
Abstract
Space mining robots can develop and utilize abundant mineral resources in the outer space to solve the problem of the depletion of earth mineral resources. However, the motion errors of space mining robots in complex environments on the outer space surface of asteroids greatly hinder its applications. To bridge this research gap, a precise motion controller of the space mining robot is proposed in this study. Firstly, the kinematics model of robot’s wheels and the whole vehicle dynamics model in soft soil are established. Then, the optimal PID motion controller is developed based on the improved African vultures optimization algorithm (IAVOA). The Henon chaotic mapping, nonlinear adaptive incremental inertial weight factor and reverse learning competition strategy are introduced to optimize the initial population position, position update method and optimal solution output, respectively. Meanwhile, the excellent optimization performance of IAVOA is also validated by test results of nine benchmark functions. Lastly, the performance of controller is verified by simulations and experiments. The simulation results show that the proposed IAVOA-PID controller is superior to the original PID and AVOA-PID controller with faster response time and smaller overshoot. The experiment results show the space mining robot with the assistance of proposed motion controller can move with a trajectory error of less than 0.2 m and a motion error of less than 0.01 m.
Introduction
With rapid development of economic and technological levels, the use of earth resources has not decreased with the increase of world productivity. 1 Mineral resources such as ferrous metals, heavy and light metals and precious metals on the earth is facing depletion.2,3 It is essential to find reliable, cost-effective, and durable renewable energy to meet future energy needs and sustainable development strategies.4–6 The entire solar system is rich in resources, celestial bodies outside the earth, such as Moon, Mars and asteroids, which are rich in rare metals and mineral resources.7,8 It is necessary to design high-reliability space mining robots for the complex, variable surface environment and microgravity characteristics of outer space, and study their intelligent control technology to realize the superior motion characteristics in rugged working conditions. 9 However, the precise motion control for space mining robots remains an unresolved question. For this reason, the PID controller is proposed to realize the motion control for space mining robots. 10
In the domain of controlling, some scholars have put forward new control theories and methods, but the PID controller has been widely used because of its adaptability, robustness and wide adaptability.11–14 Chu et al. 15 proposed a tracking system for self-driving cars based on PID feedback, which improved tracking accuracy and steering smoothness with a steady-state error close to 0. For the motion control of upper limb prostheses in unknown situations, Zhou et al. 16 proposed a premise controller based on PID controller and generative adversarial nets (G-PID controller), and verified the effectiveness of proposed controller by simulations and experiments. Hua et al. 17 investigated a PID controller based on the improved grey wolf optimization algorithm (IGWO) for the velocity volatility of the capsule robot effectively. Farkh et al. 18 combined computer vision technology with PID controllers to realize the automatic steering and speed control of mobile robots. Liu et al. 19 used a fuzzy PID controller for independent control of the airflow and pressure. Xian et al. 20 integrated the optimized nonlinear fractional order type-2 fuzzy system with PID controller and proposed a novel controller for quadrotor robots, which can provide excellent control accuracy and disturbance rejection capabilities for quadrotor robots. Zhang et al. 21 used a neural network based fuzzy PID to improve the control effect of brushless DC motors. Zeng et al. 22 presented a nonlinear PID control system based on adaptive population extreme optimization, which significantly improved the overall performance of its control system. However, using the PID controller to achieve precise control for space mining robots still has many limitations. Firstly, the parameters tuning of PID controller is time-consuming and laborious, and the fixed parameters of conventional PID are difficult to cope with the complex operating environment in outer space. Meanwhile, most of the previous studies did not fully consider the effect of loose soil in space on robotic wheel slip shift, but the motion characteristics of space mining robots are potentially affected by the wheel slip shift, which is necessary to consider in actual working conditions.
Literatures review about improvement of PID controllers using optimization algorithms.
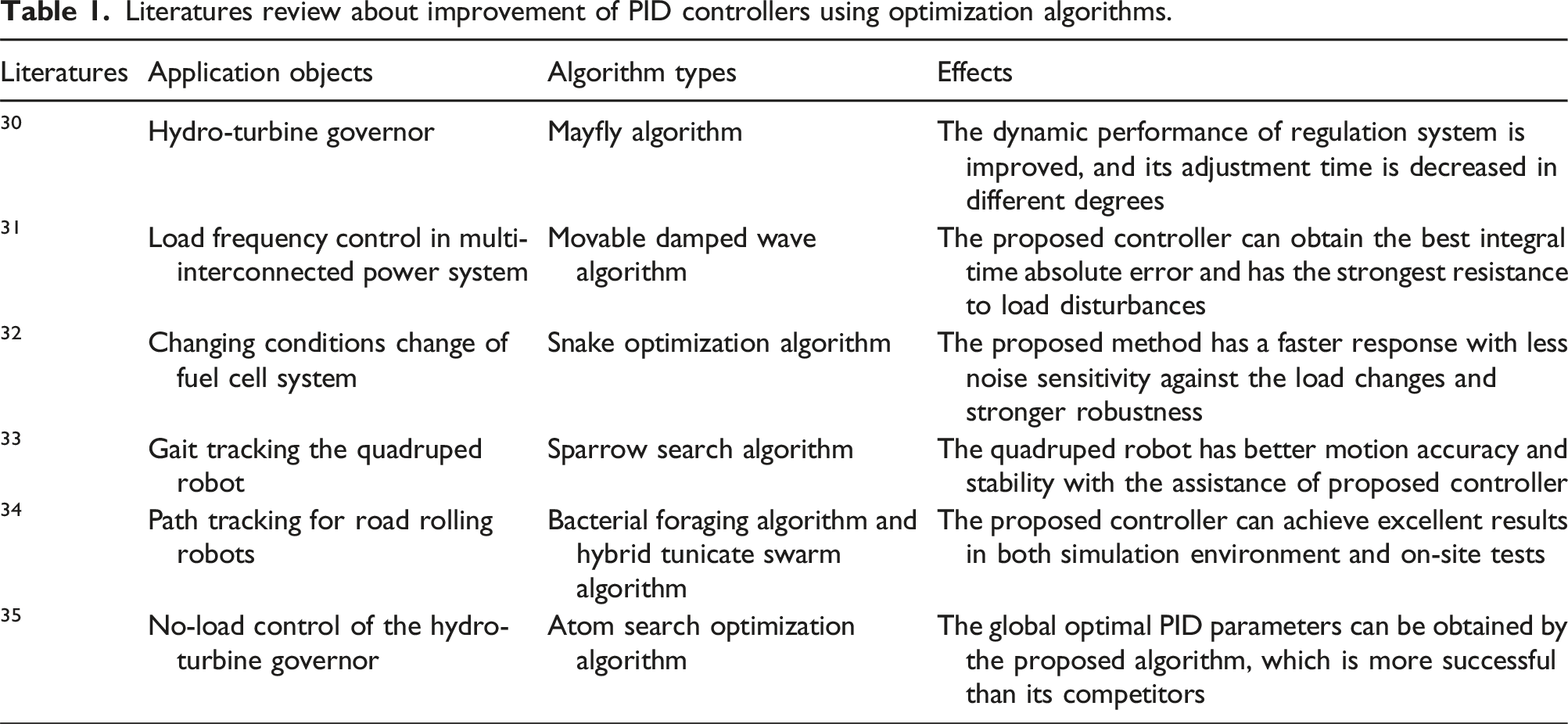
Therefore, it is reasonable to use intelligent optimization algorithms to realize the precise motion control of space mining robots. Abdollahzadeh et al. 37 proposed an African vultures optimization algorithm (AVOA), which has better local and global search capabilities compared than existing algorithms. However, it still needs to be improved on problems such as the utilization of population information, the balance between local and global search phases and optimal solution selection. 38
To our best knowledge, the AVOA has not been applied to improve the motion of space mining robots. One reason is that the AVOA cannot be directly applied to space mining robots due to lacking necessary modelling analysis. Meanwhile, existing research on space mining robots is still in their infancy, which mostly focussing on the structure design, and the studies on precise motion control for space mining robots are very limited. Therefore, combining the motion controllers of space mining robots with AVOA has high practical value for the precise motion of asteroid surfaces under complex working conditions.
A precise motion controller for the space mining robot based on the IAVOA is proposed in this paper. Firstly, the kinematics model of the robot’s wheels and the whole vehicle dynamics model in soft soil are built. Moreover, the PID motion controller is developed, and an improved African vultures optimization algorithm (IAVOA) is proposed to tune the PID parameters. The test results of benchmark functions verify that the IAVOA has global search ability, which can avoid falling into local optimum effectively. The effectiveness of IAVOA for improving the accuracy of robot motion control is verified through simulations and experiments. The analysis results show that the proposed controller has better control effect and response characteristics than the existing methods, which can significantly improve the motion performance of space mining robots.
The remainder of this paper is organized as follows. Section 2 describes the structure of space mining robot and analyses its motion mechanism. In section 3, the IAVOA algorithm is presented, and its feasibility is verified. In section 4, the effectiveness of proposed controller is verified through simulations and experiments. Section 5 summarizes conclusions and future works.
Motion mechanism of space mining robot
As shown in Figure 1, a multi-function integrated space mining robot is proposed in this paper, which mainly includes robot body structure, wheel, drive motor, drilling module, grabbing module, camera and navigation module. Each wheel of the robot is equipped with a driving motor and a steering motor to facilitate the robot to make corresponding motion strategies in the rugged and changeable environment of the asteroid surface. At the same time, the main structure of robot is designed with video and navigation modules, drilling modules and grasping modules, so that the space mining robot can perform complex tasks such as mining mineral resources and operating barrier avoidance on the surface of the outer space asteroid. Space mining robot 3D model.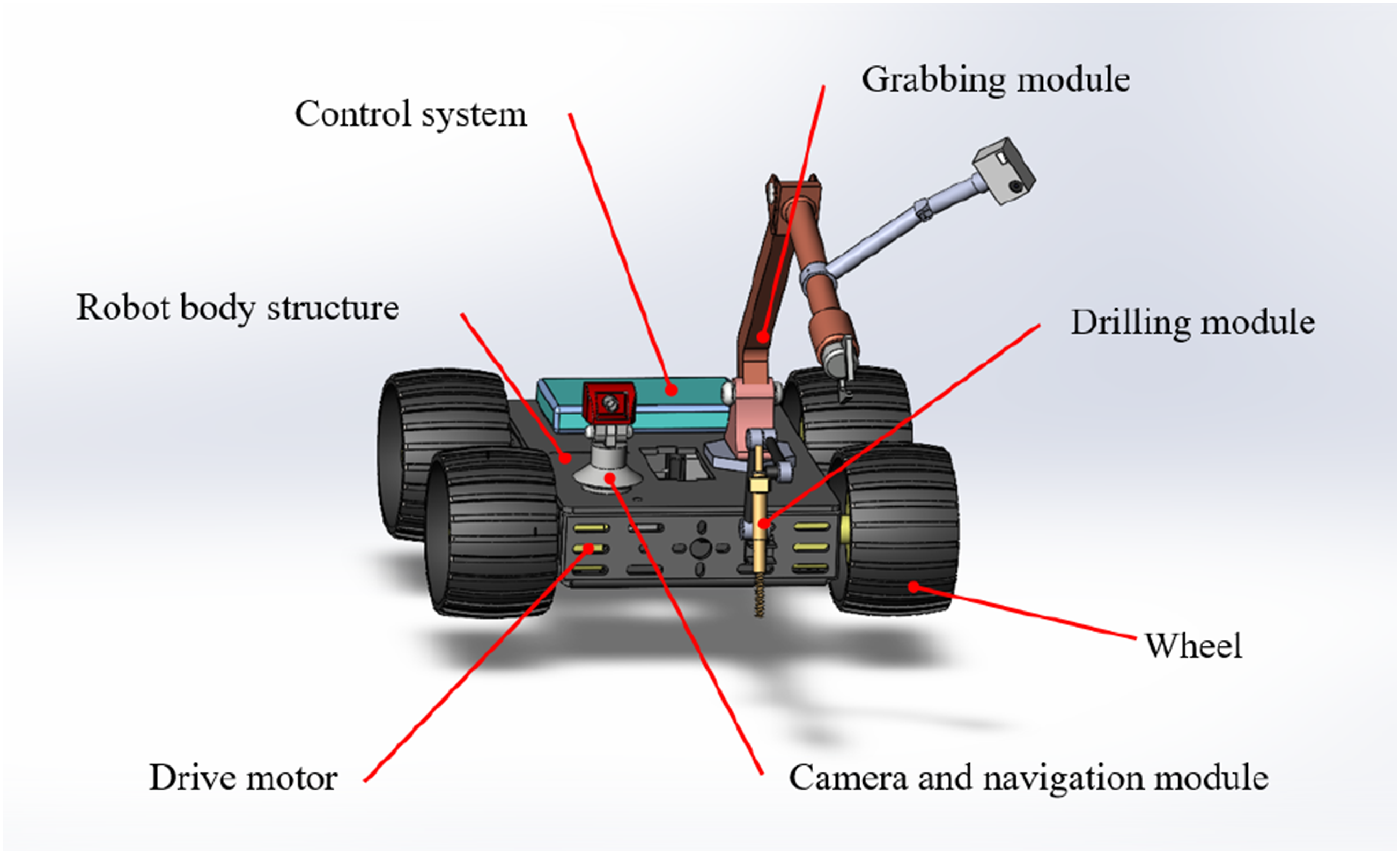
Based on the motion characteristics of space mining robots in complex environments, research is conducted on control strategy in this paper. As shown in Figure 2(a), a single wheel of a space mining robot is used as a research object to study the relationship between space wheels and the surface of an asteroid. In the figure, the F
X
and F
Y
are the force of the rocker arm or bogie on the wheel. N is the reaction of the surface of the asteroid to the wheel. Motion mechanism analysis of the space mining robot.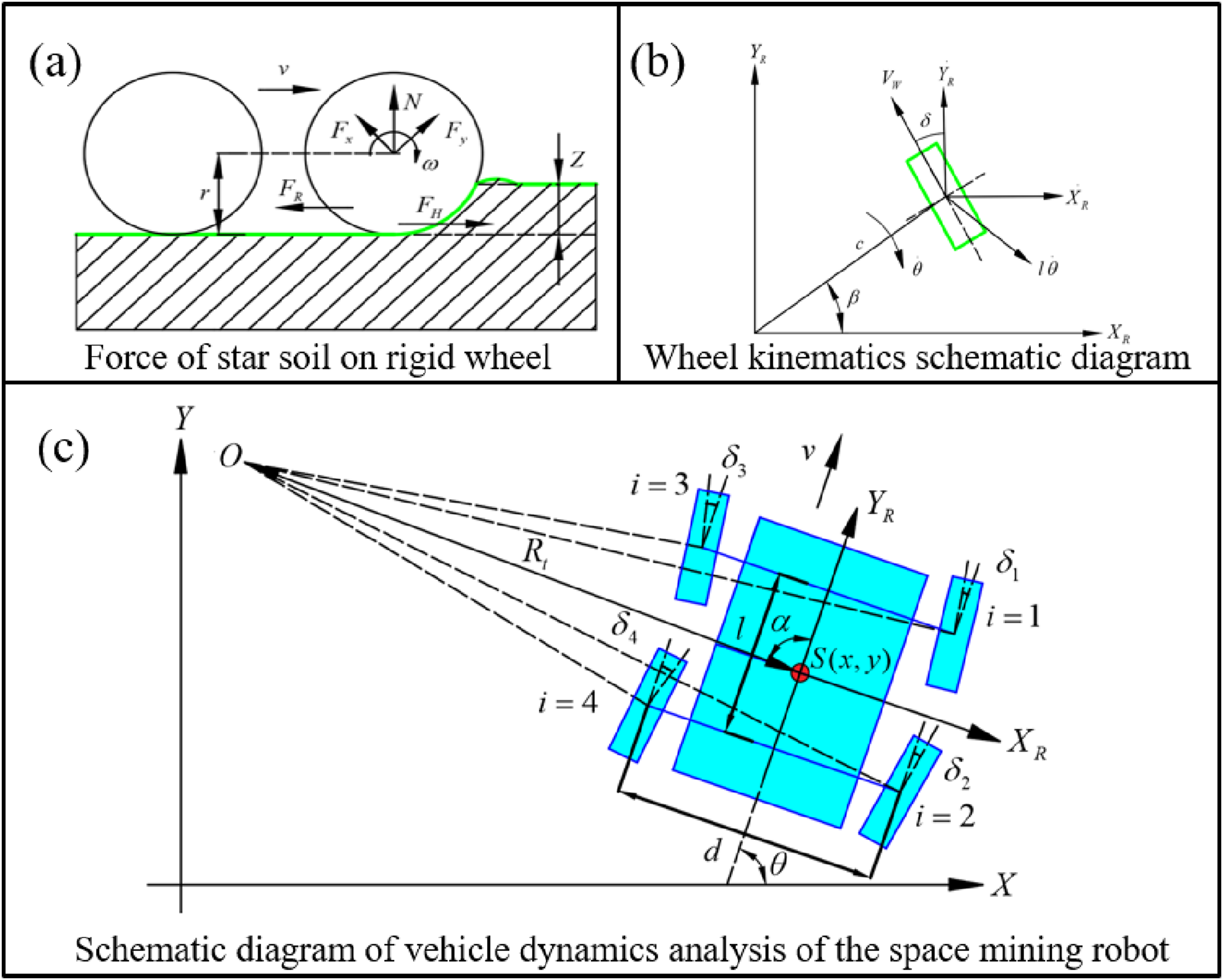
The traction generated by each wheel F
DI
is the difference between the soil thrust F
H
and the soil drag F
R
the wheel. It can be expressed as formula (1).
For the soil drag 
Because of the soft soil on the surface of the asteroid, during the straight-line travel of space mining robot, the wheels will generate the movement relative to the ground. And during the movement, the wheels are rolling or sliding. Most of the time, the wheels are rolling and sliding. The slip rate s is defined as formula (3), which is utilized to describe the proportion of sliding components in wheels.
Each wheel of space mining robot is driven independently and rigidly, the motion parameters are shown in Figure 2(b). Therefore, when s = 0, the wheels are rolling purely. At this point, the speed components of wheels in its plane should be equal to the travelling speed of wheels.
According to the overall dimension parameters and structure characteristics of space mining robot, the whole vehicle coordinate system based on the path is established to analyse the dynamics characteristics of robot in Figure 2(c). The steering radius of space mining robot is R t ; the angles between the motion direction of four wheels and the motion direction of robot are δ1, δ2, δ3 and δ4; the position centre of space mining robot chassis in the coordinate system is S (x,y); the steering azimuth of robot body is α; the front and rear axle spacing is l and the width of robot body is d.
The location matrix of space mining robot is assumed to be ξ
R
= [X
R
,Y
R
,θ]T, then we can get:
Because of the geometry and position relationship of robot, the δ of four wheels can be calculated.



During the operation of space mining robot, the angle of each wheel can be calculated by the above-mentioned formulas.
Taking the formula (5) into the formula (4), and considering that all four wheels of space mining robot are in pure rolling condition, the constraint equation can be obtained as follows:
Since the space mining robot belongs to the non-complete constraint system, according to the Routh equation under the non-complete constraint system, the dynamic equation can be described as:
The 


The whole kinetic energy of space mining robot mainly consists of the movement of vehicle body itself, its own rotation and the rotation of four wheels, which can be expressed as formula (15).
In the process of working on the surface of an asteroid, the space mining robot alternates between soft soil tissue and hard rock pavement, so its potential energy is defined as formula (16).
The generalized force Q
j
corresponding to the generalized coordinate q
j
is as follows:


The longitudinal motion and actual situation of robot body in space are considered in this paper, and the dynamic equation is given as formula (20).
Substituting formula (12)–(19) into formula (11).


Substituting formula (23) into formula (21) and (22) by the T
Ri
equations obtained earlier, the kinetic equations of space mining robot are obtained.

Control system for space mining robot
According to the established wheel constraint equations and vehicle dynamics analysis, the motion control scheme based on the trajectory of space mining robot is constructed, as shown in Figure 3. The expected displacement X
d
, expected velocity Space mining robot control programmer.
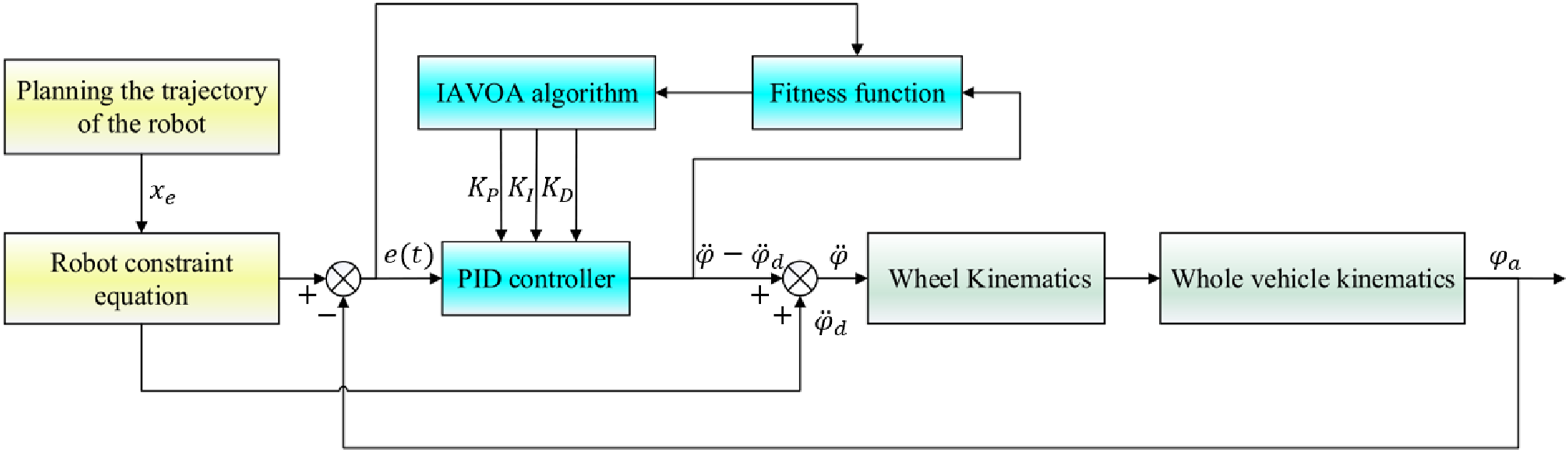
Based on the formula (26), the angle deviation and speed deviation are calculated, and the desired angle acceleration is compensated.
The effective drive moment of wheel T
ai
is obtained by formula (21) and formula (27).
The relationship between effective drive moment of wheel i and wheel speed can be reduced to the inertial link.
To realize the premise parameter selection and motion control, the PID parameters are adjusted by IAVOA.
Improved African vultures optimization algorithm (IAVOA)
The African vultures optimization algorithm (AVOA) starts with the lifestyle of African vultures and simulates the foraging and navigation operations. Firstly, the population is initialized, and the adaptability of all solutions is calculated to choose the optimal solution as optimal vulture, and the suboptimal solution is chosen for suboptimal vulture. Other vultures will move based on the positions of optimal vulture and suboptimal vulture. Each iteration process will refresh the entire population.

The vulture hunger rate is calculated by:

During the exploration phase, the other vultures will choose one of the two best vultures randomly and search for food within random distances. The policy selection parameter must be assigned before the search operation.


After entering the development phase, the vulture population enters the first phase of development phase when the value of F is between 0.5 and 1. In the first phase, two kinds of different rotational flight and siege strategies are performed. P2 is used to determine the choice of each policy and its value should be between 0 and 1. At the beginning of phase, the randP2 is generated, which is a random number between 0 and 1. If the number is greater than or equal to the parameter P2, the siege strategy will be implemented slowly; however, if the random number is less than P2, the rotational flight policy is executed. The process is shown in formula (37).
Weak vultures will attempt to fatigue healthy vultures by clustering around them and sparking skirmishes, which make weak vultures easier to obtain food from healthy vultures. Formula (38) is used to model this step.
Vultures often perform the rotational flights, which can be used to simulate the spiral motion. Spiral motion models have been used for the mathematical modelling of rotational flight. In this approach, a spiral equation is established between all vultures and one of the two optimal vultures. The rotational flight is indicated by formula (39) and formula (40).


If |F|<.5, the following steps are executed. At the beginning of the phase, the P3 and randP3 are generated, which are the random numbers between 0 and 1. The vulture populations have conducted the aggressive struggle to besiege and compete for food, as shown in formula (41).
Sometimes, vultures will starve, and there is considerable competition for food, which a food source may be accumulated by several vultures. Formula (42) and formula (43) are used to describe this process of vultures.


At the same time, the leading vulture becomes hungry and does not deal with other vultures, and other vultures will become aggressive. Formula (44) is used to model the process.
Above is the whole process of AVOA.
Although the AVOA has been applied to solve many practical problems in engineering fields in recent years, it still suffers from problems when dealing with high-dimensional or complex problems, such as easy to fall into local optimization and low search efficiency. Therefore, three improvement points are proposed in this paper to optimize the initialization phase, position update phase and optimal solution output phase of AVOA algorithm, respectively, which further improving the performance of AVOA.
Firstly, in the initialization phase, the original AVOA is initialized by rand, lb and ub of variables alone, and the distribution of initialized population is not uniform and has high uncertainty. Therefore, the Henon chaotic mapping theory is introduced in this paper to initialize the original AVOA population chaotically, which improves the randomness degree of population initialization and effectively enhances the search efficiency of algorithm.
Henon chaotic mapping is a nonlinear theory produced in 2-dimensional space. It is a discrete chaotic map with the characteristics of nonlinear, ergodicity and randomness. Its formula is as follows:
In this phase, we will generate both the chaotic initialized population and the conventional initialized population, calculate and sort the adaptability of each initial population. Then, the first N elite individuals will be taken, and the elite individual sequence is as follows:
Secondly, the original AVOA usually mechanically completes the global search phase at first and then performs the local searching phase during the process of updating population positions. It is difficult to achieve a reasonable balance between the two phases for complex practical problems, which seriously affects the search efficiency and accuracy. In the actual optimization process, if the effective combination of local search and global search can be achieved, it will effectively accelerate the convergence speed of AVOA and avoid falling into the local optimum.
For this reason, a nonlinear adaptive incremental inertial weight factor ω is added to the position renewal of vulture populations. The formula is as follows:
Later, the ω is introduced into vulture position update formulas in the exploration and exploitation phases, as shown in formulas (48)–(50).


The positions of vultures are optimally updated with the above-mentioned formulas.
When the inertial weight factor ω is large, the global optimization ability is significantly enhanced, but the local optimization ability is decreased. When the inertial weight factor ω is small, the global optimization ability is decreased, while the local optimization ability is enhanced and the accuracy of solution will become higher. Adaptive conferring of different inertial weight factors is allowed in this step, which takes fully into account evolutionary differences between population vultures during evolution, and addresses the need of AVOA for global exploration and local exploitation capabilities at different evolutionary times.
Thirdly, in the optimal solution output phase, the original AVOA uses simply the information from optimal location in the single iteration and wastes some valuable information. Therefore, the reverse learning competition strategy is introduced in this paper. Then the inverse learning solution of best individual in the single iteration is obtained, and the inferior individuals in the iteration process are given a chance to transform into superior individuals, which fully utilizing the useful information of population.
The reverse learning solution E_P (i+1) is obtained through the optimal solution from single iteration.
By calculating the population fitness of P (i+1) and E_P (i+1), the optimal position of vulture is optimized. In this way, the optimal individual position is not lost, which also maximizes the use of information from outstanding individuals. Underperforming individuals are given the opportunity to learn more, which ensuring the accuracy of output at each iteration and improving the convergence rate of the AVOA.
In summary, for the problems of original AVOA algorithm, such as the uneven population initialization, unbalanced position update process and underutilized population information, the Henon chaotic mapping, nonlinear inertia weight factor and reverse learning competitive strategy are proposed to improve them in this paper, which forming the IAVOA algorithm. The above improvements enhance the searching efficiency and searching stability of algorithm, and reduce the probability of falling into the local optimum. The flowchart of IAVOA is shown in the Figure 4. Flowchart of IAVOA.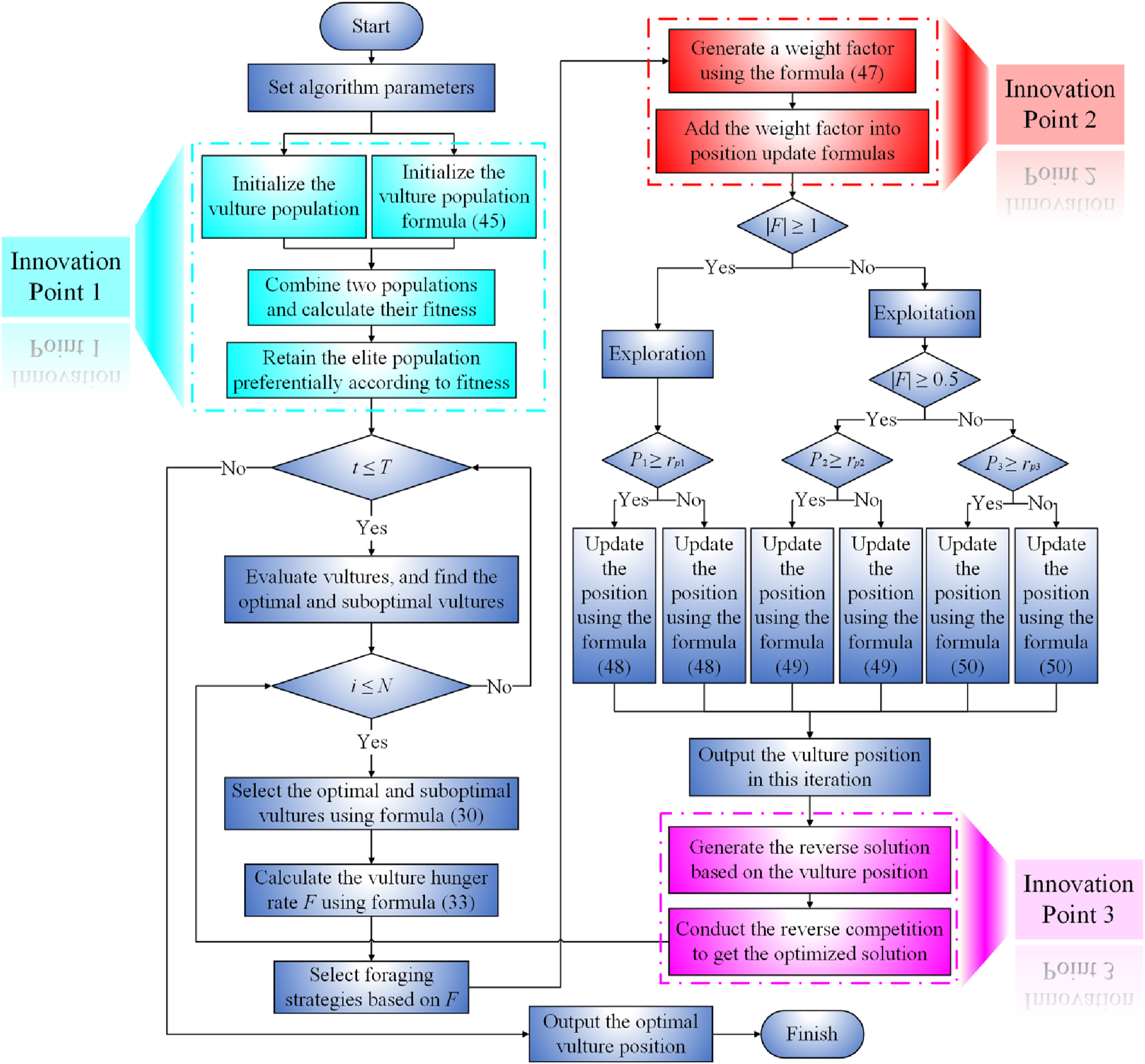
Parameters sensitivity analysis of IAVOA
In IAVOA, W (used in the formula (32)) is the factor mainly used to balance the exploration and exploitation phases of vulture populations. The P1, P2 and P3 (used in the formula (34), (37) and (41), respectively) are mainly used to guide vulture populations to perform different ways of location updating. Therefore, the above parameters are important for the performance of IAVOA. These parameters are set as 2.5, 0.6, 0.4 and 0.6, respectively, in the original AVOA. In this section, the effect of different magnitudes of the above parameters on the performance of IAVOA is mainly investigated. Meanwhile, nine benchmark functions are introduced to test the IAVOA with different parameter values. The mathematical models of benchmark functions are shown in the Appendix 1, which mainly includes the unimodal benchmark functions, multimodal benchmark functions and fixed-dimension multimodal benchmark functions.
Effect of main parameters on IAVOA.
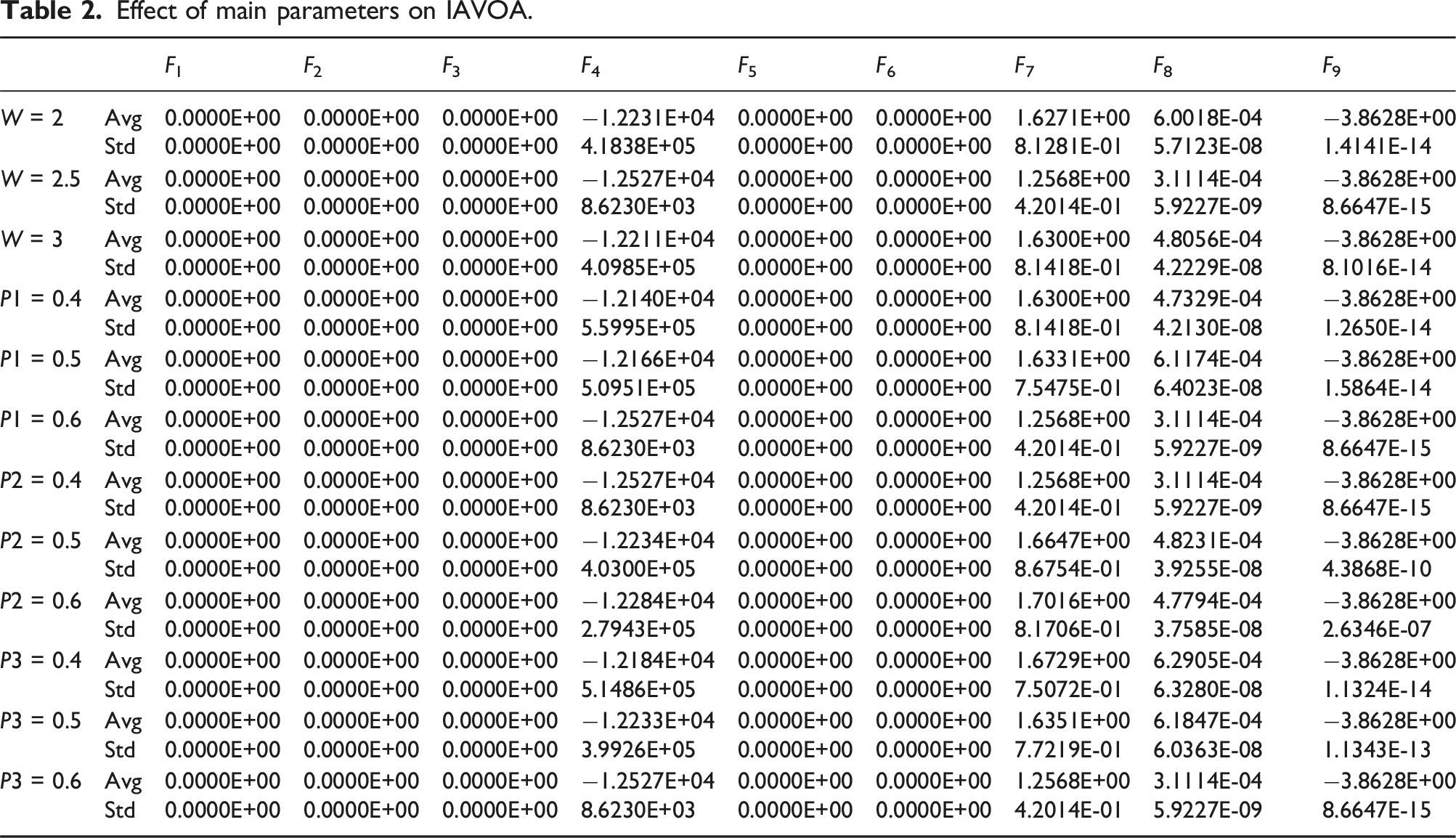
When the values of W, P1, P2 and P3 are set as 2.5, 0.6, 0.4 and 0.6, respectively, we can find that IAVOA shows the highest search ability and stability. Especially when dealing with the functions F4, F7, F8 and F9, the aggregate level of IAVOA is far more comprehensive than that in other cases. Therefore, the parameters of IAVOA are all set as above when dealing with the relevant benchmark functions and specific control problem of space mining robots in the following.
Feasibility verification of IAVOA
Comparison results of IAVOA and AVOA based on nine benchmark functions.

The experimental results show that the IAVOA all ranks first in nine benchmark functions. Especially for the functions F1∼F4 and F7∼F9, the search accuracy and stability of IAVOA far exceed that of the original AVOA, which also verifies the positive effect of inertia weight factor and reverse learning competitive strategy for the algorithm’s position iteration and jumping out of the local optimum.
The convergence curves of IAVOA and original AVOA for the nine benchmark functions are shown in the Figure 5, which can be found that the IAVOA has a significant advantage over the AVOA algorithm in terms of convergence speed and search accuracy. When dealing with the benchmark functions F5 and F6 especially, the IAVOA shows a strong global search ability, and it can search the optimal value of functions within five iterations, which also verifies that the population initialization based on Henon chaotic mapping theory effectively improves the convergence speed and searching ability of algorithm. Convergence curves of IAVOA and the original AVOA.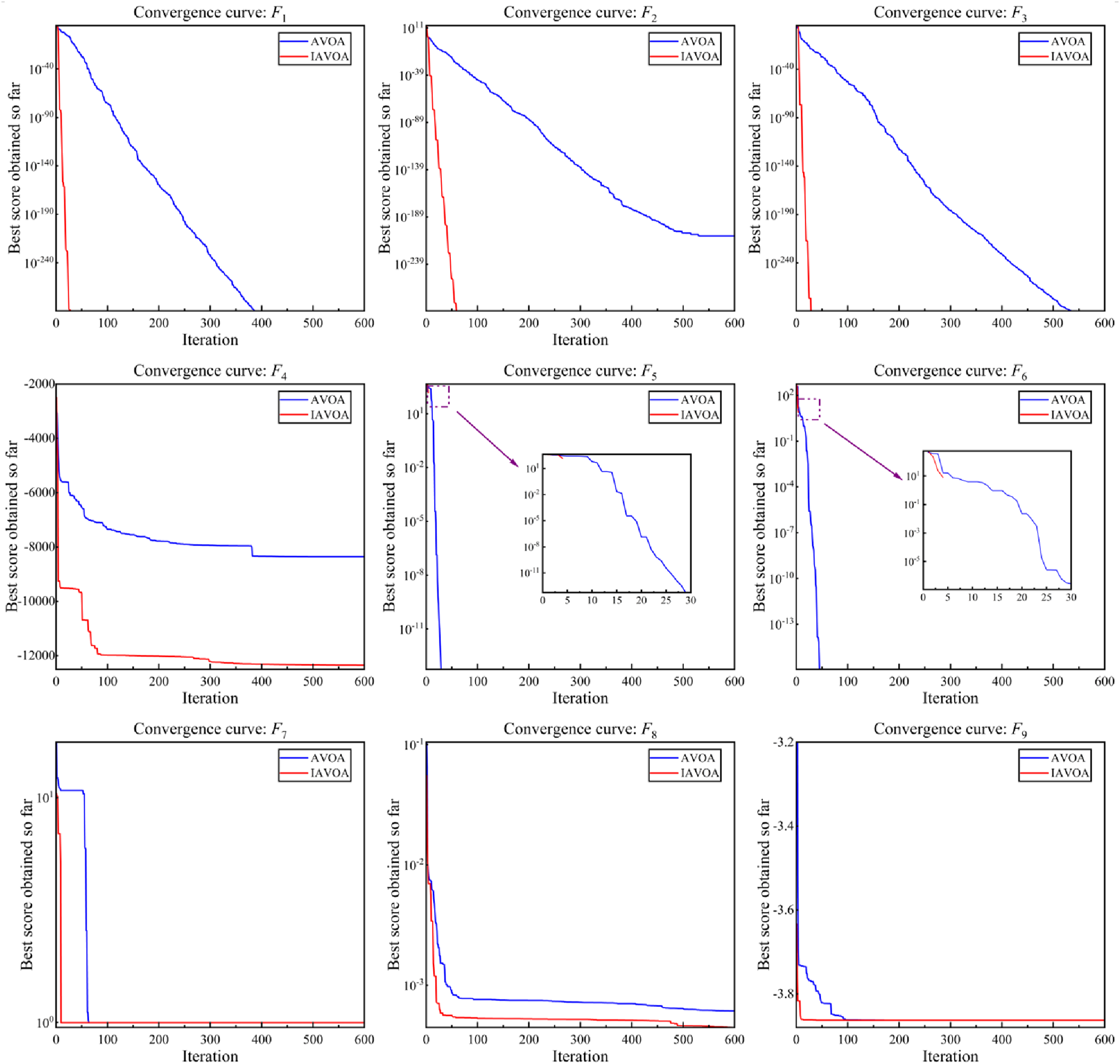
Simulation and experimental results
Simulation analysis
To better evaluate the optimization effect of IAVOA for the controller, the fitness function is established in this paper to comprehensively evaluate the various performances of proposed controller. The minimum objective function of improved PID controller is determined by the time integral of the absolute value for the error e(t). The function uses u2(t) to effectively avoid overcontrolling, and as an indicator, overcontrolling is suppressed once generated. Therefore, the objective function can be expressed as:
Conventional PID, AVOA-PID and IAVOA-PID controllers are used to simulate the response of unit step signal. Control system is simulated in MATLAB/Simulink. The step signal is utilized as input signal with a running time of 2s, as shown in the Figure 6. Step response curves for different controllers.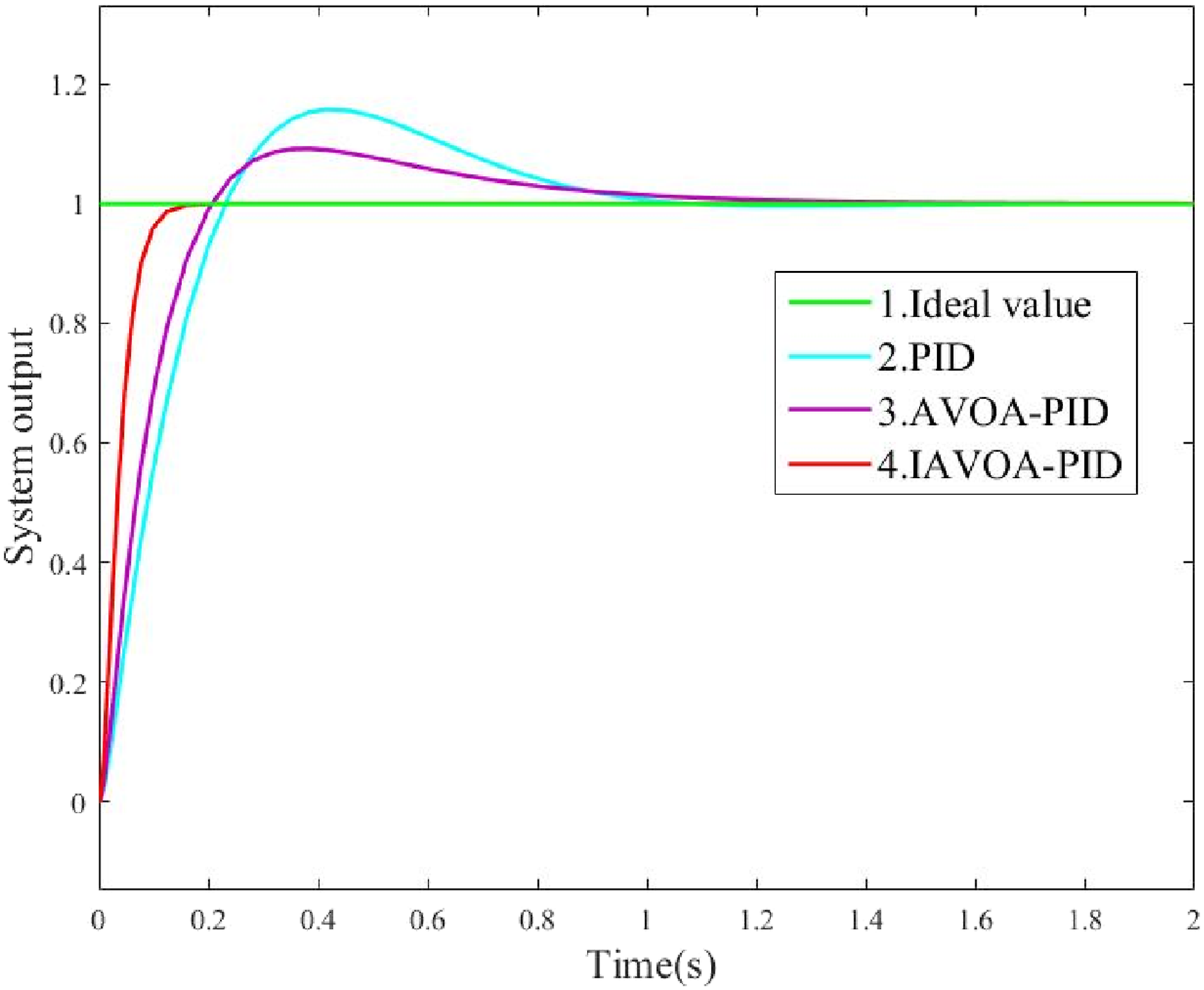
Detailed performance data of 3 PID controllers.

Experimental results
To verify the excellent control effect of the proposed IAVOA-PID controller on the motion of space mining robot, the motion control system is established in the Figure 7 to carry out trajectory and speed tracking control experiments for the space mining robot. Motion control system of space mining robot.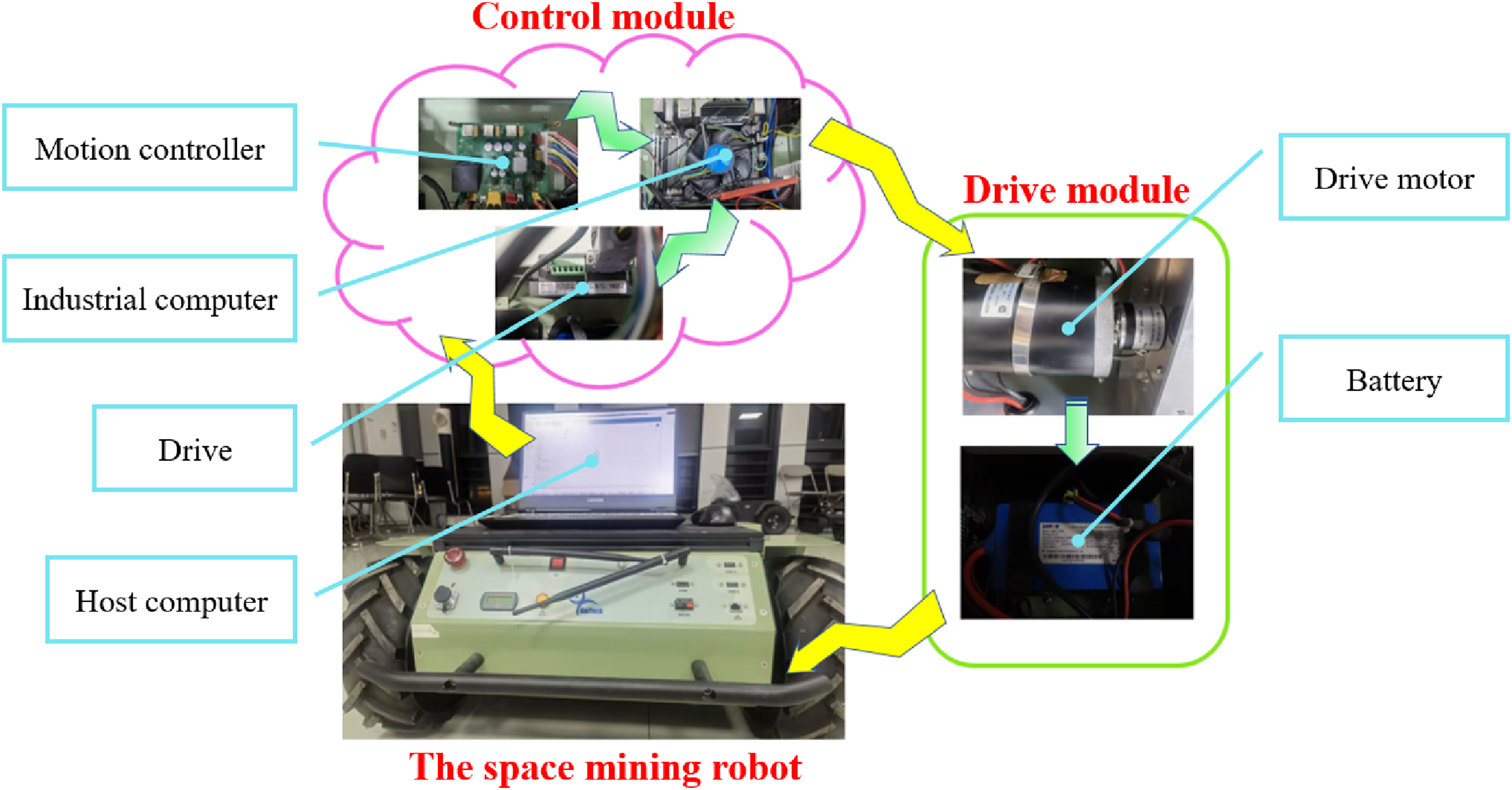
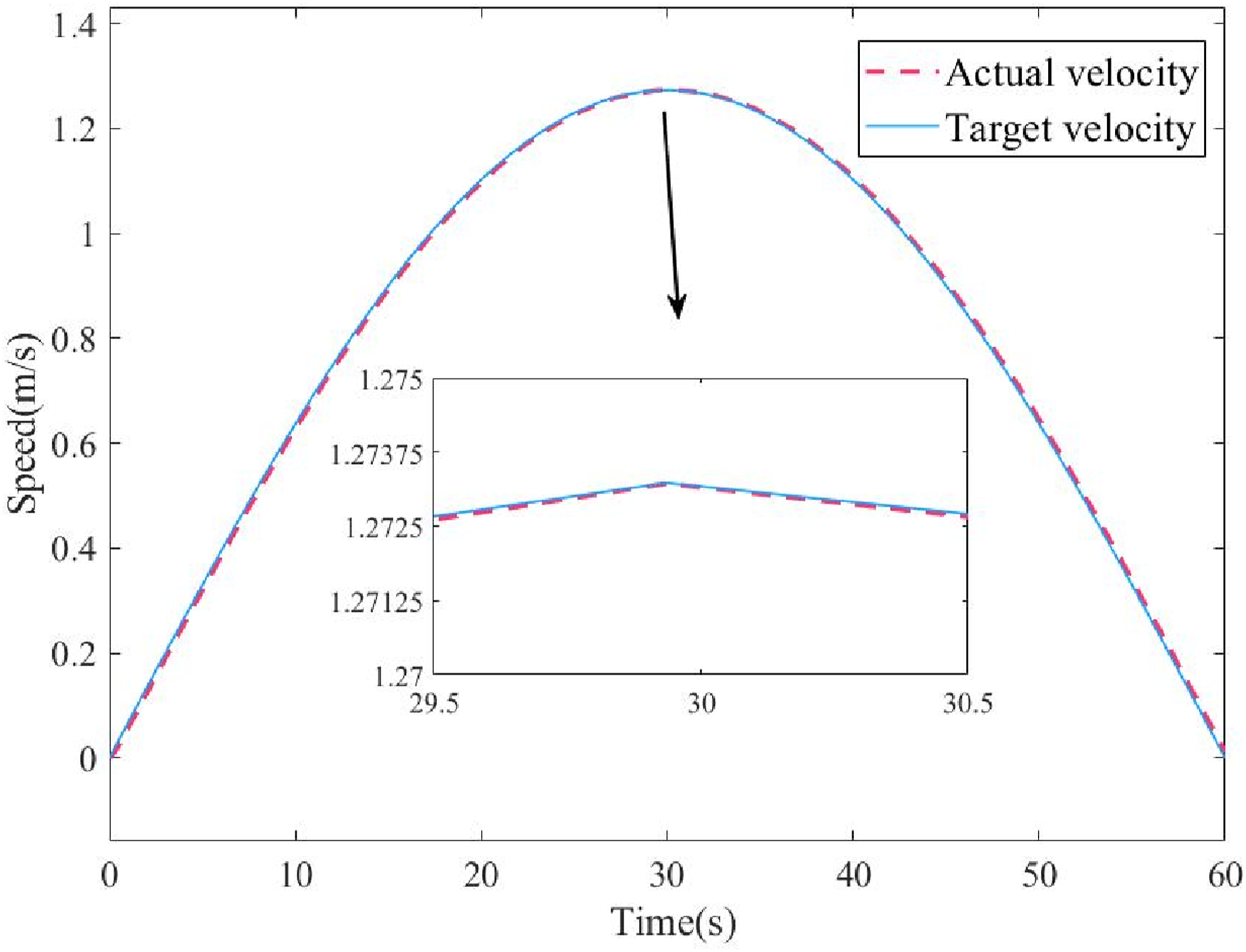
Initially the speed and acceleration of space mining robot are set, and the IAVOA-PID controller is used for motion control. As shown in the Figures 8 and 9, the space mining robot can have a good tracking effect on ideal trajectory and speed under this controller. Trajectory tracking result of space mining robot. Velocity tracking result of space mining robot.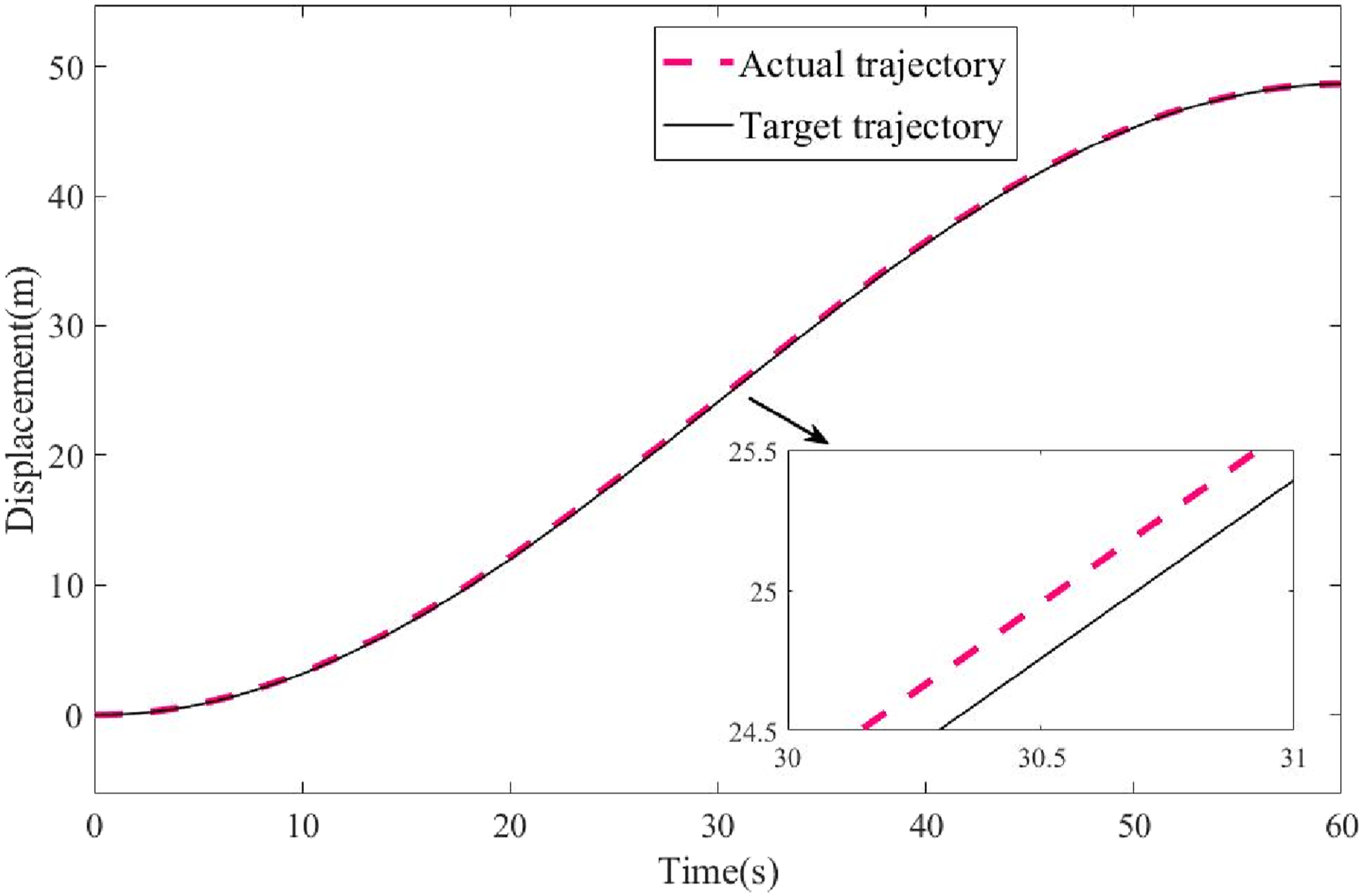
The trajectory error of space mining robot under this controller is less than 0.2 m and the velocity tracking error is less than 0.01 m/s, as shown in the Figure 10. Therefore, it can be seen from the experiment results that the proposed IAVOA-PID controller has excellent motion control performance for the space mining robot. Trajectory error and speed error of space mining robot.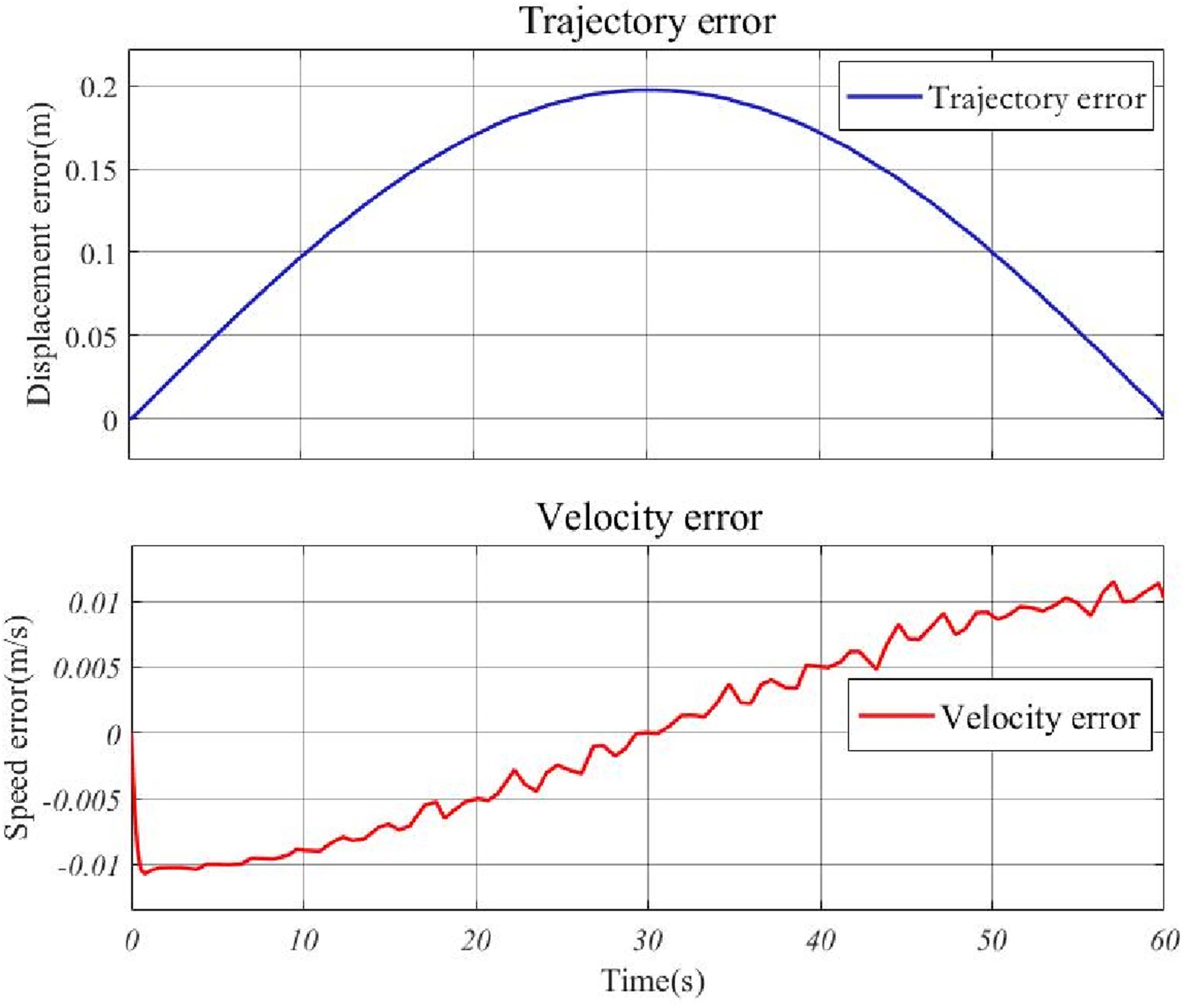
Conclusions and future works
In this paper, a space mining robot with IAVOA-PID controller is introduced to realize the precise motion when the robot operates in complex environments on the outer space surface of asteroids. Firstly, the structure of space mining robot is designed, and the kinematics model of robot’s wheels and the whole vehicle dynamics model in soft soil are established. Furthermore, the PID motion controller of space mining robot is developed, and an IAVOA algorithm is proposed to tune the PID parameters. The excellent optimization performance of IAVOA is validated by test results of nine benchmark functions. Lastly, the performance of IAVOA-PID controller is verified by simulations and experiments. The comparison results show that the IAVOA-PID controller responds quickly, has no overshoot and little steady-state error. Meanwhile, the space mining robot demonstrates excellent trajectory tracking effect and velocity tracking effect under the control of IAVOA-PID. The trajectory error is < 0.2 m and the velocity tracking error is < 0.01 m/s. As a result, the developed space mining robot can realize the precise motion with IAVOA-PID controller.
Although the proposed IAVOA-PID controller has demonstrated good results in motion control problems for space mining robot, it also has the room for improvement. Firstly, some complex disturbances in space cannot be fully simulated in the modelling and experimental validation phases, such as ultra-low temperature and strong radiation. In the future, we will further optimize the proposed method to consider the effects of complex space environment on the robots as much as possible. Secondly, the IAVOA has a significant advantage over the AVOA algorithm in terms of convergence speed and search accuracy, but it comes at the expense of time consumption. It still needs to be improved for practical applications where time consumption is more stringent. Therefore, the improvement mechanisms of swarm intelligence algorithms including the AVOA will be further explored in the future to strive for the overall improvement between time consumption and algorithm performance. Meanwhile, the IAVOA-PID controller proposed in this paper responds quickly, has no overshoot and little steady-state error, and the above characteristics can also be applied to aerospace, deep-sea rescue, deep-earth mining and other fields.
Footnotes
Authors’ note
Copernicus Publications remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Author contributions
X.L. and Z.L. conceived the project and design, decided on the methodology and supervised the work. B.W., M.R., D.H., R.S., H.W. and K.F. performed the simulation and experimental work, critical analysis and prepared the draft.
Declaration of conflicting interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: The contact author has declared that neither of the authors has any competing interests.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (No. 51975568), the Independent Innovation Project of ‘Double-First Class’ Construction of China University of Mining and Technology (2022ZZCX06), the Natural Science Foundation of Jiangsu Province (BK20231066), the Postgraduate Research & Practice Innovation Program of Jiangsu Province (KYCX24_2732) and the Graduate Innovation Program of China University of Mining and Technology (2024WLJCRCZL121).
Data Availability Statement
The datasets generated during and/or analysed for the current study are available from the corresponding author on reasonable request.