. So, it is significant to investigate exact solutions in theoretical and applied research. Beyond that we have also got the approximate damped oscillatory solutions of equation (1.1) and presented the error estimates. It is very significant to show error estimates, or else it would be considered unreliable in applied physics and mechanics. It should be pointed out that this paper has presented a method of finding the approximate damped oscillatory solutions to nonlinear evolution equations with the dissipation effect. Finding out the error estimate is the difficulty of this article, the reason is that we only know the approximate damped oscillatory solutions without its exact solutions. To overcome it, we have used some transformations and the idea of homogenization principle. Furthermore, we have established the integral equation reflecting the relation between the exact and approximate damped oscillatory solutions, and give error estimates for the approximate solutions. The errors are infinitesimal decreasing in exponential form.
Novelty of this paper
a. Previous studies on traveling wave solutions of equations mainly used the hypothesis undetermined method and the homogeneous equilibrium method. In this paper, all the bounded traveling wave solutions of the equation are studied in detail by using the theory and method of plane dynamic system; b. In this paper, the effect of the dissipation effect on the solution state of the equation is studied. At the same time, we give the critical value or value interval to characterize the magnitude of the dissipative action, and point out the range in which the dissipative coefficient changes, the bell-like solitary wave solution, the torsional solitary wave solution or the attenuation oscillation solution will appear in the equation; c. According to the evolution relationship of the solution orbits corresponding to the attenuated oscillation solutions in the phase diagram, we know that the generation of the attenuated oscillation solutions is essentially generated by the corresponding homologous or alien orbital rupture under the action of the dissipative term. Therefore, the structure of the attenuated oscillation solution is successfully designed on the basis of the exact bell or twisted solitaire solution of the equation without dissipative action, and the approximate solution of the attenuated oscillation solution is obtained by using the hypothesis undetermined method; d. In order to ensure the rationality of the approximate solution of the attenuated oscillation solution, we obtained the error estimate of the approximate solution of the attenuated oscillation solution of the equation by establishing an integral equation reflecting the relationship between the approximate solution and the exact solution according to the idea of the homogenization principle. It can be seen from the error estimate that the error is an infinitesimally small amount that decreases rapidly in exponential form.
Prospects for future research work
Nonlinear wave equation is an important mathematical model to describe natural phenomena, and it is also an important hot topic in the study of soliton theory. Although this paper has made some theoretical progress in the study of nonlinear wave equations, nonlinear science is still a young subject after all, and there is still a lot of work to be studied further. Here, only a few aspects related to this paper to do the outlook, the specific work to be carried out as follows: a. Nonlinear wave equation is a very active research field, especially the study of its corresponding dynamic behavior, but in reality, the model describing nonlinear wave equation is often affected by external forces, especially random forces; Moreover, for nonlinear wave equations, we generally analyze the bifurcation of the system solution and the corresponding solution structure through different integral processes, but the actual system may not only have parametric disturbances but also system structure disturbances. These structural disturbances may be linear (such as viscous damping term) or nonlinear. They sometimes have an essential effect on the phase diagram of the system. In view of the above problems, work on perturbation effects is planned. b. So far, only the theory and methods of planar dynamical systems have been used to study conservative systems or dissipative systems with low order nonlinear terms. With the development of soliton theory, coupling and high-dimensional nonlinear equations have become a hot topic. Many practical models can be reduced to coupling and high-dimensional nonlinear equations. For nonlinear systems with both high-order nonlinear terms and dissipative effects, we can see that there are few papers on this research. Therefore, we need to continue to deepen and develop the research of coupled, high, and discrete nonlinear equations, which will be one of the future research directions.
Footnotes
Author contributions
All authors contributed to the study conception and design. Software and Visualization were performed by Yao-Hong Li, Shou-Bo Jin and Pan-Li Ma. The first draft of the manuscript was written by Chun-Yan Qin and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Foundation of Anhui Provincial Education Department (Grant No. 2022AH040207, 2023AH040310, 2023AH052488, KJ2021A1102) and the Foundation of Suzhou University (Grant No. 2021XJPT40, 2024yzd19, XJXS03).