
Abstract
Taking a permanent magnet synchronous motor as the research object, the effect of air gap eccentricity fault on the vibration response characteristics of the motor rotor is analyzed through theoretical calculations, numerical simulation and finite element simulation. First, the change of air gap magnetic field under air gap eccentricity fault is analyzed, and then further calculated to obtain the unbalanced magnetic force under air gap fault by the expression of air gap magnetic field, at last, the rotor’s vibration response characteristics under the action of unbalanced electromagnetic force are obtained by the Newmark- β calculation method. Detailed analysis of the effects of eccentricity distance, eccentricity angle and motor pole-pair number on motor rotor vibration. Finally, the synchronous motor eccentricity fault model is built in ANSYS Maxwell electromagnetic simulation software, and the change characteristics of rotor unbalanced magnetic force after eccentricity fault are calculated and the results are consistent with the theoretical calculations.
Introduction
Synchronous motor is the common rotating machine in power systems. As a result of manufacturing, assembly, operation, and other factors, the air gap around the motor may be uneven from side to side. This is known as air gap eccentricity. 1 In the actual operation of power systems, air gap eccentricity faults can affect the normal operation of rotating machinery system. Eccentricity faults lead to distortions in the air-gap magnetic field, and the resulting unbalanced magnetic forces can lead to abnormal vibration of the rotor system, and severe eccentricity faults can even lead to rotor-stator friction. 2 There will be no significant impact on the motor’s normal operation if the air gap eccentricity is slight, 3 but it is considered that the fault standard is attained when the eccentricity reaches 10%, 4 and it is necessary to protect the bearings and winding insulation from damage by maintaining vibration stability of the shafting. 5 Therefore, the study of unbalanced electromagnetic forces and its vibration response of the rotor system after eccentricity failure has very important significance for the operation and maintenance of synchronous motors.
For the air gap eccentricity fault, there have been a large number of studies at home and abroad, mainly focusing on rotating motors such as turbine generators, asynchronous motors, etc. Rosenberg 6 earlier proposed the air gap eccentricity diagnosis, causes and preventive maintenance. Yulin He et al 7 investigated the change of stator vibration signals after the occurrence of eccentricity fault in a generator. LI Heming et al 8 study the effects of the degree of eccentricity and the angle of eccentricity on the unbalanced electromagnetic force. The rotor force characteristics of the turbine generator under dynamic eccentricity fault and the rule of change were obtained.
Unbalanced magnetic force is the main cause of abnormal vibration of synchronous motor rotor. 9 According to Wenjuan Dang et al, 10 unbalanced magnetic force can be derived from dynamic and mixed air gap eccentricities, as a result, they obtained the rotor’s dynamic response at different rotation speeds, different mass eccentricities, different static eccentricities distance and different static eccentricity angles. Ertuan Yue et al. 11 examined the influences of mass eccentricity and static eccentricity on the vibration characteristics of a rotor under unbalanced magnetic tension. Xueping Xu et al. 12 investigated the influence of unbalanced magnetic force on rotor rub impact faults. The probability of rotor rub impact decreased with the increase of motor pole pairs. Shuting Wan et al. 13 used the SDF-9 generator as a research object to analyze the radial vibration response of its rotor after eccentricity failure.
Currently, there are fewer studies on the unbalanced magnetic force after air gap eccentricity faults and the corresponding rotor vibration response. In this paper, a permanent magnet synchronous motor is taken as the research object, firstly, according to the change characteristics of the air gap magnetic field after the rotor eccentricity fault, and theoretically analyze the unbalanced electromagnetic force to which the rotor is subjected after the eccentricity fault. Then we analyze the vibration characteristics of the rotor under the unbalanced magnetic force through the Newmark-β calculation method, and finally establishes the simulation model of synchronous motor eccentricity fault through the Maxwell software, which is the simulation model of the theoretically deduced Simulation verification of the theoretically derived results.
Theoretical calculation
Theoretical calculation
In order to calculate the air gap magnetic density during rotor eccentricity failure, it is necessary to multiply the air gap magnetic potential by the air gap permeability. 14 Then, according to Maxwell’s equation, the unbalanced electromagnetic force applied to rotor after eccentricity is obtained.
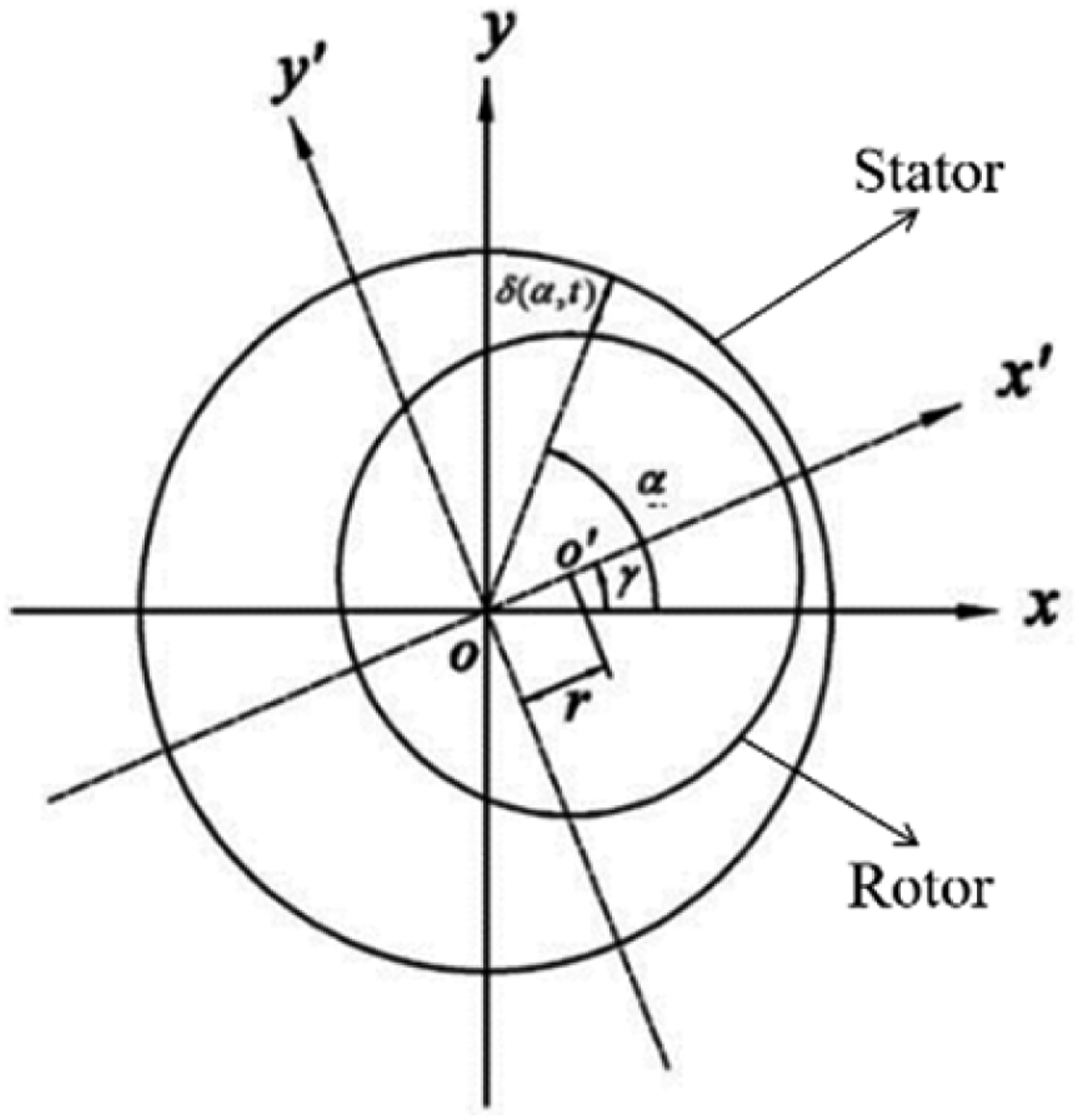
When there is no eccentricity, the length of the air gap along the circumference of the rotor is a constant, which we record as t - time, s; r - the eccentricity of the rotor, mm; Air gap under eccentric rotor of motor.

After Fourier expansion of the permeability expression, the expression is given as follows


A motor’s air gap magnetic potential is as shown in the following equation (4)

There are odd octave components in the air-gap potential which amplitude decreases with increasing order, so the higher-order component has little impact on the rotor system. In order to facilitate the calculation, this paper chooses to ignore the higher harmonic of the magnetic potential. After that, the expression for the magnetic density of the motor is shown in equation (5)

Based on the calculated air gap magnetic density expression (5), the electromagnetic force is further calculated. The unbalanced electromagnetic force on the rotor is shown in equation (6)

By integrating the rotor surface’s electromagnetic force per unit area around its circumference, the electromagnetic force can be decomposed into two components in the X and Y directions. The expression is shown as follows
With the increase of the order, the air-gap permeance component decreases continuously, and the air-gap permeance component beyond the fourth order can be ignored. Therefore, permeance of the air-gap is obtained by using the first four orders of the Fourier expansion coefficient. At this point, the expression for the unbalanced electromagnetic force components in the X and Y directions is denoted by equation (8)
From equation (8), the unbalanced magnetic force consists of two parts, one of which is time independent, and its amplitude is


Rotor dynamics equation
The Jeffcott model is adopted for the rotor. Rotor shafts are assumed to have no mass, the central disc has a concentrated mass of m, a stiffness coefficient of k, and a damping coefficient of c. the gyro effect of the rotor is ignored.
Then the dynamic equation of the rotor can be expressed as equation (9)

The parameters used are as follows:
m = 24.2 kg, c = 1000 Ns/m, k = 1.526 × 106, L = 0.1 m, R = 49.5 mm , e = 0.4 mm,
Bring equation (8) into equation (9), Via Newmark-β, the dynamic response of the rotor can be obtained. Take Newmark-β coefficient in,
Analysis of rotor vibration characteristics under unbalanced magnetic force
Analysis of vibration characteristics of rotors with different eccentricities
In this paper, the rotor relative eccentricity

By comparing different relative eccentricities
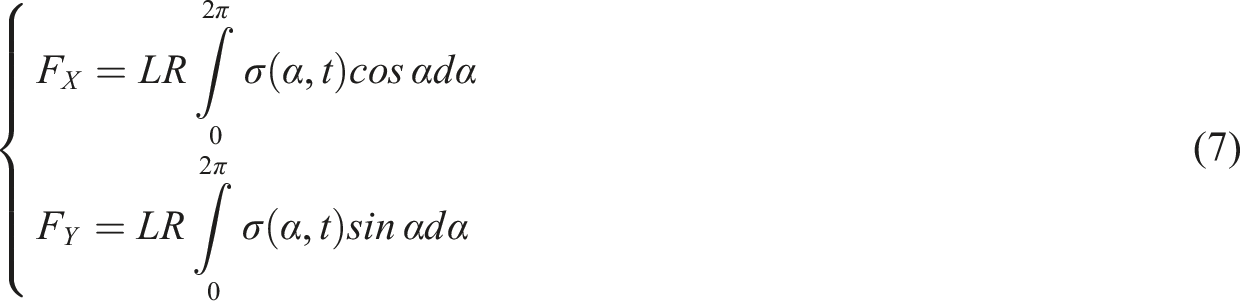
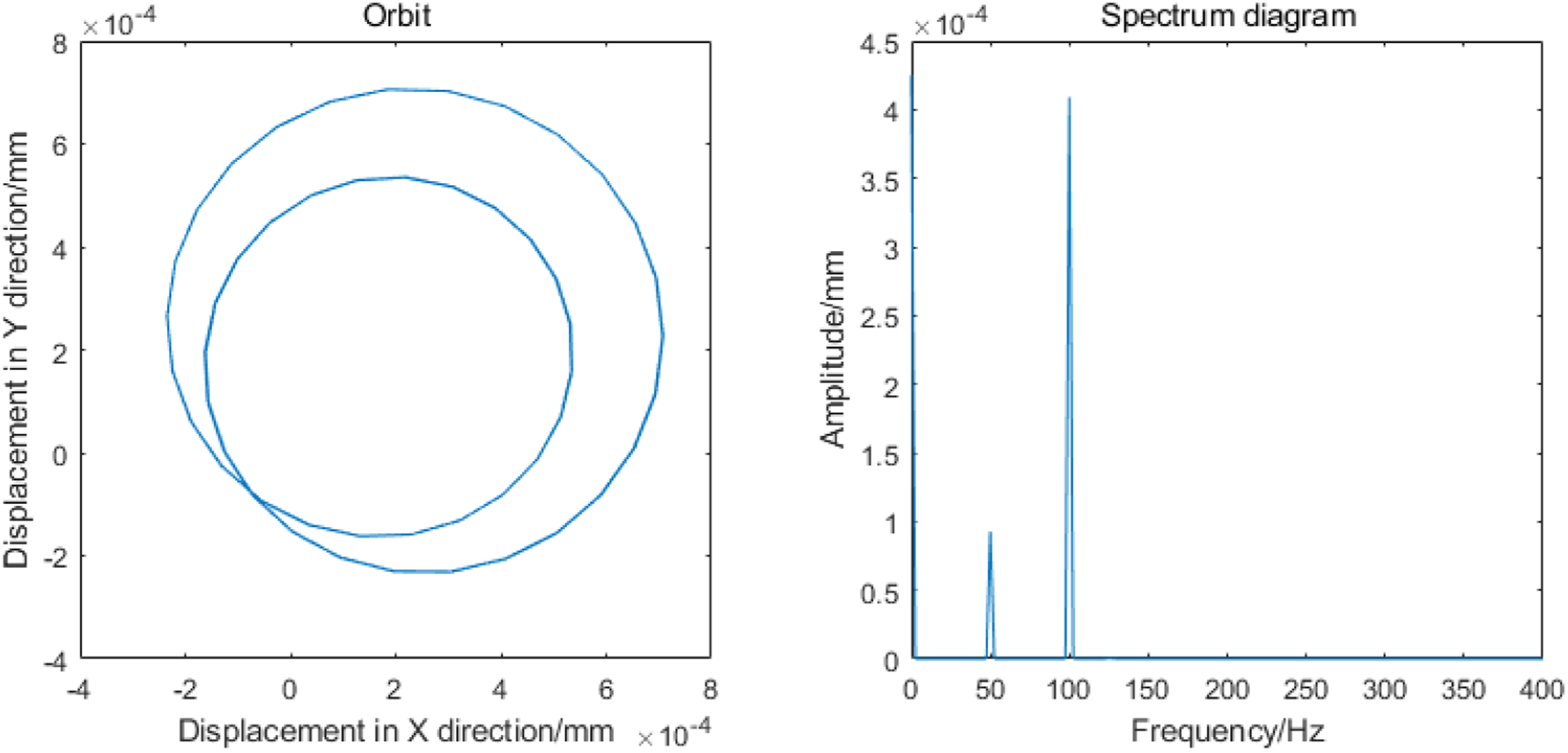
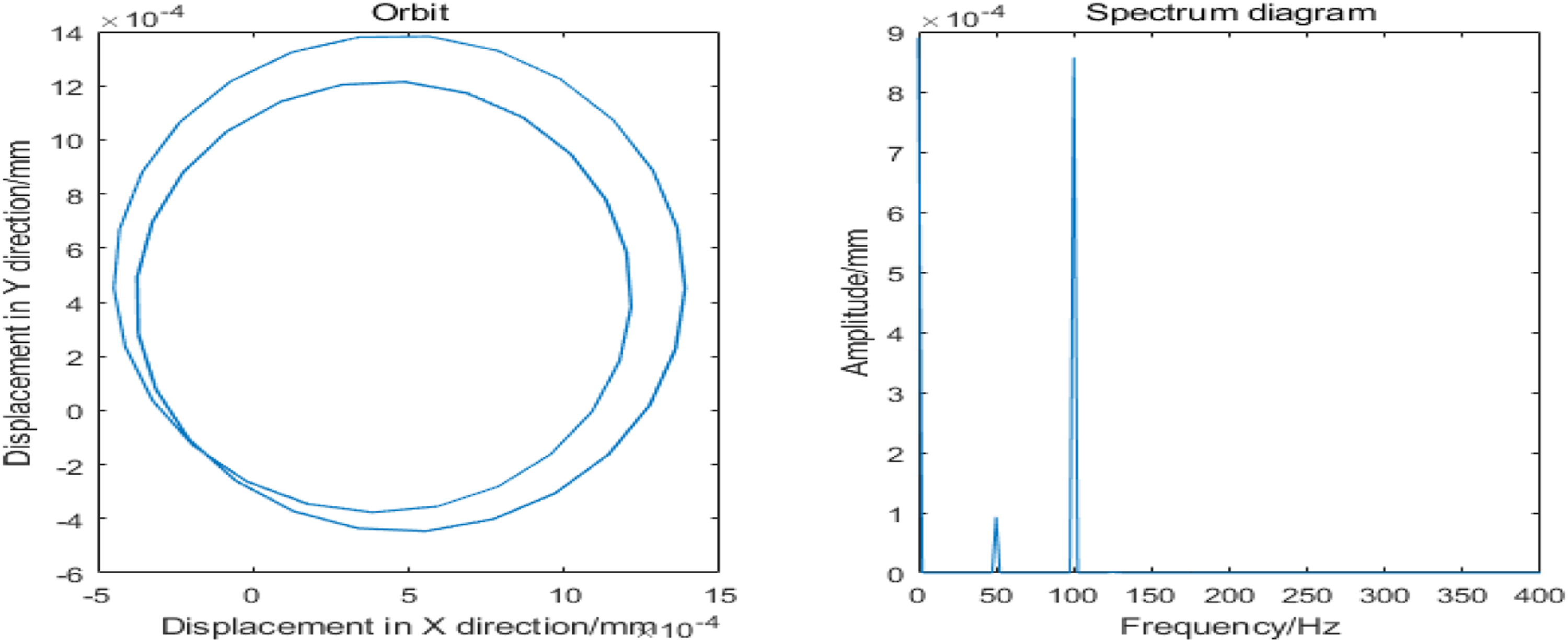
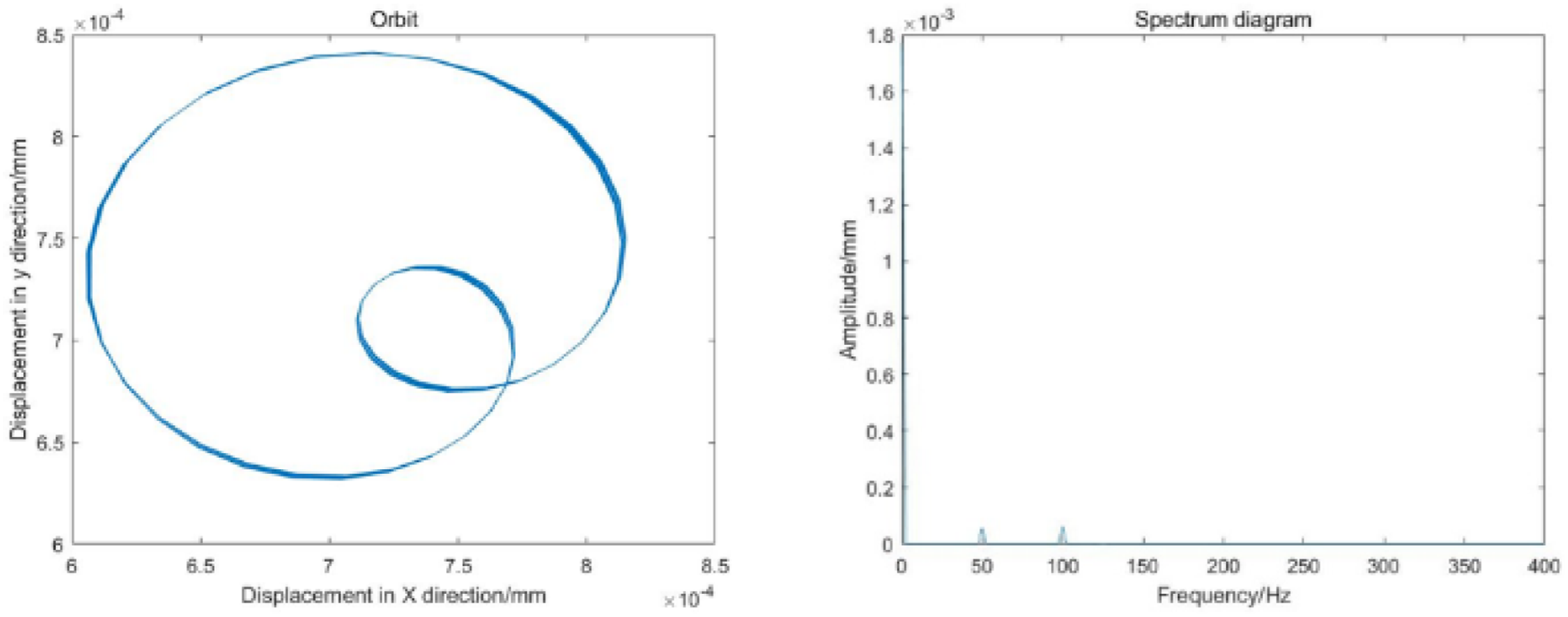
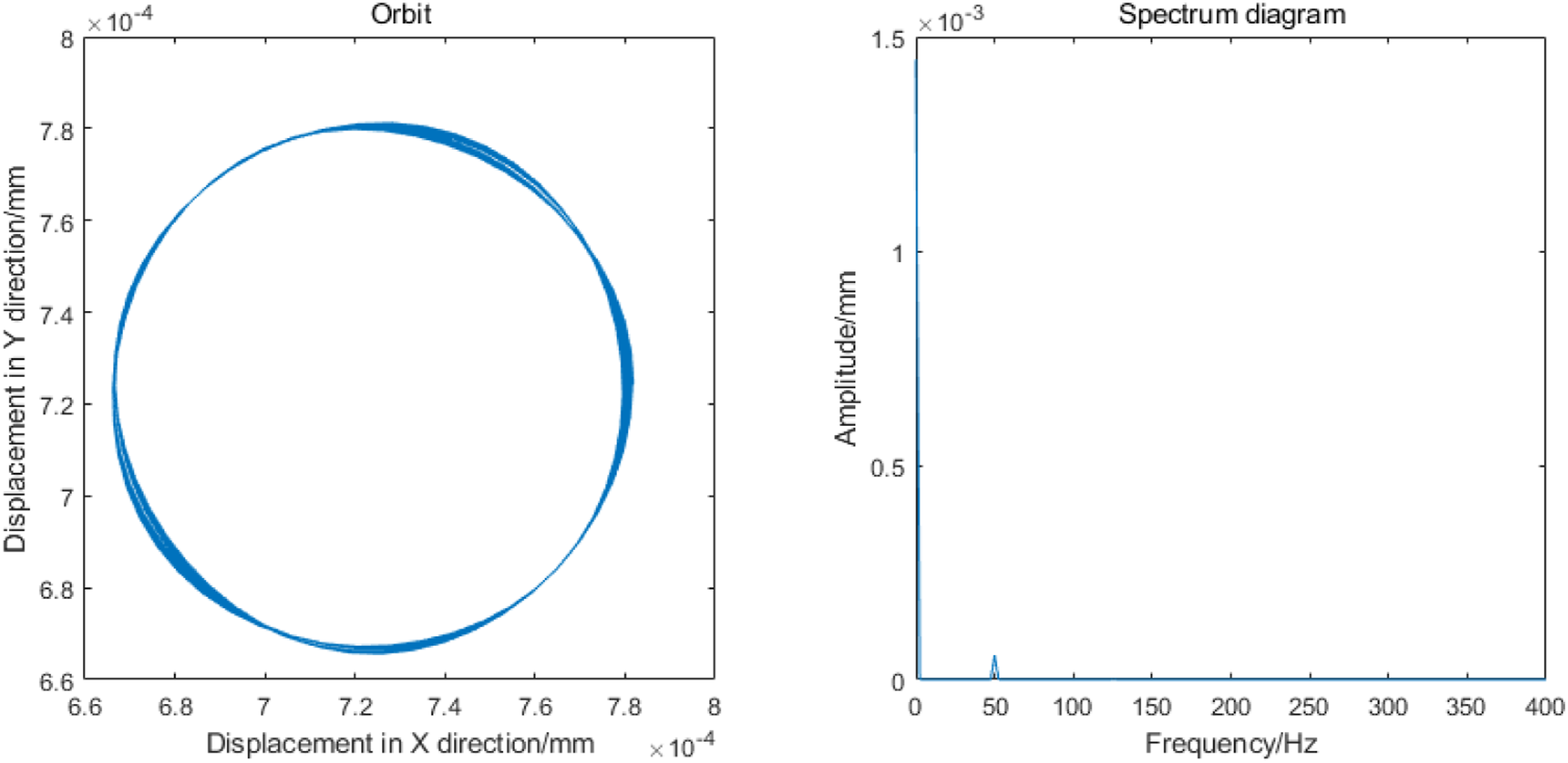
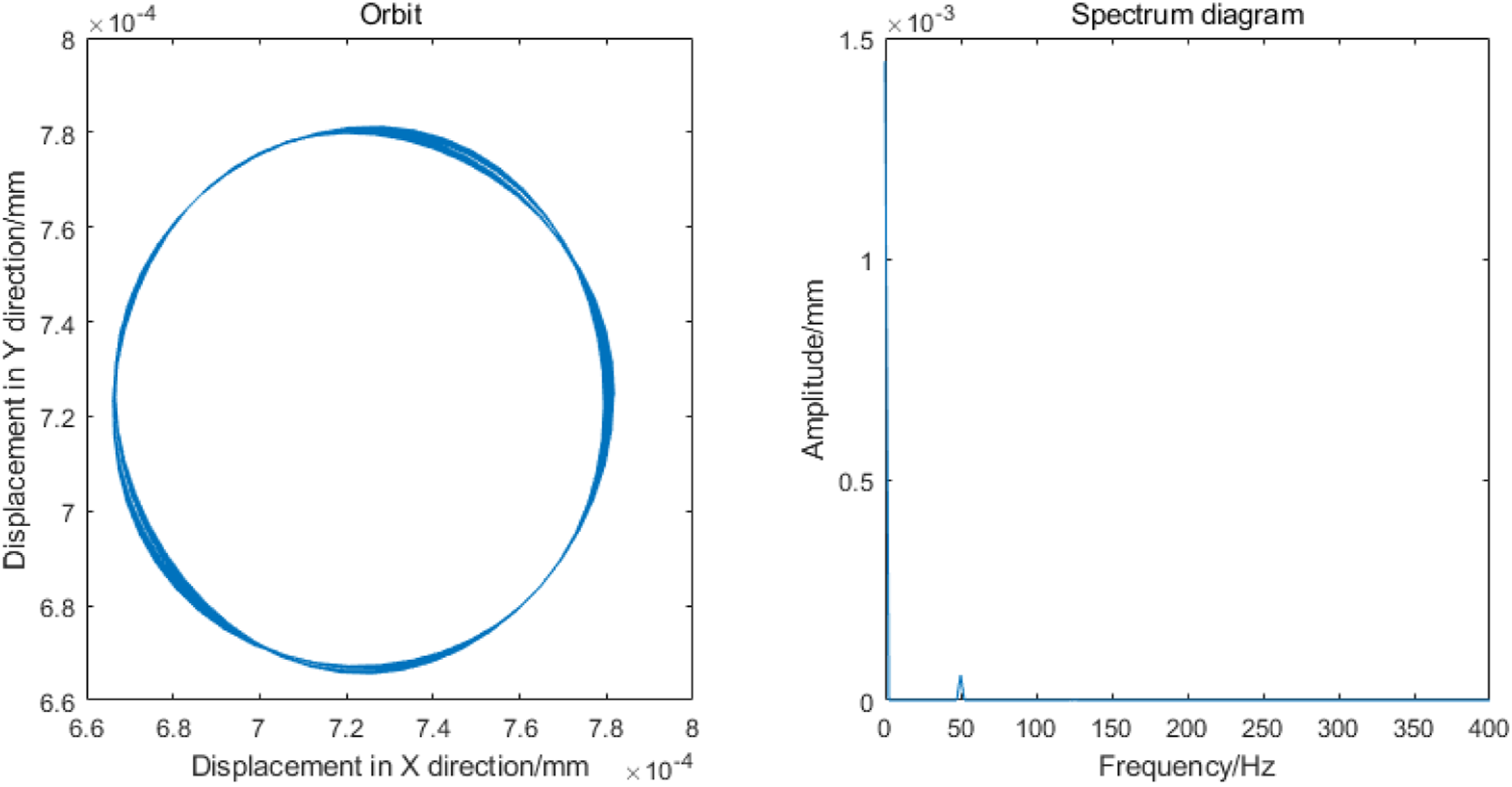
By studying the frequency domain and axis locus of the rotor under different relative eccentricity, (Figure 2–5) evidently, that when eccentricity occurs, the frequency domain diagram is dominated by zero frequency, fundamental frequency, and double frequency. When eccentricity faults in the system are exacerbated, the relative eccentricity rises, the amplitude of double frequency and zero frequency representing the unbalanced magnetic force increases continuously. When eccentricity faults in the system are exacerbated, the relative eccentricity rises, then version component formed by the centrifugal force is greater than the double frequency component of the unbalanced magnetic force. When the relative eccentricity is greater than 0.03, the frequency doubling component exceeds the frequency conversion component. The orbit diagram of the shaft center is in the form of an outer ring and an inner ring. With the increase of the relative eccentricity, the inner ring keeps increasing. Orbit and Spectrum diagram. When ε= 0.02. Orbit and Spectrum diagram. When ε= 0.03. Orbit and Spectrum diagram. When ε= 0.1. Orbit and Spectrum diagram. When ε= 0.2.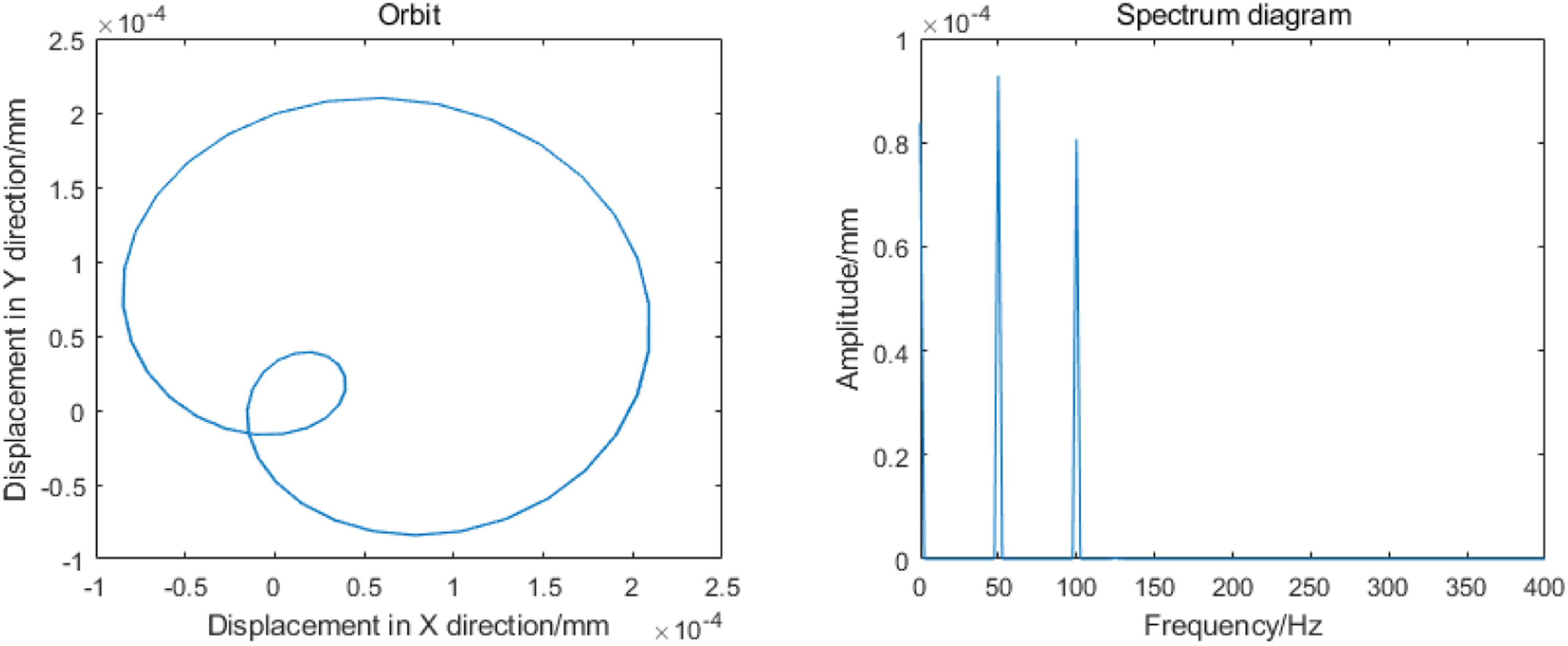
Analysis of rotor vibration characteristics under different pole pairs of motor
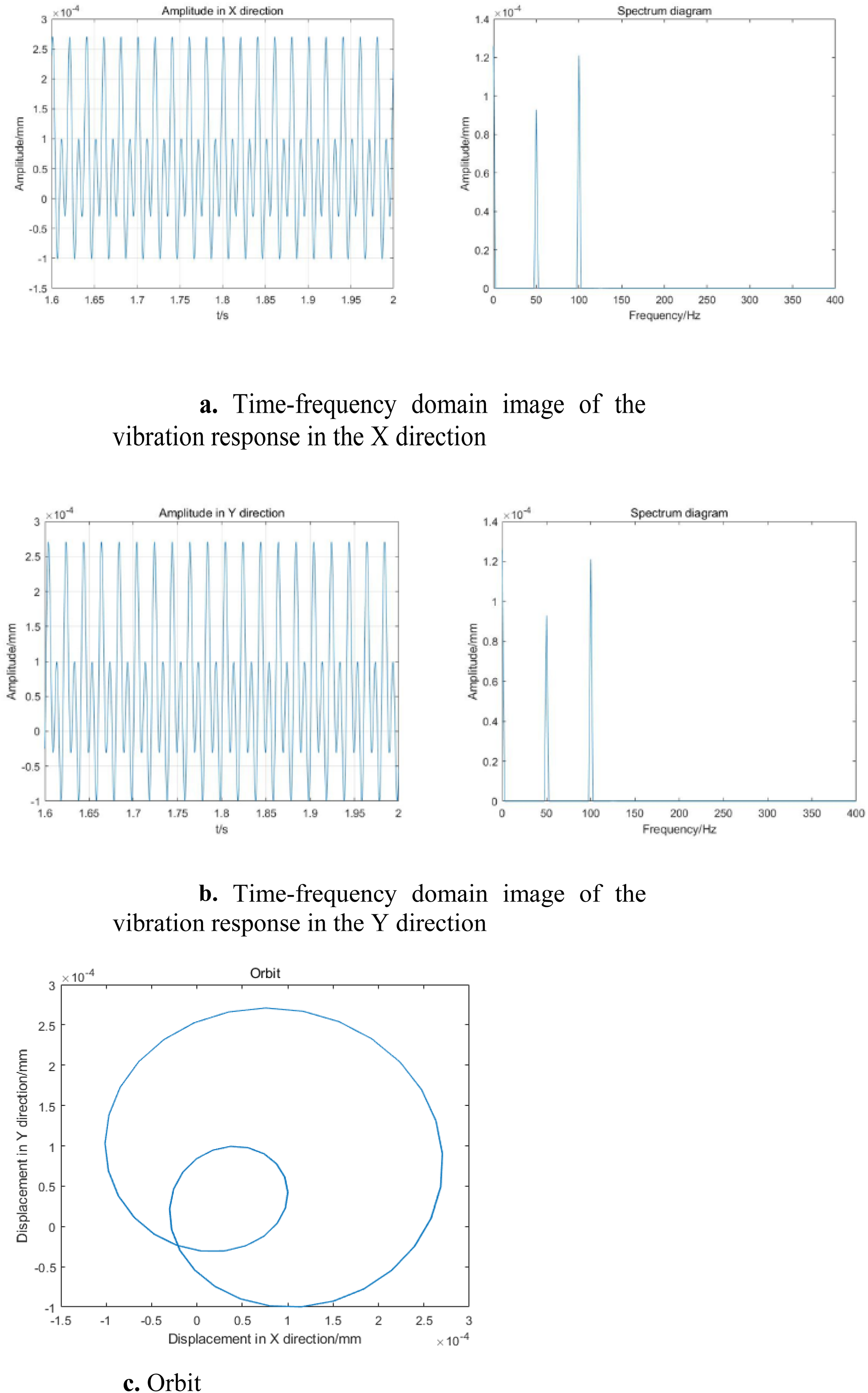
Under different motor pole pairs, the rotor dynamic equations can be solved to obtain the vibration response. In order to clearer compare the influences of different motor pole pairs on the motor rotor vibration response, this paper selects a larger relative eccentricity Orbit and Spectrum diagram. When the motor pole pairs P are 1 pair of pole. Orbit and Spectrum diagram. When the motor pole pairs P are 2 pair of pole. Orbit and Spectrum diagram. When the motor pole pairs P are 3 pair of pole. Orbit and Spectrum diagram. When the motor pole pairs P are 4 pair of pole.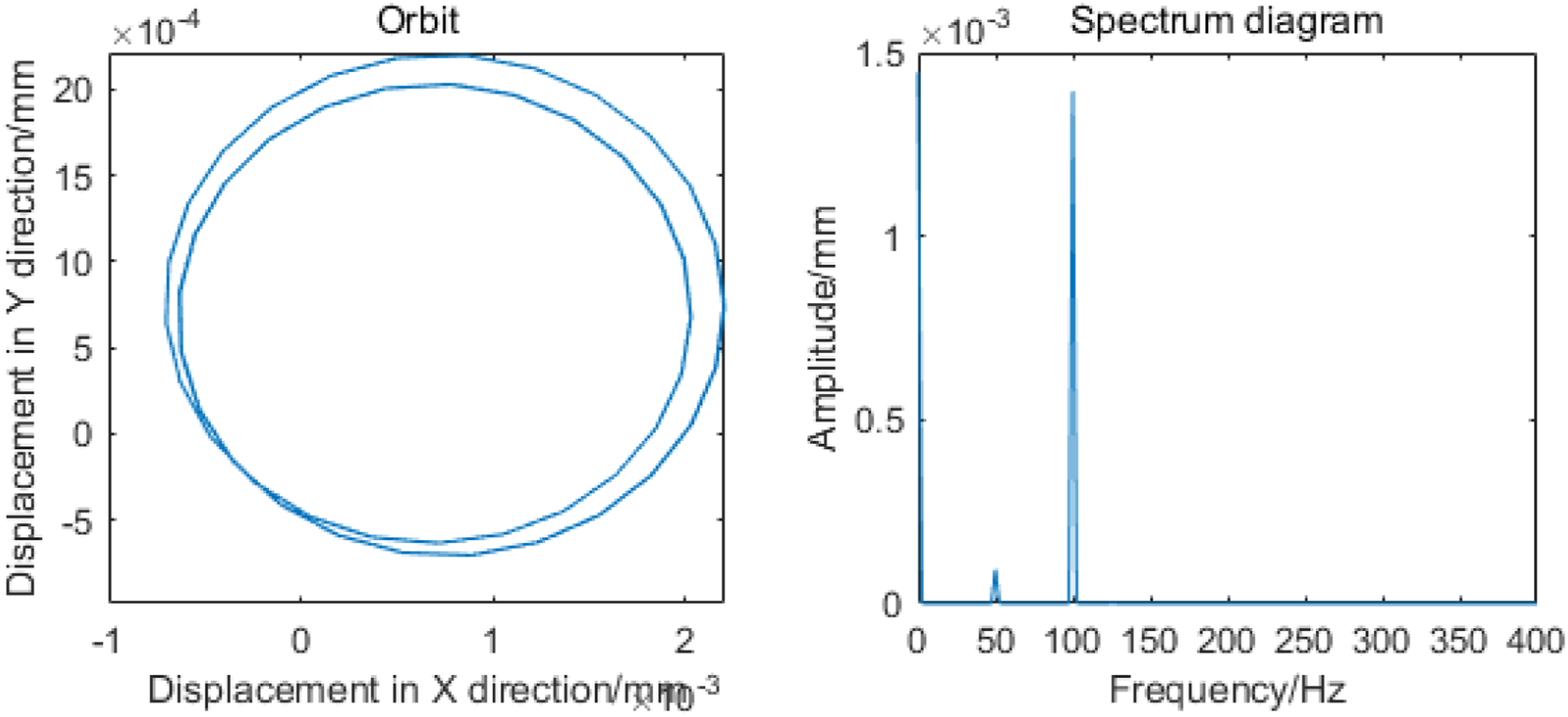
When the polar number is 1, the double frequency and zero frequency components represented by the unbalanced magnetic force are much larger than the fundamental frequency components, and the axis trajectory is in the form of a large ring with a small ring; When the polar number is 2, the amplitude of the second harmonic component decreases, and the amplitude of the first harmonic component remains constant. There is a small difference between the second harmonic component and the first frequency component at this point, and the inner ring component in the axis trajectory decreases; When the polar number is 3, the amplitude of the second harmonic generation of the unbalanced magnetic force decreases further. The fundamental frequency component is much higher than the second harmonic generation component at this time, and the inner ring component disappears. At this time, the axis trajectory is approximately circular; When the number of motor pole pairs is 4, which is greater than 3, the second harmonic component disappears completely and there are only zero frequency and fundamental frequency components in the system. The amplitude of the double frequency of the unbalanced magnetic force decreases continuously as the pole number of the motor increases, the axis trajectory tends to a stable state, and the vibration stability of the rotor system also improves.
Analysis of vibration characteristics of rotors with different eccentric angles
The motor rotor’s vibration response at different eccentricity angles can be acquired by solving the rotor dynamics equation with the eccentricity angle of 0°, 45°, and 90°, respectively. The number of motor pole pairs and eccentricity are selected as: P = 1, (a) Time-frequency domain image of the vibration response in the X direction. (b) Time-frequency domain image of the vibration response in the Y direction. (c) Orbit. When γ = 0°. (a) Time-frequency domain image of the vibration response in the X direction. (b). Time-frequency domain image of the vibration response in the Y direction. (c) Orbit. When γ = 45°. (a) Time-frequency domain image of the vibration response in the X direction. (b). Time-frequency domain image of the vibration response in the Y direction. (c) Orbit. When γ = 90°.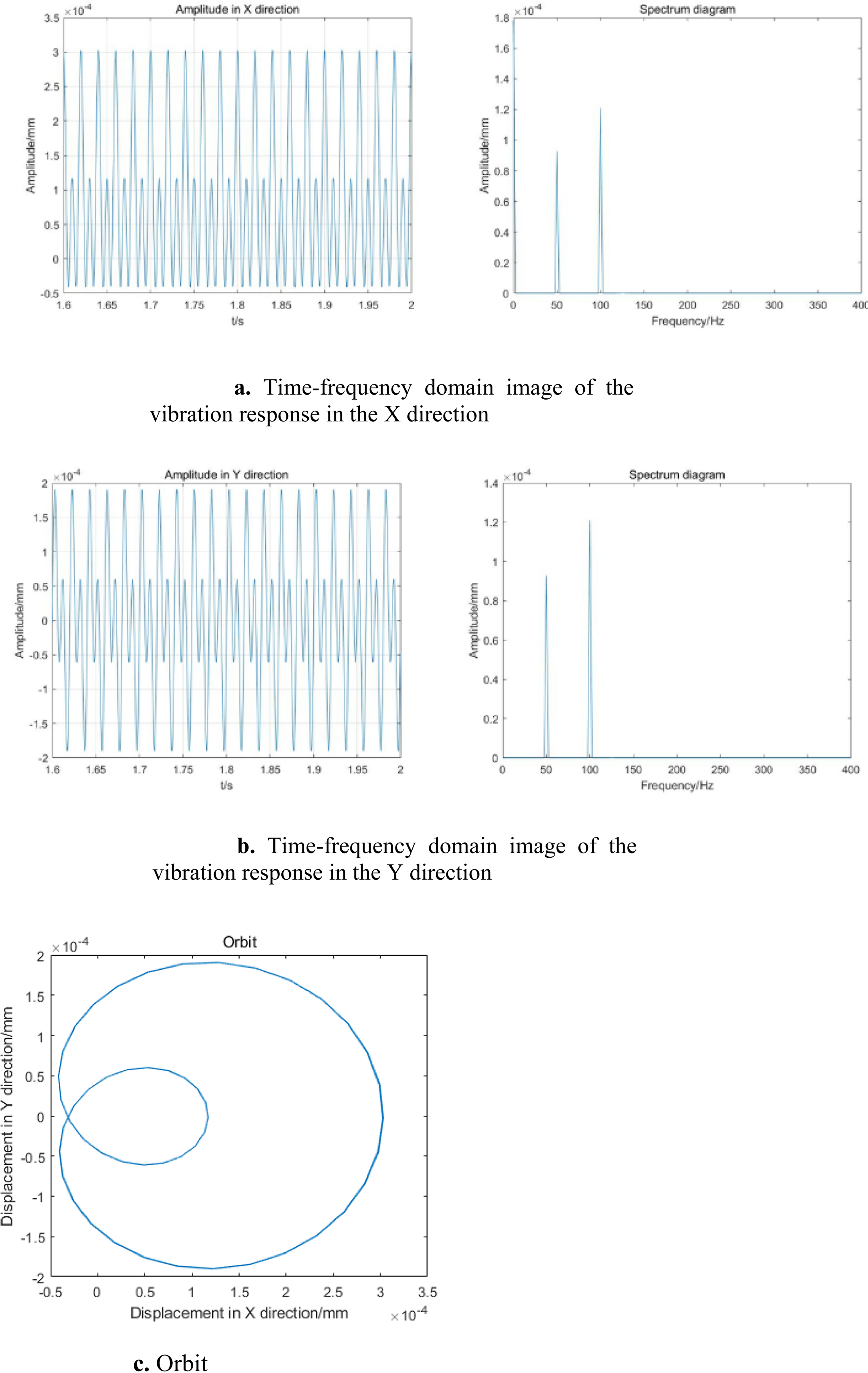
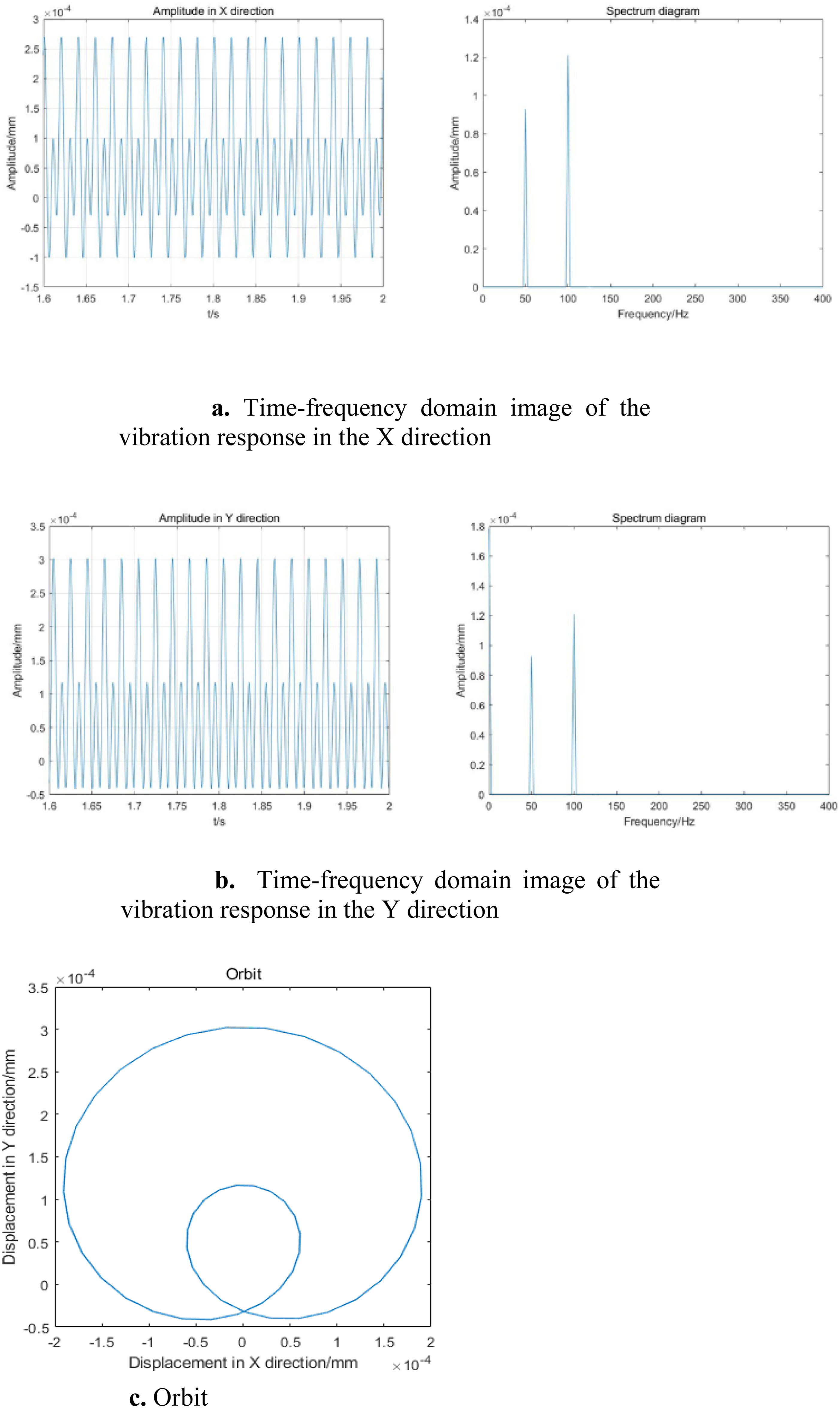
At an eccentricity angle of 0°, the amplitude in the X-direction is greater than that in the Y-direction; When the eccentricity angle is 45°, Vibration amplitudes in Y and X axis are equal; When the eccentricity angle is 90°, that is, it coincides with the positive direction of the Y axis, the vibration amplitude in the X direction is higher than that Y axis. From the axis track, with the increase of the eccentric angle, the inner ring turns counterclockwise from the X′ negative direction to Y.
Finite element simulation
Using ANSYS Maxwell finite element software, the model of synchronous motor is established, and the magnetic force of the motor is calculated under varying degrees of eccentricity. (Figure 13) Electromagnetic simulation model of permanent magnet synchronous motor.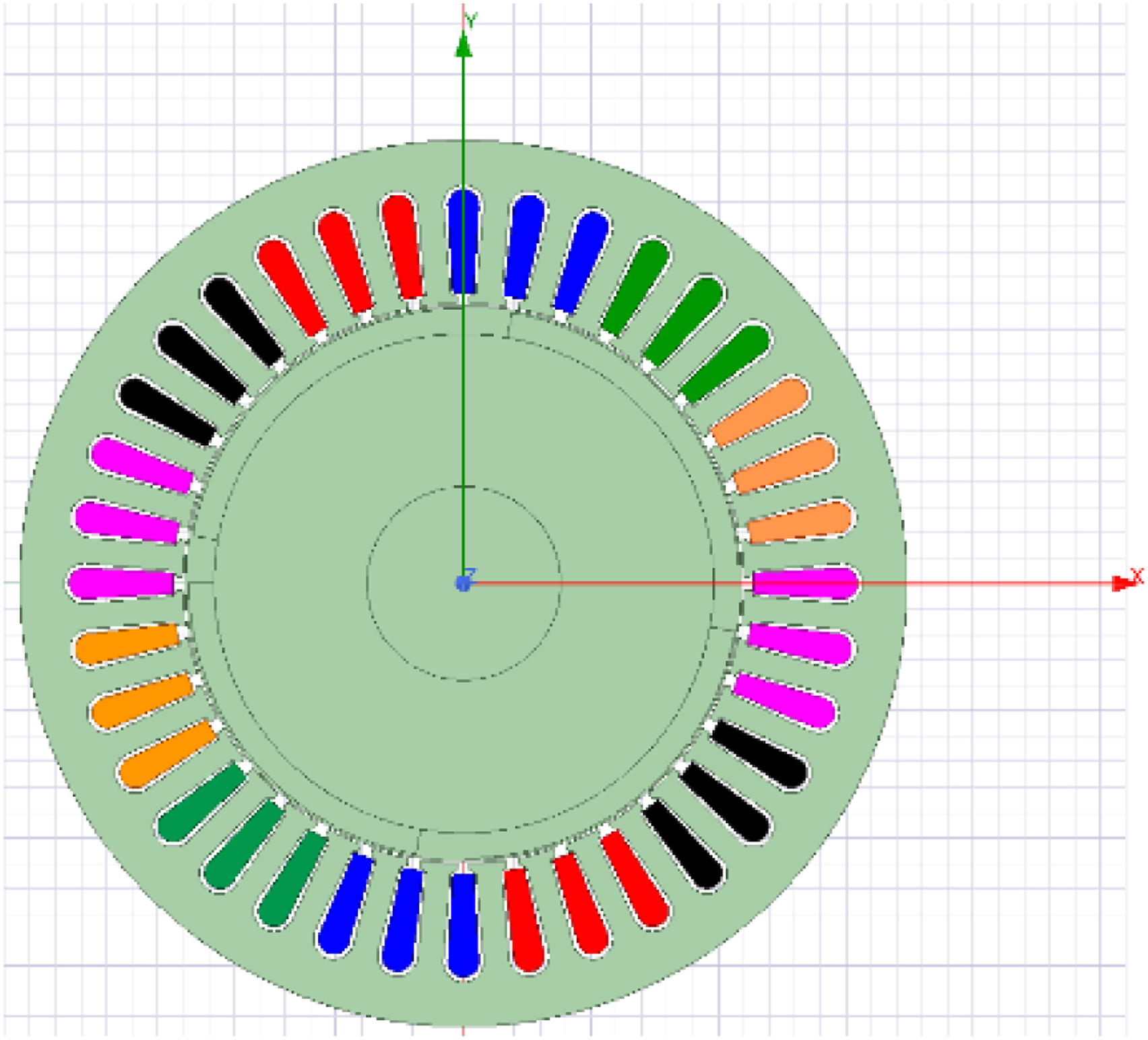
Through Maxwell software, the rotor is translated by 0.05, 0.1, and 0.2 mm along the positive direction of the x-axis, and the rotor rotation axis is also translated by the same distance along the x-axis, the time domain image of unbalanced magnetic force with static eccentricity of 0%, 5%, 10%, and 20% can be obtained, and the corresponding spectrum can be obtained by Fourier transform.
Equation (11) can be used to represent the electromagnetic force exerted by the rotor surface

The air gap magnetization is decomposed into two components, radial and axial, with expressions shown in equations (12) and (13)


Bring equation (11) into equation (7), input the expression in the field calculator of the software, and then the Unbalanced magnetic pull in X and Y directions can be simulation calculated. (Figure 14–17) Time domain of unbalanced magnetic force in X. (a) Spectrogram of unbalanced magnetic force. (b) When Time domain waveform of unbalanced magnetic force in Y. (a) When 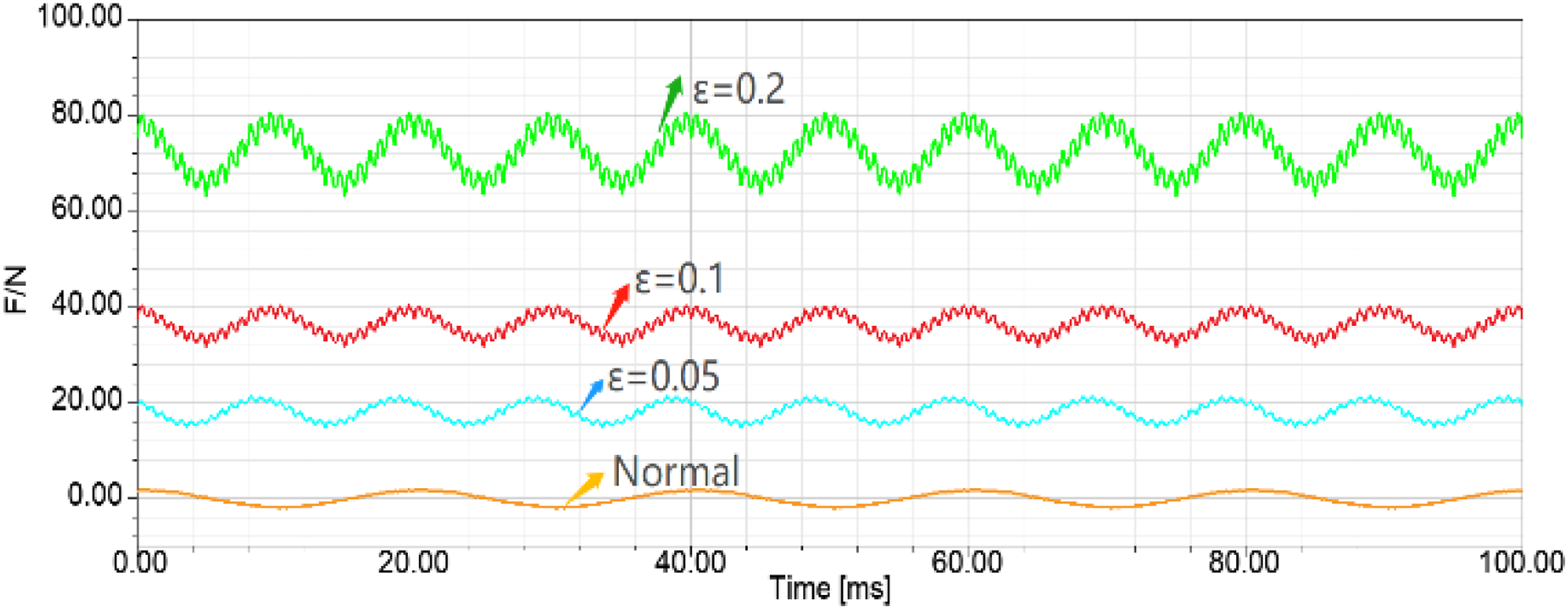
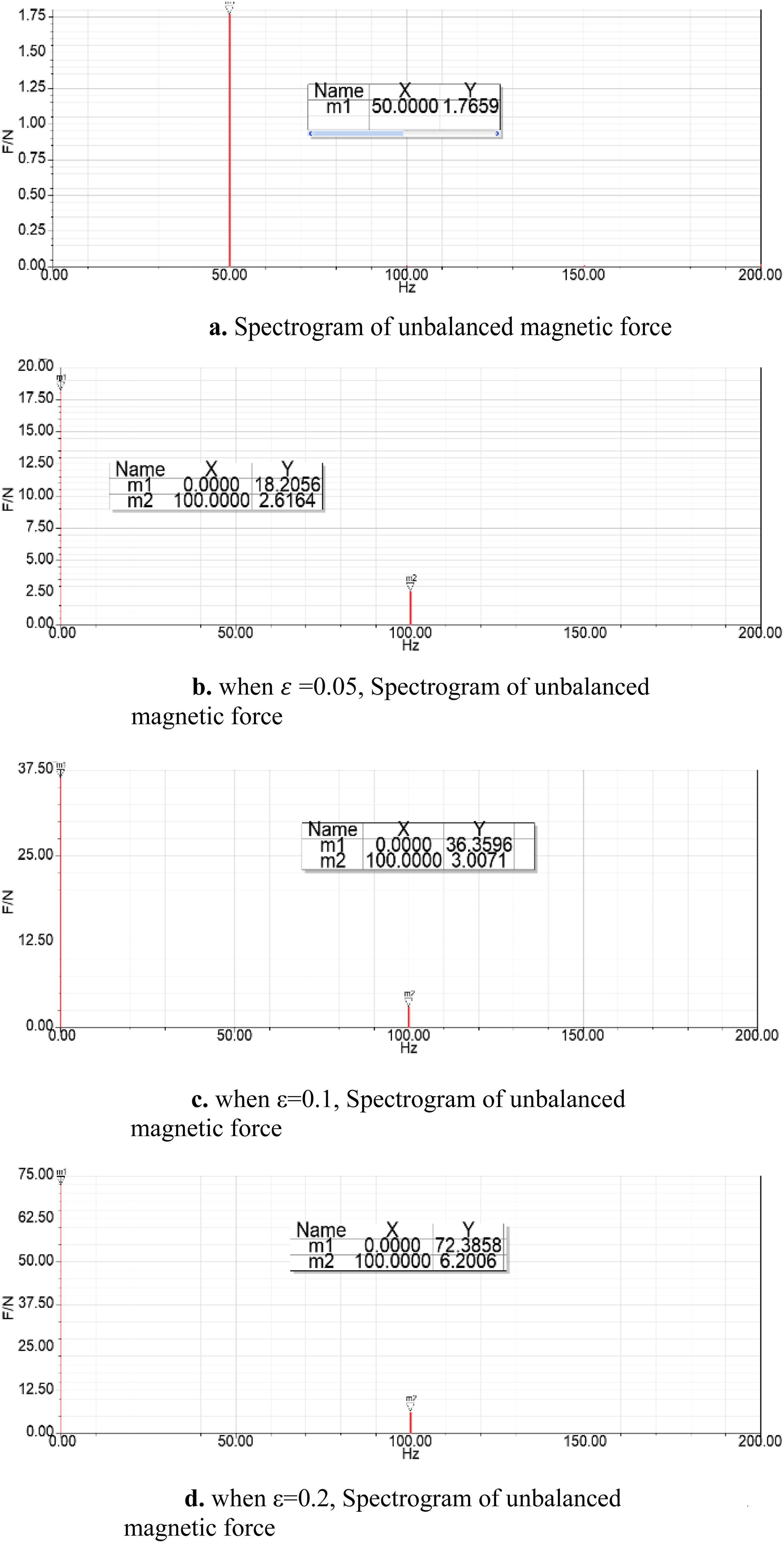
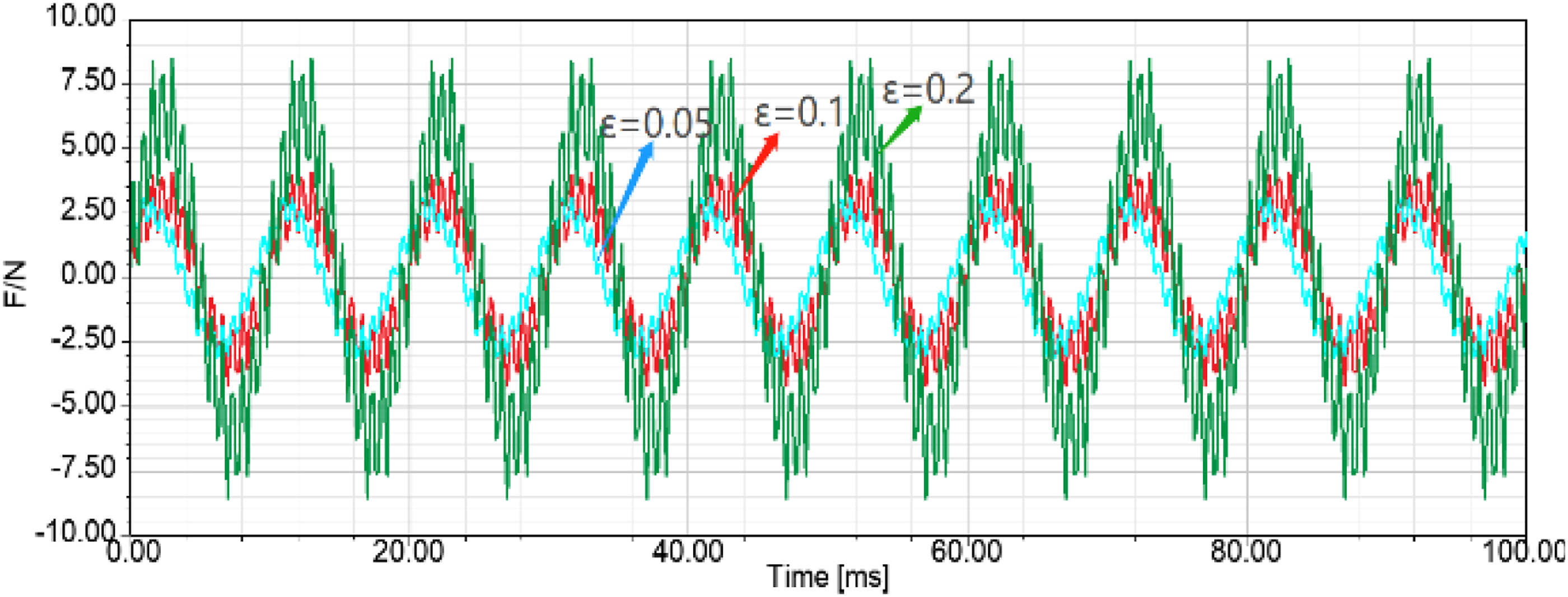
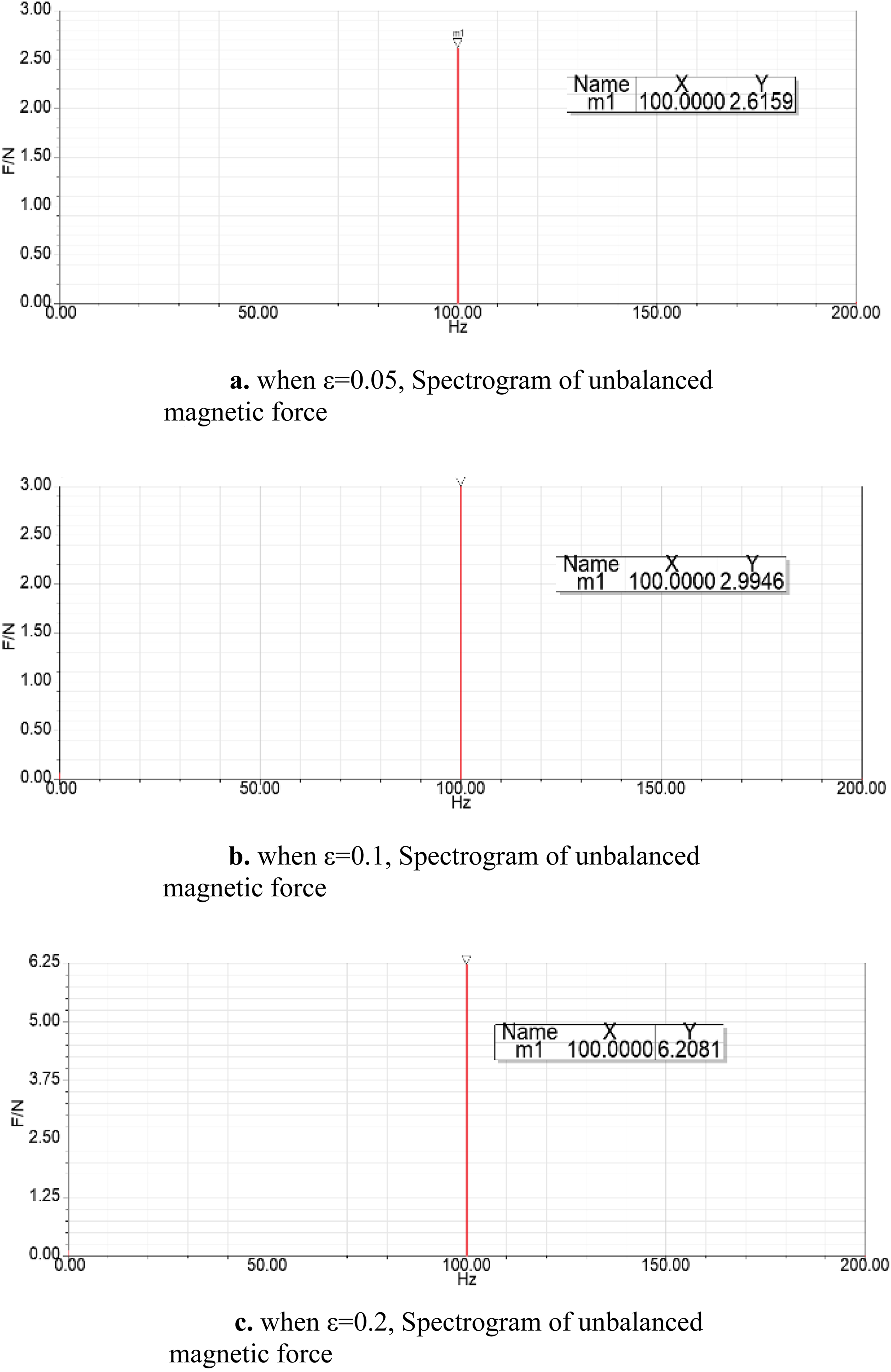
As motor’s rotor eccentric distance increase, the unbalanced magnetic force’s amplitude also increases; It can be seen from the spectrum that under normal conditions, the one fold component is the main component of the unbalanced magnetic force, while in case of eccentricity, zero-octave and two-octave components are present in the electromagnetic force on the rotor, and their amplitude increases with the degree of eccentricity.
The electromagnetic forces in the Y direction are characterized differently. Firstly the amplitude of unbalanced magnetic force in Y axis is mainly double frequency, and the zero fold frequency component disappears. As rotor eccentricity failures rise, the amplitude of double frequency increases. This is because the static eccentricity angle is along the X direction.
Conclusions
This paper analyzes in detail the unbalanced magnetic force law change rule of the synchronous motor’s rotor under air gap eccentricity fault through theoretical calculation and simulation analysis. The results show that: (1) When a static rotor eccentricity fault occurs in a synchronous motor, the rotor’s unbalanced electromagnetic force mainly consists of two-fold and zero-fold components. (2) After an eccentricity fault happened, the vibration response amplitude of the rotor increases as the degree of eccentricity increases; and different eccentricity fault angles affect the vibration amplitude of the rotor in both two direction. (3) When an eccentricity fault occurs, an increase in the number of synchronous motor pole pairs reduces the rotor vibration amplitude. When the number of motor pole pairs is less than 3, the rotor amplitude is mainly composed of zero-fold, one-fold, and two-fold component, while when the number of motor pole pairs is much than 3, the two-fold component of the rotor amplitude disappears, leaving only the zero-fold and one-fold components.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by National Natural Science Foundation of China (Grant No. 1217221, and Science and Technology Commission of Shanghai Municipality (19DZ2271100).