
Abstract
This paper proposes a synthetical multi-degree-of-freedom mathematical modelling for analyzing the dynamic characteristics of angular contact ball bearing with waviness subjected to the external load working conditions. The above multi-degree-of-freedom mathematical modelling is established based on nonlinear elastic Hertz contact theory and inner raceway control theory by employing improved Newton–Raphson iteration method; the validation of the established mathematical modelling is verified by comparing the presented results with the existing literature results. The above mathematical modelling has considered raceway waviness, ball waviness, bearing clearance, centrifugal force, gyroscopic moment, external loads, and rotating speed comprehensively. Firstly, the effects of waviness order and waviness amplitude on time-varying contact and stiffness characteristics of angular contact ball bearing are investigated systematically. Then, the influences of bearing clearance, rotating speed, axial force, radial force, and torque on the dynamic contact and stiffness characteristics of angular contact ball bearing with waviness are analyzed thoroughly. The main results show that the solution results of mathematical modelling have converged, respectively, when raceway waviness order increases to 25 and ball waviness order increases to 5; The variation tendencies of time-varying contact angle, contact force, and stiffness of angular contact ball bearing with waviness are aperiodic; The amplitudes of time-varying contact angle, contact force, and stiffness of angular contact ball bearing increase evidently with waviness amplitude increased; The bearing clearance has important influence on the contact angle and contact force of outer raceway and inner raceway, respectively; The effects of radial force and torque on contact and stiffness characteristics are consistent basically in the corresponding direction; The influences of axial force and rotating speed on the contact and stiffness characteristics are more remarkable compared with other factors. The investigations of contact and stiffness characteristics of angular contact ball bearing with waviness are helpful for the designation and manufacture of high precision angular contact ball bearing.
Keywords
Introduction
According to the existing research results, ball bearings play an important role in numerous rotating machinery systems. As the typical representative of ball bearings, angular contact ball bearing has a series of advantages including high reliability, high precision, high speed, and low power consumption. Therefore, angular contact ball bearing has been applied widely in rotor-bearing system of CNC machining centers rocket motors and aero-engines. The global dynamic performances including stability, reliability, and accuracy of the rotor-bearing system depend on largely the nonlinear dynamic behaviors of angular contact ball bearing. It is worth mentioning the fact that the influencing factors of nonlinear dynamic behaviors of angular contact ball bearing are numerous, which mainly include geometric position relationship, contact deformation relationship, bearing clearance, waviness, and external load working conditions. Among the above numerous influencing factors, waviness cannot be avoided because it is caused by manufacturing errors; the effect of waviness on the nonlinear dynamic characteristics of angular contact ball bearing is more and more obvious with the demands of high precision and high stability increased.
In order to investigate the variation tendency of nonlinear dynamic behaviors of angular contact ball bearing systematically subjected to various influencing factors, the establishment of comprehensive numerical analytical modelling has become a prevailing tendency. The above tendency has attracted a large number of experts and scholars who have devoted themselves to the investigation of numerical analytical modelling of angular contact ball bearing and many remarkable research achievements have been attained.
Many scholars have devoted themselves to proposing various mathematical modelling for investigating the influences of angular contact ball bearing with waviness on rotor-bearing system in the last few decade years. Yao et al. 1 developed a three degree of freedom mathematical model for studying the dynamic characteristics including stiffness and damping of double-row self-aligning ball bearing system subjected to external load conditions and the influences of several crucial governing parameters including external loads, raceway waviness, and numbers of balls have been taken into account. Jang et al. 2 presented an analytical model for investigating the influences of ball bearing waviness on the vibration characteristics of rotor-bearing system by employing the Runge–Kutta–Fehlberg algorithm. Bai et al. 3 established a general dynamic analytical model for studying the influences of surface waviness, internal clearance, and external load on the dynamic performances including nonlinear stability and vibration characteristics of rotor-bearing system. Liu et al. 4 put forward an experimental analysis method for focusing on the influences of inner and outer raceway waviness excitations on the vibration behaviors of ball bearings on the basis of signal coherence theory. Bizarre et al. 5 deduced a complete five degrees of freedom nonlinear model for evaluating the dynamic behaviors including vibration and noise reduction, lifetime estimation, and fault diagnosis of oil lubricated angular contact ball bearings under different external loading conditions. Liu et al.6–8 proposed a time-varying friction moment calculation method for calculating the time-varying friction moments including rolling friction moments and sliding friction moments of angular contact ball bearing with waviness error, many influencing factors including waviness amplitude, waviness order, rotating speed, and external load conditions are considered. Ren et al. 9 studied the influences of raceway waviness on the oil film in the thrust ball bearings by employing the combination of experimental and numerical methods based on the Hertzian contact theory. Zhang et al. 10 proposed a friction torque dynamic model of ball bearing with geometrical imperfections according to the established dynamic models of friction, raceway waviness and multi-body; the effects of waviness, speed and load on torque of angular contact ball bearings were analyzed systematically from the perspectives of time and frequency domain. Gao et al. 11 presented a nonlinear dynamic model of an eight degrees of freedom dual-rotor system for investigating the influences of local defect including inner and outer raceway surface of angular contact ball bearing on the nonlinear vibration characteristics of a dual-rotor system. Cheng et al. 12 established a mathematical model for analyzing mechanical characteristics and nonlinear dynamic responses of rotor-bearing-coupling system; the influences of raceway defects, surface waviness, radial clearance and varying compliance are investigated systematically. Harsha et al. 13 analyzed the stability of rotor-bearing system by using Newmark-β and Newton–Raphson methods; the influences of surface waviness and numbers of balls of angular contact ball bearing on the vibration characteristics of rotor-bearing system are investigated systematically. Shah et al. 14 presented a dynamic model for analyzing the vibration behaviors of lubricated deep groove ball bearings with raceway waviness by employing theoretical and experimental methods. Zhang et al.15–17 proposed a comprehensive dynamic model for analyzing the stability of rotor-bearing system based on the extended Jones–Harris model, and the bearing waviness, unbalance force, and numbers of ball of angular contact ball bearing are taken into account. Wang et al. 18 developed an improved nonlinear dynamic model of rotor system supported by angular contact ball bearings; the influences of preload working condition, inner and outer raceway waviness, elasto-hydrodynamic lubrication, and load distribution of angular contact ball bearing are analyzed systematically. Gao et al.19–21 proposed a kinematic-Hertzian-thermo-hydro-dynamic model with regard to large-scale angular contact ball bearing for analyzing ball bearing skidding and over-skidding. Tuhin et al. 22 presented two novel methods including base excitation method and bearing kinematics augmented base excitation method for investigating the dynamic response of rotor-bearing system subjected to rolling element bearing waviness excitation. Neisi et al. 23 focused on investigating the influences of surface waviness order on the generation and thermal expansion of touchdown bearing by establishing numerical and FE models. Wang et al. 24 established a four degrees of freedom mathematical model of rotor system supported by roller bearing for investigating the nonlinear dynamic behaviors of rotor rolling bearing system by employing Newmark-β and Newton–Raphson iteration methods, the effects of nonlinear Hertzian contact force, radial clearances, and bearing waviness on the dynamic behaviors of rotor rolling bearing system.
The establishment of dynamic models of angular contact ball bearing under various working conditions has attracted the attention of a lot of scholars. Wang et al.25–27 proposed an improved nonlinear dynamic model for investigating the dynamic performances of angular contact ball bearing, and the assembly state, preload, bearing deformations, and ball-inner raceway separation conditions are considered in the above dynamic model. Fang et al. 28 derived an improved dynamic model with regard to angular contact ball bearing subjected to different bearing configurations and the influences of bearing stiffness on the nature frequencies of the rotor systems. Wen et al.29,30 completed a multi-degree-of-freedom dynamic model of angular contact ball bearing with localized surface defect for analyzing the dynamic behaviors including load characteristics, angular misalignments, and tribo-dynamic performance; the influences of cage and oil lubrication are considered. Xi et al. 31 analyzed the contact probability between ball and raceway of angular contact ball bearing subjected to different load conditions by using multi-body dynamics and a spherical grid division method. Wang et al. 32 developed a dynamic model for analyzing the effects of ball and raceway surface roughness on lubrication performance, ball motion, subsurface stress, friction forces, and moments of angular contact ball bearing. Liu et al.33–35 presented an analytical calculation method for solving internal load distribution and stiffness of preloaded angular contact ball bearing under external combined loads; the above investigations can provide theoretical basis for predicting performances and working life of angular contact ball bearing. Wang et al. 36 proposed a dynamic model for investigating the skidding behavior of angular contact ball bearing under different operating conditions by using fourth-order Runge–Kutta algorithm. Ma et al. 37 deduced the traction and contact equations with regard to four-contact-point ball bearing, and the variation tendency of bearing dynamic contact feature of four-contact-point ball bearing under external complex operating conditions is analyzed systematically. Krstić et al. 38 proposed a numerical thermal analysis angular contact of the ZKLN type which was produced by the German manufacturer Schaeffler by applying finite element analysis software ABAQUS. Patel et al. 39 established a theoretical analysis modelling for analyzing the influence of viscosity variation on a ferrofluid-based long bearing based on Reynolds type equation. Reddy et al. 40 studied the ball bearing parameter characteristics under various loads and rotating speeds based on Bucking-π-theorem by using the Taguchi method. Amer et al.41–48 employed multiple scales method (MSM), Krylov–Bogoliubov–Mitropolski (KBM) technique, and Poincaré’s small parameter method for solving the nonlinear dynamic characteristics including stability, chaotic, and energy-harvesting of multi-degree-of-freedom dynamic system with regard to various engineering structures.
Based on the existing investigations, it is not hard to see that the investigation with regard to the effect of bearing waviness on the nonlinear dynamic characteristics of angular contact ball bearing is relatively rare. Therefore, this article intends to establish a synthetical multi-degree-of-freedom mathematical modelling for calculating the nonlinear dynamic characteristics of angular contact ball bearing with waviness subjected to various working conditions. Compared with the published literatures, the main contribution of this paper can be interpreted as the above mathematical modelling is established based on nonlinear elastic Hertz contact theory and inner raceway control theory by employing improved Newton–Raphson iteration method. Meanwhile, the established mathematical modelling considers raceway waviness including axial waviness and radial waviness, ball waviness, bearing clearance, centrifugal force, gyroscopic moment, rotating speed, and external loads comprehensively. It is necessary to point that the improved Newton–Raphson iteration method can enhance the speed and accuracy of iteration solution of mathematical modelling significantly by introducing the iteration step adjustment factor. The investigation of this paper can provide the theoretical basis and technique guidance of the manufacture of angular contact ball bearing and is helpful for selecting appropriate waviness error range of angular contact ball bearing under various external load working conditions and engineering application fields.
The specific sections are arranged as follows. In Section 2, a synthetical mathematical modelling with regard to angular contact ball bearing is established and verified. In Section 3, the effects of waviness, bearing clearance, external loads, and rotating speed on nonlinear dynamic characteristics of angular contact ball bearing are discussed systematically. In Section 4, the investigation results of this article are summarized comprehensively. The specific geometric composition of angular contact ball bearing can be found in Figure 1. The structural composition of angular contact ball bearing.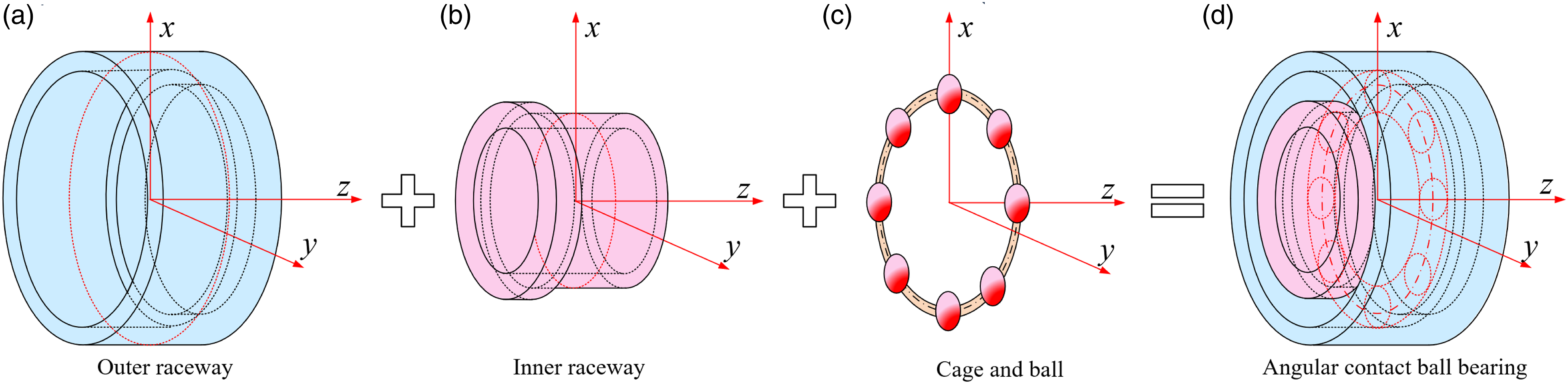
Mathematical modelling
The mathematical modelling of waviness
Based on the above research, the geometric imperfections are inevitable in the manufacturing process of angular contact ball bearing. Once the wavelength caused by geometric imperfections is much bigger than Hertzian contact width between the raceway and ball, the above geometric imperfections are named as waviness. According to the component of angular contact ball bearing, waviness can be classified as ball waviness and raceway waviness; raceway waviness can be divided into inner raceway and outer raceway waviness furtherly. In order to describe the waviness of angular contact ball bearing intuitively, the axial section view of angular contact ball bearing with waviness is shown as follows.
As one can see from Figure 2, the global structure of angular contact ball bearing with waviness is described by using Cartesian coordinate system o-xyz. Meanwhile, it also can be found that the global structure considers five degrees of freedom including three translational displacements x, y, z and two rotational displacements θ
x
, θ
y
. The symbols of ω
i
, ω
o
, ω
c
, ω
b
denote the inner raceway, outer raceway, cage rotating speed, and ball spinning velocity, respectively, and the outer raceway rotating speed is set as 0 usually due to the interference fit between outer raceway and bearing house. The sign of ψ
j
represents azimuth angle of the jth ball element, and the value range of j is from 1 to N. From Figure 2, it is not hard to find that inner and outer raceway waviness are distributed in the contact surface between the ball and raceway. However, the above inner and outer raceway waviness surfaces cannot be described by means of specific geometric functions easily. Therefore, the raceway waviness surfaces need to be divided into axial waviness and radial waviness by putting the above raceway waviness surfaces project into axial and radial directions. For ball waviness, the waviness surfaces of ball in contact with the inner and outer raceway are assumed as consistent and the ball waviness surfaces can be described by using the axial projection of ball waviness surface. The axial section view of angular contact ball bearing with waviness.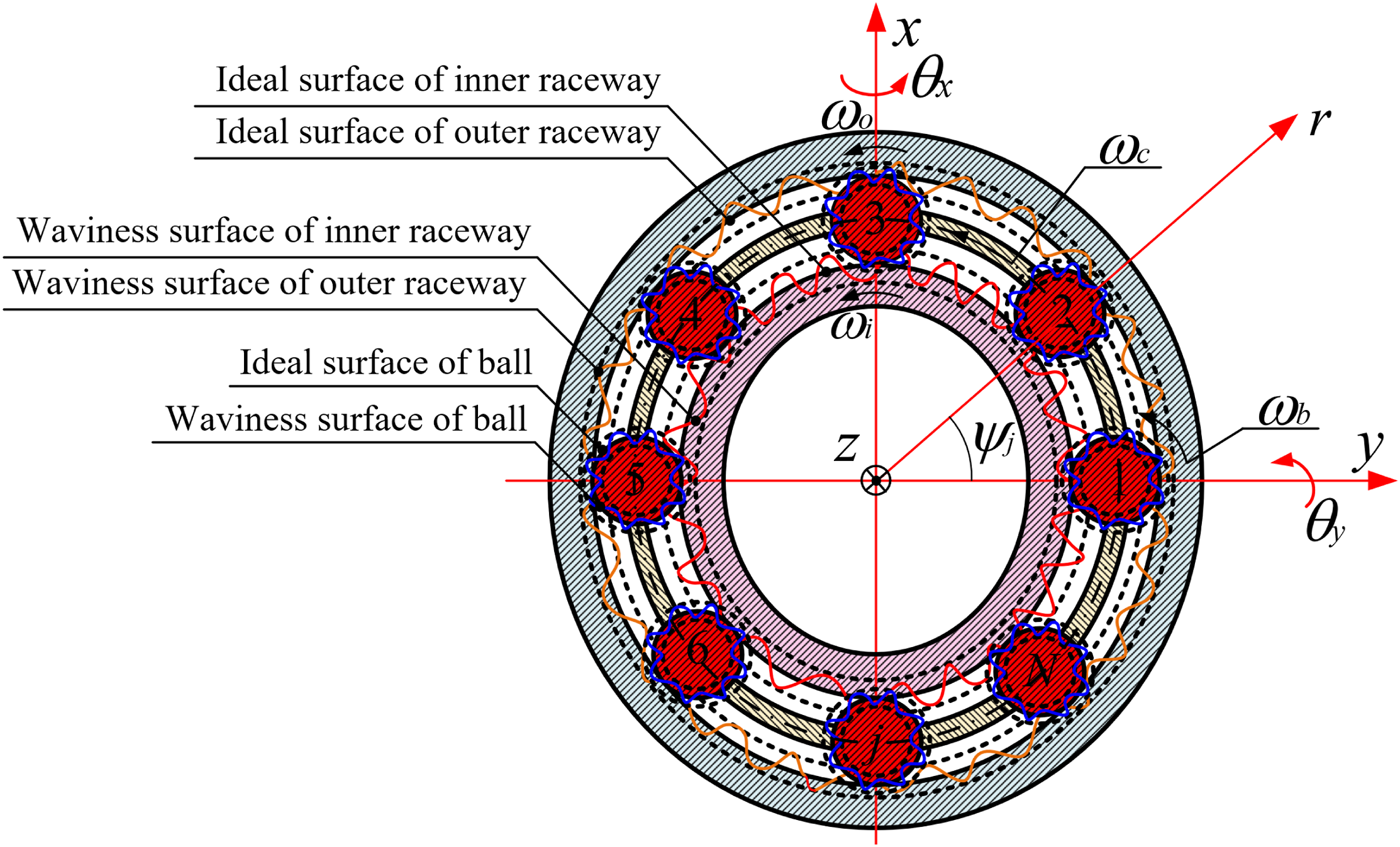
For convenience, the assumption must be determined as follows: the waviness varies periodically by means along a circumferential direction. According to the existing literature,
3
the waviness modelling of angular contact ball bearing is described by applying the superposition of cosine functions. The geometric structure of waviness modelling can be seen in Figure 3. The waviness modelling of angular contact ball bearing.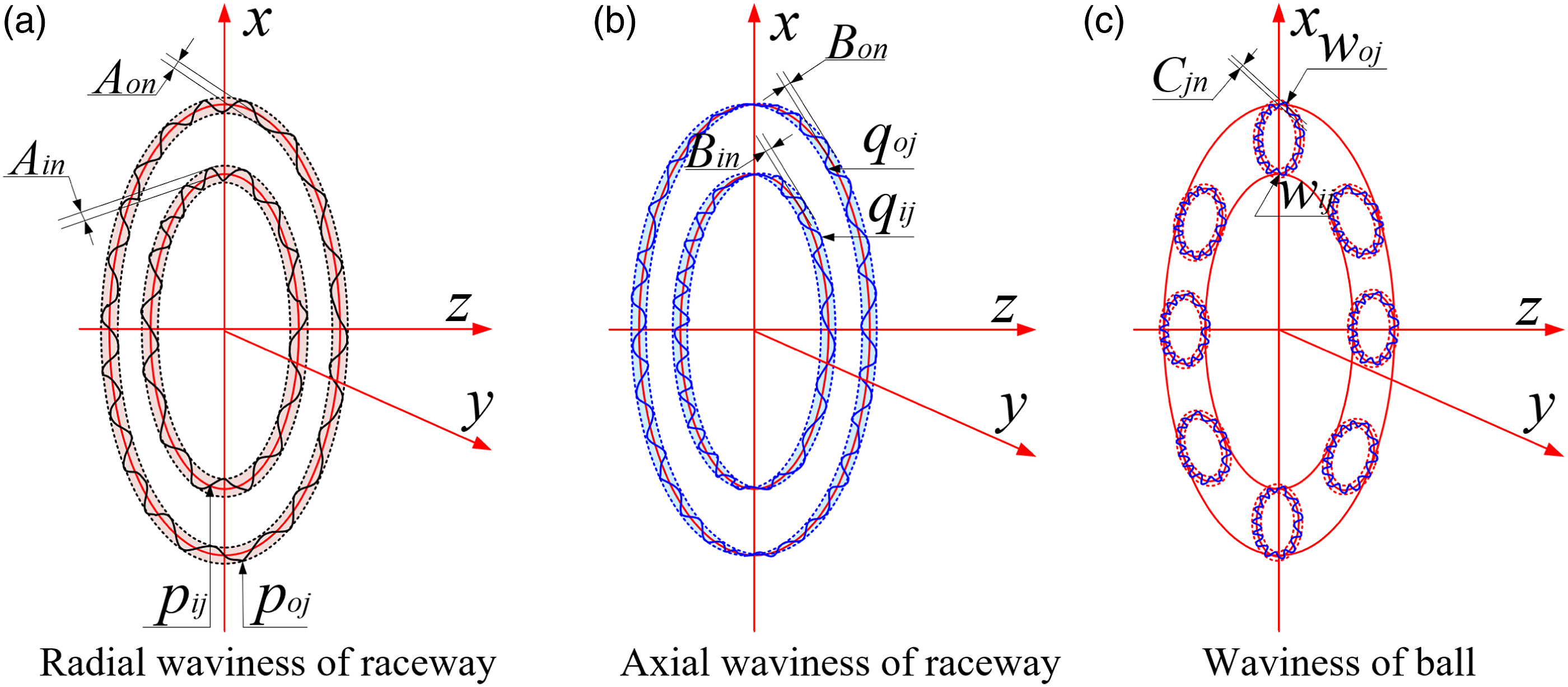
For inner raceway waviness, the mathematical expressions of radial and axial waviness can be written as follows



The mathematical modelling of elastic deflection
Before the geometric analysis of internal structure of angular contact ball bearing, the elastic deflection of angular contact ball bearing due to rotation needs to be determined firstly. The elastic deflection of angular contact ball bearing is mainly reflected in the variation of relative displacement vector of inner and outer raceway curvature centers. In this section, the above relative displacement vector will be deduced by using vector method. In order to describe the above derivation process, the relative position relationship of internal structure of angular contact ball bearing is shown in Figure 4. The relative position relationship of internal structure of angular contact ball bearing.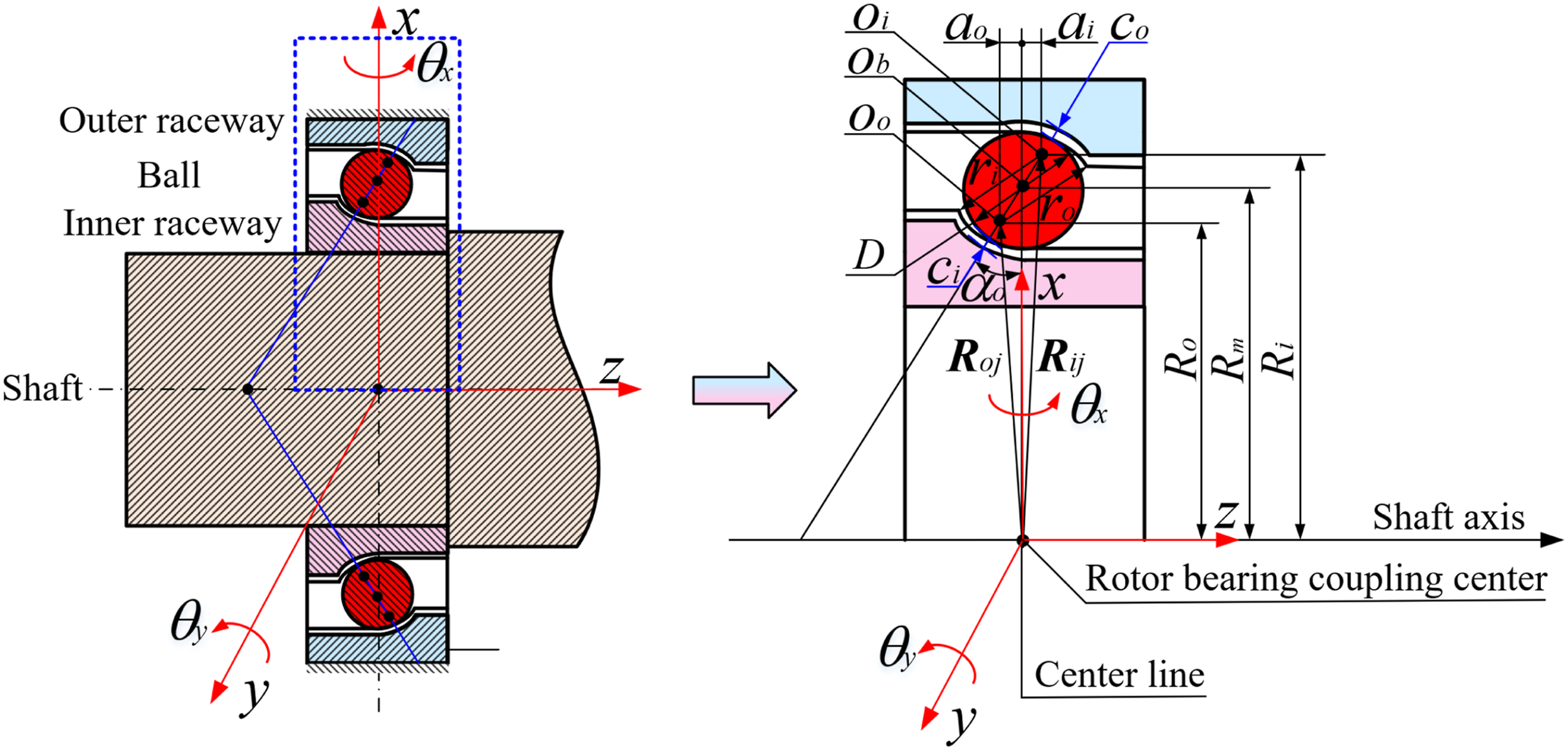
For the subsequent equation derivation, the symbols of Figure 4 need to be interpreted as follows: o
i
, o
b
, and o
o
express the inner raceway curvature center, ball center, and outer raceway curvature center. R
i
and R
o
denote the radial distance between inner and outer raceway curvature centers and shaft axis; a
i
and a
o
represent the axial distance between inner and outer raceway curvature centers and center line; c
i
and c
o
express the radial clearance between ball and inner and outer raceway; r
i
and r
o
denote the curvature radius of inner and outer raceway; α
o
is initial contact angle and R
m
is pitch diameter; and d
B
denotes bearing width.
The mathematical expressions of R
i
and R
o
are written as follows


The mathematical forms of The diagram of Euler transformation. (a) Rotation about the x axis (b) Rotation about the y axis.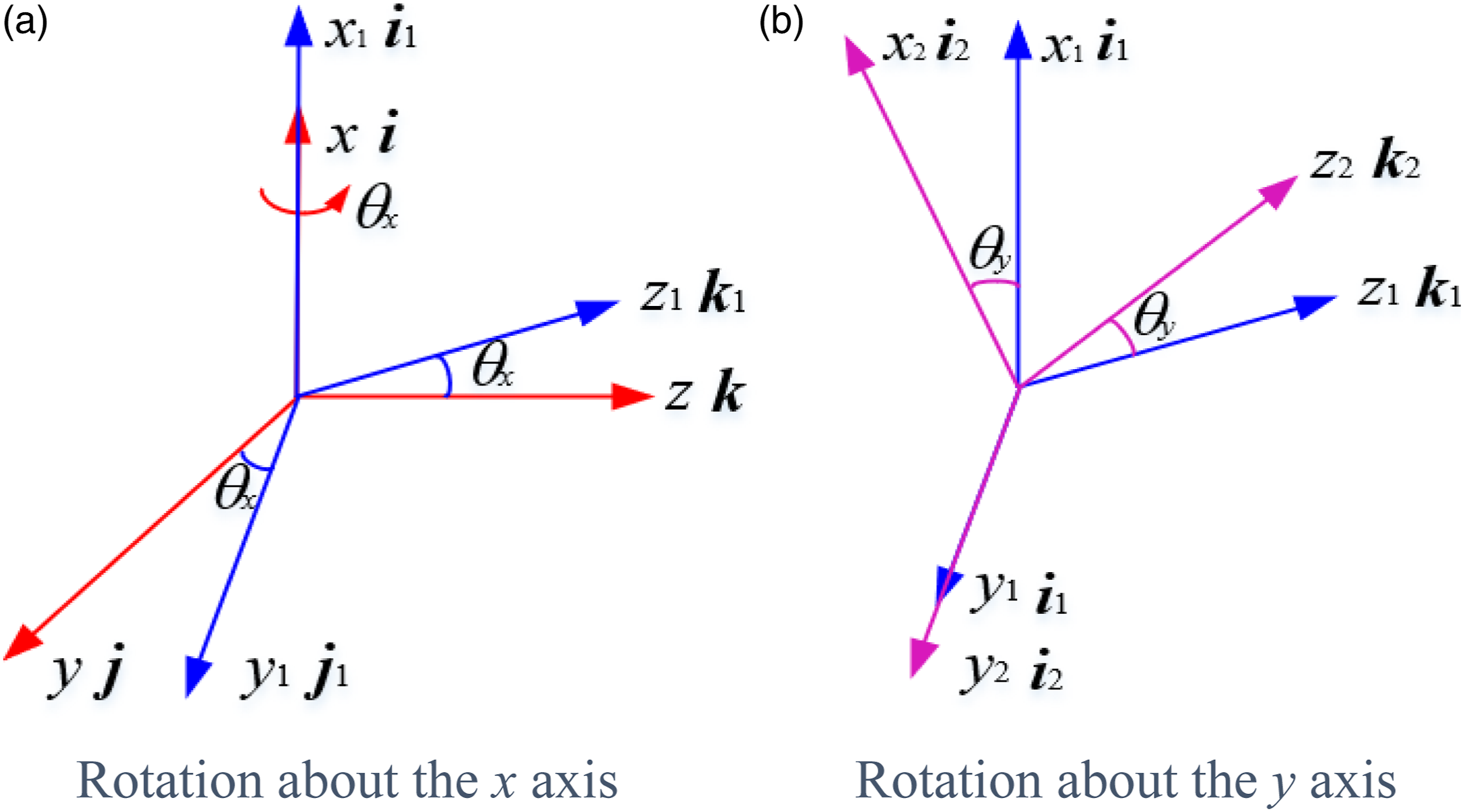


The mathematical expression of revised location vector of inner raceway curvature center is derived as follows: based on the small angular displacement assumption, the location vector R
ij
is transformed as the following form under the effect of angular displacement θ
x








The mathematical modelling of geometric analysis
In this section, the geometric analysis of internal structure of angular contact ball bearing is carried out. The above geometric analysis is reflected in the variation tendency of relative location relationship of ball center and inner and outer raceway curvature centers. In order to investigate the variation tendency of the above three centers intuitively, the diagram of relative position relationship between the jth ball and raceway is shown as Figure 6. The relative position relationship between the jth ball and raceway.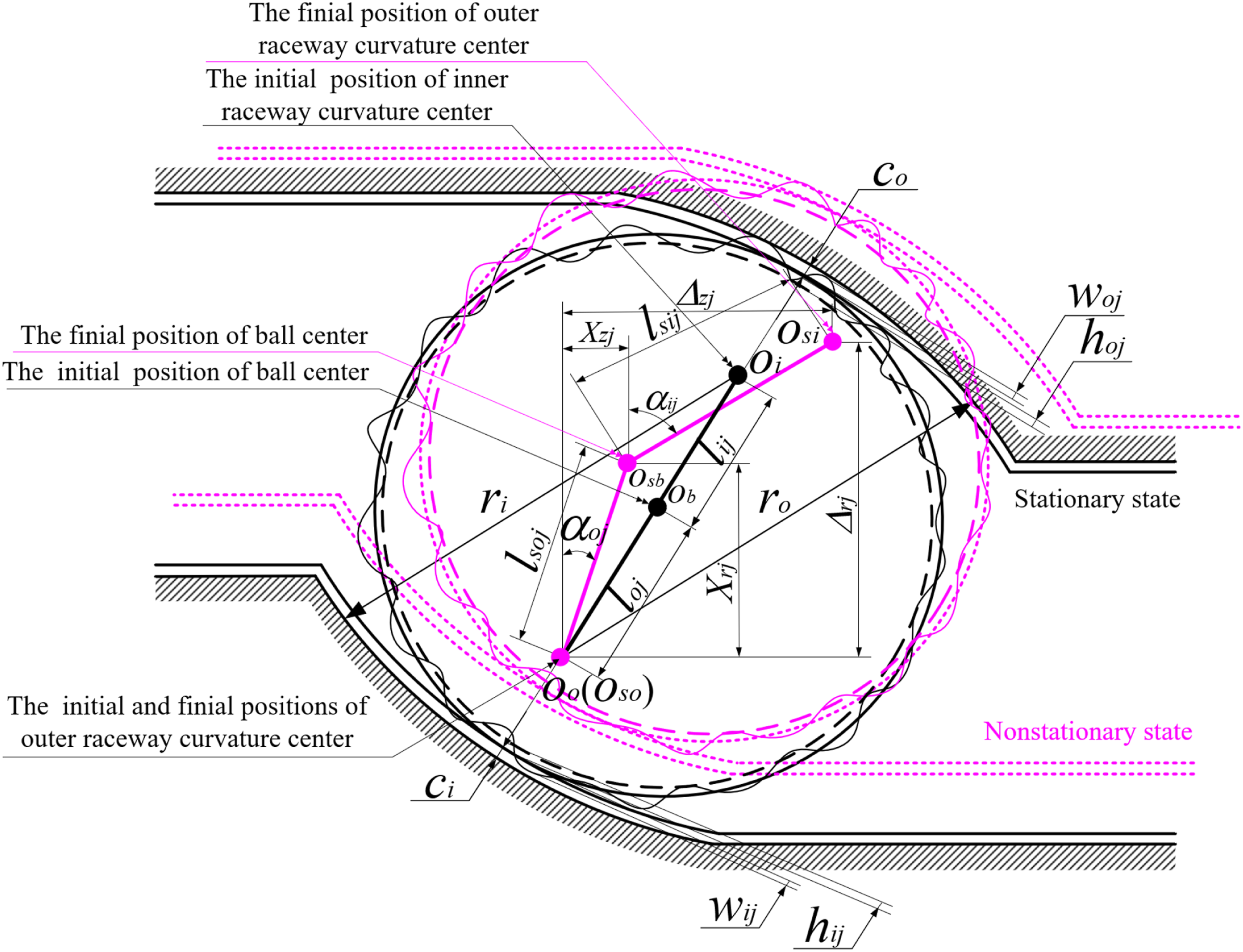
As one can see from Figure 6, the ball center and inner and outer raceway curvature centers are collinear when the angular contact ball bearing is at stationary state. The above three centers are not collinear when the angular contact ball bearing is at nonstationary state; the location of ball center and inner raceway curvature center will move due to the appearance of centrifugal force and gyroscopic moment. The symbols of O
sb
and O
si
denote the final positions of ball center and inner raceway curvature center. The mathematical expression of the initial distance between ball center and inner and outer raceway curvature centers can be written as follows


The mathematical expression of the finial distance between ball center and inner and outer raceway curvature centers can be written as follows



The mathematical modelling of force analysis
In order to study the interaction force of internal structure of angular contact ball bearing, the mathematical modelling of force analysis needs to be performed. The jth ball and inner raceway and outer raceway are selected as objective, and the schematic diagram of force analysis is shown in Figure 7. As shown in Figure 7, the symbols of Q
ni
and Q
no
denote contact force between the jth ball and the inner and outer raceway; the mathematical expressions of Q
ni
and Q
no
can be ascertained as the following form according to the nonlinear Hertz contact theory The schematic diagram of force analysis.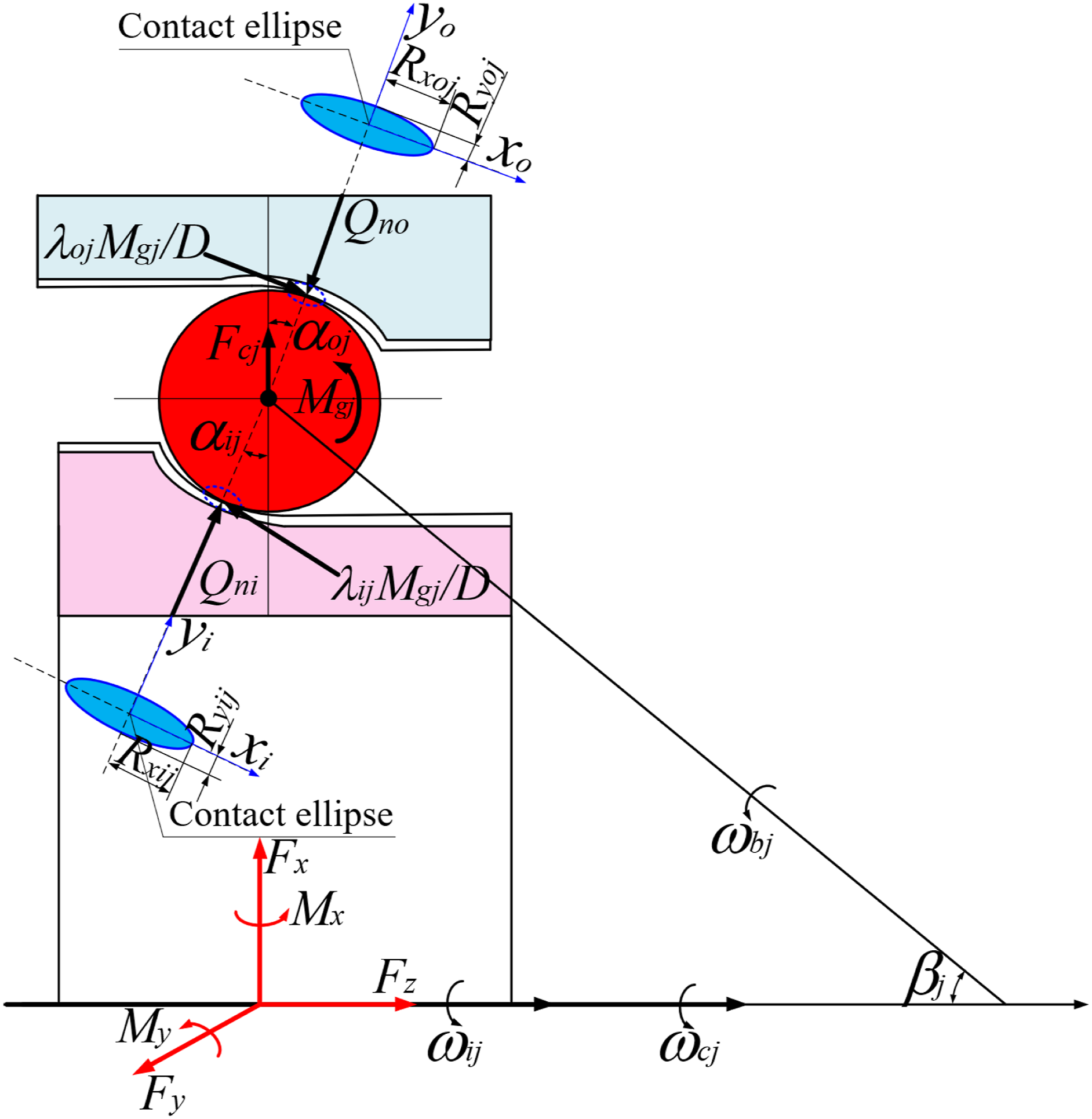



The ω
cj
and ω
bj
denote the angular velocities of revolution and rotation of the jth ball; the corresponding mathematical expressions are determined as the following form according to the inner raceway control theory




According to the above force analysis, a set of nonlinear equilibrium equations with regard to the jth ball can be expressed as the following form


The solution of mathematical modelling
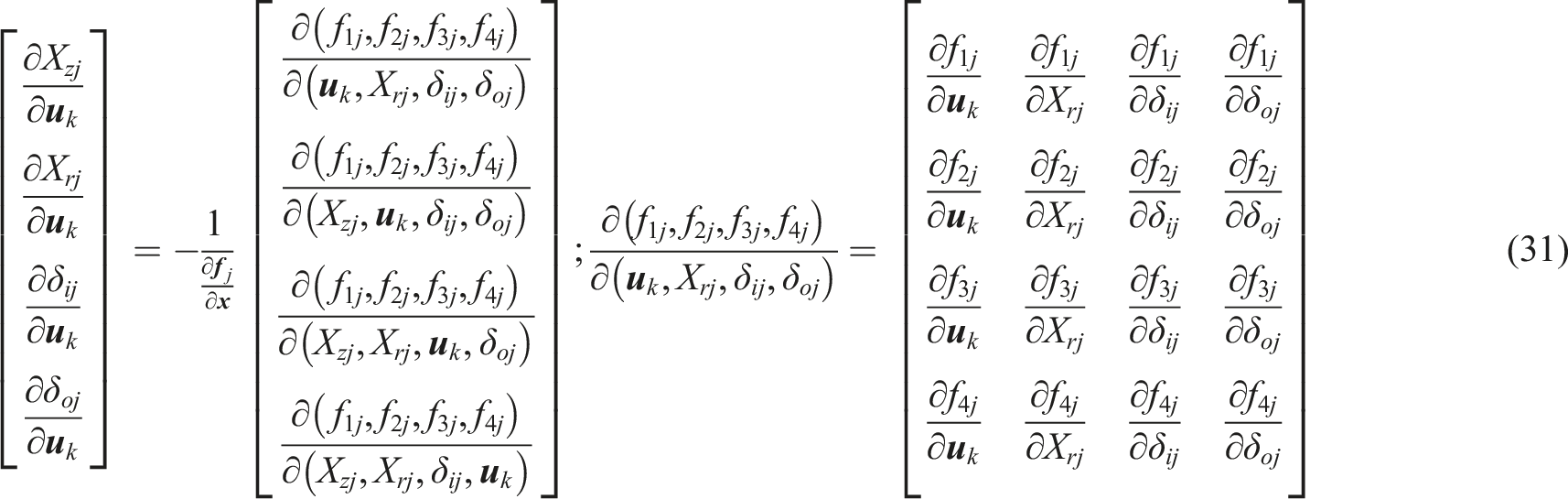
Based on the above discussion, the mathematical modelling of angular contact ball bearing with waviness has been established. The solution process of the above mathematical modelling can be summarized as two steps. First of all, the local nonlinear equilibrium equations including equations (19), (29) are solved by using improved Newton–Raphson iterative method for determining the local variables X
rj
, X
zj
, δ
ij
, and δ
oj
. Then, the global nonlinear equilibrium equation (30) is solved by employing improved Newton–Raphson iterative method again for determining the global variables δ
x
, δ
y
, δ
z
, θ
x
, and θ
y
. Meanwhile, it is worth mentioning that the local variables X
rj
, X
zj
, δ
ij
, and δ
oj
and the global variables δ
x
, δ
y
, δ
z
, θ
x
, and θ
y
have an implicit relationship; the implicit relationship plays important role in the solution of mathematical modelling and the corresponding mathematical derivation process is shown as follows
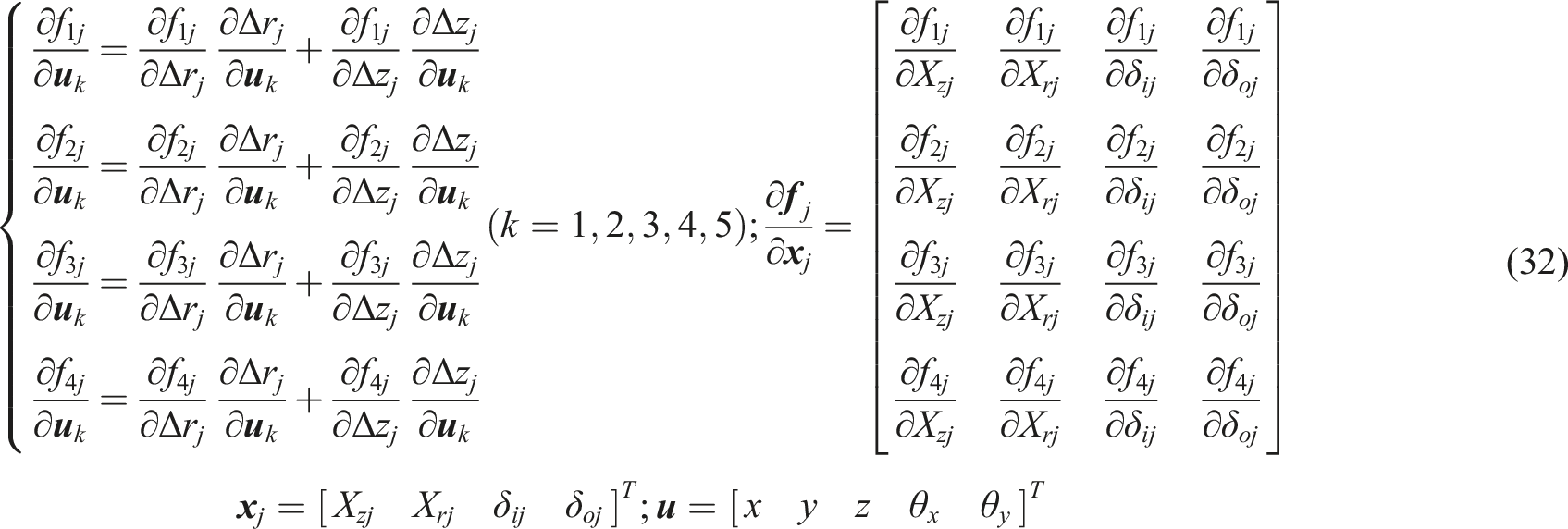
Compared with traditional Newton–Raphson iteration method, the improved Newton–Raphson iteration method introduces iteration step size adjustment factor. The corresponding mathematical expressions can be written as follows The flow chart of solution of mathematical modelling.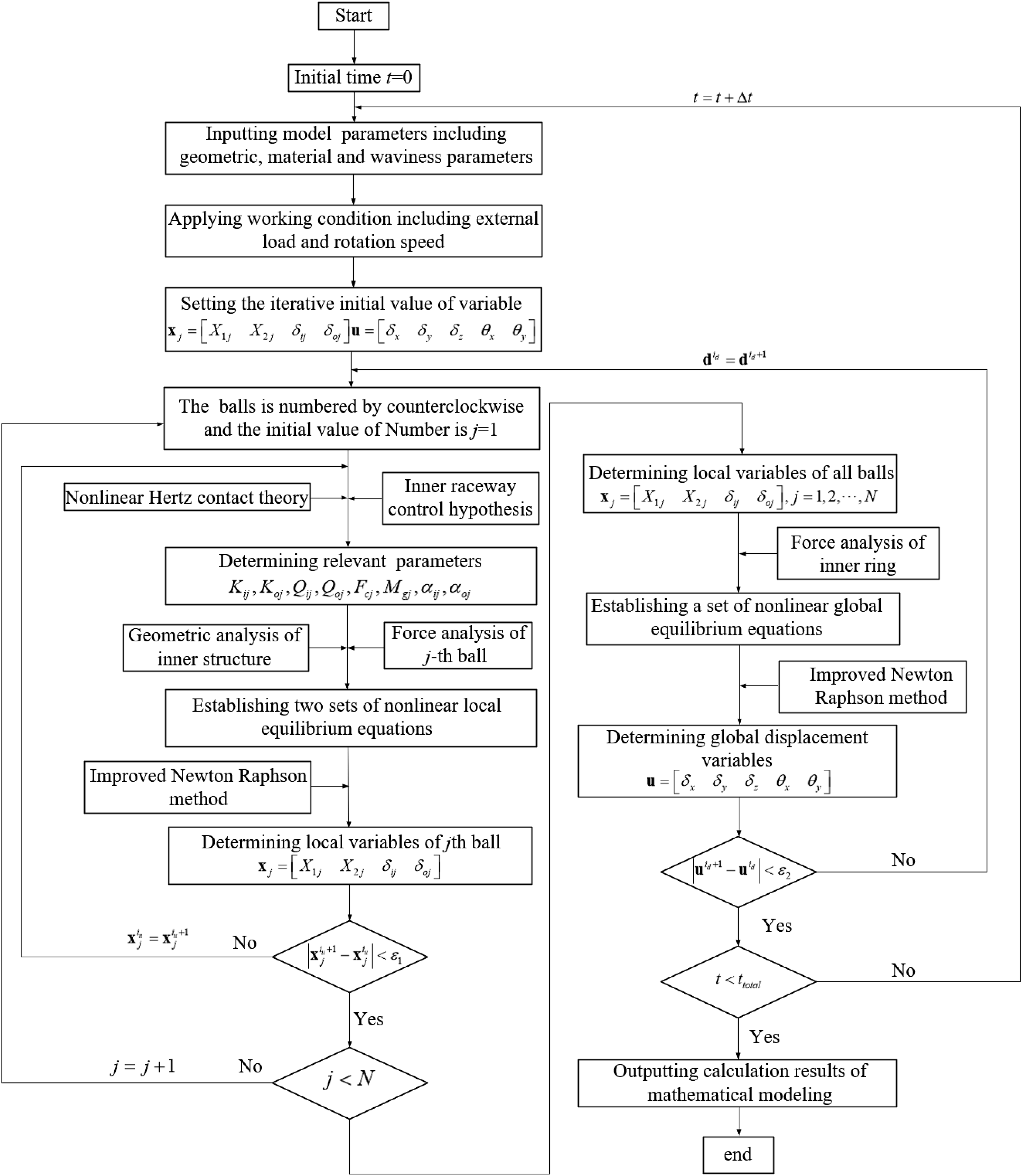


The verification of mathematical modelling
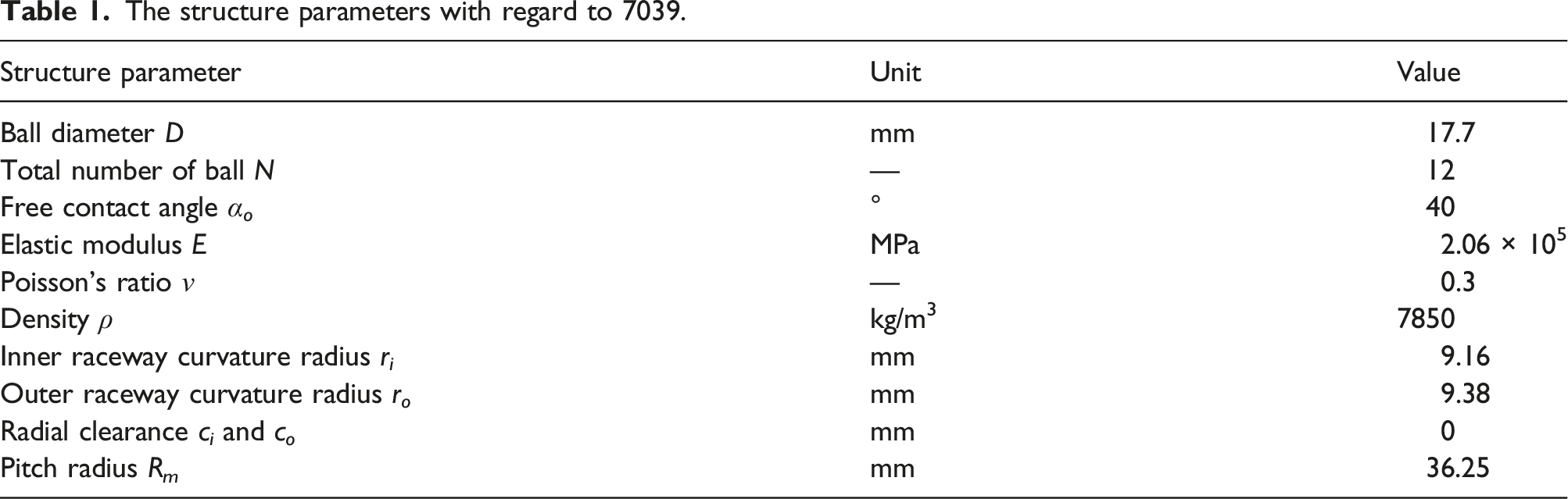
The structure parameters with regard to 7039.
Comparison results of diagonal stiffness of angular contact ball bearing subjected to external loads.

As shown in Table 2, the relative error between present and literature is defined as Error 1, and the relative error between present and experiment is defined as Error 2; the corresponding mathematical expressions are determined as the following form
From the above comparison results, it is not hard to see that the diagonal stiffness calculation results of the proposed mathematical modelling have good consistency with the corresponding experiment results come from the existing literature. Compared with the existing relative error Error 2, the maximum value of relative error Error 1 is less than 1.2%. Based on the above comparison results, it can conclude that the established mathematical modelling can be used to investigate the dynamic characteristics of angular contact ball bearing with waviness.
Results and discussion
According to the above formulation derivation and modelling verification, the validation of the established mathematical modelling of angular contact ball bearing with waviness is verified, and the above mathematical modelling can be used to analyze the nonlinear dynamic characteristics of angular contact ball bearing with waviness subjected to complex external load working conditions. The results and discussion of the established mathematical modelling can be divided into three parts in this section.
Time-varying characteristics of angular contact ball bearing under waviness
The influences of waviness including waviness order and waviness amplitude on the time-varying characteristics including time-varying contact angle, time-varying contact force, and time-varying stiffness of angular contact ball bearing are investigated systematically in this section.
The effect of raceway waviness order on the time-varying stiffness characteristics of angular contact ball bearing is analyzed firstly. For convenience, the orders of inner raceway waviness and outer raceway waviness are assumed as equal in this article. The structure parameters of angular contact ball bearing are shown in Table 1. The waviness parameters are selected as: A
in
= A
on
= B
in
= B
on
= C
jn
= 0.5 μm, ξ
in
= ξ
on
= η
in
= η
on
= γ
jn
= 0, and the maximum of ball waviness order L = 2. The external load working condition is set as F
x
= F
y
= M
x
= M
y
= 0, F
z
= 5000 N, n = 500 r/min, and c
i
=c
o
=0 m. The investigation results of raceway waviness order can be seen in Figure 9. The influence of raceway waviness order on time-varying stiffness characteristics of angular contact ball bearing. (a) Radial stiffness K
xx
(b) Radial stiffness K
yy
(c) Axial stiffness K
zz
(d) Angle stiffness K
θxθx
(e) Angle stiffness K
θyθy
.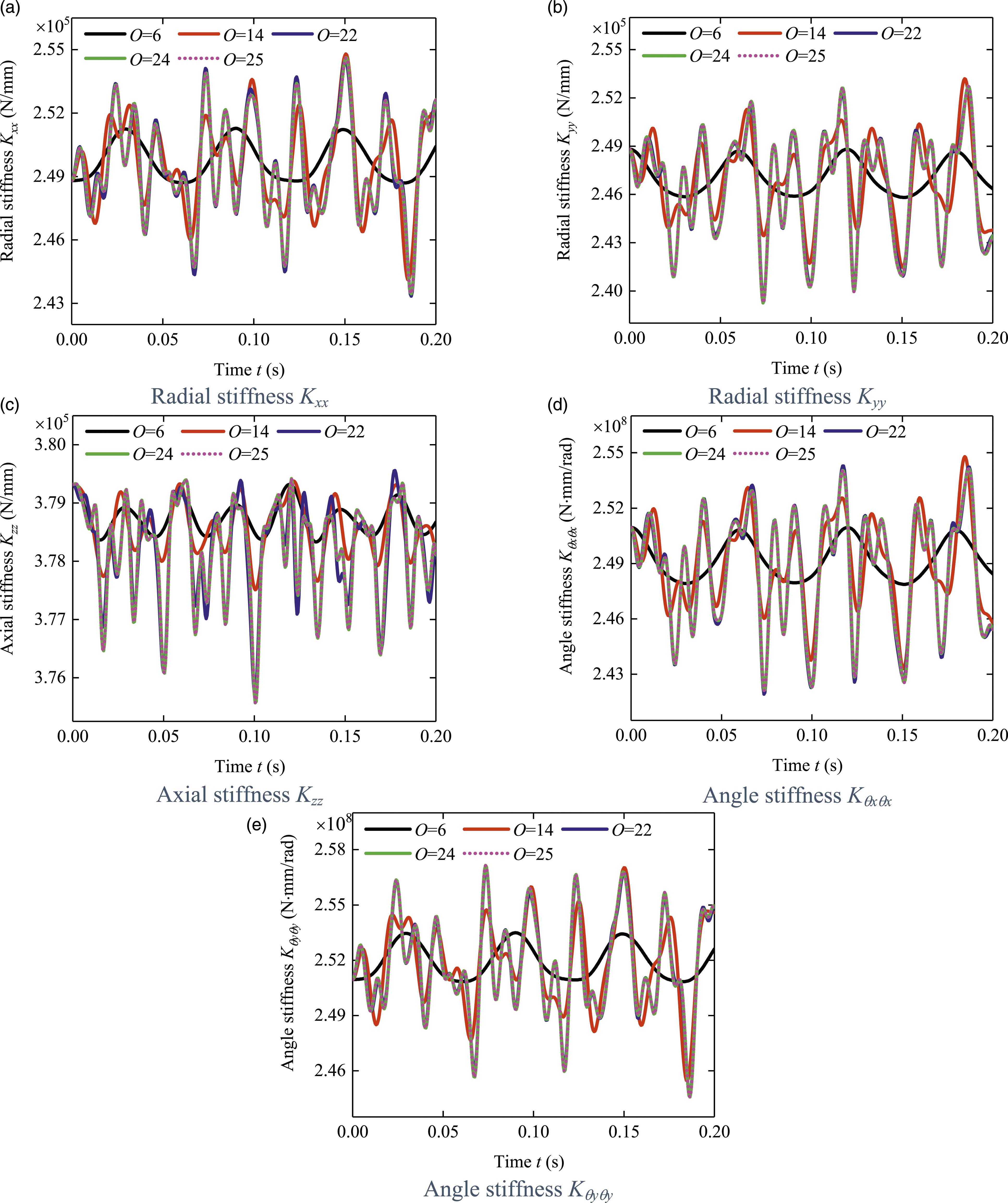
As one can see from Figure 9, when the raceway waviness order is selected as 6, the variations of time-varying radial stiffness and angle stiffness are periodical. However, the variations of time-varying radial stiffness and angle stiffness are aperiodic with raceway waviness order increased; the aperiodic of time-varying curve is reflected in the increase of numbers of peak. When the raceway waviness order is more than 24, the time-varying radial stiffness and angle stiffness keep constant basically with the raceway waviness order increased; the above phenomenon can be interpreted as the solution of mathematical modelling has converged when raceway waviness order is greater than 24. In addition, it is worth mentioning that the time-varying radial stiffness K xx and angle stiffness K θyθy have the same variation tendency; the time-varying radial stiffness K yy and angle stiffness K θxθx have the same variation tendency. The variation of time-varying axial stiffness K zz is aperiodic when the raceway waviness order is selected as 6. With the raceway waviness order increased, the variation of time-varying company of the axial stiffness K zz is the same as the time-varying radial stiffness and angle stiffness except the increase of number of peaks and the decrease of mean amplitude of time-varying axial stiffness K zz .
According to the above variation tendency of time-varying stiffness with the raceway waviness order, it can conclude that the increase of raceway waviness order has important effect on the time-varying stiffness including radial, axial, and angle stiffness and the number of peak of time-varying stiffness when the raceway waviness order is less than 24. Once the raceway waviness order is greater than 24, the time-varying stiffness keeps constant basically with the raceway waviness order increased. In other words, the raceway waviness characteristics can be reflected thoroughly when the raceway waviness order is more than 24. The time-varying radial stiffness and angle stiffness have same variation tendency with the increase of raceway waviness order in the corresponding directions. The increase of raceway waviness order will result in the number of peaks, and the mean amplitude of time-varying axial stiffness increases and decreases respectively.
Then, the influence of ball waviness order on the time-varying stiffness characteristics of angular contact ball bearing is investigated. The other parameters are the same as Figure 9 except the raceway waviness order is set as 16. The research results can be shown in Figure 10. The influence of ball waviness order on time-varying stiffness characteristics of angular contact ball bearing. (a) Radial stiffness K
xx
(b) Radial stiffness K
yy
(c) Axial stiffness K
zz
(d) Angle stiffness K
θxθx
.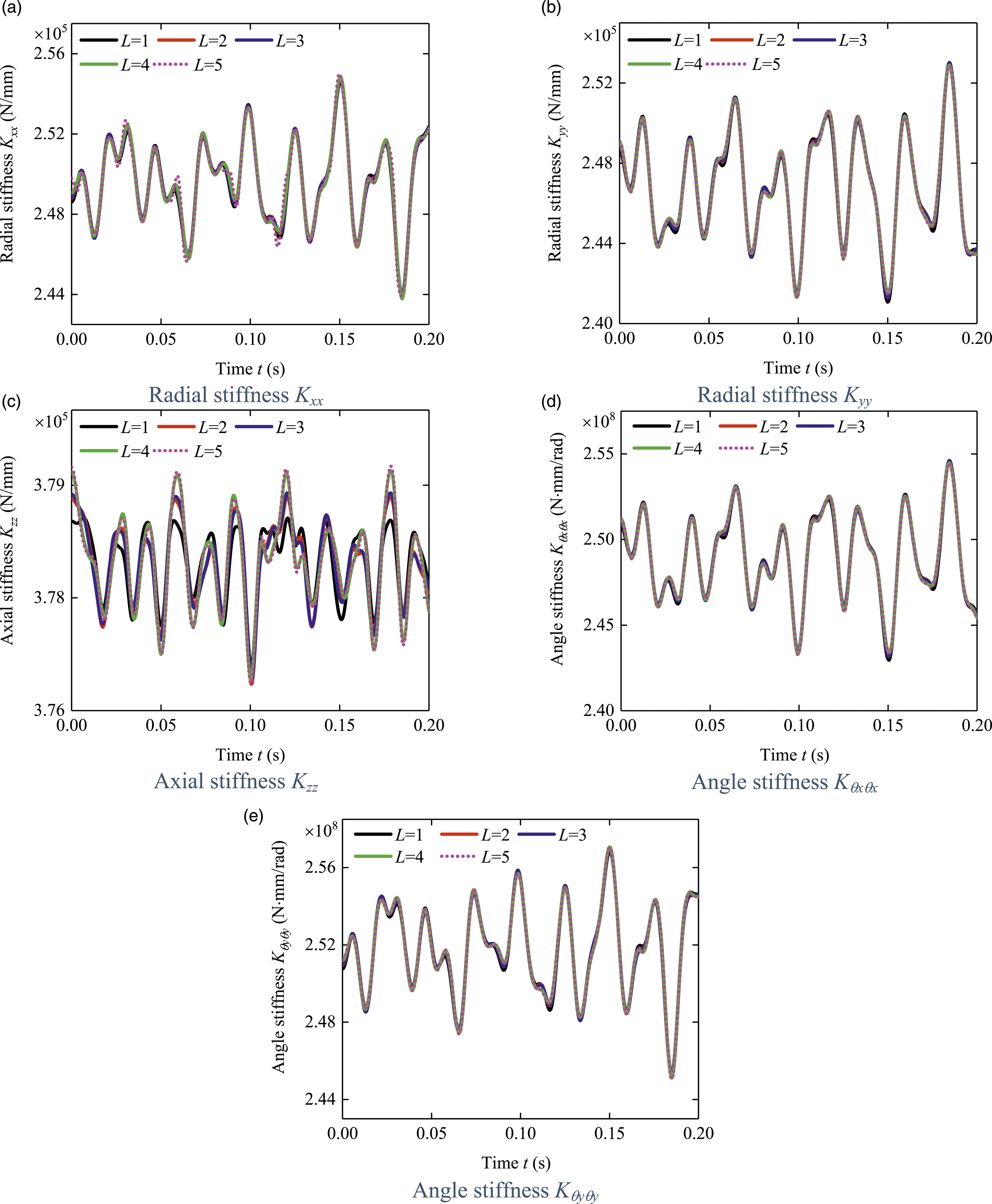
As shown in Figure 10, the time-varying stiffness including radial stiffness, axial stiffness, and angle stiffness are aperiodic. Compared with time-varying radial and angle stiffness, the time-varying curve of axial stiffness has a large number of peaks. With the ball waviness order increased, the time-varying curves of radial and angle stiffness keep constant basically. The above phenomenon can be interpreted as the solution of mathematical modelling converges easily with the ball waviness order increased. Meanwhile, it is worth noting that the time-varying radial stiffness K xx and angle stiffness K θyθy have the same variation tendency; the time-varying radial stiffness K yy and angle stiffness K θxθx have the same variation tendency. The time-varying axial stiffness K zz keeps constant basically when the ball waviness order is greater than 4. It is necessary to point out that the numbers of peak of time-varying curve of stiffness remain unchanged with the ball waviness order increased.
According to the above variation tendency of time-varying stiffness with the ball waviness order, it can conclude that the increase of raceway waviness order has slight influence on the time-varying stiffness including radial and angle stiffness and has evident influence on the time-varying axial stiffness; the influence of ball waviness order on time-varying axial stiffness is reflected on the amplitude of time-varying axial stiffness. The time-varying stiffness including radial, axial, and angle stiffness keep constant basically when the ball waviness order is more than 4. In other words, the ball waviness characteristics can be reflected thoroughly when the ball waviness order is greater than 4. The influence of ball waviness order on the number of peaks of time-varying stiffness can be neglected.
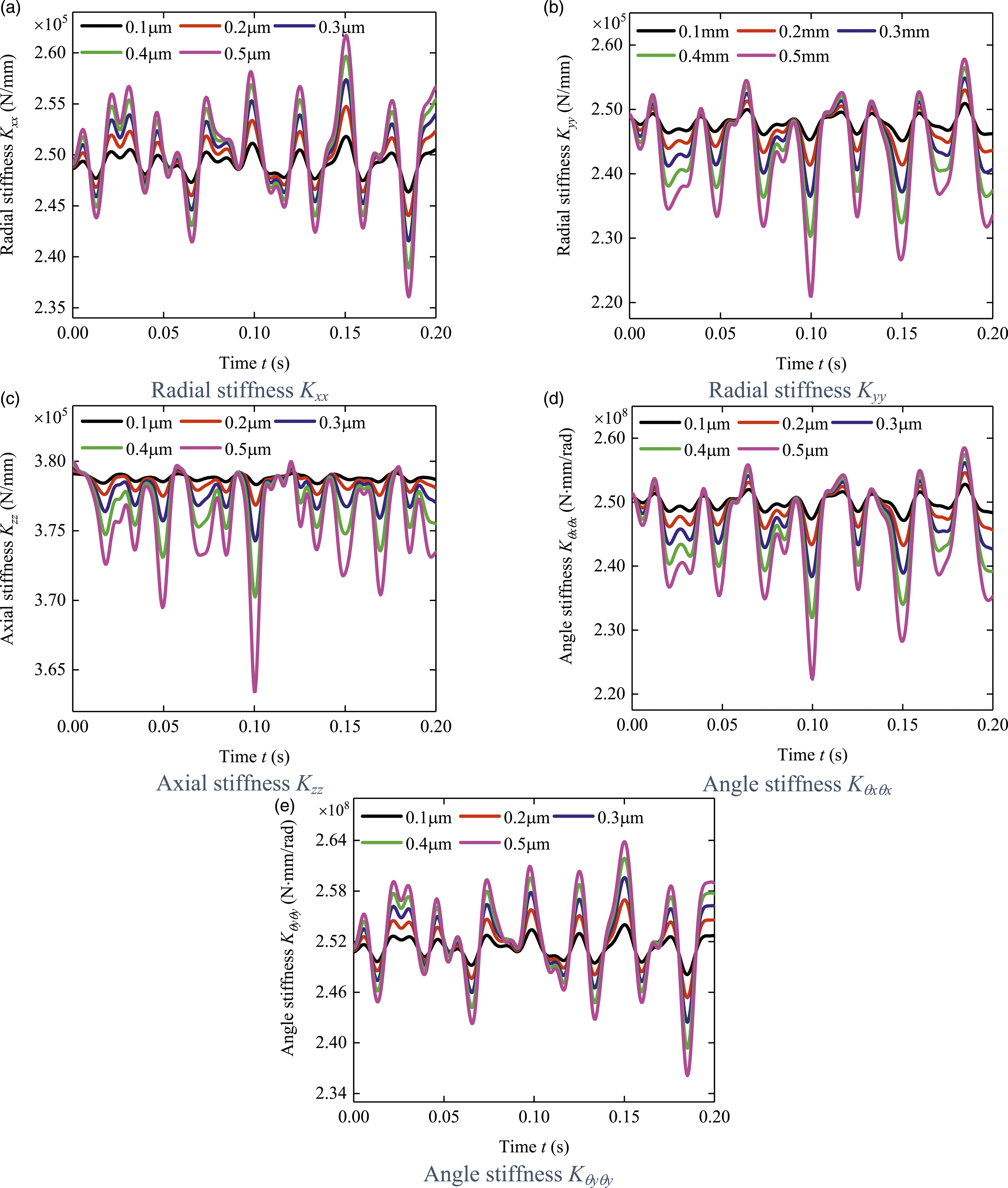
Finally, the effect of waviness amplitude on time-varying contact and stiffness characteristics of angular contact ball bearing is discussed. The other parameters are the same as Figure 9 except the raceway waviness order O is chosen as 16 and the ball waviness order L is chosen as 2. The results of time-varying contact and stiffness characteristics are shown in Figures 11 and 12, respectively. The influence of waviness amplitude on time-varying contact characteristics of angular contact ball bearing. (a) Inner raceway contact angle (b) Outer raceway contact angle (c) Inner raceway contact force (d) Outer raceway contact force. The influence of waviness amplitude on time-varying stiffness characteristics of angular contact ball bearing. (a) Radial stiffness K
xx
(b) Radial stiffness K
yy
(c) Axial stiffness K
zz
(d) Angle stiffness K
θxθx
(e) Angle stiffness K
θyθy
.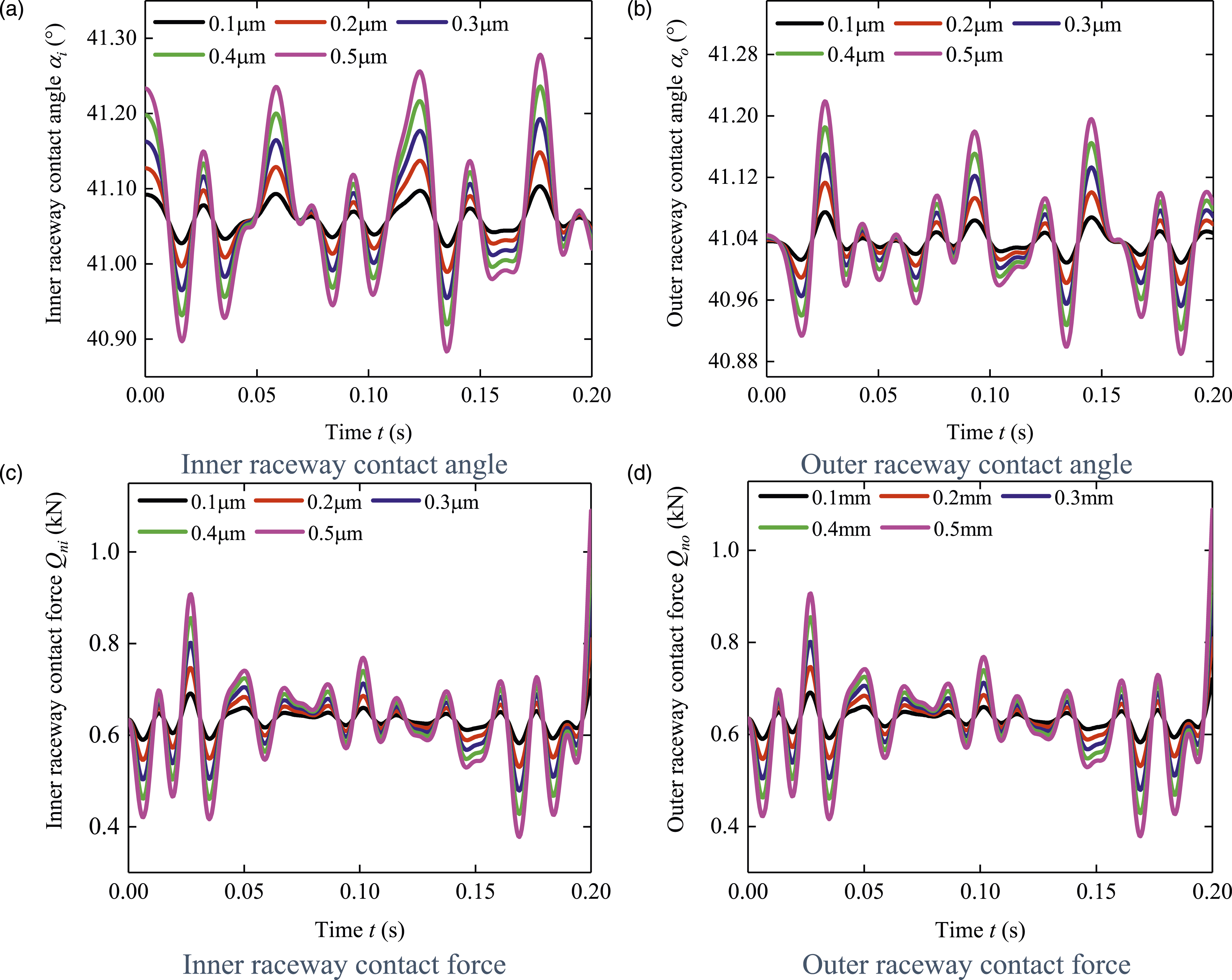
As shown in Figure 11, the time-varying inner and outer raceway contact angles are aperiodic. With the company of waviness amplitude increased, the location of peak of time-varying contact angles keeps constant basically and the amplitude of peak increases significantly. The number of peak of time-varying outer raceway contact angle is greater than the number of peak of time-varying inner raceway contact angle. The variation tendencies of time-varying contact forces including inner raceway and outer raceway contact force with time increased are the same as the variation tendencies of time-varying contact angles. In addition, it is worth noting that the variation tendencies of time-varying inner and outer raceway contact forces with time increased are consistent basically.
As one can see from Figure 12, the variation tendencies of time-varying stiffness including radial, axial, and angle stiffness are aperiodic. With the company of waviness amplitude increased, the positions of peak of time-varying radial stiffness K xx and angle stiffness K θyθy remain unchanged, the amplitude of peak of time-varying curves increases significantly, and the mean amplitudes of time-varying radial stiffness K xx and angle stiffness K θyθy enhance evidently. The variation tendencies of radial stiffness K xx and angle stiffness K θyθy are consistent. The variation tendencies of time-varying radial stiffness K yy and angle stiffness K θxθx are consistent with the time-varying radial stiffness K xx and angle stiffness K θyθy except the mean amplitudes of time-varying radial stiffness K xx and angle stiffness K θyθy decline evidently. With the waviness amplitude increased, the position of peak of time-varying axial stiffness K zz keeps constant, the amplitude of peak of time-varying curves increases significantly, and the mean amplitude of time-varying axial stiffness K zz declines significantly.
According to the investigation of the effect of waviness amplitude on time-varying contact and stiffness characteristics, it can conclude that the increase of waviness amplitude has effect evidently on the variation tendencies of time-varying contact angle, contact force, and stiffness; the influence of waviness amplitude is reflected on the amplitude of contact angle, contact force, and stiffness. The time-varying radial and angle stiffness have the same variation tendency in the corresponding directions. The increase of waviness amplitude has slight effect on the mean levels of time-varying contact angle and force. The increase of waviness amplitude will result in the mean levels of time-varying axial stiffness and time-varying radial and angle stiffness located at a particular direction decrease significantly. According to the discussion, it is necessary to point out that the waviness amplitude of angular contact ball bearing should be reduced as much as possible in the manufacturing progress.
Contact characteristics of angular contact ball bearing with waviness
The contact characteristics of angular contact ball bearing with waviness are analyzed by investigating the influences of bearing clearance, external load, and rotating speed on the circumferential variation of contact angle and load distribution of contact force of angular contact ball bearing in this section. The structure parameters of angular contact ball bearing can be seen in Table 2. The parameters of waviness modelling are selected as: A in = A on = B in = B on = C jn = 0.2 μm, ξ in = ξ on = η in = η on = γ jn = 0, raceway waviness order O = 25, and ball waviness order L = 5. In the following figures, it is necessary to point out that the top and right profiles correspond to the variation tendency of specific position on the horizontal and vertical coordinates, respectively.
Firstly, the influences of bearing clearances c
i
and c
o
on the contact characteristics including contact angle and contact force of angular contact ball bearing are discussed. The external load working conditions are assumed as: F
x
= F
y
= M
x
= M
y
= 0 N, F
z
= 5000 N, and n = 5000 r/min. The investigation results can be found in Figure 13. The effect of bearing clearance on contact characteristics of angular contact ball bearing. (a) Inner raceway contact angle (b) Outer raceway contact angle (c) Inner raceway contact force (d) Outer raceway contact force.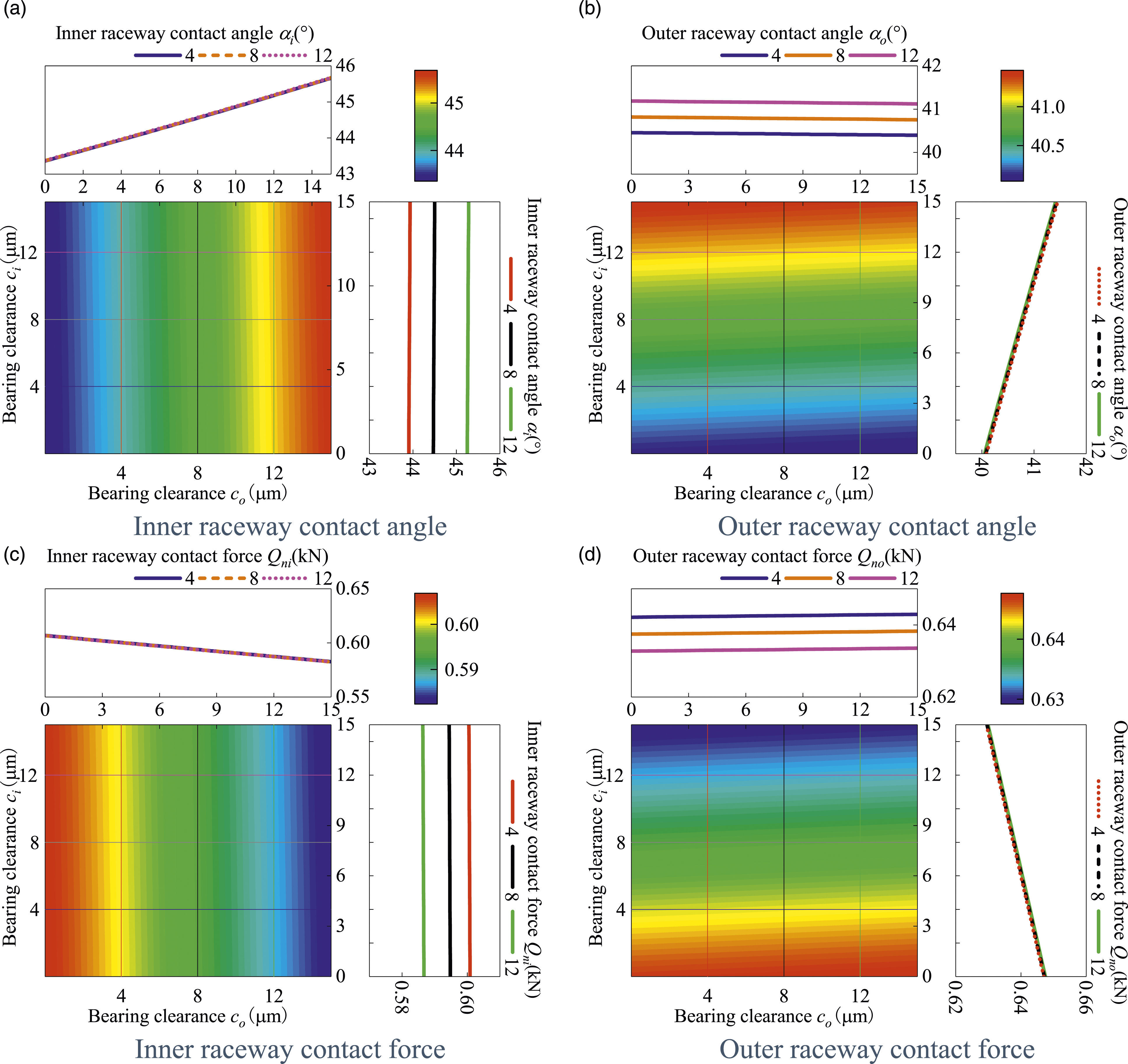
As one can see from Figure 13, with the increase of bearing clearance c i , the inner raceway contact angle keeps constant basically and the outer raceway contact angle increases evidently by means of linear; the inner raceway contact force keeps constant basically and the outer raceway contact force decreases evidently by means of linear. However, with the increase of bearing clearance c o , the inner raceway contact angle increases evidently by means of linear and the outer raceway contact angle decreases slightly. The inner raceway contact force decreases evidently by means of linear and the outer raceway contact force increases slightly.
According to the variation tendencies of contact angle and force with the bearing clearance increased, it is easy to see that the increase of bearing clearance has important effect on the opposite direction contact angle and force and have slight effect on the same direction contact angle and force; the variation tendencies of contact angle and force are linear and opposite with the increase of bearing clearance.
Secondly, the effect of rotating speed n on the contact characteristics including contact angle and contact force of angular contact ball bearing is studied. The external load working conditions are assumed as: F
x
=F
y
=M
x
=M
y
=0N, F
z
=5000 N, and c
i
=c
o
=0 m. The investigation results are shown in Figure 14. The effect of rotating speed n on contact characteristics of angular contact ball bearing. (a) Inner raceway contact angle (b) Outer raceway contact angle (c) Inner raceway contact force (d) Outer raceway contact force.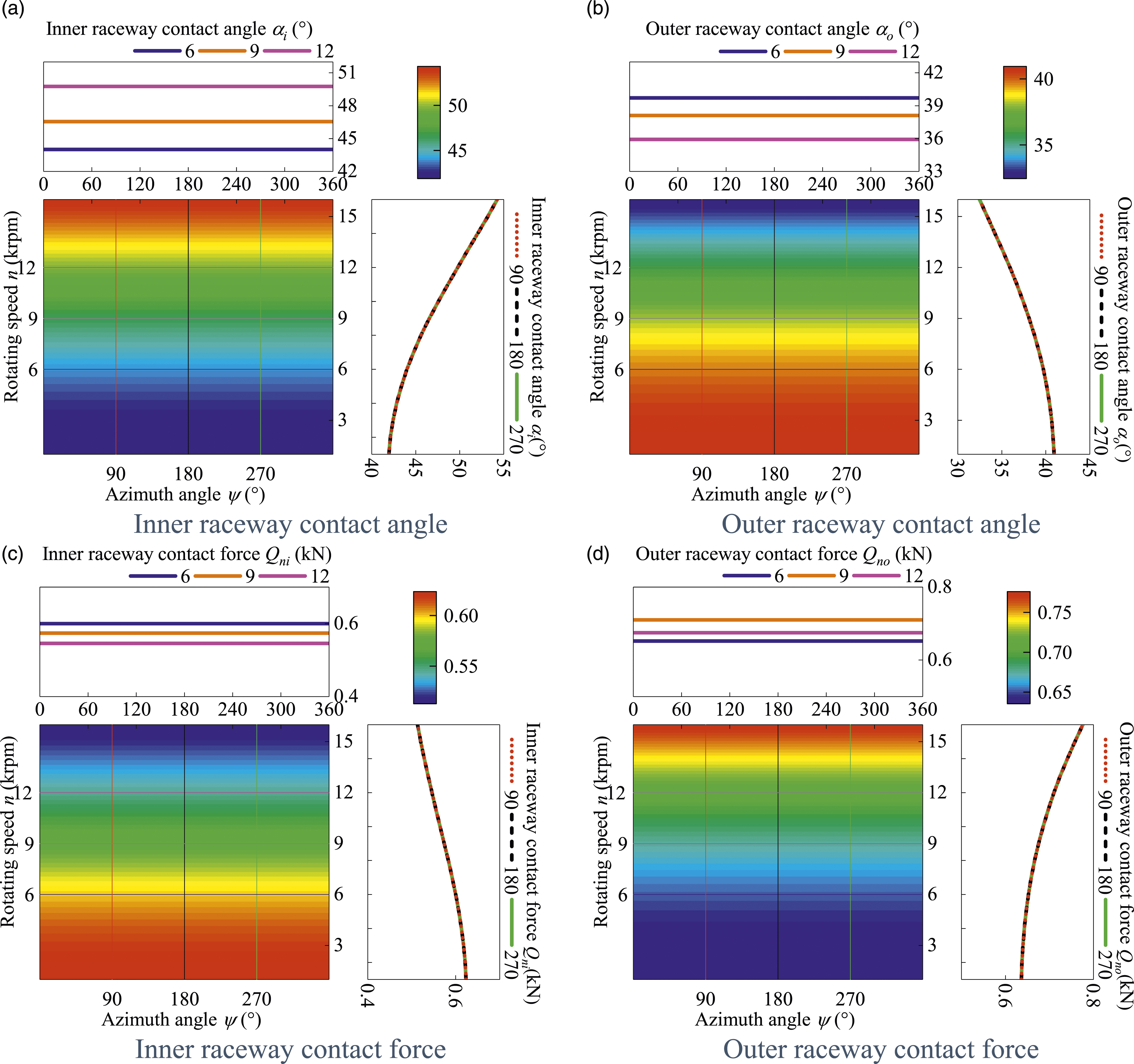
From Figure 14, it is easy to see that the variation tendencies of inner and outer raceway contact angles are opposite with rotating speed n increased, and the inner raceway contact angle and outer raceway contact angle increases and decreases by means of nonlinear, respectively. With the company of rotating speed n increased, the variation tendencies of inner and outer raceway contact forces are opposite; the inner raceway contact force and outer raceway contact force decreases and increases by means of nonlinear, respectively.
Thirdly, the influence of axial force F
z
on the contact characteristics including contact angle and contact force of angular contact ball bearing is investigated. The external load working conditions are assumed as: F
x
= F
y
= M
x
= M
y
= 0 N, n = 5000 r/min, and c
i
= c
o
= 0 m. The research results can be seen in Figure 15. The effect of axial force F
z
on contact characteristics of angular contact ball bearing. (a) Inner raceway contact angle (b) Outer raceway contact angle (c) Inner raceway contact force (d) Outer raceway contact force.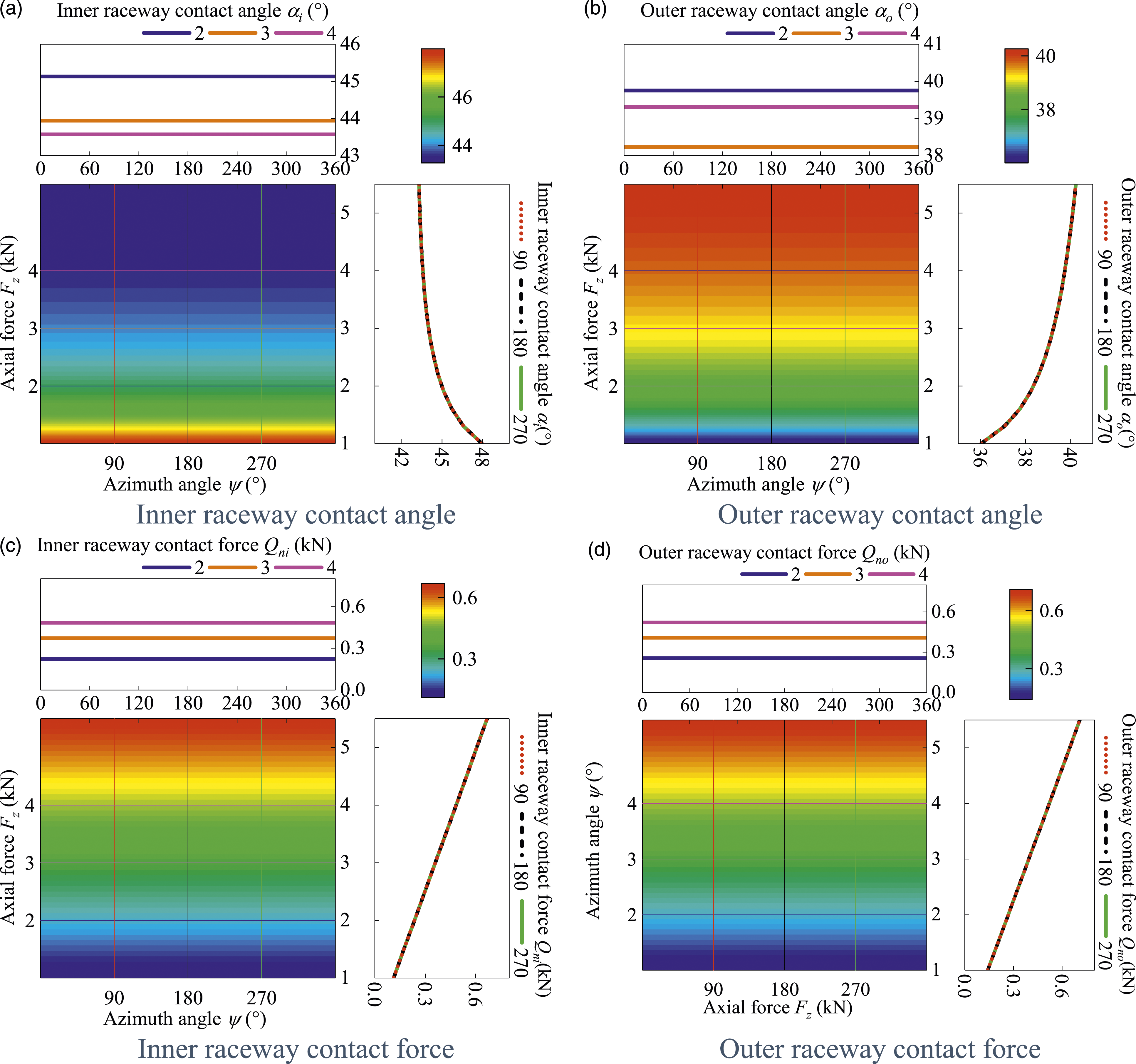
As shown in Figure 15, the variation tendencies of inner and outer raceway contact angles are opposite with axial force F z increased; the inner raceway contact angle and outer raceway contact angle decreases and increases by means of nonlinear, respectively. With the company of axial force F z increased, the inner and outer raceway contact forces increase by means of linear evidently. Meanwhile, it is worth mentioning that the above contact forces and contact angles remain unchanged with the increase of azimuth angle ψ.
Fourthly, the effect of radial force F
x
on the contact characteristics including contact angle and contact force of angular contact ball bearing is analyzed. The external load working conditions are selected as: F
y
= M
x
= M
y
= 0 N, F
z
= 5000 N, n = 5000 r/min, and c
i
= c
o
= 0 m. The investigation results are shown in Figure 16. The effect of radial force F
x
on contact characteristics of angular contact ball bearing. (a) Inner raceway contact angle (b) Outer raceway contact angle (c) Inner raceway contact force (d) Outer raceway contact force.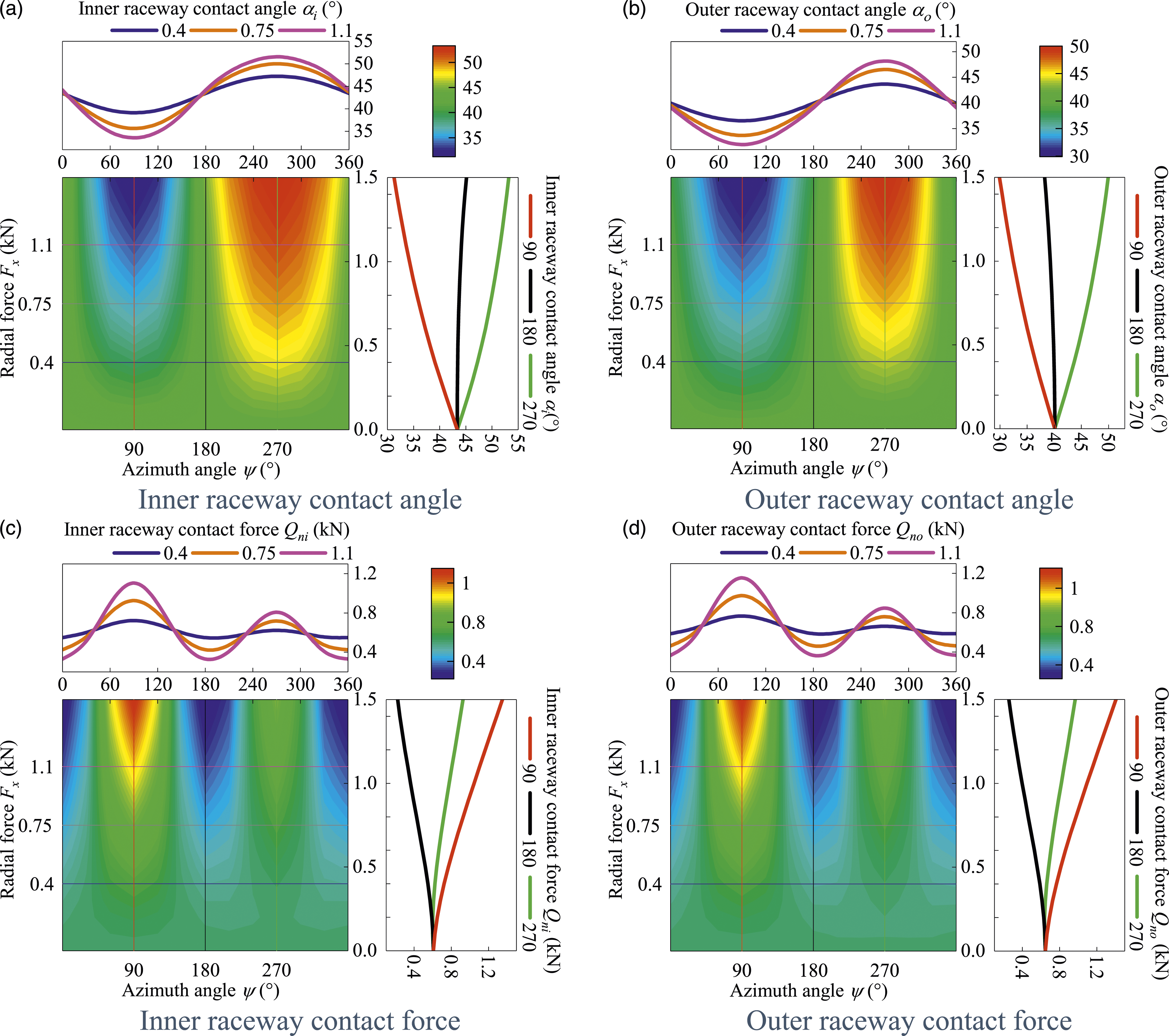
As shown in Figure 16, with the emergence of radial force F x , the inner and outer raceway contact angles vary by sinusoidal with azimuth angle increased; the above sinusoidal curves of inner and outer raceway contact angles exist a phase difference. However, the inner and outer raceway contact forces vary by cosine of variable amplitude with azimuth angle increased; the above cosine curves of variable amplitude of inner and outer raceway contact forces are synchronized basically. With the company of radial force F x increased, the inner and outer raceway contact angles decrease first and then increase with the azimuth angle increased (from 90° to 270°), the amplitudes of sinusoidal curve of inner and outer raceway contact angles increase evidently, the inner and outer raceway contact forces increase first, then decrease and finally increase with the azimuth angle increased (from 90° to 270°), and the amplitudes of cosine curve of variable amplitude of inner and outer raceway contact forces increase obviously.
Fifthly, the influence of radial force F
y
on the contact characteristics including contact angle and contact force of angular contact ball bearing is studied. The external load working conditions are selected as: F
x
=M
x
=M
y
=0 N, F
z
=5000 N, n=5000 r/min, and c
i
=c
o
=0 m. The investigation results are seen in Figure 17. The effect of radial force F
y
on contact characteristics of angular contact ball bearing. (a) Inner raceway contact angle (b) Outer raceway contact angle (c) Inner raceway contact force (d) Outer raceway contact force.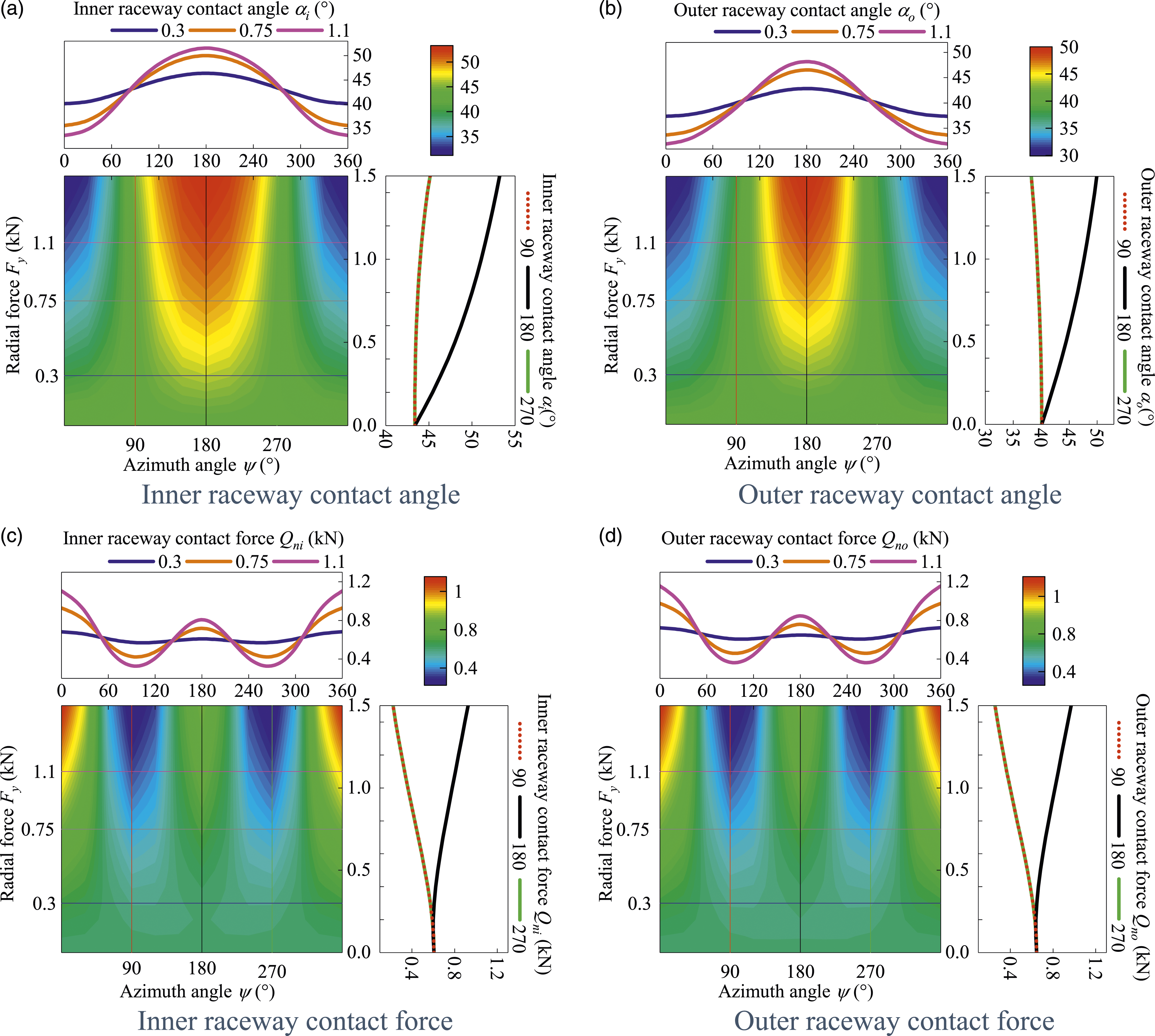
As seen in Figure 17, with the appearance of radial force F y , the inner and outer raceway contact angles vary by cosine with the azimuth angle increased, and the above cosine curves of inner and outer raceway contact angles exist phase difference slightly. However, the inner and outer raceway contact forces vary by “W” curve with the azimuth angle increased, and the “W” curves of inner and outer raceway contact forces are synchronized basically. With the company of radial force F x increased, the inner and outer raceway contact angles decrease first, then increase, and finally decrease with the azimuth angle increased (from 90° to 270°), the amplitudes of cosine curve of inner and outer raceway contact angles increase evidently, the inner and outer raceway contact forces decrease first, then increase, and finally decrease with azimuth angle increased (from 90° to 270°), and the amplitudes of “W” curve of inner and outer raceway contact forces increase evidently.
Sixthly, the effect of torque M
x
on the contact characteristics including contact angle and contact force of angular contact ball bearing is discussed. The external load working conditions are selected as: F
x
= F
y
= M
y
= 0 N, F
z
= 5000 N, n = 5000 r/min, and c
i
= c
o
=0 m. The research results can be found in Figure 18. The effect of torque M
x
on contact characteristics of angular contact ball bearing. (a) Inner raceway contact angle (b) Outer raceway contact angle (c) Inner raceway contact force (d) Outer raceway contact force.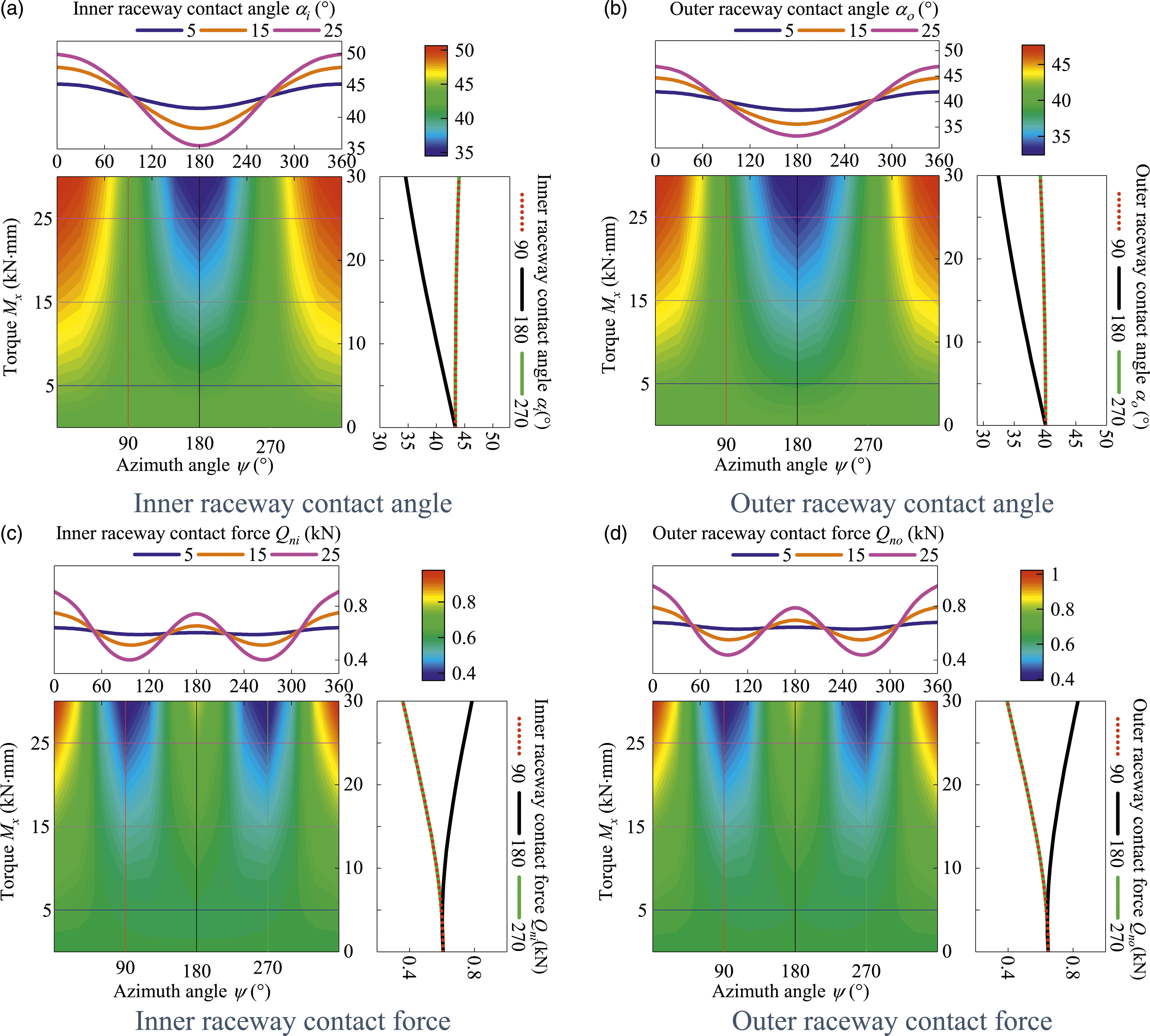
As shown in Figure 18, the variation tendencies of inner and outer raceway contact angles with the azimuth angle and torque M x increased are opposite to the corresponding results of Figure 17. The variation tendencies of inner and outer raceway contact forces with the azimuth angle and torque M x increased are consistent with the corresponding results of Figure 17.
Finally, the influence of torque M
y
on the contact characteristics including contact angle and contact force of angular contact ball bearing is researched. The external load working conditions are selected as: F
x
= F
y
= M
x
= 0 N, F
z
= 5000 N, n = 5000 r/min, and c
i
= c
o
= 0 m. The investigation results can be seen in Figure 19. The effect of torque M
y
on contact characteristics of angular contact ball bearing. (a) Inner raceway contact angle (b) Outer raceway contact angle (c) Inner raceway contact force (d) Outer raceway contact force.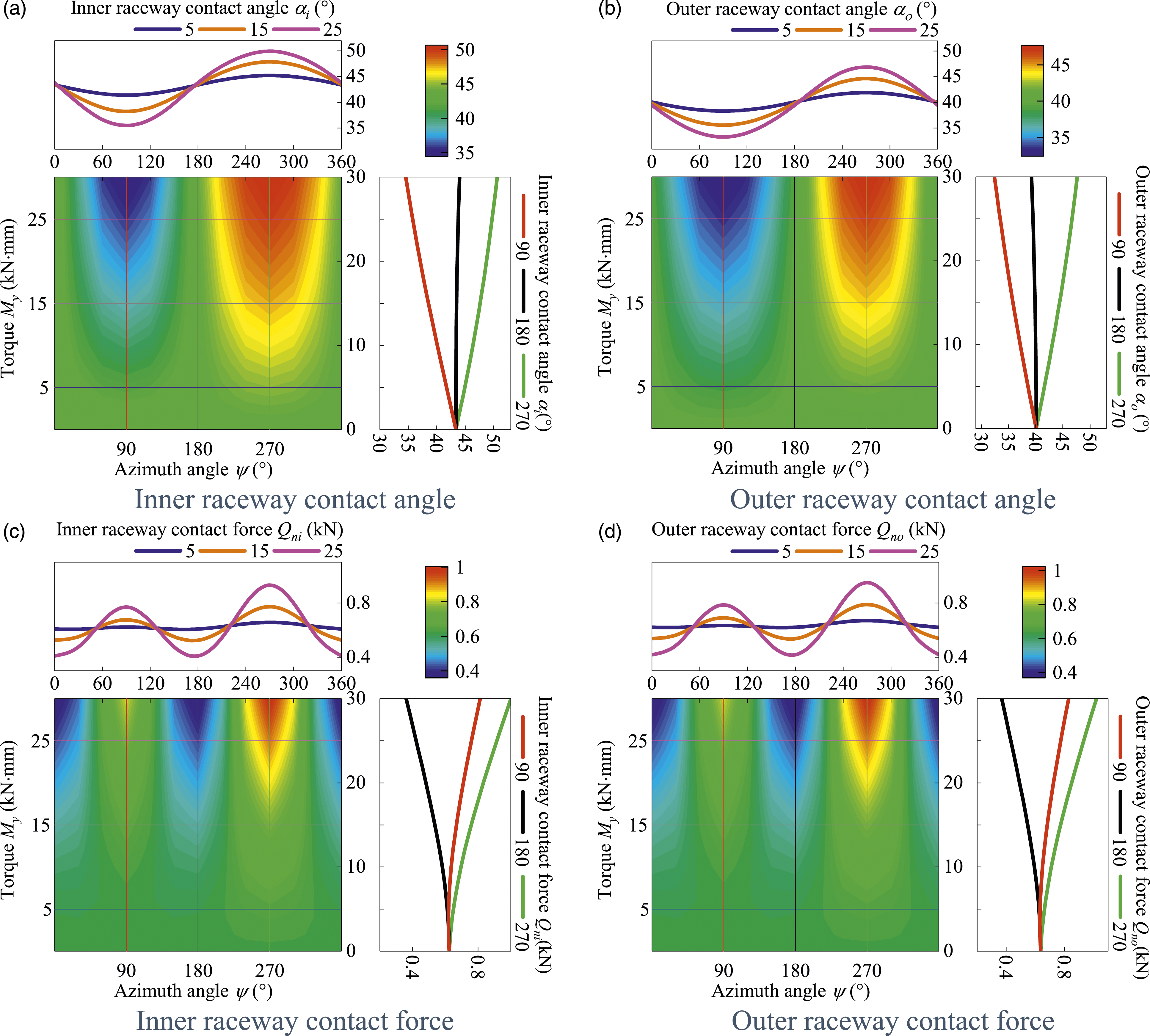
As seen in Figure 19, the variation tendencies of inner and outer raceway contact angles with azimuth angle and torque M y increased are consistent with the corresponding results of Figure 16 basically. The variation tendencies of inner and outer raceway contact forces with the azimuth angle and torque M y increased are symmetric to the corresponding results of about 180° as shown in Figure 16.
According to the above variation tendencies of contact angle and force, the effects of rotating speed on contact angles and forces are nonlinear and opposite, and the above opposite variation tendencies are reflected on the types of raceway and contact; The increase of axial force has no effect on the azimuth distributions of contact angles and forces, has important effect on the contact angles and forces, and the variation tendencies of contact angles are nonlinear and opposite, however, the variation tendencies of contact forces are linear and consistent. The increases of radial force and torque have evident influence on the azimuth distributions of contact angles and forces; the appearances of radial force and torque result in the contact angles, and forces vary by means of sine, cosine “W” curves. There are some poles and stationary points in the above curves; the poles and stationary points can be interpreted as the maximum and minimum points and the intersection points of the above curves. respectively. With the increase of external loads including radial forces and torques, the contact angles and forces decrease or increase by means of nonlinear.
Stiffness characteristics of angular contact ball bearing with waviness
The stiffness characteristics of angular contact ball bearing with waviness are investigated by analyzing the effects of bearing clearance, external loads, and rotating speed on the diagonal stiffness of angular contact ball bearing in this section. The structure parameters of angular contact ball bearing can be found in Table 2. The parameters of waviness modelling are chosen as: A in = A on = B in = B on = C jn = 0.2 μm, ξ in = ξ on = η in = η on = γ jn = 0, raceway waviness order O = 25, and ball waviness order L = 5.
Firstly, the influences of bearing clearance including c
i
and c
o
on the stiffness characteristics of angular contact ball bearing are investigated. The external load working conditions are assumed as: F
x
= F
y
= M
x
= M
y
= 0 N, F
z
= 5000 N, and n = 5000 r/min. The research results are shown in Figure 20. The influence of bearing clearance on stiffness characteristics of angular contact ball bearing. (a) Radial stiffness K
xx
(b) Radial stiffness K
yy
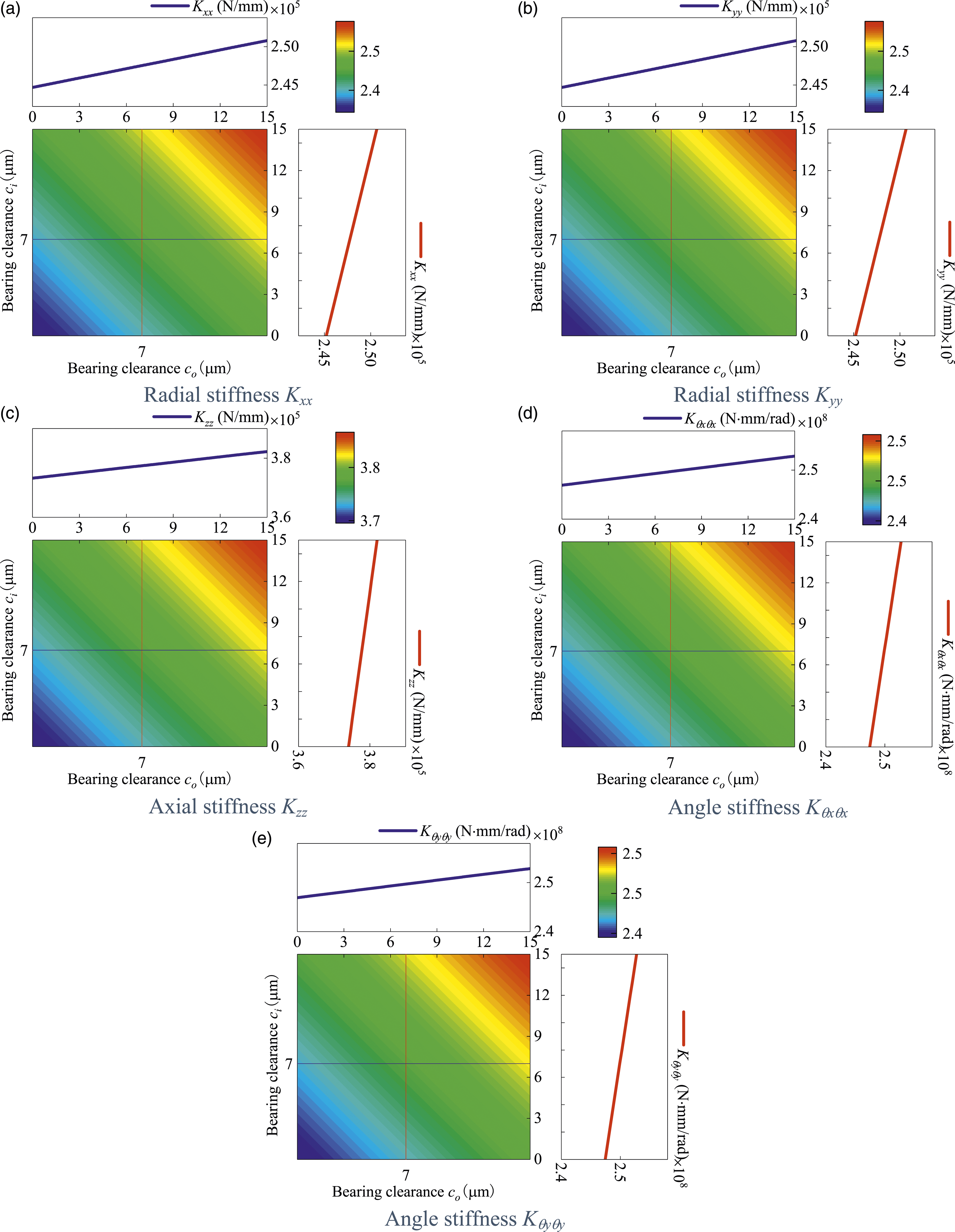
As shown in Figure 20, with the company of bearing clearance c i and c o increased, the diagonal stiffness including radial stiffness, axial stiffness, and angle stiffness increase by means of linear. Meanwhile, it is worth mentioning that the effectives of bearing clearance c i and c o are consistent basically; the increase of bearing clearance can strengthen the stiffness of angular contact ball bearing.
Finally, the influences of axial force F
z
and rotating speed n on the stiffness characteristics of angular contact ball bearing are discussed. The external load working conditions are selected as: F
x
= F
y
= M
x
= M
y
= 0 N and c
i
= c
o
= 0 m. The investigation results can be seen in Figure 21. The influences of axial force F
z
and rotating speed n on stiffness characteristics of angular contact ball bearing. (a) Radial stiffness K
xx
(b) Radial stiffness K
yy
(c) Axial stiffness K
zz
(d) Angle stiffness K
θxθx
(e) Angle stiffness K
θyθy
.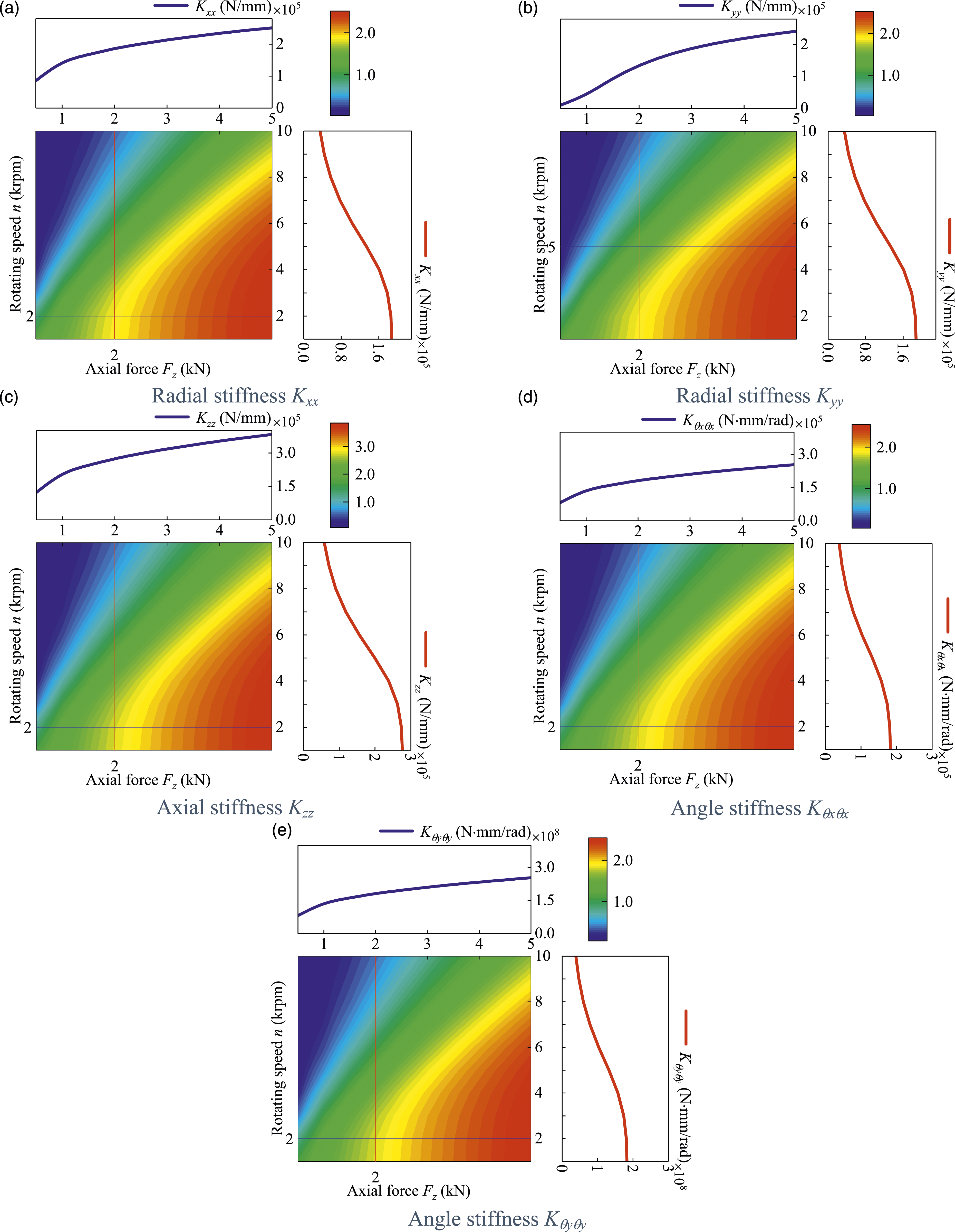
As seen in Figure 21, with the company of axial force F z increased, the stiffness including radial stiffness, axial stiffness, and angle stiffness increase evidently by means of nonlinear. However, with rotating speed n increased, the stiffness including radial stiffness, axial stiffness, and angle stiffness decrease significantly by means of nonlinear.
Secondly, the effects of radial force F
x
and F
y
on the stiffness characteristics of angular contact ball bearing are analyzed. The external load working conditions are selected as: M
x
= M
y
= 0 N, F
z
=5000 N, and n=5000 r/min, c
i
=c
o
=0 m. The research results can be seen in Figure 22. The influence of radial force on stiffness characteristics of angular contact ball bearing. (a) Radial stiffness K
xx
(b) Radial stiffness K
yy
(c) Axial stiffness K
zz
(d) Angle stiffness K
θxθx
(e) Angle stiffness K
θyθy
.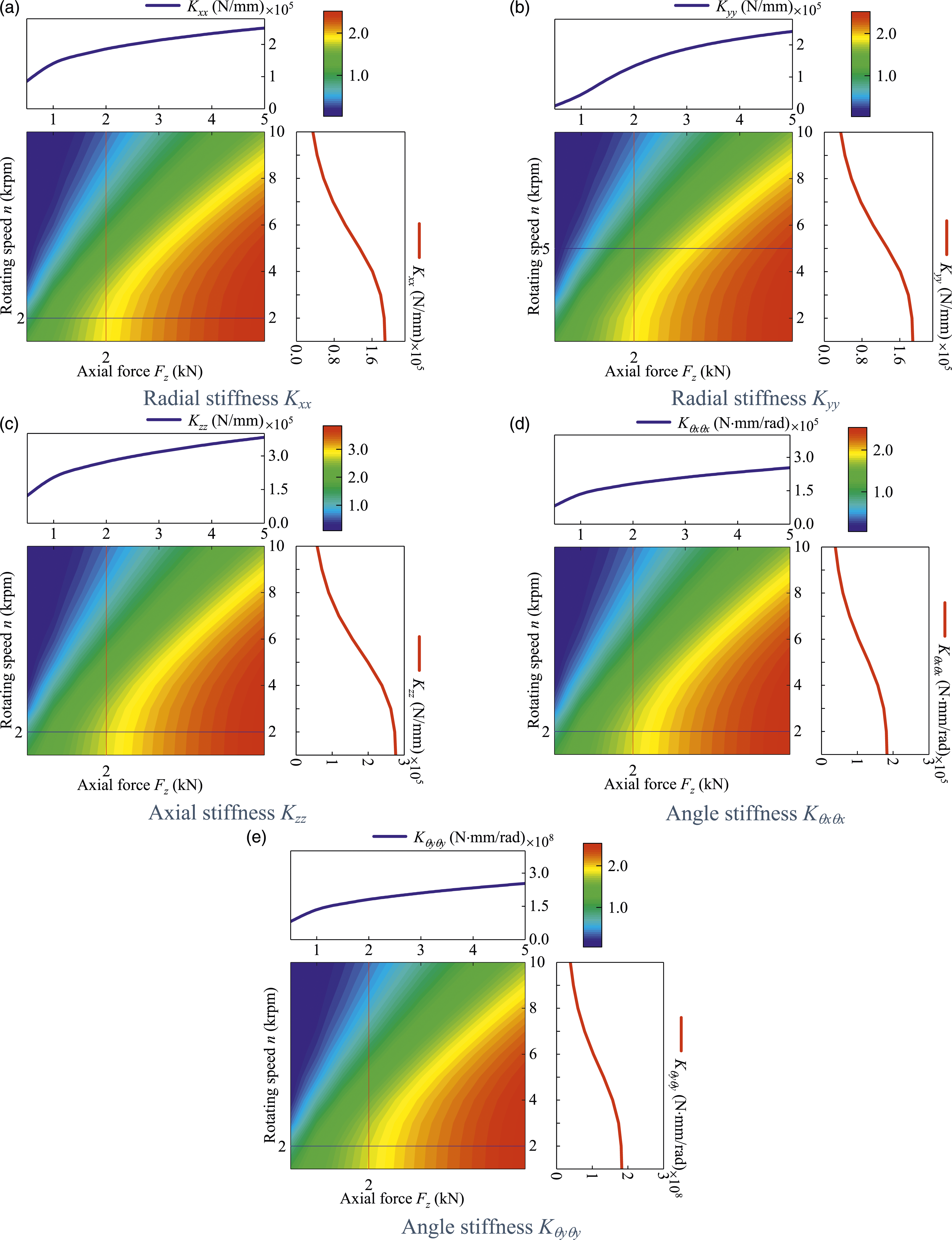
As seen in Figure 22, with the company of radial force F x increased, the radial stiffness K xx and angle stiffness K θyθy increase by means of nonlinear, however, the radial stiffness K yy and angle stiffness K θxθx decrease by means of nonlinear. With the company of radial force F y increased, the radial stiffness K xx and angle stiffness K θyθy decrease by means of nonlinear, however, the radial stiffness K yy and angle stiffness K θxθx increase by means of nonlinear. With the radial force F x and F y increased, the axial stiffness K zz decreases by means of nonlinear.
Finally, the effects of torque M
x
and M
y
on the stiffness characteristics of angular contact ball bearing are discussed. The external load working conditions are selected as: F
x
= F
y
= 0 N, F
z
=5000 N, n=5000 r/min, c
i
=c
o
=0 m. The research results are shown in Figure 23. The influence of torque on stiffness characteristics of angular contact ball bearing. (a) Radial stiffness K
xx
(b) Radial stiffness K
yy
(c) Axial stiffness K
zz
(d) Angle stiffness K
θxθx
(e) Angle stiffness K
θyθy
.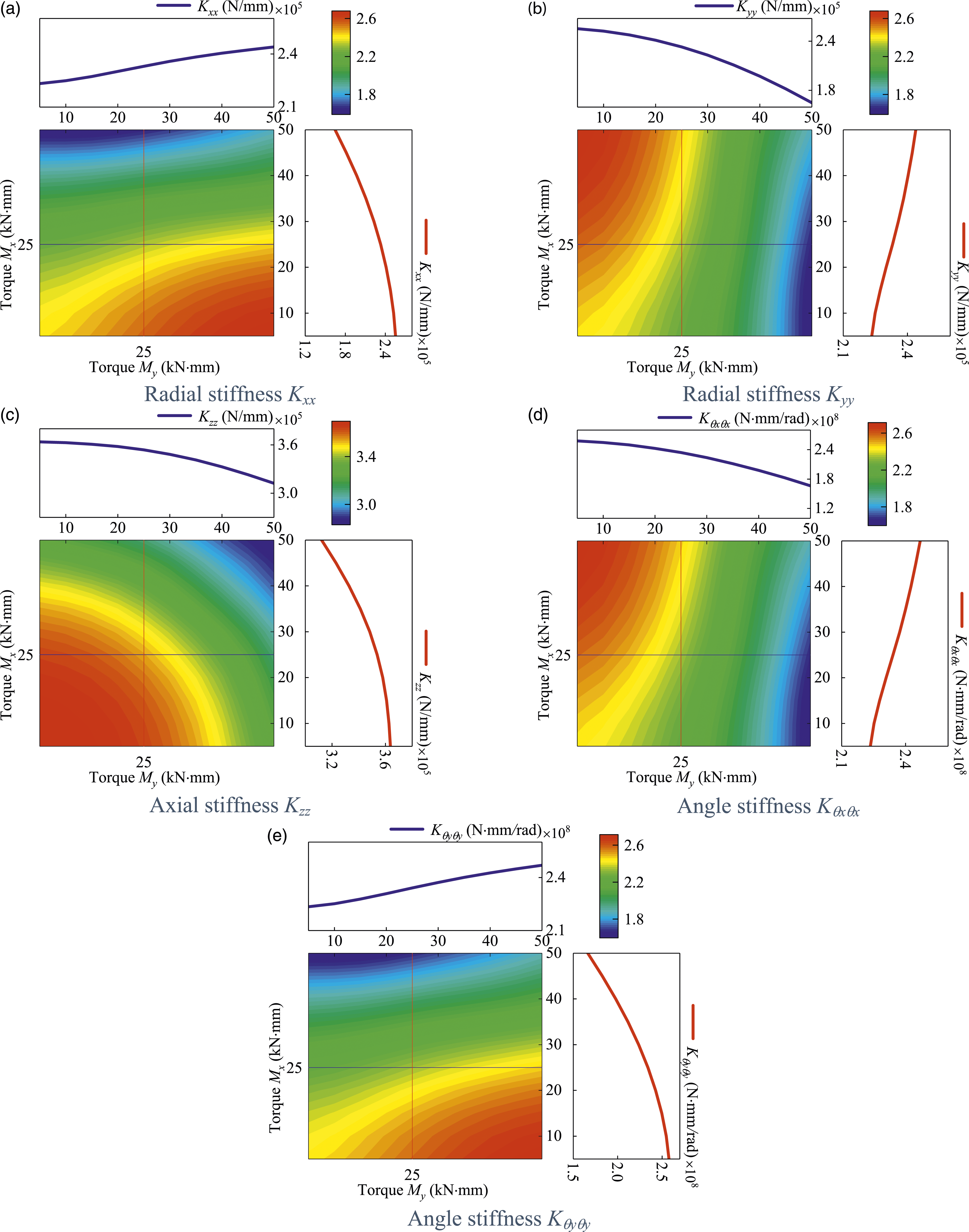
As seen in Figure 23, with the company of torque M x increased, the radial stiffness K xx and angle stiffness K θyθy decrease by means of nonlinear, however, the radial stiffness K yy and angle stiffness K θxθx increase by means of nonlinear. With the company of torque M y increased, the radial stiffness K xx and angle stiffness K θyθy increase by means of nonlinear, however, the radial stiffness K yy and angle stiffness K θxθx decrease by means of nonlinear. With the torque M x and M y increased, the axial stiffness K zz decreases by means of nonlinear.
According to the above variation tendencies of bearing stiffness including radial stiffness, axial stiffness, and angle stiffness, the increase of bearing clearance c i or c o will enhance the bearing stiffness slightly by means of linear; The increase of rotating speed and axial force will reduce and enhance the bearing stiffness significantly by means of nonlinear; The increase of radial force and torque will weaken the axial stiffness, meanwhile, it also reduces and enhances the stiffness of radial and angle in the corresponding directions.
Conclusions
A universal mathematical modelling of angular contact ball bearing with waviness has been established based on inner raceway control and nonlinear Hertz contact theories by employing improved Newton–Raphson iteration method in this paper. The established mathematical modelling considers raceway waviness, ball waviness, bearing clearance, centrifugal force, gyroscopic moment, rotating speed, and external loads comprehensively. The validation of mathematical modelling has been verified by comparing the present results with the existing literature results. The influences of numerous factors on the dynamic characteristics of angular contact ball bearing are investigated systematically. Some representative conclusions of this paper are summarized as follows: (1) With the raceway waviness order increased, the variation tendencies of time-varying stiffness including radial, axial, and angle stiffness are aperiodic, and the number of peak and mean amplitude of time-varying curve increase evidently. The raceway waviness characteristics can be reflected thoroughly in the established mathematical modelling when the raceway waviness order is more than 24. (2) With the ball waviness order increased, the variation tendency of time-varying stiffness including radial, axial, and angle stiffness is aperiodic, the number of peak and mean amplitude of time-varying curve keep constant basically, and the time-varying stiffness keeps constant basically except the time-varying axial stiffness. The ball waviness characteristics can be reflected thoroughly in the established mathematical modelling when the ball waviness order is more than 4. (3) With the waviness amplitude increased, the number and position of peak of time-varying contact angle, contact force, and stiffness remain unchanged, however, the amplitude of time-varying curves increase significantly. The waviness amplitude of raceway and ball should be controlled in a reasonable range in the progress of manufacture. (4) The influences of bearing clearance c
i
and c
o
on the contact angles and contact forces are opposite and linear; The effect of rotating speed on the contact angles and contact forces is opposite and nonlinear; The increase of axial force has no effect on the azimuth distributions of contact angles and forces, has significant effect on the contact angles and forces, the variation tendencies of contact angles are nonlinear and opposite, however, the variation tendencies of contact forces are linear and consistent; The increases of radial force and torque have evidently influence on the azimuth distributions of contact angles and forces, the appearances of radial force and torque result in the contact angles, and forces vary by means of sine, cosine “W” curves. (5) The increase of bearing clearance c
i
or c
o
will enhance the bearing stiffness slightly by means of linear; The increases of rotating speed and axial force will reduce and enhance the bearing stiffness significantly by means of nonlinear; The increase of radial force and torque will weaken the axial stiffness, meanwhile, it also reduces and enhances the stiffness of radial and angle in the corresponding directions.
In order to guarantee the excellent dynamic performance of angular contact ball bearing subjected to complex external load working condition, the waviness amplitude of raceway and ball should be controlled at a reasonable range in the manufacturing process; The bearing clearance c i and c o are as consistent as possible; The relationship between rotating speed and external load should be balanced as much as possible in the process of bearing preload. The limitation of the improved Newton– Raphson iteration method is that the initial iteration values of the model need to be manually adjusted under different external load conditions. The active control of dynamic performance of angular contact ball bearing and the dynamic coupling of rotor-bearing should be investigated in the future.
Footnotes
Acknowledgments
The authors also gratefully acknowledge the supports from Key Laboratory of Vibration and Control of Aero-Propulsion System, Ministry of Education, Northeastern University (rant No. VCAME202006).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors gratefully acknowledge the financial support from the State Key Laboratory of High Performance Complex Manufacturing, Central South University, China (Grant No. ZZYJKT2021-07). The authors gratefully acknowledge the financial support from the National Natural Science Foundation of China (grant No.52075554) and the Natural Science Foundation of the Hunan Province of China (2022JJ20070 and 2021JJ30841). The author also gratefully acknowledge the financial support from the Postgraduate Scientific Research Innovation Project of Hunan Province (Grant No. CX20220263). The author also gratefully acknowledge the support from the Fundamental Research Funds for Central Universities of Central South University (Grant No. 2022ZZTS0177).