
Abstract
Establishing an energy harvesting device to supply sustainable energy to deep sea sensors is a challenging task due to the complex subsea marine phenomenon. To overcome this, we propose a two-magnet KMC energy harvester hanging on the cabin of the ship with a spherical bearing. The magnets connected with springs move vertically up and down when the ship is periodically actuated by surface waves, generating electricity to power the deep sea sensors through a cable. We present a case study using wave speed (Uow = 2.0 m/s), wave amplitude (Ho = 0.4 m), and wave length (λ = 4.0 m) to demonstrate the efficacy of the two-magnet energy harvester. Before optimizing the energy harvester, a sensitivity analysis is conducted on the electrical power with respect to marine parameters and the energy harvester’s geometric parameters. To maximize the electrical power, we adopt a Cuckoo Search Algorithm as an optimizer. By using the objective function of root-mean-square electrical power in conjunction with the Cuckoo Search, we obtain optimal electrical power. Simulations reveal that the energy harvester produces 0.1497 Watts of power.
Introduction
In the past decade, offshore exploration for oil and natural gas has significantly increased, leading to the discovery of more resources. However, the potential for oil and gas pipeline leaks or ruptures during natural disasters, such as earthquakes and storms, has made it necessary to establish a monitoring system that can detect such incidents. This monitoring system requires a large number of environmental sensors, which need a sustainable source of electricity to function continuously. Therefore, it is essential to find an easy and sustainable way of generating electrical energy for the sensors. To address this issue, the design of a self-generated energy harvester that can extract energy from sea currents is a viable approach.
Common methods of power generation include piezoelectric power generation, which is suitable only for high-frequency vibration systems. However, wave reciprocating motion falls within the low-frequency domain, making piezoelectric power generation unsuitable. To resolve the power supply issue, self-generated energy harvesters that extract energy from sea currents have been developed. Two types of electricity generation systems, namely, cantilever systems1,2 and spring-mass systems,3,4 have been developed. While cantilever systems are suitable for smaller vibrations, they are mainly limited to higher frequencies and smaller systems such as MEMS. 5 In contrast, spring-mass systems are more suitable for extracting energy from low-frequency and large-displacement vibrations, such as those present in sea wave environments.
Several researchers have developed energy harvesting systems using ambient air vibrating motion, 6 vibrating electromagnetic energy extractors,7–10 and linear generators using wave motion, 11 but these systems are primarily limited to onshore applications. Others have suggested piezoelectric power generation systems using offshore buoys and waves,12–14 but the electrical power output is usually small due to the low-frequency of ocean currents. An et al. 15 in 2022 utilized electromagnetic energy harvesting to generate electrical power for condition monitoring sensors. Later, research by Muscat et al. 16 suggested that vibrational energy harvesters offer a promising solution for powering sensors, especially in areas with prevalent vibrations. Among different types of vibrational harvesters, electromagnetic ones stand out for their capacity to capture kinetic energy within a low-frequency range. Kurt et al. 17 introduced an elementary electromagnetic energy harvester featuring two magnets in 2023. Their study focused on harnessing electricity from a broad spectrum of vibrational sources. The findings demonstrated that this electromagnetic device can efficiently harvest power across a wide frequency range, spanning from 2 Hz to 1.5 KHz. Its cost-effective and straightforward design makes it suitable for various applications, enabling continuous energy harvesting from diverse ambient vibrations. In addition, Digregorio and Redout, 18 in 2024, introduced a compact electromagnetic energy harvester (EMEH) comprising two coils within a head-to-head permanent magnet tower. Their results showed that this inertial EMEH, operating at 10 Hz and 1.32 g RMS acceleration, consistently generates an output power of 1696 µW, making it suitable for biomedical and wearable applications.
In previous studies, Chiu et al. 19 proposed a sustainable energy harvester installed on the sea bed, but the small thrust of the ocean current resulted in a low induced electricity output. Later, Chiu 20 developed an electrical energy harvesting system using a long rod connected to a buoy, but the study did not address the issue of unforeseen fatigue and shearing problems of the rod caused by strong deep-sea currents. To overcome this issue, Chiu et al. 21 developed a subsea generator, replacing the long rods with cables. The induced electricity from the subsea generator can be intermittently generated through unidirectional rotation when the buoy moves up and down with the wave to pull and release the cable. However, the lateral forces of ocean currents on the cable can decrease the induced electricity output from the submarine generator. Furthermore, Chiu and Cheng 22 devised a wave energy harvesting device designed for use in a lake, aimed at enhancing the extraction of wave energy.
In the past, installations were directly exposed to water waves underwater, which posed risks due to unpredictable sea conditions. Cross waves and wind waves underwater could cause damage and corrosion to the equipment. Although underwater power generation equipment 21 could offer higher electrical power, the primary drawback is the risk associated with operating in hazardous underwater conditions.
To address the drawbacks mentioned above, the study we present here is to place the energy harvesting system on the water surface to avoid hardware damage issues. This study utilizes a mechanical vibration system with parameters K (spring stiffness), M (system mass-magnet), and C (damping effect), combined with coil-wound induction coils, to perform magnetic induction power generation. This magnetic-electric induction system is designed for low-frequency vibration sources. The design of this energy harvesting system (as shown in Figure 1) is portable, so to increase its power generation capacity, multiple independent compartments can be arranged within ship-related tools. The energy harvesting device is designed to avoid unforeseen risks of the subsea, such as lateral forces and harsh underwater conditions. To keep the energy harvester in a vertical position when the ship tilts, a spherical bearing and gravity effect are employed. In this position, the energy harvester can generate sustainable electricity offshore by utilizing the base-excitation of the cabin, which is periodically actuated by the sea current. The two-magnet energy harvester, surrounded by two sets of coils, generates induced electrical power when magnetic flux variations occur due to the relative motion of the magnets and the energy harvester base excited by the sea current. A two-magnet energy harvester installed on the deck of a ship which has been excited up and down periodically by the surface wave.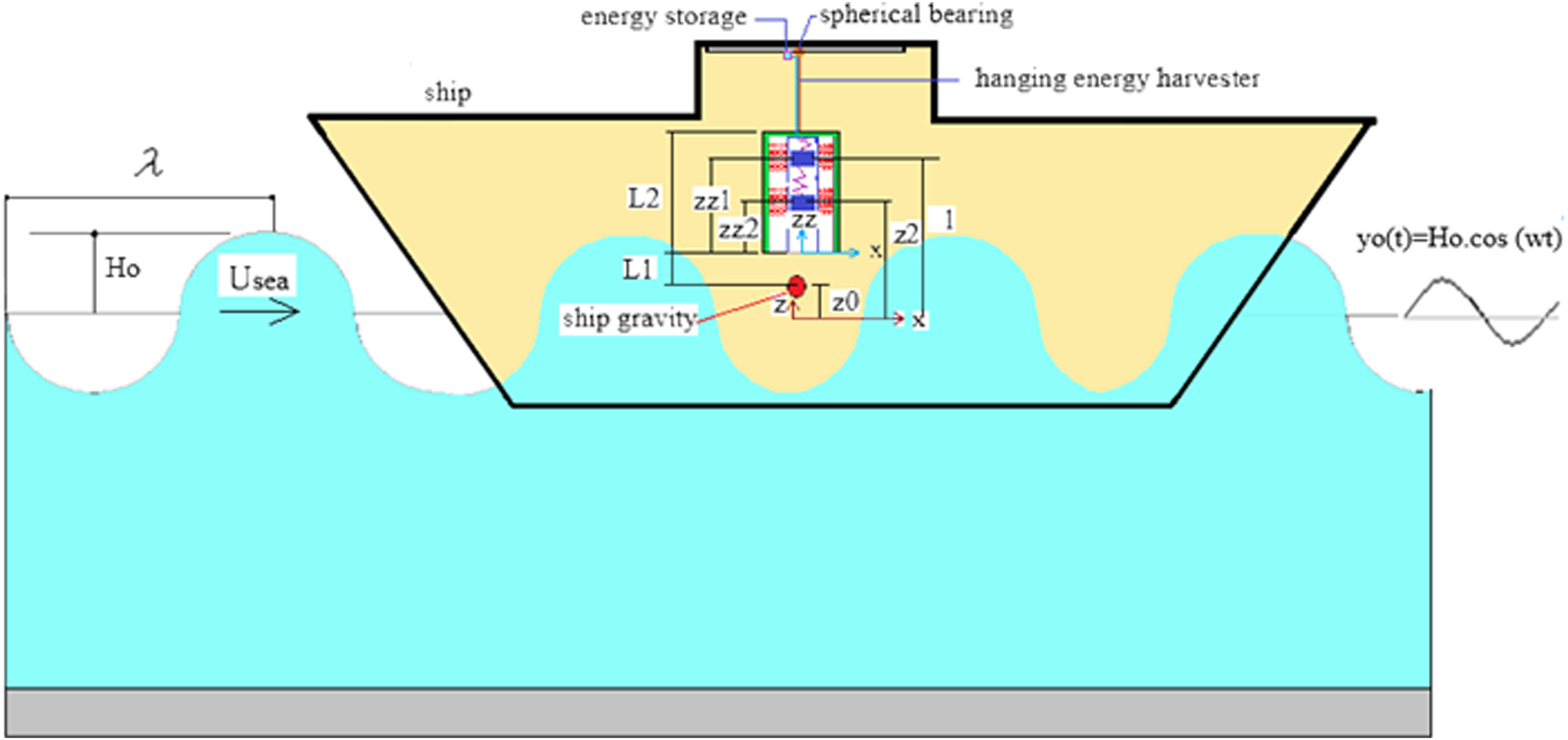
To maximize the electrical power output, an optimizer is necessary. Traditional gradient methods 23 have a limitation in optimization as they rely on a gradient-guided approach that can potentially lead to local optima. In contrast, the Cuckoo Search algorithm, a more recent metaheuristic optimization algorithm, has the ability to avoid local optima and move towards the global optimum. Swarm intelligence algorithms have proven successful in solving complex optimization problems in engineering, including genetic algorithms (GA), 24 particle swarm optimization (PSO), 25 differential evolution (DE), 26 ant colony optimization (ACO), 27 artificial immune methods (AIM), 28 and simulated annealing (SA). 29 Research by Al-Abaji 30 indicates that cuckoo search achieves better results than PSO and GA. The Cuckoo Search Algorithm is a nature-inspired metaheuristic algorithm that draws its principles from the brood parasitism observed in certain cuckoo species, combined with Levy flights random walks. To efficiently search a global solution, The Cuckoo Search Algorithm is then adopted in optimizing our energy harvesting system.
Therefore, this study employs the cuckoo search algorithm to optimize the ship-based energy harvesting device.
Mathematical background
The system includes (1) spherical bearing unit; (2) energy harvesting unit; (3) energy storage unit. The energy harvesting system utilizes a spherical bearing unit, supporting a dual-mass point energy harvester connected to an electromagnetic induction system, and coupled with a charging unit. The upper part of the spherical bearing unit can be hung with hooks to suspend the energy harvester in any compartment of a ship. Due to the combined effect of the energy harvester’s weight and the freely rotating spherical bearing, the energy harvester’s shell remains vertical. Therefore, as the ship rocks in all directions due to waves, the energy harvester’s shell maintains its vertical position, while the dual-mass point magnets and springs inside the shell undergo vertical oscillations, performing base-excitation mechanical vibrations. Using the Lagrange equation energy method, the governing equation for base-excitation mechanical vibrations is derived. The base-excitation source is the reciprocating vibration of waves, with damping in the system coming from mechanical damping and magnetic-electric damping generated by coil-wound induction. For problem solving, we use the real and imaginary parts of the complex method to represent external forces acting on the system, to solve for the displacement and velocity of the two magnets in the mechanical reciprocating vibration. We also calculate the induced electromotive force and corresponding induced electrical power due to changes in magnetic flux using Faraday’s law.
Base-excitation motion
In Figure 1, the energy harvester is shown hanging on top of the ship’s cabin. To ensure that the energy harvester remains in a vertical position regardless of the ship’s tilt in any direction, a spherical bearing and gravity center effect are utilized, as illustrated in Figure 2. Consequently, the two-magnet energy harvester will be excited vertically by the wave, resulting in periodic upward and downward motion. This movement, as depicted in Figure 3, is how the energy harvester will be actuated by the wave. A hanging type energy harvester keeping in vertical position. A two-magnet energy harvester.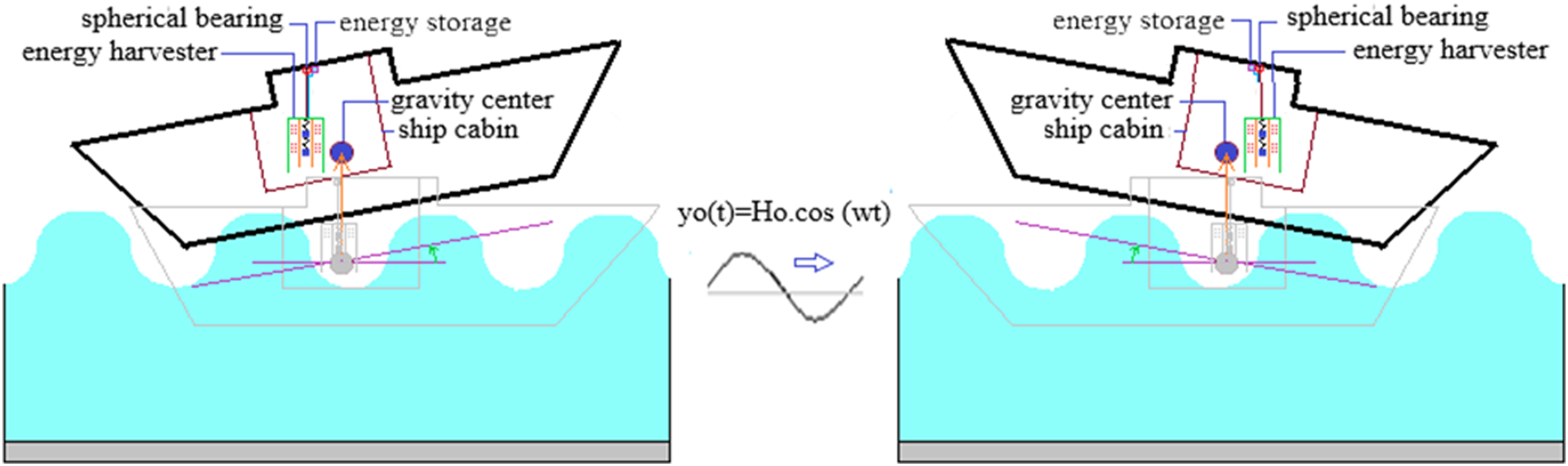
As depicted in Figures 1 and 3, the base-excitation motion at the top of the cabin is induced by the surface wave as


Dynamic system model
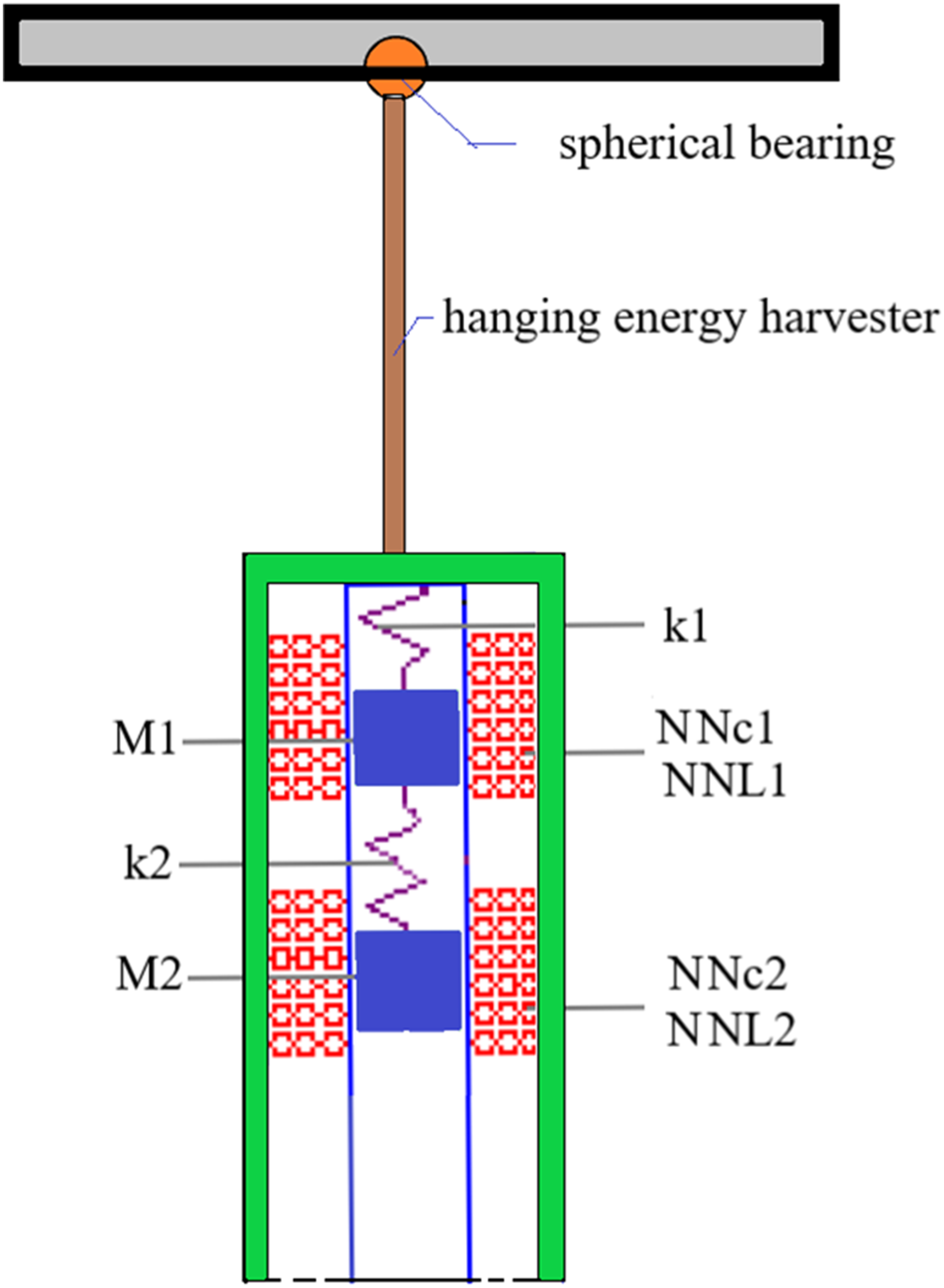
A mathematical model of the two-magnet hanging type energy harvester is analyzed as a KMC (spring + mass + damper) system and displayed in Figure 4. A scheme of the two-magnet hanging energy harvester.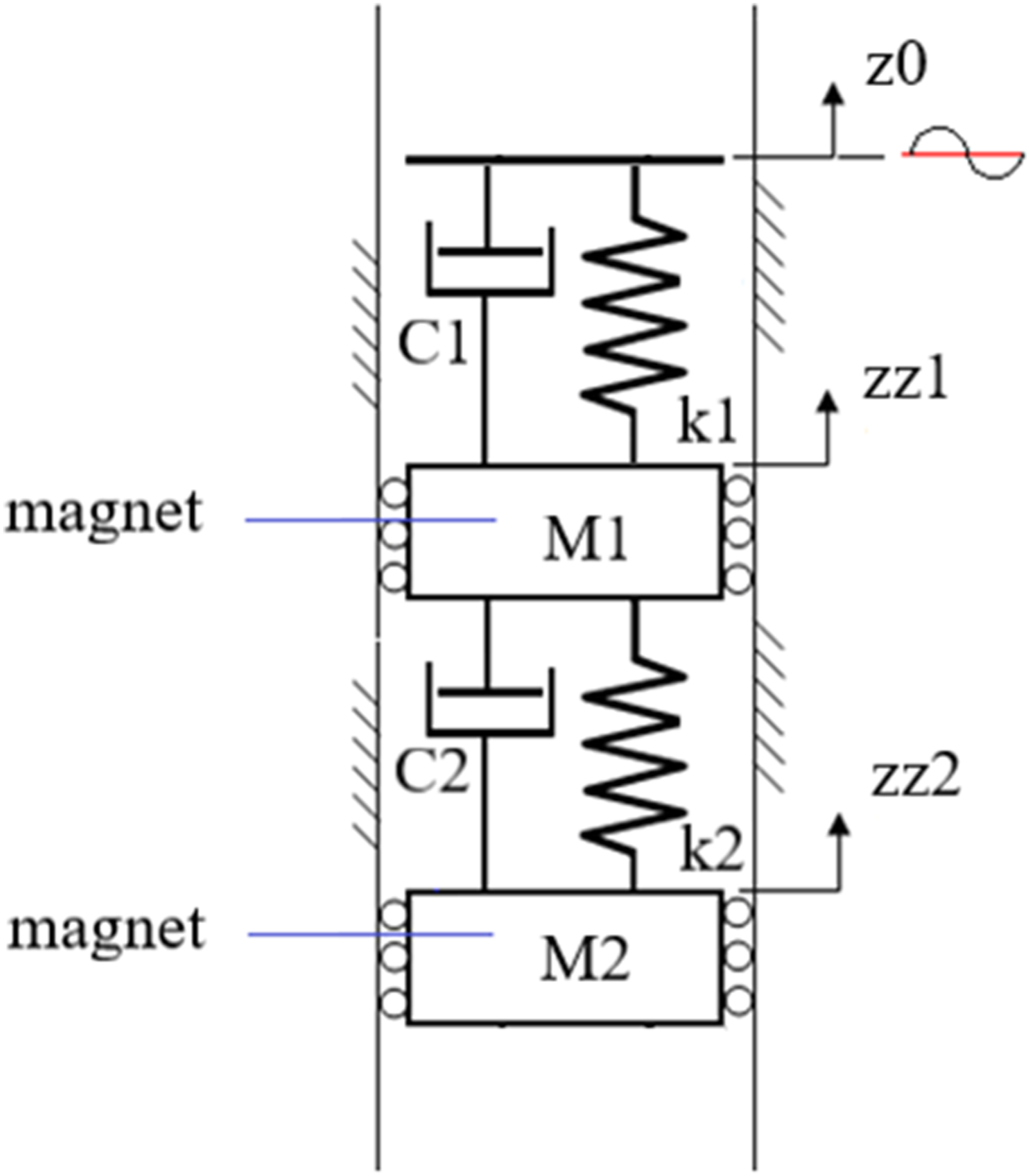
Using the energy equations yields



Using the Lagrange function



As deduced in Appendix A, the displacements of zz1(t) and zz2(t) are


The relative displacement of magnet #1 (M1) relating to the top of the cabin is

Similarly, the relative displacement of magnet #2 (M2) with respect to the top of the energy harvester can be expressed as

Review of electromagnetic-based electricity22,23
The jth set of coils, which surround the jth magnet and consist of NNc(j) turns, is depicted in Figure 5. Based on the derivation in Appendix B and considering the number of coil layers (NNL1), the electrical voltage induced by the kth turn of the coil is given by The allocation of coil surrounding magnet with NNc(j) turns.
To calculate the total electrical voltage εεT(j) induced by the jth coil set, the electrical voltages (εεT(j, k)) induced in all coil turns (k) of the jth set needs to be summed up as follows
Taking into account the number of coil layers NNL(j) of the jth coil set, the total electrical voltage εεT(j) and electrical current IT(j) of the jth coil set can be expressed as
Regarding the root-mean-square voltage induced by the jth coil set, it can be expressed as follows
The total root-mean-square voltage (

The related electrical power is given as

Moreover, the related electrical power in root-mean-square term can be express as

Ship-base energy harvester model verification
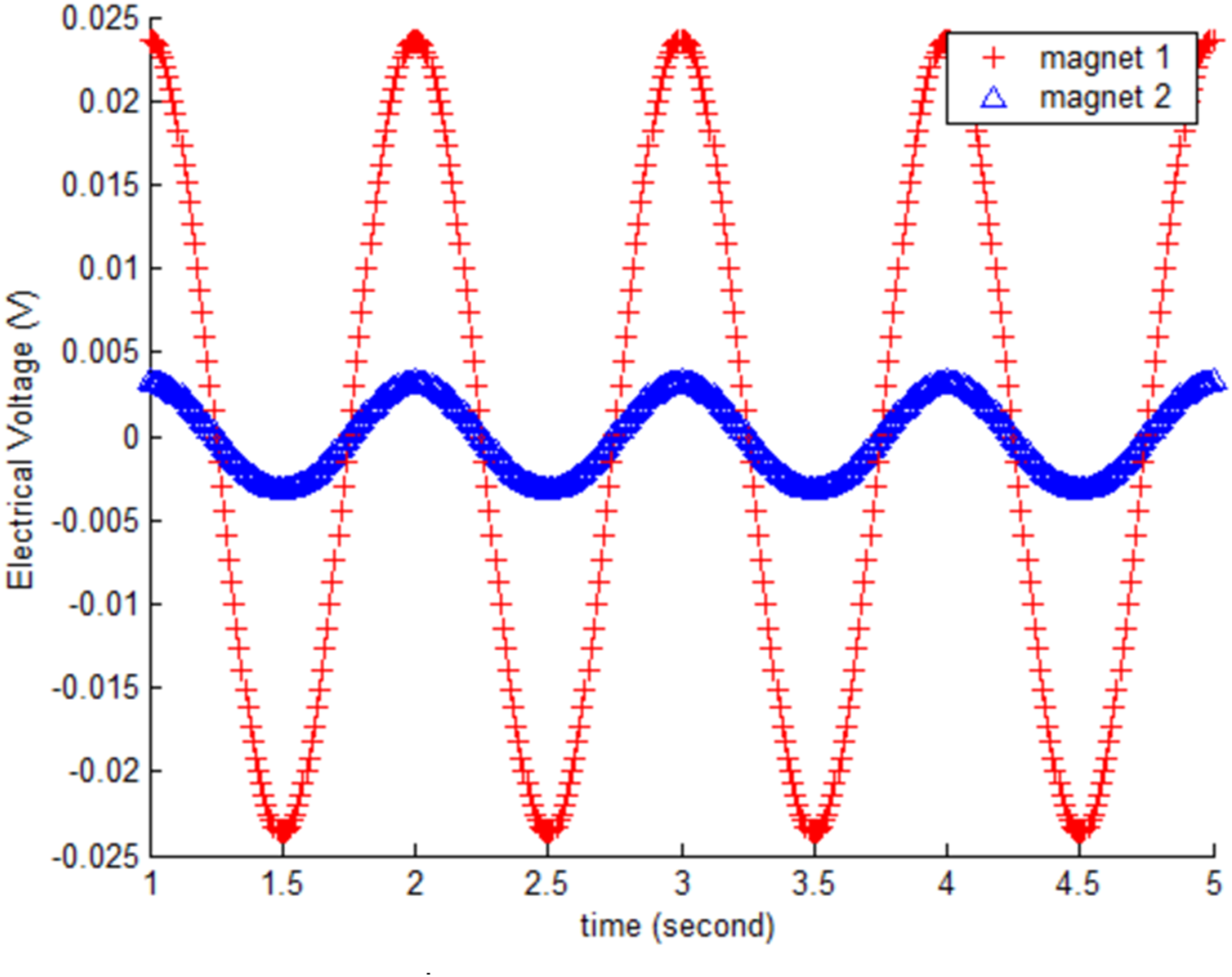
In Figure 6, the experimental setup involves an electrical power generating system. A ceiling attached to the spherical bearing of the energy harvester is periodically moved up and down. To capture the vibratory energy of the system, a Volt Ohm Milliammeter (VOM) connected to the energy harvester is used. The energy harvester, as depicted in Figure 6, consists of two sets of magnets surrounded by three sets of coils. Each coil has 42 turns distributed across seven layers, while each magnet measures 0.02 m in diameter and 0.02 m in height. The stiffness of the spring is 98 N/m. One scenario with a Ho value of 0.15 m and an angular frequency of 1 Hz is considered. Using equations (10a)–(10b) to calculate the theoretical electrical voltage, the results are plotted in Figure 7. The figure shows that the peak values of the electrical voltage at Ho = 0.15 are 0.028 volts. Simultaneously, experimental data obtained through the VOM indicates a peak power value of 0.03 volts. The theoretical total peak values of 0.028 volts closely align with the experimental data of 0.03 volts. The deviation between the theoretical values and experimental data falls within the range of 0.002 volts. These discrepancies may be attributed to potential measuring errors. However, given the small magnitude of the error, the theoretical model for the energy harvesting system appears acceptable for subsequent calculations. An experimental platform used to simulate the ship-based energy harvesting system. The theoretical electrical voltage to time at Ho = 0.15 m.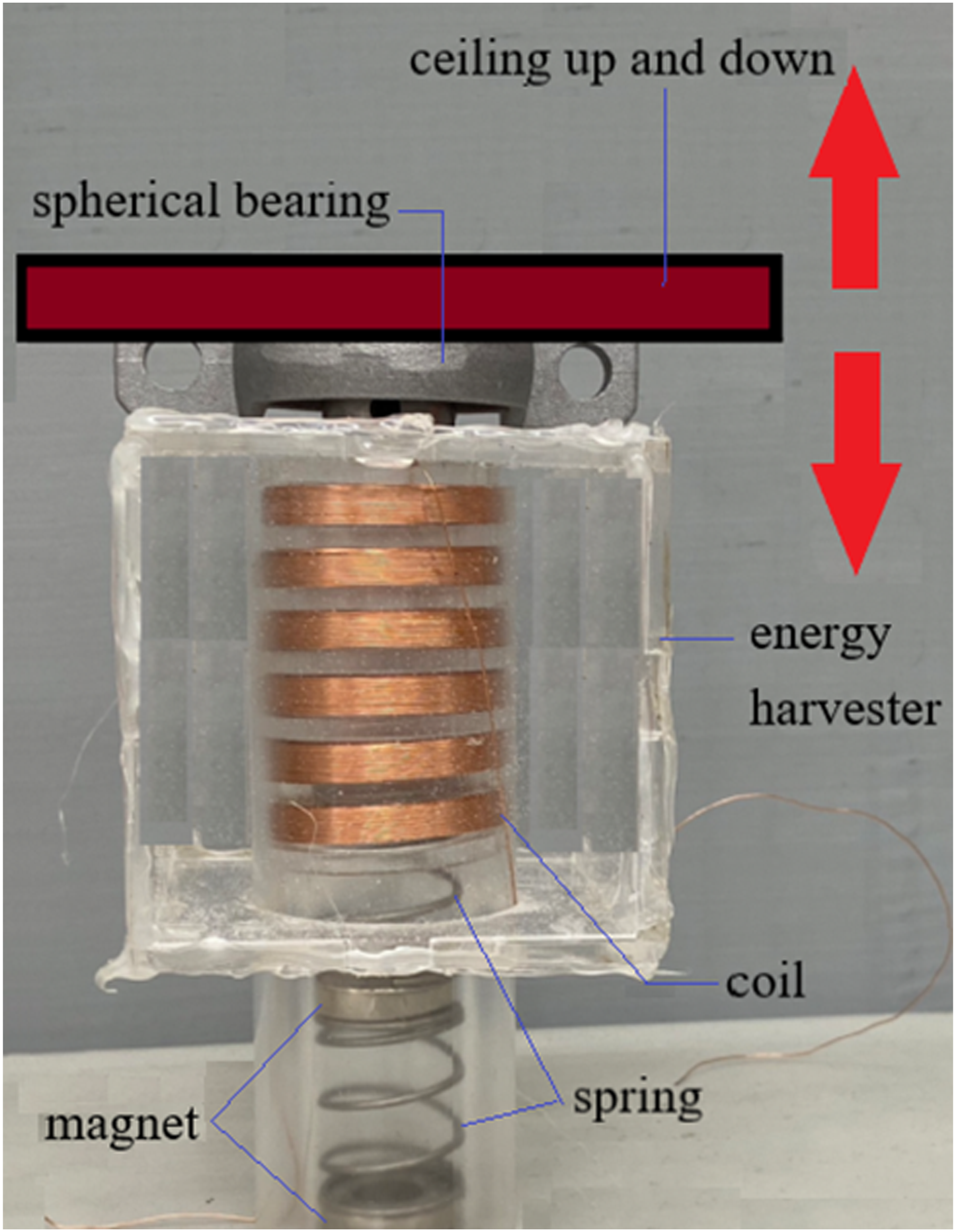
Sensitivity assessment
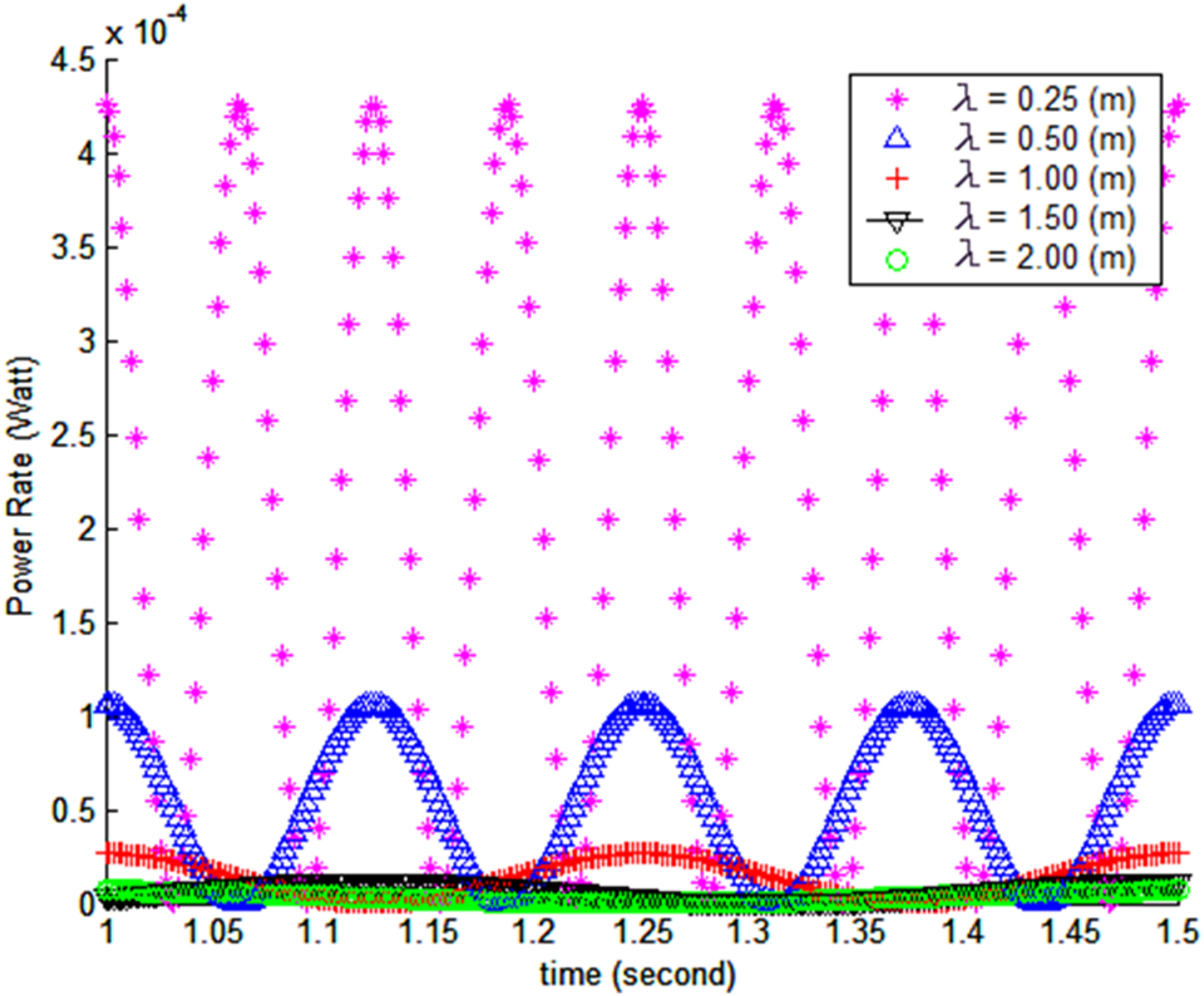
Before optimizing the two-magnet hanging energy harvesting device, we conducted a sensitivity analysis of the electrical power with respect to marine parameters and energy harvester’s geometric parameters. In accordance with the criteria of ocean waves with a ratio of wave amplitude to wave length of 1/7,
30
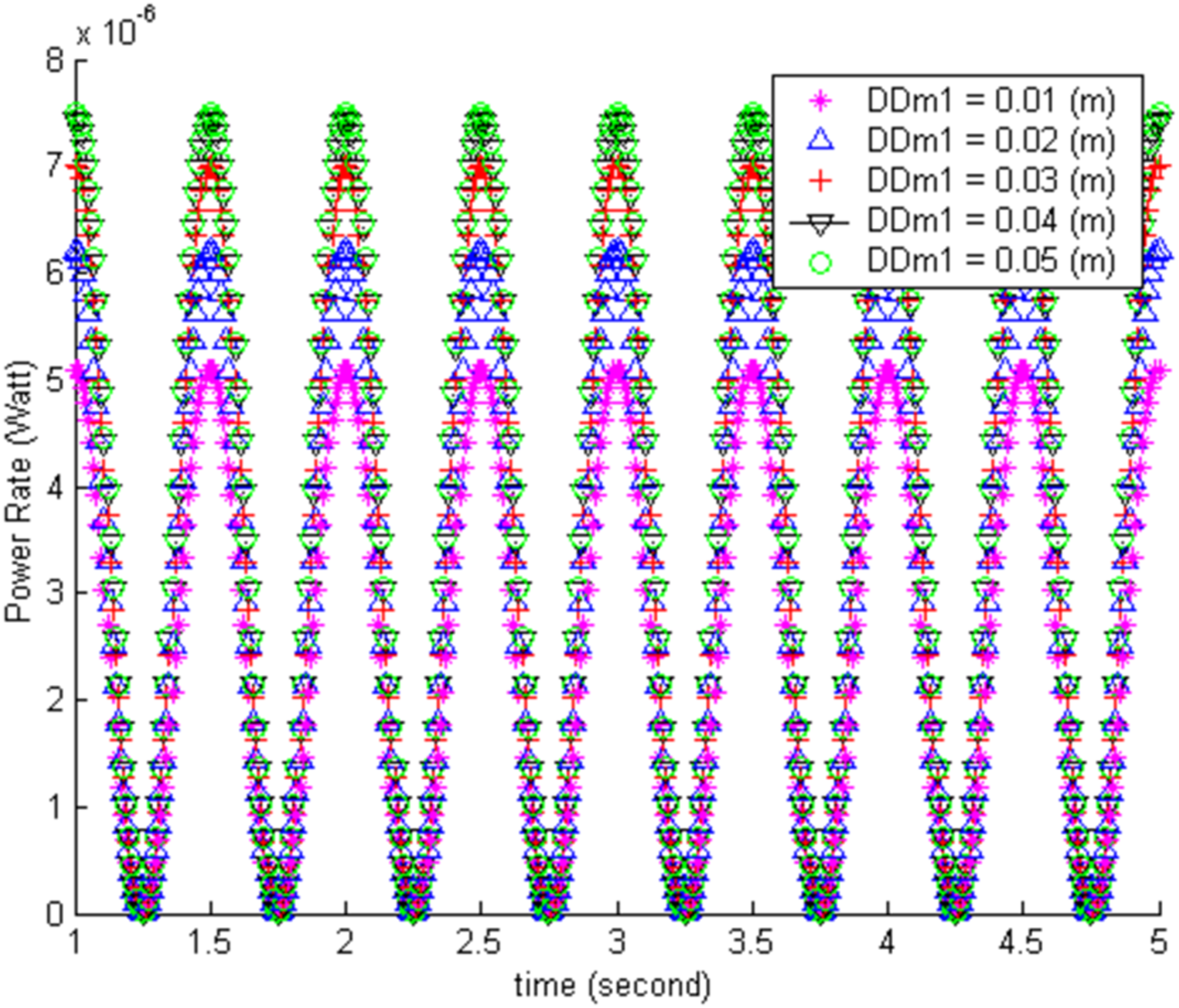
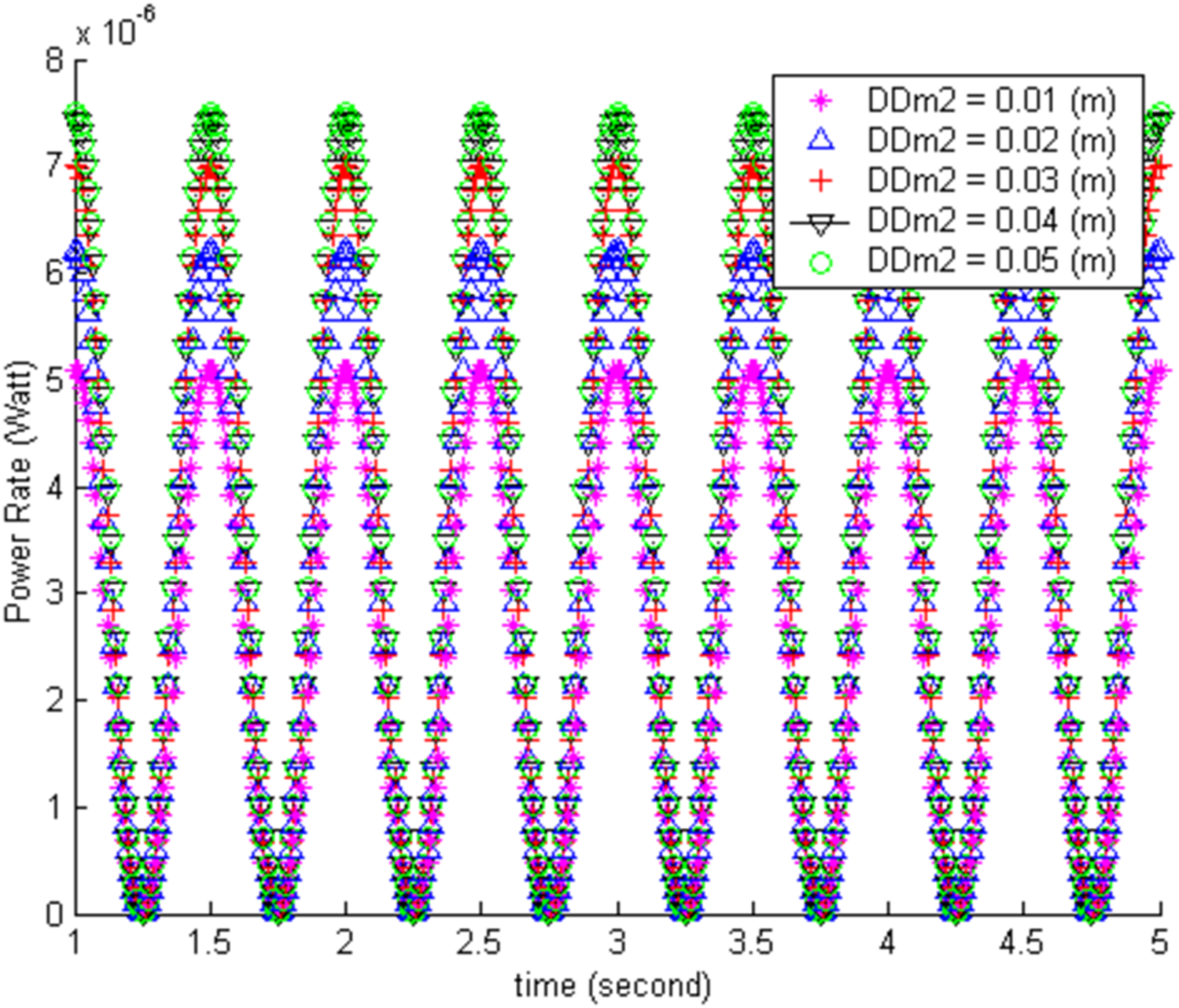
we selected a slope of 1/10 for wave amplitude (Ho) to wave length (λ). Using equation (13), we calculated the induced electrical power The influence of induced electrical power relating to H0. λ The influence of induced electrical power relating to λ. The influence of induced electrical power relating to DDm1. The influence of induced electrical power relating to DDm2. The influence of induced electrical power relating to HHm1. The influence of induced electrical power relating to HHm2. The influence of induced electrical power relating to k1. The influence of induced electrical power relating to k2. The influence of induced electrical power relating to NNC1. The influence of induced electrical power relating to NNC2. The influence of induced electrical power relating to NNL1. The influence of induced electrical power relating to NNL2.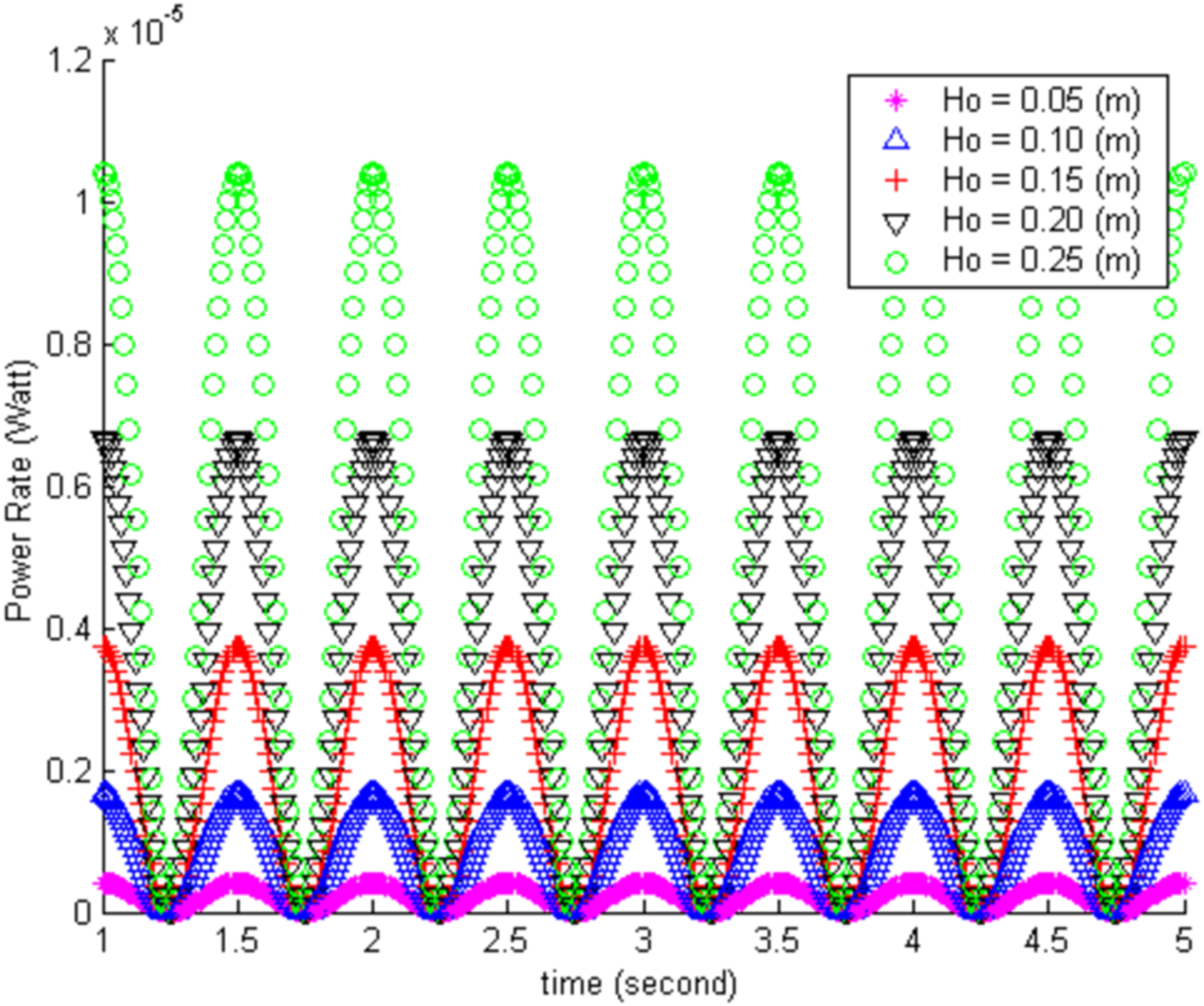
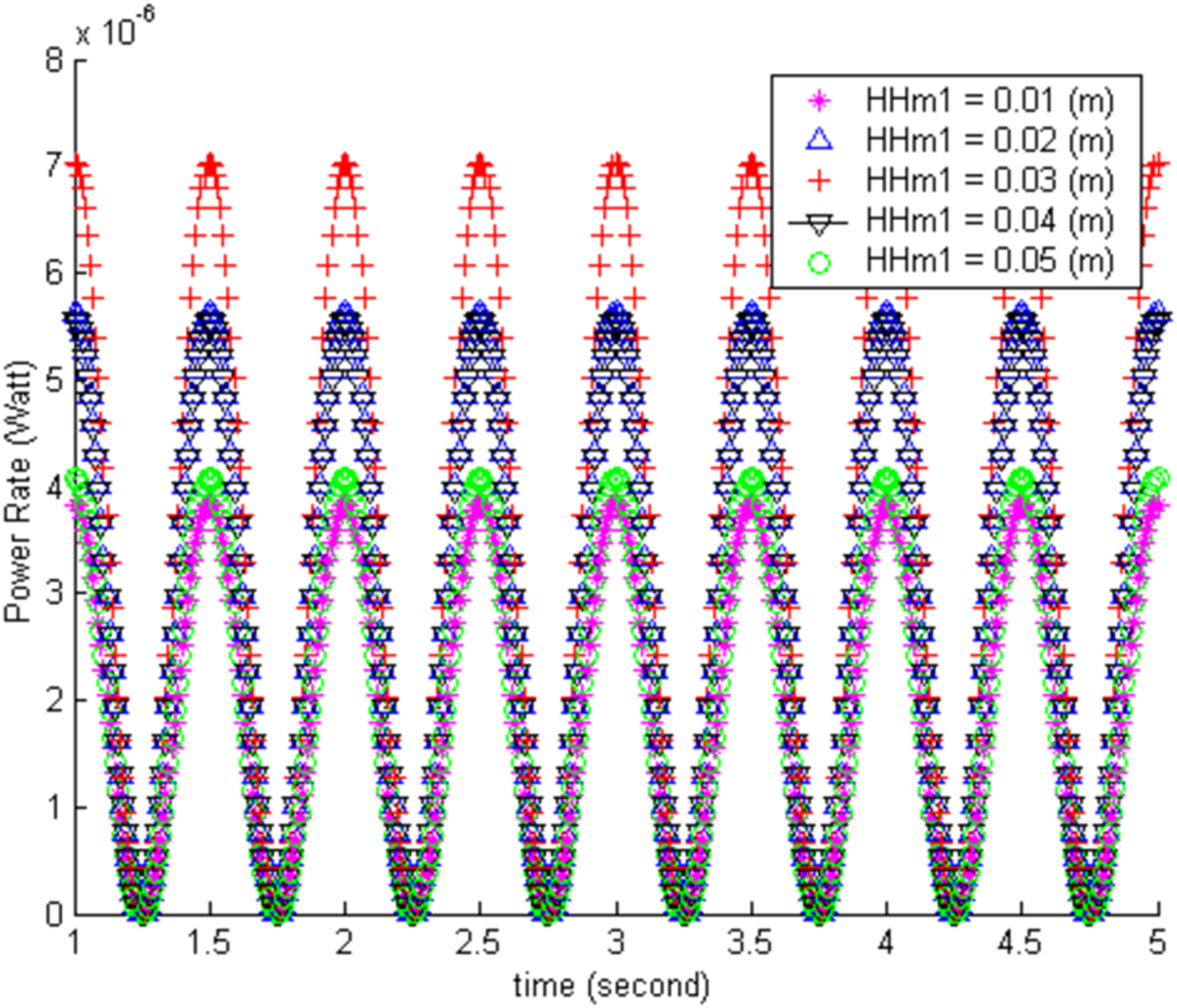
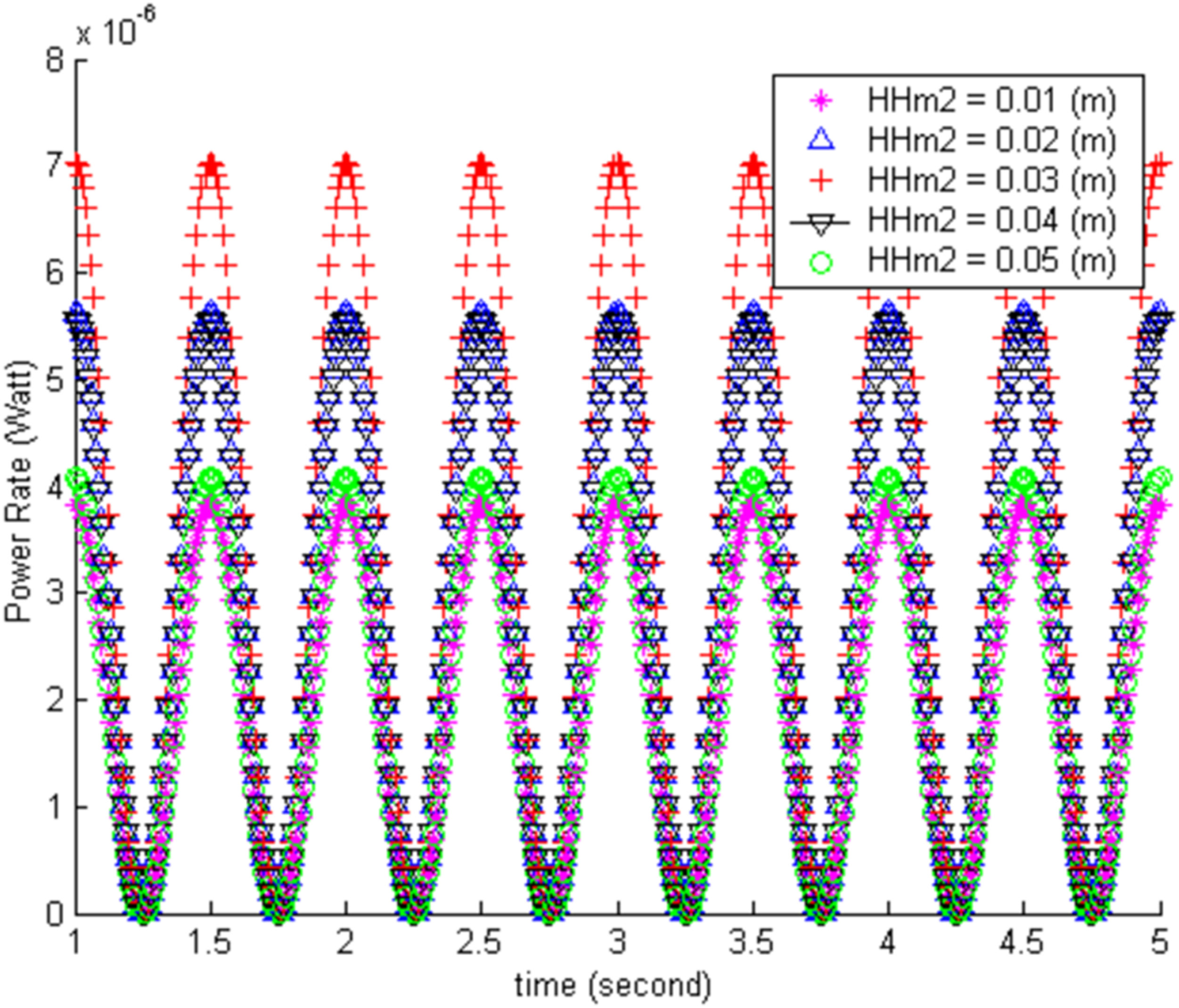
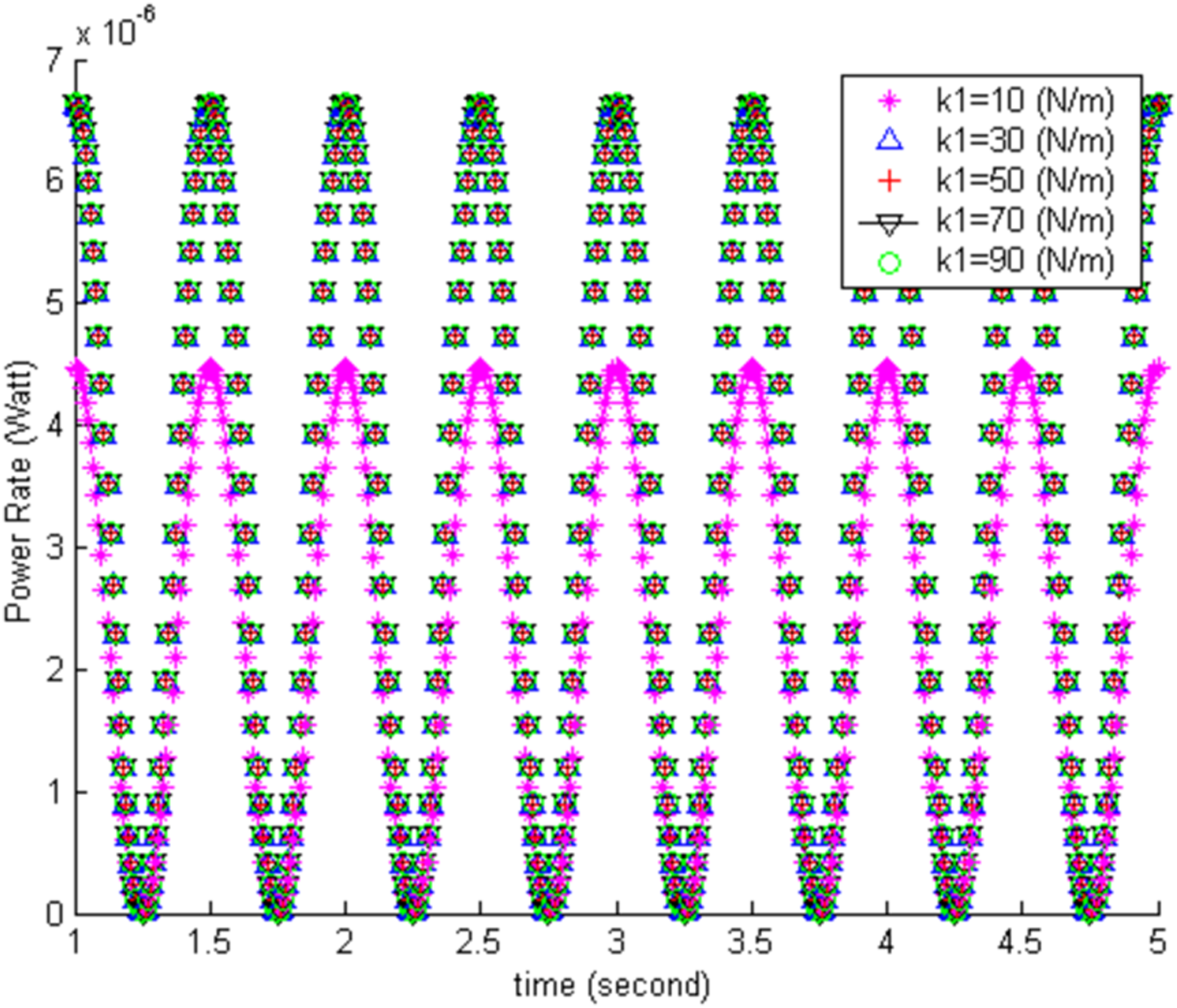
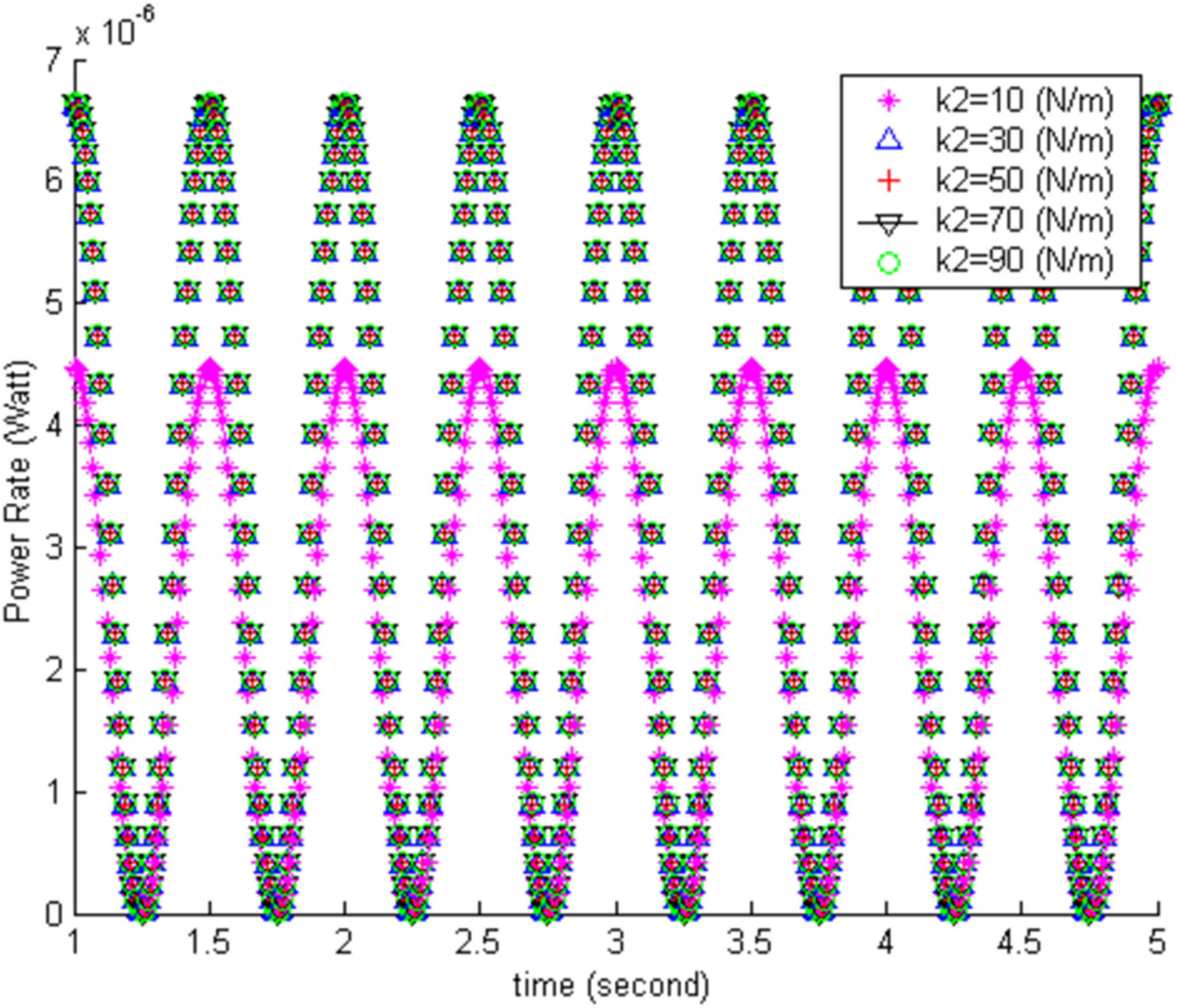
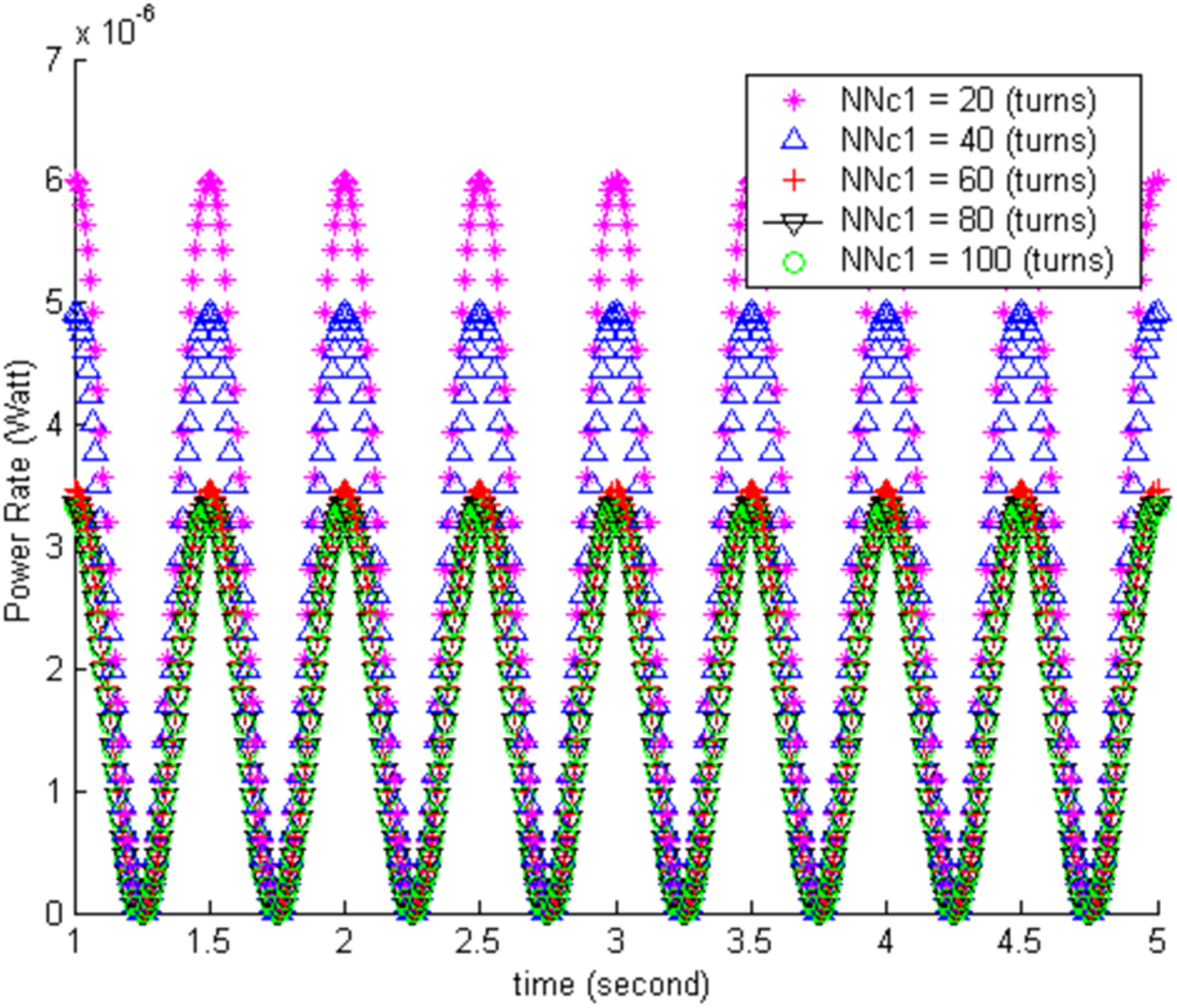
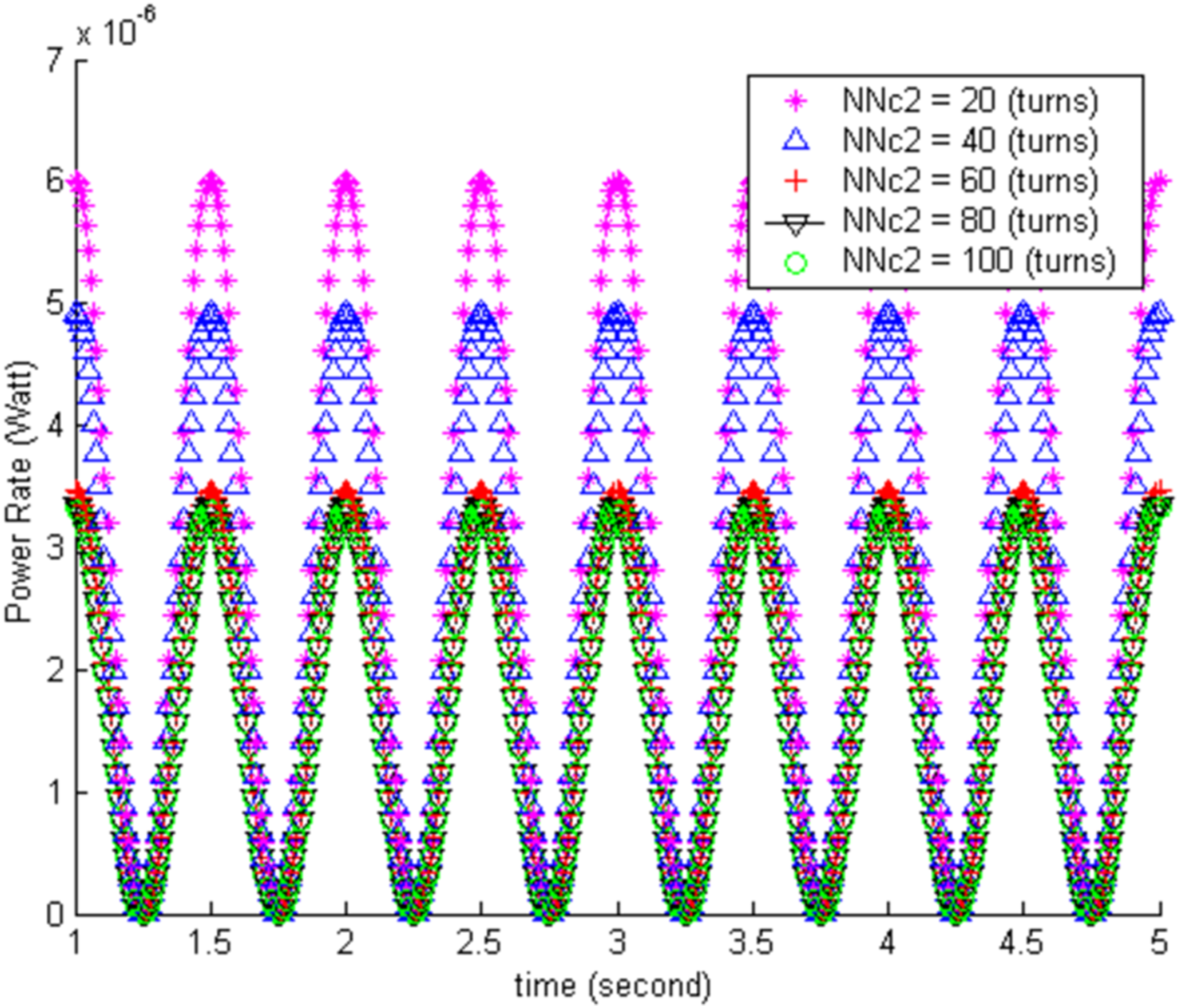
Moreover, it is observed from Figures 12 and 13 that the induced electrical power is strongly correlated with HHm1 and HHm2. Figures 14 and 15 show that k1 and k2 have a significant impact on the induced electrical power. Additionally, Figures 16 and 17 demonstrate that the number of coil turns NNC1 and NNC2 has a noticeable effect on the electrical power, although the trend of electrical power with different coil layers is fluctuating.
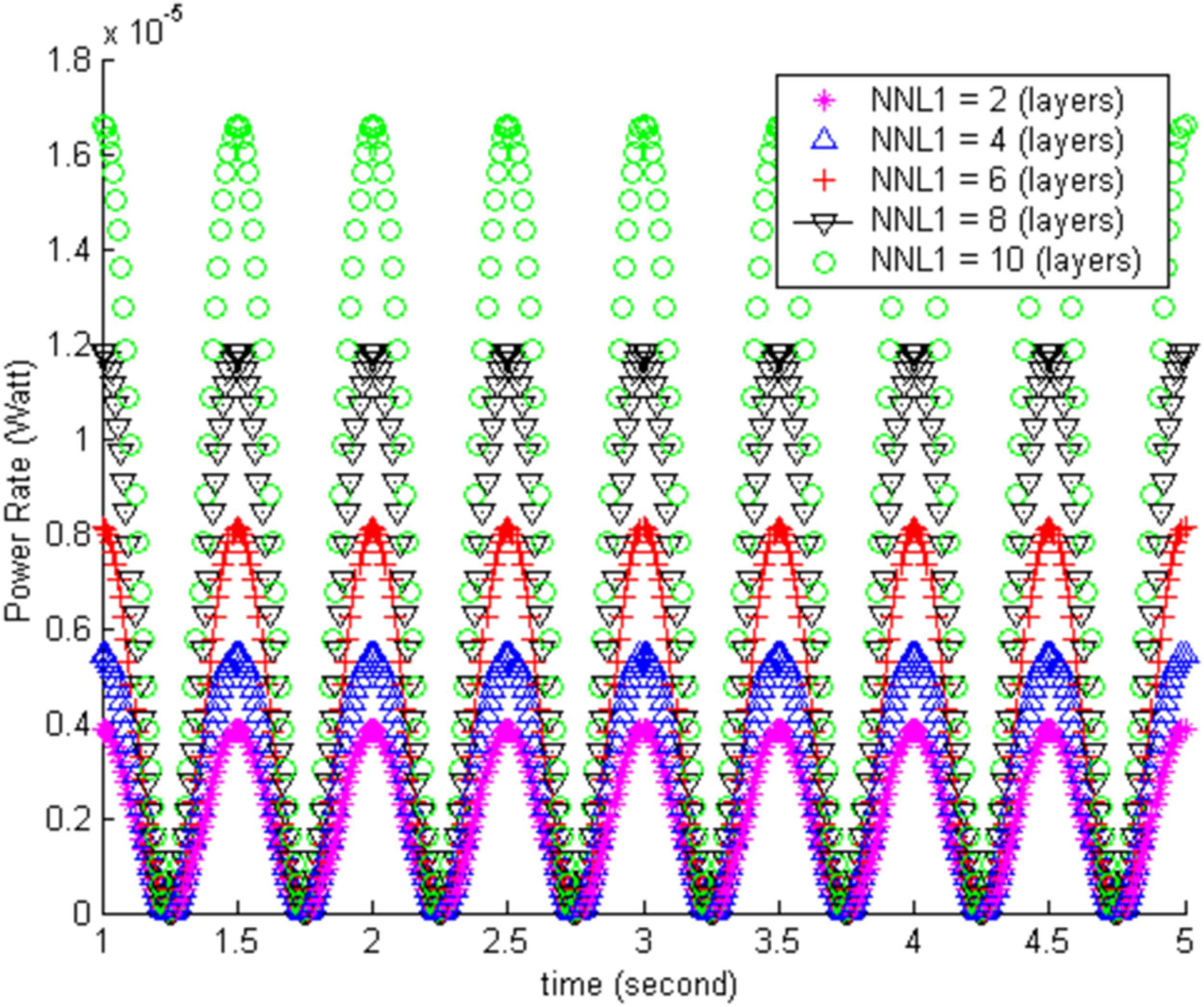
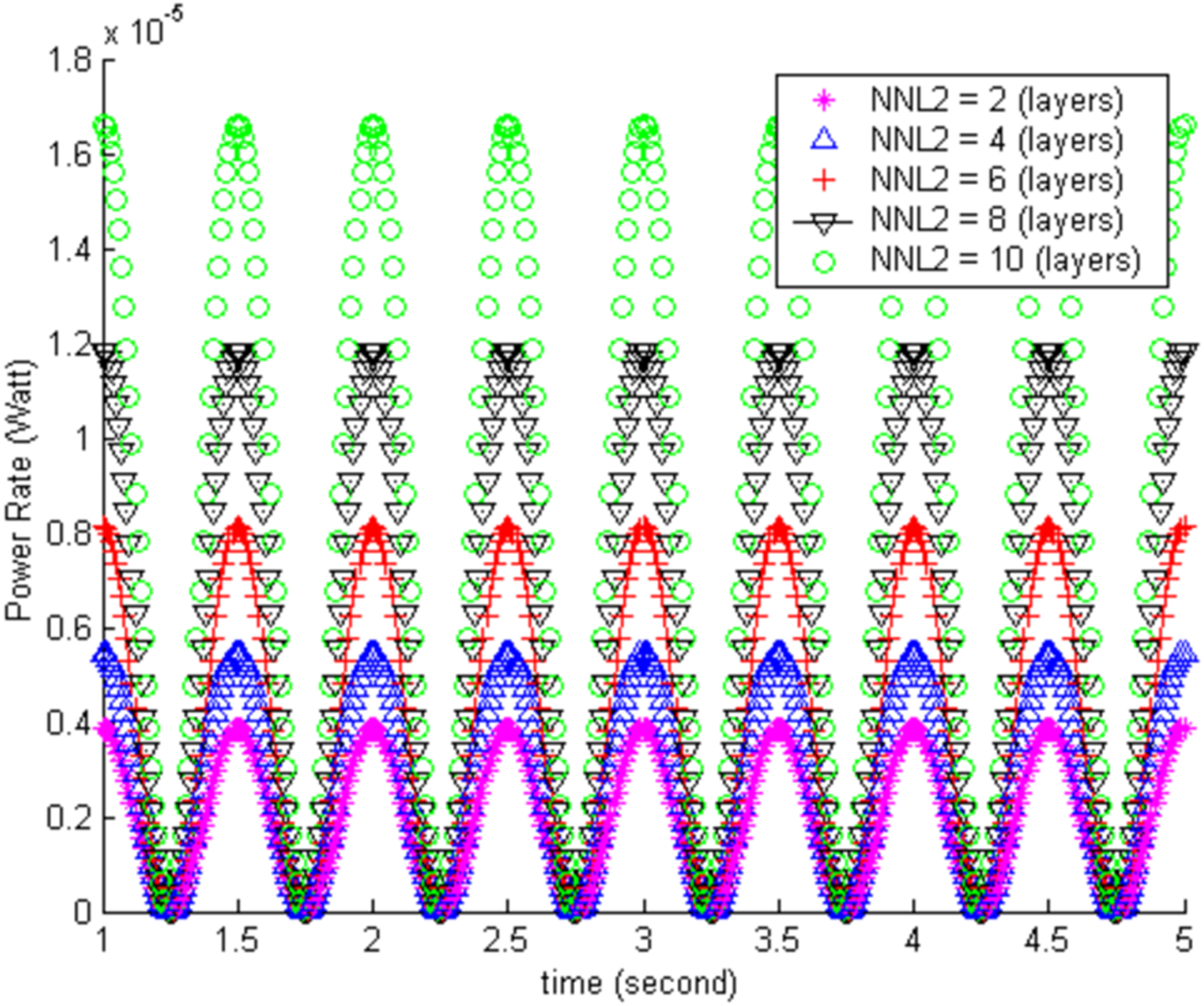
Finally, as shown in Figures 18–19, it is clear that the electrical power is positively proportional to the number of coil layers NNL1 and NNL2.
All parameters, including wave parameters (Ho, λ), and geometric parameters of the energy harvester (DDm1, HHm1, k1, NNC1, NNL1, DDm2, HHm2, k2, NNC2, NNL2), were analyzed in a sensitivity analysis to investigate their influence on the electrical power generated by the energy harvester. The results showed that all parameters play an essential role in determining the induced electrical power.
Case study
The ranges of the parameters for the two-magnet hanging energy harvester.

Cuckoo searching optimization
The CS (Cuckoo Search) algorithm is a well-known optimization algorithm used to solve optimization problems. 26 It was first introduced by Yang and Deb in 2009 27 and draws inspiration from the brooding parasitism behavior of cuckoo species in nature. Due to the aggressive breeding behavior of cuckoos and the characteristics of Lévy flights, the cuckoo search algorithm has been successfully applied in the numerical optimization field. Cuckoos have a reproductive strategy of obligate brood parasitism, which involves laying their eggs in the nests of other host birds, often of other species. Some species, such as the ani and Guira cuckoos, lay their eggs in public nests, sometimes removing other eggs to increase the hatching probability of their own eggs. 28 There are three types of brood parasitism: intraspecific brood parasitism, mutual breeding, and nest occupation. When the host bird discovers the alien eggs, it may either throw them away or abandon the nest and build a new one. Interestingly, the timing of egg-laying for some species of cuckoo birds is astonishing, as the cuckoo eggs often hatch a little earlier than the host’s eggs. When the first cuckoo chick hatches, its first instinct is to throw out the host eggs by blindly propelling them out of the nest. Furthermore, the cuckoo chick may also mimic the call of host chicks to gain more feeding opportunities.
In the simple Cuckoo Search algorithm, three idealized rules are adopted: 1. Each cuckoo lays one egg at a time, which is dumped in a randomly chosen nest. 2. The best nests with high-quality eggs are preserved for the next generations. 3. The number of host nests is preset, and the cuckoo egg will be discovered by the host bird with a probability pa ∈ [0, 1]. The host bird can either throw the egg away or abandon the nest and build a new one.
For simplicity, the fraction pa of the n nests is defined as the nests that are replaced by new nests with new random solutions. Assuming that each egg in a nest represents a solution and a cuckoo egg represents a new solution, the goal is to use the new solutions (cuckoos) that are potentially better to replace not-so-good solutions in the nests. In more complicated cases, each nest may contain multiple eggs, representing a set of solutions.
For a cuckoo i, a new generated solution x(t + 1) is obtained using a Lévy flight
Here, α (> 0) is the step size, typically set to 1.
Equation (15) is a stochastic equation for a random walk. A random walk is a Markov chain whose next status/location only depends on the current location 
The steps in the Cuckoo Search algorithm follow a random walk process with a heavy-tailed power-law step-length distribution. To speed up local search, some of the new solutions should be generated by performing a L´evy walk around the best solution obtained. However, a significant proportion of the new solutions should also be generated by randomization in the far field, with locations that are far enough from the current best solution to avoid getting trapped in a local optimum. Cuckoo Search is now widely used in engineering optimization, image processing, scheduling, planning, feature selection, forecasting, and more.
29
Figure 20 shows the block diagram of the Cuckoo Search method used in the energy harvesting optimization discussed in this study. The optimization process terminates when the maximal iteration reaches the maximum value of itermax. A flow chart of the Cuckoo Search Algorithm.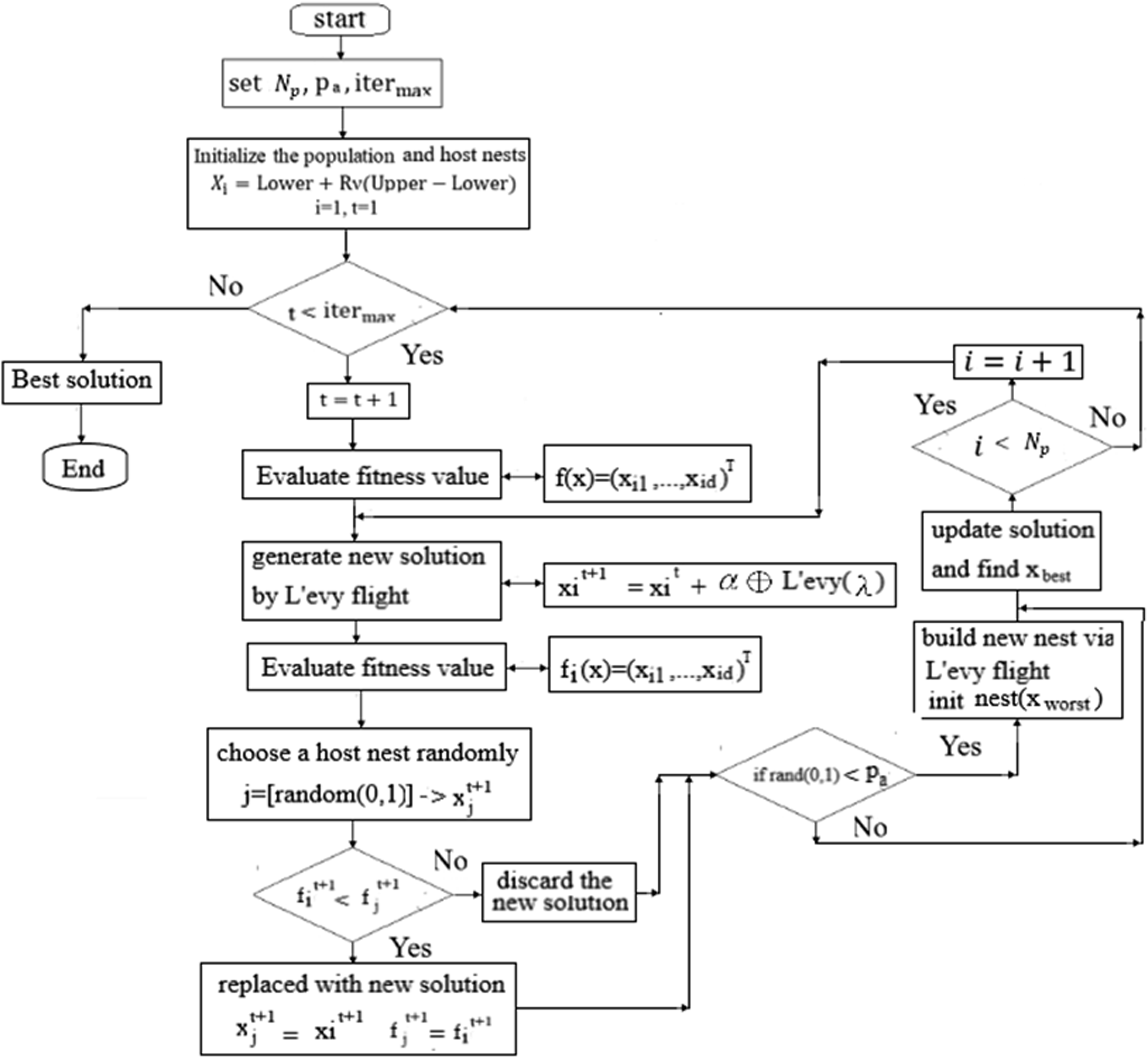
The optimal performance of the Cuckoo Search (CS) algorithm is influenced by its control parameters, namely, Np (population size), pa (discovery rate of alien eggs/solutions), and itermax (maximal iteration number). Therefore, selecting an appropriate set of control parameters is necessary to achieve the best possible outcome during the energy harvesting device optimization. In this study, the CS’s control parameters are varied step by step during the optimization process to reach better parameters. Section of sensitivity assessment showed that the induced electrical power of the energy harvester is affected by its geometric parameters, including DDm1, HHm1, k1, NNC1, NNL1, DDm2, HHm2, k2, NNC2, and NNL2. To optimize the ten design parameters using the CS algorithm, the wave characteristics are chosen as Usea = 2 (m/s), λ = 2.0 (m), and Ho = 0.2 (m), while the electrical resistances of the load attached to the two coil sets of the harvester, RRload1 and RRload2, are set to be 200 Ω. The objective function (OBJ) for optimizing the energy harvesting device using Cuckoo Search (CS) is defined as the root-mean-square of the induced electrical power output, which is a function of the ten design parameters
Setting α (the step size) to 1, in order to obtain the optimal design data, the CS control parameters (Np, pa,
Np = (10, 20, 30, 40, 50), pa = (0.15, 0.20, 0.25, 0.30, 0.35),
Results and discussion
Results
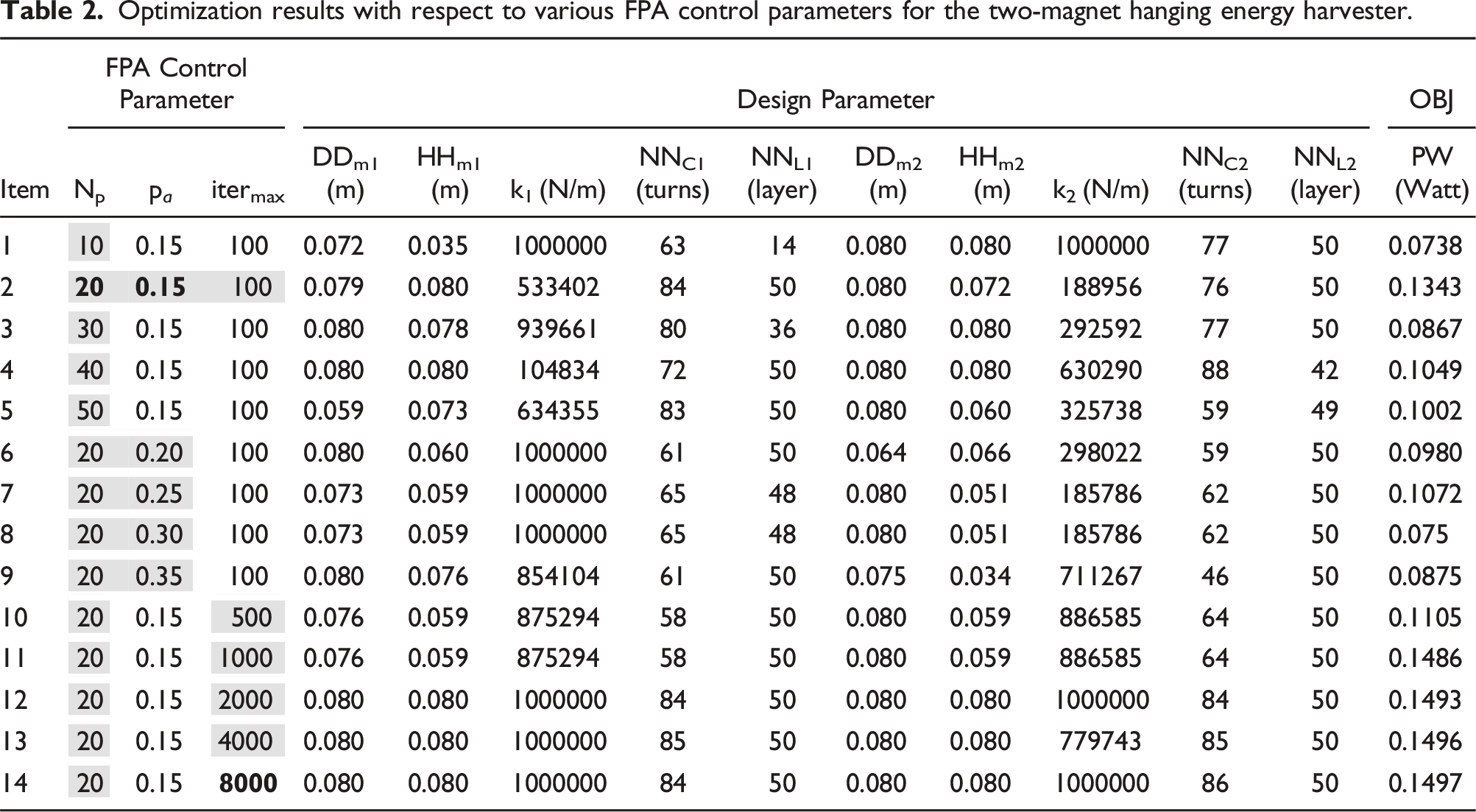
Optimization results with respect to various FPA control parameters for the two-magnet hanging energy harvester.
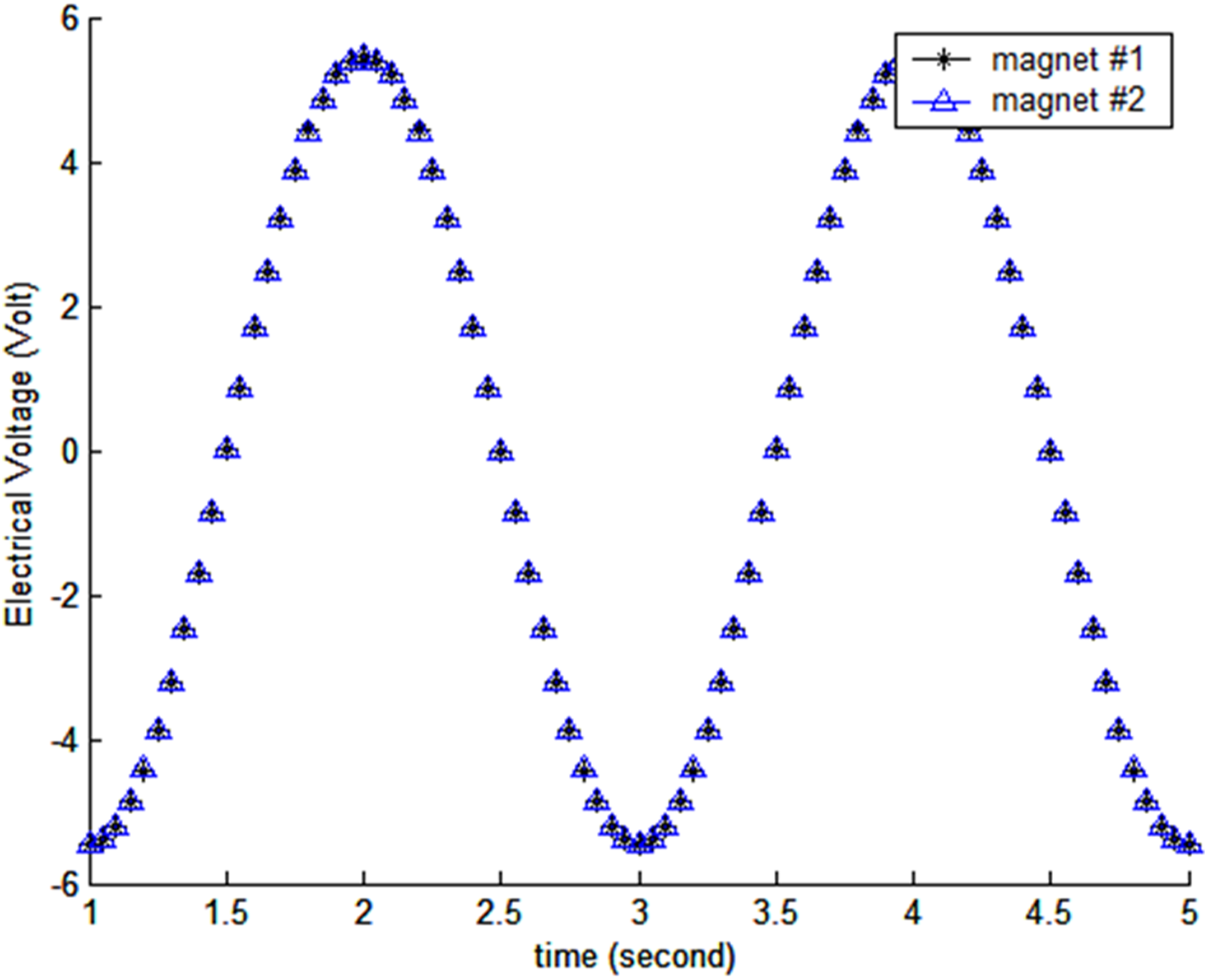
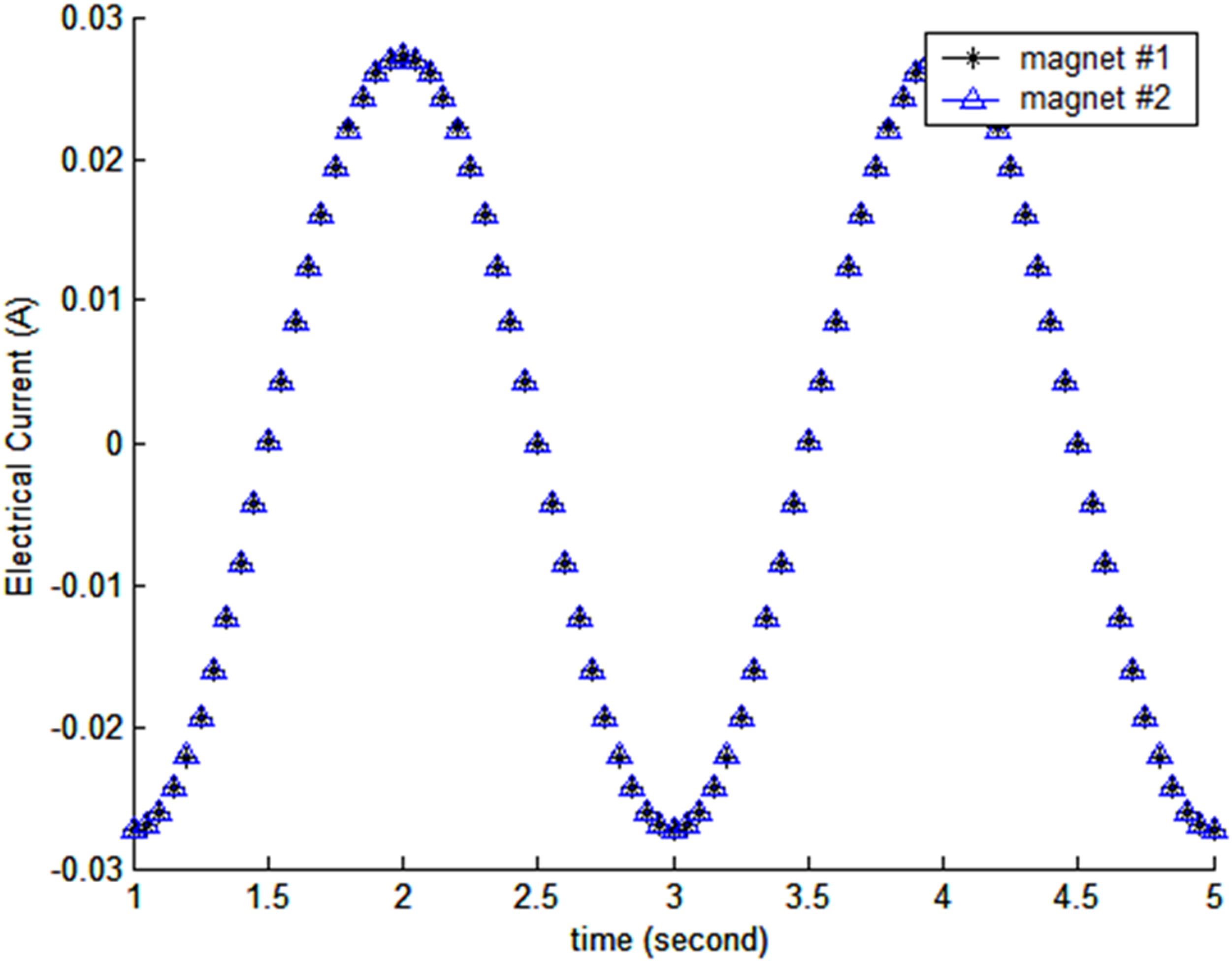
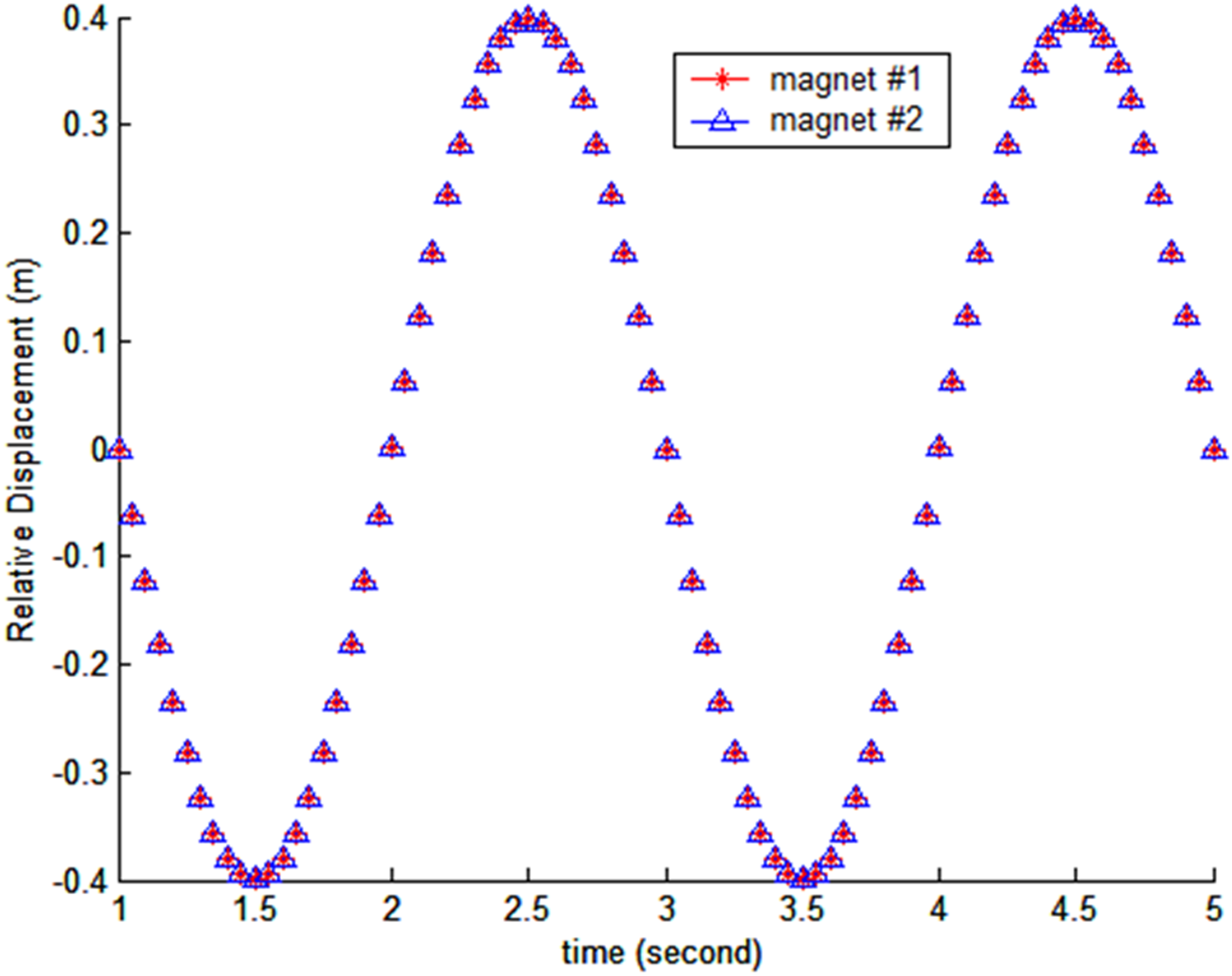
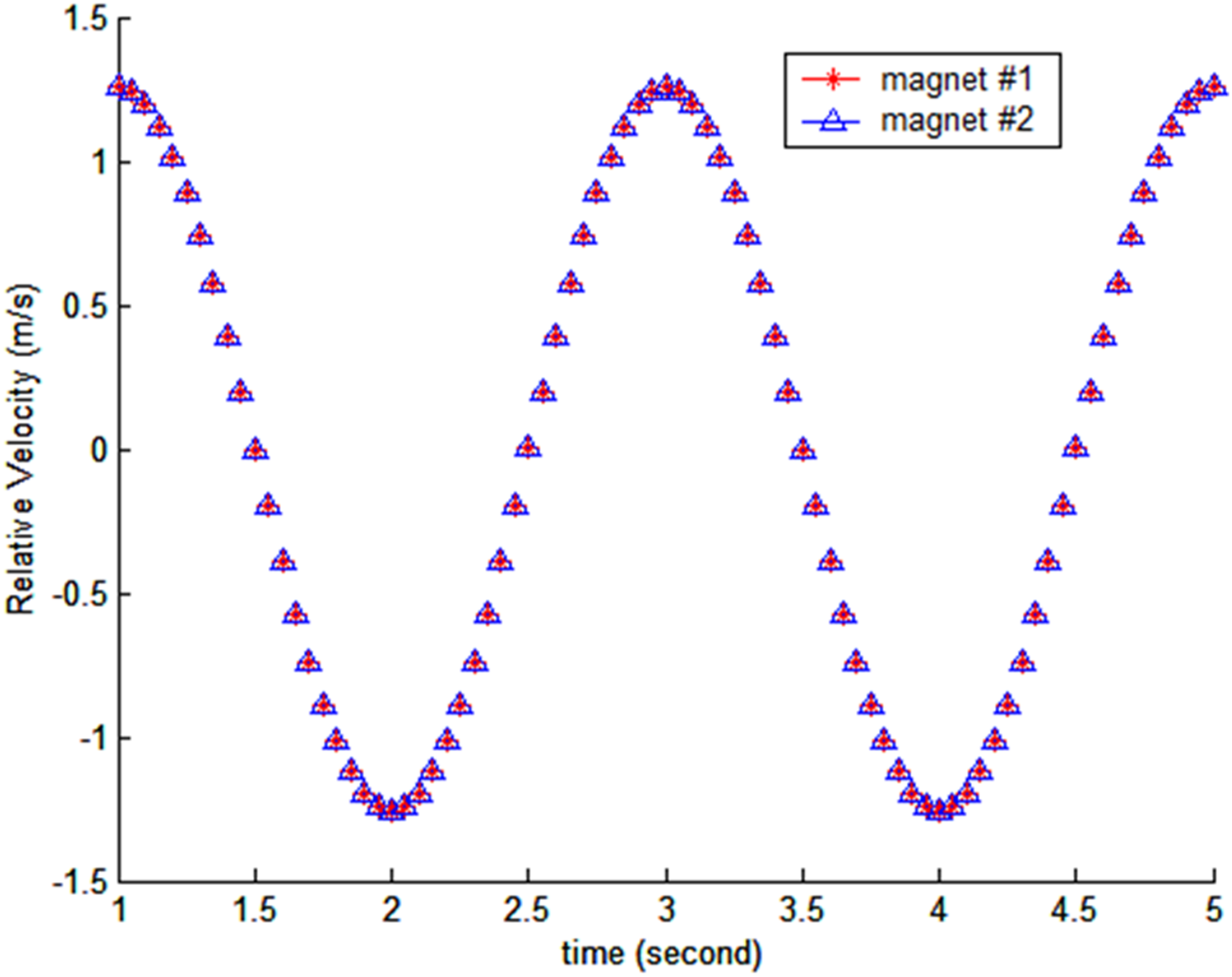
After obtaining the optimal design parameters using the CS optimizer, the theoretical electrical power with respect to time is calculated and plotted in Figure 21 by inputting these parameters into theoretical formulas equation (13). Additionally, the optimal values of the design parameters are utilized in equations (10a) and (10b) to obtain the corresponding response curves of induced electrical voltage and electrical current with respect to time, which are displayed in Figures 22 and 23, respectively. To visualize the relative mechanical motion of the magnets in relation to the top of the energy harvesting device, the relative displacement curves of magnet #1 and magnet #2 are calculated using equations (6) and (7) and shown in Figure 24. By differentiating equations (6) and (7), the relative velocity curves of magnet #1 and magnet #2 are obtained and plotted in Figure 25. The response of electrical power to time (after optimization of two-magnet energy harvester). The response of electrical voltage to time (after optimization of two-magnet energy harvester). The response of electrical current to time (after optimization of two-magnet energy harvester). The response of magnets’ relative displacement to time (after optimization of two-magnet energy harvester). The response of magnets’ relative velocity to time (after optimization of two-magnet energy harvester).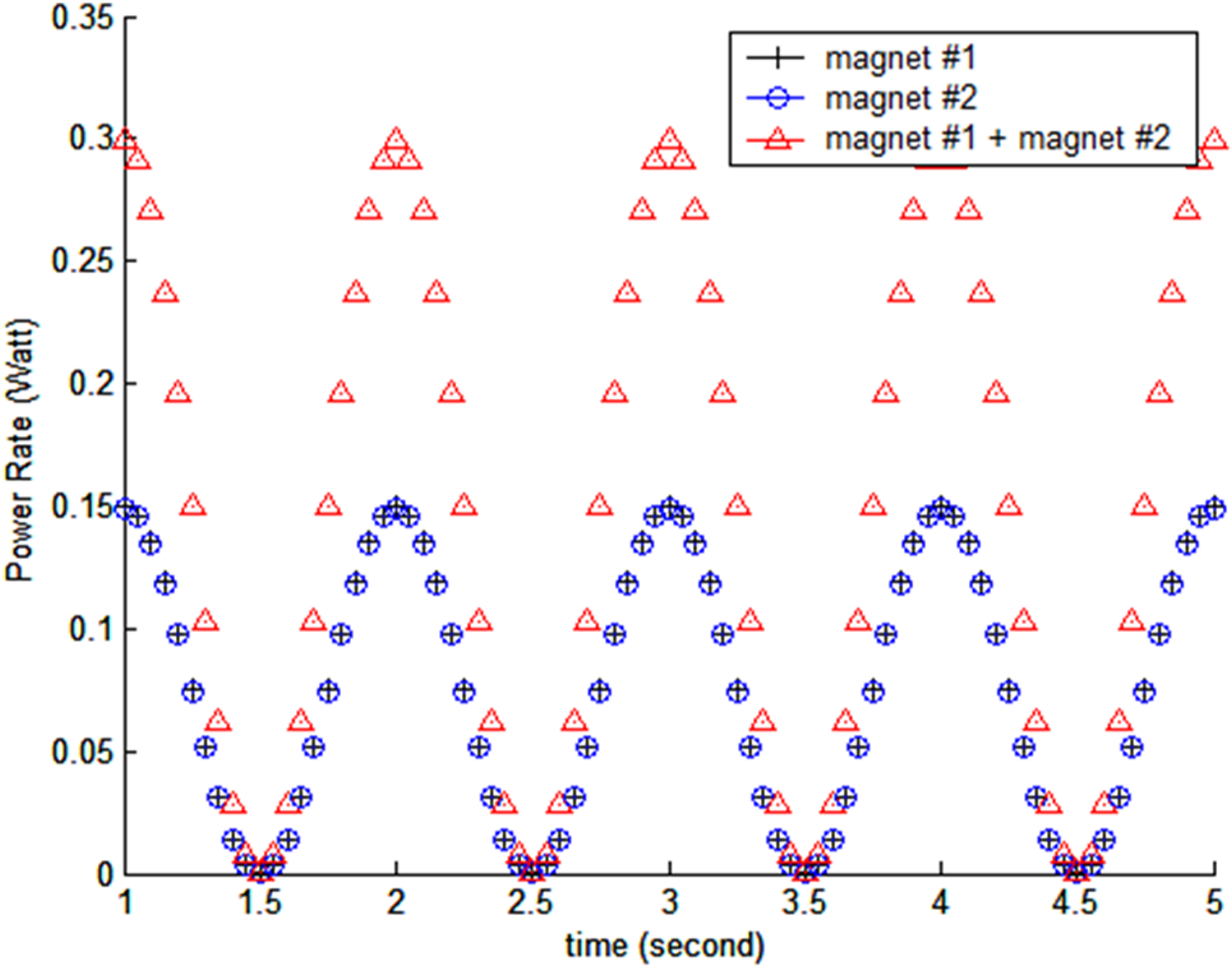
Discussion
Wave energy is a vast natural resource, and harnessing electrical energy from waves is a green and inexhaustible sustainable energy source. This study aims to design a safer and portable energy harvesting generator system that can be installed inside general ships to increase their electrical endurance. In Section 4, it was found that the induced electrical power of the KMC type two-magnet energy harvester is positively correlated with wave amplitude and inversely proportional to wave length, as shown in Figures 8 and 9. Figures 10 and 11 also demonstrated that the induced electrical power of the energy harvester increases with increasing DDm1 or DDm2. The magnets’ heights (HHm1, HHm2) were found to have a strong correlation with induced electrical power, as shown in Figures 12 and 13, and the spring constants (k1, k2) also significantly impact electrical power, as demonstrated in Figures 14 and 15. The coils’ turns (NNC1, NNC2) were found to affect electrical power in Figures 16 and 17, and the induced electrical power was found to be positively proportional to the coils’ layers (NNL1, NNL2) in Figures 18 and 19. Therefore, the geometric parameters (DDm1, HHm1, k1, NNC1, NNL1, DDm2, HHm2, k2, NNC2, and NNL2) of the hanging energy harvester are highly sensitive to induced electrical power and are considered design parameters for optimizing the energy harvester. The maximal root-mean-square electrical power occurred at the 14th set of optimal results, as shown in Table 2, when the CS controller (
Even though the induced electrical power is low, placing multiple sets of energy harvesting generator systems in these compartments can effectively increase the power generation output. Furthermore, there is a prevalent issue with the sustainable power supply for sensors deployed on the seabed, which is currently the most pressing concern. The purpose of the aforementioned seabed power generation facilities is also aimed at addressing this issue. To tackle this problem, we can establish a dedicated ship for wave power generation near the shore, with the energy harvesting generator system fully installed in the ship’s compartments. This setup can provide a large amount of electricity, which can then be transmitted through cables to power the seabed sensors.
Conclusion
To generate sustainable energy for deep sea sensors, a two-magnet energy harvester with two sets of coils was proposed and mounted on top of a ship’s cabin. By utilizing a spherical bearing and gravity effect, the energy harvester can remain in a vertical position despite the ship’s tilt caused by waves. Through the KMC mechanism and periodic wave motion, the magnetic flux variation induces electrical power. To optimize the energy harvester, a sensitivity analysis of marine parameters and geometric parameters was performed, and the objective function was set to maximize the root-mean-square electrical power. Using the CS optimizer, the optimal design resulted in a root-mean-square electrical power of 0.1497 (W), with electrical voltages induced by the two magnets of 5.5 (V) and electrical currents of the two coil sets of 0.028 (A). This study provides a straightforward approach to harvesting energy from the sea and optimizing energy harvesting with the CS optimizer.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors recognize the financial support of National Science and Technology Council (NSTC 112-2221-E-036-008, TW).
Data availability statement
Data generated or analyzed during this study are provided in full within the published article.