
Abstract
Proportional-integral-derivate (PID) controller has gained popularity since the advancement of smart devices especially in suppressing the vibration on flexible structures using different approaches. Such structures required accurate and reliable responses to prevent system failures. Swarm intelligence algorithm (SIA) is one of the optimization methods based on nature that managed to solve real-world problems. Crow search is a well-known algorithm from the SIA group that can discover optimum solutions in both local and global searches by utilizing fewer tuning parameters compared to other methods. Hence, this study aimed to simulate a PID controller tuned by SIA via crow search for vibration cancellation of horizontal flexible plate structures. Prior to that, an accurate model structure is developed as a prerequisite for PID controller development. After the best model is achieved, the proportional-integral-derivative-crow-search (PID-CS) performance was compared to a traditional tuning approach known as the Ziegler Nichols (ZN) to validate its robustness. The result revealed the PID-CS outperformed the proportional-integral-derivative-Ziegler Nichols (PID-ZN) with attenuation values of 44.75 and 42.74 dB in the first mode of vibration for single sinusoidal and real disturbances, respectively. In addition, the value of mean squared error (MSE) for PID-ZN and PID-CS for single sinusoidal disturbance are 0.0167 and 0.0081, respectively. Meanwhile, PID-ZN and PID-CS achieved 2.3981 × 10−4 and 2.3737 × 10−4 when they were exerted with real disturbance. This proves that the PID-CS is more accurate compared to the PID-ZN as it achieved the lowest MSE value.
Keywords
Introduction
Control systems play a prominent role in diverse fields to assure human ease and comfort with the implementation of smart devices such as sensors and controllers. Smart devices are beneficial, notably, in applications that require minimal human monitoring. In 2019, the nation was startled by the COVID-19 pandemic, in which the virus spread rapidly through human contact. Thus, numerous researchers have contributed ideas in converting manual methods into motorized systems, especially for applications that involve physical human interaction. 1 For instance, autonomous mobile robots (AMR) now assist patients in hospitals by bringing food and medicine. 2 Aside from the medical industry, AMR is present in the food, logistics, and manufacturing sectors. 3 Normally, an AMR uses flexible plate structure to carry goods because of its simple shape and lightweight feature.
The fundamental factor driving inventors to adopt flexible structures as the primary geometry in their applications is caused from the lightweight nature, which allows robust response, facile implementation, and easy operation. 4 With heavy structures, such machinery may respond slowly and require multiple employees to maintain and operate the system. 5 Therefore, flexible structures received outstanding attention among researchers owing to the aforementioned properties. However, the use of flexible structures frequently leads to excessive vibration when exerted with external disturbances, which ultimately causes random errors and structural failure. Hence, it is necessary to cancel or reduce the vibration experienced by the system. The flexibility of the structure has drawn scholars into developing a reliable control approach to address this situation.
Passive and active are two primary vibration control methods reported in the research platform to suppress such disturbances. Passive vibration control (PVC) is a classic approach in canceling vibration by utilizing spring, mass, and damper. Active vibration control (AVC), in contrast, uses intelligent components like sensors, and actuators on a structure to mitigate the effects of unwanted vibration. The implementation of sensors can boost the system’s accuracy due to its ability to match the actual system output with a reference signal. Additionally, the controller also contributes significantly toward achieving the targeted outputs. Despite the rapid development of automatic control theory in the industry, the employment of proportional-derivative-integral (PID) controller is still in its infancy owing to its inferior design and low tuning flexibility. 6 It is preferred because it offers many additional benefits, including inexpensive installation, robust destructive interference, and higher stability. 7
Despite being widely utilized in studies, PID controllers are frequently criticized by the industry, particularly for non-linear systems because of the uncertain impact experienced by the plate like high payload and changes in the operating environment. 8 Jiang and his team (2017) claimed that identifying the appropriate PID controller parameters is extremely challenging. 9 According to Habibi and his friends (2018), the aforementioned controller needs to be tuned using a trial and error approach, where the values of k p , ki, and k d need to be tuned manually, resulting in high computational time. 10 Therefore, PID tuning techniques always become the main concern when developing control systems. Generally, the two most popular approaches to obtain PID parameters are classical and optimization. 11
Control engineers frequently utilize analytical and empirical methodologies which are part of classical approaches available in literature. Ziegler-Nichols (ZN) and Cohen-Coon are two examples of the tuning techniques that are often published in this research area. 12 However, due to computational constraints experienced by mathematical calculation, including complicated derivatives and vast amounts of necessary enumeration memory, researchers rely on swarm intelligence algorithms (SIA) on simulations and stochastic optimization technique to yield the best outcome. Swarm intelligence algorithms are extremely useful in tackling different kinds of complex real-application issues, making it possible to discover appropriate, all-encompassing solutions in a realistic time span with higher accuracy and dependability compared to traditional search approach. 13 Hence, various scholars in most engineering backgrounds have reported fine-tuning PID controllers using particle swarm optimization (PSO), 14 genetic algorithm (GA), 15 bacterial foraging (BF), 16 and fireflies algorithm (FA). 17
The tremendous benefits of these optimization strategies have also attracted researchers’ interest in developing controllers to suppress vibration experienced by flexible structures. Hadi et al. (2020) utilized an artificial bee colony (ABC) to reduce vibration on a flexible plate structure. A vibration reduction of 47.54 dB attenuation at the first mode of vibration was accomplished in the research and the result outperformed a fuzzy-proportional-integral-derivate controller. 18 Additionally, Jamali et al. (2017) team proposed the use of PSO in finding the values of k p , k i , and k d for vibration suppression on a flexible manipulator. An outstanding result using the evolutionary algorithm in the controller was reported. 19
In this research, a self-tuning PID controller utilizing a crow search (CS) algorithm was proposed to find the optimum values of k p , k i , and k d . The parameter gain was to achieve the highest attenuation level at the first mode of vibration on the flexible plate structure. The structure was represented using discrete transfer function obtained from a simulation environment based on system identification approach. The main contribution of the proposed work lie within the following: (1) the actual input-output vibration data for the flexible plate structure was acquired from an experimental study based on a horizontal flexible plate rig; 20 (2) it is essential that the PID-CS technique control strategy should be capable in improving non-linear system stability and vibration suppressing exerted on the flexible plate structure; (3) the comparison between classical and intelligence-based approach known as PID-ZN and PID-CS, respectively; and (4) the ability of both approaches to suppress vibration under single and real disturbances.
Active vibration control
Superposition theory is a popular approach in vibration suppression of flexible structures which utilizes active vibration control (AVC). This theory introduced a secondary signal which has a similar magnitude but with different direction by using an actuator every time the sensor detects undesirable vibrations. In this research, the PID controller was utilized to control the vibration of a flexible plate. The transfer function obtained from the predicted model was used to represent the structure. In addition, the robustness of the developed model was validated using two types of disturbances known as single sinusoidal and real disturbances. Figure 1 shows the block diagram created in MATLAB Simulink for the PID controller development. Schematic diagram of proportional-derivative-integral (PID) controller using sinusoidal disturbance.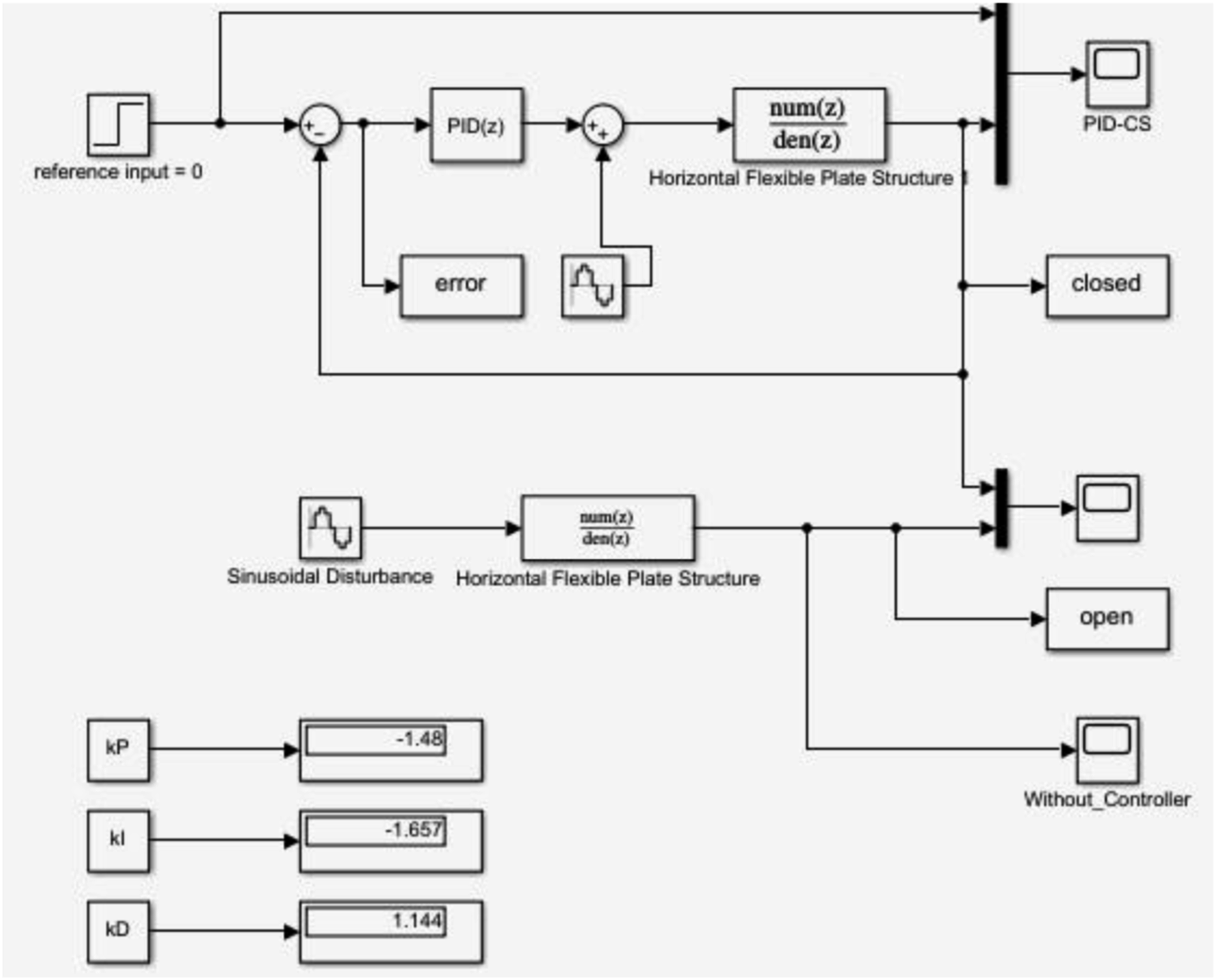
Optimization method for PID tuning
Self-tuning via crow search algorithm
The crow search (CS) algorithm is a global optimization approach inspired by crow behavior, which can be used to find the minimum value of mean squared error (MSE). Crows are among the most sophisticated species of birds, with the largest brain-to-body ratio of all birds. They employ tools to recognize the location of hidden food for a period of time. Each crow pursues the hidden food supply of another crow and steals it while the owner is away. As a result, every crow takes precautionary measures to secure its food in the best possible location.
The comprehensive approach was recommended by Askarzadeh (2016) following four basic principles outlined below:
21
• Crows gather in a cluster, and the population size is defined as flock size, N. • Crows remember the location of their hiding spot and stored it as memory, m. • Crows choose and follow one of the other crows in the swarm to steal their food. • Crows protect their food from being stolen by probability.
The utilization of the CSA for self-tuning PID-CS is discussed as follows: 20
Initially, the optimization problem and decision variables were defined. In this study, the decision variable was set at 3, which represents the values of k
p
, k
i
, and k
d
. After that, the adjustable CSA parameters including flock size (N), awareness probability (AP), flight length (fl), lower (LB) and upper boundaries (UB) and a maximum number of iterations (iter
max
) were valued. The lower and upper boundaries are the crows’ exploration range in obtaining the best possible solution. For example, if the [LB, UB] ϵ [−4, 4], hence, the crows will explore from the lower bound, LB = −4 and upper bound, UB = 4.
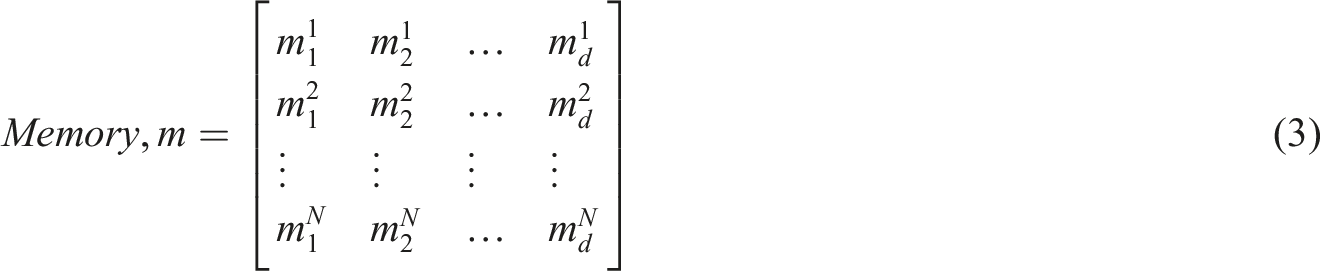
The location of the crows is specified randomly within the stated range. The values were obtained randomly by using equation (1). After that, a memory of the crow is initialized. The initial values of the memory are considered to be the same as the current position as they have no prior experiences. Equation (3) shows the matrix form of memory in a dimensional search space.
21
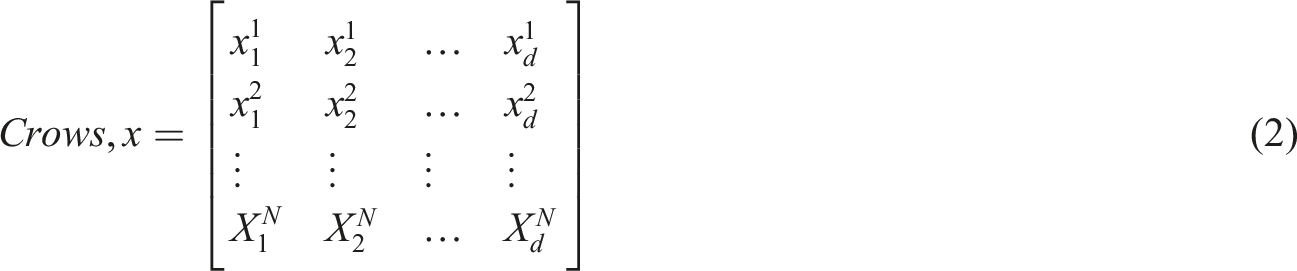
The calculation above only reflects the first flock, and it is repeated with subsequent flocks (in this example, the calculation is repeated 3 times with different random numbers). These values can be presented in the matrix structure as denoted in equation (2). For numerical examples, the values for the first flock are displayed in the first column of the matrix. In addition, since the memory at the initial phase is the same as the position of the crows’ value, therefore,


The reliability of each crow location is calculated by integrating the decision variable values into the objective function. In this study, the objective function is to find the minimum MSE value. The fitness function for each flock is calculated and compared. The flock with the lowest values among the 3 flocks is selected as f
min
. For example, if each fitness function obtained for a crow is shown in Table 1, hence the current best solution is found at flock 1 with f
min
= 0.0013 since it has the lowest fitness value.
Examples in choosing the initial best solution.

The next stage is the generation of the crows’ new position. At this stage, by assuming a crow j visits its hiding spot, m
j,iter
on an iteration, iter and another crow (for instance, crow i) secretly follow the crow j to that spot. There are two possible conditions for this situation:
21
(i) Crow j is unaware of the attendance of crow i at its place m
j,iter
, resulting in crow i entering crow j hiding spot. In this case, the current location of crow i is computed as follows (4):
21
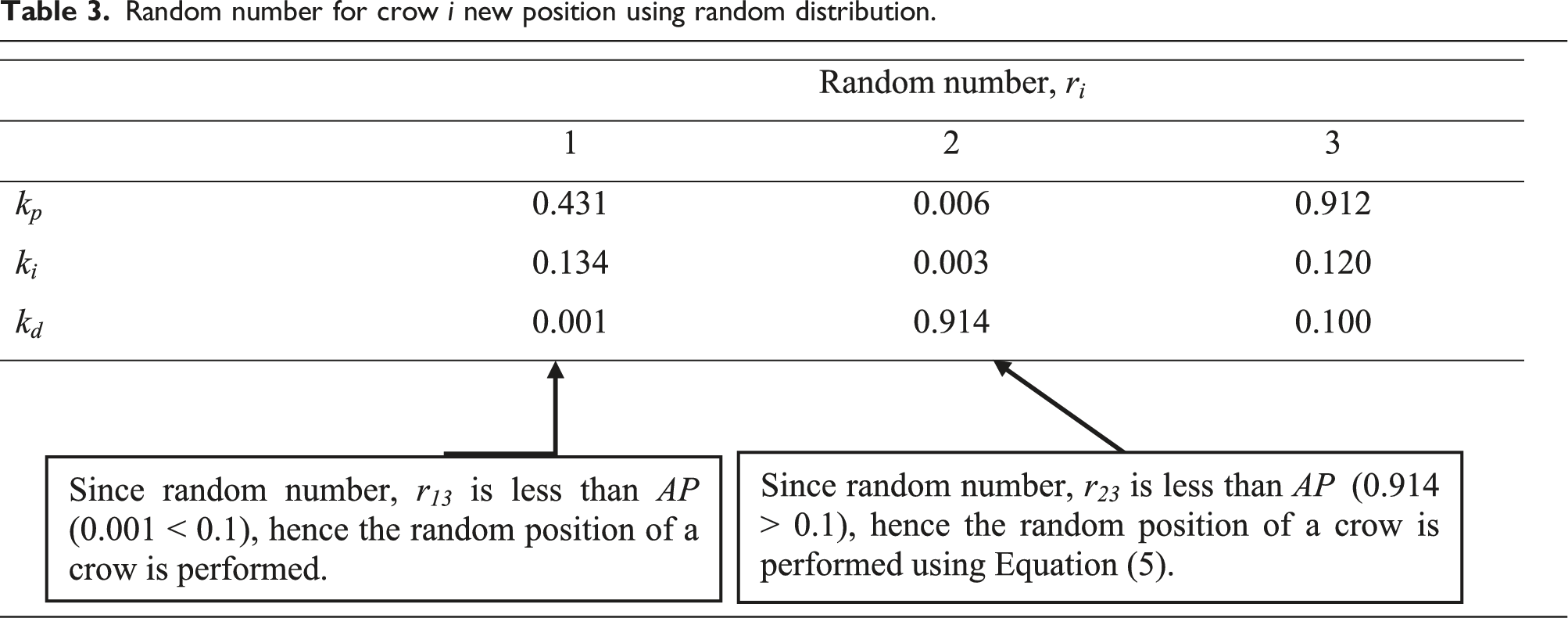
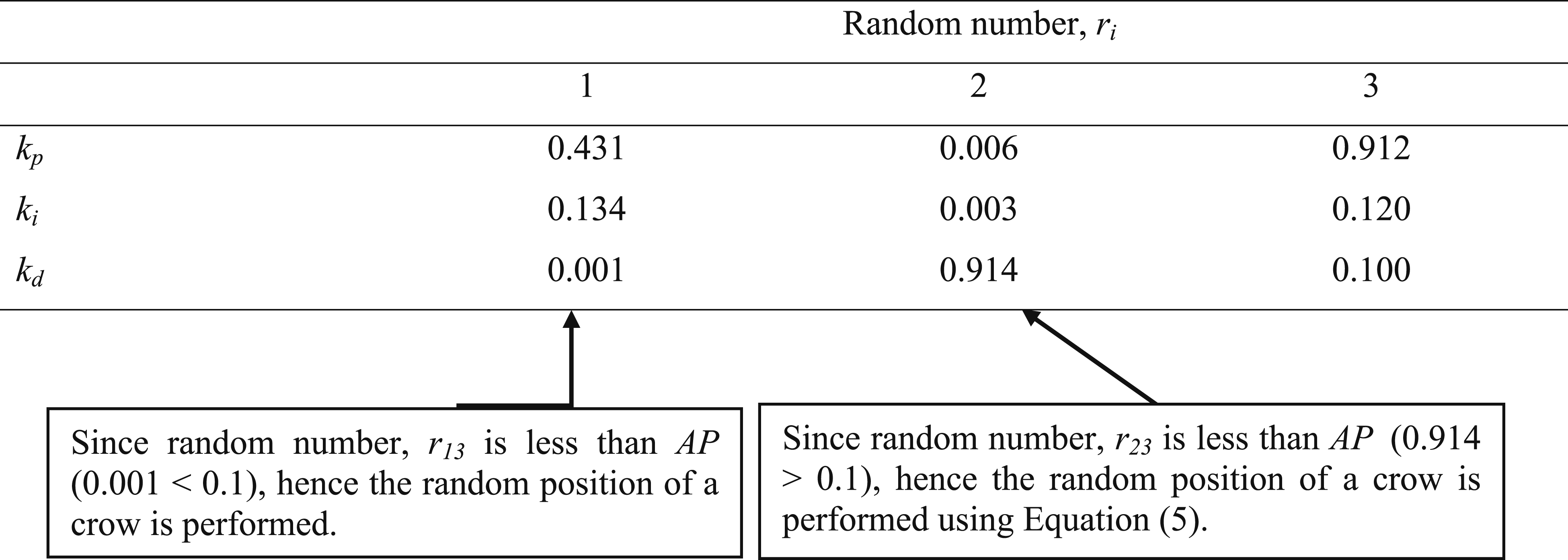
(ii) Crow j becomes aware that it has been followed by crow i. Hence, it deceives crow i by traveling to a different position in the search space, ensuring that its hiding spot remains secure. Conditions 1 and 2 can be described as (5): The following calculation was performed to show the process in stage 4. Initially, by assuming the crow j hidden location is as follows; Table 2 Next, a random number between 0 until 1 is placed in each flock and a comparison was made with the AP value. After that, at any random number that is greater than the AP value, the crow will update its memory using equation (3). Otherwise, the crows’ new position is placed randomly. For example, let AP = .1 and the random number of all flocks is tabulated as Table 3. The current memory of crow j which satisfies condition 1 will be updated by substituting the required values in equation (5). Therefore, the new position of crow j at


Random position of crow j followed by crow i.

Random number for crow i new position using random distribution.
The generation of the new positions is checked. If the solution is feasible, replace the crow position with a new one. Otherwise, the position is not updated.
The new position of each crow is evaluated by measuring its fitness function. For example, the new fitness function is presented in Table 4, hence, the best new solution is found at flock 3 with f
min
=
Examples in choosing the new best solution.

The crows update their memory as follows (6): Now, by comparing the fitness values in Tables 5 and 6, the memory of the crow will update according to the rules. Since all new positions achieved better fitness value compared to memorized position, hence, all crows will update their memory with a new position as calculated at stage 4 as follows;
Comparison of fitness value between the initial and new position.

Updated position of a crow after evaluation.

The stages from 4 until 7 are performed until iter
max
is achieved. The optimization task is completed after the termination condition is satisfied. From a numerical example, let iter
max
= 5, and problem dimension =3. After the generation of the new positions of all crows is done 5 times, the optimization task will stop from finding new solutions. Hence, the final result for 5 iterations can be seen in Table 7. After completing the 5th generation, best fitness = The best solution is replaced in the PID block diagram and the vibration reduction is observed. The pseudocode and flowchart of optimization task using CS is illustrated in Figures 2 and 3;
21
Generation of new position until 5th iterations.

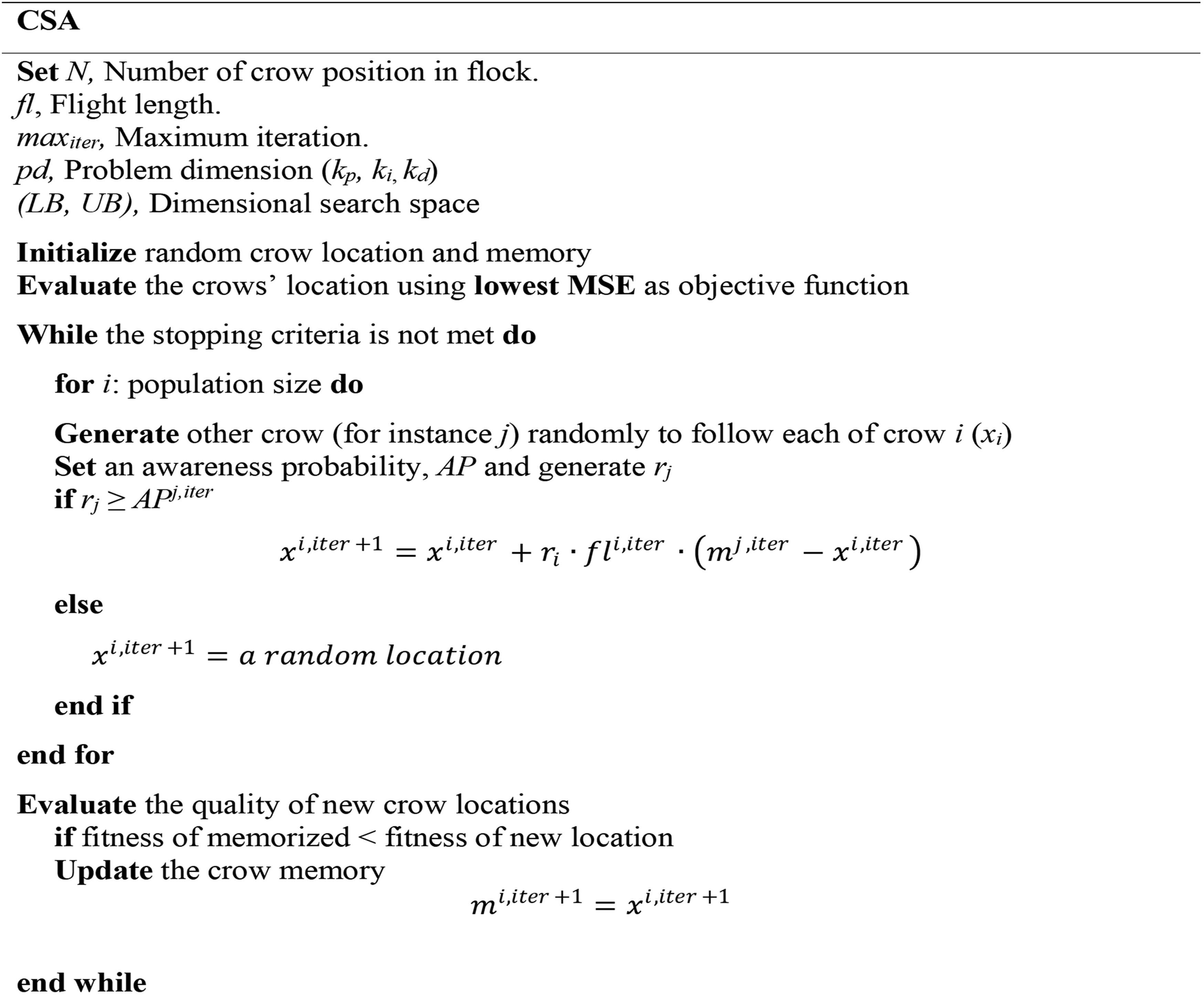
Pseudo code of CSA for searching PID gains. 21
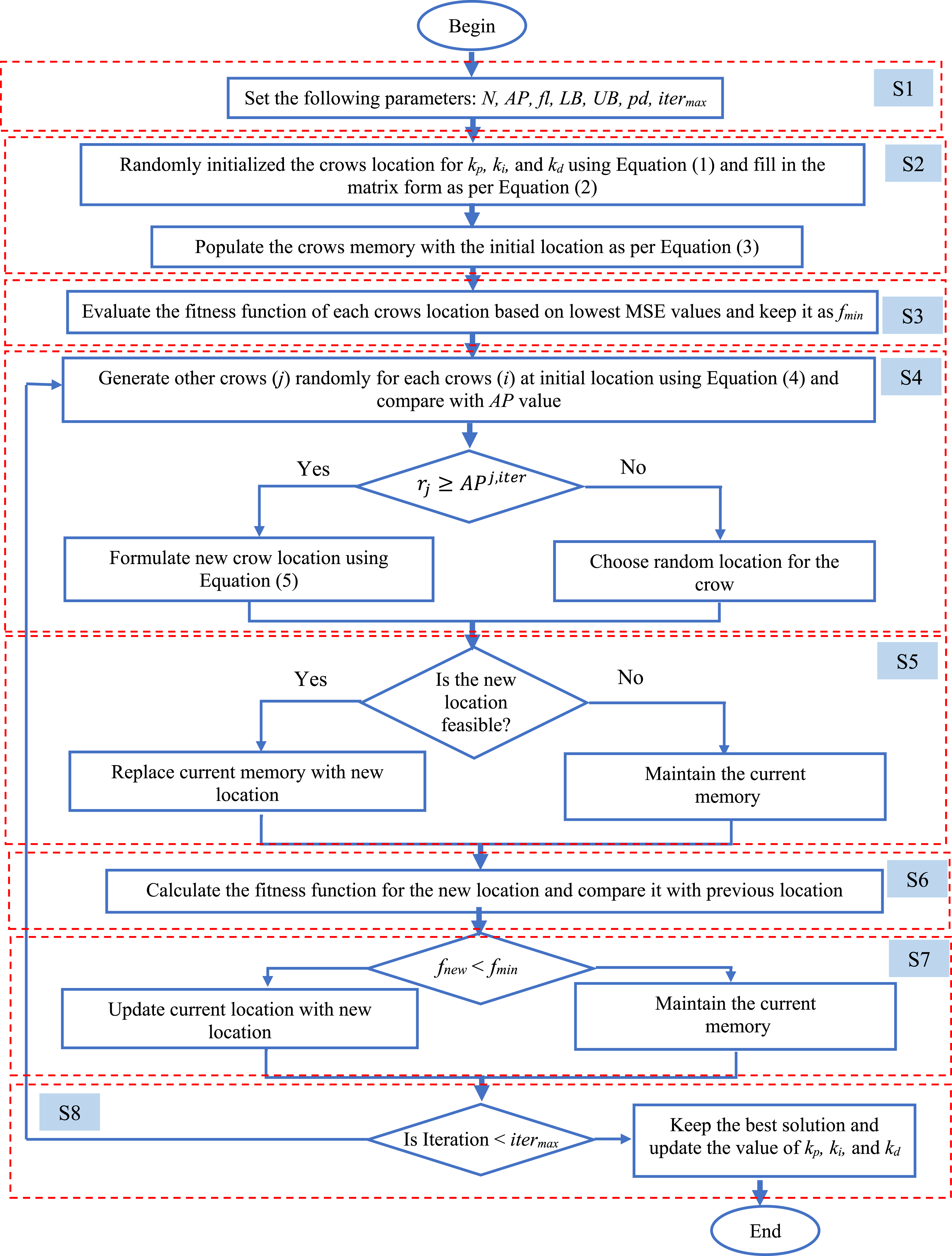
Flowchart of CSA for searching PID gains. 21
Simulation outcomes and discussion
In this section, the development of the PID controller is introduced. The robustness analysis of the controller was observed using MATLAB/Simulink R2018a. Two types of PID controllers were developed, namely, PID-ZN and PID-CS. In order to test the effectiveness of the controllers, sinusoidal and real disturbances were tested during the analysis. The analysis started with a single sinusoidal disturbance in the system. Amplitude and frequency of 4 V and 2.279 Hz was set, respectively, to represent the disturbance. After that, the test shifted to a real disturbance to ensure that the controller can control the system under any condition. The predicted model developed using swarm intelligence algorithm in the form of discrete transfer function as shown in equation (7) was implemented to represent the properties of horizontal flexible plate structure.
Comparison between PID-ZN and PID-CS under different types of disturbances
Single sinusoidal disturbance
The PID parameters obtained using the ZN method.

In the CS tuning process, five parameters were tuned heuristically, including the number of iterations, population size, lower and upper boundaries, awareness probability and flight length. Although most research papers claim that CS consists of only two significant parameters, this study tuned all the parameters to validate these statements. Based on the literature review, some implementations use different values for population size, awareness probability and flight length.22,23 On the other hand, Adhi et al.
24
and Majhi et al.
25
tuned the lower and upper boundaries for their applications. Due to the inconsistencies of the parameter settings in previous works, all parameters were considered and observed in this analysis. Sensitivity analysis was performed to analyze the best option for the suggested optimizer parameters and to evaluate the impacts of adjusting those parameters.
26
The result of the sensitivity analysis for all five parameters were illustrated in Figure 4. The graph indicates that the tuning parameter with the lowest MSE values will be chosen as a variable in the optimization process. Sensitivity analysis for CS parameters: MSE against (a) number of populations (b) awareness probability (c) flight length (d) boundary (e) number of iterations.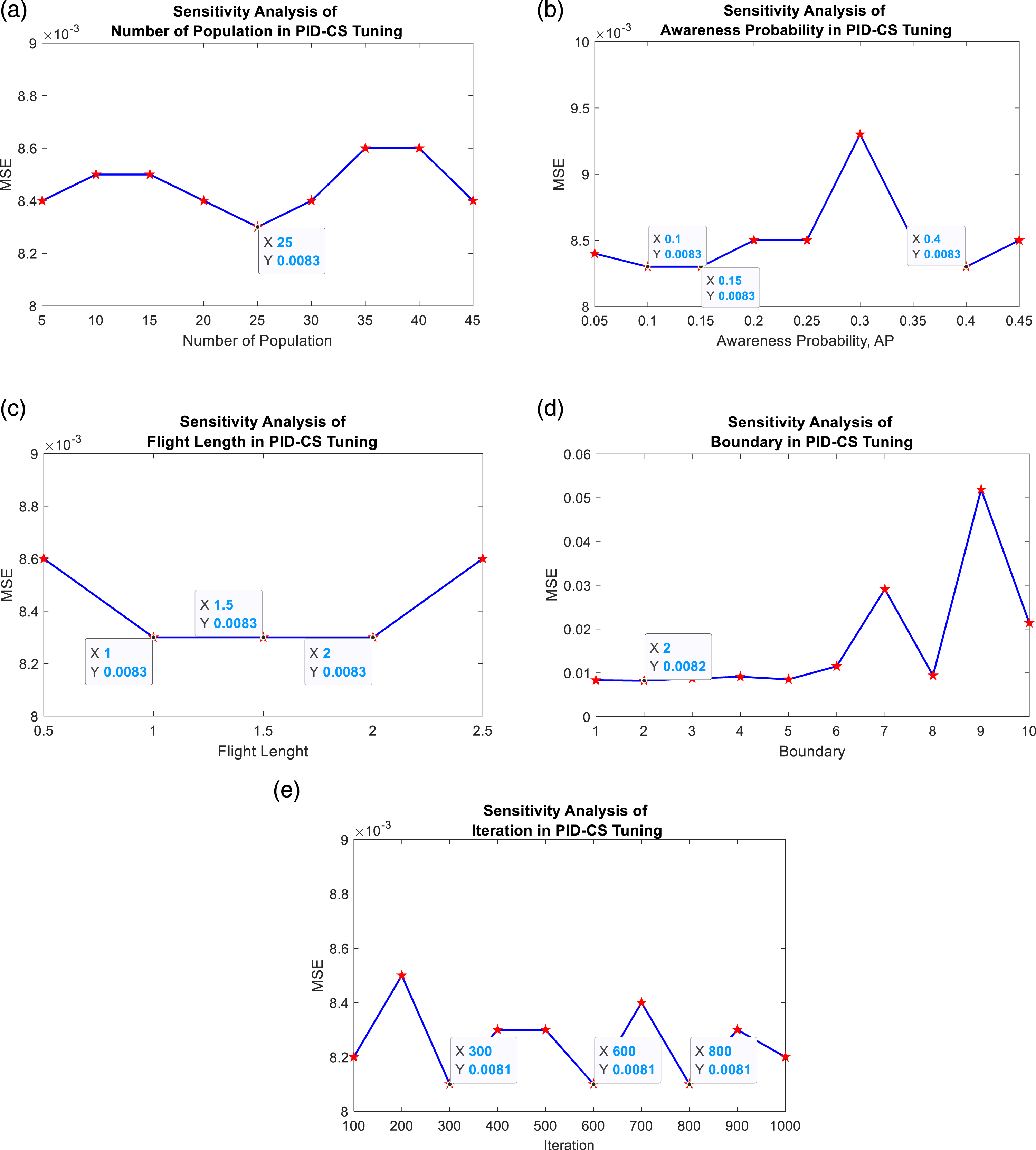
Varying and the optimum values of PID-CS tuning.

Set of PID-CS parameters.

The analysis reported that the PID-ZN controller achieved a higher attenuation rate of 67.54 dB at the first mode of vibration, which is approximately a 35.60% reduction compared to the uncontrolled system. The flexible plate had an attenuation value of 104.8 dB before the controller was introduced. The system managed to achieve an attenuation value of 37.26 dB after the implementation of the PID-ZN controller. Meanwhile, the PID-CS controller under a single sinusoidal disturbance managed to attenuate 44.75 dB which is equivalent to a reduction of 42.7%. The attenuation result of the PID-ZN and PID-CS controllers under single sinusoidal disturbance in time and frequency domains is highlighted in Figure 5. Furthermore, the PID-CS controller demonstrated a significant difference in the attenuation level at the first mode of vibration when compared to the heuristic tuning parameters carried out by previous research work, indicating that the intelligent method yielded promising results.
28
The comparison between PID-ZN and PID-CS to attenuate the vibration at the first mode is tabulated in Table 11. In order to ensure the robustness of the controllers developed, the system was verified by exerting real disturbance and the ability of PID-ZN and PID-CS to mitigate this was analyzed. The PID parameters obtained from single sinusoidal is maintained in this validation. The PID-CS and PID-ZN controllers under single sinusoidal disturbance in (a) time domain (b) frequency domain. Comparison between PID-ZN and PID-CS under single sinusoidal disturbance.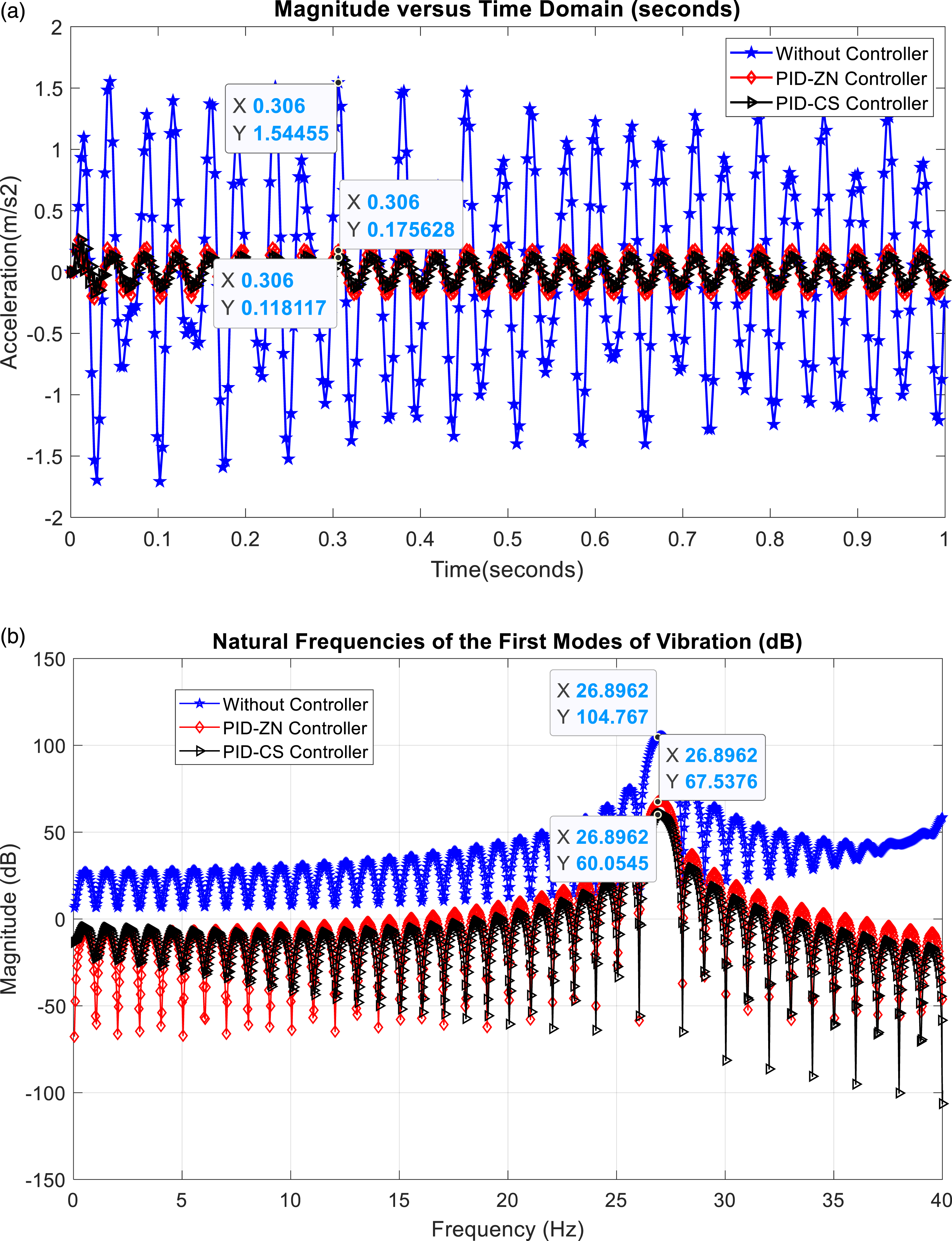

Real disturbances
A robust controller ought to reduce undesirable vibrations under any conditions. Thus, the simulation was then performed with real disturbances to validate the controllers’ capability.
28
Based on the outcomes, both PID-ZN and PID-CS managed to reduce the vibration at the first mode with an attenuation value of 35.19 and 42.74 dB, respectively. Thus, the self-tuning PID-CS was able to attenuate more than the PID-ZN controller. Moreover, the reduction percentage for PID-CS controller under single sinusoidal and real disturbances were 42.7 and 81.2%, respectively. This analysis reveals that the intelligence-based controller was capable to minimize vibration at any situation. Additionally, employing swarm intelligence algorithm, namely, PID-PSO and PID-ABC, Hadi et al. successfully attenuated 47.24 and 47.49 dB, respectively under real disturbance.
29
The comparison was conducted using the same experimental setup and frequency applied to the system. Figure 6 demonstrates the attenuation results of the PID-ZN and PID-CS controllers under real disturbance in time and frequency domains. The outcomes based on the real disturbance is highlighted in Table 12. The PID-CS and PID-ZN controllers under real disturbance in (a) time domain (b) frequency domain. Comparison between PID-ZN and PID-CS under real disturbance.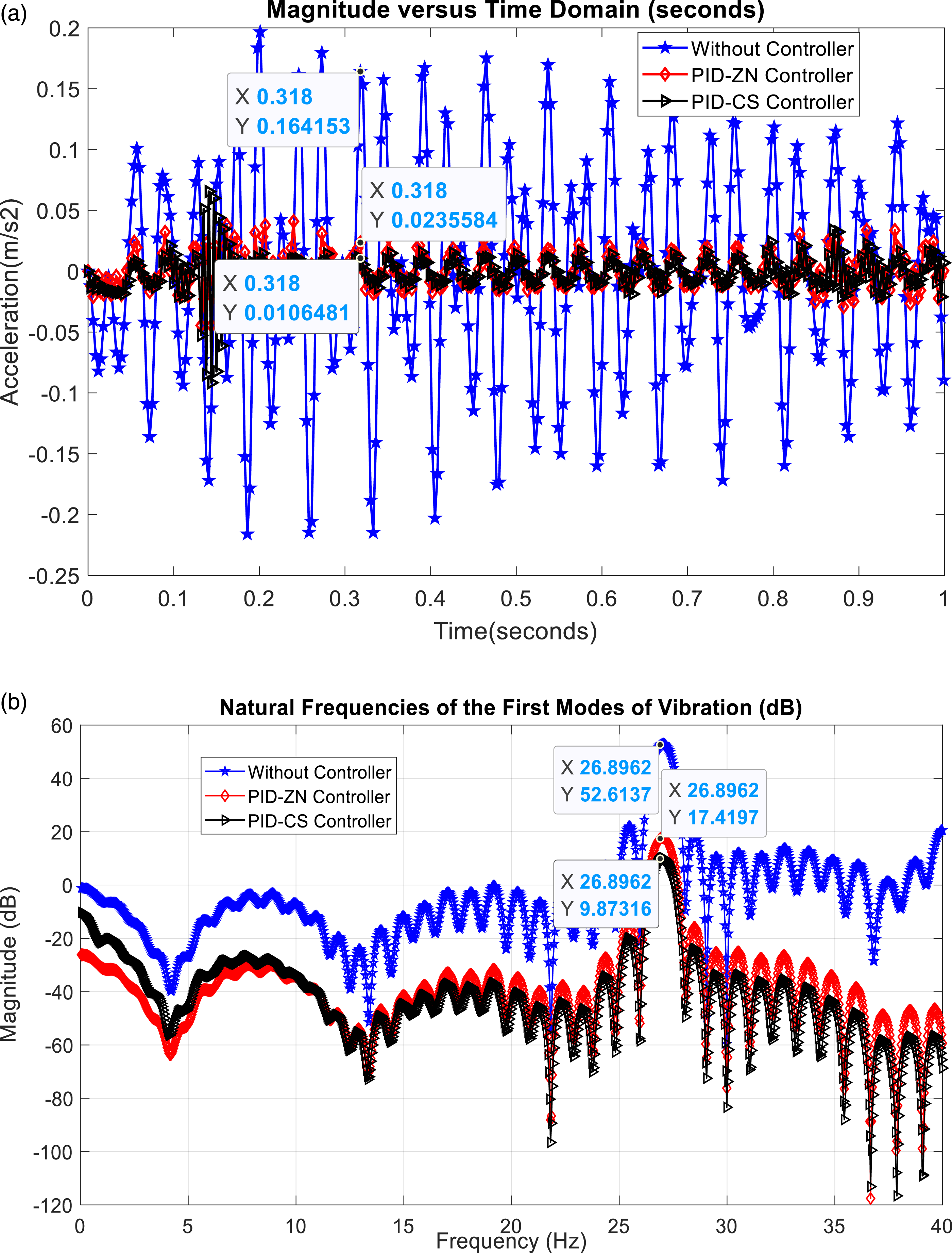

From the presented analysis, it was evident that the proposed PID-CS controller in this study produced satisfactory results compared to classical tuning approach via ZN. Owing to its deterministic nature, PID-ZN was unable to compete with PID-CS because it will always yield the same output when given a reference input. 30 Hence, the capability of PID-CS to explore the best possible solutions by adjusting to the changing environment and dynamics within search spaces gives it merit.31,32 This is due to the fact that CS will perform several iterations before settling on an optimum parameter.
Conclusions
This paper evaluated PID tuning methods using classical and self-tuning approaches, namely, ziegler-nichols (ZN) and crow search (CS) algorithm, respectively for vibration suppression on a horizontal flexible plate structure. The predicted model using CS in the form of a transfer function was implemented during the PID controller development. The three search dimensions of k p , k i , and k d parameters were described in detail in this paper. The self-tuning parameters using PID-CS was obtained via a single objective function, which was based on the lowest MSE. The PID-ZN and PID-CS controllers were compared using two types of interferences, which are single sinusoidal and real disturbances. It is worth noting that the PID-CS was a more robust controller since it managed to reduce vibrations at the first mode by 42.7 and 81.2% for single sinusoidal and real disturbances, respectively. Hence, the aim of this study to simulate a PID controller tuned by SIA using CS for vibration cancellation on a horizontal flexible plate structure was accomplished. Nonetheless, various future works can be carried out to improve this research field such as obtaining PID parameters using hybrid algorithm, combining the CS with other SIA like glowworm swarm optimization (GSO), spotted hyena (SH) and whale optimization algorithm (WOA). In addition, the system’s output response can be improved by utilizing a Fuzzy environment with a proposed control scheme to update the control gains.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the FRGS-RACER Grant (RACER/1/2019/TK03/UITM//1).