
Abstract
The vibratory roller’s compaction in the initial and middle stages is crucial for transforming loose subgrade filler particles into a dense state. The subgrade shows nonlinear characteristics of large and small plastic deformation. To describe these nonlinear characteristics, a new nonlinear model of vibratory roller-soil coupling is proposed. Initially, a two-degree-of-freedom model of the vibrating roller-subgrade system is established, considering the subgrade’s vibration. A small parameter is introduced to improve the elastic element of the frame shock absorber and the subgrade’s nonlinear hysteresis model. The analytical solution of the proposed nonlinear dynamic equation is solved and verified by the numerical solution. Subsequently, the vibrating wheel’s nonlinear dynamic responses are studied, including time-frequency domain, Poincare section, and bifurcation diagrams. It is found that during the initial stage, increasing excitation frequency or decreasing excitation force causes the vibrating wheel’s response to shift from “double period” to “single period.” In the middle stage, the vibrating wheel’s motion exhibits three states: “chaos,” “double period,” and “single period.” These nonlinear vibration response characteristics provide a theoretical foundation for selecting intelligent compaction parameters.
Highlights
1. A small parameter is introduced to improve nonlinear hysteresis model of the subgrade, which is more in line with the actual change of soil mass in compaction operation. 2. The dynamic response of the vibrating wheel is studied using the working parameter bifurcation method. 3. This research method provides a theoretical basis for the practical operation of vibration compaction and the selection of working parameters of intelligent compaction.
Introduction
Vibratory compaction is an important process in various earthwork projects to ensure the quality of subgrade construction and is widely applied in the construction of highways, railways, airports, and embankments. 1 Static pressure and excitation force are applied by vibratory rollers to induce compression deformation and reduce void ratio, achieving a certain degree of compaction to enhance the bearing capacity, impermeability, and stability of the subgrade. From a vibration mechanics perspective, the essence of vibratory compaction by rollers lies in the interaction between the vibrating wheel and the subgrade. 2 It represents a typical nonlinear dynamic behavior, particularly during the early and middle stages of vibratory compaction, where the mechanical characteristics of the subgrade mainly exhibit significant plastic deformation and small plastic deformation. 3 Investigating the nonlinear dynamic response of the roller-subgrade system during this process can provide a deeper understanding of the working mechanism and principles of vibratory compaction, thereby guiding the selection of optimal working parameters for practical compaction operations to improve the quality and efficiency of compaction.
Research on the relationship between vibrating rollers and the compacted subgrade has been conducted by many scholars, and various concentrated parameter models for the “vibratory roller-subgrade” system with multiple degrees of freedom have been established. Yoo T S and Selig E T 4 first proposed the classical two-degree-of-freedom mass-spring-damper dynamic model and analyzed the working mechanism of the vibrating roller, providing a basis for subsequent studies on the effects of operational parameters on roller performance. Machet.J.M and Morel G 5 considered the influence of the vibrating subgrade and established a three-degree-of-freedom dynamic model for the “frame-vibrating wheel-subgrade” system. They analyzed the grounding and bouncing conditions of the vibrating wheel and improved the theoretical research on the vibratory compaction system model. Zheng Shuhe and Lin Shuwen 6 proposed a four-degree-of-freedom model based on the structural characteristics of the roller. They analyzed complex situations such as vertical bouncing and horizontal slipping of the vibrating wheel and proposed measures to ensure the compaction effect of the subgrade. Jin Xiaoxiong 7 et al. analyzed the damping of each system and established a five-degree-of-freedom model. They solved and simulated the model, and proposed a method to determine optimal ride comfort. Huang Deng et al. 8 established a seven-degree-of-freedom mechanical model for the vibrating roller. They conducted dynamic analysis of the driver’s cabin and seat, and performed simulations using Matlab. The seven-degree-of-freedom model provided a more comprehensive analysis and theoretical guidance for the design of vibrating rollers. Although models with more degrees of freedom provide a more comprehensive representation of the system, the simulation process becomes more complex. When establishing the dynamic model of the vibratory compaction process, it is preferable to have a simplified model that ensures the feasibility of theoretical solutions and is consistent with practical working conditions. 9 Considering the convenience of simulation calculations and the ability to verify most regularities, as well as the ease of integration with subsequent nonlinear subgrade models, the two-degree-of-freedom concentrated parameter model is selected for theoretical and simulation analysis in this study. Most of the subgrade models in the above-mentioned models are linear models or directly ignore the mass of the vibrating subgrade. In the early and middle stages of compaction, the plastic deformation of the subgrade is significant, and the linear subgrade model cannot reflect the elastic-plastic changes of the subgrade during the compaction process. Moreover, the subgrade model is the basis for accurately representing and analyzing the interaction between the vibrating wheel and the subgrade. Therefore, some scholars have begun to consider the elastic-plastic deformation of the subgrade. GUAN Di and CHEN Lesheng 10 combined with actual operating conditions and established a nonlinear dynamic model of the subgrade that can reflect the elastic-plastic deformation of the subgrade and the bouncing of the vibrating wheel, discovering chaotic phenomena. Imran et al. 11 proposed a “vibrating roller-subgrade” nonlinear model considering the elastic-plastic deformation of the subgrade and obtained nonlinear responses of the vibrating wheel, verifying the feasibility of the model. Some scholars have proposed nonlinear models for the hysteresis deformation characteristics of the subgrade under load, which exhibit viscoelastic-plastic nonlinear characteristics. 12 CAUGHY 13 first proposed the bilinear symmetric hysteresis model to analyze the hysteresis characteristics exhibited by materials during deformation, which has been widely used in nonlinear research on vibratory compaction. Zheng Shuhe and LIN Shuwen 14 based on the study of the relationship between the force and displacement of the subgrade undergoing elastic-plastic deformation, proposed a nonlinear asymmetric hysteresis model and analyzed the influence of different operating parameters on the response of the vibrating wheel. Among them, Grabe J 15 considered the different deformations of the subgrade during loading and unloading throughout the compaction process and proposed a triangular hysteresis deformation characteristic model, which is the most representative. During the process of vibratory compaction, the interaction between the vibrating wheel and the subgrade is a complex and dynamic nonlinear dynamic process. The variation of subgrade parameters can affect the response of the vibrating wheel, and changes in the working parameters of the roller can also affect the compaction effect of the subgrade. 6 Lewis 16 established a dynamic model of the vibrating wheel and the subgrade to study the relationship between the excitation frequency of the roller and the compaction degree of the subgrade. Shen P and Lin S 17 analyzed the response of the vibratory roller under different working parameters using a hysteresis model and proposed methods to avoid chaos. Lun Liu et al. 18 conducted dynamic analysis of the compaction model to improve compaction efficiency and proposed a method to adjust the excitation frequency and excitation force amplitude of the roller. Pietzsch D and Poppy W 19 determined the optimal working parameters of the roller by combining theoretical research and field experiments, obtaining the optimal range of working parameters. From the above literature, it can be seen that the selection of working parameters for vibratory compaction is closely related to the dynamic response of the vibrating wheel and the compaction degree. Moreover, when the compaction conditions and roller models are different, the selection of working parameters also varies. In order to ensure that the roller is in a stable working state during the compaction process and achieve a better compaction effect on the subgrade, it is necessary to analyze different conditions and roller models. Therefore, based on the initial and middle stages, this paper obtains the bifurcation diagram of the response of the vibrating wheel under different frequencies and excitation force amplitudes, which intuitively shows the influence of changes in working parameters on the response of the vibrating wheel under different conditions.
Based on the nonlinear characteristics between the vibrating roller and the subgrade during the initial and middle stages of the compaction process, this paper obtained bifurcation diagrams for different frequencies and excitation forces, and the influence of different working parameters on the dynamic response characteristics of the vibrating wheel was comprehensively analyzed in this paper. The structure of this paper is as follows: In second section, a dynamic model of the vibrating roller-soil system is established; in the third section, a small parameter is introduced to improve the elastic element of the shock absorber and nonlinear hysteresis model of the subgrade, obtaining a coupled system nonlinear dynamic model. The perturbation method is used to obtain the approximate analytical solution of the system during the initial loading stage of compaction; in the fourth section, based on the bifurcation diagrams of the system with frequency and excitation force as parameters, the response characteristics of the vibrating wheel under different frequencies and excitation forces during the mid-stage of compaction are analyzed; in the fifth section, a systematic summary of the above analysis and conclusions is provided, which provides a theoretical reference for the rational adjustment of working parameters in the field operation of vibrating compaction.
Dynamic model of the vibrating roller-subgrade coupled system
A two-degree-of-freedom dynamic model of the vibrating wheel-subgrade coupled system is established, as shown in Figure 1. Before establishing the model, the following assumptions are made to hold
20
: a. The sliding eccentric block in the vibrating wheel rotates around the wheel center axis at a constant angular velocity. b. The vibrating wheel and the frame are treated as rigid bodies with concentrated masses, and the overall mass distribution is symmetric in the radial and axial directions. c. All damping and elastic elements used in the vibrating wheel-subgrade model are assumed to be massless. d. The centrifugal force generated by the rotational motion of the eccentric block of the vibrating wheel only has a vertical component acting on the model. e. The mass of the subgrade being compacted is 0.3 times the mass of the vibrating wheel.
21
Dynamic model of the “vibrating roller-subgrade” coupled system.
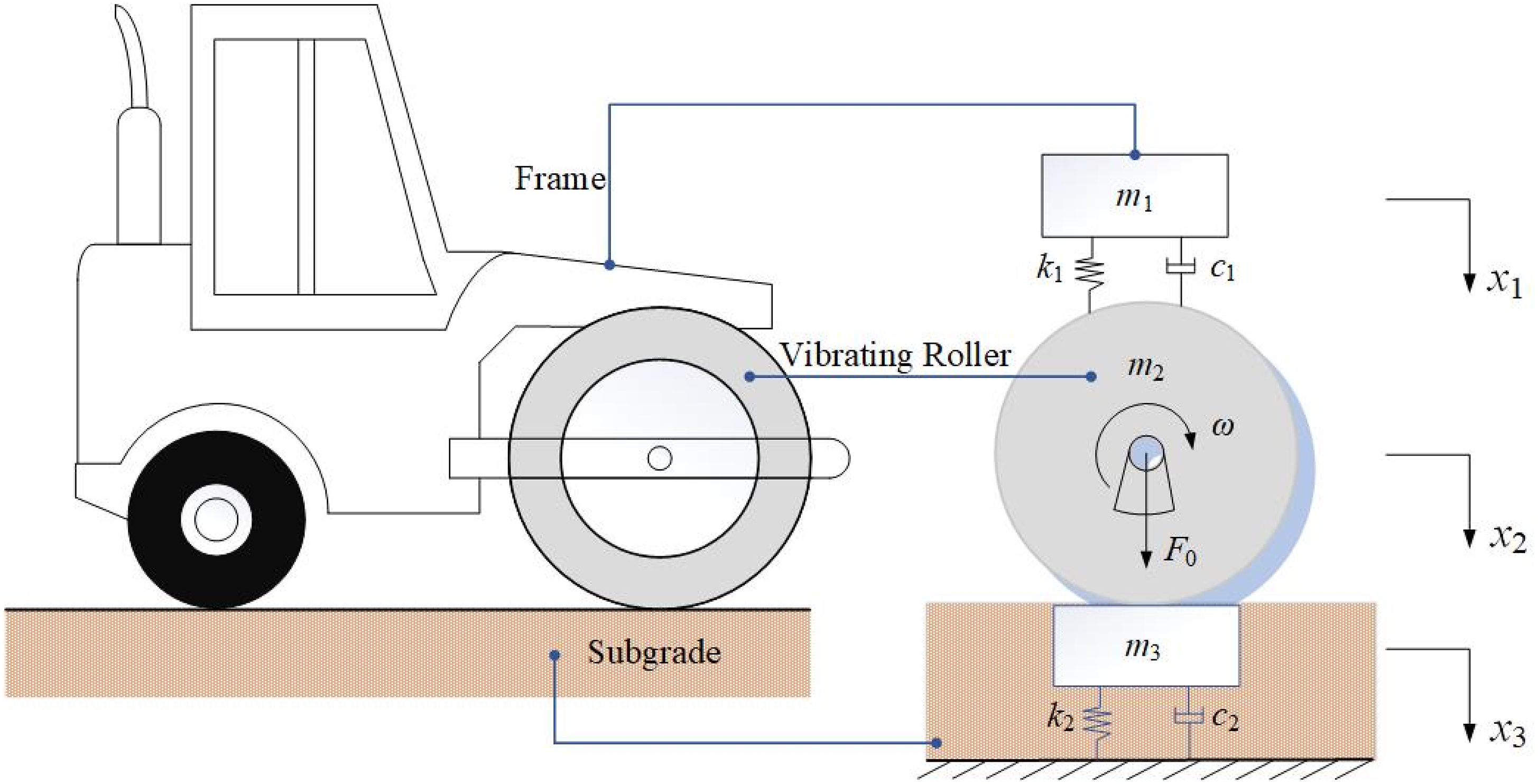
Figure 1 presents the dynamic model of the vibrating roller-subgrade coupled system under the ground contact condition. The model is subjected to force analysis, assuming continuous contact between the vibrating wheel and the subgrade during the compaction process, treating them as a single entity. The static equilibrium position is taken as the coordinate origin, and the dynamic equations are obtained as follows (Equation (1))

Constructing a nonlinear dynamic model of the “vibrating roller-subgrade” coupled system
The subgrade model depicted in Figure 1 is a linear model. In previous studies, the parameters of the subgrade were typically assumed to be fixed values that do not vary during the compaction process. The elastic-plastic changes in the subgrade during compaction cannot be captured by this model. 22 Therefore, this model is more suitable for conditions where the subgrade parameters exhibit minimal changes in the late stages of compaction, but less applicable to situations where the subgrade undergoes significant elastic-plastic changes in the early to middle stages of compaction. 23
During the compaction process, hysteresis characteristics are exhibited by the plastic deformation of the subgrade. A hysteresis loop is formed by the subgrade’s restoring force and displacement under the excitation force of the vibrating wheel, and the shape of this loop varies with the changes in the subgrade parameters.
22
The relationship between the restoring force and displacement under different conditions is illustrated in Figure 2. Relationship between the restoring force and displacement of the subgrade at different compaction stages.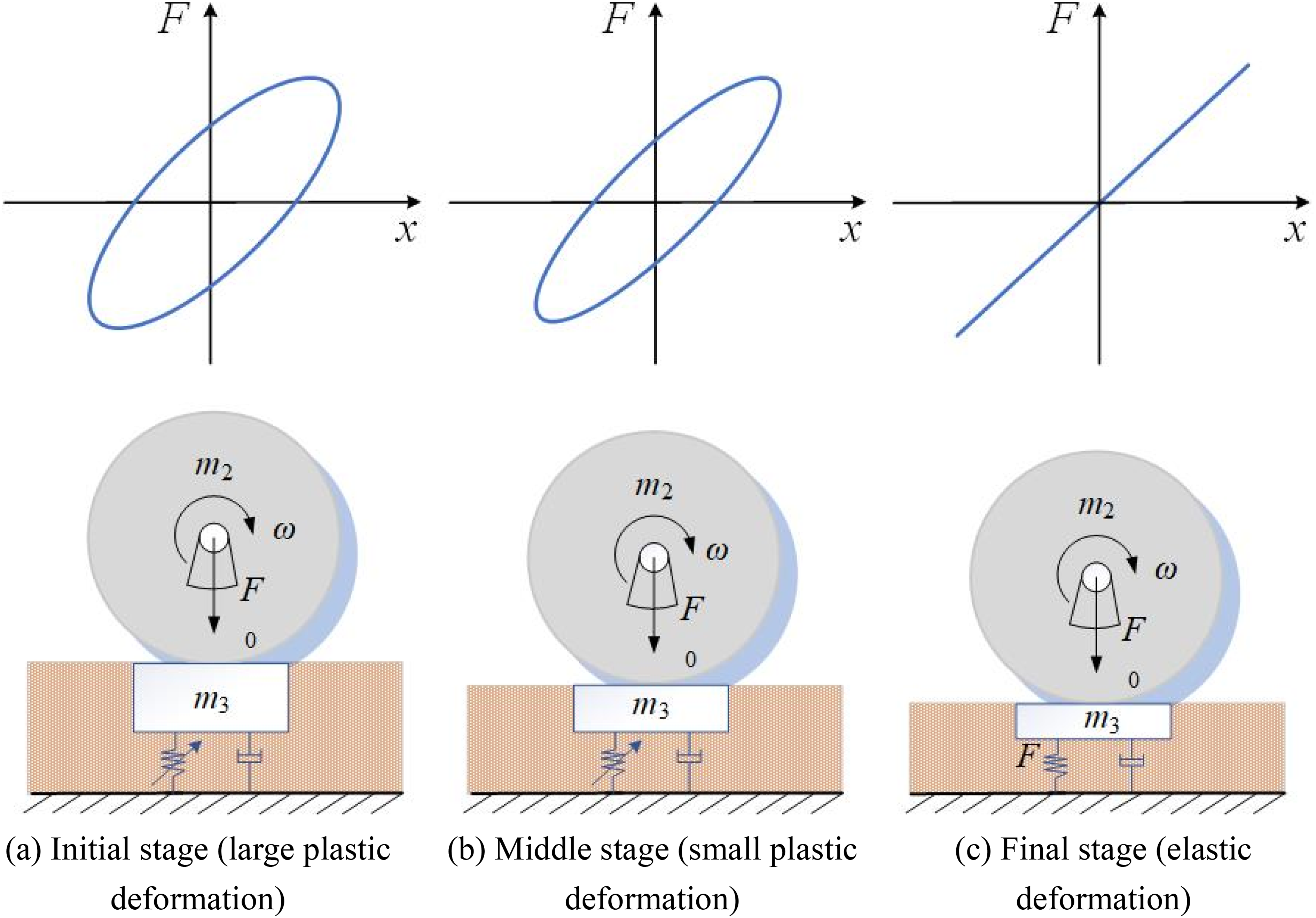
According to Figure 2, it can be observed that in the initial stage condition (Figure 2(a)), significant elastic-plastic behavior is exhibited by the subgrade, with a pronounced hysteresis effect and a larger hysteresis loop. As the compaction process progresses, in the middle stage of compaction (Figure 2(b)), the density and stiffness of the subgrade are continuously increased, resulting in a reduction in plastic deformation and a gradual decrease in the size of the hysteresis loop. In the final stage of compaction (Figure 2(c)), plastic deformation disappears, and only elastic deformation is present, resulting in a linear relationship between the restoring force and displacement. Therefore, it can be concluded that capturing the hysteresis characteristics exhibited by the subgrade in the early to middle stages is crucial for a more accurate representation of the vibrating wheel’s response during actual compaction operations.
Construction of a nonlinear elastic-plastic model for the subgrade
To capture the hysteresis effects exhibited by the subgrade during the loading and unloading processes in the early- and mid-stages of compaction, the traditional linear subgrade model is replaced by the most representative triangular hysteresis model to investigate the nonlinear behavioral characteristics of the subgrade. The triangular hysteresis model for the subgrade is illustrated in Figure 3: Triangular hysteresis model for the subgrade.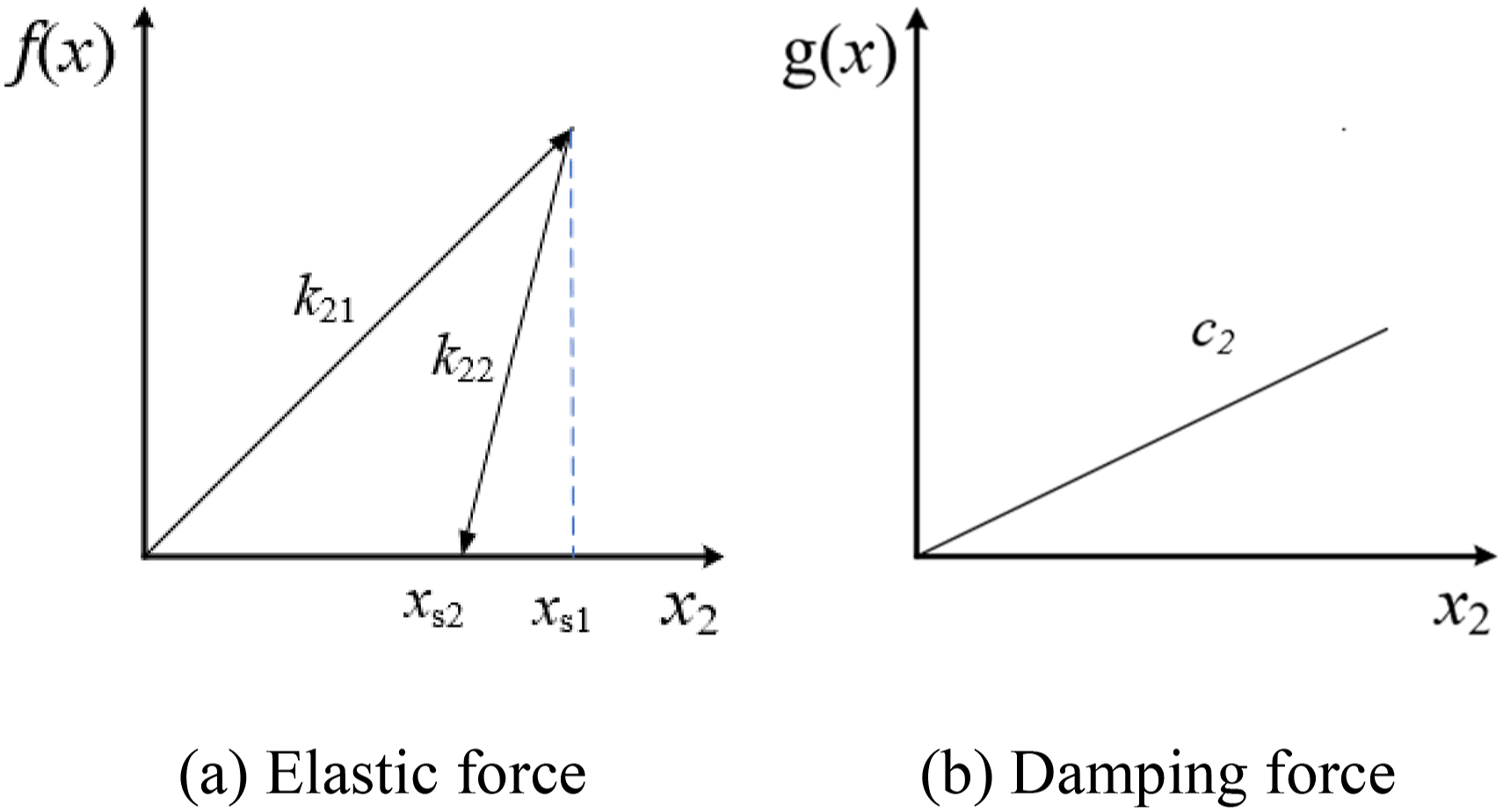
where the nonlinear elastic force and linear damping force are represented by equations (2) and (3), respectively


The aforementioned triangular hysteresis model can reflect the nonlinear elastic force experienced by the subgrade throughout the compaction process. Although it is more realistic than the linear model, Pietzsch
19
proposed that the subgrade undergoes nonlinear elastic-plastic deformation during the loading stage. The triangular hysteresis model only uses fixed subgrade parameters to describe the elastic characteristics of the subgrade during loading, failing to capture the nonlinear elastic force exerted on the subgrade during the loading process. Therefore, it still has limitations. Additionally, the vibration absorber at the frame of the compactor in practice also exhibits nonlinearity. In this study, the spring at the vibration absorber is considered as a variable stiffness spring to represent its nonlinear characteristics, which is more in line with reality. Considering Jia Tong’s
25
approach of introducing a small parameter to express the nonlinear resistance in nonlinear vibratory compaction systems, this study adopts a similar method to introduce a small parameter to express the nonlinear elastic force experienced by the vibration absorber and subgrade during the loading stage, as shown in Figure 4. Nonlinear elastic force-displacement characteristic curve.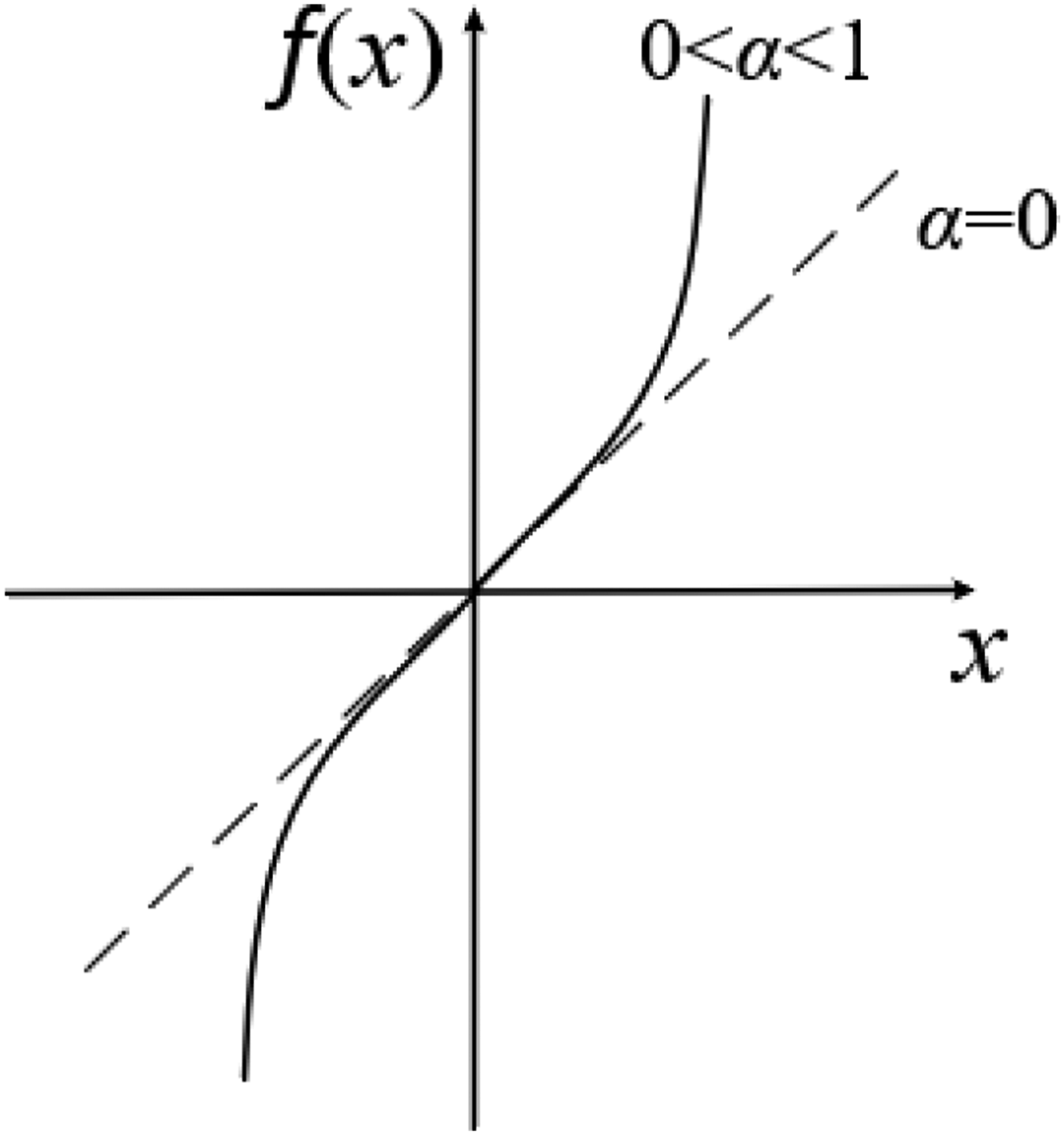
According to Figure 4, it can be observed that the nonlinear elastic force-displacement characteristic curve approximates linearity for small deformations, while it exhibits clear nonlinearity for large deformations. The nonlinear elastic force can be constructed as shown in

The improved nonlinear elastic force experienced by the vibration absorber and subgrade can be expressed as equations (5) and (6), respectively


Compared to the scenario in which small parameters are not introduced, the inclusion of these parameters accounts for the variable stiffness spring and the nonlinear elastic forces experienced by the subgrade during the loading stage. This approach allows the nonlinear dynamic model to better align with actual working conditions and more accurately captures the variations of the vibration absorber’s elastic component and the subgrade throughout the compaction process.
Solution of the system equations
In the dynamic analysis of the vibratory compaction process, an improved system model is adopted to obtain the dynamic equations for the loading stage of the vibratory roller-subgrade system, as shown in equation (7)

To solve the equation (7), the perturbation method is used for an approximate solution. When

Substituting equation (8) into (7) and setting the sum of coefficients of the same order to zero when

For convenience in calculation, the dynamic equation of equation (9) is approximated and divided into two parts. One part does not include the small parameter, and the other part includes terms of the same order that have been omitted. The first part can be expressed as follows

The vibrating drum continuously operates under the action of harmonic excitation force, so its steady-state response can also be represented in a harmonic form. Let the solution of the dynamic equation (10) be

Substituting




The second part of equation (9) can be expressed as follows

Let the solution of the dynamic equation (12) be







Comparison of numerical and analytical solutions
In this study, the SaKai SV 510D intelligent vibratory roller is used as the research object. The model parameters are as follows: the frame mass is Comparison between analytical solution and numerical solution.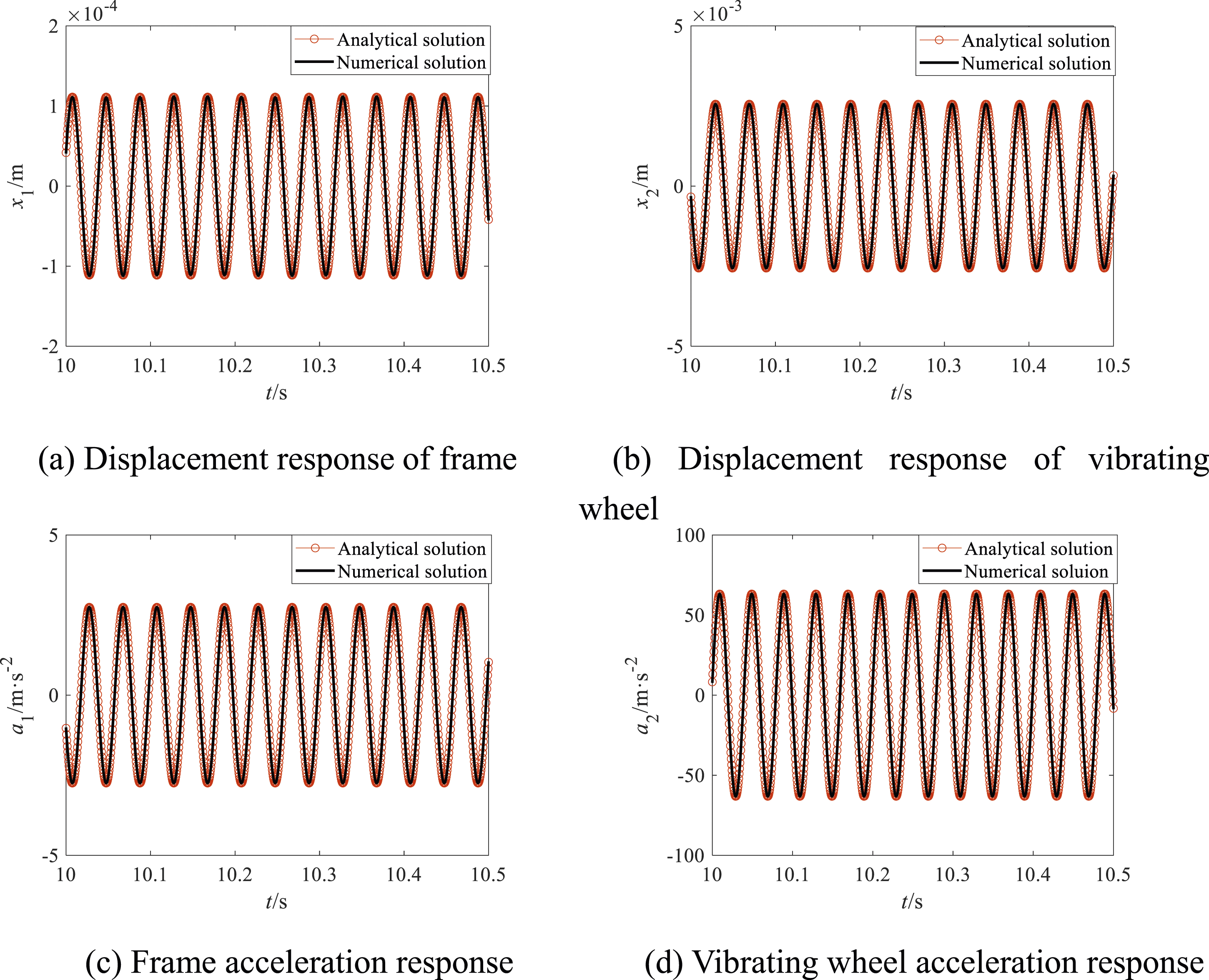
The analytical solution curve of the frame and vibrating wheel response after the system reaches a stable state is represented by red circles in Figure 5, while the numerical solution curve is represented by solid black lines. It can be observed from the Figure 5 that the analytical solution aligns well with the numerical solution, thereby validating the accuracy of the analytical solution. Therefore, when the parameters are small, the perturbation method can be employed for solving and theoretical analysis of the vibratory roller-subgrade system.29,30
Determination of the compacted subgrade mass
In actual compaction operations, the quality of the subgrade varies continuously with vibration, and the variation is related to various factors such as the type of compactor, type of subgrade fill, degree of subgrade compaction, and compactor operating parameters. According to relevant literature, the quality of vibrating subgrade is approximately 0.3 times the quality of the vibrating wheel. For example, reference 21 takes the Sakai SV 510D roller as the research object and points out that
A large number of simulation analyses have been conducted regarding the impact of this parameter on the dynamic properties. The simulation calculated the response of the vibrating wheel within the range of the subgrade mass being 0.2–0.4 times the mass of the vibrating wheel at steady state, as shown in Figure 6. It can be observed from the figure that this parameter (0.2–0.4 times) has a relatively small impact on the dynamic response of the coupled system. As this paper mainly focuses on the response characteristics and variation patterns of the vibrating wheel-subgrade coupled system under different compaction stages and operating parameters, the variation in subgrade mass does not affect the response characteristics and variation patterns of the coupled system. Discrepancy in compacted subgrade mass.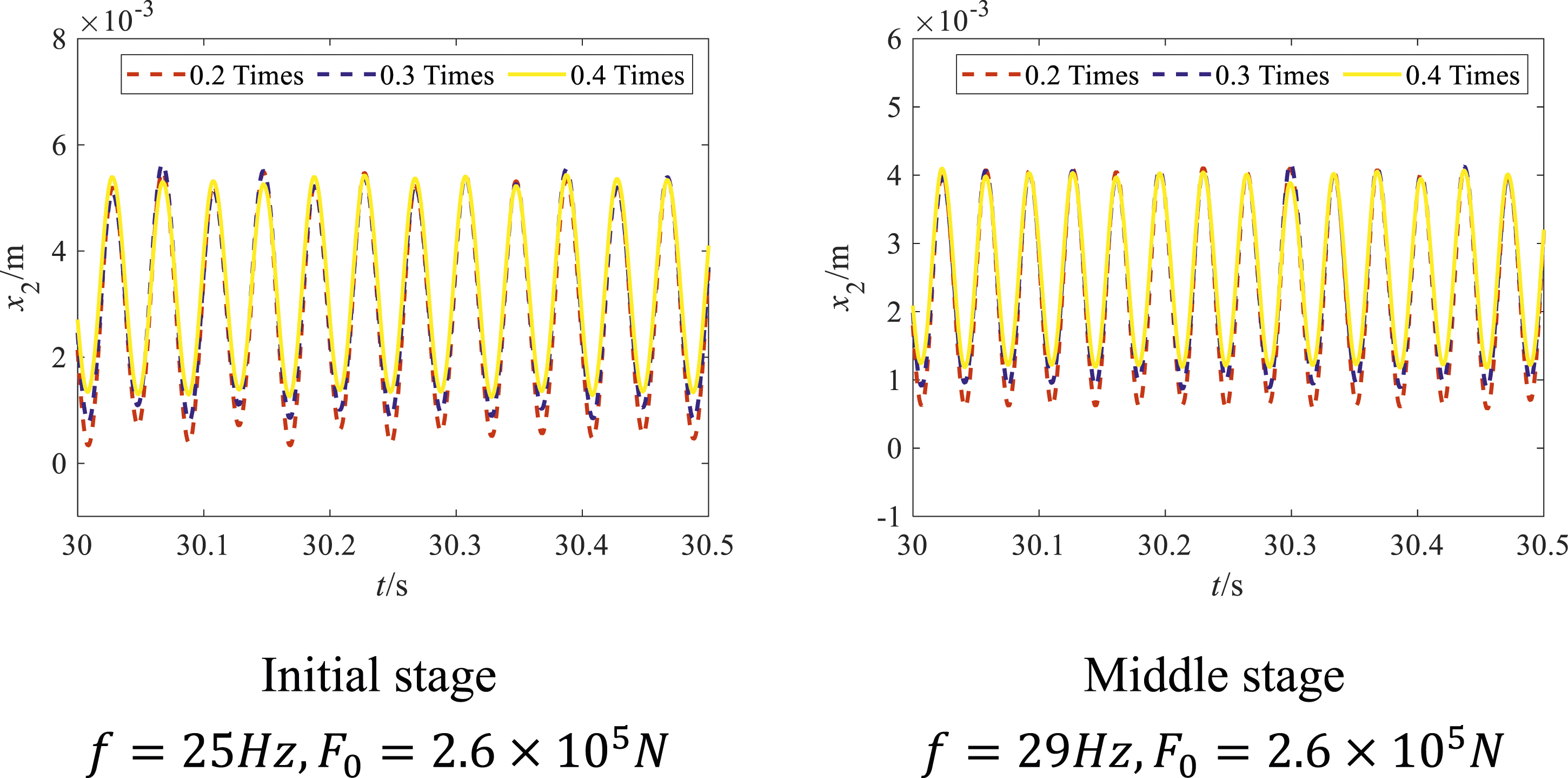
Nonlinear dynamics analysis
Due to the continuous contact between the vibrating wheel and the subgrade during the initial and middle stages of compaction, Ren Chaohui et al.
31
divided the motion process into three cases based on the variation of the elastic-plastic forces exerted on the vibrating wheel at different positions. These cases include the elastic-plastic force during the loading process, the elastic-plastic force during the unloading process, and the plastic deformation force during the unloading process. The corresponding motion differential equations for these cases are shown in equation (14)




Analysis of the elastic-plastic force during loading, unloading, and plastic deformation can clearly show the elastic-plastic changes of soil during the whole compaction process in the early and middle stages of compaction. Compared with ignoring or linearly simplifying these nonlinear characteristics, these three situations are closer to the actual stress of soil during compaction.
Nonlinear response in the initial compaction period
In the initial stage of the compaction process, a dynamic analysis of the vibratory roller-subgrade system is conducted using the improved subgrade model. In order to study the dynamic response of the vibrating wheel under different operating parameters, the initial stiffness and damping of the subgrade are considered. Bifurcation diagrams are plotted with the excitation frequency Bifurcation diagram during initial compaction.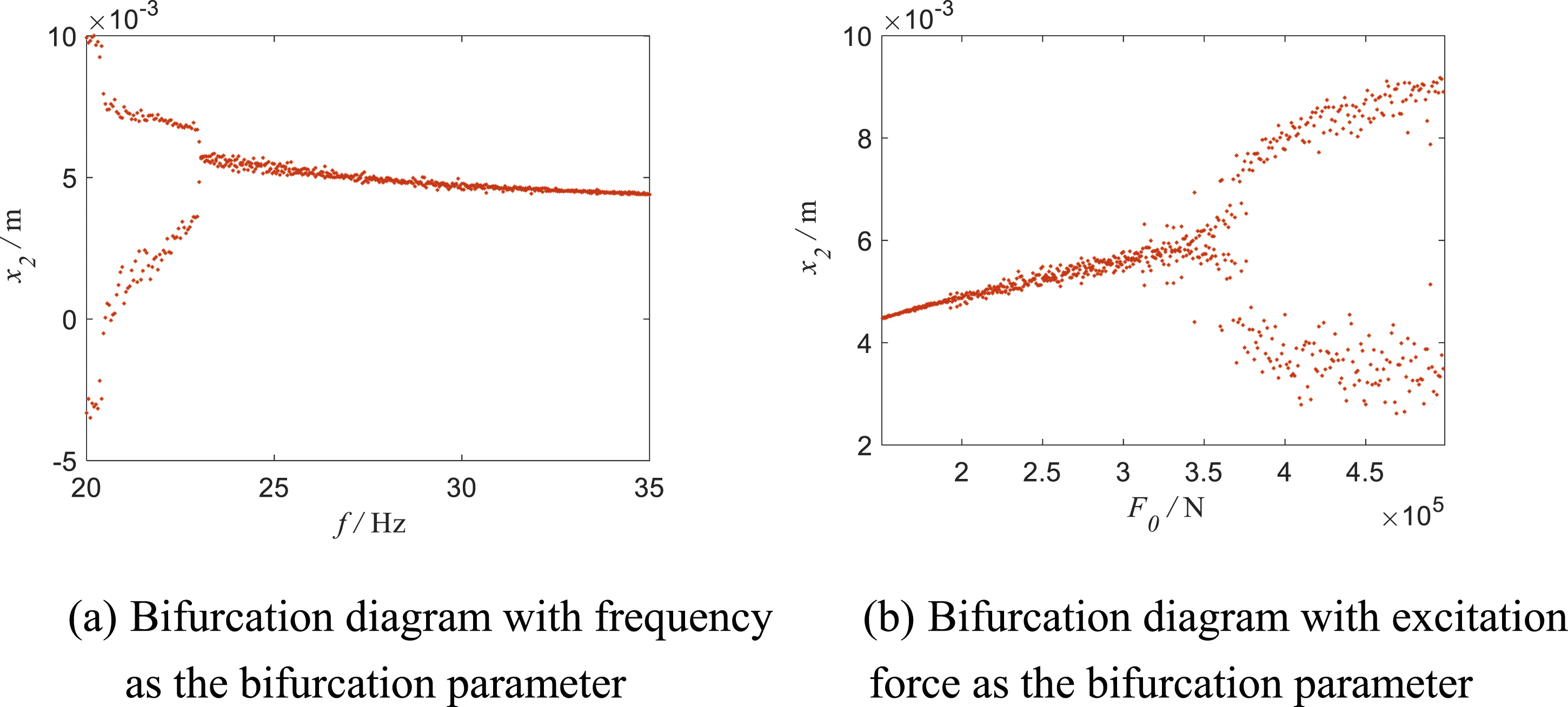
From Figure 7, it can be observed that when the excitation frequency
From Figures 7(a) and (b), it can be observed that for both cases of excitation frequency Nonlinear dynamic response in the initial compaction stage. (f = 22Hz, F0 = 2.6 × 105N) Nonlinear dynamic response in the initial compaction stage. (f = 25Hz, F0 = 4.0 × 105N)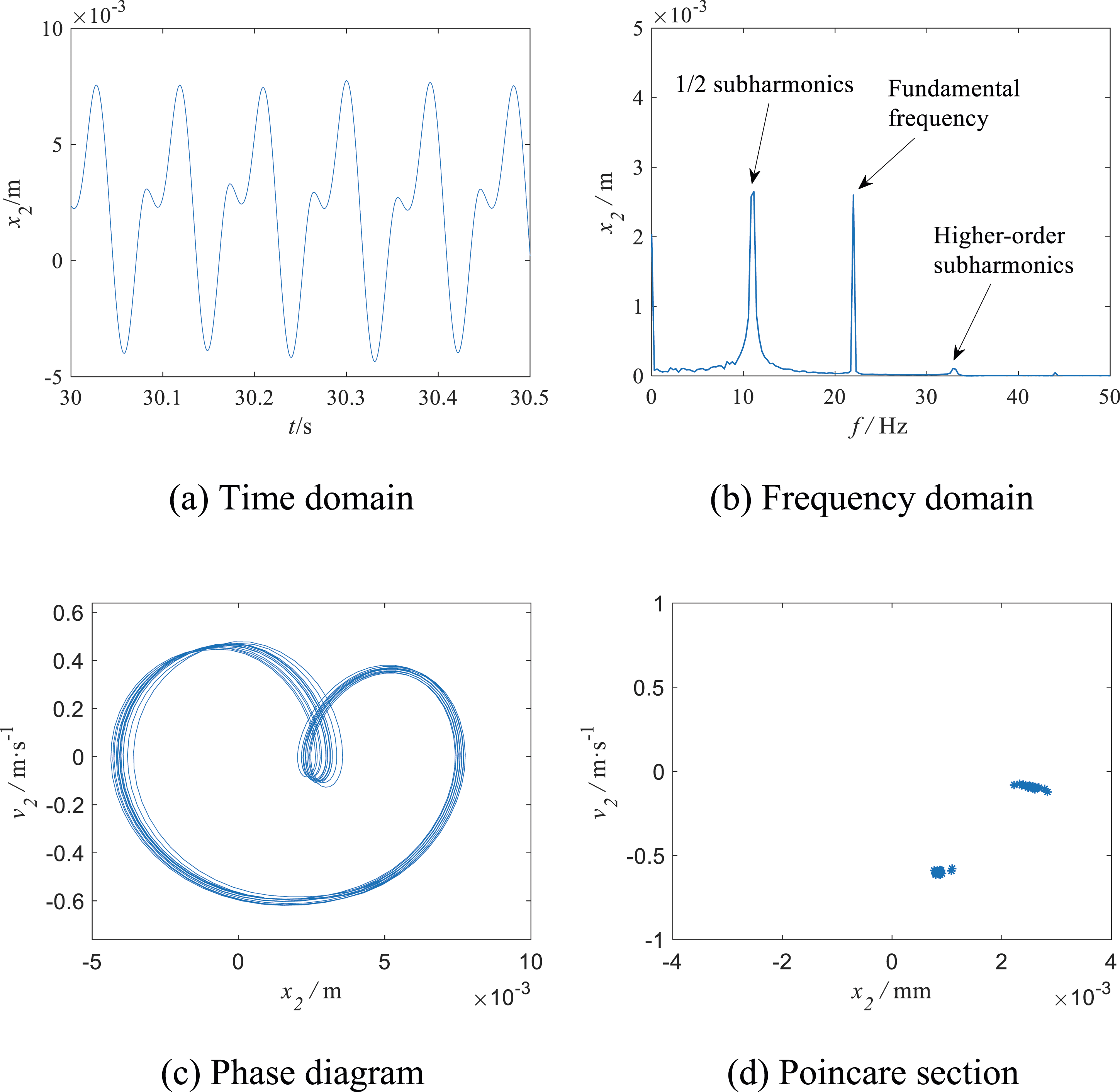
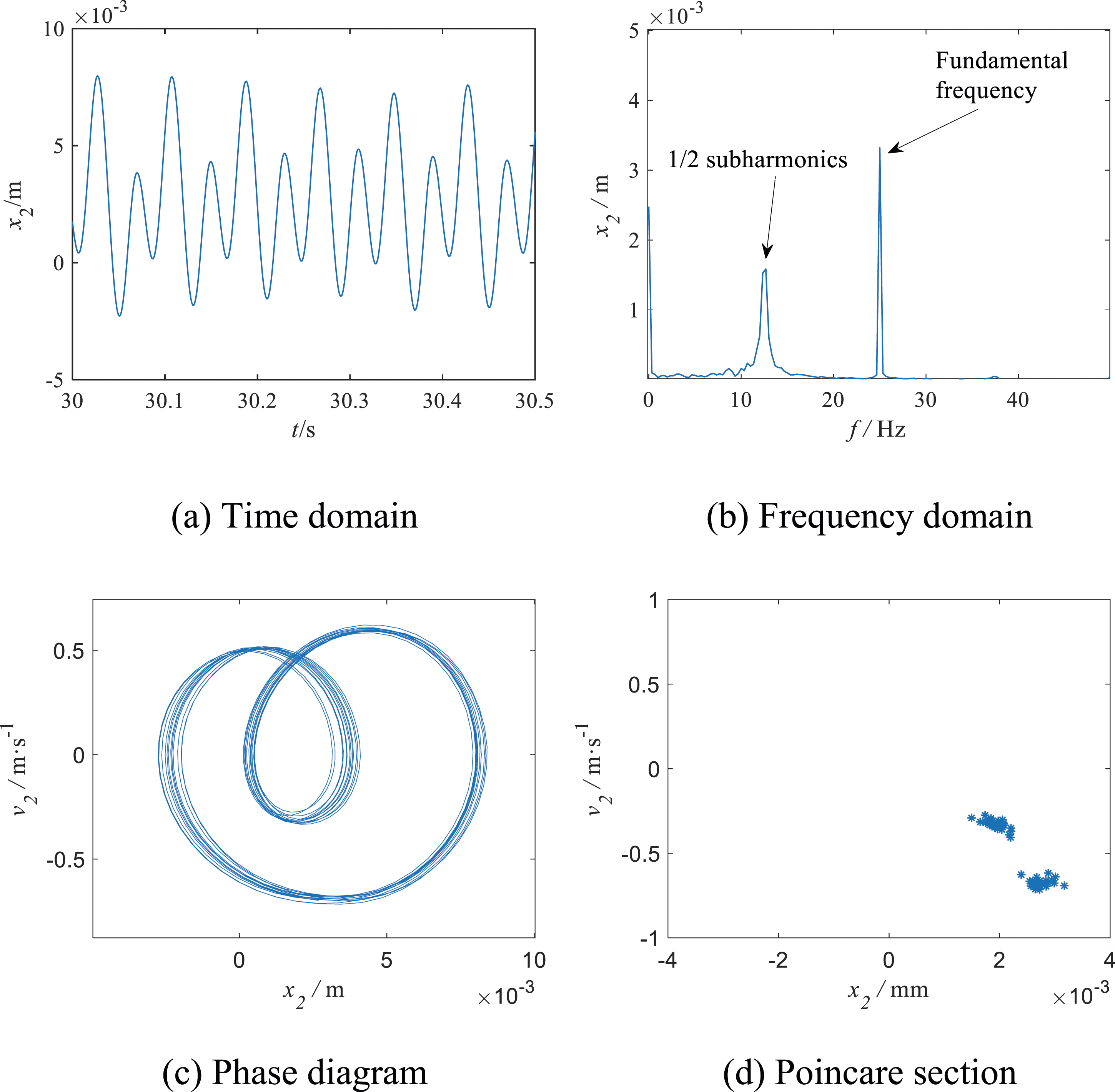
From Figures 8(a) and 9(a), it can be observed that in the time-domain plot, there are two peaks within each period, indicating a multi-period motion state. Moreover, the displacement of the vibrating wheel has negative amplitude, indicating that the motion of the vibrating wheel will exceed the initial surface of the uncompacted subgrade, resulting in a significant “double jump” phenomenon, which can lead to harmful compaction of the subgrade. In the frequency-domain plots of Figures 8(b) and 9(b), the presence of 1/2 subharmonics and higher-order harmonics is observed. The phase plots in Figures 8(c) and 9(c) exhibit “multi-ring” patterns, and the Poincare section plots in Figures 8(d) and 9(d) show distribution near two points, all indicate that the vibrating wheel is in a multi-period motion state.
When the excitation frequency is Nonlinear dynamic response in the initial compaction stage. (f = 25Hz, F0 = 2.6 × 105N)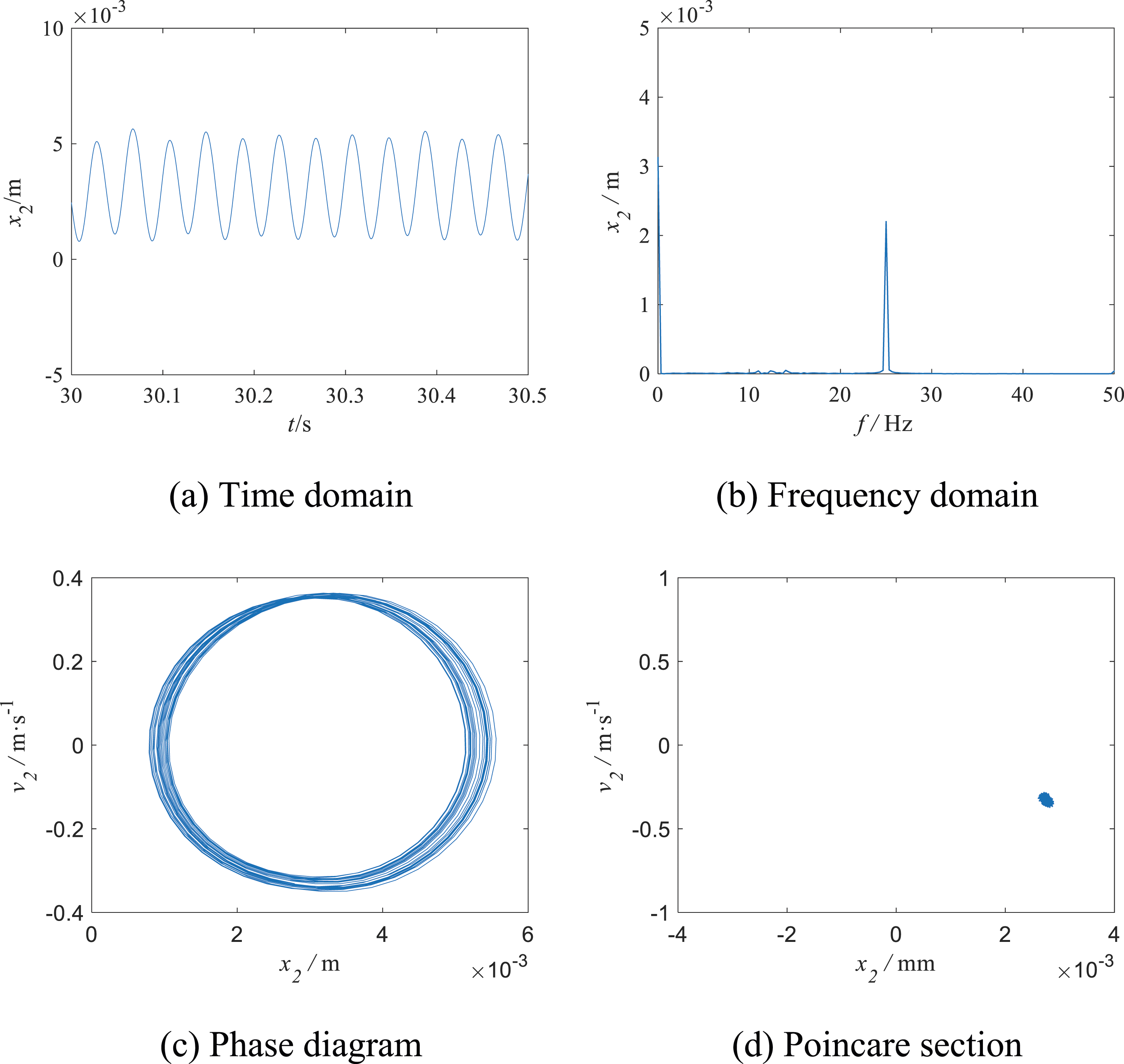
Based on the analysis of Figures 8–10, it can be concluded that as the frequency increases or the excitation force decreases, the response of the vibrating wheel transitions from a multi-period state to a stable single-period state. From the time-domain plot in Figure 10(a), it can be observed that the subgrade undergoes significant elastic-plastic deformation, and the amplitude of the vibrating wheel remains above zero, indicating that the vibrating wheel is always in contact with the ground, which is beneficial for the compaction process. In Figure 10(b), only one dominant frequency is present, and subharmonics and higher-order harmonics disappear. The phase plot of the vibrating wheel transitions from the “multi-ring” pattern in Figures 8(c) and 9(c) to the “single-ring” pattern in Figure 10(c). The Poincare section plot also transitions from the distribution near two points in Figures 8(d) and 9(d) to the vicinity of a single point in Figure 10(d), indicating that increasing the frequency or decreasing the excitation force in the initial compaction stage helps the vibrating wheel transition from unstable multi-period motion to stable single-period motion.
Nonlinear response in the middle compaction period
As the compaction process progresses, the stiffness of the subgrade increases while the damping decreases. When the compaction conditions transition from the initial stage to the middle stage, subgrade parameters are taken Bifurcation diagram during middle compaction of vibrating wheel Figure.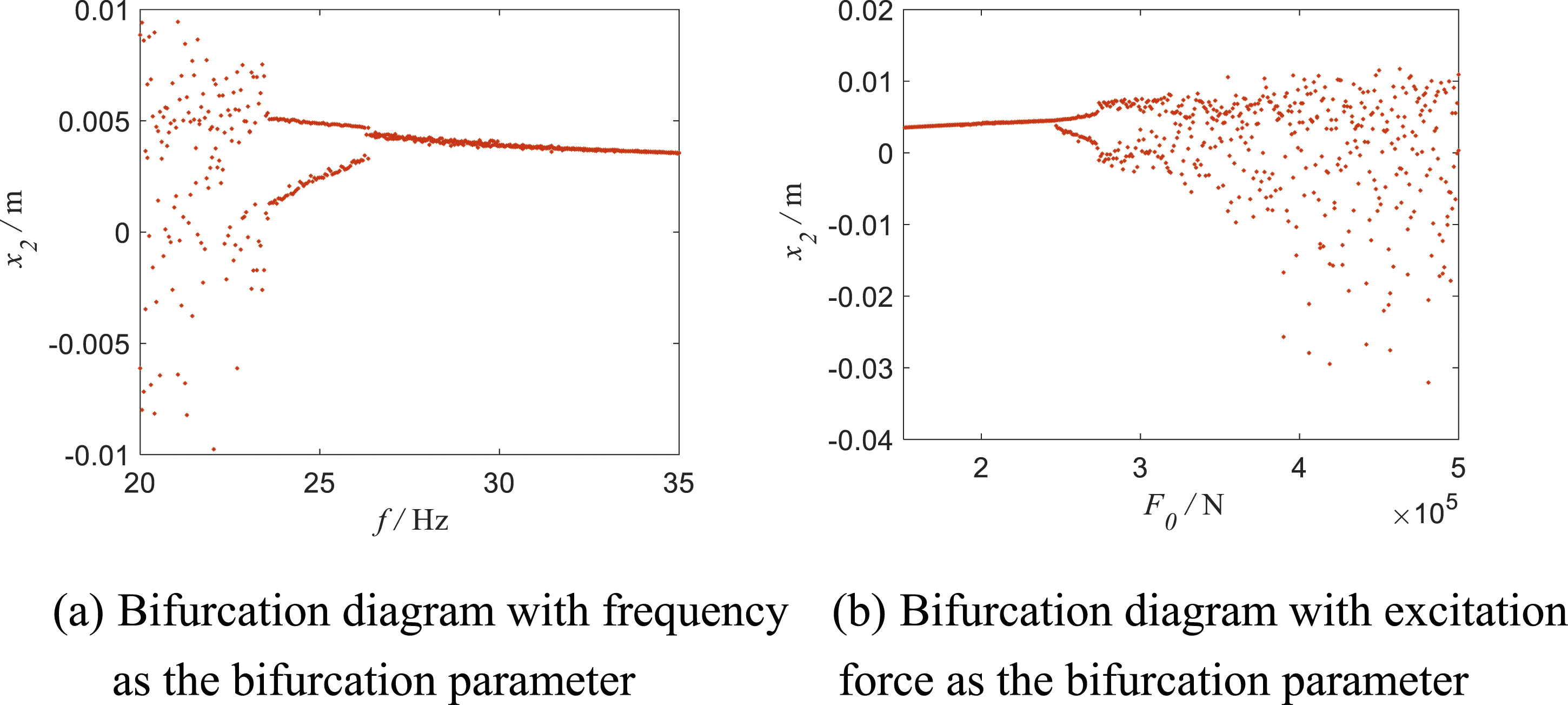
From Figure 11, it can be observed that the dynamic response of the vibrating wheel becomes more complex when the compaction process reaches the middlestage. When the excitation frequency (excitation force) is in the range of
Based on Figures 11(a) and (b), it can be observed that when the frequency Nonlinear dynamic response in the middle compaction stage. ( Nonlinear dynamic response in the middle compaction stage. (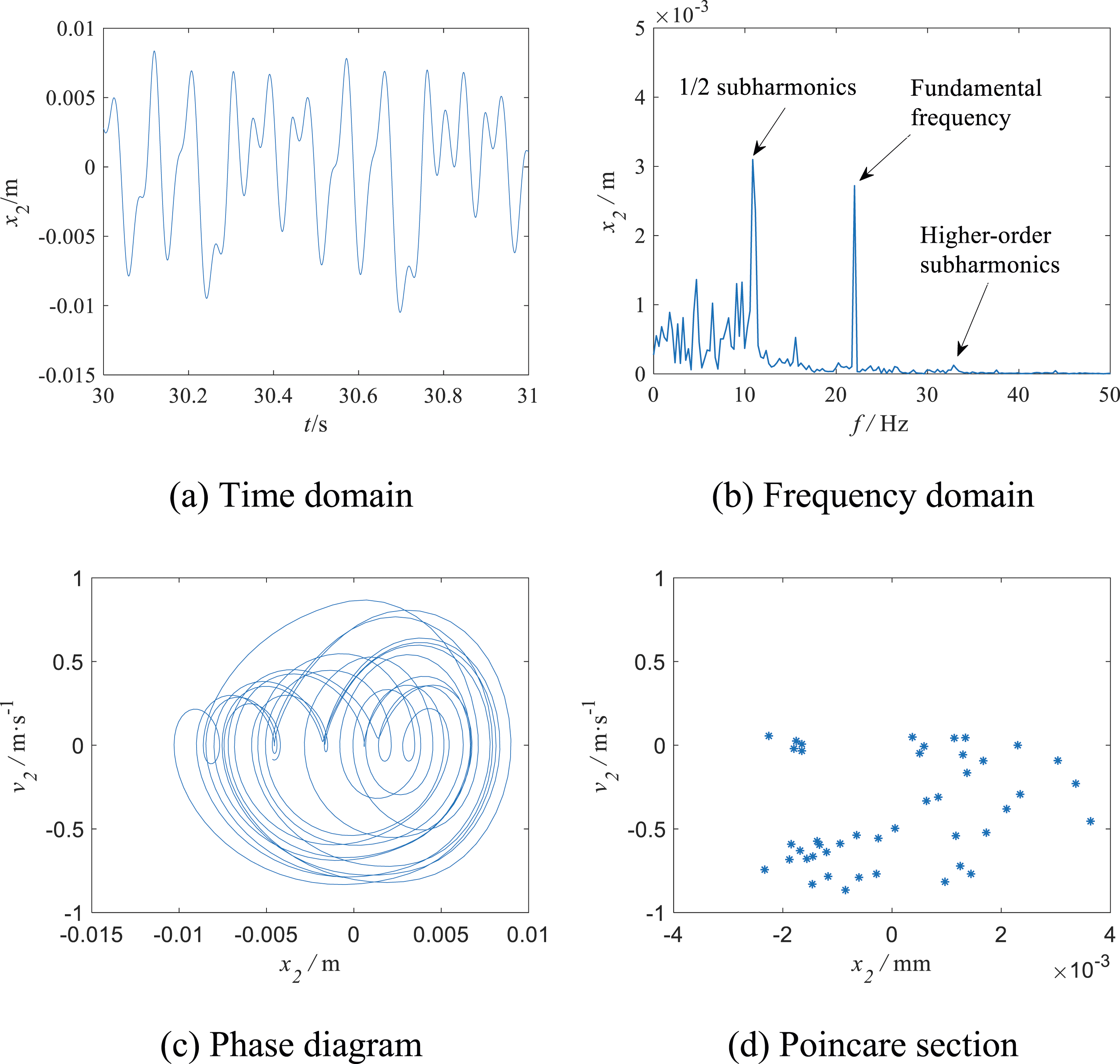
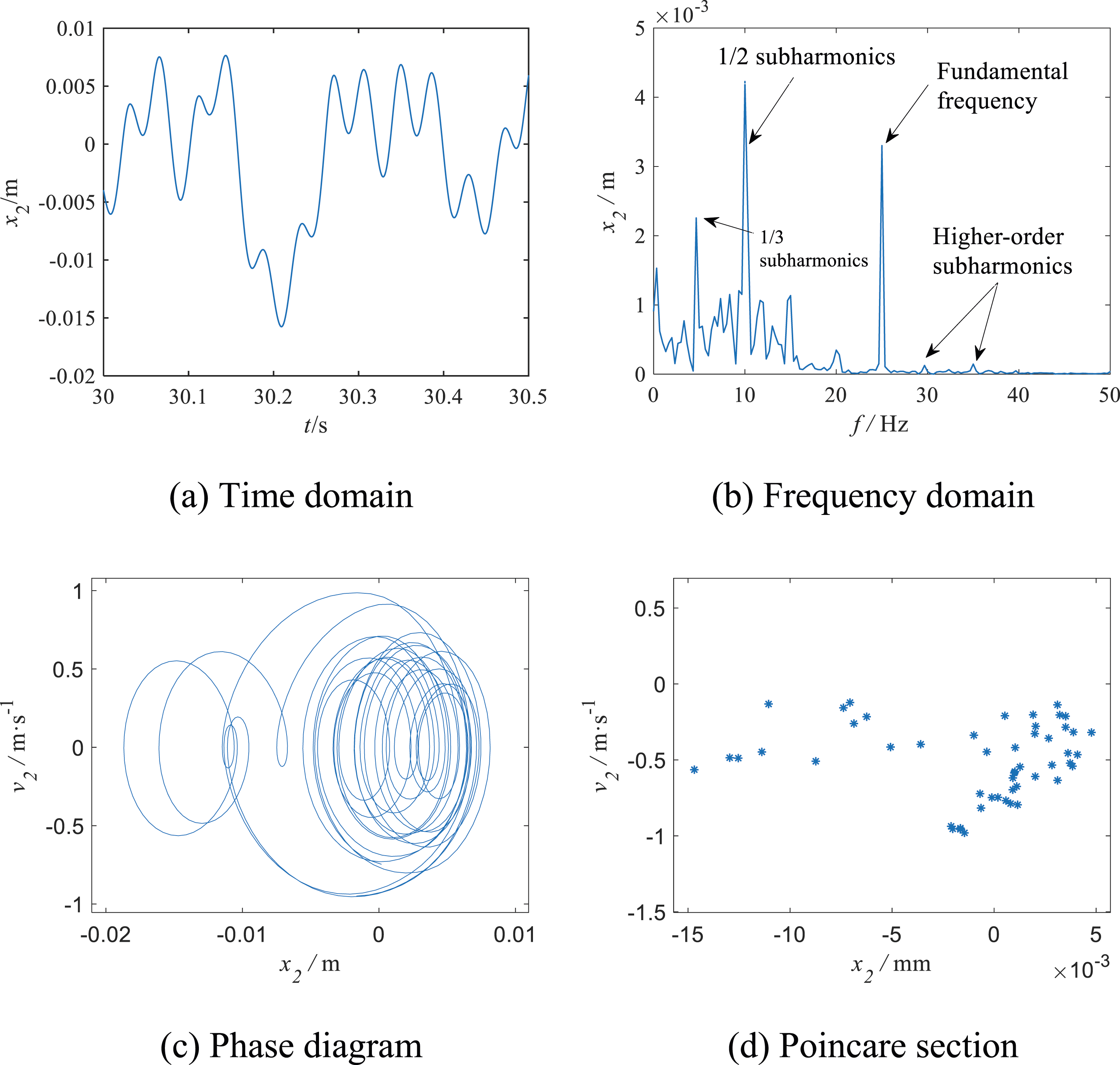
Analyzing Figures 8 and 12 (Figures 9 and 13), it can be concluded that when the excitation frequency
When the excitation frequency is Nonlinear dynamic response in the middle compaction stage. (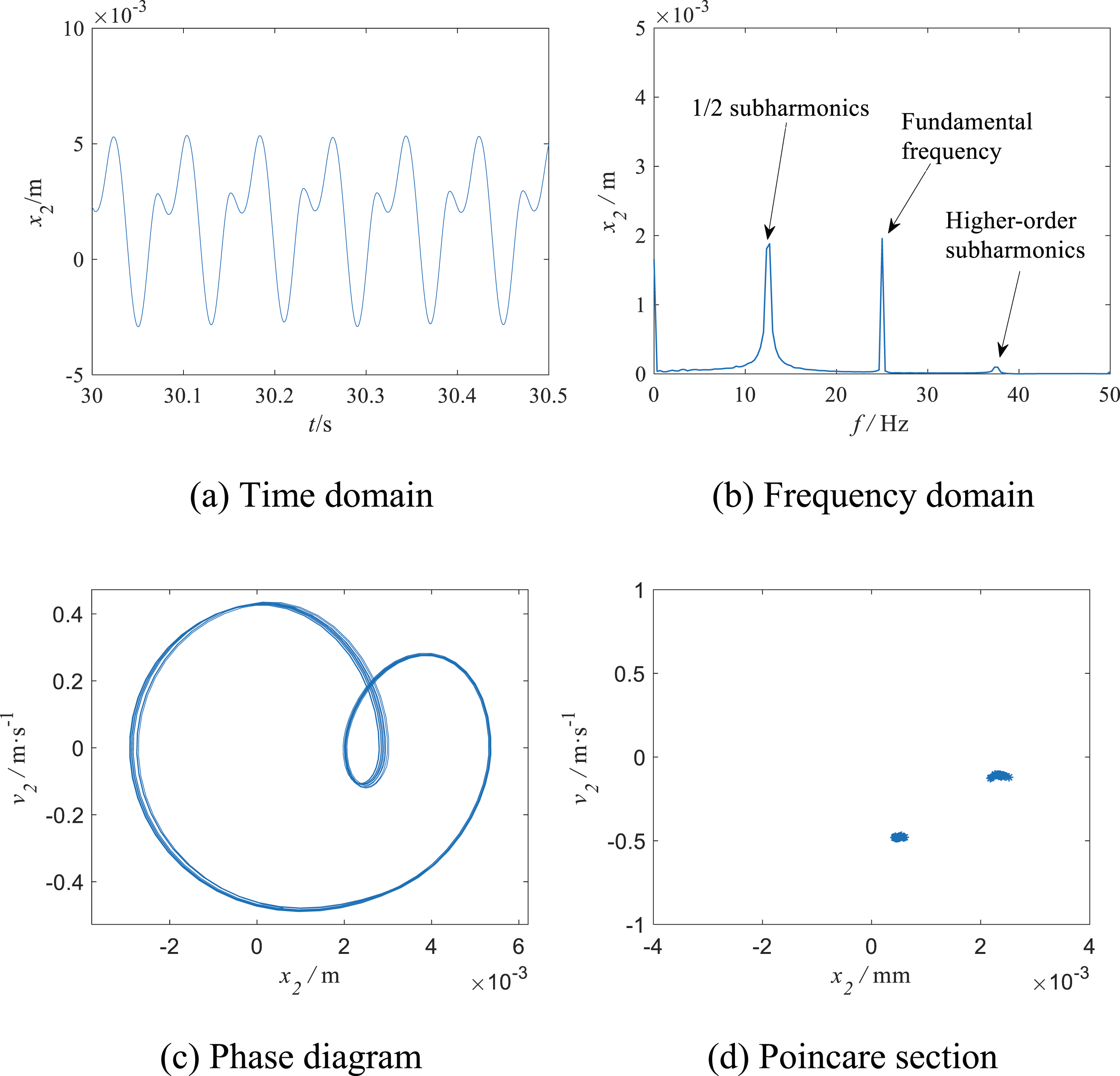
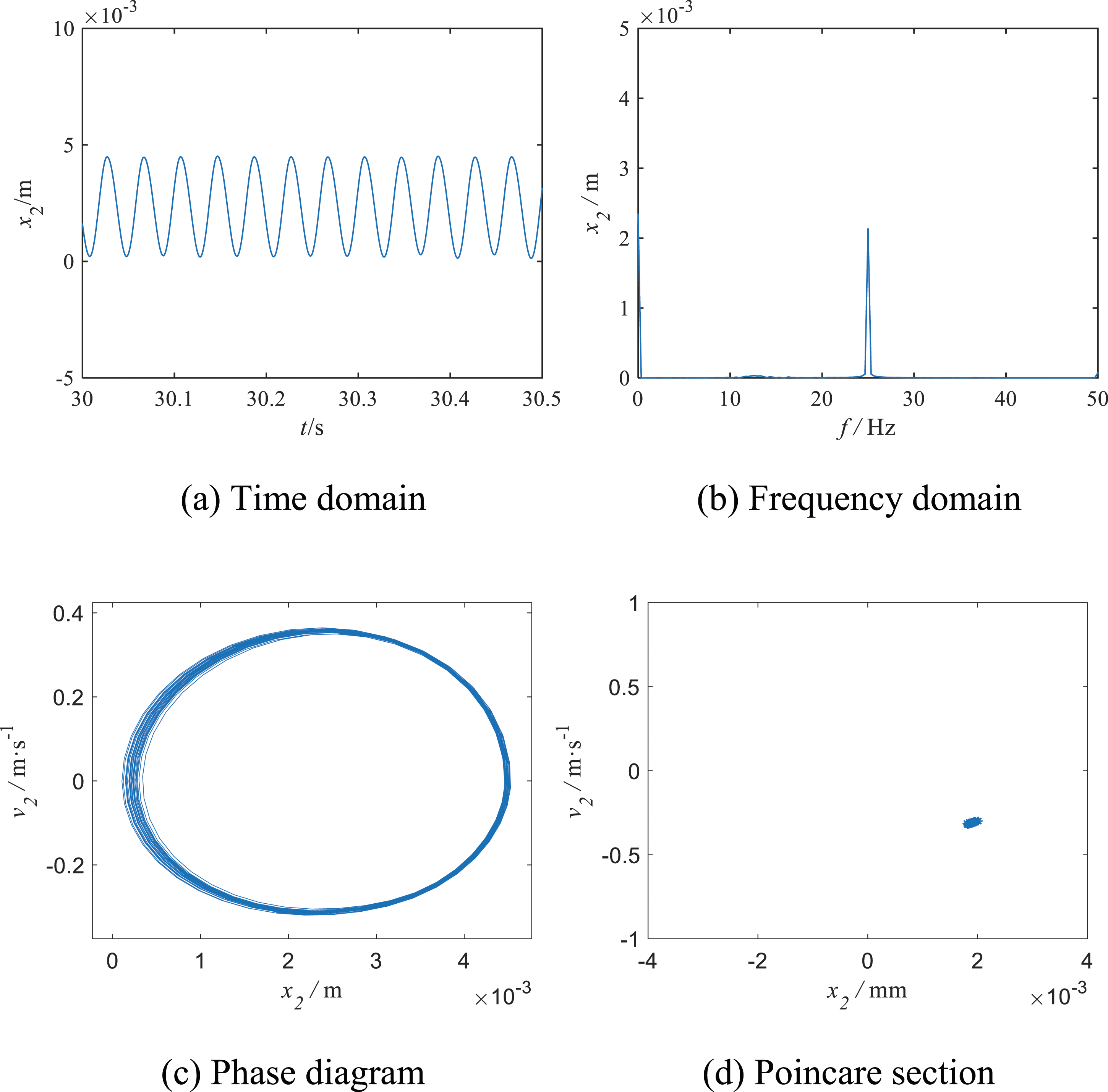
Based on the analysis of Figures 10 and 14, it can be concluded that when the excitation frequency
Analyzing Figures 12 and 14 (Figures 13 and 14), it can be observed that when the excitation frequency increases to
Based on Figures 11(a) and (b), it can be observed that when the frequency Nonlinear dynamic response in the middle compaction stage. ( Nonlinear dynamic response in the middle compaction stage. (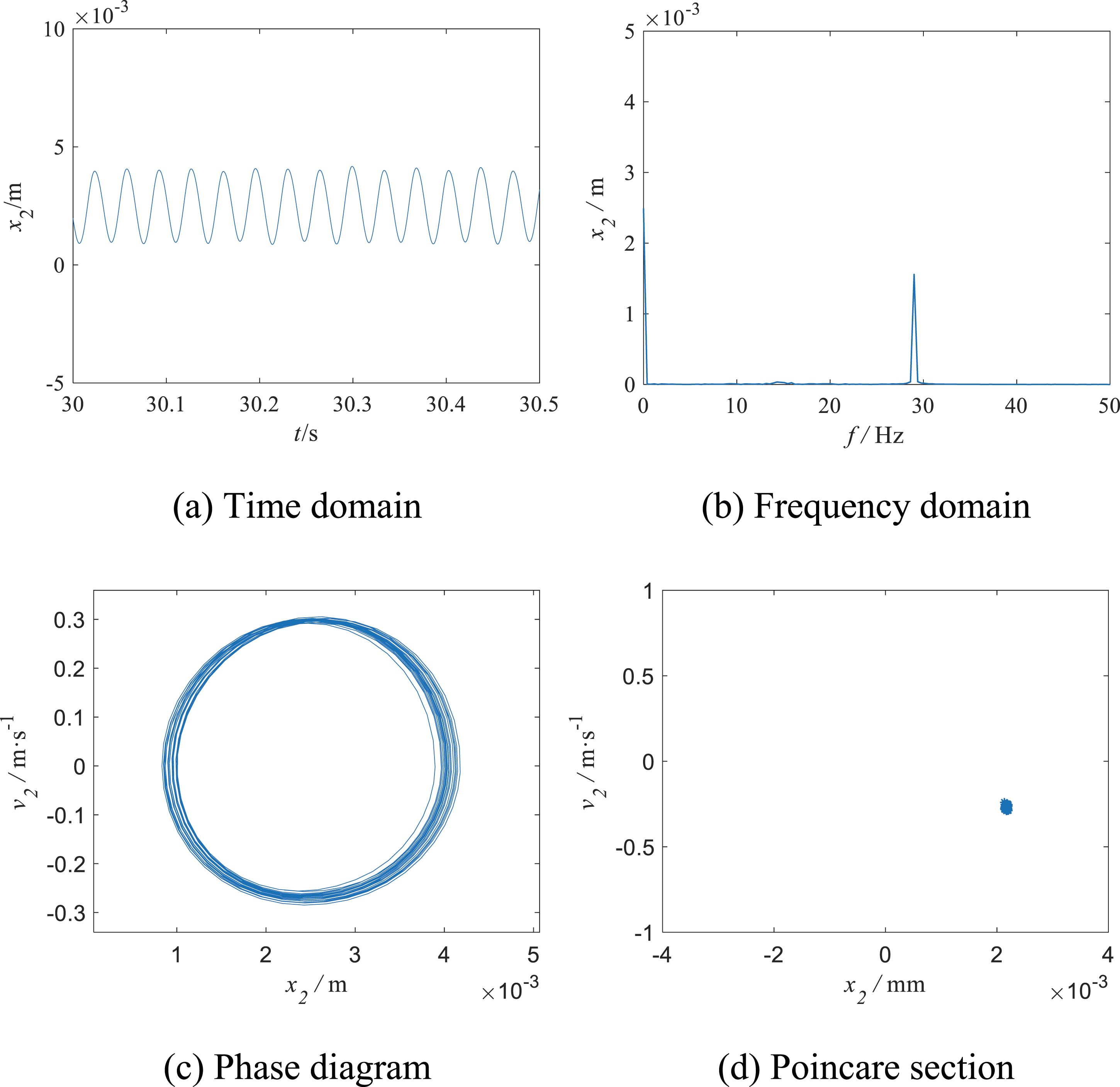
Upon analyzing Figures 14 and 15 (Figures 14 and 16), it can be observed that as the excitation frequency increases from
By comparing the dynamic responses of the vibrating wheel in a stable motion state during the initial and middlecompaction conditions (Figures 10, 15, and 16), it is concluded that to ensure the compaction quality of the subgrade, the roller should operate within the range of a single-period motion state. This can be achieved by increasing the frequency or decreasing the excitation force, transitioning from the initial “low frequency, high amplitude” state to a “high frequency, low amplitude” state, which aligns with the requirements of practical compaction operations. 32
Conclusions
(1) A nonlinear model of the “frame-vibrating roller-soil” system was established based on the nonlinear characteristics of the frame’s vibration isolator variable stiffness spring and the compacted soil, which better reflected the nonlinear elastic-plastic deformation characteristics of the soil in the early and middle stages. The accuracy of the analytical solution of the established nonlinear dynamic equation was verified through numerical solutions, and the nonlinear vibration response diagram of the vibrating roller was obtained through simulation, providing theoretical guidance for analyzing the dynamic characteristics of the vibrating roller in actual vibration compaction processes. (2) In the early stage of compaction, the dynamic response of the vibrating roller transitions from the “multi-period” to the “single-period” motion state with the increase of excitation frequency or the decrease of excitation force; in the middle stage, the motion of the vibrating roller undergoes three states: “chaotic,” “multi-period,” and “single-period.” Therefore, changing the compaction working parameters under different compaction conditions will lead to different changes in the vibrating roller’s response. (3) By keeping the excitation frequency or excitation force constant, the response of the vibrating wheel becomes more unstable during the transition from the initial to the middle compaction phase. To ensure the compaction quality of the subgrade and the comfort of the operator, it is necessary to continuously increase the excitation frequency or decrease the excitation force as the compaction process progresses. These research results provide a theoretical basis for the parameters selection of intelligent compaction control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No. 12072204), Natural Science Foundation of Hebei Province (Grant No. A2020210039).