
Abstract
A nonlinear dynamic model of angular contact ball bearing under combined external loads is established based on the nonlinear elastic Hertz contact theory and raceless control theory. The established dynamic model is solved by employing variable step size Newton Raphson iteration method and the validation of model is verified by comparing the proposed results with the corresponding results come from the existing literatures. The solution of the presented model has high accuracy compared with the existing experimental results. In addition, the computational efficiency of the proposed model is improved significantly by introducing iteration step size adjustment factor. According to the proposed model, the dynamic contact and stiffness characteristics of angular contact ball are studied systematically by investigating the effects of combined external load working conditions on the contact parameters including contact angle and contact force and the stiffness parameters including diagonal stiffness and off-diagonal stiffness. This research can provide the theoretical basis and technique guidance for the designation and manufacture of angular contact ball bearing under combined external loads.
Keywords
Introduction
As the typical representative of ball bearing, angular contact ball bearing is applied to rotating machinery fields universally due to it have high-speed ratio and withstand combined load working conditions. In addition, it can meet the requirements of high reliability and low power of rotating machinery in some degree. As the crucial component of rotating machinery, the dynamic behaviors including dynamic contact and stiffness characteristics of angular contact ball bearing have influence on the stability and reliability of rotating machinery. Therefore, the dynamic behaviors of angular contact ball bearing have been investigated systematically from different perspectives in the past several decades. With the unremitting efforts of many scholars, a series of remarkable results have been achieved.
When talking above the establishment of dynamic model of angular contact ball bearing, it has to be mentioned the works done by Jones, Harris and Gupta.1–5 Among the proposed dynamic model of angular contact ball bearing, the quasi-static dynamic model of angular contact ball bearing is representative and it is presented by Jones based on raceway control hypothesis and Hertz contact theory. De Mul et al.6,7 presented a general five degree of freedom dynamic model for calculating the load distribution and deflection of rolling element bearings based on the Jones model. However, the internal friction between ball and raceway is neglected. Cao et al. 8 established a general model with regard to angular contact ball bearing on the basis of Jone’s model and raceway control hypothesis, the centrifugal force and gyroscopic moment are taken into account. The raceway control hypothesis contains inner raceway control and outer raceway control. Wang et al.9,10 analyzed the contact characteristics and spin-to-roll ratios of angular contact ball bearing subjected to external combined loads by discarding the traditional raceway control hypothesis. Cheng et al. 11 investigated the influences of structural and material parameters on the vibration characteristics of bearing-rotor system based on quasi-static model of bearings. Zhou et al.12,13 established a five degrees of freedom quasi-static dynamic model of angular contact ball bearing for determining the raceway tolerance of high-precision rolling bearing and the waviness conducted by manufacture error is considered. Gao et al. 14 proposed an analytical calculation model of high-speed ball bearing based on the Jones raceway control hypothesis model. The clearance, centrifugal displacement and thermal deformation are taken into account.
Many researchers focused on the dynamic performances including contact characteristics, load distributions and bearing stiffness characteristics of angular contact ball bearing. Zhang et al.15–18 deduced the expressions of bearing stiffness matrix of angular contact ball bearing under preload by using iterative algorithm, meanwhile, studied the influences of external load condition and rotating on the bearing stiffness. Chu et al.19,20 established a comprehensive dynamic model of angular contact ball bearing based on the extended Jones-Harris model for analyzing the load distribution and stiffness of angular contact ball bearing. The effects of external force, numbers of ball and bearing waviness on bearing stiffness are taken into account. Zhuo et al. 21 established a three degrees of freedom dynamic model of double-row self-aligning ball bearings system by using fourth-order Runge–Kutta method based on Hertzian elastic contact theory and deformation compatibility theory. Zhao et al. 22 studied the load characteristics and coefficient of friction of angular contact ball bearing at high-speed working condition. Shi et al. 23 proposed a combined numerical algorithm for analyzing the quasi-dynamics and thermal elastohydrodynamic lubrication characteristics of angular contact ball bearing at heavy-load and high-speed working conditions. Li et al. 24 established a mechanical model of angular contact ball bearing with localized defect and the influences of some parameters on the contact angles and load distributions are analyzed systematically. Deng et al. 25 investigated the effects of raceway diameters and guiding clearances on the bearing stiffness by integrating the stiffness matrix to the dynamic model of ball bearing. Luo et al. 26 established a mathematical model for analyzing the static and dynamic stiffness of angular contact ball bearing based on ball-raceway Hertz point contact theory by employing Newton–Raphson algorithm method. Xu et al. 27 proposed a general analytical stiffness model of ball bearings in rotor system for analyzing the influence the radial force, bearing clearance and fit clearance on the contact and stiffness characteristics of ball bearing. Fang et al. 28 analyzed the nonlinear stiffness of double-row angular contact ball bearing considering three different configurations on the basis of the improved quasi-static model.
In addition, the solution methods of the nonlinear dynamic model of angular contact ball bearing have gained many experts attention. Wang et al.29,30 set up an improved nonlinear dynamic model of angular contact ball bearing, the factors including preload condition, lubrication, waviness and Hertz contact are considered. Xi et al. 31 proposed a novel contact probability model of angular ball bearing subjected to axial and radial loads by employing multi-body dynamics and a spherical grid division approach. Liu et al.32,33 developed a novelty analytical method for analyzing the variations of contact angle, load distribution and stiffness under the combined loads. Meanwhile, it is worth noting that the calculation time and computational resource of the established dynamic model are less than the traditional quasi-static model. Liao et al.34–36 deduced the three-dimensional expressions of elastic deformation at different position angle by using Newton method for analyzing the deformation and load of ball bearing according to the geometry shape of inner and outer raceway. Wang et al. 37 proposed a general model for investigating the skidding between ball and raceways of angular contact ball bearing at high-speed by employing fourth-order Runge-Kutta algorithm. Kang et al. 38 determined the bearing stiffness of angular contact ball bearing based on the geometry features angular contact ball bearing by employing back-propagation neural network method. Wang et al. 39 proposed a nonlinear dynamic model of ball bearing considering bearing deformation and ball-inner raceway separation and the predict method of the initial iterative value is selected to calculate the dynamic properties of ball bearing. Wang et al. 40 presented a comprehensive model of ball bearing subjected to different preload mechanisms for studying the effects of initial interference value, shaft rotation speed and angular ring misalignment on the dynamic performances of bearing by utilizing the finite difference method.
According to the above introduction, it is not hard to see that the dynamic models of angular contact ball bearing have been investigated deeply from different perspectives by using iterative methods. However, the existing investigations have some deficiencies and they can be summarized as follow: The existing iterative solving methods need consume a calculation time and computational resources, the stability of iterative solving results are largely depend on the selection of initial value of iteration and the iterative solving results are prone to divergence when the external load working conditions are changed; The investigations of bearing stiffness focused on diagonal stiffness and neglected the influences of off-diagonal stiffness on the dynamic characteristics of angular contact ball bearing at high speed in the existing literatures. In order to compensate the mentioned deficiencies, this paper intend to establish a general five degrees of freedom dynamic model of angular contact ball bearing based on nonlinear elastic Hertz contact theory and raceless control theory which can avoid the judgment of inner and outer raceway control theory effectively. The established dynamic model is solved by employing variable step size Newton–Raphson method which is realized by introducing the iteration step size adjustment factors. The variable step size Newton–Raphson method can enhance the stability, accuracy and calculation efficiency of iterative solution of angular contact ball bearing under combined loads working conditions. Then, according to the established dynamic model, the effects of combined external loads on the dynamic contact angle and contact force of angular contact ball bearing under combined external loads investigated systematically. Finally, the influences of combined external loads on the diagonal stiffness and off-diagonal stiffness of angular contact ball bearing under combined external loads are analyzed thoroughly. The above investigations with regard to dynamic contact and stiffness characteristics can provide reference for the vibration characteristic analysis of angular contact ball bearing and the establishment of rotor-bearing system.
Theoretical formulations
The model description of angular contact ball bearing
In order to establish a general five degrees of freedom dynamic model of angular contact ball bearing advantageously, the geometric model of angular contact ball bearing is described in Figure 1. As one can see from Figure 1, the Cartesian coordinate is selected as global coordinate system, the five degrees of freedom of angular contact ball bearing including three translation displacements x, y and z and two rotate displacements θ
y
and θ
z
. In practical engineering application, the angular contact ball bearing consists of inner raceway, outer raceway, rolling element (ball) and cage, the outer raceway and bearing house are connected by using interference fit and the inner raceway and rotor are connected by applying interference fit. According to the above interference fits, the outer raceway is assumed as static, the inner raceway is assumed as rotating with rotor and it rotates x axis and the rotating speed is described by using ω
i
in this paper. The geometric model of angular contact ball bearing.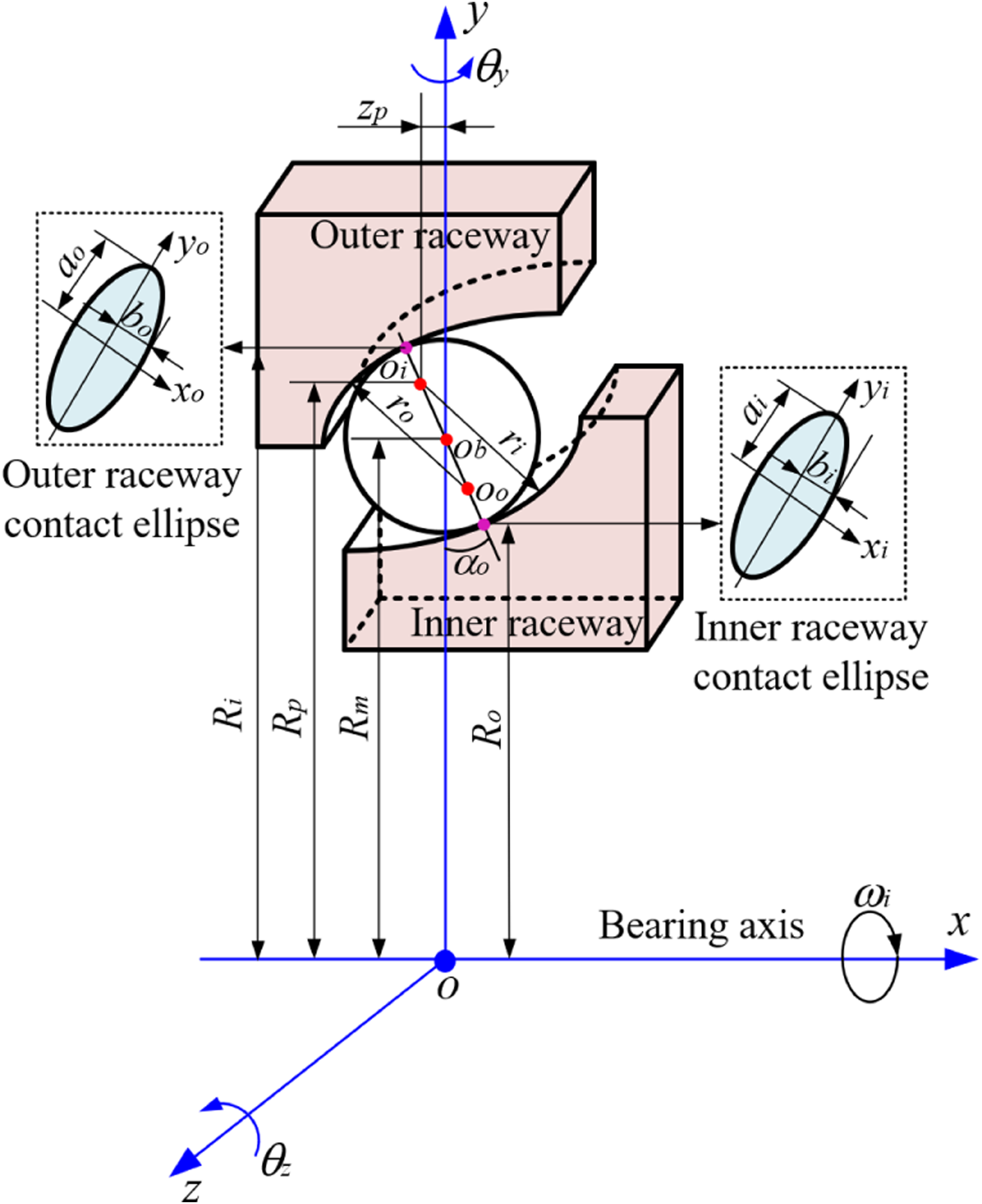
Where o
i
, o
o
and o
b
denote inner raceway curvature center, outer raceway curvature center and ball center respectively, the above three centers are collinear when the rotating speed of angular contact ball bearing is 0; r
i
and r
o
represent inner raceway curvature radius and outer raceway curvature radius respectively; R
p
and z
p
express the radial distance and axial distance between inner outer raceway curvature center and inner ring center o of angular contact ball bearing; R
m
, R
i
, and R
o
denote pitch radius, inner raceway, and outer raceway contact radius respectively. The inner raceway contact ellipse and outer raceway contact ellipse are caused by the contact between ball and the inner and outer raceway, a
i
and a
o
denote the major axis radius of inner raceway and outer raceway contact ellipses, b
i
and b
o
represent the minor axis radius of inner raceway and outer raceway contact ellipses. α
o
represents the free contact angle of angular contact ball bearing and it can be determined by the following expression.


The geometric analysis of angular contact ball bearing
According to the above model introduction of angular contact ball bearing, the relation position relationships of three centers including inner raceway curvature center, outer raceway curvature center and ball center have been determined when angular contact ball bearing is at rest. However, the relation position relationships of three centers change with the rotating speed of angular contact ball bearing increased. Due to the outer raceway is assumed as static in this paper, the location of outer raceway curvature center keeps constant with rotating speed increased. The location of inner raceway curvature center and ball center vary with rotating speed increased and the variations of location relationship of inner raceway curvature center and ball center are shown in Figure 2. The relative position relationship of angular contact ball bearing internal structure.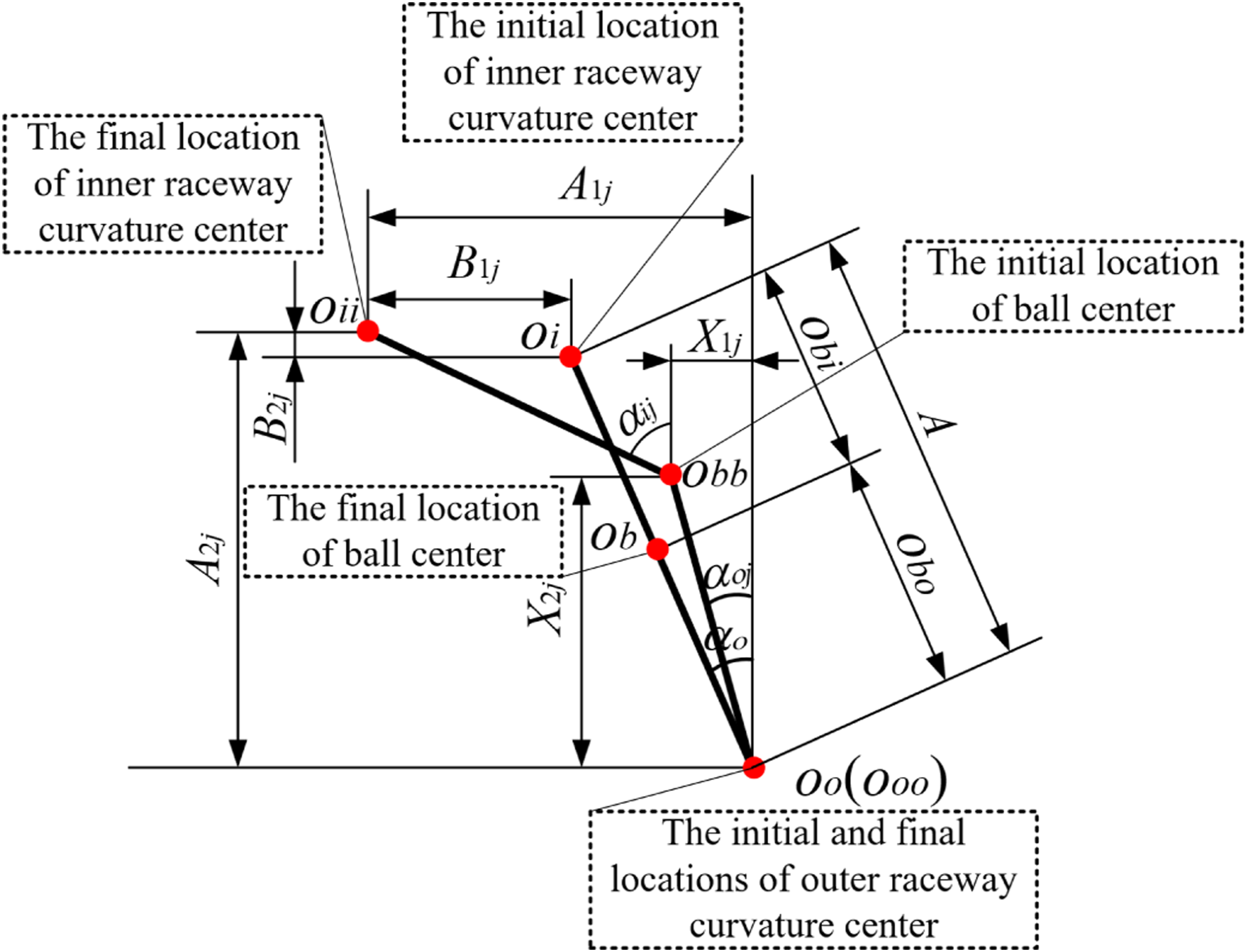
Where O
ii
, O
oo
and O
bb
denote the final location of inner raceway curvature center, outer raceway curvature center, and ball center; A1j and A2j express the axial and radial distances between the final location of inner raceway curvature center and the final location of outer raceway curvature center; B1j and B2j denote the axial and radial distances between the final location of inner raceway curvature center and the initial location of inner raceway curvature center; O
bi
and O
bo
represent the distance between the final location of ball center and the location locations of inner and outer raceway curvature center; α
ij
and α
oj
denote the contact angle of inner raceway and outer raceway; X1j and X2j are variables which express the axial and radial distances between the final location of ball center and the final location of outer raceway curvature center. The expressions of the above symbols can be written as follow:


According to the existing literature
17
, the specific expressions of A1j, A2j, B1j and B2j can be written as follow:


The symbol of φ
j
denotes ball azimuth angle of angular contact ball bearing and it depends on the number of ball and the angular velocity of cage. The expression of φ
j
can be written as follow: The ball distribution diagram of angular contact ball bearing.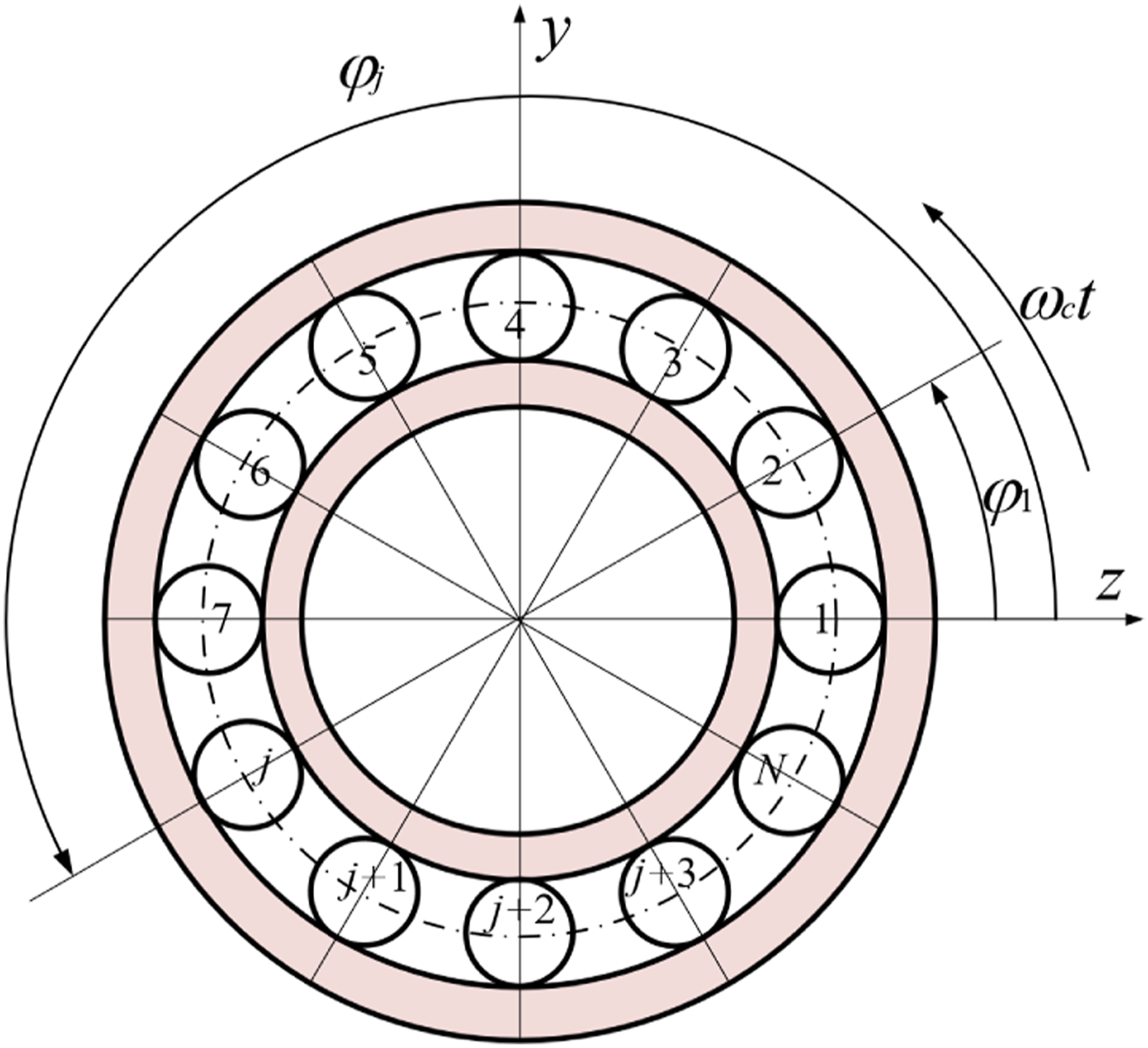

The inner and outer raceway contact angles α
i
and α
o
can be ascertained by analyzing the geometric relationship of internal structure of angular contact ball bearing and the corresponding expression can be written as follow:

According to the law of sines and cosines, a set of equilibrium equations with regard to the geometric relative position of internal structure of angular contact ball bearing can be determined as follow:


The force analysis of angular contact ball bearing
In order to get a set of equilibrium equations with regard to ball, the jth ball is selected as object and the force analysis of ball is described in Figure 4. The jth ball of force analysis.
Where Q
ij
and Q
oj
denote the contact forces resulting from the contact between ball and the inner and outer raceway respectively; T
ij
and T
oj
represent the friction forces caused by the rolling friction between ball and the inner and outer raceway; F
cj
and M
gj
express the centrifugal force and gyroscopic moment. After force balance analysis, a set of equilibrium equations with regard to ball can be determined as the following form.

According to nonlinear elastic Hertz contact theory, the contact forces Q
ij
and Q
oj
can be written as follow:


According to the published literature,
17
the expressions of F
cj
and M
gj
are described as follow:




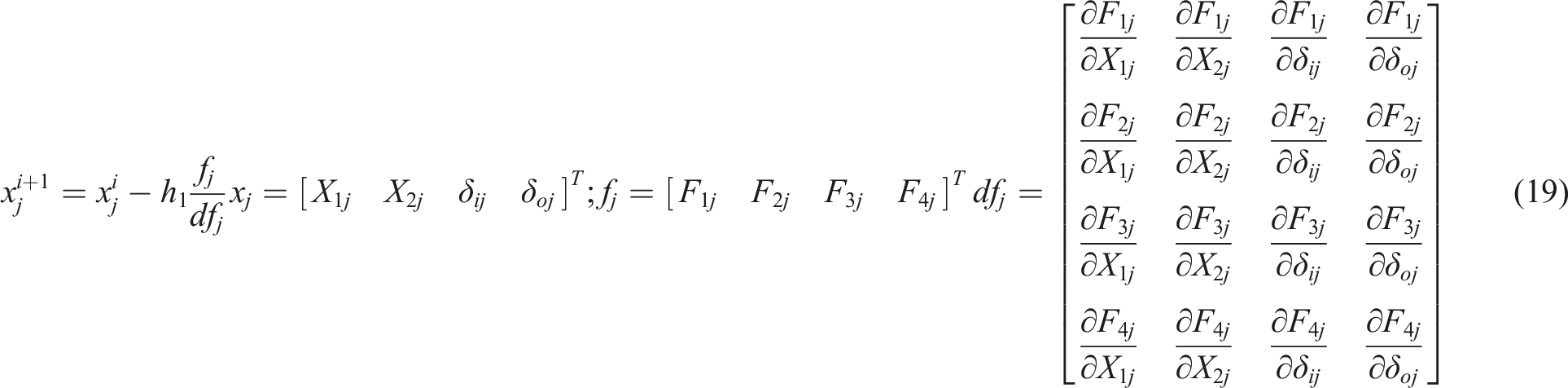
Due to the above two sets equilibrium equations have strong nonlinearity and it cannot be solved by employing the conventional numerical method. Thus, this paper intends to solve four variables X1j, X2j, δ
ij
and δ
oj
by using variable step size Newton Raphson iterative method.
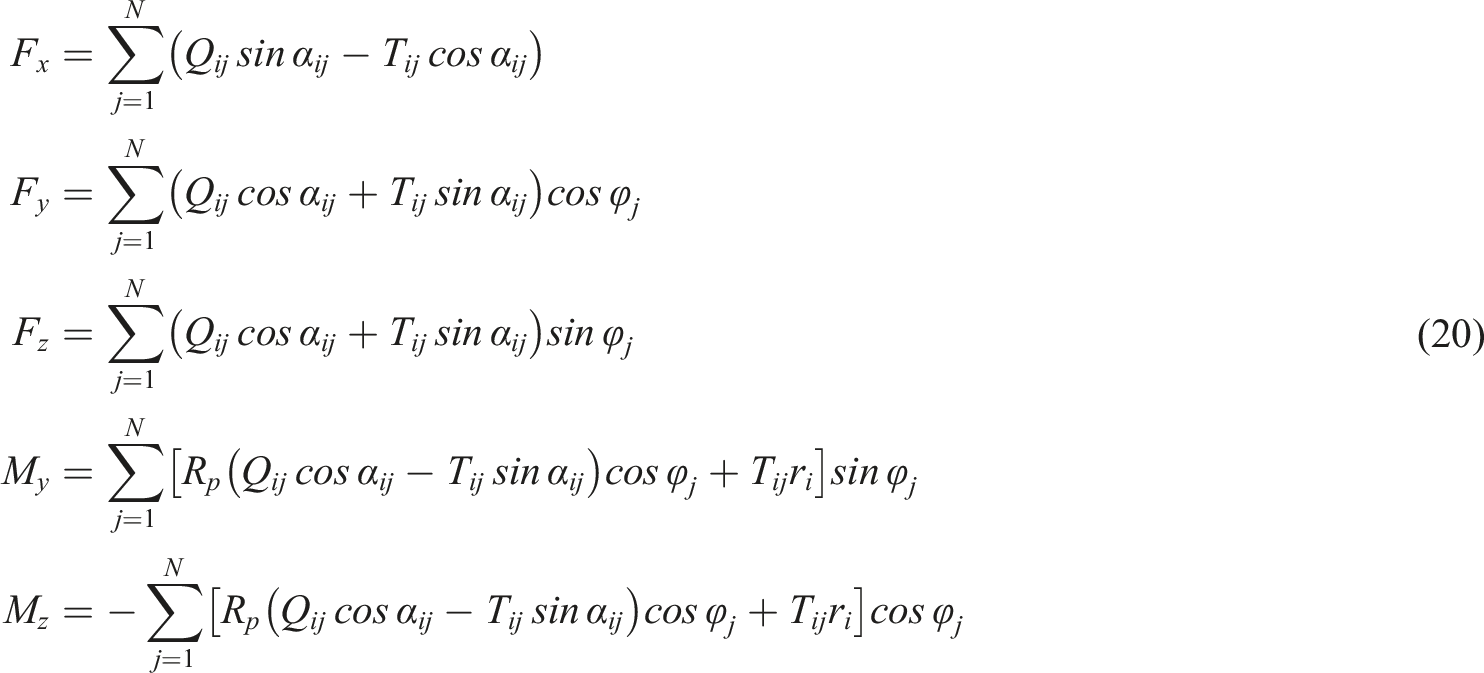
In order to solve the global displacement δ
x
, δ
y
, δ
z
, θ
y
and θ
z
of inner ring of angular contact bearing under external loads, the force analysis of angular contact ball bearing inner ring are carried out in the following discussion and the corresponding force analysis results can be found in Figure 5. According to the above force analysis, a set of equilibrium equations with regard to angular contact ball bearing inner ring can be written as the following form. The schematic diagram of flexible shaft segment.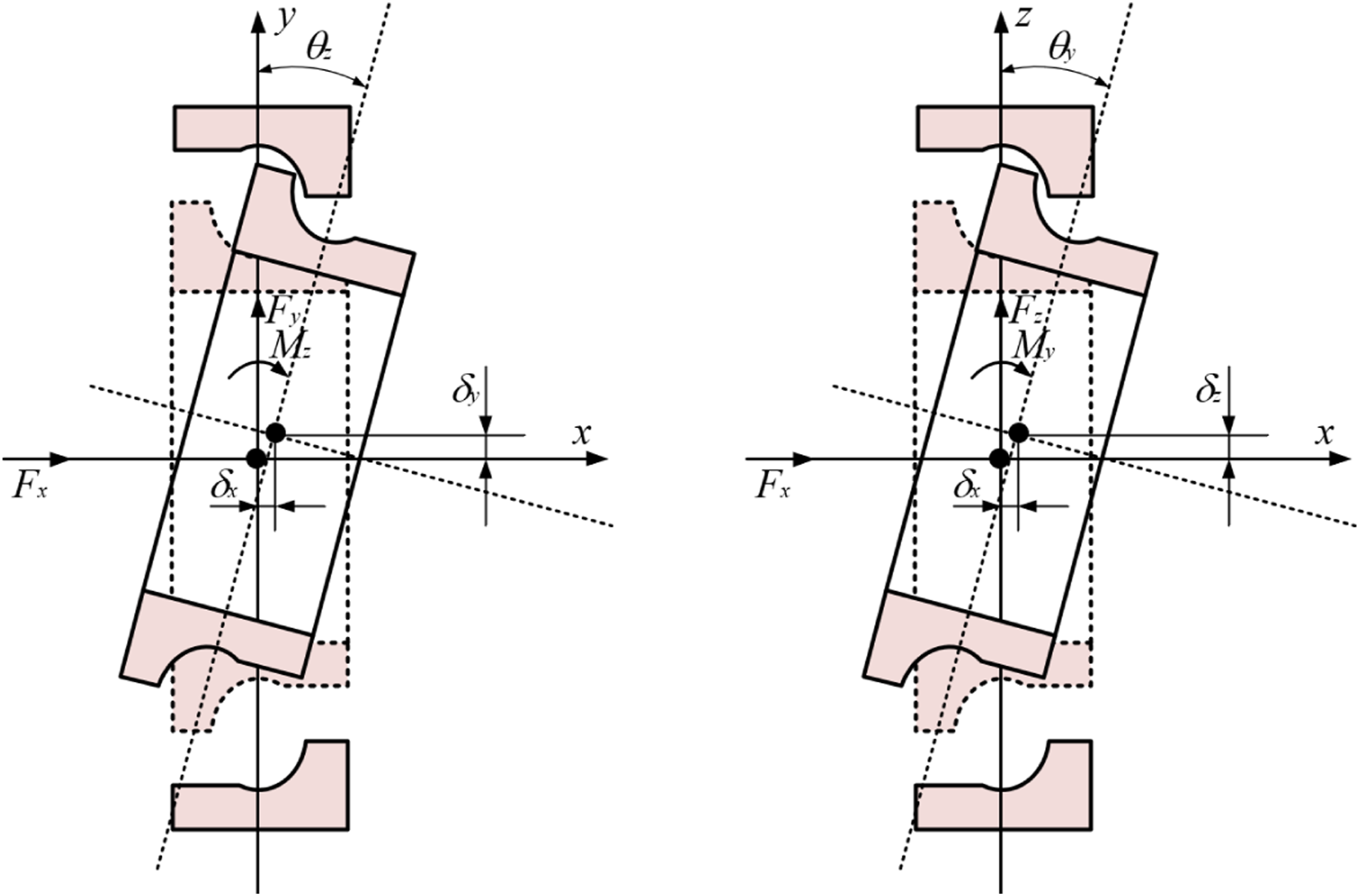
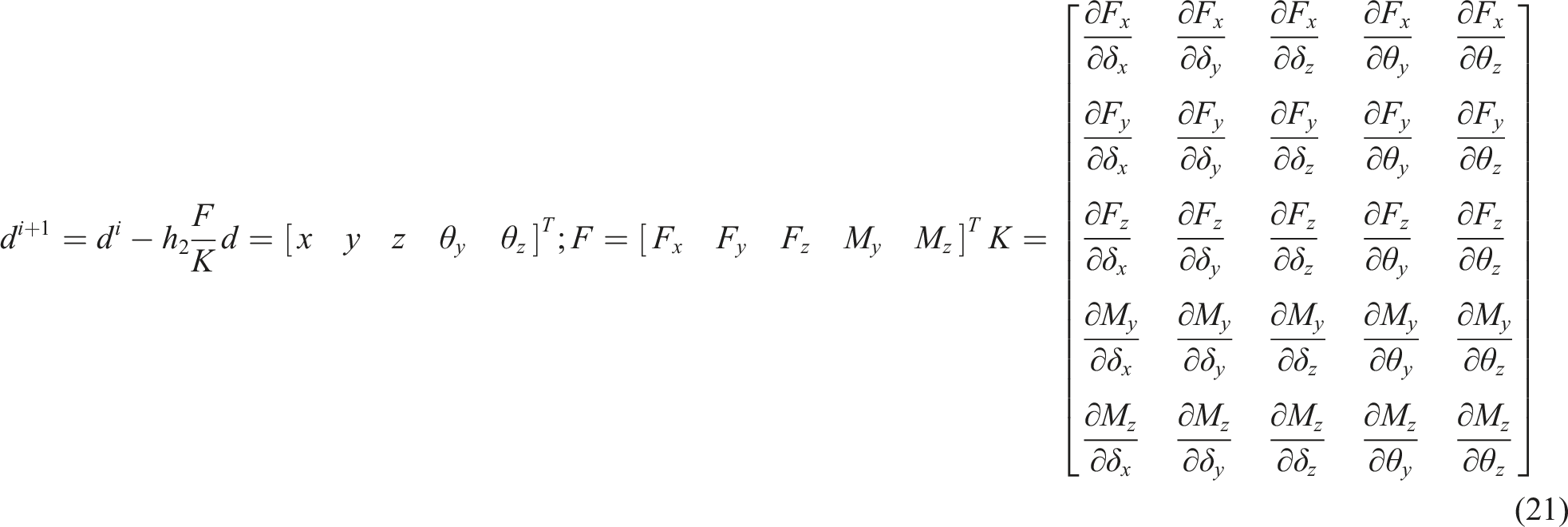
The solution of angular contact ball bearing
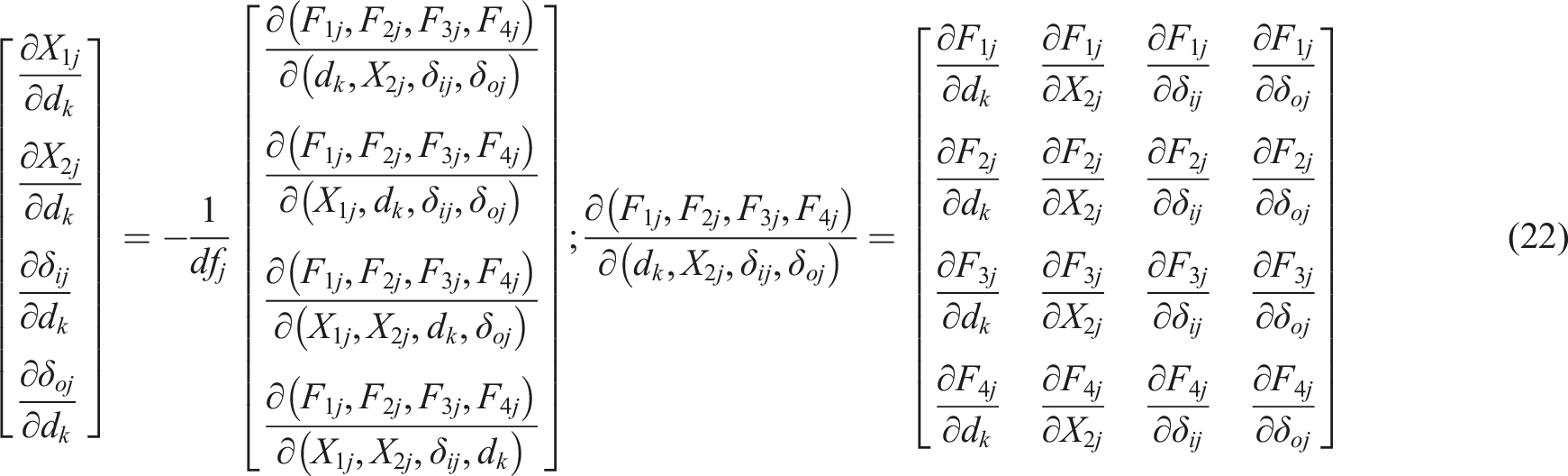
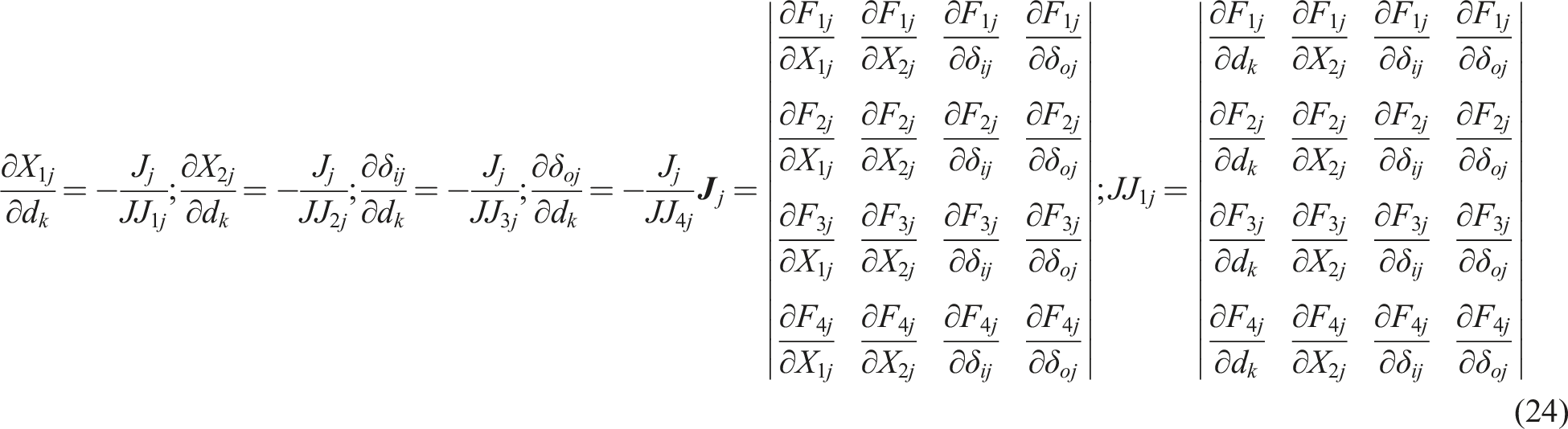
After the above discussion, the 4N + 5 nonlinear equilibrium equations have been determined. In the process of model solution, the implicit relationship between the local variables X1j, X2j, δ ij and δ oj and the global variables δ x , δ y , δ z , θ y and θ z need to be deduced furtherly in the following discussion. According to the existing literature, 17 this paper intends to employ two different calculation forms to deduce the above implicit relationship.
The implicit relationship is expressed by using first form:
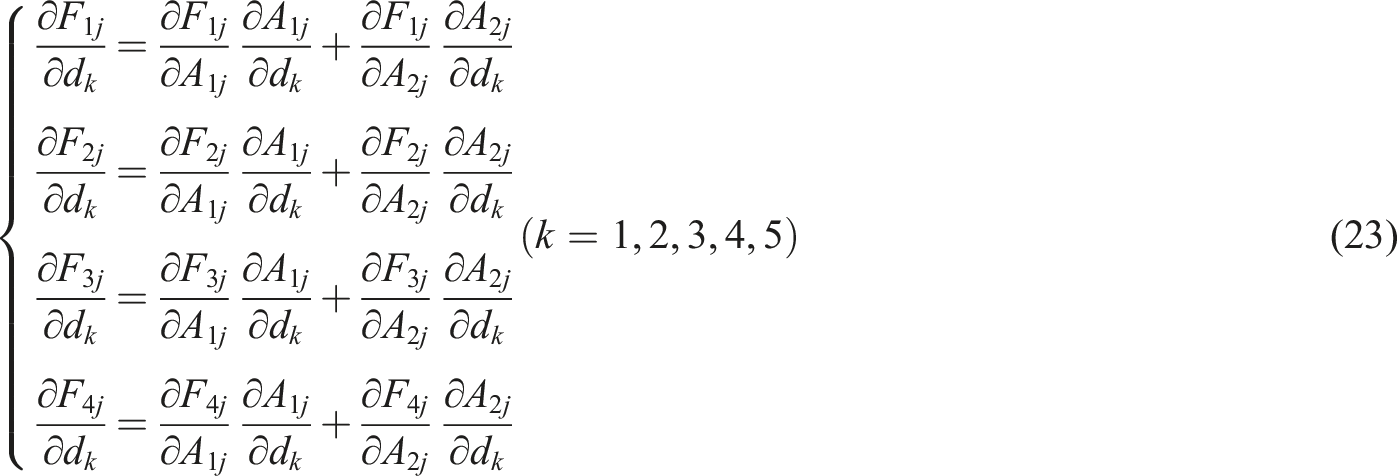
The implicit relationship is expressed by using second form:
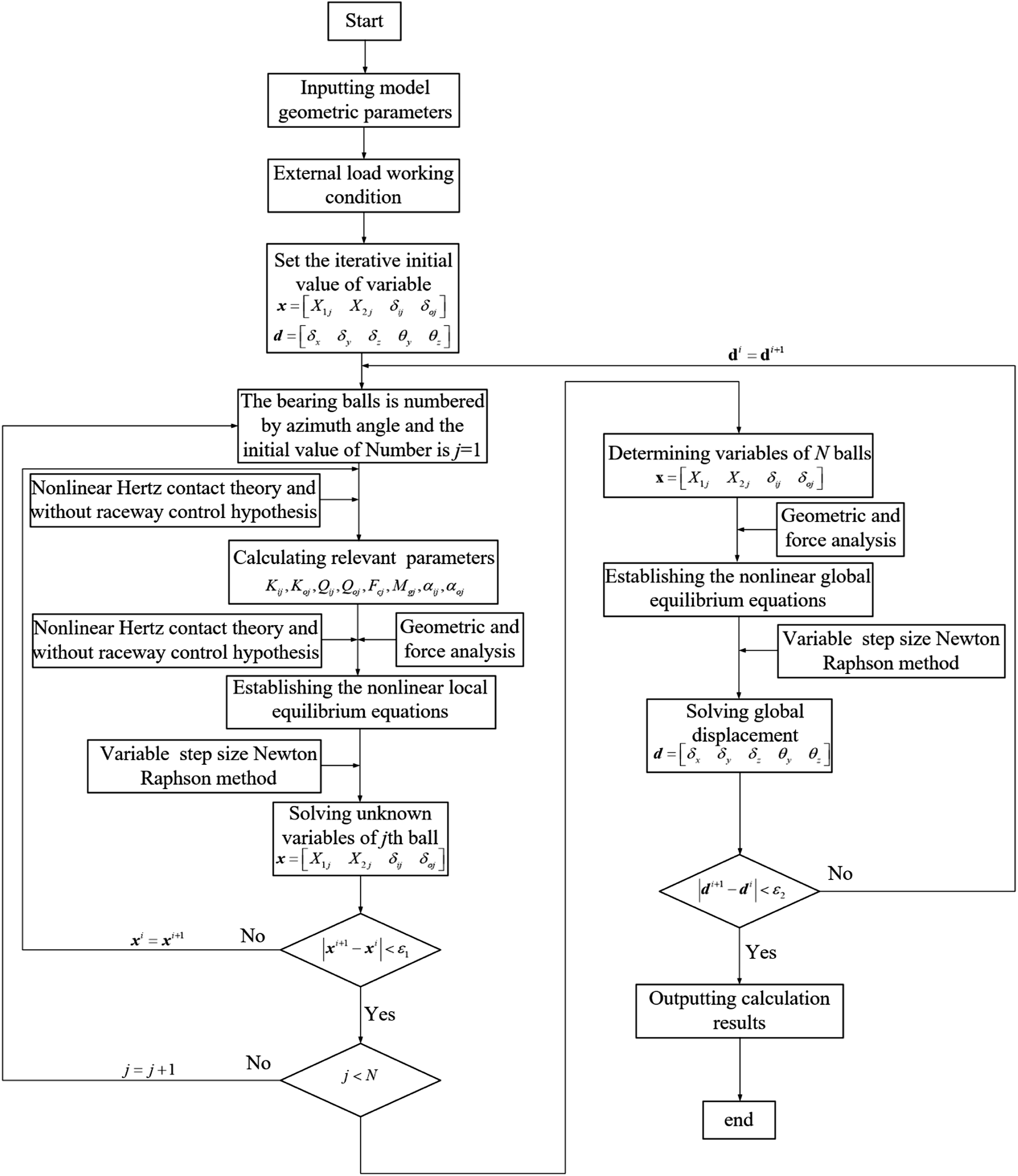
Due to the proposed dynamic model with regard to angular contact ball bearing involves many variables, the flow chart of variable transmission is shown as Figure 6 for the subsequent programming conveniently. Meanwhile, the flow chart of model solution is given in Figure 7 for describing the solution process of dynamic characteristics of angular contact ball bearing under combined external loads by using variable step size Newton Raphson iteration method. According to the above proposed dynamic model with angular contact ball bearing, the dynamic contact and stiffness characteristics can be solved. The flow chart of variable transmission of angular contact ball bearing. The flow chart of model solution of angular contact ball bearing.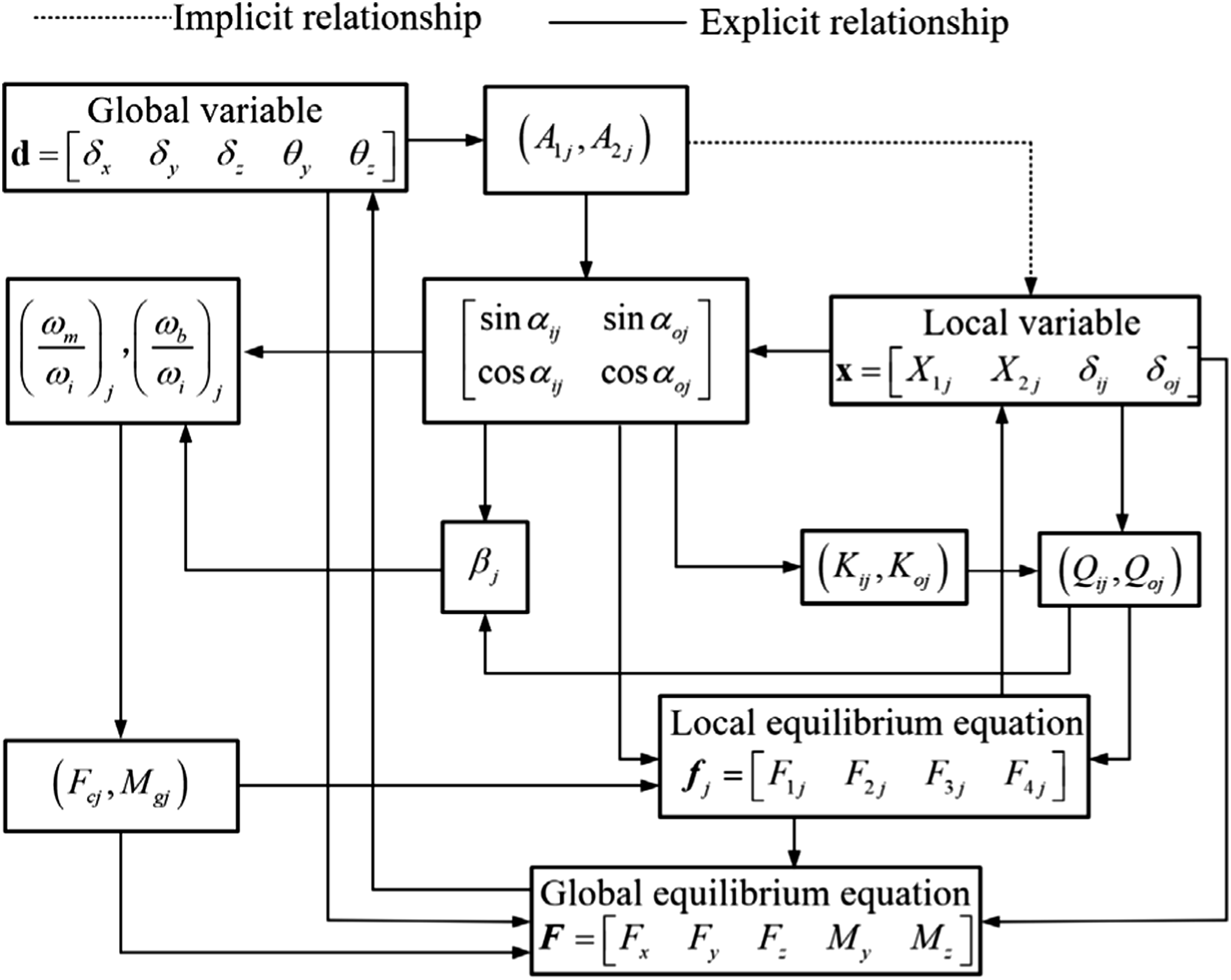
Results and discussions
After the above theoretical analysis, the dynamic model of angular contact ball bearing is established by employing variable step size Newton Rapson method. In order to demonstrate the proposed model can be used to solve the dynamic contact and stiffness characteristics of angular contact ball bearing subjected to combined external loads, the model validation is carried out firstly; Secondly, the influences of combined external load working conditions on the dynamic contact angle and contact force are investigated systematically; Finally, the effects of combined external load working conditions on the dynamic stiffness including diagonal and off-diagonal stiffness are analyzed thoroughly.
Model validation
The model validation of angular contact ball bearing is realized by comparing the calculation results of the proposed model with the corresponding results come from the existing literatures. The model validation can be divided into three parts in the following discussion.
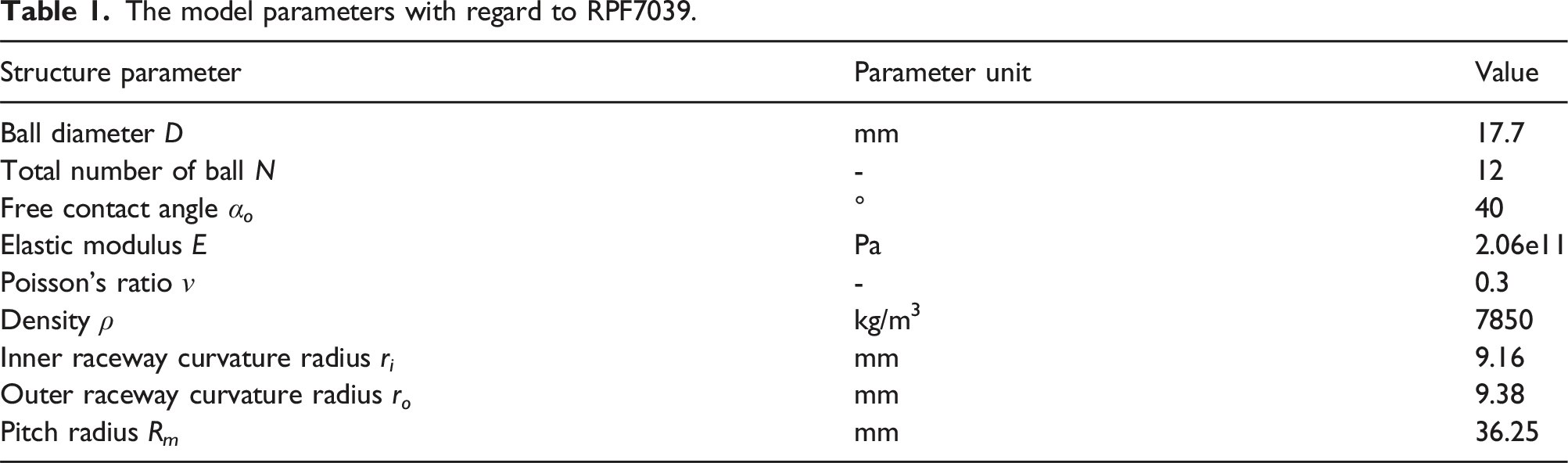
The model parameters with regard to RPF7039.
Comparison results with regard to static stiffness of angular contact ball bearing under combined external loads.
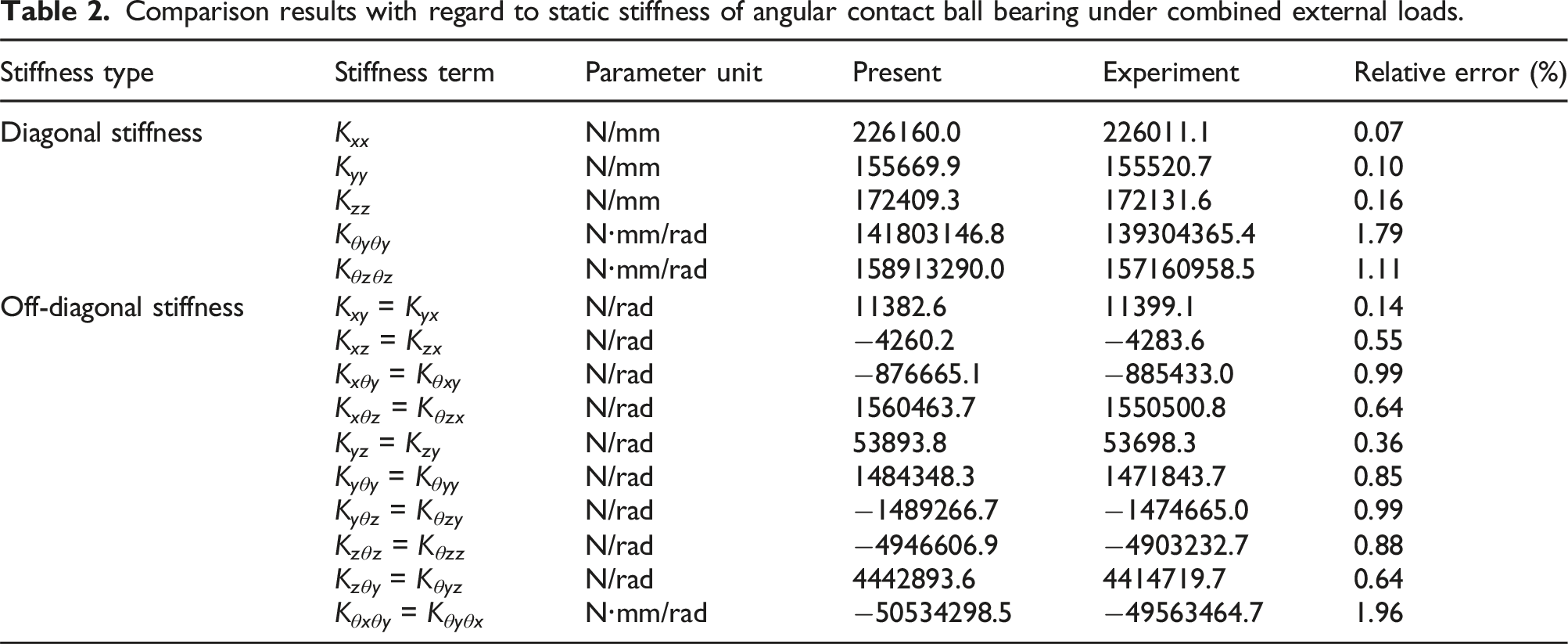
As shown in Table 2, the comparison results of static stiffness contain diagonal and off-diagonal stiffness. According to the relative error between the results calculated by the proposed model and the corresponding experiment results come from the existing literature (The maximum relative error is less than 2%, the calculation formulation is shown in equation (25)), it is not hard to find that the calculation results of presented model have good agreement with the corresponding experiment results. Meanwhile, it is necessary to point out that the iteration step size adjustment factor is selected as h1 = h2 = 0.1 in the process of model comparison. The value of iteration step size adjustment factor is determined by debugging the established dynamic model of angular contact ball bearing. After the iteration step size adjustment factor is introduced, the convergence and computational efficiency of the established dynamic model are improved significantly. The time of model solution is controlled within 2s and the computational efficiency of model is improved by 10 times compared with the Newton Rapson method without introducing the iterative step size adjustment factor. In addition, the model iteration solution precision is assumed as ε1 = ε2 = 10−9 mm and the maximum number related to iteration is selected as i10000 for predicting the occurrence of non-convergence of iteration.
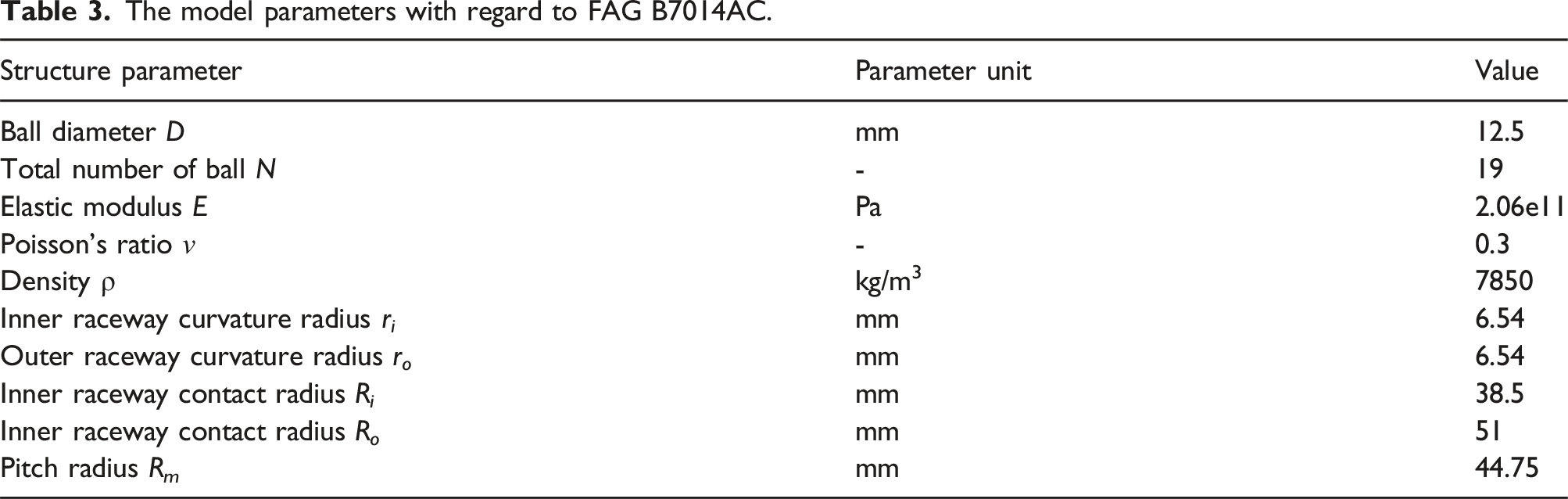
The model parameters with regard to FAG B7014AC.
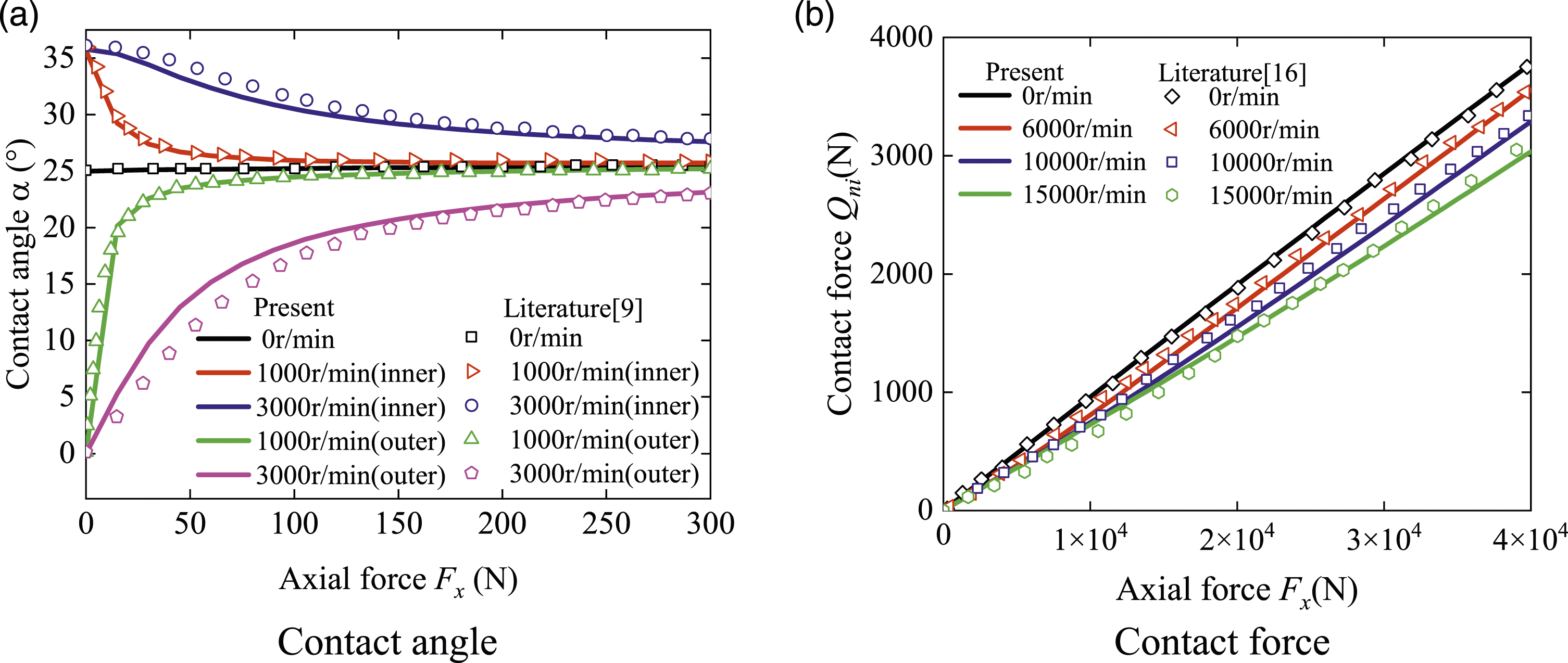
The comparison results with regard to contact parameters of angular contact ball bearing. (a) Contact angle and (b) Contact force.
The model parameters with regard to B218.
As shown in Figure 8(a), it describes that the variation tendency of inner and outer raceway contact angles of under purely axial load with axial force F x and rotating speed increased. The inner raceway contact angle increases under certain axial force F x with rotating speed increased and decreases under certain rotating speed with axial force F x increased. The outer raceway contact angle decreases under certain axial force F x with rotating speed increased and increases under certain rotating speed with axial force F x increased. It is evident that the calculation results of contact angle of the presented model have good consistent with the corresponding results come from the published literature. As shown in Figure 8(b), it can be seen that the inner raceway contact force increases with axial force F x increased and decreases with rotating speed increased. Meanwhile, it also can be seen that the comparison results with regard to inner raceway contact force demonstrate the calculation results from the presented model have good consistent with the published literature.
Finally, the calculation results with regard to dynamic stiffness including axial stiffness and radial stiffness of the proposed model is compared with the corresponding results come from the existing literatures. The comparison results with regard to dynamic stiffness of ball bearing under purely axial load and different radial clearances are shown in Figure 9. The model parameters of ball bearing which is used for the above comparison can be found in Table 5 and the axial force F
x
is selected as 100 N in the following discussion. The comparison results with regard to dynamic stiffness of angular contact ball bearing. (a) Axial stiffness and (b) Radial stiffness. The model parameters with regard to SKF 6205.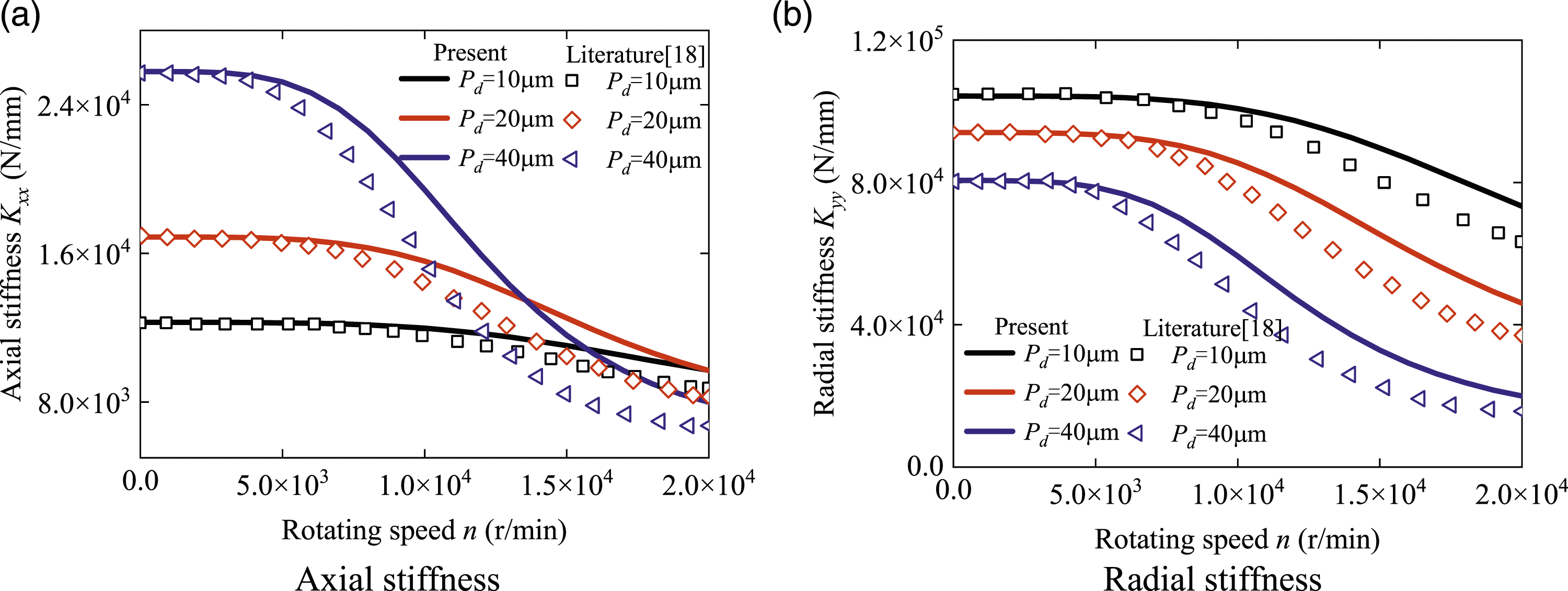
As one can see from Figure 9, the dynamic stiffness including axial and radial stiffness of angular contact ball bearing under certain axial force F x decrease with rotating speed increased. With radial clearance increased, the axial stiffness increases when the rotating speed is less than 12000r/min and decreases when the rotating speed is large than 15000r/min. When the rotating speed is less than 5000r/min, the calculation results with regard to dynamic stiffness of the presented model have good consistent with the corresponding results come from the existing literature. However, when the rotating speed is large than 5000r/min, there are obvious errors between the dynamic stiffness of the proposed model and the corresponding results come from the existing literature, it is worth noting that the variation tendency of the presented model and the existing literature has good consistency. The above evident error can be attributed to the difference of calculation formulations with regard to centrifugal and gyroscopic moment, the above differences is caused by raceway control hypothesis.
According to the above comparison results with regard to dynamic contact angle, contact force and stiffness, the accuracy, stability and versatility of the proposed dynamic model of angular contact ball bearing have been confirmed, it can be used to solve the dynamic characteristics of angular contact ball bearing under combined external loads.
The dynamic contact characteristic analysis of angular contact ball bearing
The model parameters with regard to B7005 C/P4.
Firstly, the influences of torque M
z
on the contact angle and contact force of angular contact ball bearing under axial force F
x
= 1000 N, radial force F
y
= 200 N and different rotating speed are investigated, the variations of contact angle and contact force are shown in Figure 10 and Figure 11, respectively. The circumferential variation tendency of contact angle and contact force with torque M
z
under static state. (a) Contact angle and (b) Contact force. The circumferential variation tendency of contact angle and contact force with torque M
z
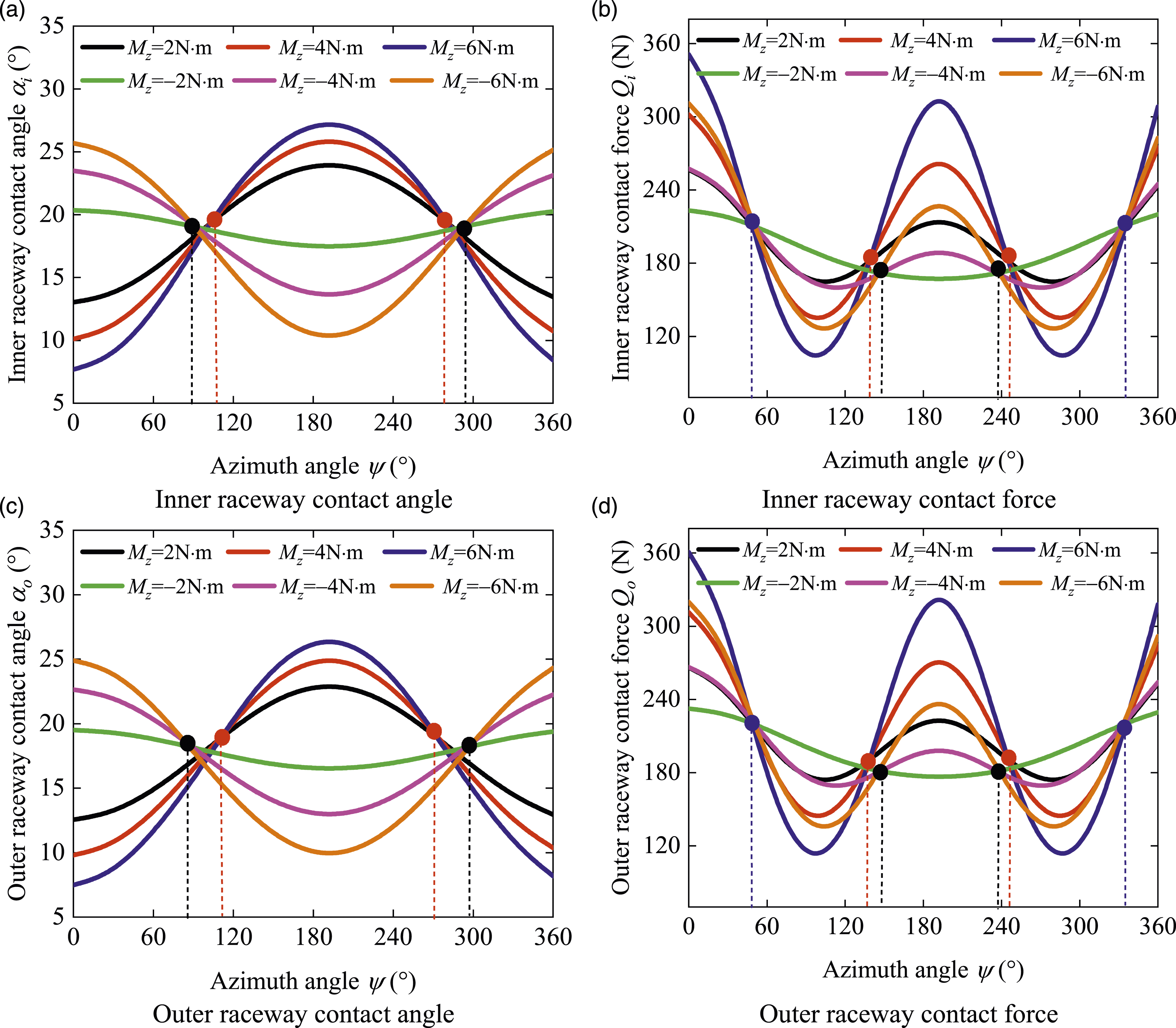
under rotating state. (a) Inner raceway contact angle, (b) Inner raceway contact force, (c) Outer raceway contact angle, and (d) Outer raceway contact force.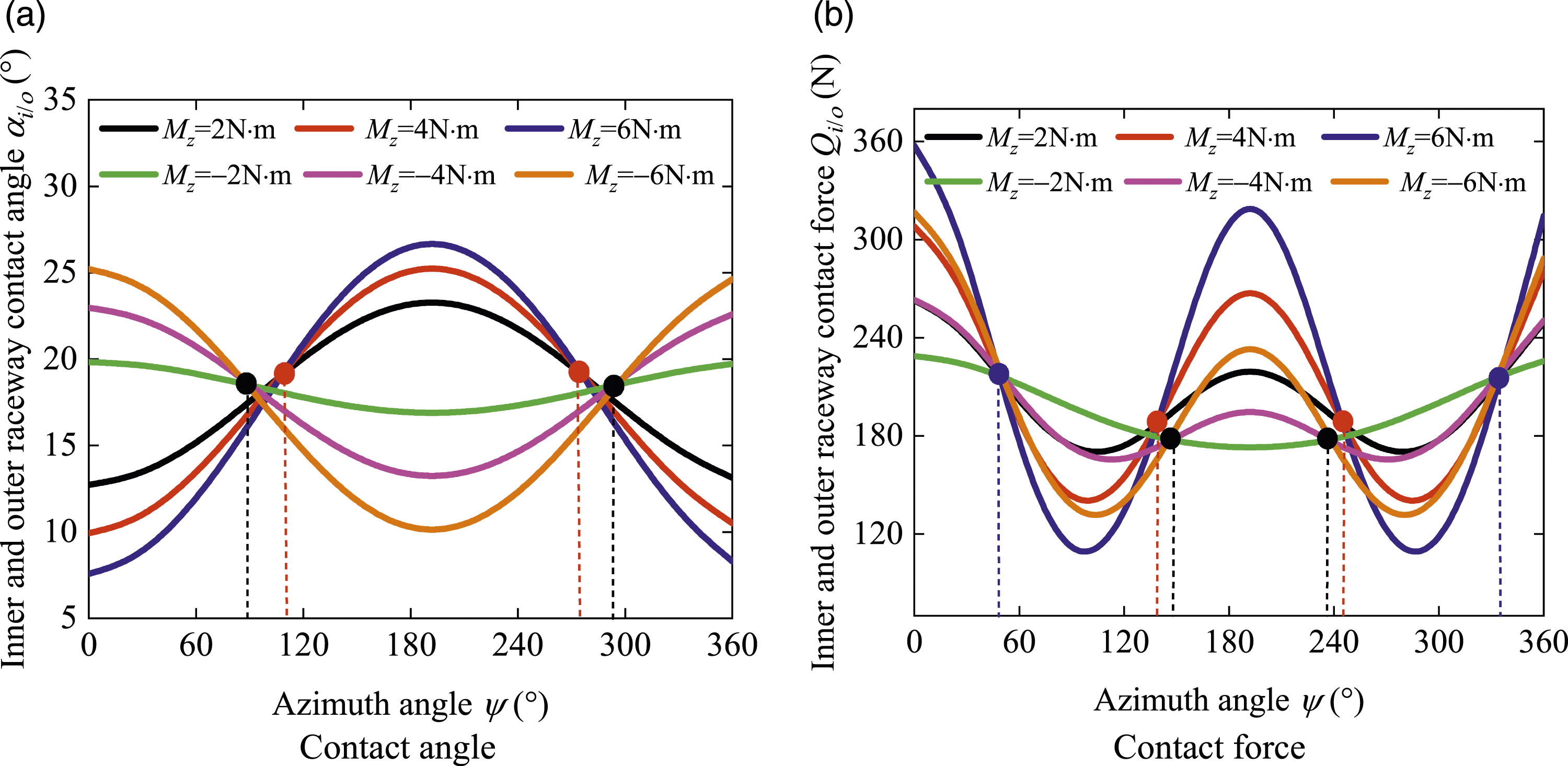
As described in Figure 10, the inner and outer raceway contact angles and contact forces change synchronously as the torque M
z
increase when the angular contact ball bearing is at rest. For contact angle, as the azimuth angle increase, the inner and outer raceway contact angles vary by means of cosine curve, the amplitude of cosine curve increases with the increase of torque M
z
. In addition, the variation tendency of the inner and outer raceway contact angles is opposite when the direction of torque M
z
changes. The symbols “
When the rotating speed of angular contact ball bearing increase to 20000r/min, the variation tendencies of contact angle and contact force are given in Figure 11. The inner and outer raceway contact angles and contact forces appear bifurcation phenomenon and the variation tendencies are consistent basically when the angular contact ball bearing is in a rotating state. The cosine curves of inner and outer raceway contact angles move up and down with the appearance of rotating speed, respectively. However, the W shape curve of inner and outer raceway contact forces move down and up with the appearance of rotating speed, respectively. The numbers of nodes including “
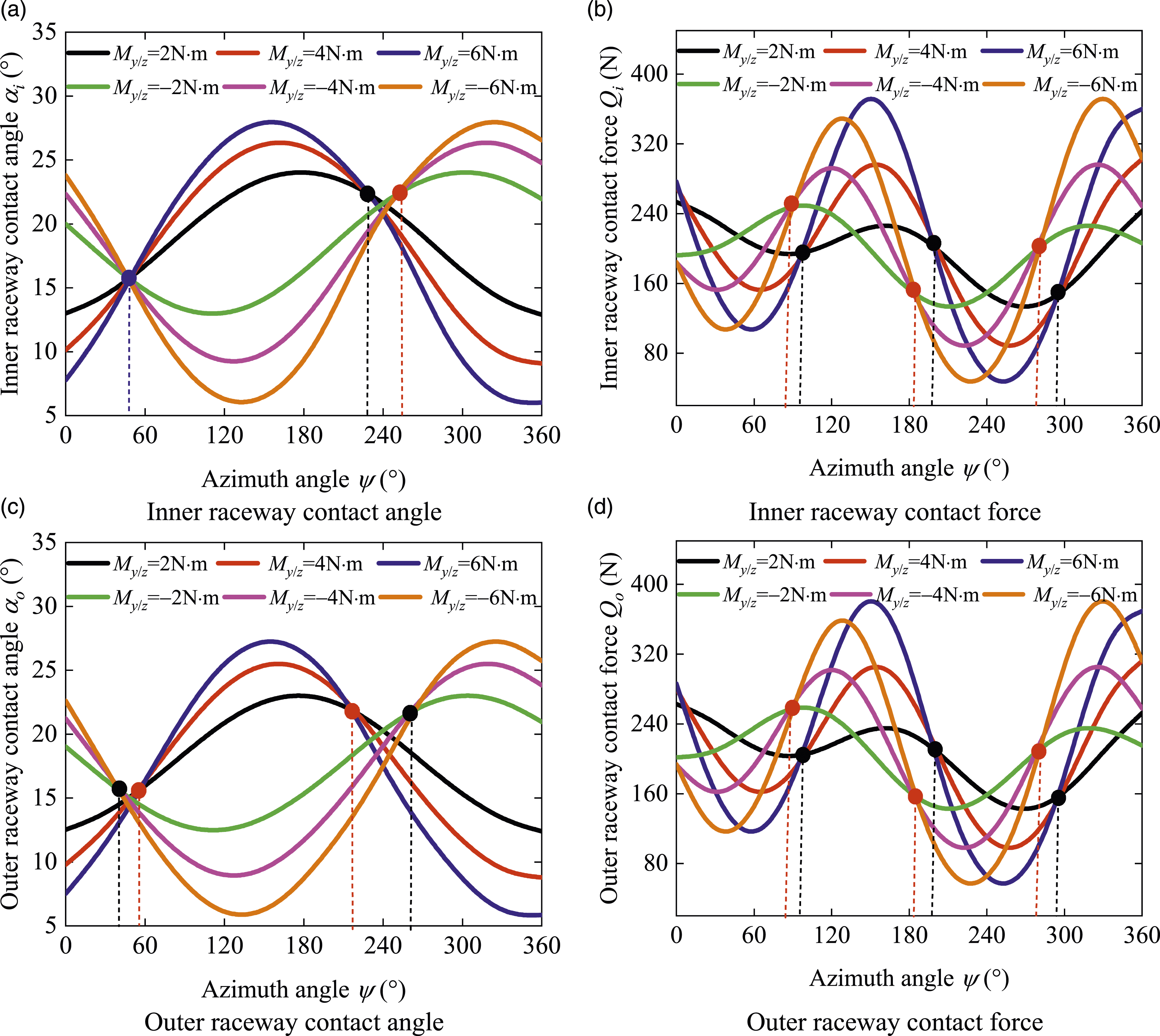
Secondly, the effects of torque M
y
on the contact angle and contact force of angular contact ball bearing under axial force F
x
= 1000N, radial force F
z
= 200N and different rotating speed are discussed, the variations of contact angle and contact force are shown in Figure 12 and Figure 13, respectively. The circumferential variation tendency of contact angle and contact force with torque M
y
under static state. (a) Contact angle and (b) Contact force. The circumferential variation tendency of contact angle and contact force with torque M
y
under rotating state. (a) Inner raceway contact angle, (b) Inner raceway contact force, (c) Outer raceway contact angle, and (d) Outer raceway contact force.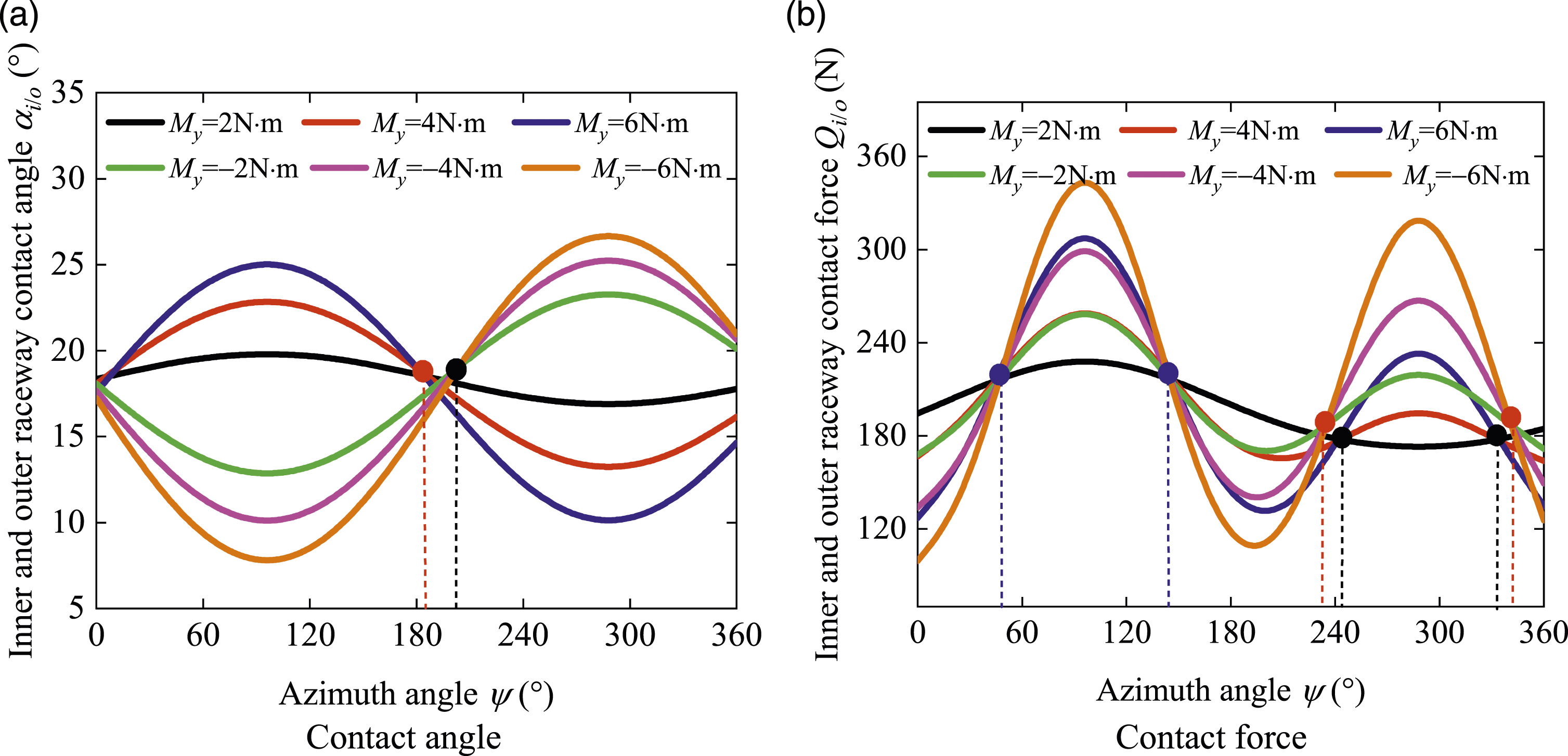
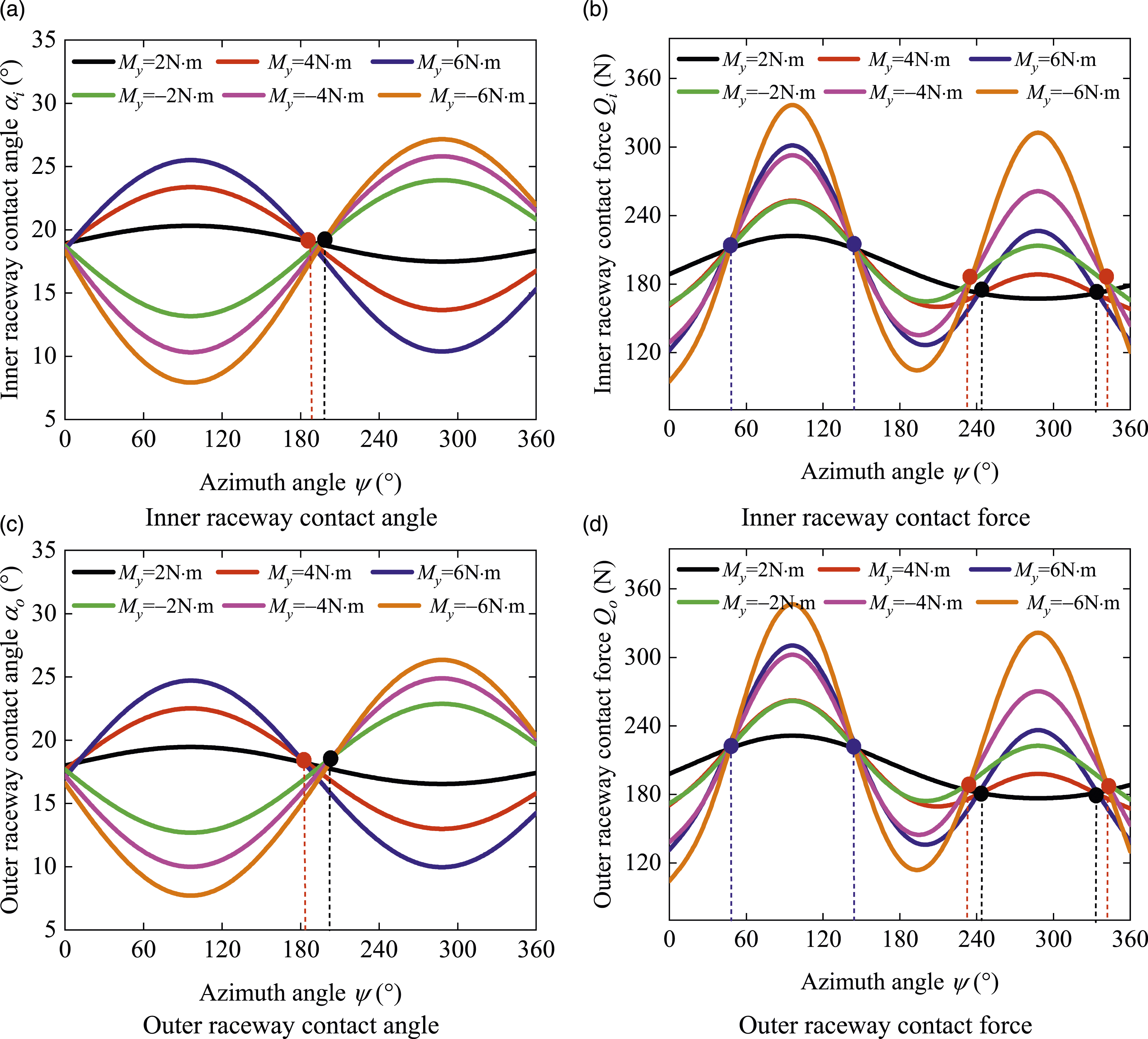
As shown in Figure 12, the inner and outer raceway contact angles and contact forces change synchronously as the torque M
y
increase when the angular contact ball bearing is at rest. For contact angle, as the azimuth angle increase, the inner and outer raceway contact angles vary by means of sine curve, the amplitude of sine curve increases with the increase of torque M
y
. In addition, the variation tendency of the inner and outer raceway contact angles is opposite when the direction of torque M
y
changes. The positions of node “
When the rotating speed of angular contact ball bearing increase to 20000r/min, the variation tendencies of contact angle and contact force are displayed in Figure 13. The inner and outer raceway contact angles and contact forces appear bifurcation phenomenon and the variation tendencies are consistent basically when the angular contact ball bearing is in a rotating state. The sine curve of inner and outer raceway contact angle move up and down with the appearance of rotating speed, respectively. However, the M shape curve of inner and outer raceway contact forces move down and up with the appearance of rotating speed, respectively. The variation tendency of nodes including “
Finally, the effects of torques M
y
and M
z
on the contact angle and contact force of angular contact ball bearing under axial force F
x
= 1000 N, radial force F
y
= F
z
= 200 N and different rotating speed are discussed, the variations of contact angle and contact force are shown in Figure 14 and Figure 15 respectively. The circumferential variation tendency of contact angle and contact force with torques M
y
and M
z
under static state. (a) Contact angle and (b) Contact force. The circumferential variation tendency of contact angle and contact force with torques M
y
and M
z
under rotating state. (a) Inner raceway contact angle, (b) Inner raceway contact force, (c) Outer raceway contact angle, and (d) Outer raceway contact force.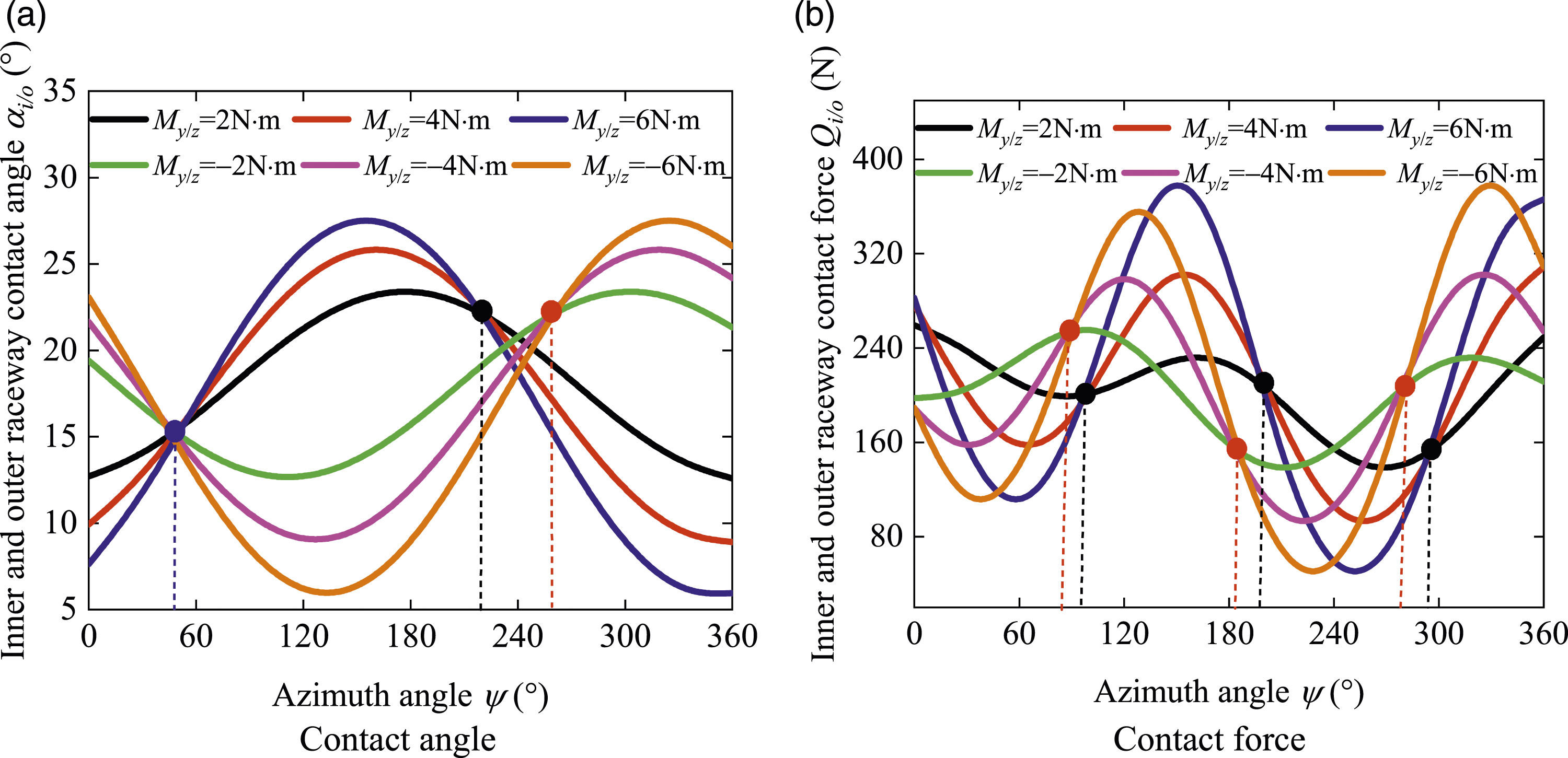
As one can see from Figure 14, the inner and outer raceway contact angles and contact forces change synchronously as the torques M
y
and M
z
increase when the angular contact ball bearing is at rest. For contact angle, as the azimuth angle increase, the inner and outer raceway contact angles vary by means of irregular curve, the amplitude of irregular curve increase with the increase of torques M
y
and M
z
. In addition, the variation tendency of the inner and outer raceway contact angles is opposite when the direction of torques M
y
and M
z
change. The positions of node “
When the rotating speed of angular contact ball bearing increase to 20000r/min, the variation tendencies of contact angle and contact force are displayed in Figure 15. The irregular curves of inner and outer raceway contact angle move up and down with the appearance of rotating speed, respectively. The positions and number of nodes “
The dynamic stiffness characteristic analysis of angular contact ball bearing
In this section, the dynamic stiffness characteristic analysis is carried out by investigating the influences of combined external working conditions including external force, torque and rotating speed on the diagonal and off-diagonal stiffness of angular contact ball bearing. The model parameters of angular contact ball bearing are the same as section 3.2.
Firstly, the effects of rotating speed and torque M
z
on the diagonal and off-diagonal stiffness of angular contact ball bearing under F
x
= 1000 N, F
y
= 200 N are investigated and the corresponding results are shown in Figure 16. The variation tendency of diagonal and off-diagonal stiffness with rotating speed and torque M
z
. (a) Diagonal stiffness (M
z
= 3000N⸱mm), (b) Diagonal stiffness (M
z
= −3000N⸱mm), (c) off-diagonal stiffness (M
z
= 3000N⸱mm), and (d) off-diagonal stiffness (M
z
= −3000N⸱mm).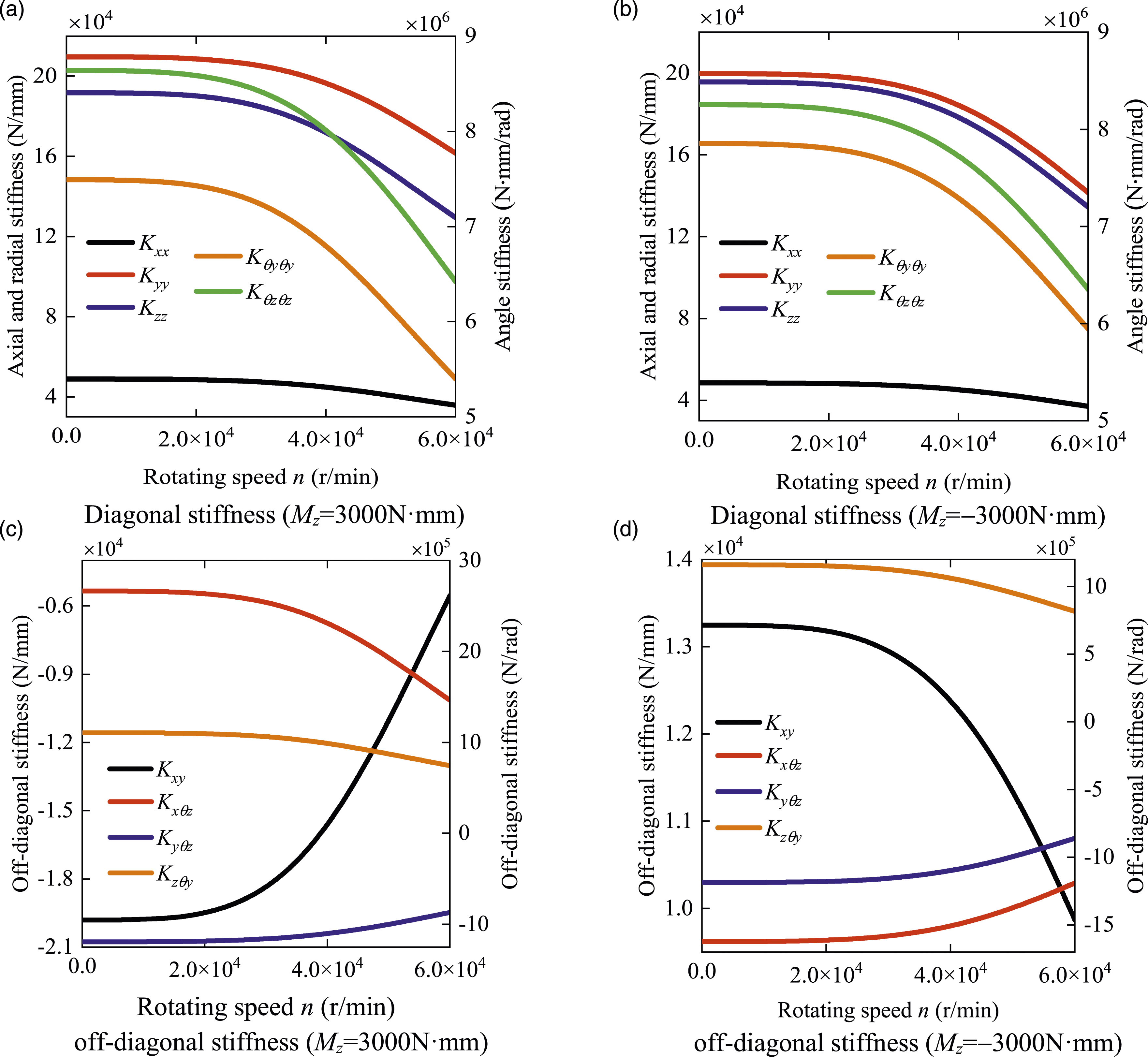
As one can see from Figure 16, when the torque M z is set as 3000 N⸱mm, the diagonal stiffness including K xx , K yy , K zz , K θyθy and K θzθz decreases in varying degrees with rotating speed increased and the decline of axial stiffness K xx is smallest compared with other terms of diagonal stiffness. The radial stiffness K yy is large than K zz and the angle stiffness K θzθz is large than K θyθy . With the increase of rotating speed, the K xy and K yθz of off-diagonal stiffness increases and the values of them are negative, the K xθz and K zθy of off-diagonal stiffness decrease and the values of them are positive. When the torque M z is set as −3000 N⸱mm, the radial stiffness K yy and K zz are very close, the differences of angle stiffness K θyθy and K θzθz decline compared with the results of original direction of torque M z . With rotating speed increased, the K xy of off-diagonal stiffness decreases and the K xθz of off-diagonal stiffness increases slightly, the variation tendency of K yθz and K zθy of off-diagonal stiffness is consistent with the results of original direction of torque M z .
Secondly, the effects of rotating speed and torque M
y
on the diagonal and off-diagonal stiffness of angular contact ball bearing under F
x
= 1000 N, F
z
= 200 N are analyzed and the corresponding results are shown in Figure 17. The variation of diagonal and off-diagonal stiffness with rotating speed and torque M
y
. (a) Diagonal stiffness (M
y
= 3000N⸱mm), (b) Diagonal stiffness (M
y
= −3000N⸱mm), (c) off-diagonal stiffness (M
y
= 3000N⸱mm), and (d) off-diagonal stiffness (M
y
= −3000N⸱mm).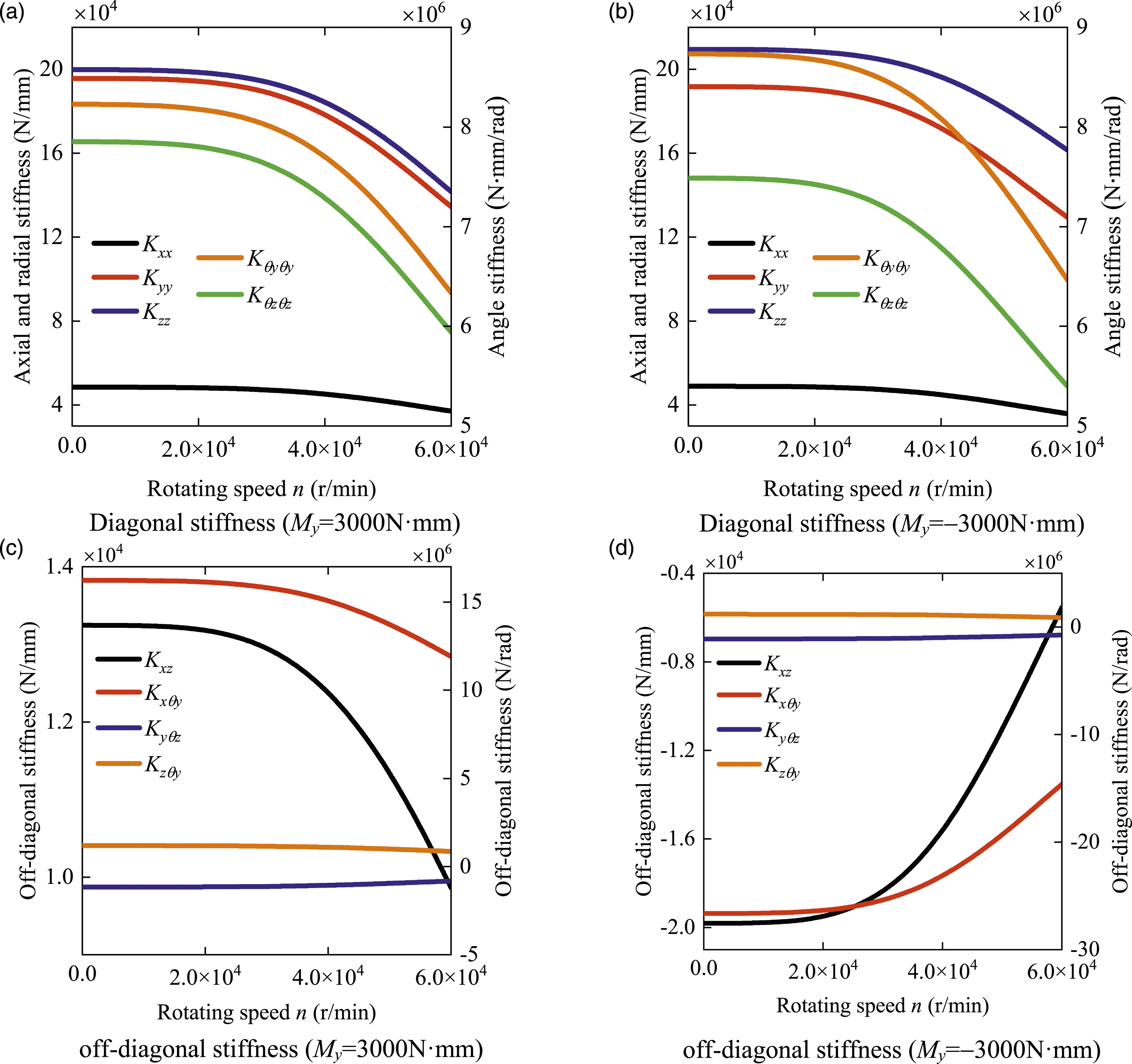
As shown in Figure 17, when the torque M y is set as 3000 N⸱mm, the variation tendency of diagonal stiffness is consistent with the corresponding results of M z = −3000 N⸱mm. However, the values of radial stiffness and angle stiffness are opposite to the corresponding results of M z = −3000 N⸱mm. The variation tendency of K xz , K yθz and K zθy of off-diagonal stiffness is the same as the K xy , K yθz and K zθy of M z = −3000 N⸱mm. The variation tendency of K yθz of off-diagonal stiffness decreases slightly. When the torque M y is set as −3000 N⸱mm, the variation tendency of diagonal stiffness is the same as the corresponding results of M z = 3000 N⸱mm. However, the values of radial stiffness and angle stiffness are opposite to the corresponding results of M z = 3000 N⸱mm. The variation tendency of K xz , K yθz and K zθy of off-diagonal stiffness is the same as the K xy , K yθz and K zθy of M z = 3000 N⸱mm. The K xθy of off-diagonal stiffness increases with rotating speed increased.
Finally, the influences of rotating speed and torques M
y
= M
z
on the diagonal and off-diagonal stiffness of angular contact ball bearing under F
x
= 1000N, F
y
= F
z
= 200 N are investigated and the corresponding results can be found in Figure 18. The variation of diagonal and off-diagonal stiffness with rotating speed and torque M
z
. (a) Diagonal stiffness (M
y
= M
z
= 3000N⸱mm), (b) Diagonal stiffness (M
y
= M
z
= −3000N⸱mm), (c) Off-diagonal stiffness 1 (M
y
= M
z
= 3000N⸱mm), (d) Off-diagonal stiffness 1 (M
y
= M
z
= −3000N⸱mm), (e) Off-diagonal stiffness 2 (M
y
= M
z
= 3000N⸱mm), and (f) Off-diagonal stiffness 2 (M
y
= M
z
= −3000N⸱mm).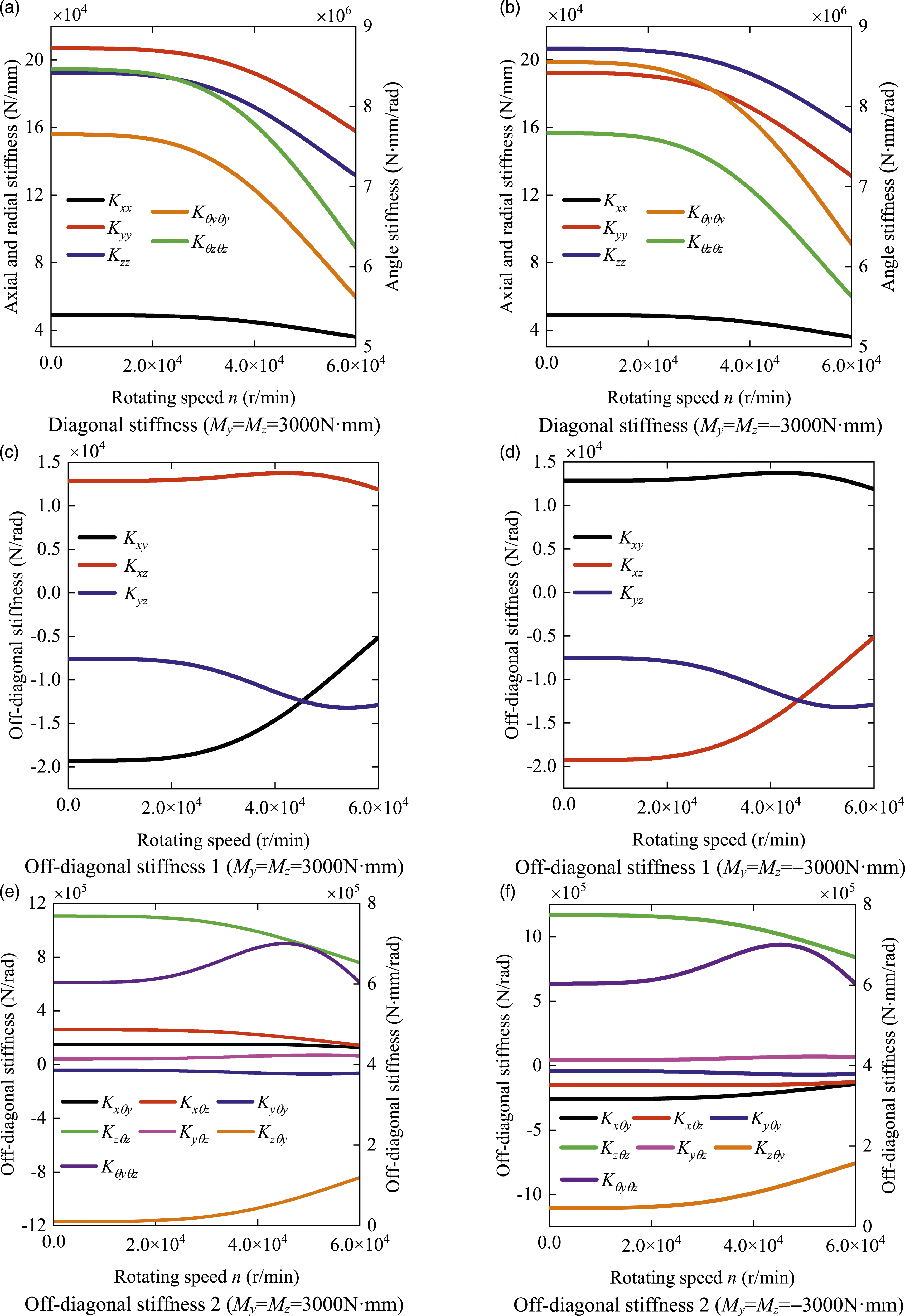
As shown in Figure 18(a) and (b), the variation tendencies of diagonal stiffness are consistent with the corresponding results of Figure 16(a) and Figure 17(b). Due to the external loads is very complex, the terms of off-diagonal stiffness are divided into off-diagonal stiffness 1 and off-diagonal stiffness 2 in the following discussion. When the torques M y = M z are set as 3000 N⸱mm, with the increase of rotating speed, the K xy of off-diagonal stiffness 1 increases and the value of K xy is negative, the variation tendency of K xz and K yz is symmetric. With rotating speed increased, the K xθy , K xθz , K yθy and K yθz of off-diagonal stiffness 2 decrease. The K θy θz of off-diagonal stiffness 2 increases first and then decreases, the variation tendency of K zθy and K zθz is symmetric. When the torques M y = M z are set as −3000N⸱mm, with the increase of rotating speed, the K xz of off-diagonal stiffness 1 increases and the value of K xz is negative, the variation tendency of K xy and K yz is symmetric. With rotating speed increased, the K xθy , K xθz and K yθy of off-diagonal stiffness 2 increase, the variation tendencies of K yθz , K θyθz , K zθy and K zθz of off-diagonal stiffness 2 is are consistent with Figure 18(e).
Conclusions
This article proposes a unified dynamic model of angular contact ball bearing under combined external loads based on nonlinear elastic Hertz contact theory and raceless control hypothesis by employing variable step size Newton Raphson iteration method. The validation of established model is confirmed by comparing with the existing literatures and the comparison results demonstrate the proposed model has better solution accuracy and higher computational efficiency. According to the above established dynamic model, the dynamic contact and stiffness characteristics of angular contact ball bearing under combined external loads are analyzed by investigating the influences of combined external working conditions on the dynamic contact parameters including contact angle and contact force and stiffness including diagonal and off-diagonal stiffness. Based on the above analysis, some conclusions can be concluded as follow: (1) The inner and outer raceway contact angles vary by means of different shape curves with azimuth angle under different external load working conditions and the amplitude of the above curves increase with the increase external loads (torque) and there are some nodes in the above curves. When the direction of external loads (torque) is changed, the curves with regard to contact angle appear symmetric transformation. The inner and outer raceway contact angles separate with rotating speed increased, the inner and outer raceway contact angles increase and decrease respectively. (2) The variation tendency of inner and outer raceway contact forces is consistent with the above contact angles. However, when the direction of external loads (torque) is changed, the variation tendency of curves with regard to contact force keeps constant and the amplitude of curves increases evidently. The inner and outer raceway contact forces separate with rotating speed increased, the inner and outer raceway contact forces decrease and increase respectively. (3) The K
xx
, K
yy
, K
zz
, K
θyθy
and K
θzθz
diagonal stiffness of angular contact ball under combined external load working conditions decrease in varying degrees with rotating speed increased. When the direction of external loads (torque M
y
or M
z
) is changed, the differences of radial stiffness and angle stiffness decrease. When the external loads change from M
z
to -M
y
and from My to -Mz, the K
yy
and K
zz
of radial stiffness are converted to each other, the K
θyθy
and K
θzθz
of angle stiffness are converted to each other. The above conversion can also be produced when the direction of external loads torques M
y
= M
z
are changed. For off-diagonal stiffness of angular contact ball bearing, with rotating speed increased, the off-diagonal stiffness decreases when the value of off-diagonal stiffness is positive and the off-diagonal stiffness increases when the value of off-diagonal stiffness is negative. However, under combined external working condition (As shown in Figure 18), the off-diagonal stiffness term produce the coupling angle stiffness term of K
θyθz
, the variations of K
zθy
and K
zθz
of off-diagonal stiffness are symmetric with rotating speed increased.
In summary, the proposed model can be used to analyze the dynamic contact and stiffness characteristics of angular contact ball bearing under combined external load working conditions for the vibration behaviors analysis and fatigue prediction of angular contact ball bearing provide theoretical basis and technical guidance.
Footnotes
Acknowledgments
The authors would like to thank the anonymous reviewers for their very valuable comments.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the the State Key Laboratory of High Performance Complex Manufacturing (ZZYJKT2021-07), Key Laboratory of Vibration and Control of Aero-Propulsion System; (VCAME202006), National Natural Science Foundation of China (Grant No. 52075554), the Natural Science Foundation of Hunan Province of China (2021JJ30841 and 2022JJ20070), and Central South University Innovation-Driven Research Program, China (Grant No. 2023CXQD049).
Appendix A
The appendix contains the derivation process of contact deformation coefficient of ACBB.
Appendix B
The partial derivatives of equilibrium equations with respect to the variables X1j, X2j, δ
ij
, δ
oj