
Abstract
Impact force identification has always been of significance for structure health monitoring especially on the applications involving composite materials. As a typical inverse problem, impact force reconstruction and localization is undoubtedly a challenging task. The well-known ℓ1 sparse regularization has a tendency to underestimate the amplitude of impact forces. To alleviate this limitation, we propose an accelerated generalized minimax-concave (AGMC) for sparse regularization that employs a non-convex generalized minimax-concave (GMC) penalty as the regularizer and incorporates an acceleration technique to expedite the attainment of the global minimum. Compared with the classic ℓ1-norm penalty, the GMC penalty can not only induce sparsity in the estimation, but also maintain the convexity of the cost function, so that the global optimal solution can be obtained through convex optimization algorithms. This method is applied to solve the impact force identification problem with unknown force locations to simultaneously reconstruct and localize impact forces in the under-determined case utilizing a limited number of sensors. Meanwhile, K-sparsity criterion is used to adaptively select regularization parameters by taking advantage of the sparse prior knowledge on impact forces. Simulations and experiments are conducted on a composite plate to verify the computational efficiency and robustness of the AGMC method in terms of impact force reconstruction and localization, particularly in the presence of noise. Results demonstrate that the proposed AGMC method achieves faster convergence and provides more accurate and sparse reconstruction and localization of impact forces compared to other state-of-the-art sparse regularization methods.
Keywords
Introduction
Composite materials are widely used in the mechanical engineering fields, especially in aeronautical structures due to their excellent properties such as high specific stiffness and specific strength. 1 However, they have the disadvantage of poor impact resistance. Composite structures are susceptible to barely visible impact damage (BVID) such as debonding and delamination when impacted by foreign objects such as birds, rocks, and hail. 2 If left undetected, BVIDs can pose a significant threat to the integrity of the structure, potentially leading to operational issues and irreversible damage. 3 Impact force identification is an important technique that can aid in quickly identifying where impact damage has occurred and help assess the structural integrity of composite structures. Therefore, identifying impact forces acting on composite structures, including reconstructing their time histories and localizing impact positions, is crucial for assessing the structural integrity and detecting any potential damage. Considering the impracticality of directly measuring impact forces at unknown locations using force sensors, measurable structural responses are instead utilized for inverse solving of the impact forces. Then, many methods have been developed for addressing this typical inverse problem of impact force identification. 4
To mitigate the highly under-determined and unstable nature of the highly ill-conditioned inverse problem of impact force identification, regularization techniques are commonly utilized. 5 Tikhonov regularization method is one of the classical methods for the inverse problem. Jacquelin et al. 6 compared generalized singular value decomposition (GSVD), Tikhonov, and TSVD methods to reconstruct impact forces imposed on an aluminum plate in time domain, and stated that the condition number of the transfer function is influenced by the position of measuring points. Li et al. 7 employed the Nelder–Mead method for force localization and subsequently utilized Tikhonov regularization for the reconstruction of their time histories in a cantilever beam with two accelerometers. Yan et al. 8 realized impact force identification with two nested loops, that is, an outer loop to localize the impact force with a non-linear unscented Kalman filter, and an inner loop to reconstruct the time-history with Tikhonov regularization. Although ℓ2 regularization methods are straightforward and practical, their performance for impact force identification is typically unsatisfactory when dealing with under-determined sensor placement cases.
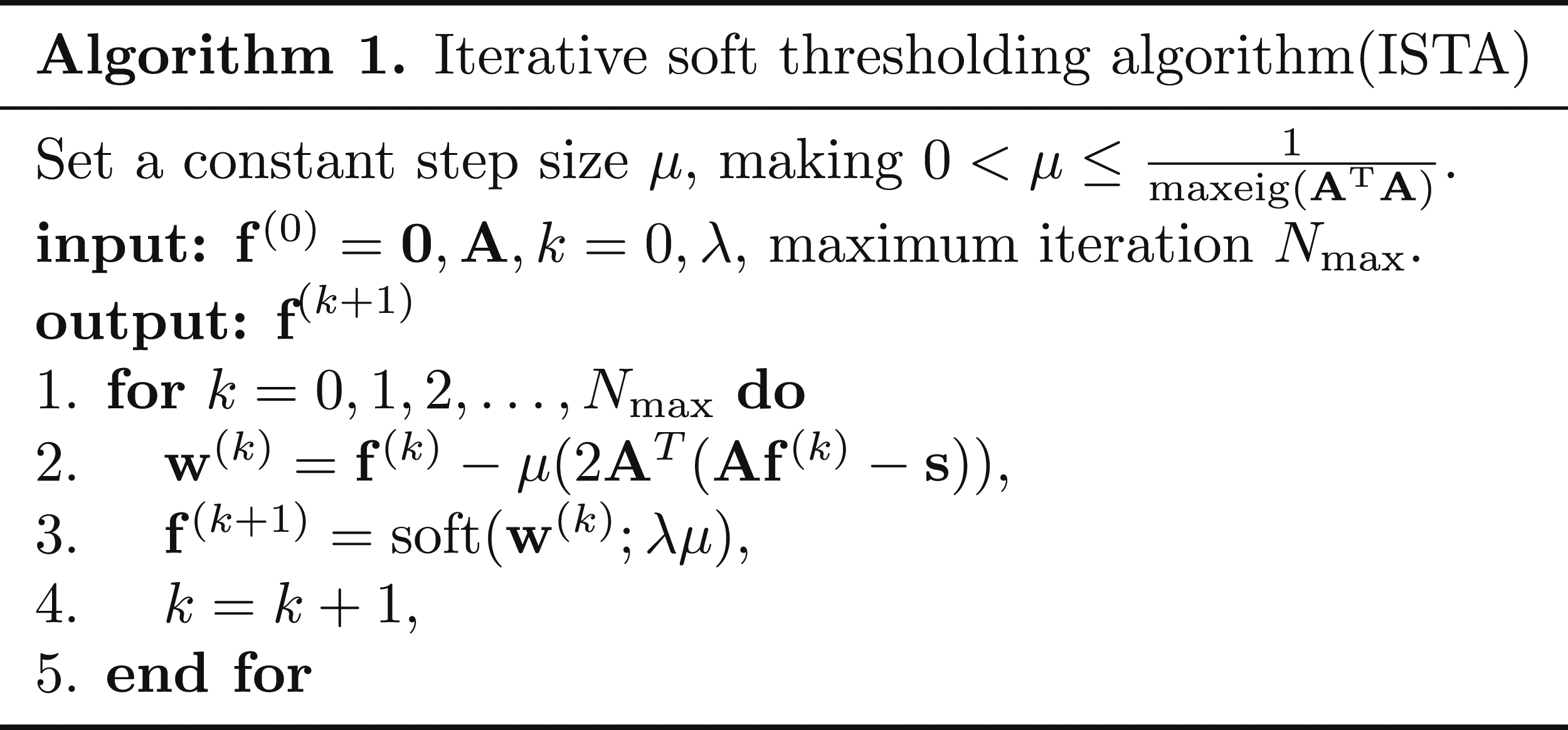
As the research interest in sparse regularization methods grows, some scholars have shifted their attention from traditional ℓ2-norm-based methods to solving cost functions utilizing the ℓ1 norm. This is due to the fact that ℓ1 regularization methods encourage solutions with a minimum number of non-zero values, which aligns with the sparse nature of impact forces in the joint time-space domain, thus making these methods to work well in the case of under-determined sensor configurations. 9 Since the ℓ1-norm minimization model is convex, it can be solved by convex algorithms, such as the gradient projection method, 10 the interior point method, 11 the stage-wise orthogonal matching pursuit method, 12 and the iterative soft threshold algorithm (ISTA). 13 Ginsberg et al. 14 proposed a method for simultaneous identification of impact locations and time histories of impact forces on a simple beam structure using direct deconvolution, which involved solving an extended ℓ1-minimization problem. Rezayat et al. 15 identified point forces imposed on a footbridge via a regularization method that combines ℓ1 and ℓ2-norms. Pan et al. 16 proposed a weighted ℓ1-norm regularization, and it performed better than the ℓ1-norm and Tikhonov regularization methods in identifying the moving force acting on a steel beam. Aucejo et al. 17 proposed a space-frequency multiplicative regularization method considering the sparsity of excitation sources in space domain and verified this method on a thin simply supported steel beam. Qiao et al. 18 proposed an enhanced sparse regularization method on the basis of reweighted ℓ1-norm minimization for impact force identification. While ℓ1 norm has been widely adopted for promoting sparsity in the solution of impact force identification problems, its effectiveness in achieving accurate estimates of impact forces is often limited and may lead to underestimation of force amplitudes. 19
In recent years, researchers have investigated the use of non-convex penalties in the impact force identification problem as a means of addressing the limitations of ℓ1 regularization and promoting sparsity. Chartrand et al.
20
indicated that non-convex functions such as ℓ
p
quasi-norm (0 < p < 1) exhibit superior sparsity-inducing capabilities compared to convex ℓ1 regularization, especially in cases where the number of measurements is limited. Aucejo et al.
21
proposed the incorporation of a local regularization term,
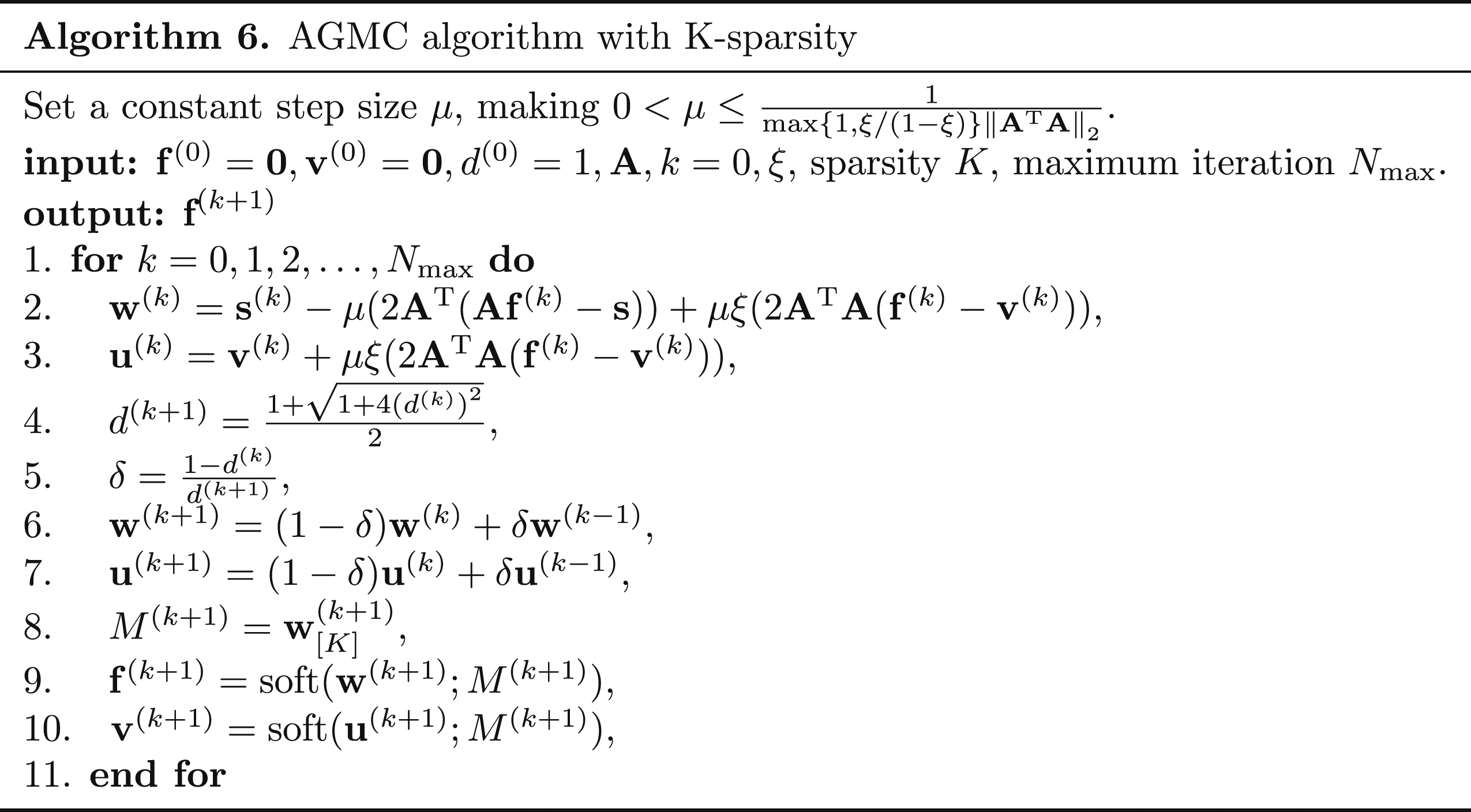
It is worth noting that in practical engineering problems, the locations of impact forces cannot be known in advance. Thus, the primary objective of this contribution is to address the challenge of monitoring a greater number of impact locations with a reduced number of sensors. This requires solving a large-scale under-determined inverse problem, which is a significant research problem in the field. Although the GMC method can considerably improve the accuracy of the amplitude estimation, it will suffer from a slow convergence when dealing with such a large-scale problem with a high-dimension transfer matrix. To the best of authors’ knowledge, the GMC method has only been used to solve the impact force identification problem in the even-determined case so far, as in Ref. 30 the application of the GMC method in the under-determined case has not been investigated. Therefore, we propose a novel impact force identification method named accelerated generalized minimax-concave sparse regularization (AGMC) to simultaneously reconstruct and localize impact forces at unknown impact locations in the under-determined case, which can provide a faster convergence rate and higher identification accuracy under the same iteration termination criteria. This method utilizes an acceleration strategy in solving the cost function including the non-convex GMC penalty, which not only inherits the advantages of the GMC method but also accelerates the convergence speed and improves the computational efficiency. The K-sparsity criterion is used to select the regularization parameter of this method.
The rest of this paper is organized as follows. The Dynamic modeling section briefly deduces the modeling problem for impact force identification. The Sparse regularization methods for impact force reconstruction and localization section describes the existing ISTA and GMC methods, derives the AGMC method, and uses the K-sparsity criterion to uniformly select regularization parameters for the three regularization methods. The Numerical verification section carries out numerical verification on a composite plate. The Experimental verification section verifies the AGMC method in an experiment on a composite plate with the similar parameters and constraints as the simulation. The Conclusions section concludes this paper.
Dynamic modeling
In the context of a linear time-invariant single-input single-output dynamic system, the convolution operation can be used to express the relationship between the input excitation and output response, which is

The continuous convolution model as presented in equation (1) can be discretized as


For the purpose of brevity and convenience, equation (3) can be compactly represented as

When impact forces are applied to various unknown locations on a structure, the corresponding responses from multiple positions are simultaneously recorded as

Equation (5) can also be concisely expressed as the following compact form

Sparse regularization methods for impact force reconstruction and localization
The impact force identification problem is a typical ill-posed problem. The condition number of the transfer matrix
ℓ1 sparse regularization method
Because equation (6) has infinitely many solutions in the under-determined case, additional constraints are needed to get a satisfactory solution. Considering that the most entries in



Generalized minimax-concave sparse regularization method
In order to improve the precision and sparsity of the solution, an alternative non-convex regularizer has been developed in this study to replace the ℓ1 norm. The cost function with the non-convex regularization term is generally expressed as

where ψ(

Meanwhile, considering a univariate case, we define a function g as One-dimensional examples of (a) penalties and (b) threshold functions.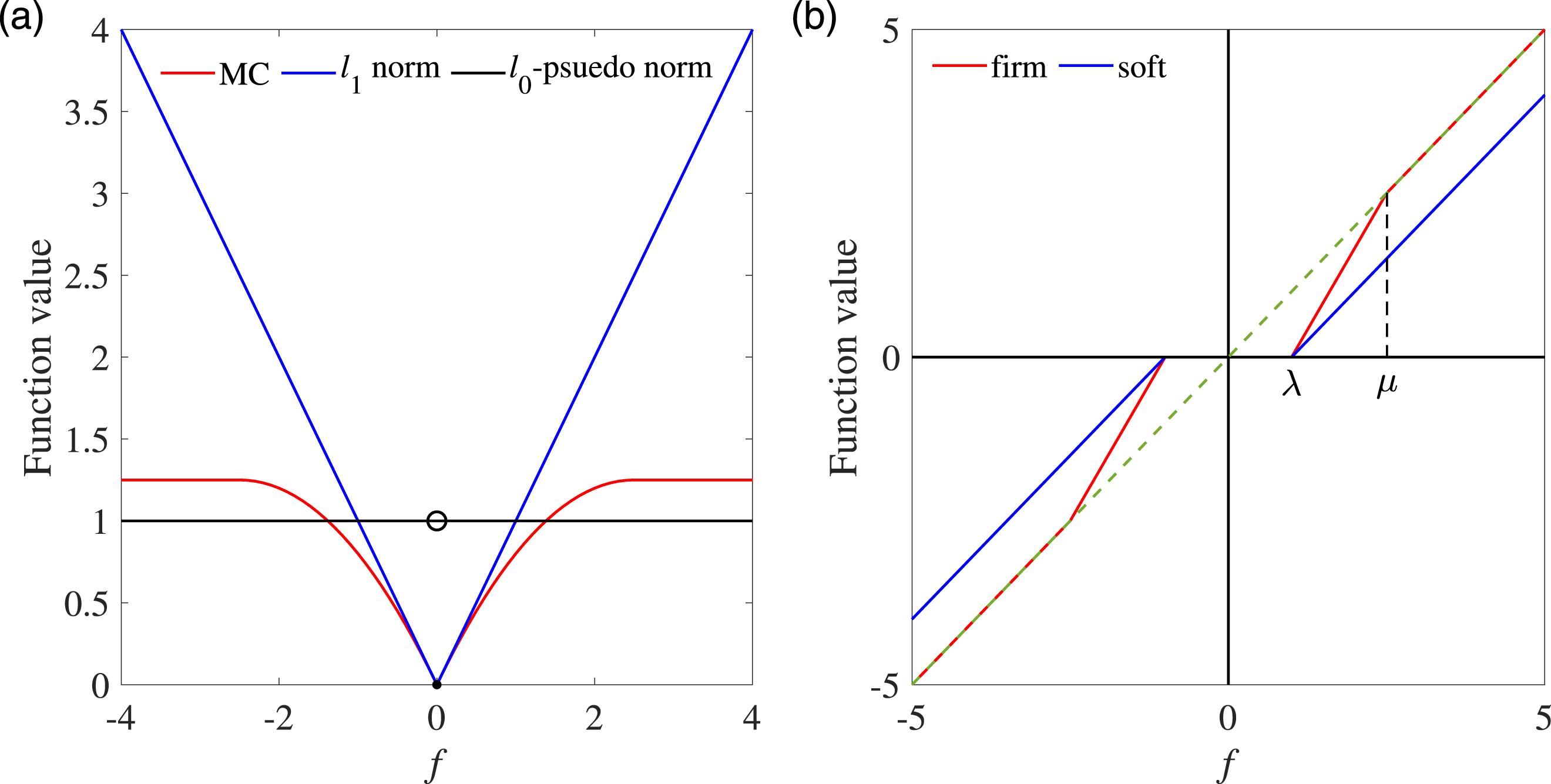


Equivalently, equation (11) can be written in a Moreau envelope form as
35

Next, extending the MC penalty in Equation (14) to a multivariate case, the GMC penalty is obtained, which is expressed as
23


Then, the two-dimensional GMC penalty graph and its corresponding contour figure are shown in Figure 2. It can be found that the GMC penalty is a nonvex function. Two-dimensional examples of (a) the GMC penalty scaled by the matrix 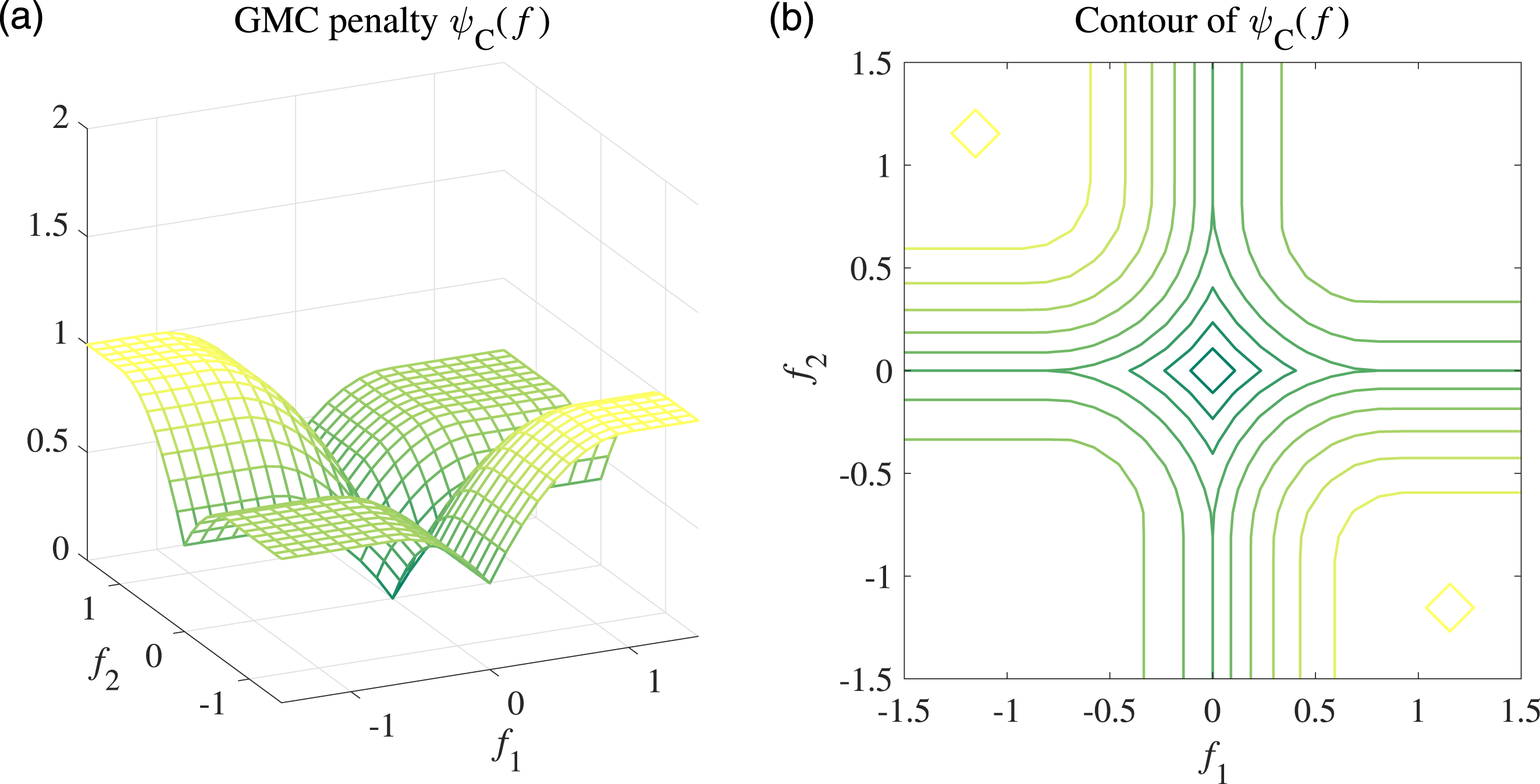
Substituting equation (15) into equation (10), one can get
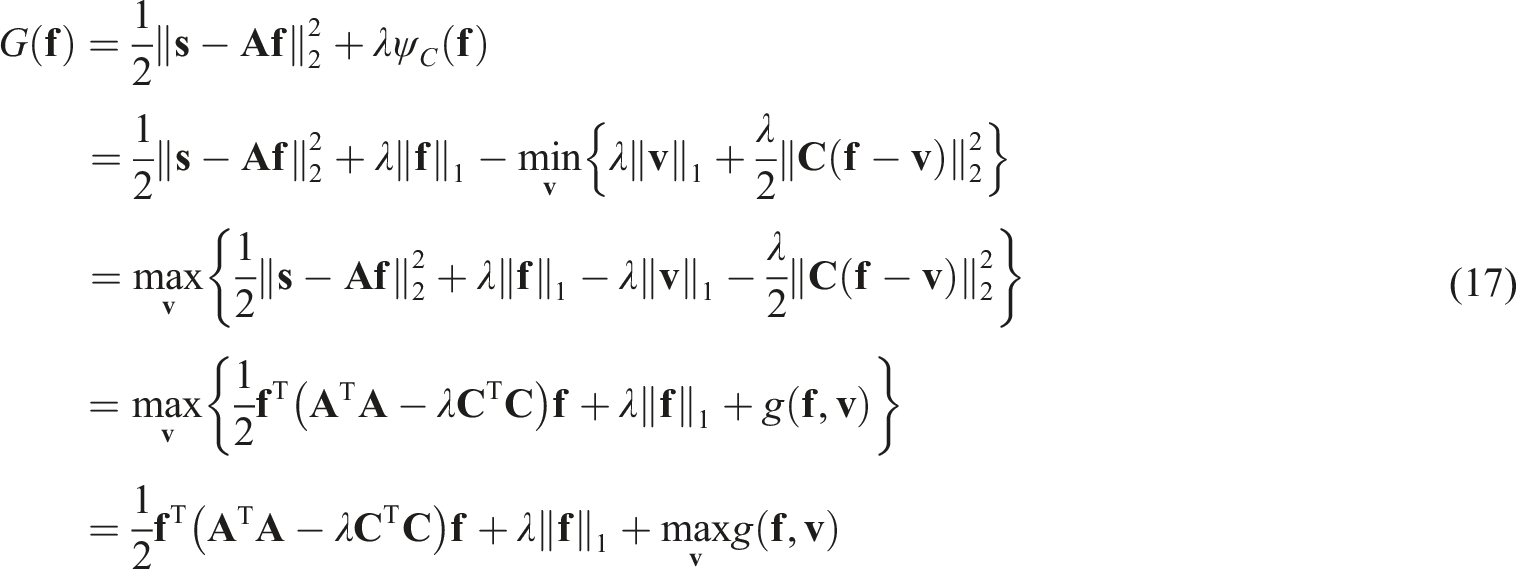


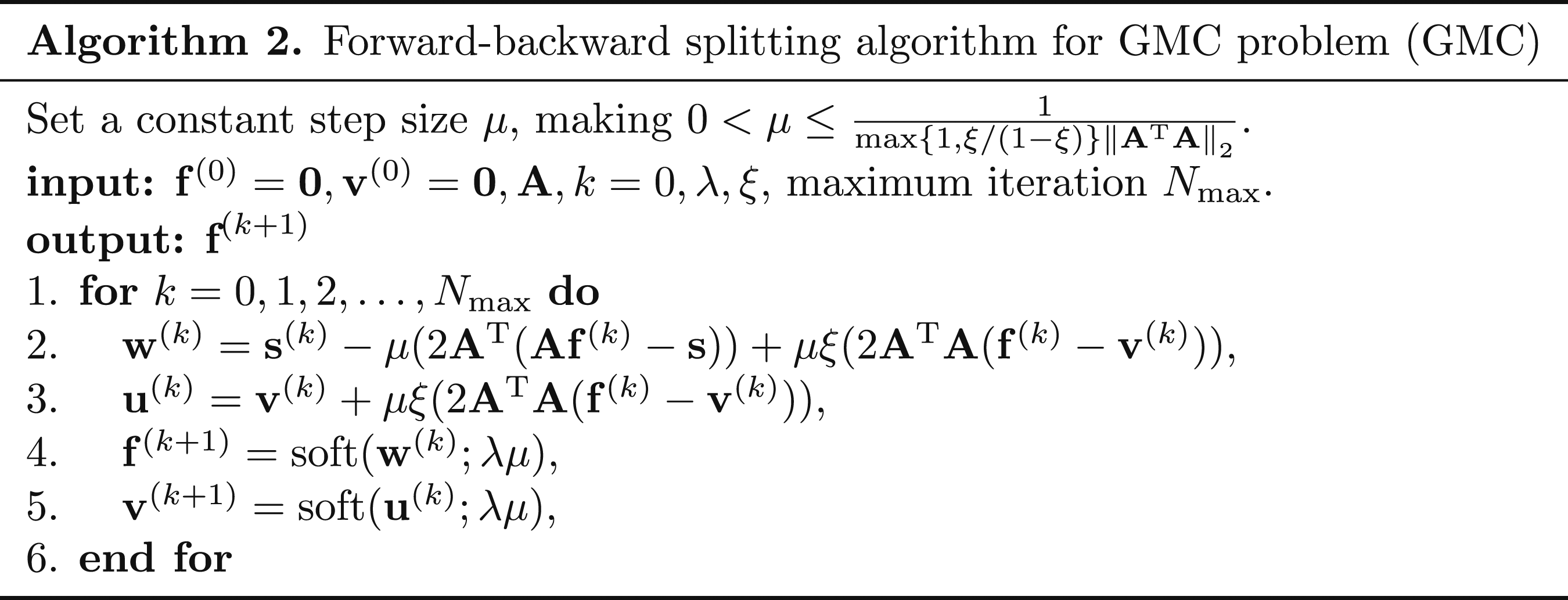
Due to the absence of an analytical solution to equation (17), obtaining the global optimal solution requires the use of proximal algorithms, such as the forward-backward splitting (FBS) algorithm.23,35 The convergence analysis has been presented in Refs.23,36 Consequently, the problem of solving equation (17) can be reformulated as a saddle point problem which exhibits convexity with respect to


It is proved that the GMC penalty can effectively bypass the amplitude-underestimation problem compared with the ℓ1-norm penalty.
23
There exist two time-consuming gradient descent steps in Algorithm 2, especially when the dimension of the transfer matrix
Accelerated generalized minimax-concave sparse regularization method
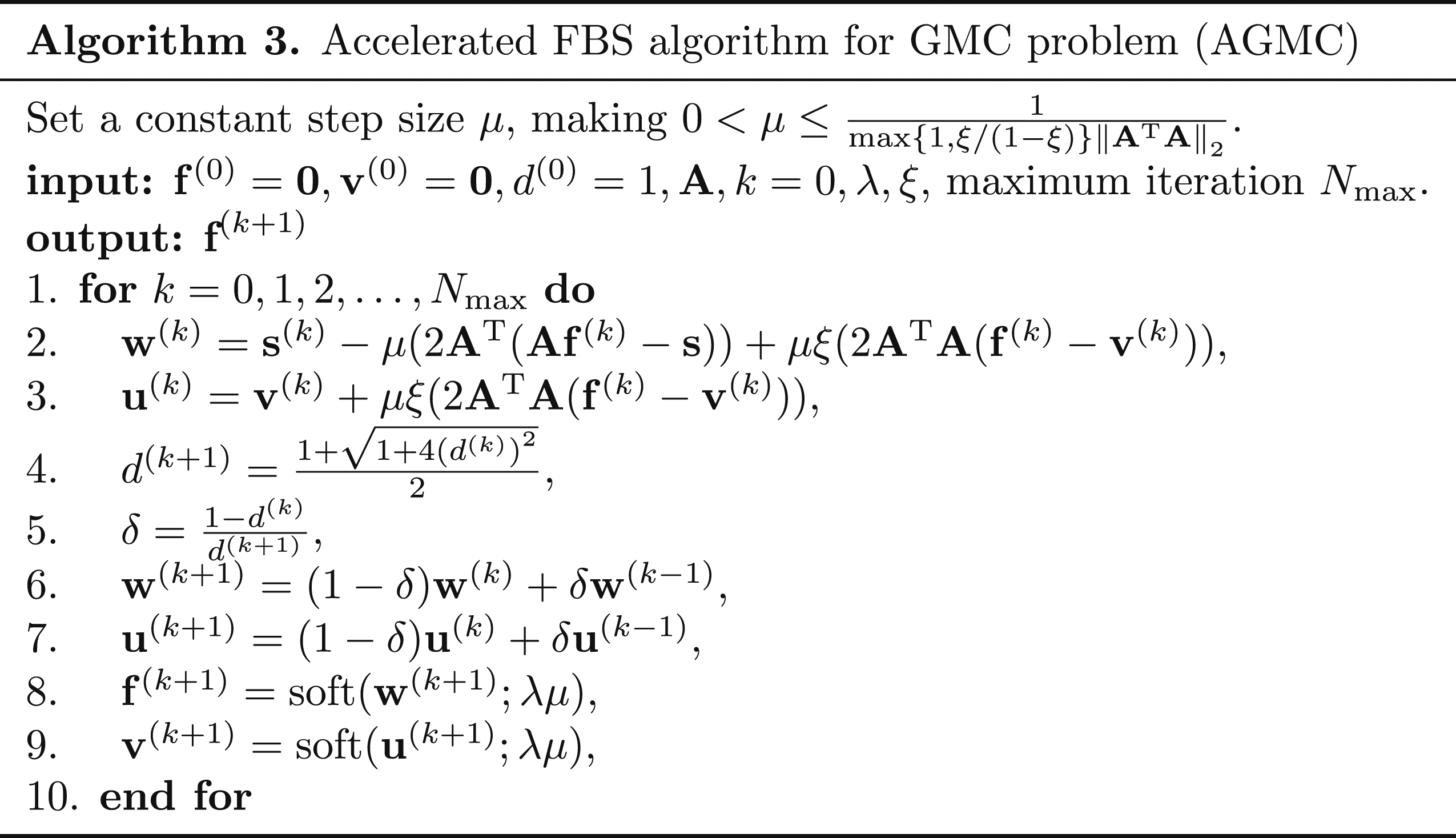
In light of the convex nature of the GMC regularized objective function, the Nesterov’s acceleration scheme is applied to the conventional GMC method to speed up convergence,37,38 thereby improving the computational efficiency of the solution. The idea of this technique is to find a better point to calculate the update point. We are to cover some details of the acceleration process here. According to the soft threshold update rule, the updating of



Using this acceleration scheme, Algorithm 2 can be improved to Algorithm 3 as shown below. The main difference between Algorithm 3 and Algorithm 2 is that the iterative shrinkage operator soft(·) is employed at the extrapolation points
K-sparsity criterion for the regularization parameter
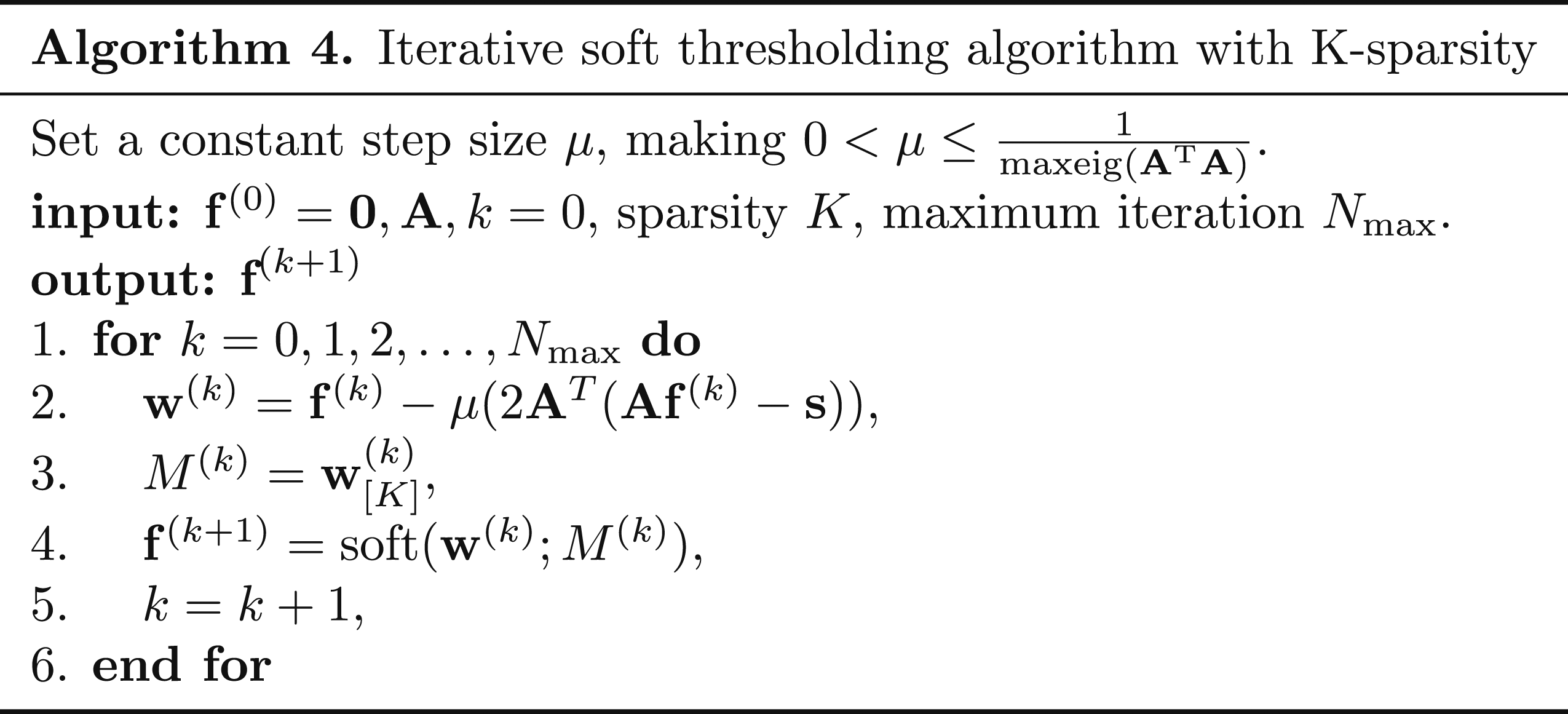
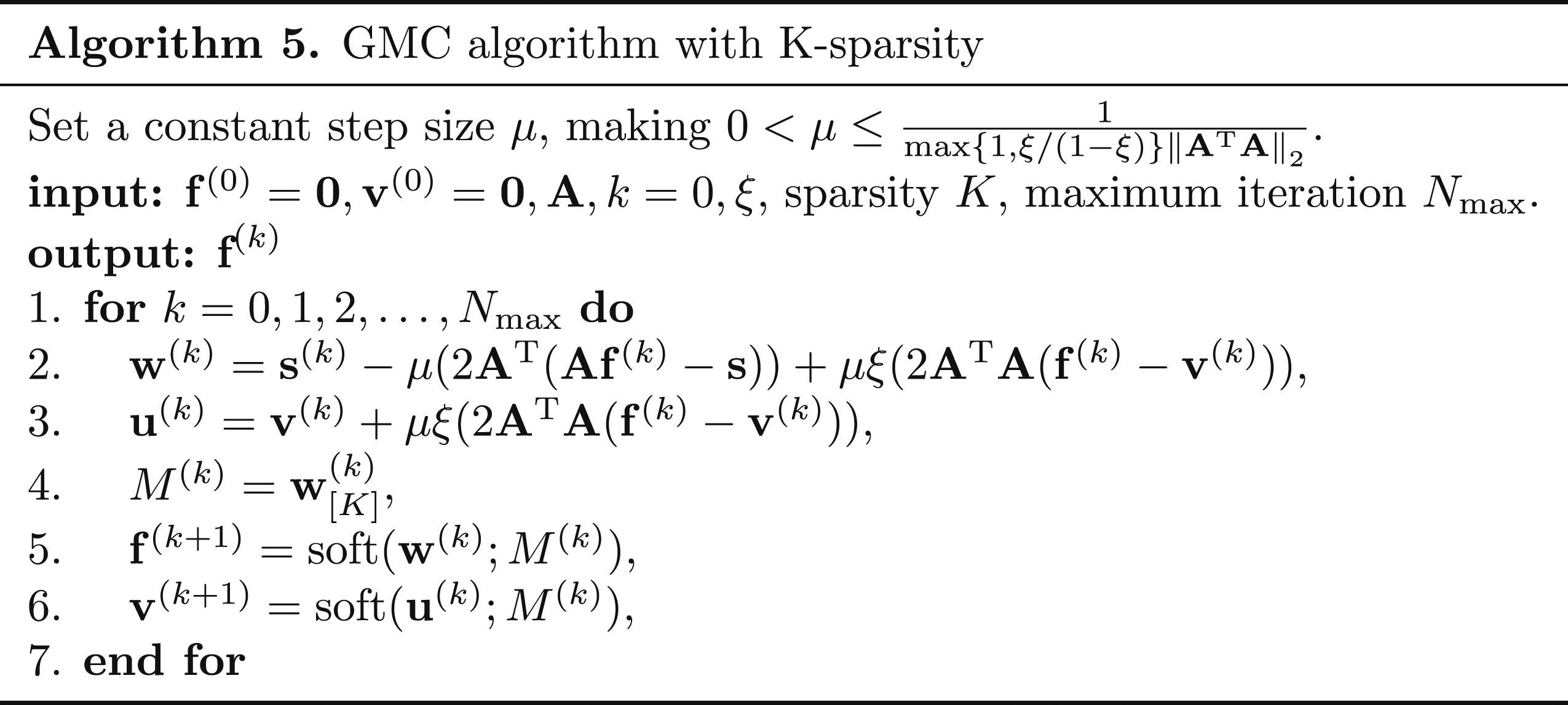
It is often a difficult problem to choose an appropriate regularization parameter. Moreover, the choice of the parameter tends to directly affect the performance of the regularization method. There exist various criteria that can be used to choose the regularization parameter, such as Akaike Information Criterion (AIC), 39 Bayesian Information Criterion (BIC), 40 the L-curve method, 41 the generalized cross-validation method, 42 the K-sparsity method, 19 etc. Considering comprehensively, in order to take full advantage of sparse prior knowledge for impact forces and to also facilitate the uniform selection of regularization parameters, we adopt the K-sparsity criterion in the three algorithms mentioned above, namely, ISTA, GMC, and AGMC, for the adaptive selection of the regularization parameter λ.
It can be observed from the above three algorithms that λ only affects the threshold value in the soft thresholding function, and does not directly affect the iterative convergence speed. Given that λ determines how many coefficients are equal to zero in each iteration and how many should be preserved, we can make use of the K-sparsity prior knowledge of impact forces to adaptively set the value of λ at each iteration. The specific operation is to replace the parameter λμ with the adaptive threshold M(k) which is set as the Kth largest coefficient in absolute value of the vector
Numerical validation
In this section, to verify the performance of the proposed method AGMC in improving convergence speed and its reliability of impact force identification, a series of simulations are carried out. First, it is necessary to discuss the selection strategy of the regularization parameter K. Moreover, we compare the impact force identification results of AGMC, GMC, and ISTA when only changing the impact position with other conditions kept the same. Finally, we comparatively investigate the effect of noise on the accuracy of the three methods in reconstructing and localizing impact forces.
Problem description
Material properties of the composite plate.

The numerical validation is based on the strain measurements of the plate as structural responses. The arrangement of strain sensors and potential impact locations for all subsequent simulation studies is illustrated in Figure 3, where the optional measurement positions are labeled as S1∼S20, and the potential impact locations are numbered as P1∼P15. To simulate the under-determined cases, only four sensors are utilized to acquire the responses, as depicted in Figure 3. The composite plate with clamped opposite edges: (a) graphical representation of an applied impact force on the composite plate and (b) arrangement of strain gauges and potential impact locations. A total of 15 potential impact locations are taken into account, with only four selected measurement positions at S8, S10, S14, and S18.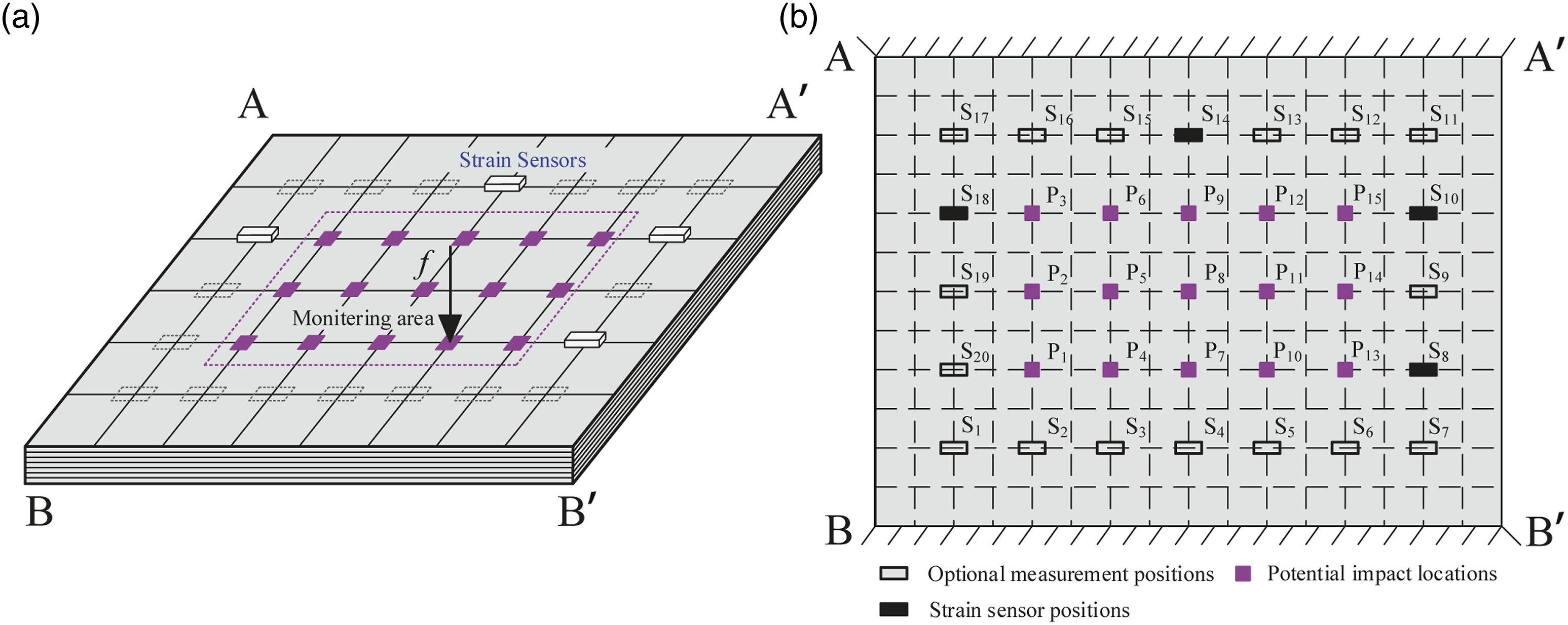
A short-duration impulse force in the form of a Gaussian function is applied perpendicular to the plate, which can be expressed mathematically as
To generate synthetic signals that are representative of actual measured signals, Gaussian white noise with a standard deviation σ is added to the simulated dynamic responses, which is expressed as
To obtain IRF h(t) in advance, we utilize the strain mode shapes of the plate and employ the Green function method.
43
To assess the accuracy of the force reconstruction, the relative error (RE) between the actual force vector, denoted as 
In addition, to serve as a local performance indicator for assessing the amplitude deviation in the identification results of impact forces, the peak relative error (PRE) is defined as
Furthermore, for the under-determined case, the localization error (LE) is required to assess the accuracy of the impact force localization, which is defined as
In order to facilitate comparison, it is necessary for the iteration termination criteria of the three algorithms to be consistent, which is denoted as
Regularization parameter selection strategy
For choosing an appropriate regularization parameter K using the K-sparsity criterion, we discuss the effect of different K values on identification results of the three previously mentioned methods, namely, AGMC, GMC, and ISTA.
In this study, an impact force is applied perpendicularly to the plate at P2. Moreover, parameters are set as the sampling frequency f
s
= 10240Hz and the data analysis length N is 512 so that the size of transfer matrix
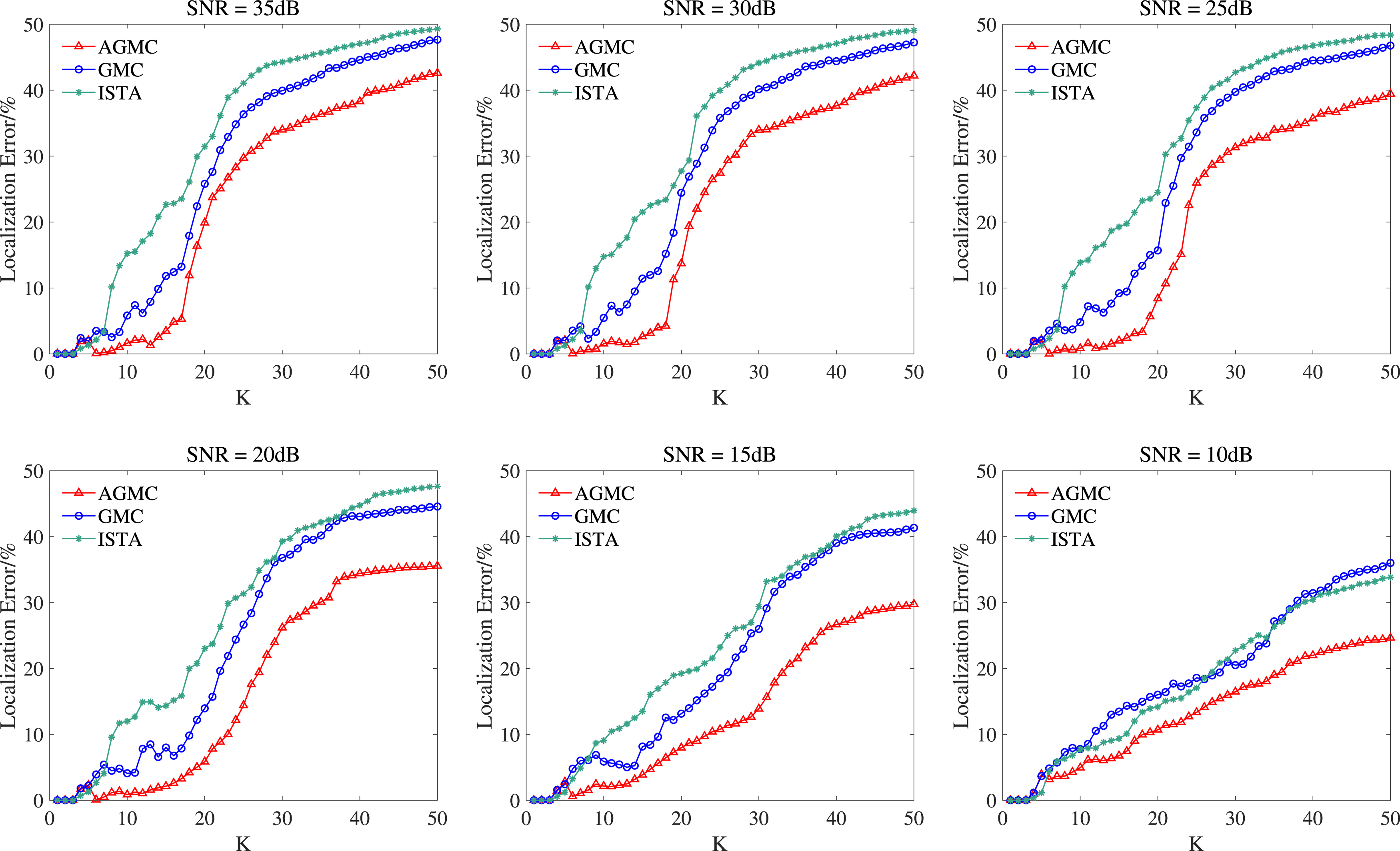
Figures 4 and 5 show the relationship of RE values and LE values with respect to K values, respectively. It is discovered that REs of AGMC have been kept at the lowest and its localization accuracy remains the highest among the three methods when the K value varies from 6 to 50. Furthermore, AGMC can maintain its identification results at low REs and LEs over a large range of K values and this range is less affected by noise levels due to the great robustness of AGMC. It is worth noting that the RE variation trends of the three methods tend to be flat from K = 6 under 10 dB noise, and the rising trends of their LEs also slow down to a certain extent. The phenomenon of insensitivity to the value of K can also be observed in Ref.
19
According to the above phenomena, the K value of AGMC here can be chosen in the range of 6 to 20 under the requirement of low RE and LE. In the next simulation studies, the K value of the three methods is uniformly set as 15, which is almost consistent with the sparsity of the applied impact force in time domain. Relationship between RE and K values for identifying the same impact imposed at P2 by AGMC, GMC, and ISTA at noise levels of 35, 30, 25, 20, 15, 10 dB, respectively. Relationship between LE and K values for identifying the same impact imposed at P2 by AGMC, GMC, and ISTA at noise levels of 35, 30, 25, 20, 15, 10 dB, respectively.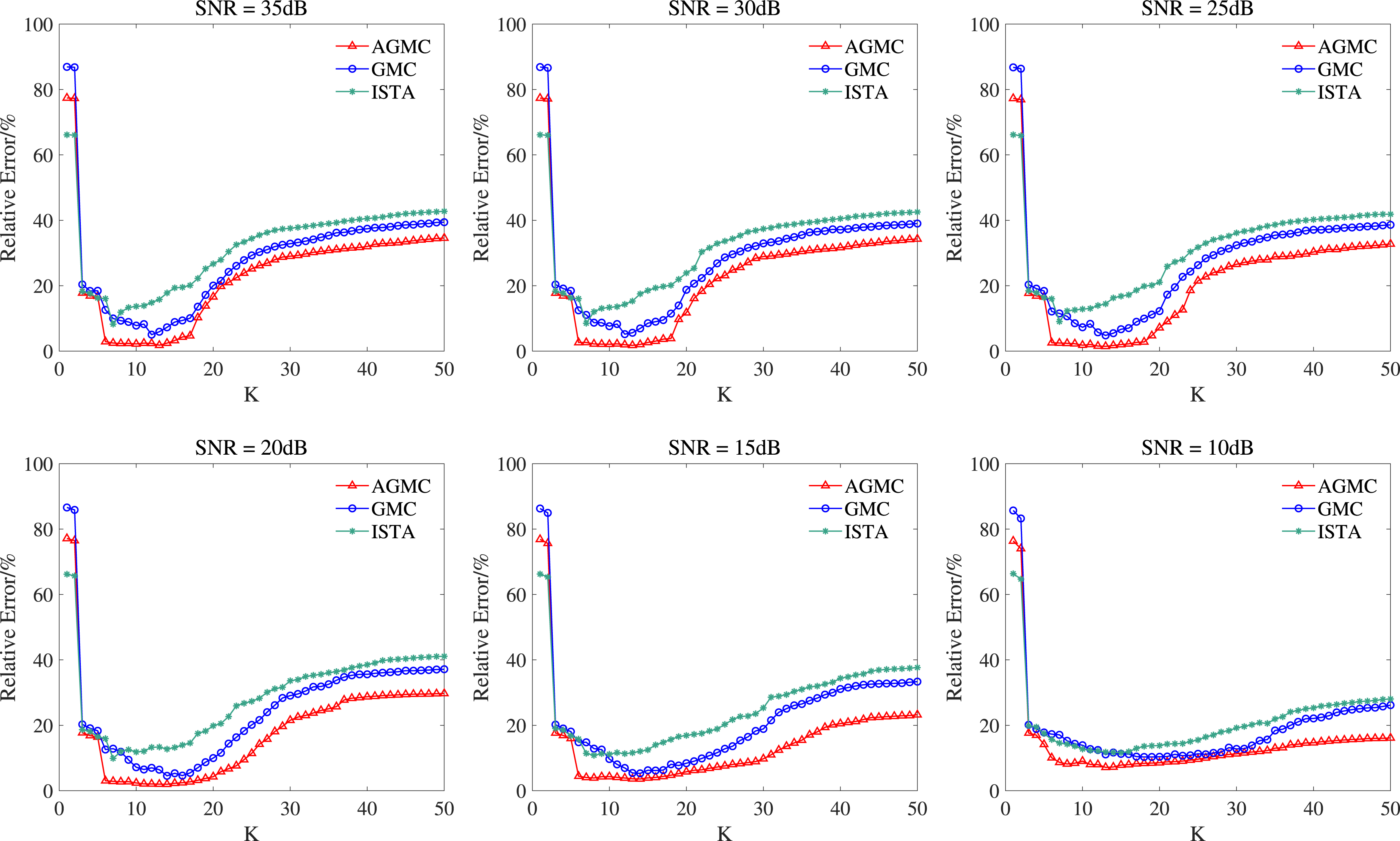
Impact force identification using AGMC
To assess the performance of the proposed method in improving the convergence rate and identifying the impact force, we compare iterative convergence curves, force reconstruction, and localization accuracy of the proposed AGMC method with GMC and ISTA methods under the same simulation conditions. Utilizing the Monte Carlo method in this study, eight locations stochastically selected from the 15 potential impact locations are taken into consideration here. An impact force is applied to the eight locations, respectively; meanwhile, the noise level of measurement signals is set to 25 dB. Likewise, to remove randomness, one hundred runs are performed independently at each impact location.
Taken as examples, iterative convergence curves and identification results of the impact force applied at point P3 and P15, respectively, under the maximum iteration number of 3000 are shown in Figures 6 and 7. The cost value of AGMC increases significantly in the first iterations and then decreases rapidly. The final cost value of AGMC is very close to that of GMC. One can note that AGMC has the fastest convergence rate among the three methods. Furthermore, the amplitude and topography of AGMC identification results are closest to the exact forces, while the amplitude of the identification results obtained by ISTA differs the most from the true one. For further verification, relationships between the three accuracy indicators (PRE, RE, and LE) and maximum iteration number are portrayed in Figure 8. One can find that AGMC maintains the lowest PREs, REs, and LEs with the same maximum iteration number as GMC and ISTA and its three errors in the iterative process decline fastest among the three methods. Iterative convergence curves of AGMC, GMC, and ISTA with a maximum iteration number of 3000: (a) impact at P3 and (b) impact at P15. Reconstructed impact time histories at all monitored locations under 25 dB noise using four strain gages when (a) real impact acts on P3 and (b) real impact acts on P15. Relationship between the three accuracy indicators and maximum iteration number of AGMC, GMC, and ISTA: (a1)–(a3) impact at P3 and (b1)–(b3) impact at P15.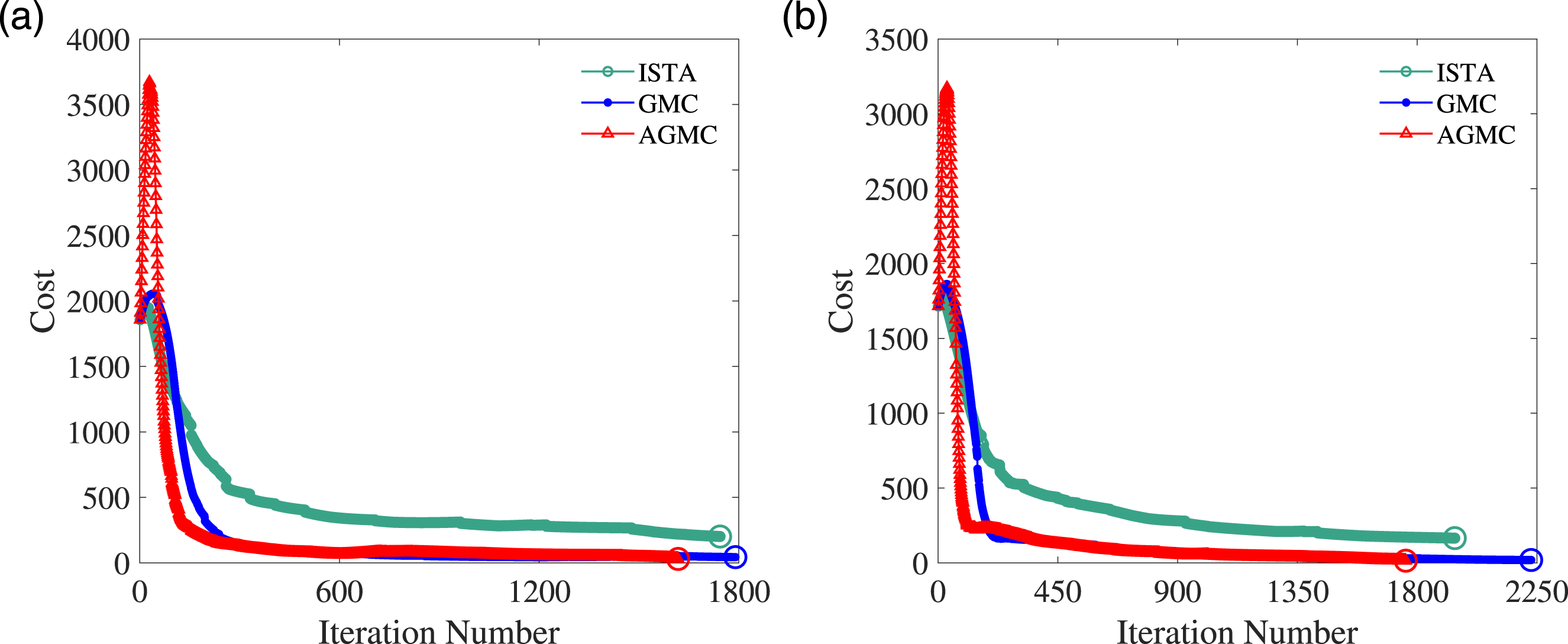
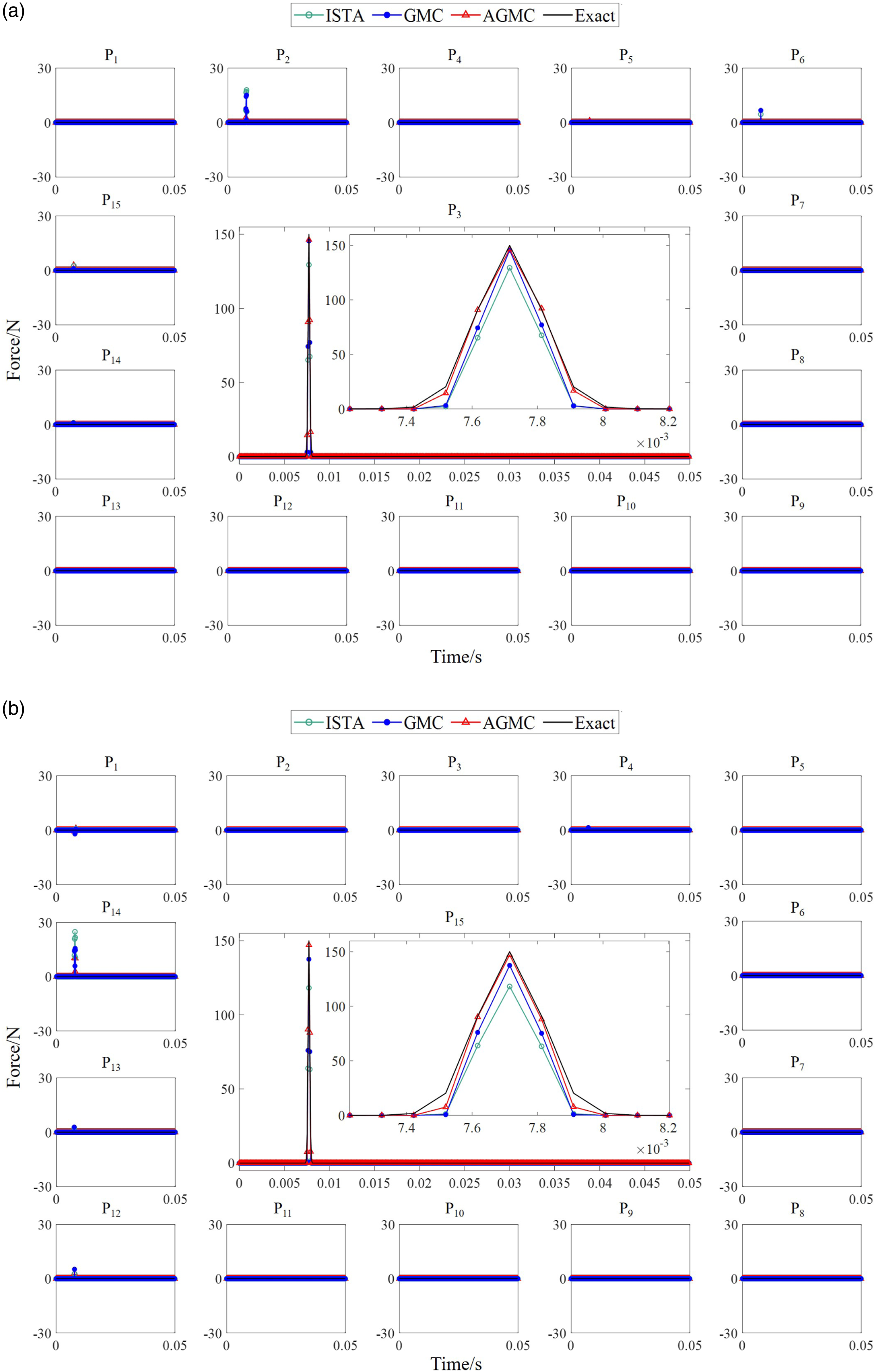
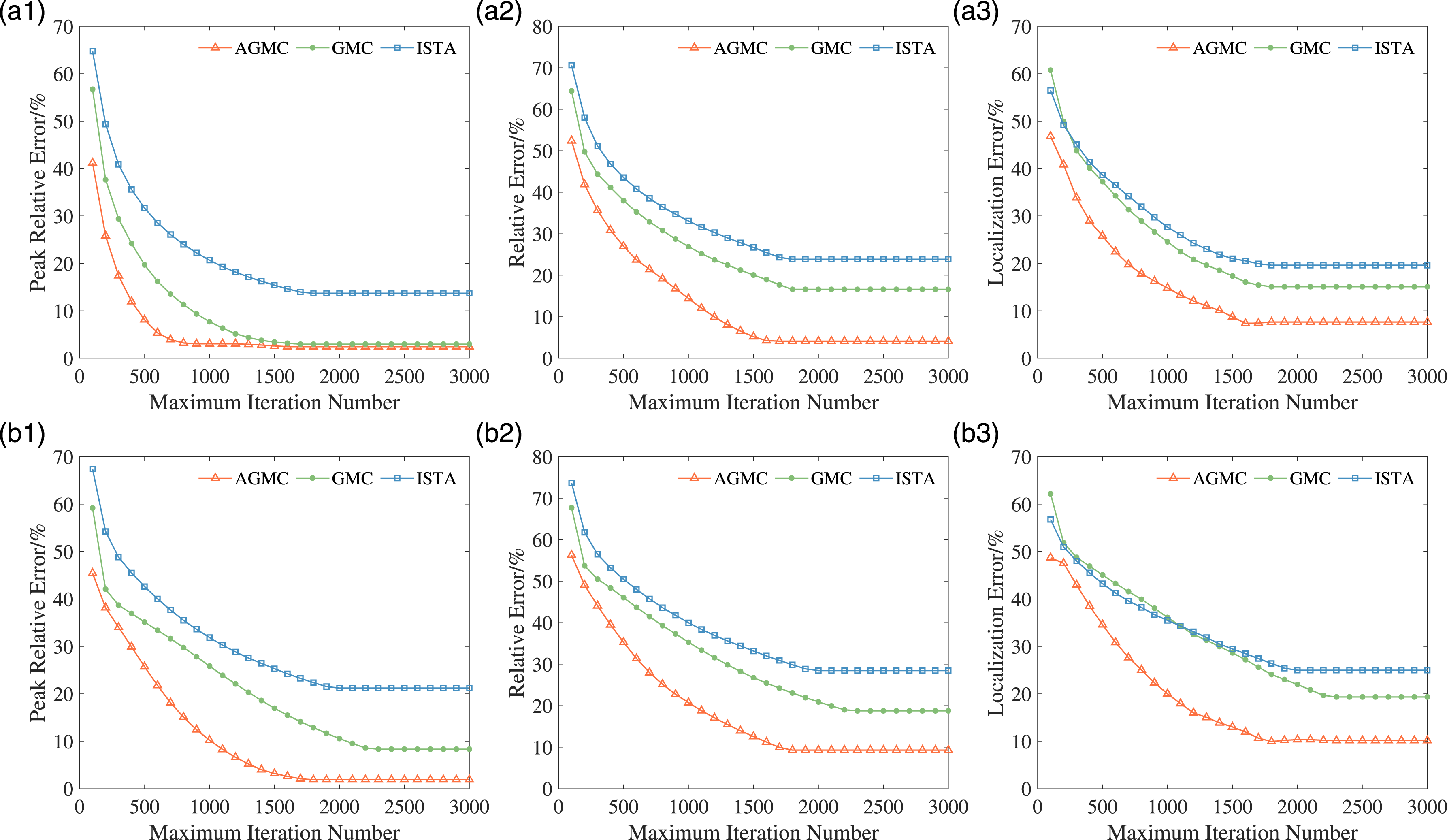
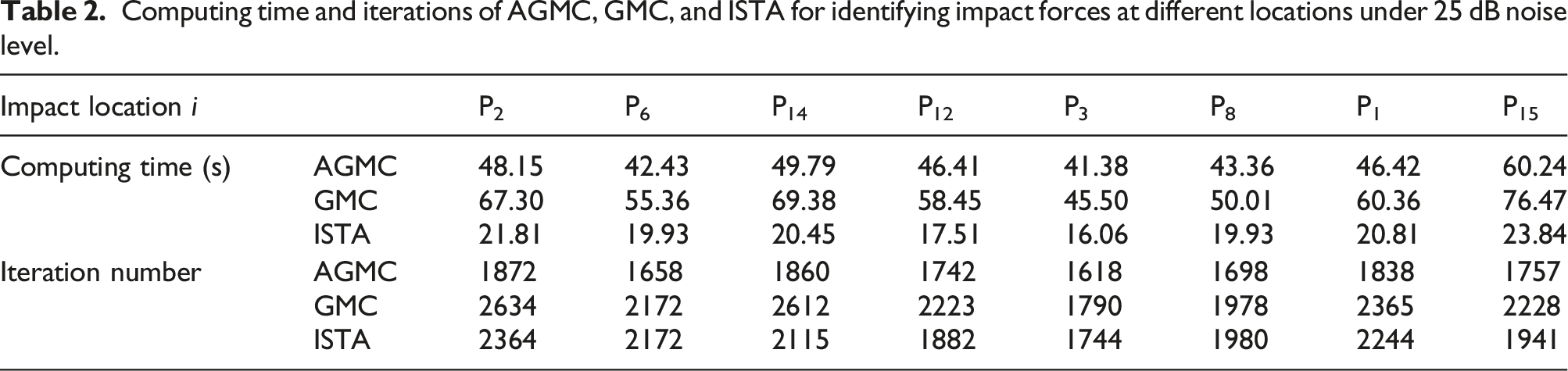
Figure 9 depicts the comparison of PREs, REs, and LEs in the identification results of the three methods at the eight randomly selected locations and Table 2 indicates the respective computing time and iteration number. It can be discovered that the iteration number of AGMC is without exception the least among the three methods and its computing time is also shortened compared to GMC. In addition, it is worth noting that ISTA exhibits PREs all above 10%, which can be attributed to the biased estimation caused by the ℓ1-norm regularization method. Although the computing time of AGMC is longer than that of ISTA, AGMC can achieve impact force identification with high accuracy, and its PREs, REs, and LEs are less than those of GMC and ISTA. The three accuracy indicators of identification results of impact forces at eight different locations under 25 dB noise level by AGMC, GMC, and ISTA: (a) PRE, (b) RE, (c) LE. Computing time and iterations of AGMC, GMC, and ISTA for identifying impact forces at different locations under 25 dB noise level.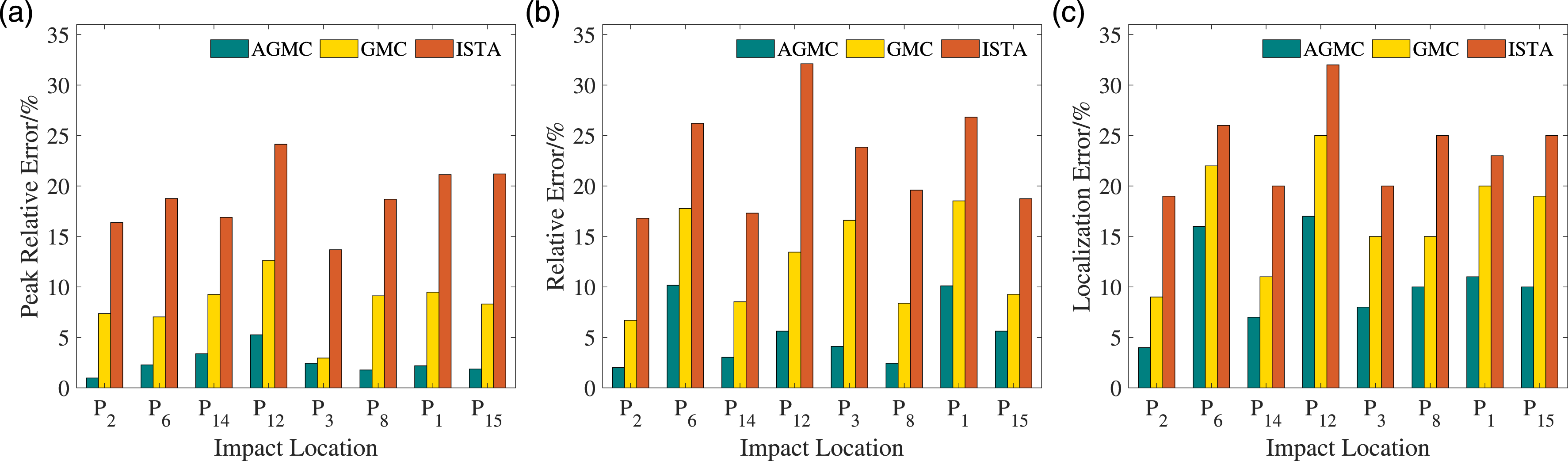
The effect of noise level
To assess the robustness of the AGMC method against varying levels of noise, we analyze and compare the performance of the AGMC, GMC, and ISTA methods in constructing and localizing the impact force applied at P1 and P15 locations, respectively. Six different noise levels, namely, 35 dB, 30 dB, 25 dB, 20 dB, 15 dB, 10 dB, are considered in this study. Similarly, one hundred separate runs are conducted at each noise level to avoid randomness.
Computing time and iterations of identification results for impact forces imposed at P1 and P15 respectively by AGMC, GMC, and ISTA at different noise levels.

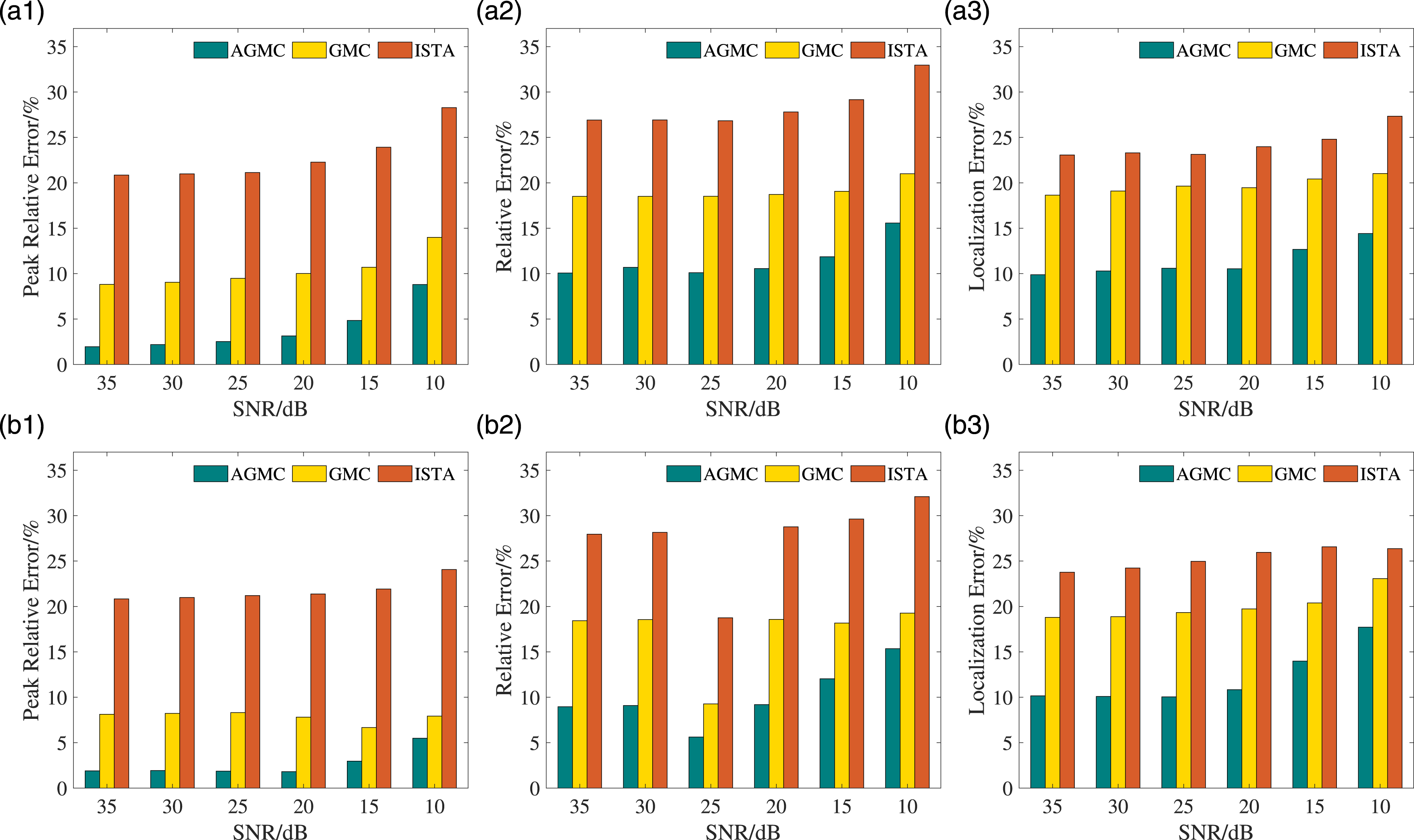
The three accuracy indicators of identification results for the same impact force via AGMC, GMC, and ISTA at different noise levels: (a1)–(a3) impact at P1 and (b1)–(b3) impact at P15.
Experimental verification
In this section, an experimental verification is conducted on a composite plate to validate the efficacy of the AGMC method in accelerating the convergence speed and improving the accuracy of impact force reconstruction and localization. An under-determined case is considered here, where only four strain gages are employed to monitor 15 potential impact locations, thus ensuring consistency in the dimension of the transfer matrix
Experimental set-up
The experimental set-up involves an opposite-side-clamped composite plate, which possesses the same parameters and properties as the simulation model. The details of this configuration can be observed in Figure 11. Impact forces are generated using an impact hammer (PCB 086C03), and the impulsive signals are measured by a force sensor embedded in the hammer head. Strain responses are obtained via strain sensors (PCB 740B02). Both force and strain signals are acquired simultaneously using LMS SCADASIII Data Acquisition System with a sampling frequency of 10240 Hz. Potential impact positions are denoted by P1∼P15, and strain sensor locations are numbered as S1∼S10. Experimental configuration consisted of the composite plate with two opposite edges clamped. Four strain sensors, namely S1, S2, S7, S9, are selected to monitor the 15 potential impact locations.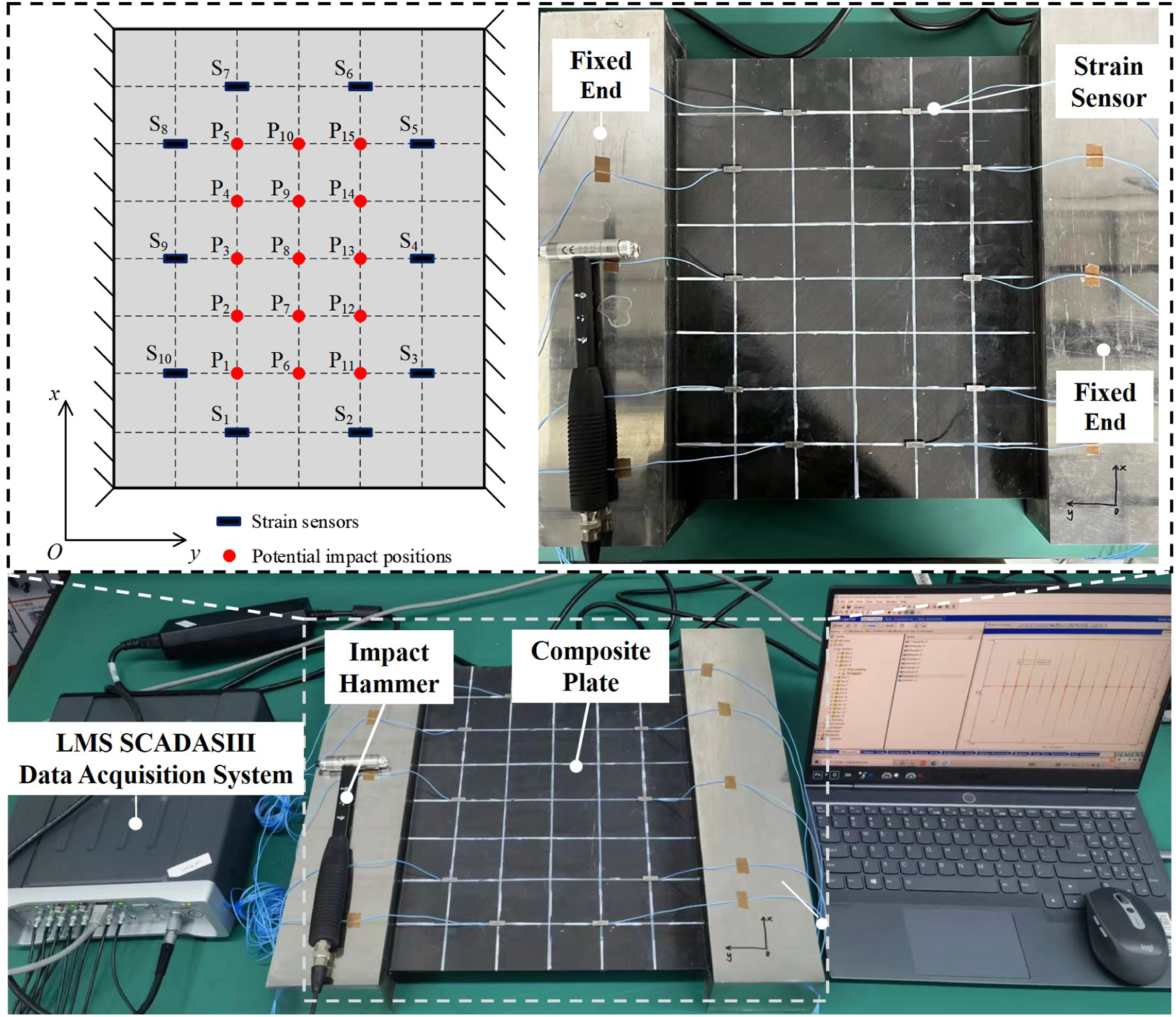
In accordance with the simulation study, the strain responses measured at S1, S2, S7, and S9 are utilized to monitor all 15 potential impact positions. FRF a
ij
(ω), representing the relationship between the output position i and the input location j, is obtained via impact testing using the LMS modal testing module. IRF a
ij
(t), calculated by applying IFFT to a
ij
(ω), is discretized to form the Toeplitz matrix. Consistent with the simulation, a data analysis length N = 512 is selected, leading to the dimension of
Results and discussion
Taking impact forces imposed at P5 and P11 as examples, the K value of the three methods is set as 15 and the non-convexity parameter ξ of AGMC and GMC is fixed as 0.5. Figures 12 and 13 show the time-history reconstruction and localization results of impact forces and iterative convergence curves of the three methods. Table 4 lists the PREs, REs, LEs, and computing time of the identification results. The iterative convergence curves in two figures intuitively illustrate that AGMC convergences faster than GMC and ISTA with fewer iterations. Table 4 also presents twice computing time of AGMC are 61.55 s and 76.54 s, which are 13.02% and 16.64% shorter than that of GMC when the impact occurs at P5 and P11, respectively. Identification results of the impact force applied to P5 by AGMC, GMC and ISTA: (a)–(c) localization results of AGMC, GMC, and ISTA respectively, (d) time-history reconstruction results, and (e) iterative convergence curves of AGMC, GMC, and ISTA with 1802, 2024, and 2272 iterations, respectively. Identification results of the impact force applied to P11 by AGMC, GMC and ISTA: (a)–(c) localization results of AGMC, GMC, and ISTA, respectively, (d) time-history reconstruction results, and (e) iterative convergence curves of AGMC, GMC, and ISTA with 2286, 2737, and 2498 iterations, respectively. The three accuracy indicators and computing time of AGMC, GMC, and ISTA on identification results of impact forces applied to P5 and P11, respectively.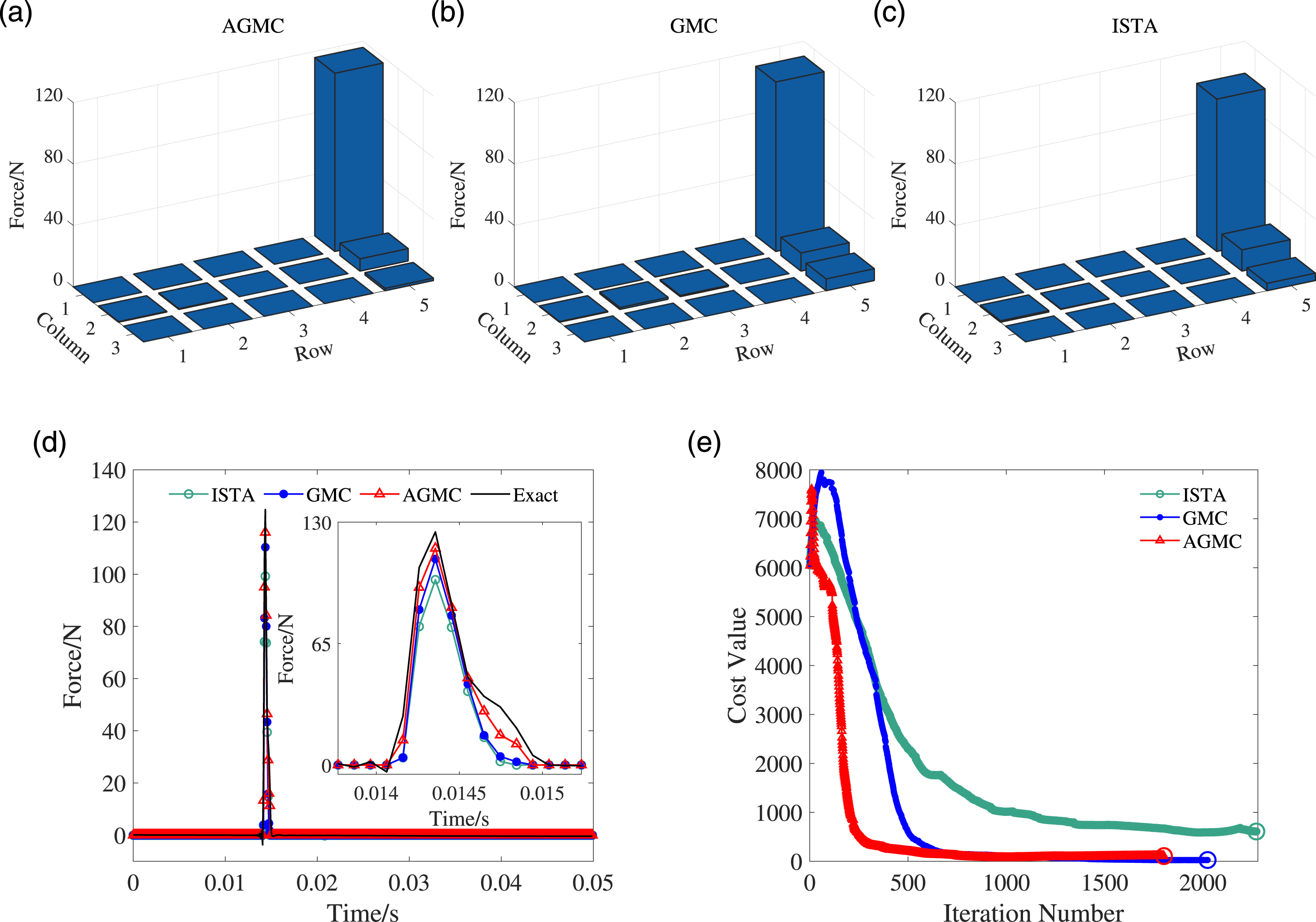
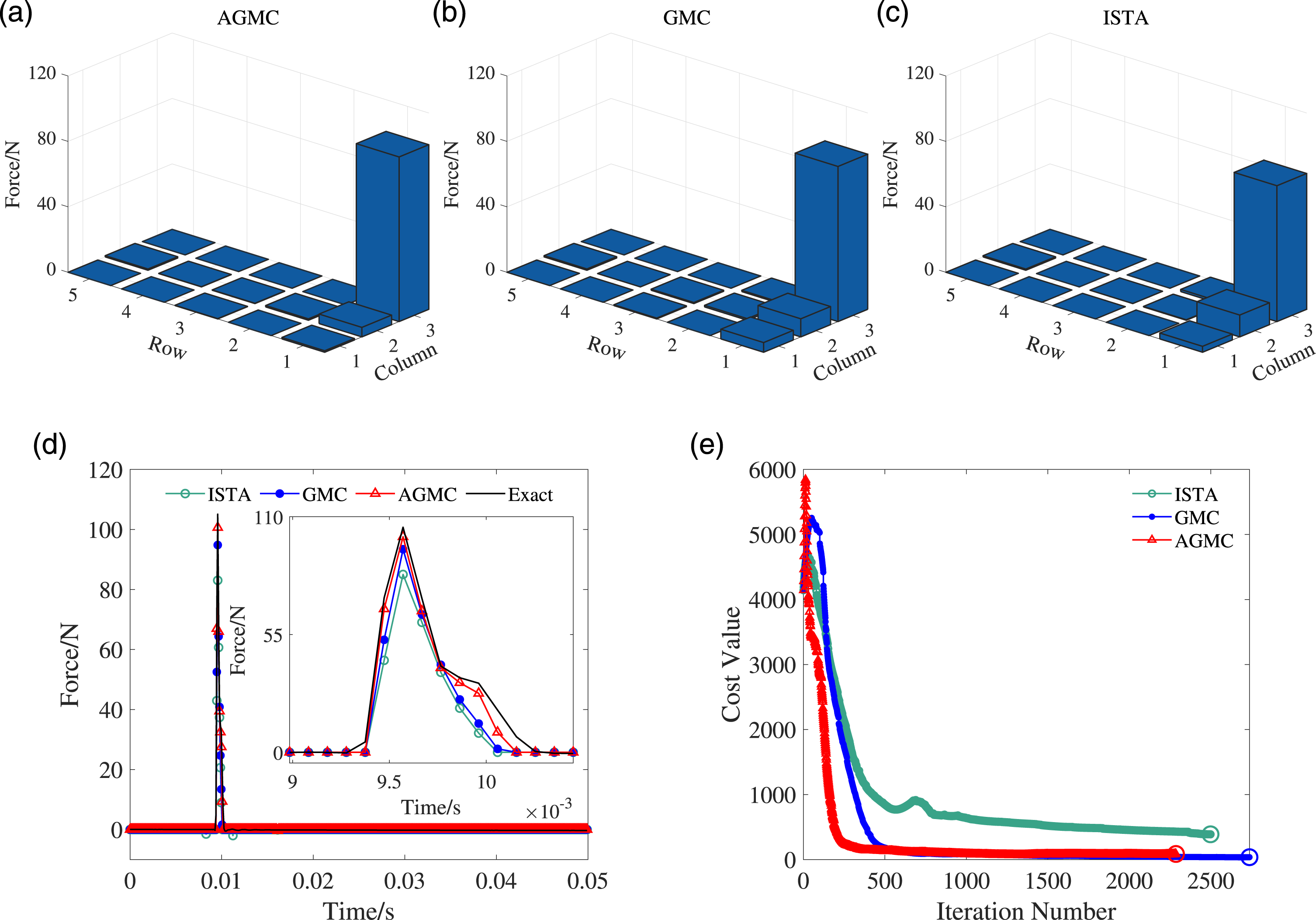

Meanwhile, as shown in Figures 12 and 13, the force time-history reconstruction results of AGMC are the closest to the amplitude and shape of the exact forces and its force localization results are most accurate among the three methods. We noticed in Table 4 that AGMC holds the lowest PREs, REs, LEs, 6.98%, 14.05%, 9.36% at P5, and 4.24%, 11.01%, 8.05% at P11, respectively. It implies that when AGMC, GMC, and ISTA all reach the convergence criteria, AGMC can reconstruct impact forces with highest reconstruction and localization accuracy among the three methods with a shorter computing time than GMC. Meanwhile, although ISTA holds the shortest computational time, its REs, PREs, and LEs are significantly large. In particular, its PREs exceeding 20% are unacceptable identification results. This also highlights that ISTA is prone to the issue of underestimating the amplitude of the impact force in practical applications.
Figure 14 illustrates the relationships between the three accuracy indicators (PRE, RE, and LE) and maximum iteration number of AGMC, GMC, and ISTA when impacting at P5 and P11, respectively. One can note that under the same maximum iteration limit, AGMC consistently achieves the lowest values of RE, PRE, and LE among the three methods. Additionally, AGMC also exhibits the fastest convergence among the three methods with its PREs, REs, and LEs decreasing the steepest during the iteration process. Relationships between the three accuracy indicators and maximum iteration number of AGMC, GMC, and ISTA: (a1)–(a3) impact at P5 and (b1)–(b3) impact at P11.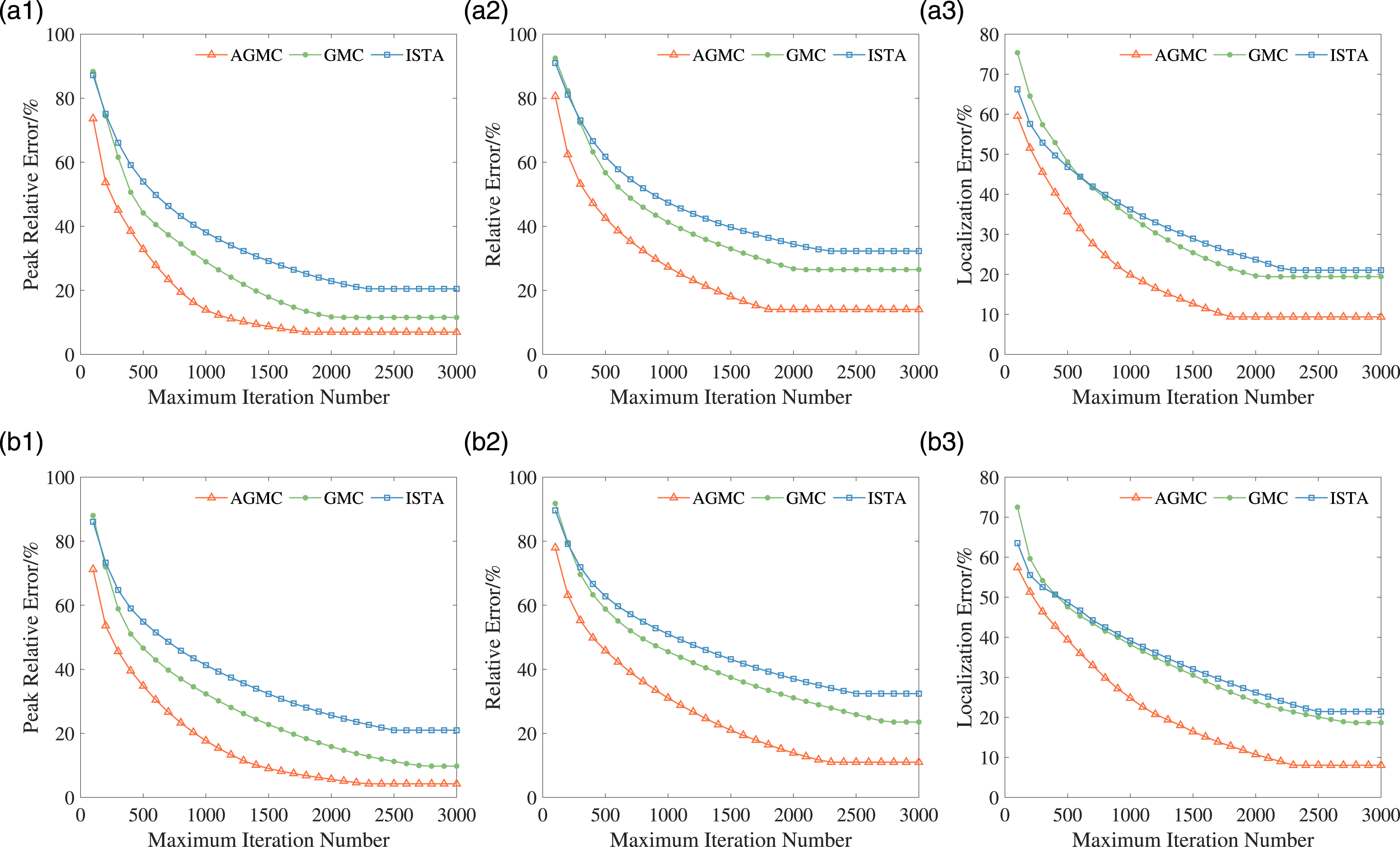
From all the above results, we can conclude that the AGMC method effectively accelerates the convergence rate and thus solves the inefficiency problem of GMC. In addition, AGMC exhibits the highest accuracy among the three methods in terms of reconstructing and localizing impact forces under the under-determined condition, using the same iteration termination criteria.
Conclusions
In this paper, an accelerated generalized minimax-concave sparse regularization method is proposed for the purpose of reconstructing and localizing impact forces from limited structure responses under the under-determined condition. Although the GMC penalty is non-convex, it can still preserve the convexity of the cost function under a certain condition, so the global optimal solution can be obtained through convex optimization algorithms. In view of the fact that the solution efficiency of the GMC method decreases as the transfer matrix dimension increases, the Nesterov’s acceleration technique is utilized to improve the computational efficiency and the effectiveness of this strategy is verified systematically through simulations and experiments. The K-sparsity criterion is also used to adaptively select regularization parameters, and we noted that the K value can be selected in a relatively wide range. Simulations and experiments are carried out on a composite plate with two opposite edges clamped, both monitoring 15 potential impact locations with four strain sensors.
In summary, the convergence speed of AGMC is much faster than that of GMC in both simulations and experiments, which greatly improves the computational efficiency. Moreover, in the simulations, the AGMC method outperforms GMC and ISTA methods in force reconstruction and localization at different impact locations and different noise levels, with smallest PREs, REs, and LEs, even under 10 dB noise. Simulation results also demonstrate that AGMC is really resistant to noise. Finally, in the experimental study, AGMC still performs better than GMC and ISTA with highest reconstruction and localization accuracy. All these satisfactory performances of the AGMC method demonstrate its potential to solve the impact force identification problem under the under-determined condition in practical engineering applications.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (Nos.52075414 & 52305127), and China Postdoctoral Science Foundation (No.2021M702595).
Replication of results
All the presented results can be replicated, and the datasets used or analyzed during the current study are available from the corresponding author on reasonable request. We are confident that sufficient details on methodology and implementation are contained in this paper, and readers who have difficulties and questions about replicating the results are welcome to contact the authors.