We present a novel 2D oscillator with an asymmetric design and investigate its stable vibration utilizing the Ms-DTM method. Initially, we obtain the equations of motion for the proposed system. Subsequently, by employing Taylor expansion of and , the derived nonlinear equations are transformed into linear ones, which we solve analytically using the eigenvalues-eigenfunctions technique. Additionally, we solve the obtained nonlinear system using the Ms-DTM method. Lastly, we examine the stability of the nonlinear system by visualizing the closed nature of the phase portrait.
Differential equations for nonlinear oscillators are used in many areas of science such as: Physics, Structures, and Engineering. The study of these equations is an important topic for researchers. Significant efforts have been made to study them in the literature, and a large number of techniques (analytical and numerical) have been introduced and used to solve such systems.1–3
Two key characteristics of nonlinear oscillators, which produce complex motion, are that motion becomes more significant as amplitude grows due to the nonlinearity, and in certain situations, the frequency will also change as amplitude changes. These kinds of nonlinear oscillators are common in the real world, and it’s important to remember that linked nonlinear oscillators are studied in a wide range of scientific fields, including biology and economics. The systems literature has been studied extensively.4–8 One notable example is the van der Pol oscillator, a nonlinearly damping oscillator that was first presented in the 1920s by Balthasar van der Pol (1889–1959). Since it is difficult to find an analytical solution for such nonlinear oscillators, researchers have turned to a variety of numerical techniques.9–12
In Reference 13, the researchers investigate the dynamic analysis of beam vibrations in the presence of a preload discontinuity. Additionally, they introduce a new and accurate equivalent function to effectively address this widely recognized nonlinearity. In another study Alborz14 deals with the analytical solutions of nonlinear oscillators under initial velocity, and by applying the law of conservation of energy transforms the initial state of the system into a state where the velocity of the oscillator is zero.
If the velocity of the oscillator is zero and is outside the origin of motion, we can determine the relationship between frequency and amplitude. The studies of oscillators remain the prime and classic example to understand many physical, chemical as well as biological systems. In fact, numerous systems associated with interacting/coupled oscillators have been used to describe the cooperative activities of several systems.15–21 The equation of motion of symmetric oscillator in two dimensions can be written as
The above equations can be rewritten with the force term as
Here, the forces can be expressed as and . However, if the forces are different from each other then the corresponding equation of motion can be written as
In the above equation, .
The equation of motion as states above would represent an asymmetric oscillator. In order to understand the asymmetric oscillator, one needs to study the variation of and jointly. It is worth mentioning here that the one may not find the exact analytical solution for some of these types of systems. However, one needs to use some approximation to find the partial analytical result. In other word, a graphical representation of versus or vice versa need not be circular in any case. It may be either prolate or oblate. Such systems may further be studied by combining the approximated analytical results with their numerical counterpart.
Description of the physical system
Consider asymmetric two-dimensional oscillator with the following Hamiltonian
Here for simplicity, we assumed that . In the above relation, are the usual classical positions and momentum variables.
The Lagrangain and Hamiltonian are related to each other as
On substituting equations (4a), (4b) into equation (3) and simplifying one gets
Finally, the equations of motion (EOM’s) can be derived from equation (5) using the following formula . So, for , respectively, we obtained the following two EOM’s
Analytical solution of the model
Consider the following two equations
These two equations are non-linear due to the presence of ( and .
But the expansions of them are
Substituting equations (10) and (11) into equations (8) and (9) and keeping only terms up to power , we get
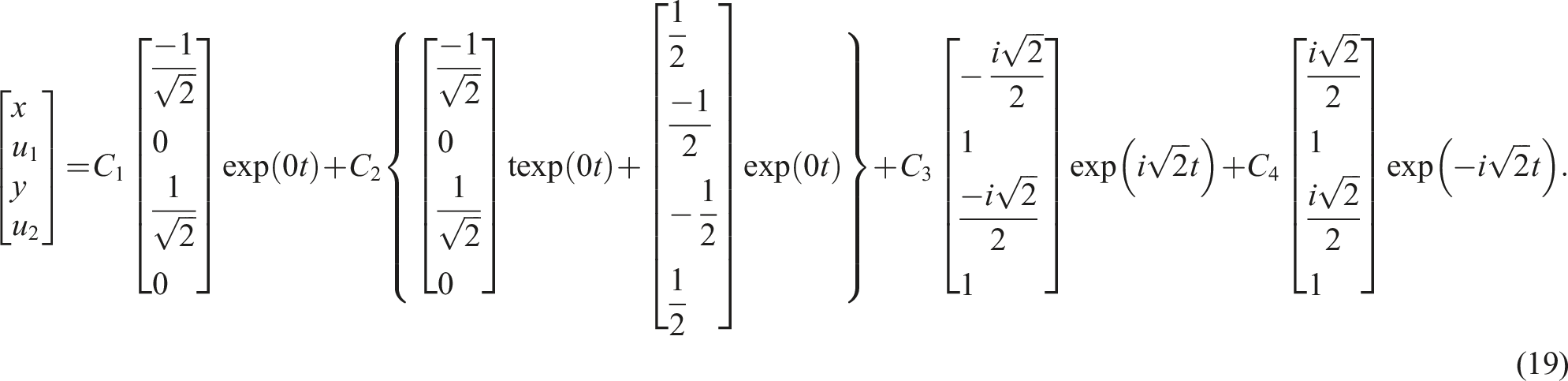
where equations (12) and (13) are linear and can be solved analytically as follows:
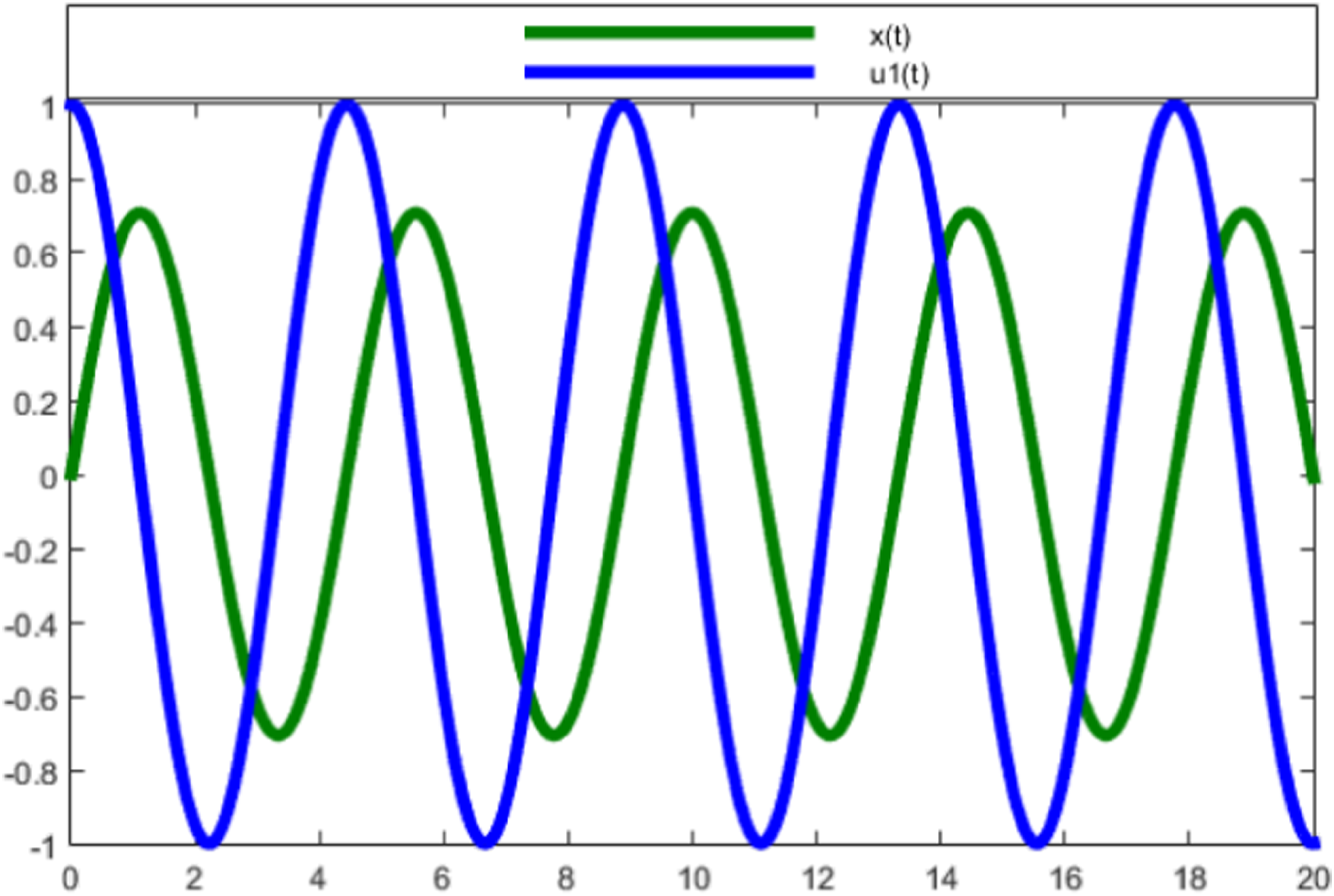
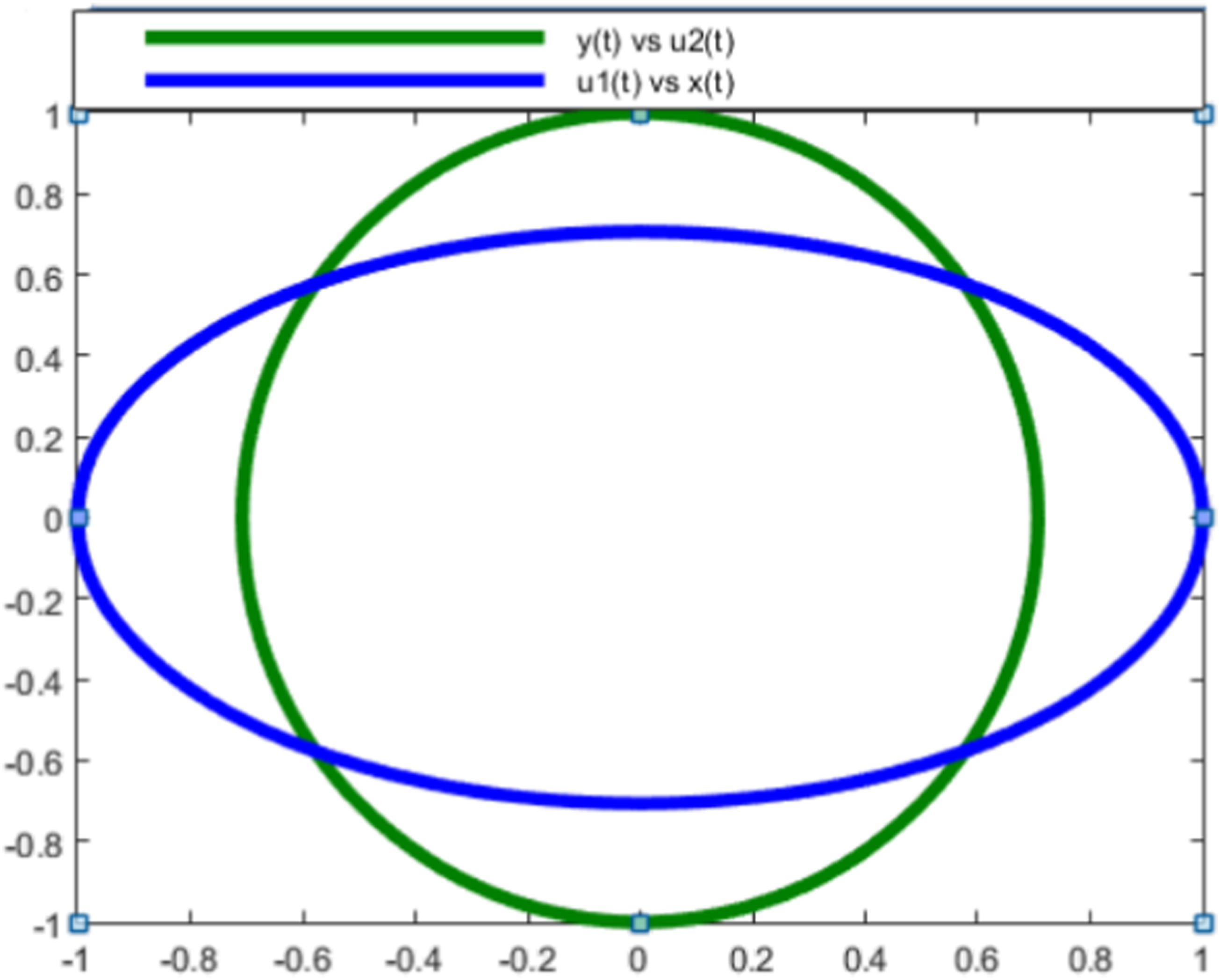
In Figure 1, we simulate both the position and the velocity against time, respectively, while the phase plots are shown in Figure 2 for both .
Simulation of analytical solution of the system equations (21) and (22) versus time.
Simulation of analytical phase portrait of the system equations (21) and (24).
Solution of the system via Ms-DTM
In this section, we aimed to solve the EOM’s given in equations (6) and (7). These equations are nonlinear second order equations and they can’t be solved analytically. One of the semi-analytical methods that can be used to solve them is the Multi- Step Differential Transformation Method (Ms- DTM).
The Ms- DTM
This section is reserved for the Ms-DTM for obtaining the numerical solution of DEs. For this purpose, we consider the following nonlinear initial value problem
Let’s assume that we want to find the solution of the problem equation (25) on a given interval.
In the real applications, the approximate solution of the problem equation (25) via the DTM can be expressed by the following finite series
The multi-step approach considers the establishment of the approximate solution by a different point of view. Suppose that the interval is divided into subintervals of equal step size where . The basic steps of the DTM are as follows.
First, over the first interval using the initial conditions the DTM is applied to equation (25), thus the following approximate solution is obtained
For and at each subinterval , the initial conditions are used and then the DTM is applied to equation (25) over the interval , where is altered with .
The operation is repeated again and again and for the solution of a sequence of approximate solutions is generated as follows
where . In actual fact, the Ms- DTM suggests the following solution
The Ms- DTM has a computationally simple performance for every desired value of . If the step size equals to , then it is easily observed this approach reduces to the classical DTM.
In the next section, the principal advantage of the above algorithm is that the obtained series solution converges for wide range of time is to be seen.
Simulation results and discussion
In this section, the equations of motion of the two-dimensional oscillator given in equations (6) and (7) are solved by an efficient, fast, and high accurate method, namely the multi-step differential transform method. The simulation results for the system given in equations (6) and (7) are presented for and .
Now let us consider the conditions . In view of the multi-step differential transform method, given in the previous section, and by using differential transform formulas and applying the differential transform to equations (6) and (7), we obtain
or
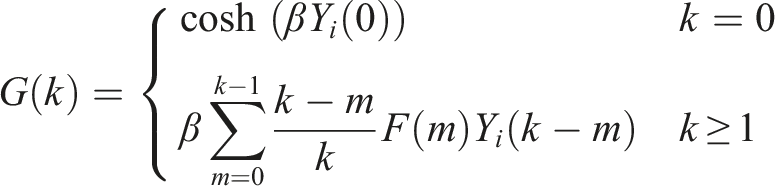
where and are the differential transformations of , , and , respectively. It is known that and are defined as
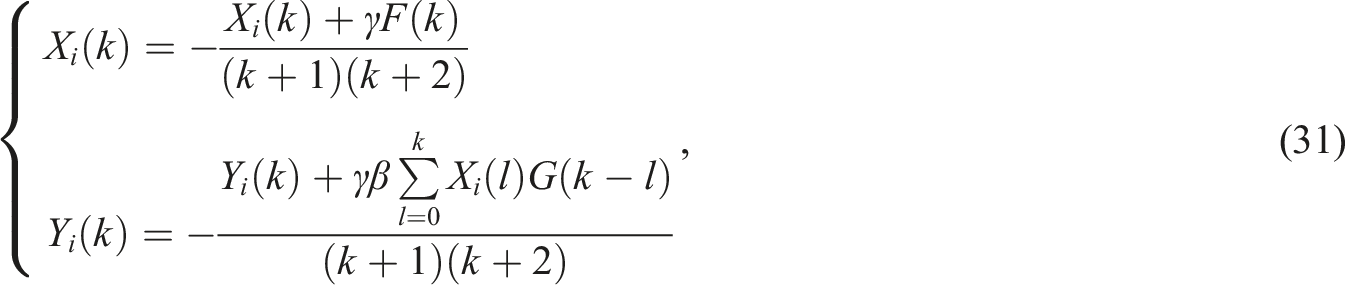
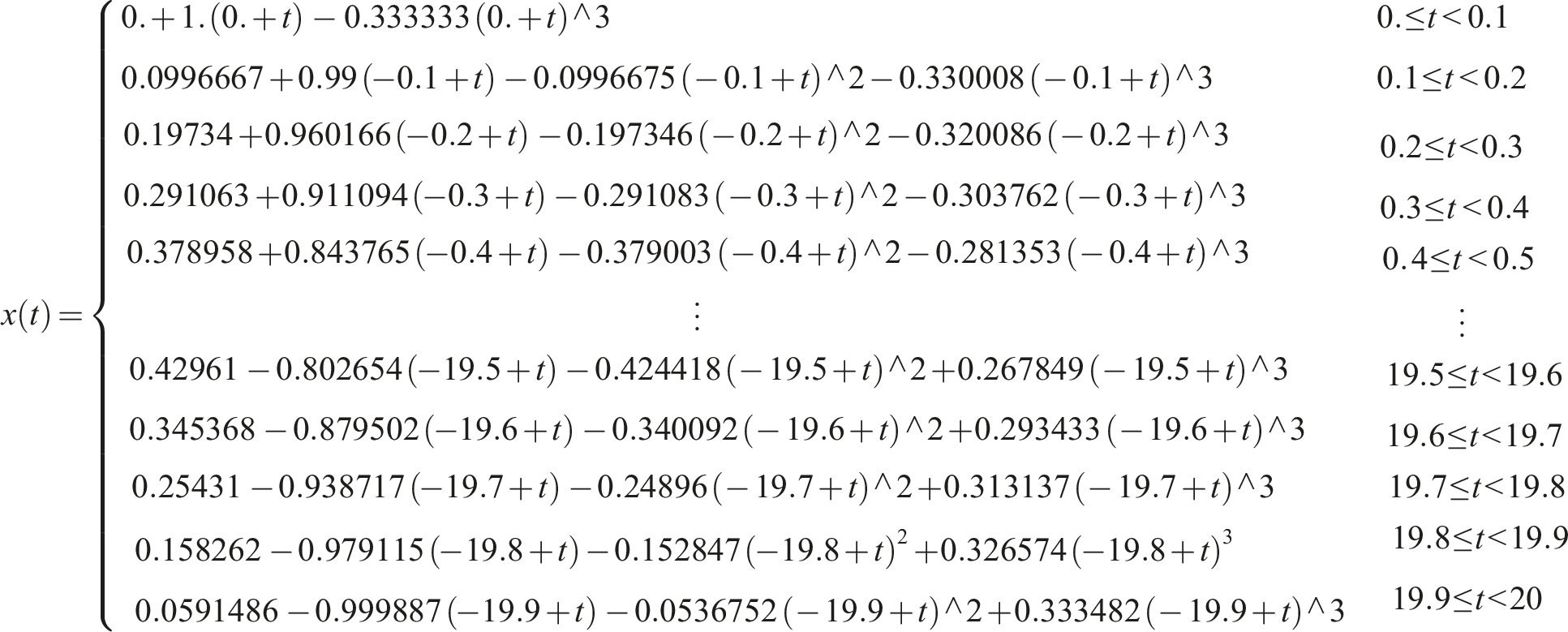
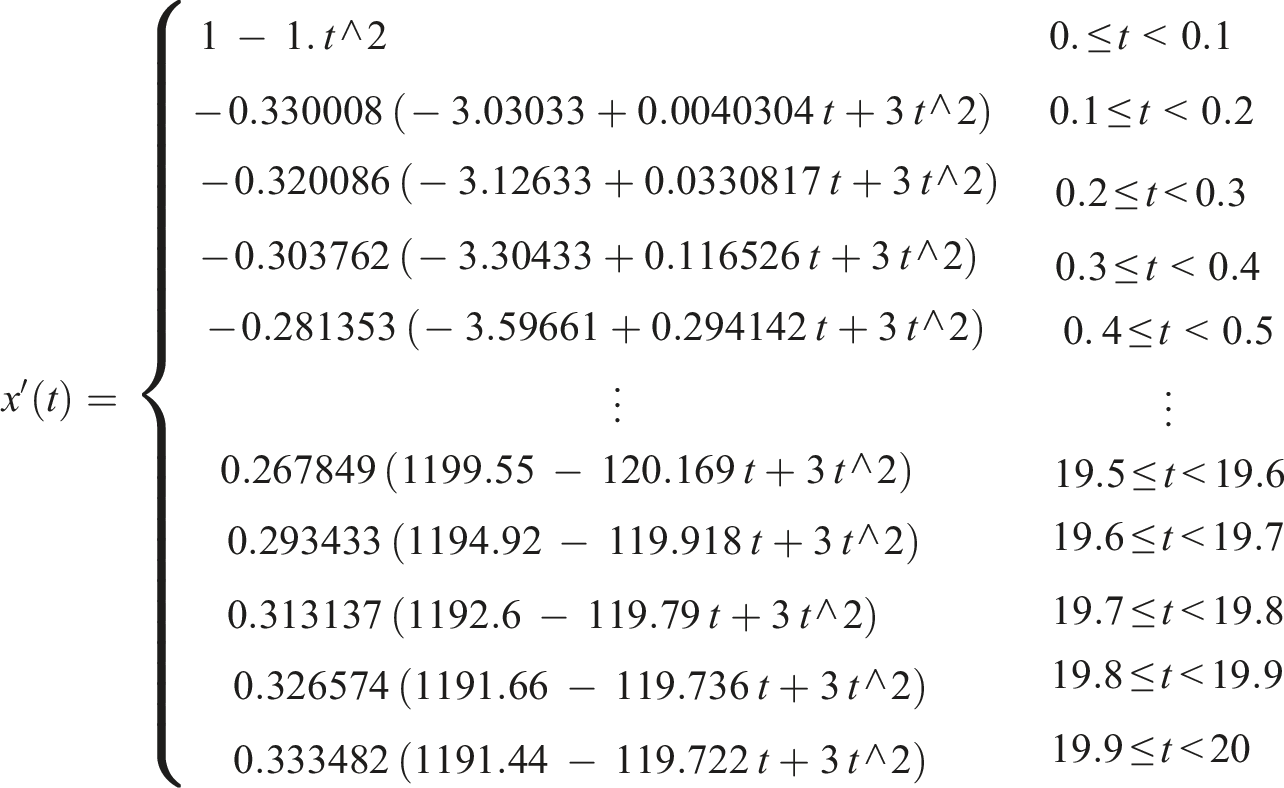
After solving equation (31) and using the equation (32) the solution for the system given in equations (6) and (7) can be obtained for any each time step. For this case, the following initial conditions were considered: and . Thus, we obtain the following solutions for the time step 0.1. It should be note that the solutions for and in other intervals are not given here because they would take up too much space.
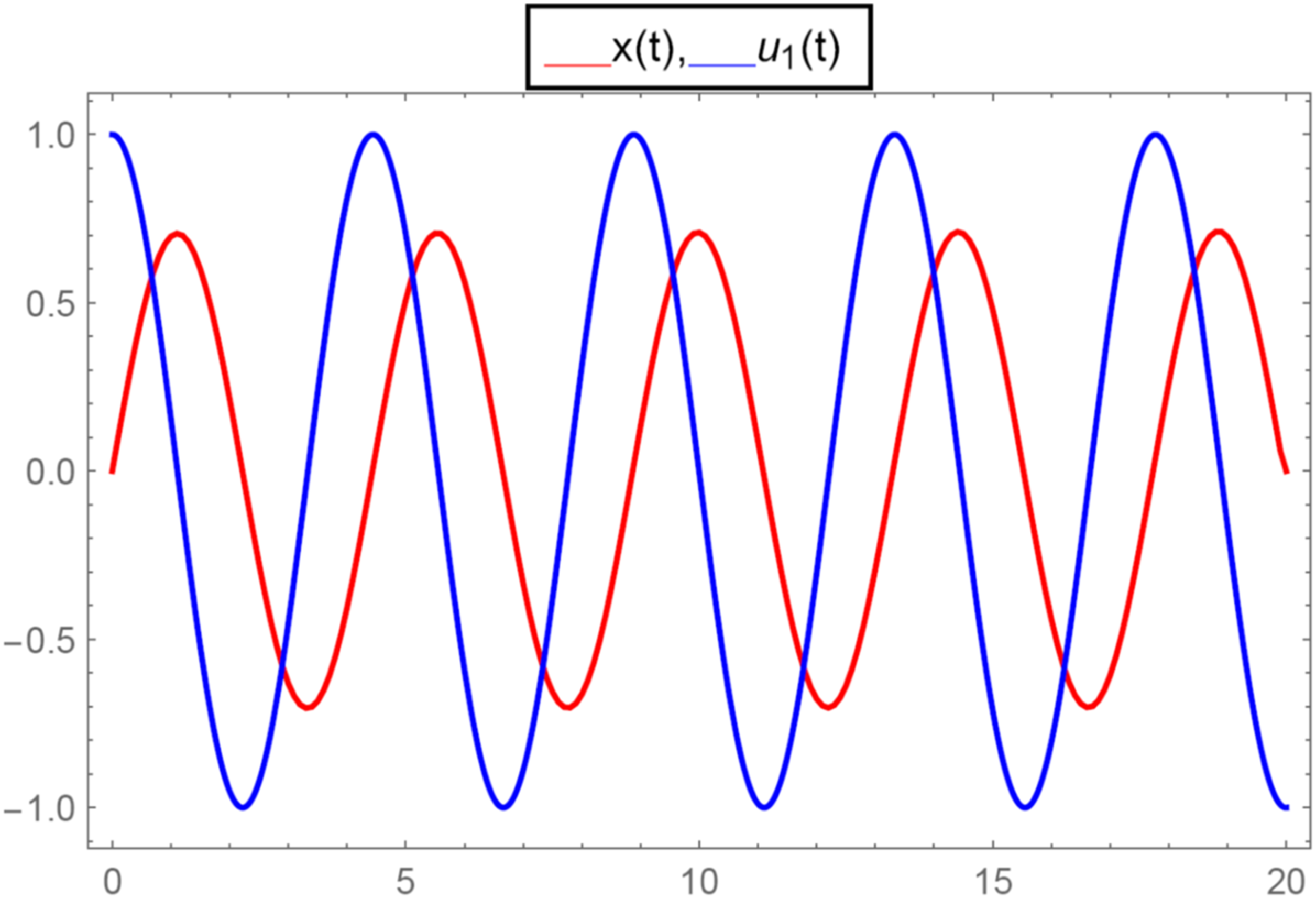
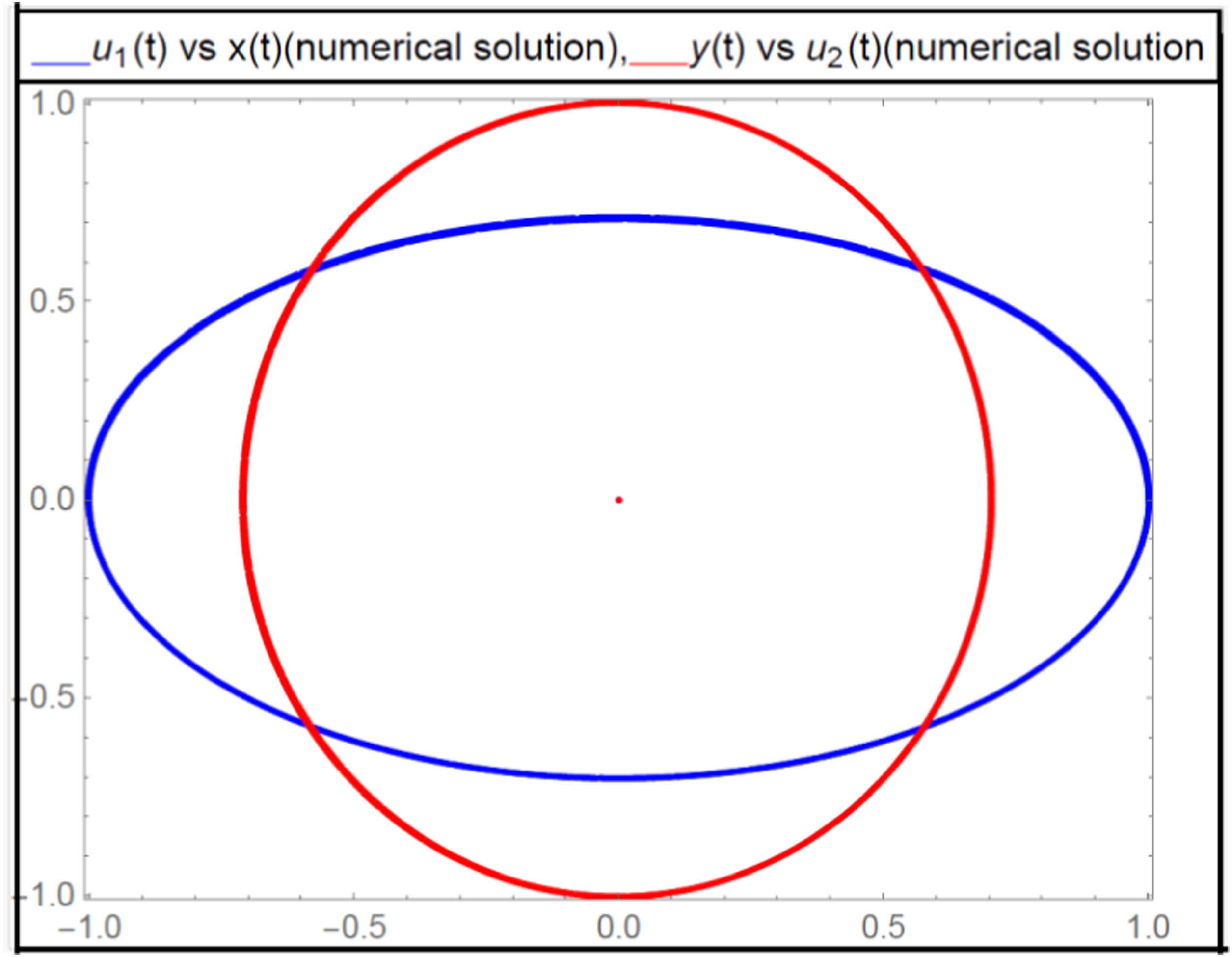
The behavior of and x'(t) against time are presented with and in Figure 3, while the phase plots are shown in Figure 4.
Simulation of Ms- DTM results for both position and velocity versus time.
Simulation of Ms- DTM results for phase portrait for versus and versus .
Our results presented in Figures 1–4 show that Ms- DTM method used gives an excellent agreement with the analytical technique used.
Furthermore, the proposed model Hamiltonian can be considered as Hermitian as well as PT invariant satisfying the condition
Here stands for the Parity operator and stands for the time reversal operator satisfying the relations
In this analogy intection term can be written as
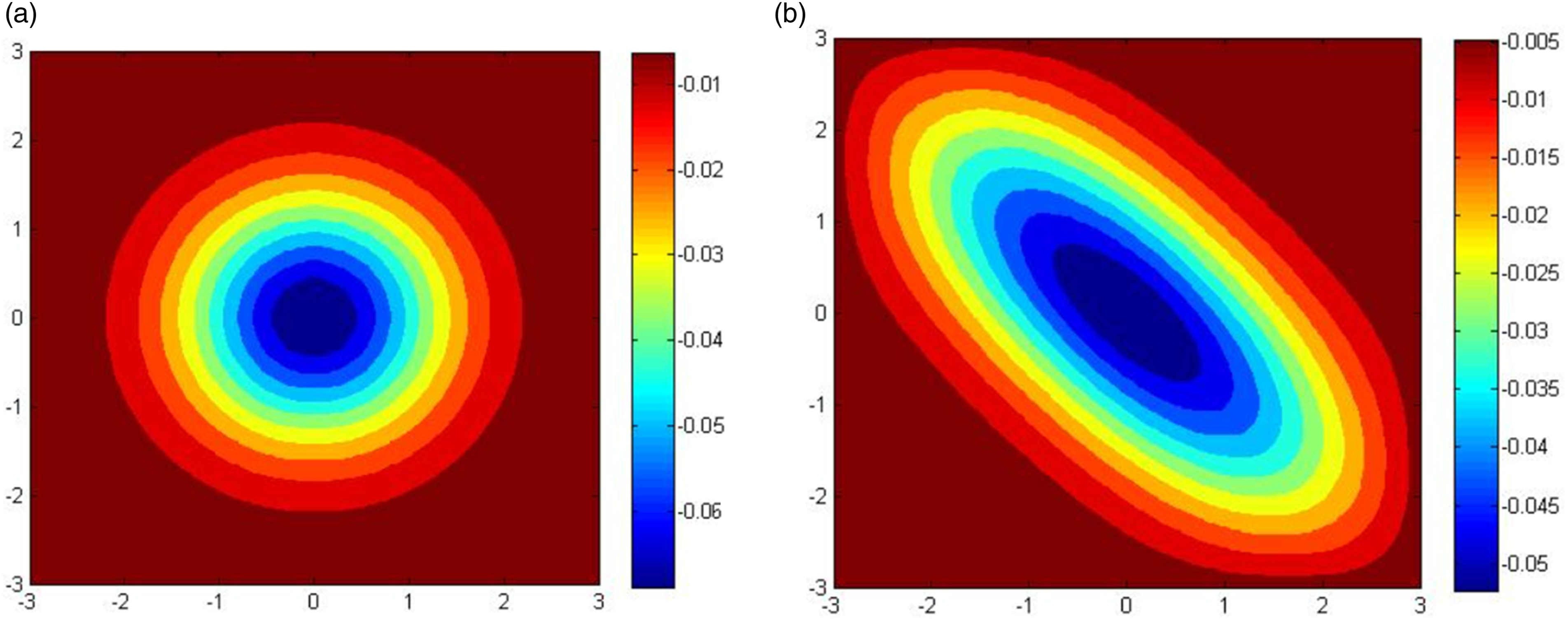
Further, it is easy to see that probability function reflects asymmetric nature. In Figures 5(a) and (b), we present probability function with and without interaction term.23
Probability function (a) without and (b) with interaction term.
Conclusion
In this study, a two-dimensional asymmetric system has been considered. The equations of motion of the system were derived and solved analytically and using Ms- DTM method. We have noticed that the nonlinear equations of motion (i.e., equations (6) and (7)) can be transferred to a linear system as equations (12) and (13) by using Taylor expansion presented in equations (10) and (11). The linear system given in equations (12) and (13) can be solved analytically using the eigenvalues-eigenfunctions technique. In addition, the system given in equations (6) and (7) has been solved using the matrix method known as Ms-DTM. Finally, simulation results have been given in Figures 1–4.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Jihad Asad
References
1.
Tellı˙SKopmazO. Free vibrations of a mass grounded by linear and non-linear springs in series. J Sound Vib2006; 289(4-5): 689–710.
2.
DimarogonasAD. Haddad vibration for engineers. Englewood Cliffs, NJ: Prentice-Hall, 1992.
3.
AhmadianMTMojahediMMoeenfardH. Free vibration analysis of a nonlinear beam using homotopy and modified Lindstedt-Poincaré methods. J Solid Mech2009; 1: 29–36.
4.
HemingwayEBakerC. Ernest hemingway selected letters 1917- 1961. New York, NY: Scribner Classics, 2003.
SedighiHMShiraziKHRezaA, et al.Accurate modeling of preload discontinuity in the analytical approach of the nonlinear free vibration of beams. J Mech Eng Sci2012; 1–11.
14.
AlborzM. A simple approach for dealing with autonomous conservative oscillator under initial velocity. J Appl Comput Mech2022; 8: 3.
15.
WinfreeAT. The geometry of biological time. New York, NY: Springer, 1990.
16.
KuramotoY. Chemical oscillations, waves, and turbulence. Berlin: Springer, 1984.
17.
ErmentroutGBKleinfeldD. Traveling electrical waves in cortex: insights from phase dynamics and speculation on a computational role. Neuron2001; 29: 33–44.
18.
StrogatzSH. From Kuramoto to Crawford: exploring the onset of synchronization in populations of coupled oscillators. Physica D2000; 143: 1–20.
19.
KimP-JKoT-WJeongH, et al.Pattern formation in a two-dimensional array of oscillators with phase-shifted coupling. Phys Rev E2004; 70(R): 065201.
20.
AnishchenkoVAstakhovSVadivasovaT. Phase dynamics of two coupled oscillators under external periodic force. Europhys Lett2009; 86: 30003.
21.
ErturkVSAsadJJarrarR, et al.The kinematics behaviour of coupled pendulum using differential transformation method. Results Phys2021; 26: 104325.
22.
ChangSHChangIL. A new algorithm for calculating one-dimensional differential transform of nonlinear functions. Appl Math Comput2008; 195(2): 799–808.
23.
RathB. Real spectra in some negative potentials: linear and nonlinear one-dimensional PT-invariant quantum systems. Eur Phys J Plus2021; 136: 493.