
Abstract
This paper presents a novel hybrid algorithm based on CMOGWO-ADNSGA-II to solve the vibration stability problem during the operation of a EMS-type maglev train dynamics model subjected to strong non-linear magnetic buoyancy. The proposed algorithm optimizes the control system parameters of EMS-type maglev train suspensions by combining an improved multi-objective chaotic grey wolf algorithm (CMOGWO) with an improved non-dominated Sorting genetic algorithm-II (ADNSGA-II) to enhance the search capability of the algorithm and ensure population diversity. The efficacy of the algorithm is demonstrated by applying it to the EMS-type maglev train suspension frame control system to find the optimal control parameters. Experimental results show that the system with the optimal parameters applied significantly reduces the suspension gap amplitude and the corresponding standard deviation, as well as the vertical acceleration amplitude and the corresponding standard deviation during operation. The proposed algorithm provides a good solution for EMS-type maglev train suspension vibration control, which can improve its performance and safety.
Keywords
Introduction
Nowadays, in public transportation, high-speed maglev trains benefit from their non-contact characteristics between the car body and the track during operation, achieving a low noise effect while reducing component losses. In order to provide efficient public transport in metropolitan areas, urban transport maglev using EMS technology (electromagnetic suspension) is currently being developed in many countries as an alternative to transport systems, and the operation of maglev trains has now become a research hotspot in the field of rail transport.1–4 In order to ensure the normal operation of the train, the bottom two sides of the EMS maglev train suspension extend downward and then fold inward, and ring the two guide rails from the outside. The attraction between the levitation core electromagnet and the ferromagnetic rails is used to maintain the levitation stability so that the carriages can be suspended in the air.5–7 The magnetic levitation control system is the core part of the maglev train, and its dynamic performance determines the comfort and safety of the train system because it is controlled by strong non-linear electromagnetic forces, so the optimization of the performance of the levitation control system is necessary.
The optimization of magnetic levitation systems can be categorized into two main directions: structural optimization and levitation control system optimization. Structural optimization involves optimizing the magnetic levitation structure to minimize power loss and improve the magnetic force. Zhang et al. 8 proposed a structural optimization design of permanent magnetic levitation magnets to reduce levitation power loss. In contrast, levitation control system optimization involves improving the control system to achieve superior performance. Luat et al. 9 designed fuzzy FTP rules on the original PID controller and made appropriate adjustments to the PID control parameters during maglev control system operation. For high-speed maglev trains, the optimization of the control system can significantly improve control performance without requiring modifications to the levitation solenoid structure, providing a more realistic and cost-effective approach. Shi and She 10 conducted an analysis of the bifurcation conditions and stability of a series-level PID controller in the context of non-linear dynamics. Their findings indicated that small amplitude vibrations could occur within a wide range of control parameters, potentially leading to coupled resonance in the axle. These results demonstrate the strong non-linear characteristics of the levitation control system and emphasize the importance of carefully selecting PID control parameters to avoid magnetic levitation vehicle levitation instability. However, despite the significance of appropriate PID control parameter selection, the control parameters obtained through existing optimization strategies often fail to satisfy multiple indicators simultaneously. This limitation poses a challenge to further improving the smoothness and safety of vehicle operation.
For multi-objective, multivariate, and high-dimensional maglev control parameter optimization models, traditional optimization algorithms are not satisfactory in terms of convergence, computational efficiency, and parameter sensitivity. Meta-heuristic optimization algorithms have become increasingly popular in engineering applications since 1984 due to their conceptual simplicity, ease of implementation, and the ability to bypass local optimization while being gradient information independent. As a result, many researchers have worked on using metaheuristic algorithms to solve multi-objective optimal assignment problem. 11 Among them, inspired by the hierarchical order and hunting behavior of grey wolves in nature, in 2014, Mirjalili et al. 12 proposed a new nature heuristic optimization algorithm called the grey wolf optimization algorithm (GWO). Subsequently, in 2016, Mirjalili et al. 13 proposed an improved algorithm, called multi-objective grey wolf optimization algorithm (MOGWO), which is based on GWO. Due to the simple implementation of the multi-objective grey wolf algorithm with few parameters and strong search capability, it has been improved and used by many scholars. 14 Similarly NSGA-II 15 is Non-Dominated Sorting Genetic Algorithm-II as a classical multi-objective genetic algorithm is often used by scholars for improvement.
In order to improve the performance of GWO, numerous scholars have made various attempts, and the types of modifications can be classified into the following categories: update mechanisms,16,17 new operators,18,19 other algorithmic hybrids,20–23 or population structures and hierarchies. 24 On the improvement problem for MOGWO, Yang et al. 25 proposed an enhanced multi-objective grey wolf optimizer for multi-objective service combination and optimization selection problems in cloud manufacturing. Nuaekaew et al. 26 proposed a dual archival multi-objective Grey Wolf Optimization algorithm (2ArchMGWO) for solving multi-objective optimal power scheduling problems. For NSGA-II, Wang et al. 27 designed CN-NSGA-II by adding chaotic mapping and improving the crossover method for solving the optimal contour of high-speed orbit, while Xu et al. 28 proposed to combine MOPSO with NSGA-II for obtaining the optimal design parameters of aero-engine baffles. However, for the optimization problem of magnetic levitation control parameters, MOGWO is prone to fall into local optimum while NSGA-II has poor convergence performance, which leads to the inability of the two to meet the requirements of solving multi-objective problems. Moreover, there are few studies on the optimization of the control parameters of magnetic levitation systems. The few studies29,30 on the control object are only optimized for a single objective, which is far from enough in combination with the actual background of the need to satisfy multiple targets during the operation of levitation trains.
Based on the problems of the above studies, this paper proposes a multi-objective grey wolf non-dominated ranking hybrid algorithm (CMOGWO-ADNSGA-Ⅱ) to optimize the control system parameters of EMS-type maglev trains for the situation of the indicators that need to be satisfied simultaneously for the safe operation of EMS-type maglev trains. The proposed optimization-seeking approach in this paper improves the initialized particle distribution and the search method of the multi-objective grey wolf algorithm, and combines the characteristics of the improved non-dominated sorting genetic algorithm to increase the number of elite populations. In this paper, the control parameters generated by the new algorithm are applied to the UM-Simulink joint simulation model for control, and the Pareto solution set of control parameters which meet the target index is obtained by iterative search, and the resulting Pareto solution set is reapplied to the dynamics model for simulation to test the effect of the control parameters obtained by the search, and then to judge the effectiveness of the proposed method.
Electromagnetic suspension -type maglev train non-linear dynamics control system establishment
Magnetic levitation non-linear dynamics analysis
EMS-type maglev body transverse view is shown in Figure 1. The maglev train electromagnetic levitation system is usually composed of multiple electromagnet structural modules. The motion of each module has six degrees of freedom: longitudinal, side shift, lift and sway, side roll, and pitch. Transverse view of maglev train.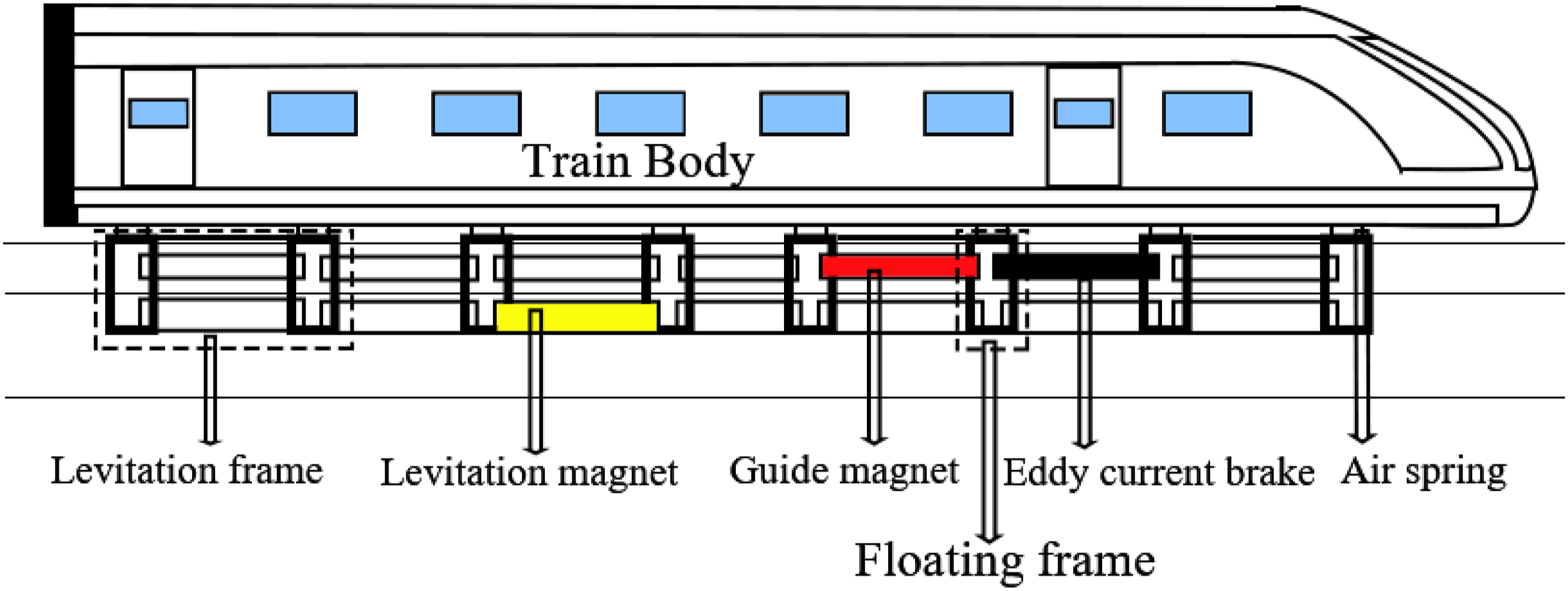
In general, for complex control system design, the system needs to be downscaled to reduce the model degrees of freedom, and the whole system can be decomposed into the control problem of a single levitation magnet; on the other hand, based on the concept of “magnetic wheel” proposed by Gottzein E, 31 the coupling degree between the levitation points of the TR series of maglev trains is greatly reduced. In this paper, based on the reduced order simplification process and the reduced coupling degree, the analysis of the vertical force situation of the electromagnetic levitation system of the maglev train can be analyzed from the perspective of a single electromagnet levitation system.
Figure 2 shows the schematic structure of the levitation system composed of a single electromagnet and a guideway, in which Φ
m
, Φ
T
, and Φ
L
are the air gap flux, total flux, and leakage flux u(t) and i(t) are the electromagnet voltage and current, respectively, and c(t) and h(t) are the actual air gap and the distance between the track surface and the reference plane, respectively. In the analysis of the dynamics model of the single electromagnet levitation system, neglecting the leakage flux and the magnetoresistance in the core and the rail, the electromagnet moves only in the vertical direction, and the direction of the prescribed force is downward as positive. Suspension dynamic model of single electromagnet.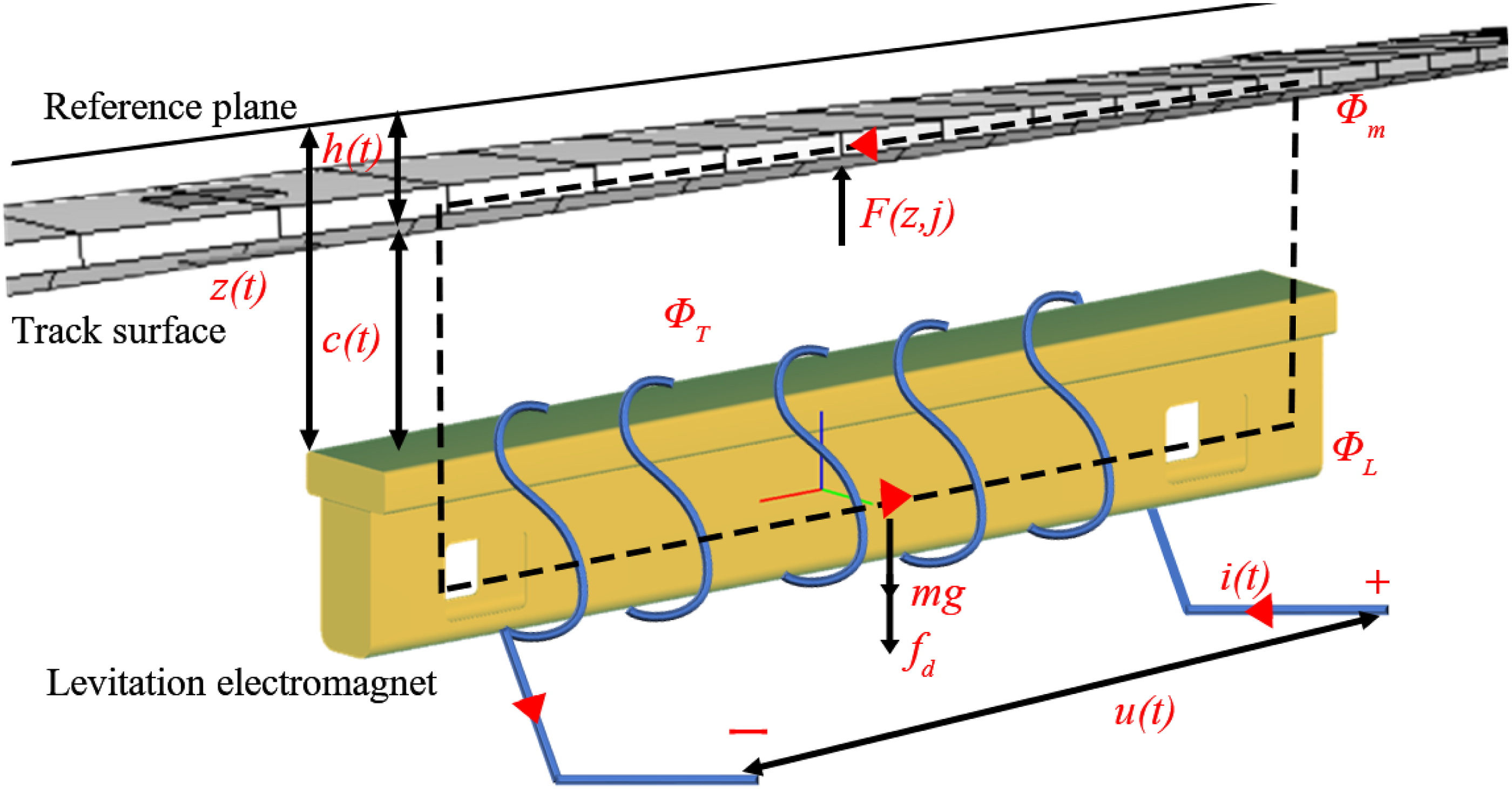
Position of the track in relation to the solenoid:

The system dynamics equation for the electromagnet vertically under the action of the disturbance force f
d
is


From equation (3), it can be seen that the electromagnetic suction force F(z,i) has a non-linear inverse relationship with the air gap z(t), which is the essence of the inherent instability of the electromagnetic levitation system. When the electromagnetic suction force is expanded through a Taylor series at the equilibrium point, it yields:

Neglecting the higher order terms, the linearized form near the neighborhood of the equilibrium point is obtained as

To summarize, the force model of a singular electromagnet in the vertical direction is a collection of non-linear equations that includes equations (1) to (5). This model determines the state of the electromagnet in the vertical direction. Furthermore, since the electromagnetic suction force at the equilibrium point (z
0
,i
0
) is equal to the force of gravity (mg), that is, F (z
0
,i
0
) = mg, the final equation obtained is

Neglecting the effect of the disturbance force f
d
, equation (6) gives the transfer function of the air gap z on the input current i by t Laplace Transform:

The characteristic equation of the system is

The Routh criterion indicates that the system is a second-order unstable system. Therefore, to stabilize the system, closed-loop control must be incorporated by introducing a correlation term to account for the amount of gap variation.
Electromagnetic suspension-type maglev frame non-linear dynamics model establishment
It is known that to ensure the system stability, obtaining each kinetic index is necessary during the operation of EMS-type Maglev trains control process, so it is necessary to establish the EMS-type maglev frame model. In this paper, the multi-body system dynamics simulation analysis software of Universal Mechanism (UM) is used to build the EMS-type maglev train suspension frame model, The EMS-type maglev train suspension frame model is shown in Figure 3. Suspension frame model of EMS-type maglev train.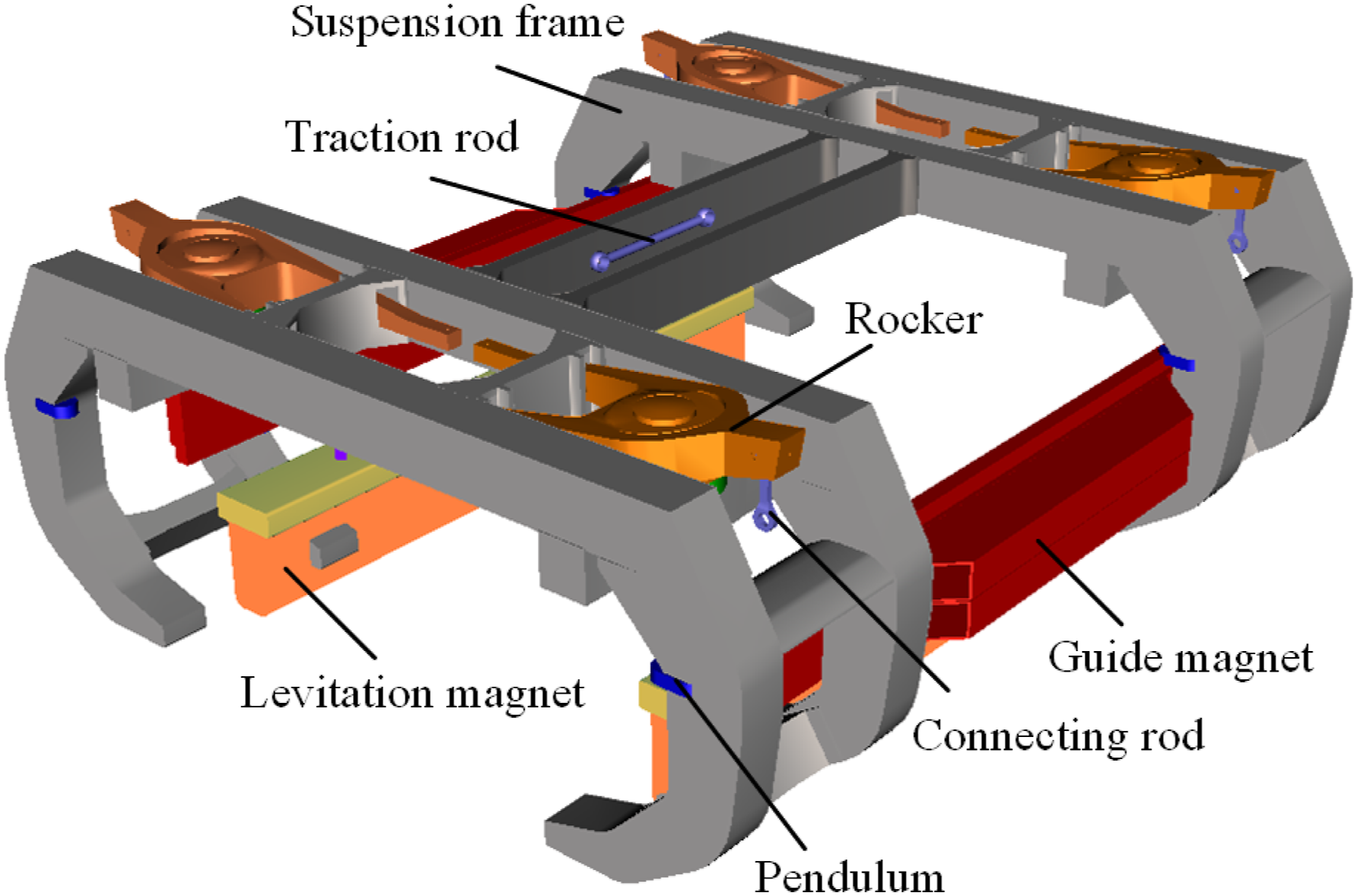
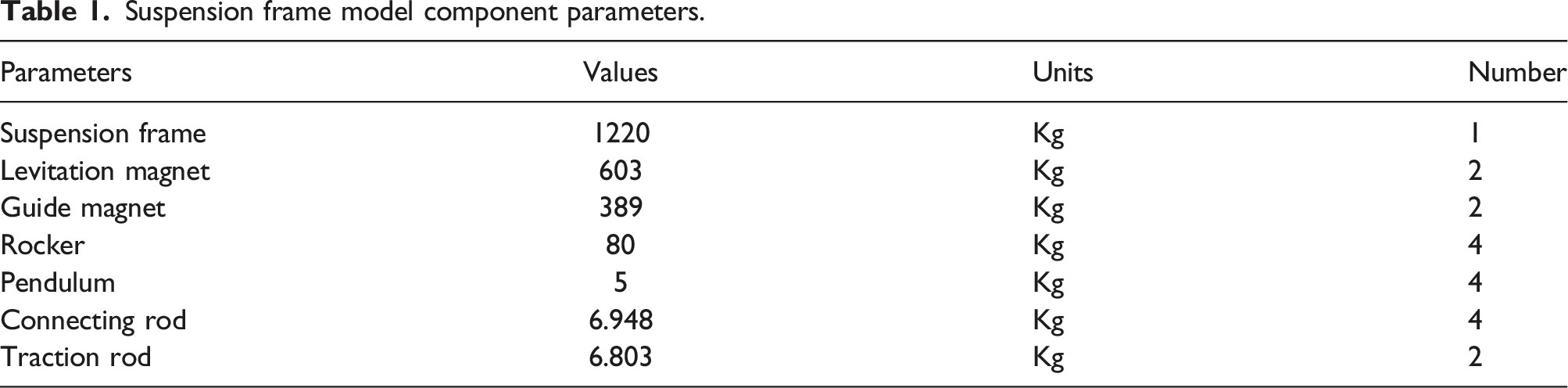
Suspension frame model component parameters.
The magnetic rail interaction relationship is the key technology to realize the magnetic levitation train levitation. In order to reflect the dynamic levitation force, the single electromagnet levitation model analyzed in the previous subsection is used to simulate the levitation electromagnet levitation force element, and in modeling, two concentrated forces are uniformly applied to each levitation electromagnet in the suspension frame model to replace the electromagnetic force in this paper.
Electromagnetic suspension-type maglev frame non-linear dynamics control system design
After dynamics analysis, it is clear that the inclusion of closed-loop control in the control process is essential to ensure the normal operation of EMS-type maglev trains. In this paper, a PID closed-loop controller is used for control. The resulting control operator is shown below: 32
Design and implementation of a 2-DOF PID compensation for magnetic levitation systems
Combining equation (6) yields the system of equations:
Let 
Then the characteristic equation of equation (11) is
Expanded into polynomial form as
According to the Routh–Hurwitz stability criterion, the system is stable under the following conditions:
Since K I < 0, only K p , K i , K d need to be adjusted to keep the system stable.
For a single suspension frame, a total of four suspension force elements are set. At the same time, gap sensors and acceleration sensors are arranged at each force element position of the electromagnet to collect the levitation distance and vertical acceleration between the electromagnet and the rail surface, so as to dynamically adjust the magnetic force and realize the vertical levitation magnetic force control.
This paper adopts the way of unified control for the four suspension force elements set up. The indication diagram for the four-point suspension force element system setting is shown in Figure 4. RB, LB, RF, and LF respectively indicate the right rear end, left rear end, right front end, and left front end. PID controller block diagram of EMS maglev train.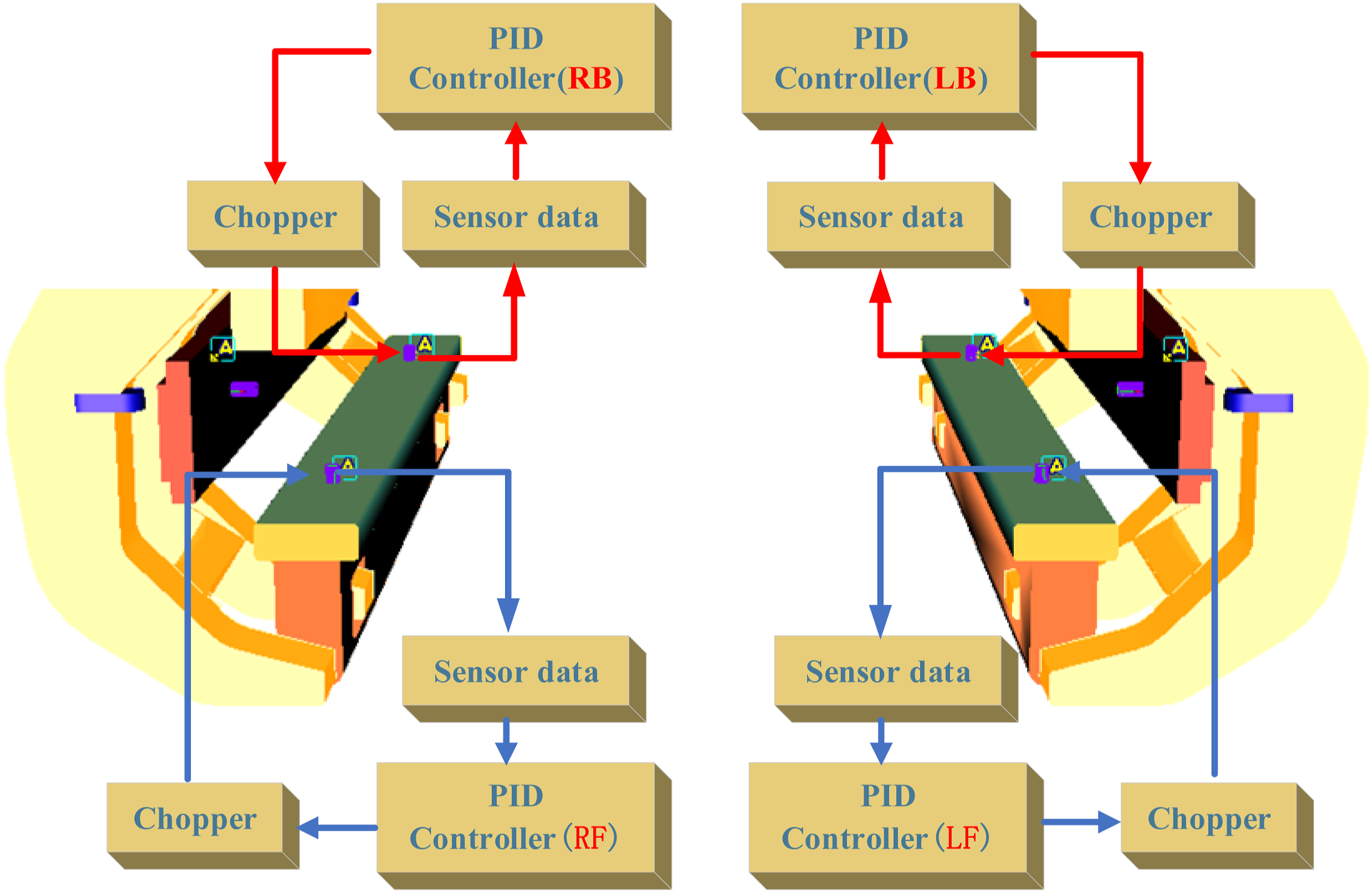
In order to find the values of K p , K i , and K d parameters in the PID controller of the EMS-type maglev control model, researchers need to choose an optimization algorithm adapted to the system to find the optimum for the control system.
Multi-objective grey wolf non-dominated sorting hybrid algorithm (CMOGWO-ADNSGA-Ⅱ)
Improved multi-objective chaotic grey wolf algorithm
Logistic mapping chaos initialization
The improved multi-objective grey wolf algorithm uses chaos initialization for the initial population, which has randomness, ergodicity and initial value sensitivity, allowing the algorithm to converge faster at the beginning. Logistic mapping is an ecosystem model that can be expressed as a non-linear repetitive equation as shown in equation (15):
Improving the convergence factor
In MOGWO, when |α| ≤ 1, the grey wolves concentrate their attack on the prey, which correspond to local search; when |α| > 1, the grey wolves will disperse to find the prey, which correspond to global search.12,33 In the original algorithm, the value of A is determined by the convergence factor α, which decreases linearly with the number of iterations in [0,2], while the search process of the MOGWO algorithm is non-linearly changing, so the linear convergence factor cannot be fully adapted to the MOGWO search process. In this paper, a non-linear convergence factor update is applied as shown in equation (16):
The convergence curve of the non-linear convergence factor combined in this paper is parabolic, with a slow convergence rate at the early stage and a faster convergence rate at the later stage. The slower decay rate in the early iteration can expand the search range and ensure the population diversity to adapt to the global search, and the faster decay rate in the late iteration can improve the solution efficiency to adapt to the local precise search. Therefore, the non-linear convergence strategy proposed in this paper can balance the global search and local search ability more effectively.
Improving the head wolf selection method
In this paper, a new weighting factor is introduced. Since the original MOGWO algorithm updates the grey wolf position by calculating the average of the three best grey wolf positions, this strategy does not consider the problem of the contribution of the three wolves in the group hunting activity.
34
Since the α wolves of the MOGWO algorithm are not necessarily the global optimal solution, this tends to fall into a local optimum as the remaining ω wolves approach these three wolves in continuous iterations. Therefore, a weighting factor is applied from the perspective of the multi-objective grey wolf contribution problem, which is used to enhance the merit-seeking ability of the MOGWO algorithm.

Since the coefficient vectors A and C in the MOGWO algorithm are dynamic and random, and the weighting factor should be similar to the convergence factor through the previous subsection, which will change with the non-linear adjustment of the merit-seeking process, the weighting factor designed in this paper is derived from the coefficient vectors A and C.
In the basic MOGWO algorithm, the vectors A
1
, A
2
, A
3
and C
1
, C
2
, C
3
are not identical. Here, to ensure the correlation of weight factor updates, A
1
, A
2
and A
3
are designed to be identical and C
1
, C
2
and C
3
are identical, as follows:

The 3-dimensional representation is given in Figure 5.
35
Possible next position of grey wolf.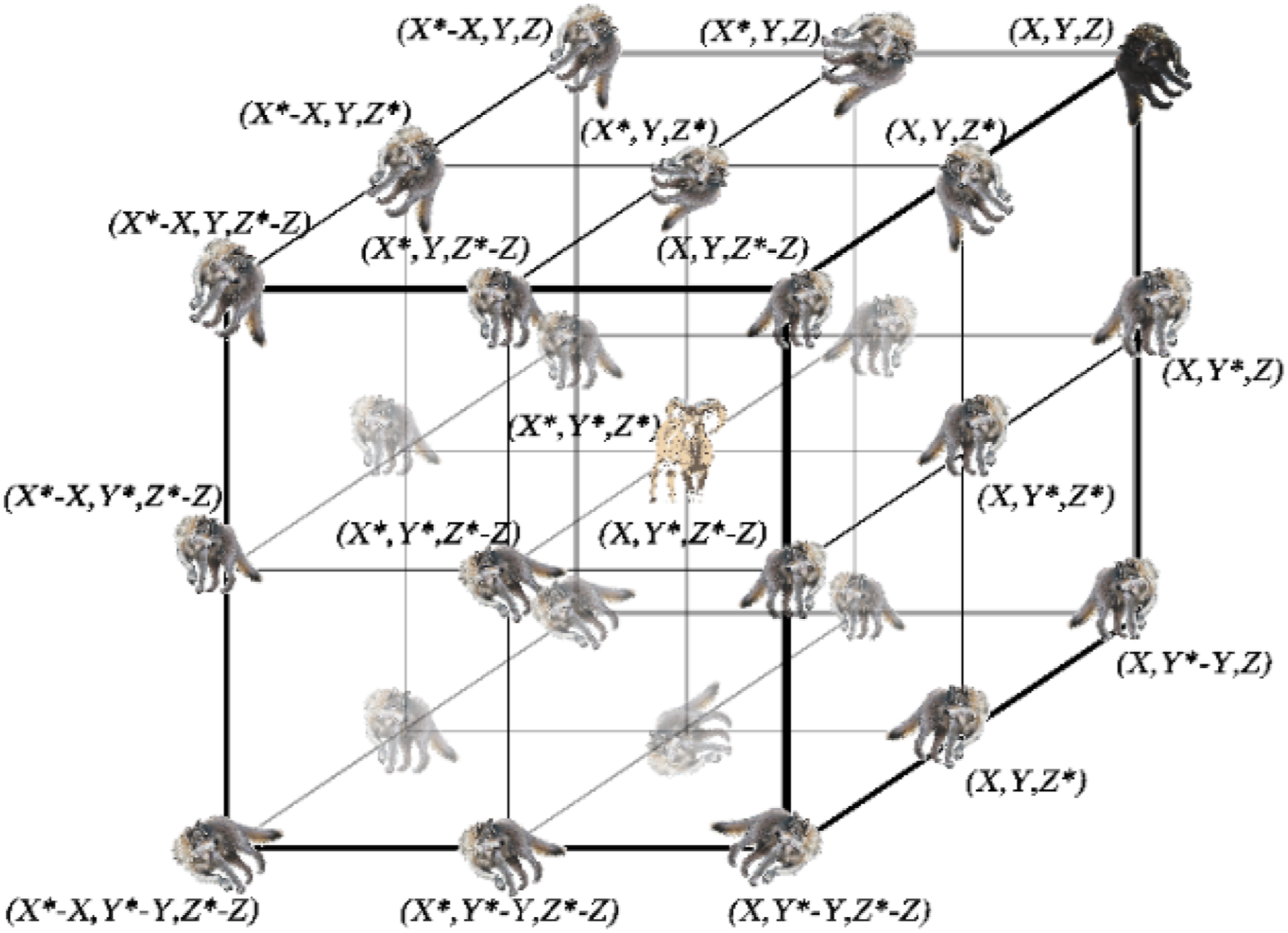
Disrupt operator
In order to enhance the diversity of the population to improve the chance of finding the global optimal solution and effectively increase the convergence speed, this paper moves the particles satisfying the destruction conditions to get rid of the situation of being trapped in the local optimum by the following destruction strategy. Correspondingly, the following equations (21) and (22) are used to destroy the molecules.
When the number of overlapping optimal front-end solutions exceeds half, a large perturbation is added:
When G
best
= 0, determine whether there are too many overlapping points, when the distribution of disrupted molecules is as follows:
The final parameter value associated with each particle should be the corresponding position value multiplied by the corresponding damage molecule value before the algorithm passes the particle. The formula is as follows:
Improved non-dominated sorting genetic algorithm-II (ADNSGA-Ⅱ)
NSGA-II 15 is an improved version of NSGA (Non-Dominated Sorting Genetic Algorithm). 36 This paper used the normal distribution crossover operator (NDX) to replace the original simulated binary crossover operator (SBX) to enhance the spatial search capability of the fusion algorithm afterwards.
Assume the parent generations P 1 and P 2 , and generate the children as x 1 and x 2 using NDX. For the ith variable, the crossover process is as follows:
First generate a random number t∈(0, 1].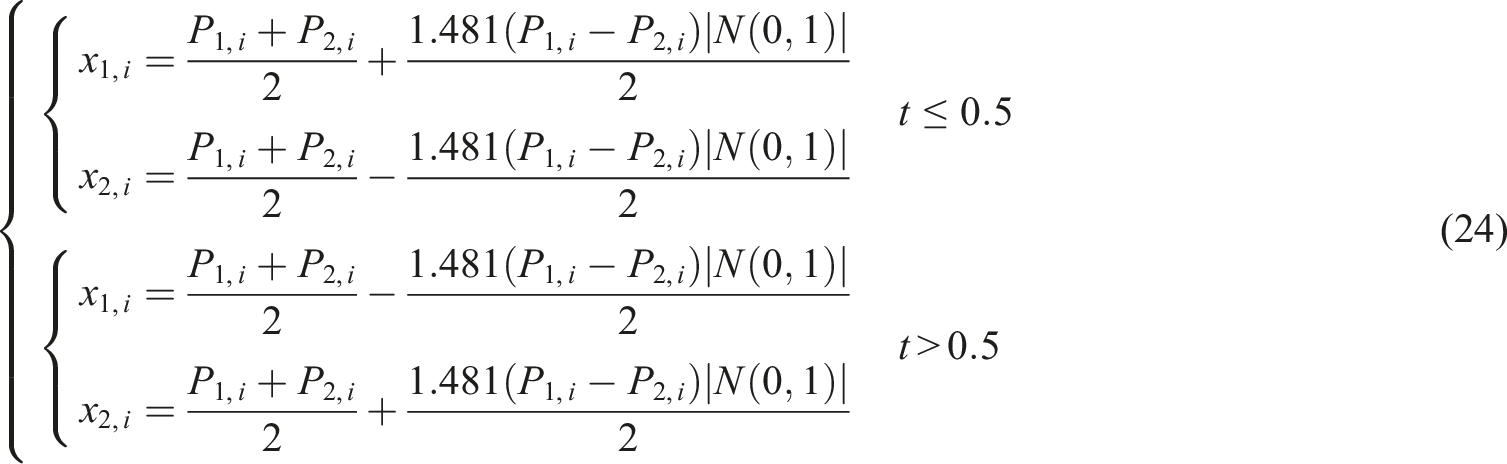
To verify the efficiency and rationality of introducing NDX in the improved algorithm and to compare the advantages offered by SBX, this subsection compares the two in a one-dimensional search space. The experiment is given the positions of two parent individuals in the space, and 5000 independent calculations are performed to generate 10,000 child individuals, respectively, to obtain their distribution in the search space, where P1,i = 0.8, P
2,i
= 0.2, γ = 20, X denotes the child individuals in the search space The distributions of SBX and NDX operators in the search space are respectively shown in Figure 6(a) and 6(b). Distribution of search space of SBX and NDX operators. (a) SBX (b) NDX.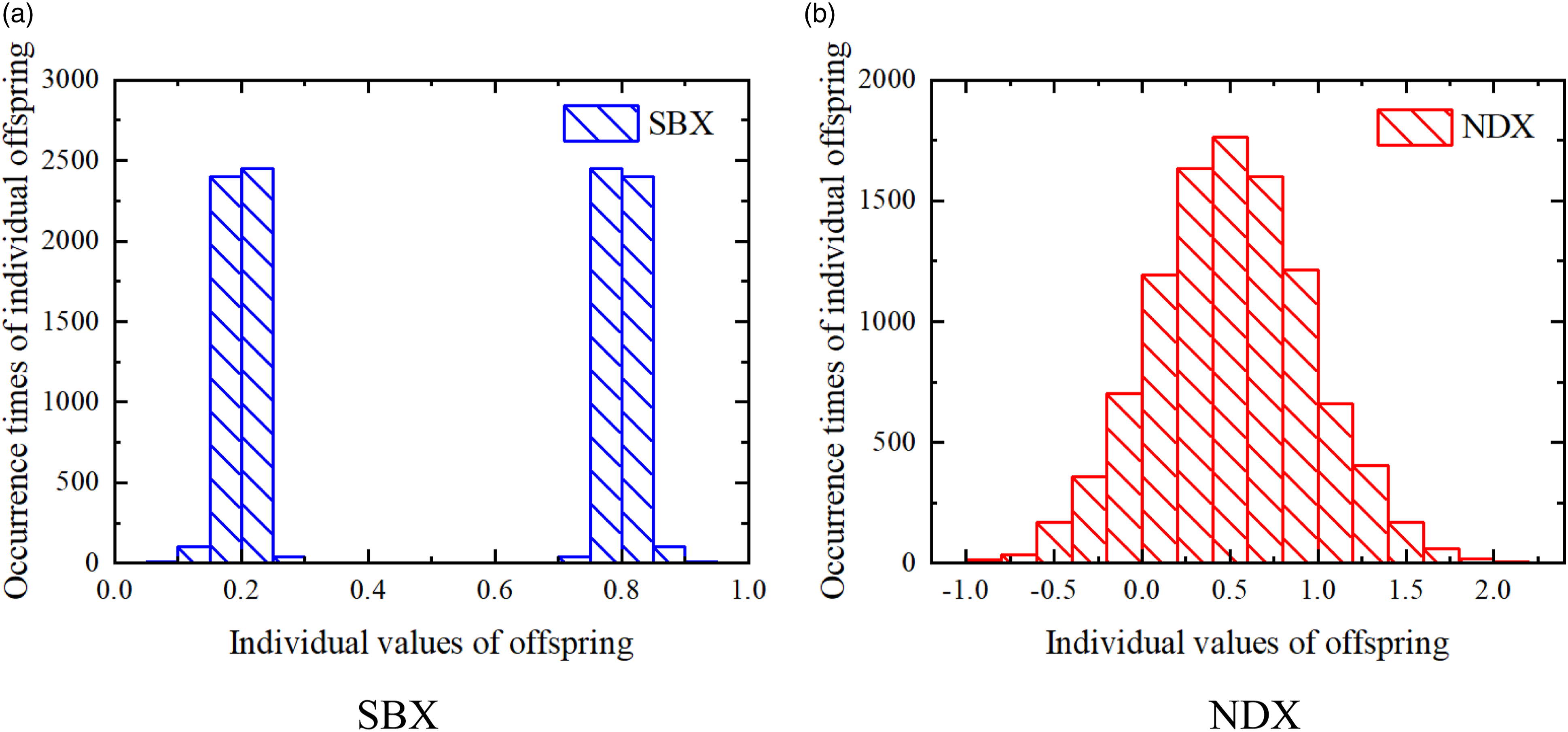
Observing and comparing Figure 6(a) and 6(b), it can be seen that the spatial search range obtained by NDX (−1.09–2.22) is more uniform and expansive than that of SBX (0.01–0.98), and thus it is easier to get rid of the limitation of local optimum, and the complete Pareto optimal solution set can be obtained faster.
Multi-objective grey wolf non-dominated sorting hybrid algorithm (CMOGWO-ADNSGA-Ⅱ)
This subsection applies the multi-objective grey wolf algorithm mixed with non-dominated sorting to the multi-objective optimization problem, in addition to using strategies such as improved convergence factor, improved head wolf selection method, disrupt operation (Dop), and orthogonal distribution cross operator (NDX) described in the previous subsection to improve the search capability of the hybrid algorithm while ensuring the diversity of the target population. The flow chart of the multi-objective grey wolf non-dominated sorting hybrid algorithm is shown in Figure 7. The flow-process diagram of CMOGWO-ADNSGA-Ⅱ.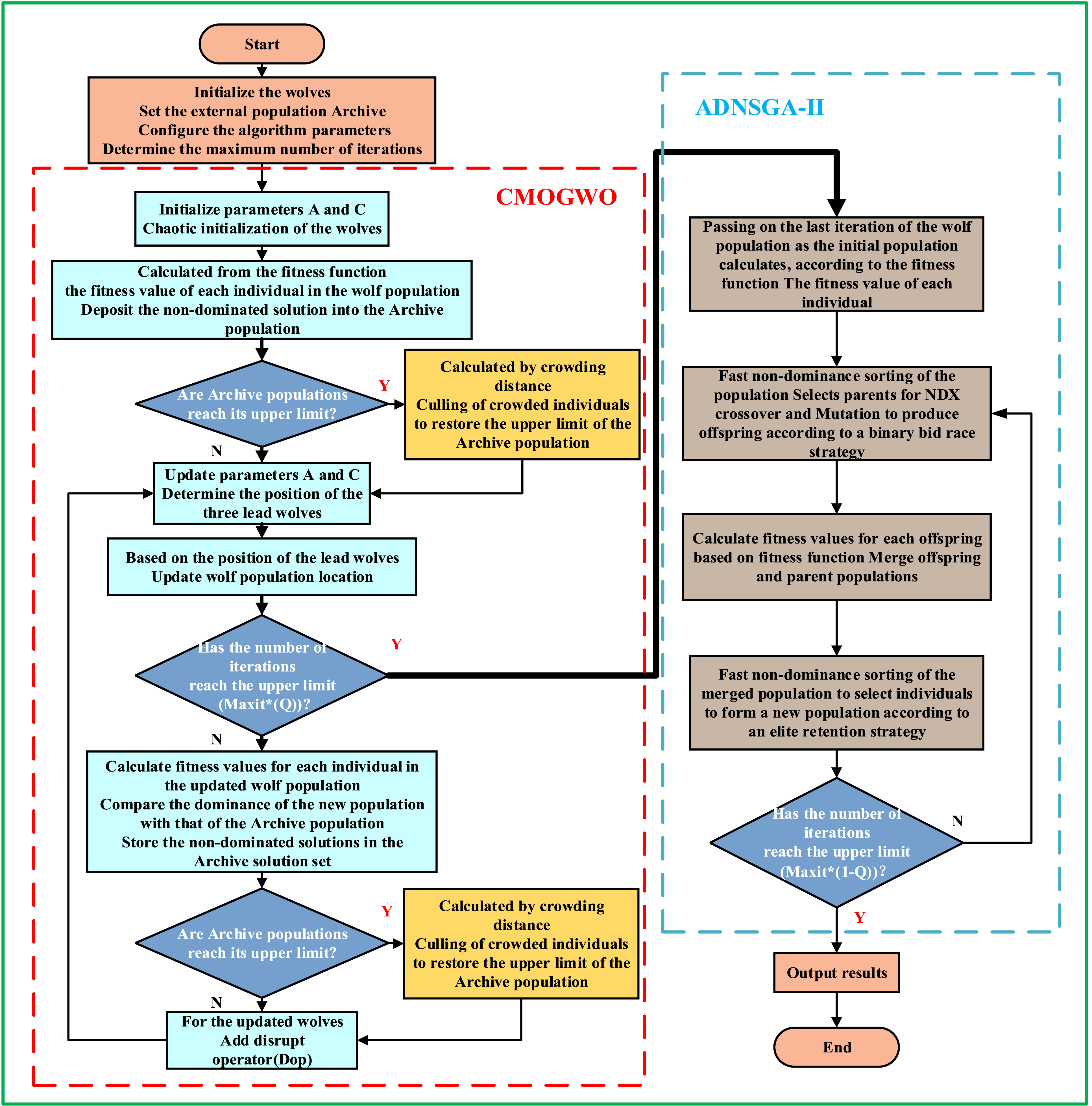
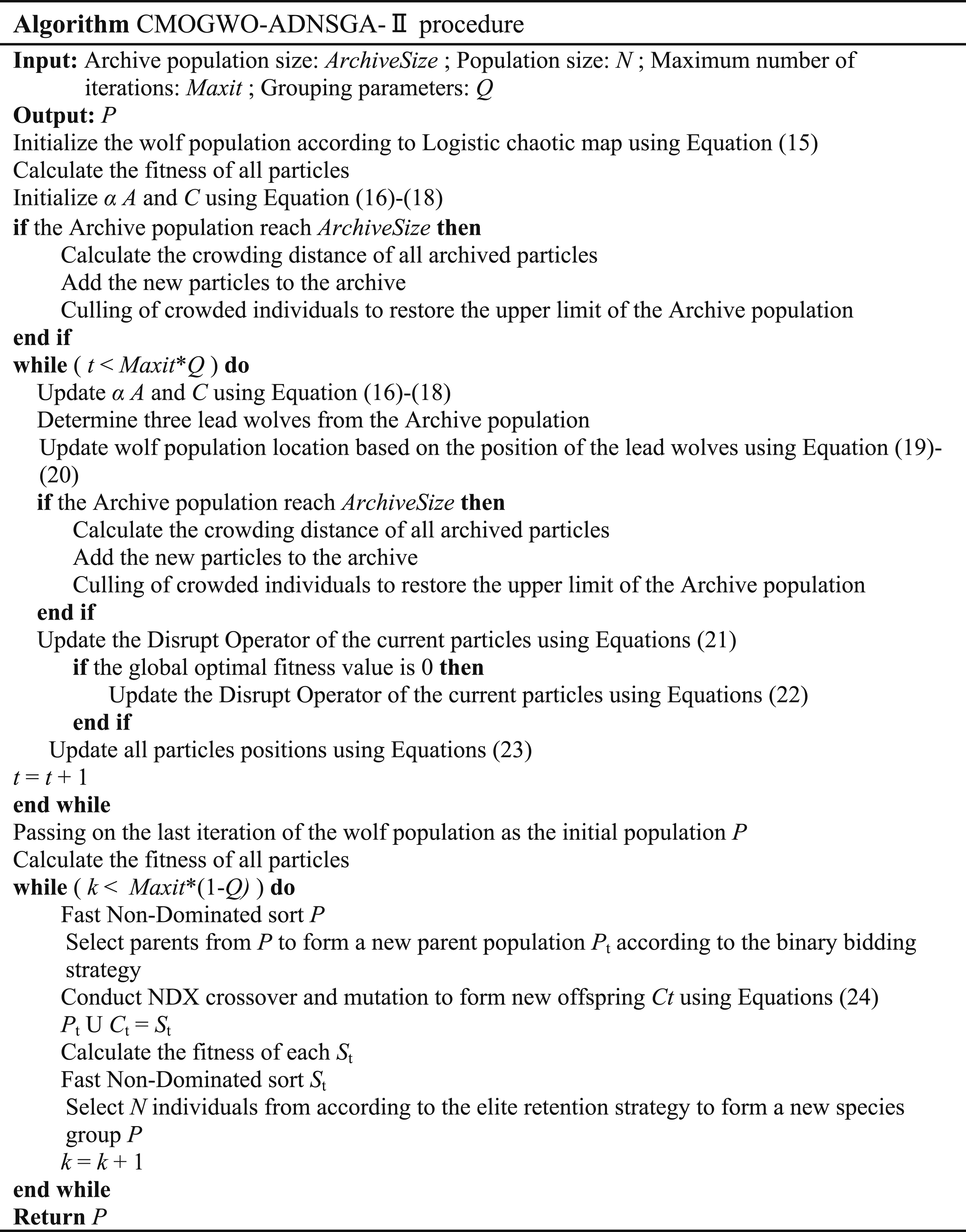
Algorithm CMOGWO-ADNSGA-II procedure
Experimental study of algorithm comparison
Experimental setup
In general, benchmark problems, such as ZDT, 37 are used to test the performance of the algorithms. These benchmark problems are considered to be the most challenging problems in the algorithm. The number of target indices of the ZDT problem is two, which is the same as the number of target indices of the magnetic levitation control system in this paper, so the ZDT problem is chosen as the benchmark problem for testing.
All computational procedures for the test functions were implemented using MatlabR2020b on a laptop with a Ryzen 7-5800H 3.2 GHz processor and 16.0 GB of RAM.
Details of the test sets used in this subsection are given in Appendix 1. As can be seen in the Appendix, the test functions have different Pareto optimal fronts: concave, convex, linear, and separated. Most of them are multi-peaked in the search space, where several local fronts prevent the solution from moving easily towards the true Pareto optimal frontier.
To validate the results of the proposed CMOGWO-ADNSGA-Ⅱ algorithm, the results were compared with recognized and popular multi-objective algorithms in the literature, such as NSGA-Ⅱ, 15 MOPSO (Multi-Objective Particle Swarm Optimization Algorithm), 38 MOEA/D (Multi-Objective Evolutionary Algorithm Based on Decomposition), 39 and MOGOA (Multi-Objective Grasshopper Optimization Algorithm). 40 The results were collected and compared qualitatively and quantitatively. For quantitative comparisons, three widely used performance metrics were used to evaluate the convergence and diversity of the Pareto solutions.
The first performance metric used was the generation distance (GD), defined as follows:
The second performance metric used is the inverse generation distance (IGD) often used to measure the convergence of approximate Pareto solutions. It is defined as follows:
To obtain the diversity of Pareto solutions by a quantitative comparison algorithm, this paper uses the spacing (SP) to estimate the degree of uniform distribution of populations on the found set of Pareto solutions, and SP is defined as follow:
The parameter setting of algorithms.

For all algorithms, all experiments were also repeated 20 times for the benchmark problem in order to reduce the stochastic error of the simulation. In particular, only when the solution set is close enough to the real Pareto front, then the smaller the GD, IGD, the better the quality of the solutions. When the solution set covers all solutions sufficiently, then the smaller the SP, the more excellent the diversity uniformity of the solutions.
Analysis of results
Statistical results for GD on ZDT1 to ZDT6.
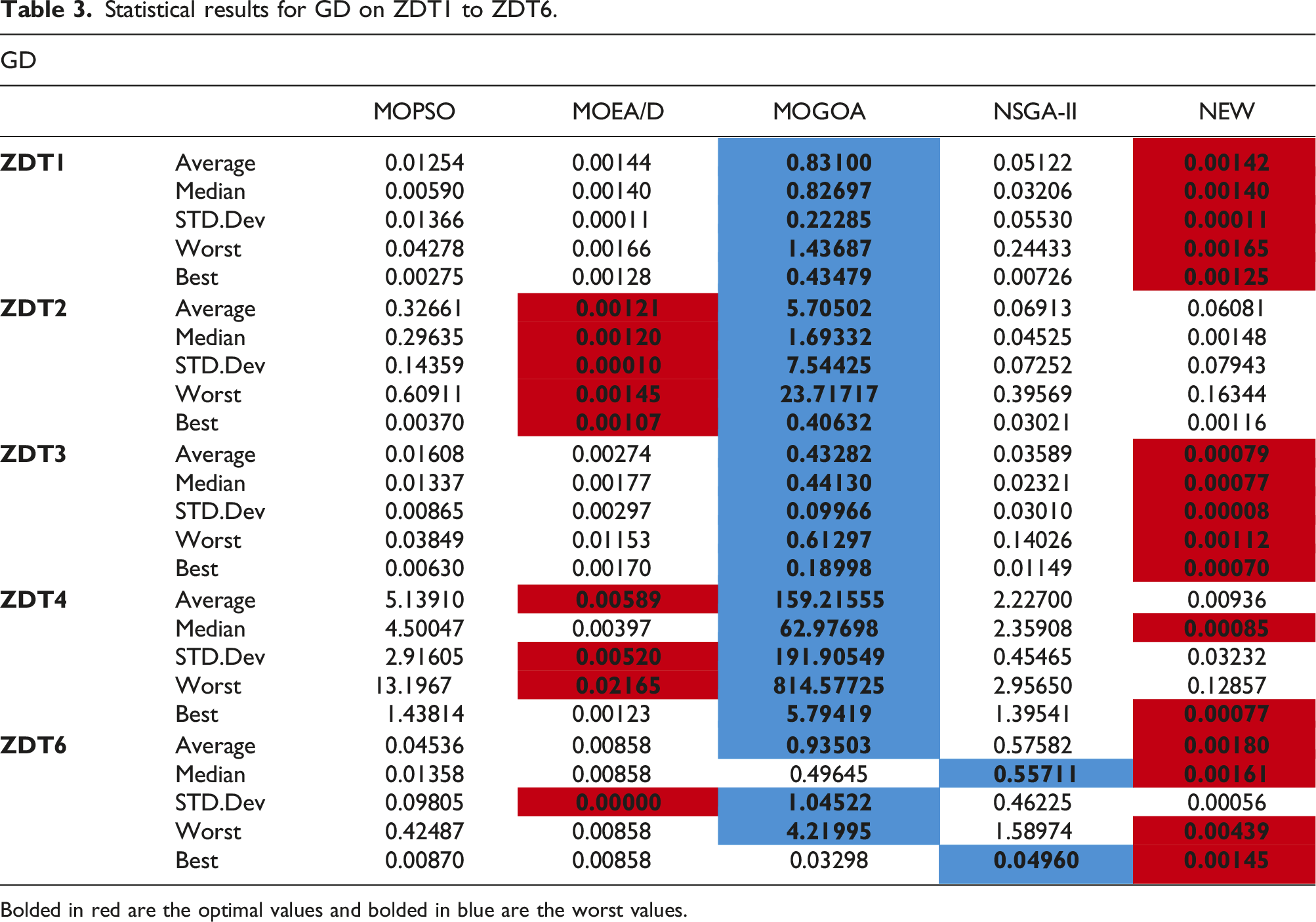
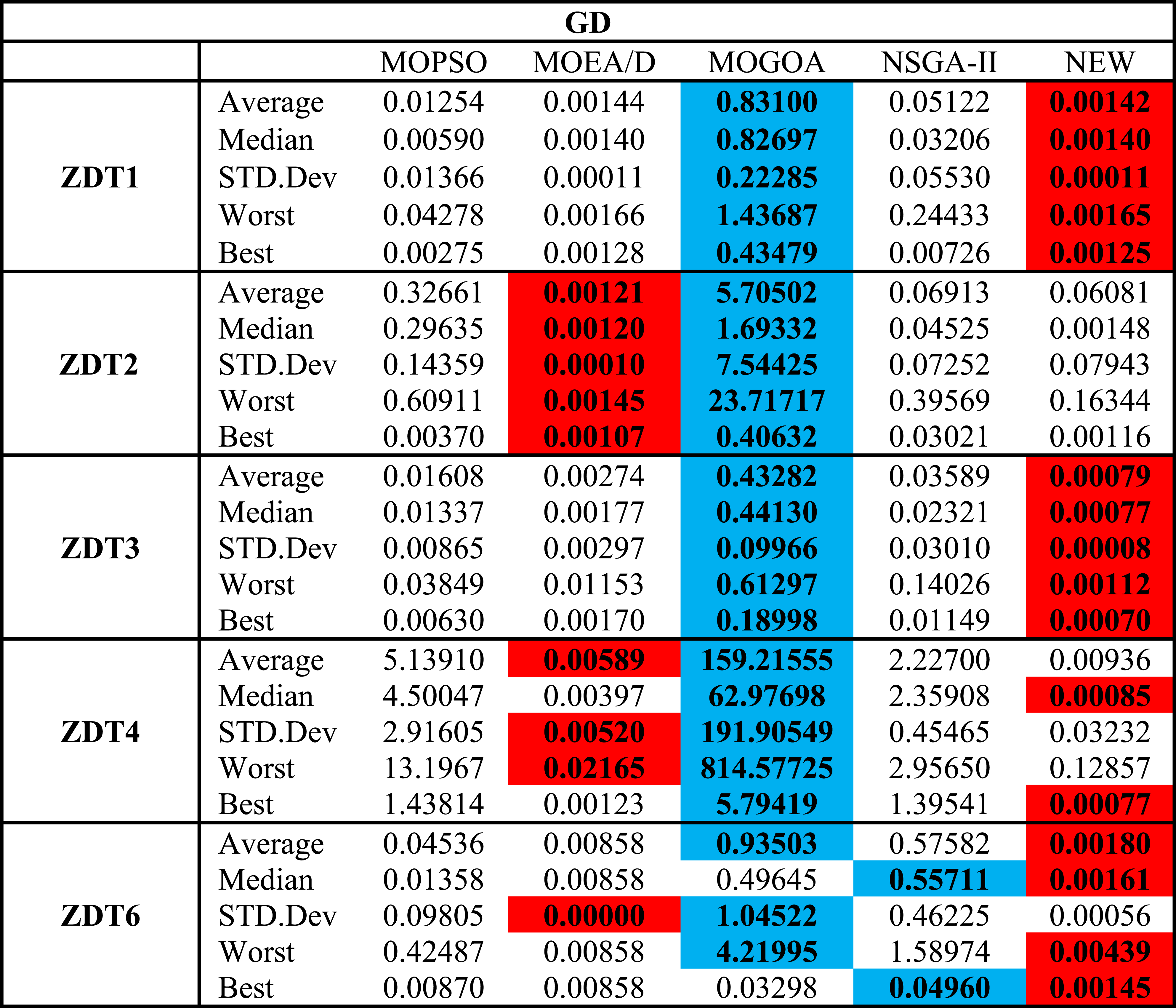
Bolded in red are the optimal values and bolded in blue are the worst values.
Statistical results for IGD on ZDT1 to ZDT6.
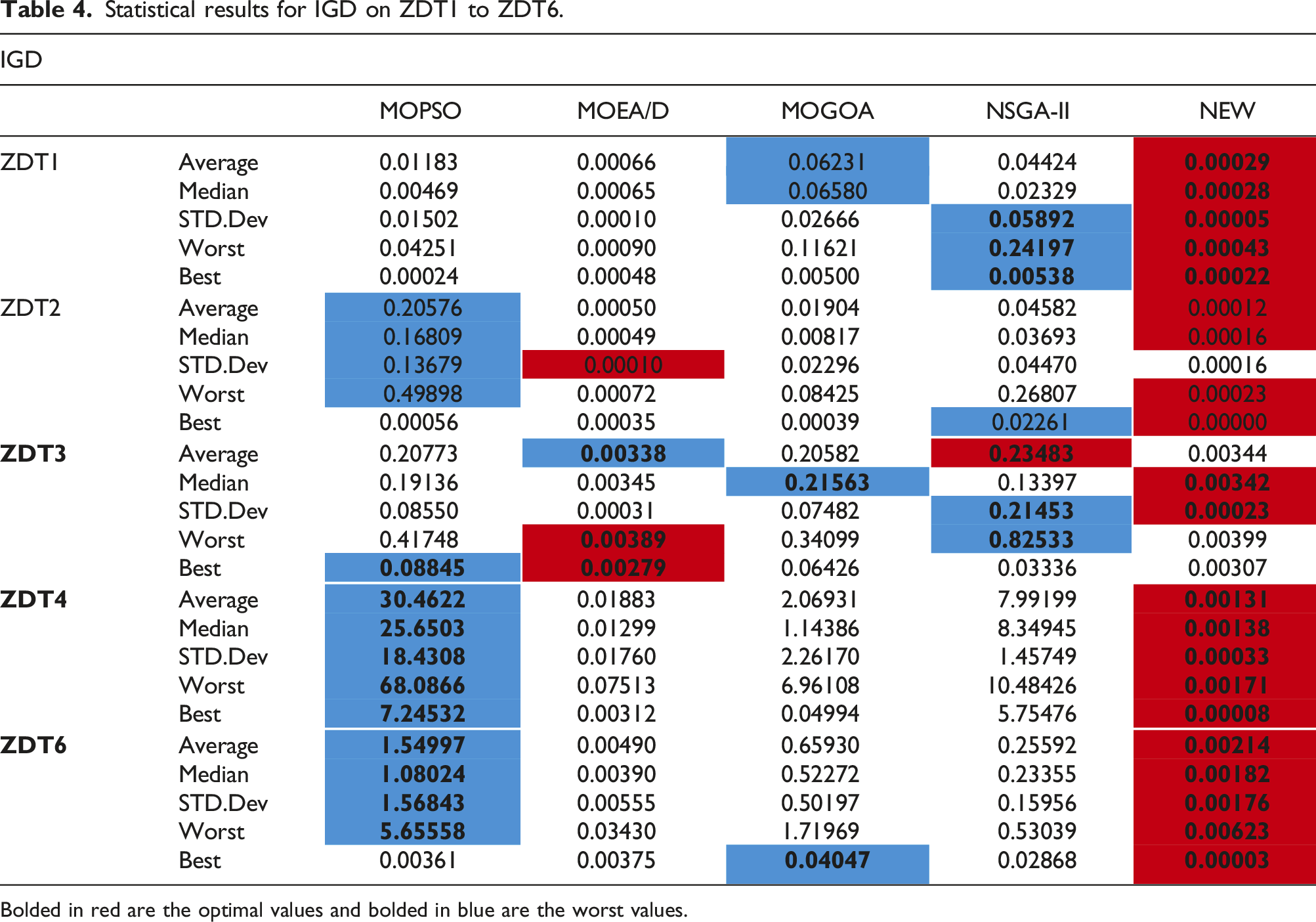
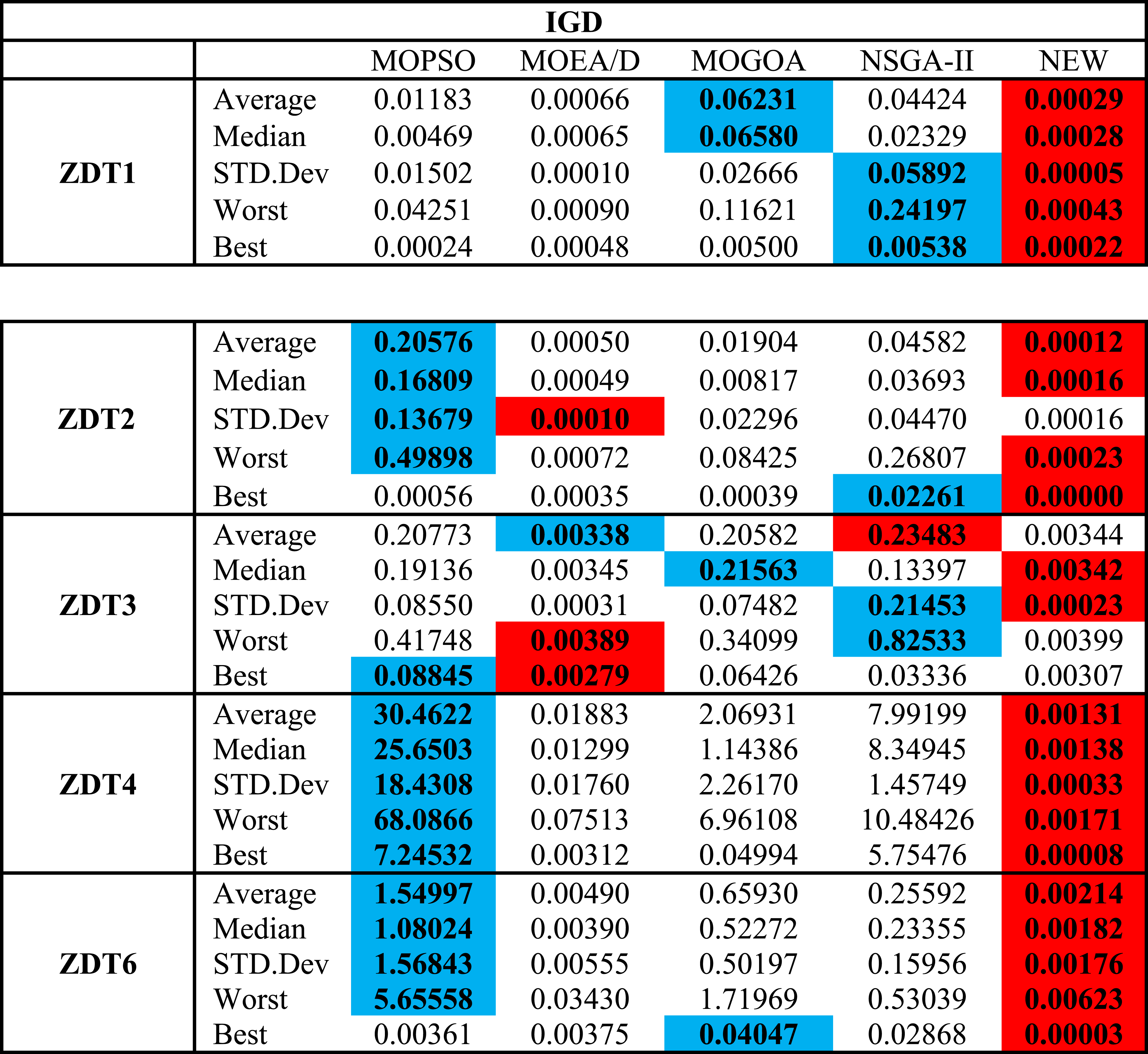
Bolded in red are the optimal values and bolded in blue are the worst values.
Statistical results for SP on ZDT1 to ZDT6.
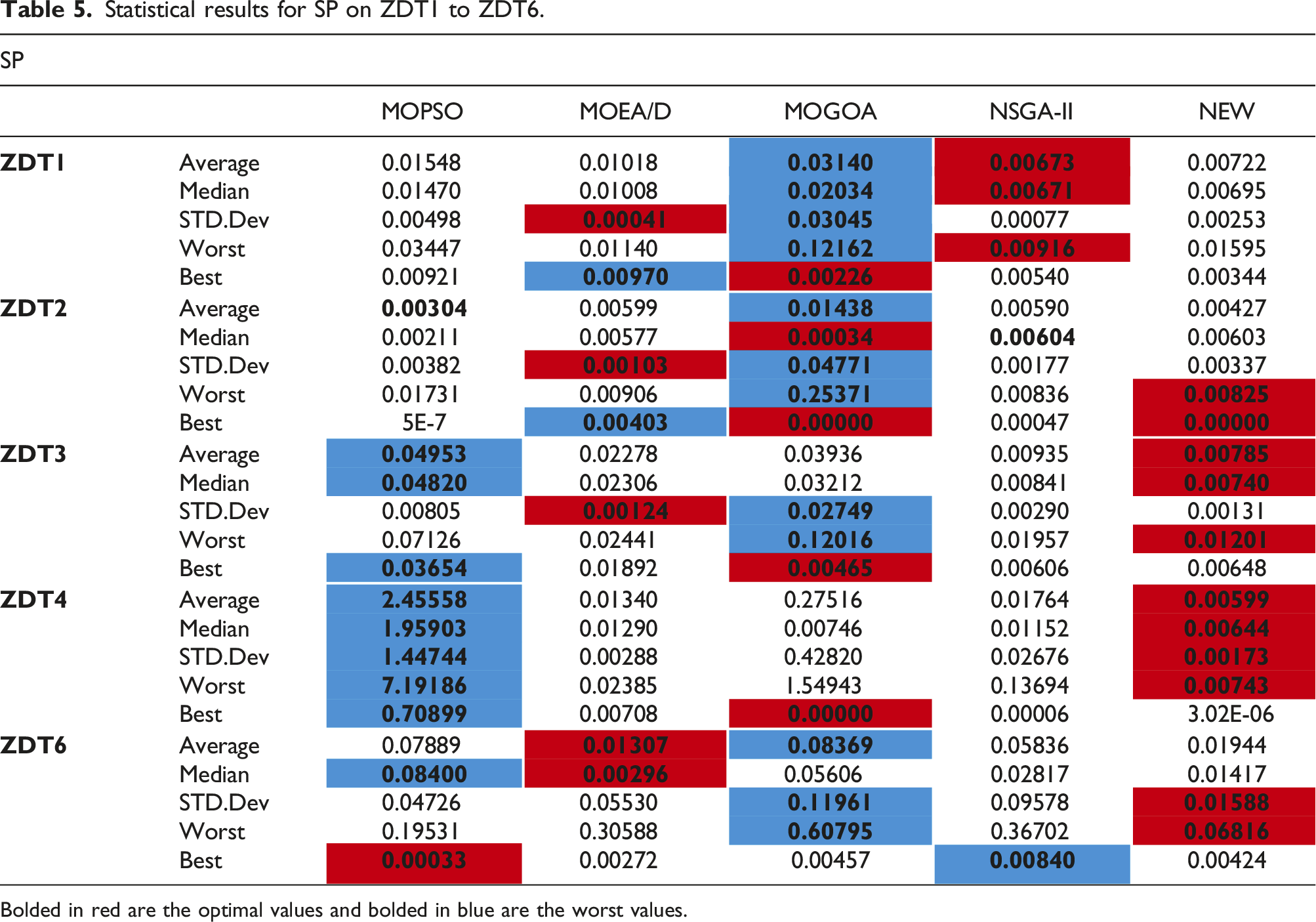
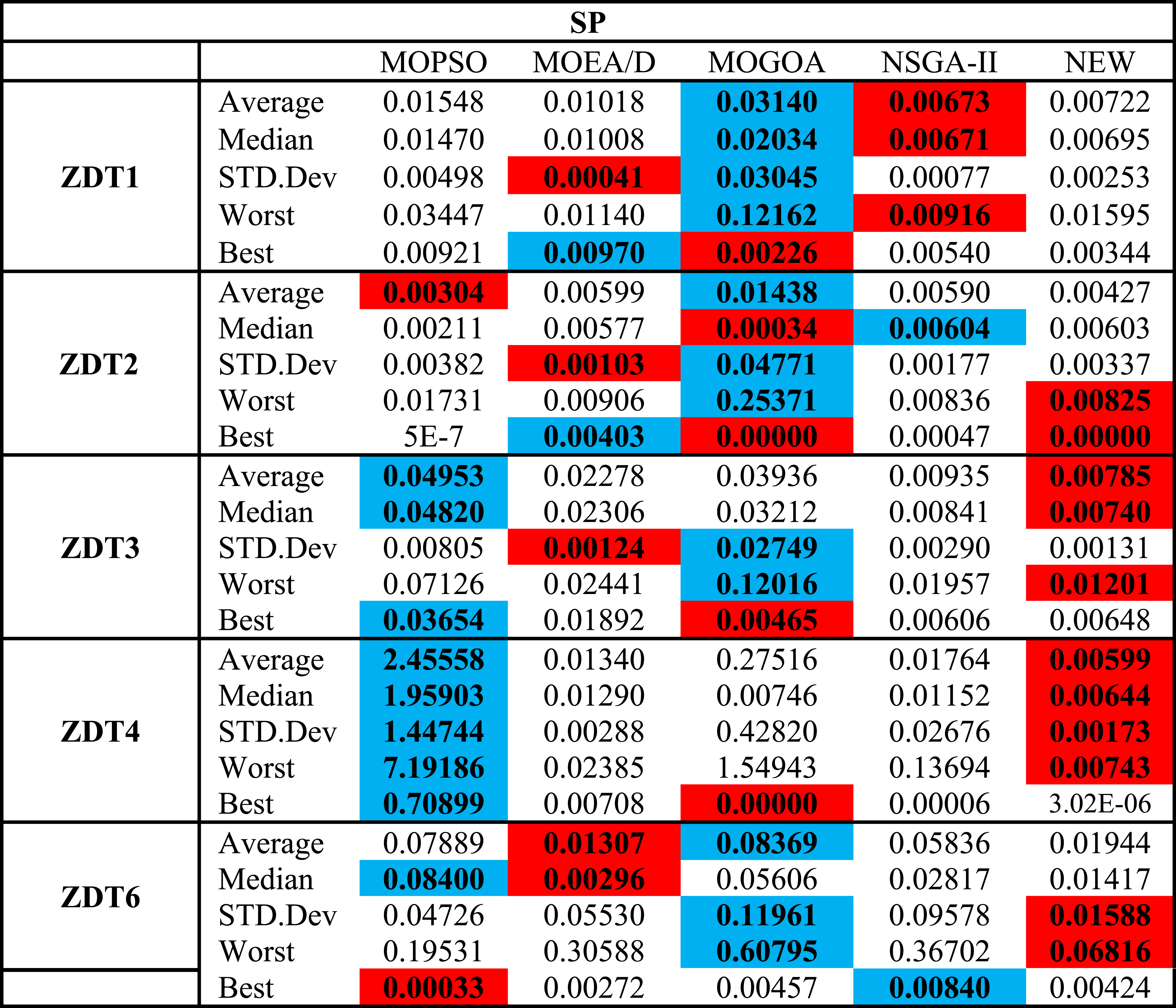
Bolded in red are the optimal values and bolded in blue are the worst values.
Comparison of GD values
When observing the GD value in Table 3, the data in the table shows that the CMOGWO-ADNSGA-Ⅱ algorithm has become the most competitive algorithm among the compared algorithms, having the best values for the ZDT1, ZDT3, and ZDT6 problems and the second best values for the ZDT2 and ZDT4 problems, but the stability of the new proposed algorithm is more excellent for the ZDT4 problem. This indicates that the proposed CMOGWO-ADNSGA-Ⅱ algorithm has excellent convergence performance and is more stable.
Comparison of IGD values
When observing the IGD value in Table 4, the data in the table shows that the CMOGWO-ADNSGA-Ⅱ algorithm has optimal values for ZDT1, ZDT2, ZDT3, ZDT4, and ZDT6 problems in terms of mean, median, standard deviation, minimum, and maximum values. This indicates that the proposed CMOGWO-ADNSGA-Ⅱ algorithm has excellent convergence performance and is more stable than the comparison algorithm.
Comparison of SP values
When observing the SP value in Table 5, the data in the table indicates that the CMOGWO-ADNSGA-Ⅱ algorithm has optimal values for ZDT3 and ZDT4 problems and suboptimal values for ZDT1, ZDT2, and ZDT6. This indicates that the proposed algorithm has optimal solution coverage compared to the comparison algorithms.
Experimental study of magnetic levitation control parameters
Experimental setup
The three control parameters K p , K i , and K d of the maglev controller have an important impact on the overall stability performance parameters of the vehicle, and failure to select the appropriate parameters will lead to unbalance and even derailment of the overall levitated train with unpredictable consequences. During the equilibrium period, the car body should ensure that the car body vertical acceleration and suspension gap are within the international limit, so the stability control of the magnetic levitation system is transformed into a multi-objective optimization problem.
The equations for the calculation of the levitation forces are shown below:
In this paper, the design of the electromagnet of the suspension frame of the Shanghai TR08 Maglev train is based on the relevant parameters, the number of turns N of the electromagnet winding is selected to be 270 turns, the effective area S of the electromagnet is 0.121 m2, the air permeability μ 0 is 4π*10−7 N/A2, and the air gap c(t) is set to be 0.01 m. The problem of PID control of the size of the suspension force is refined into the problem of controlling the size of the coil current i(t).


Input control parameter ranges.

After the algorithm comparison in the previous chapter, it is known that CMOGWO-ADNSGA-Ⅱ is more advantageous in solving the dual-objective problem, so the minimum value of the result of the objective problem will be solved by the proposed CMOGWO-ADNSGA-Ⅱ. The algorithm parameters are set as follows: the number of grey wolves is 30, the number of individual archives is 10, and the maximum number of iterations is 50, (the number of iterations of the grey wolf algorithm accounts for 10% of 5, and the number of iterations of NSGA-Ⅱ accounts for 90% of 45).
The procedure for determining the best control parameters involves the utilization of real-time joint simulation, utilizing the suspension control module Simulink and the UM suspension frame model. Initially, new control parameters are created through an optimized algorithm, which are then applied to the controller, resulting in the generation of real-time suspension force in the UM model for control. The real-time feedback data obtained from the UM model is analyzed for reference, providing insight for the next control parameter. This process is repeated until a predetermined number of algorithms are completed, and then the optimal Pareto front-end solution is output. Different combinations of control parameters are selected based on various requirements. The overall process is shown in Figure 8. Schematic diagram of control parameter optimization process.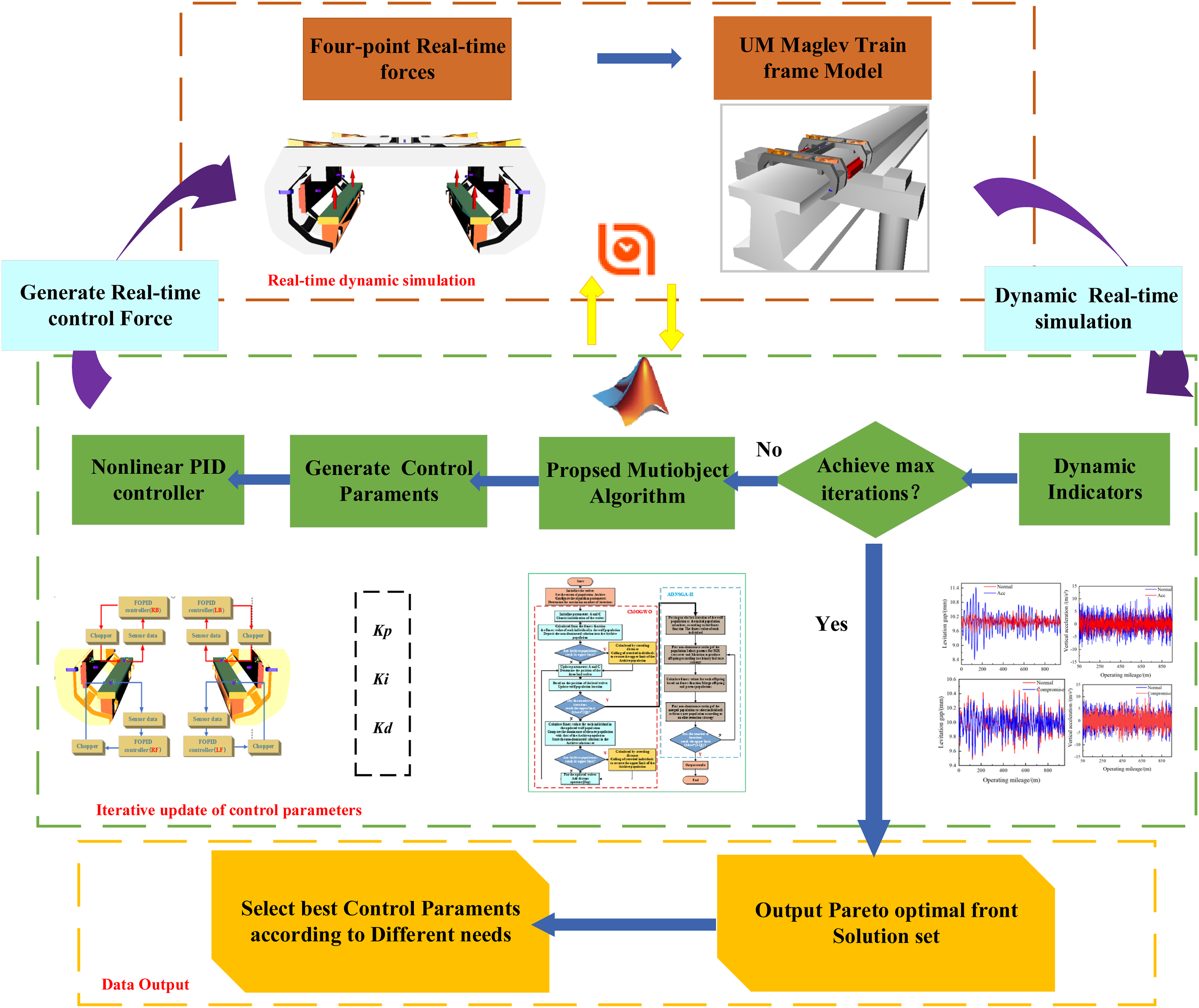
Combined with the actual situation, the track construction period, may be caused by the track surface roughness, adjacent track section misalignment, construction tolerances, pier height difference, bearing settlement, etc. lead to the generation of track unevenness,41,42 the same will affect the determination of the levitation control parameters.
This paper combined with the actual route measurement data of Shanghai Maglev train, data fitting can be obtained as follows for the levitation magnet running route left and right-side vertical unevenness. The values are placed as the disturbance term of the gap measurement in the control process. The variation of the left and right vertical unevenness values of the track with the running mileage is shown in Figure 9. In order to reduce the computational pressure in the calculation process, this paper ignores the wind resistance during the train operation, as well as the changes in temperature changes on the magnetic levitation force, etc. Variation diagram of vertical irregularity value at left and right sides of track.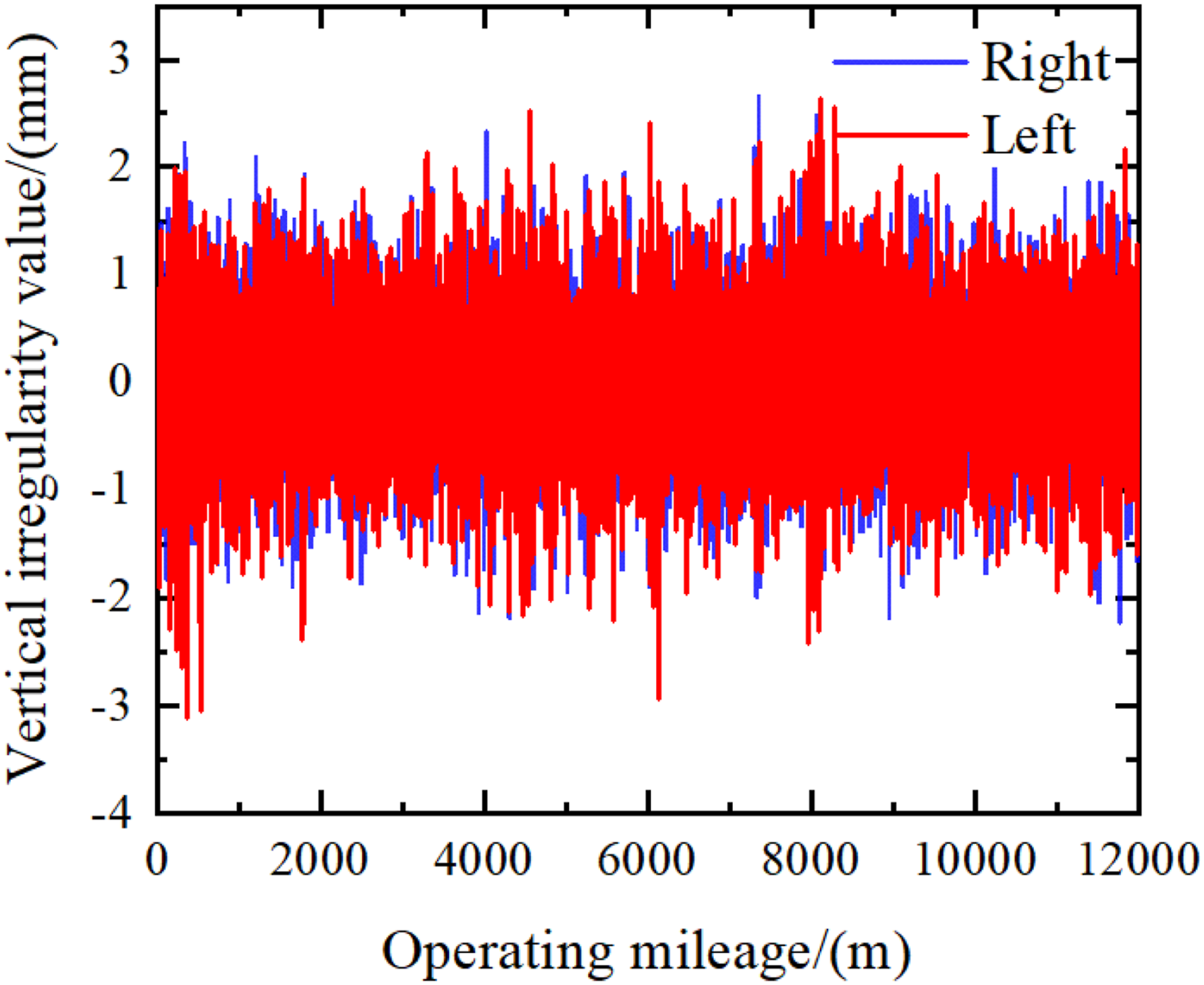
Analysis of results
The algorithm, with the parameters set in the previous subsection, can be optimized by proposing CMOGWO-ADNSGA-Ⅱ to obtain the Pareto solution set of the solved problem, as shown in Figure 10, and the corresponding control parameters can be selected to achieve the desired control effect according to the actual problem requirements. Schematic diagram of Pareto solution set of model calculation.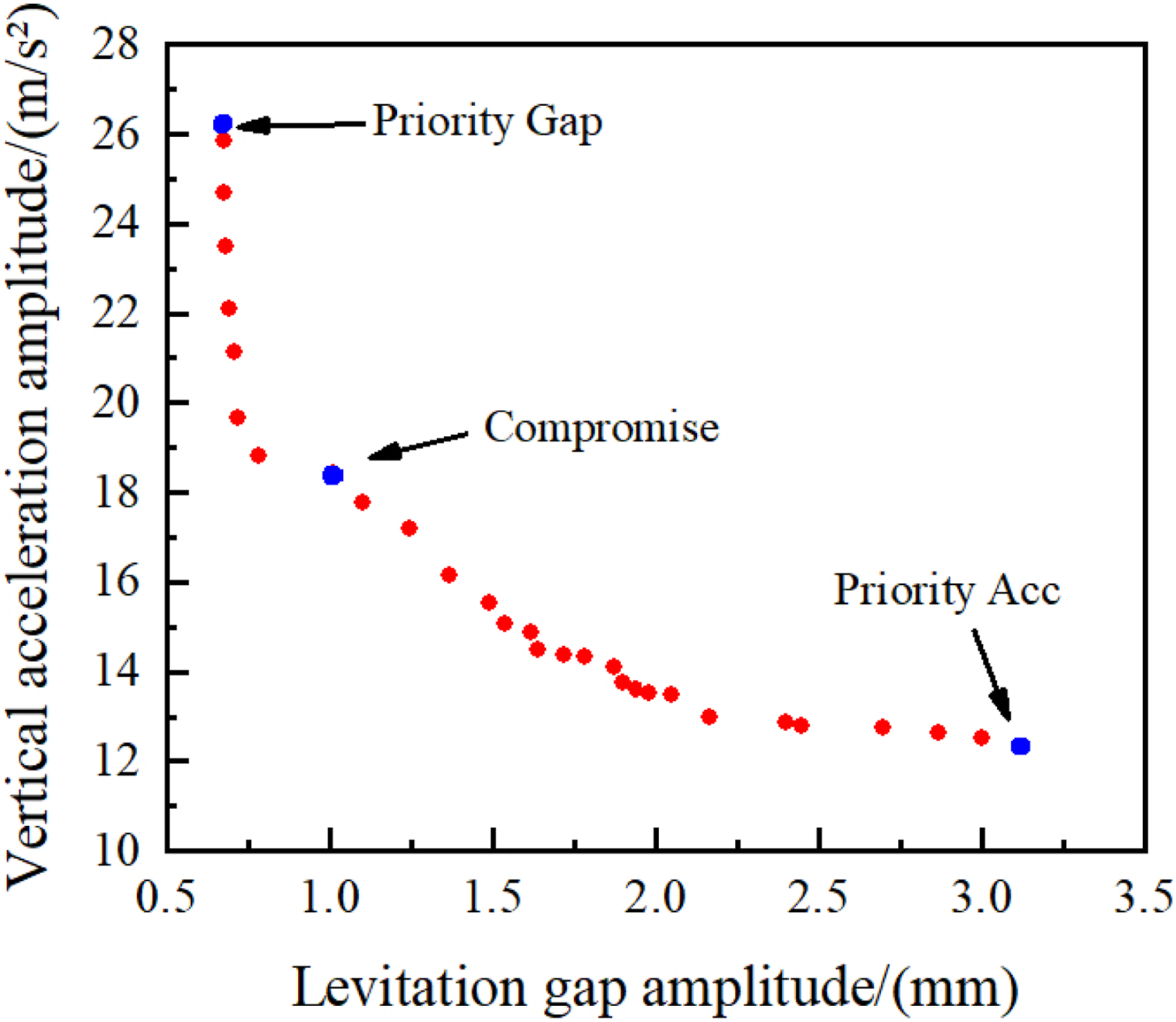
Control parameter value table.

Comparison of vertical acceleration
The simulation comparison of the mean change of vertical acceleration at the selected four points with different control parameters is shown in Figure 11 below, and the specific values of the result comparison are shown in Table 8. From Figure 11 and Table 8, it can be seen that, compared with the simulation results of empirical parameters, the acceleration amplitude is reduced by 35% and the standard deviation is reduced by 38% for the priority acceleration control case, and the acceleration amplitude is reduced by 5% and the standard deviation is reduced by 10% for the case where both metrics are taken into account. Comparison diagram of vertical acceleration change. (a) Priority acc. (b) Priority gap. (c) Compromise. Comparison table of vertical acceleration results.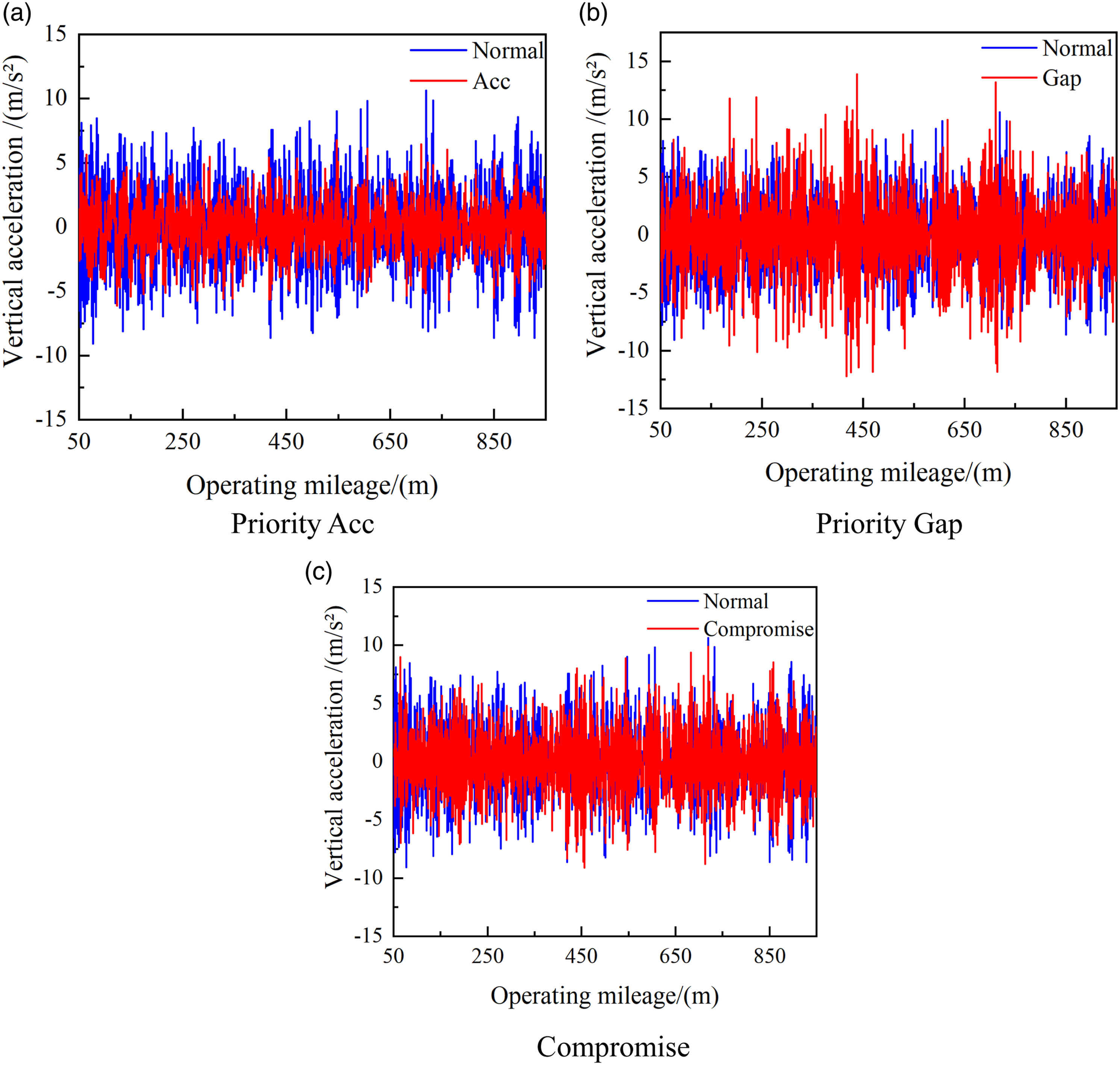

Comparison of levitation gap
The simulated comparison of the mean value of the suspension gap at the four points selected for running the suspension frame model with different control parameters is shown in Figure 12 below, and the specific values of the results are shown in Table 9. From Figure 12 and Table 9, it can be seen that, compared with the simulation results of empirical parameters, the levitation gap amplitude is reduced by 33% and the standard deviation is reduced by 32% for the priority levitation gap control case, The levitation gap amplitude is reduced by 15% and the standard deviation is reduced by 14% for the case where both metrics are taken into account. Comparison diagram of levitation gap change. (a) Priority acc (b) Priority gap. (c) Compromise. Comparison of levitation gap results.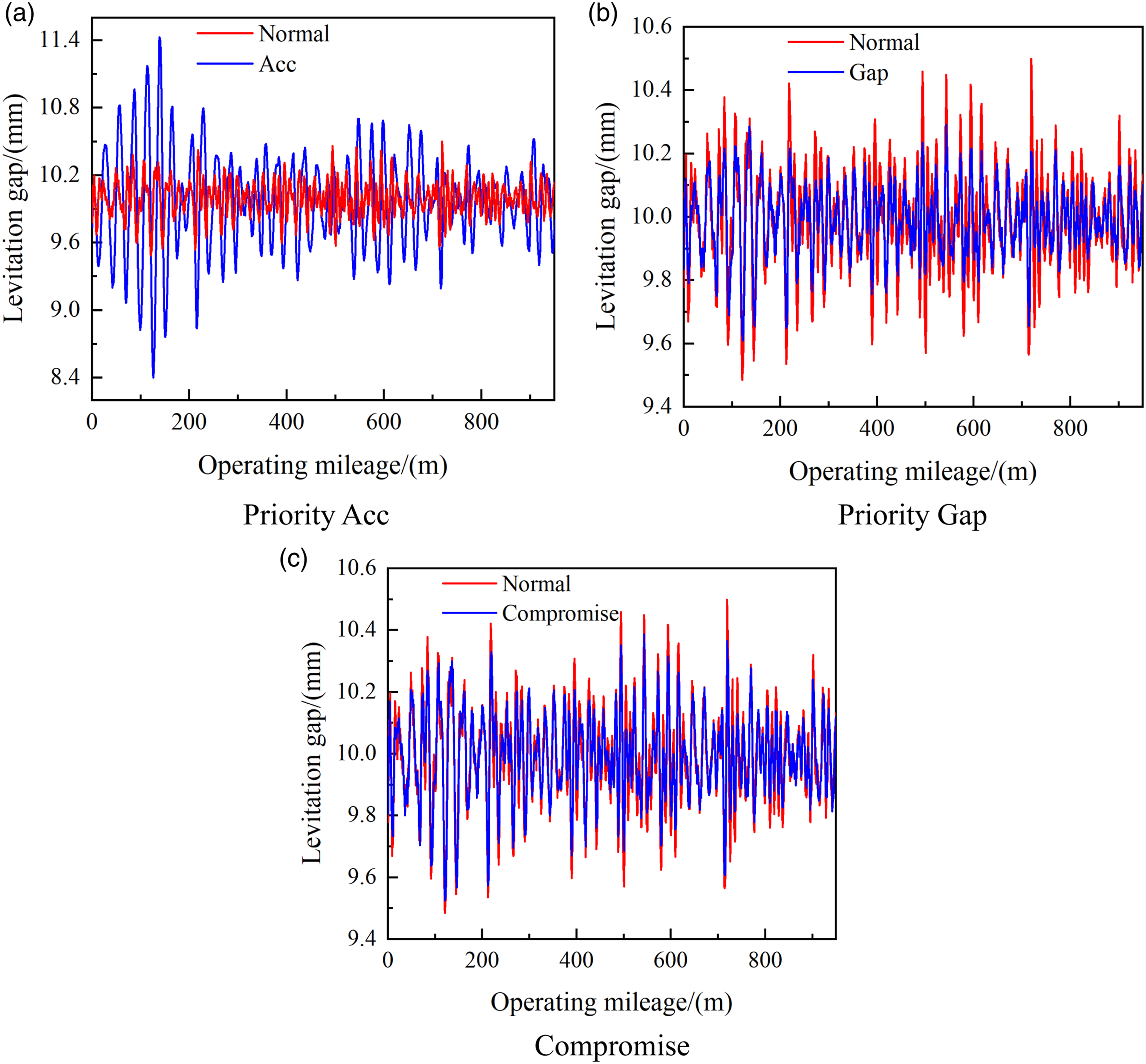

In summary, the experiments show that the kinetic indexes related to the maglev train suspension frame are significantly improved by using the control parameters after CMOGWO-ADNSGA-Ⅱ optimization search, which are better than the kinetic indexes obtained from the control of empirical control parameters. Also based on the obtained Pareto set, suitable control parameters can be selected for control according to the different needs of the field situation.
Conclusion
In this paper, CMOGWO-ADNSGA-Ⅱ is applied to the EMS-type maglev train control system parameter optimization method, and the levitation gap and vertical acceleration of the established EMS maglev train levitation frame model are reduced by the way of finding the optimal control parameters. The main conclusions are as follows: The MOGWO algorithm is improved by adding chaotic initialization, Disrupt Operator, non-linear convergence factors, and ways to change the weights of the head wolf position, while combining NSGA-Ⅱ with cross-variant evolution using the NDX crossover operator, and this improvement allows the algorithm to improve its own search capability while ensuring the diversity of the target population. Comparing with other algorithms, the proposed CMOGWO-ADNSGA-Ⅱ is found to be feasible in solving the multi-objective merit search problem. The control parameters of the EMS-type train magnetic levitation frame control system are optimized with the levitation gap and vertical acceleration of the EMS-type levitation frame model as the optimization objectives, and the optimized levitation gap amplitude is reduced by 15 to 33%, corresponding to a standard deviation reduction of 14 to 32%. The optimized vertical acceleration amplitude is reduced by 5 to 35%, and the corresponding standard deviation is reduced by 10 to 38%.
This study presents a novel optimization technique for selecting parameters in the suspension control system of an electromagnetic suspension (EMS) type Maglev train, with a primary focus on addressing the vibration stability problem in the operation of an EMS type Maglev train suspension model subject to strong non-linear magnetic buoyancy forces. The proposed method offers a theoretical foundation for mitigating the negative effects of strong non-linear electromagnetic forces and enhancing operational performance. The findings of this study hold significant relevance for solving the parameter design issues within the suspension control system of EMS-type maglev trains and augmenting the overall stability of maglev trains.
Scope
In this paper, the research object is only the EMS train maglev frame, but for the whole train, despite the simplified operation, the overall model also exists nearly 128 degrees of freedom, combined with the optimization algorithms need to achieve a number of cyclic recurrent work situation, and the subsequent computational difficulty will be greatly increased. Afterwards, the study expects that under the premise of retaining the original mechanical structure of the magnetic levitation train, combined with the wind resistance perturbation and the influence of temperature change on the levitation force of the EMS maglev frame, which is not combined in this paper, a more excellent optimization algorithm is used, which is combined with the neural network, to form a magnetic levitation system that can be referred to as an expert experience system before the operation.
Footnotes
Author contributions
Meiqi Wang: Conception of the study, Performed the Scheme design. Methodology, Writing - Review & editing. Siheng Zeng: Algorithm writing, Data analysis, Writing - original draft. Pengfei Liu: Helped the feasibility analysis, The revision of the manuscript preparation. Yixin He: Supervision, Helped perform the analysis with constructive discussions. Enli Chen: Helped perform the analysis with constructive discussions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the research and development efforts have been supported by National Natural Science Youth Fund Project (No. 12102273); The Hebei Provincial Natural Science Foundation (No. A2022210024). S&T Program of Hebei(No. 21567622H).