
Abstract
The present paper proposes an optimal polynomial control strategy for a quarter-vehicle suspension system based on dynamic programming. The optimal control objective is to decrease the responses of sprung mass acceleration, suspension deformation and road excitation, which are reflected in the performance index. The optimal control force is obtained through the principle of dynamic programming, and the form of the optimal control force mainly depends on the form of the cost function. The optimal nonlinear polynomial control (NPC) force is derived by selecting the cost function in polynomial form. The linear feedback matrix and nonlinear feedback matrix in the NPC force are determined by the Riccati equation and Lyapunov equation, respectively. The root mean square (RMS) responses of the sprung mass acceleration, suspension deformation and road load of driving vehicles under deterministic and random road surfaces are calculated. The numerical results showed that the proposed NPC strategy has a better control effect over the traditional linear quadratic regulator (LQR), especially on the peak reduction of sprung mass acceleration. Finally, the optimal control force is divided into active control force and passive control force. The energy input of the optimal control force can be reduced by only inputting the active control force.
Keywords
Introduction
The suspension system has an important impact on the safety, ride comfort and handling stability of vehicles, 1 especially in some special vehicles, such as oil tank vehicles, signal vehicles and so on. The main purpose of the suspension system is to absorb the vibration and impact transmitted by the road surface. 2 Over the past decades, passive suspension has been widely used in traditional vehicles, such as tuned mass dampers, 3 viscous dampers 4 and dry friction dampers. 5 However, it can only passively dissipate and store external input vibration. Thus, this kind of suspension cannot effectively improve the adaptability and driving performance in the complex external environment.
To solve these shortcomings, the active suspension was proposed by scholars in the 1950s, and a series of studies were subsequently carried out.
6
Active suspension can continuously provide and adjust the control force with the variation of external loads. Thus, it can adapt to the complex environment. The disadvantages of using active suspension are the requirement of additional energy input and complex design of the control force. In recent years, research on active suspension has become more and more popular. The traditional control technologies used in the active suspension are PID control,
7
The widely used control strategies in the actual engineering application are still based on linear system and deterministic excitation. In recent years, some scholars have proposed nonlinear control strategy,20,21 which has a good effect on reducing the peak response of the system and high control efficiency. The theory of dynamic programming is first proposed by Bellman and further developed by Crandall by proposing the viscosity solutions, 22 which has been widely used in optimal control problems. Based on the dynamic programming method, the optimal control force can be derived by minimizing the optimal control conditions and solving the related dynamical programming equation. The advantages of linear feedback control force are simple and easy to realize. However, in practical vibration control problems, the effective control force is to apply the increased control force when the response of the system is large and to apply the small control force when the response of the system is small. The control efficiency will be better when the control force changes in unequal proportion. According to this idea, Agrawal proposed optimal polynomial control for linear stochastic systems based on the stochastic dynamic programming method 23 and then extended this control strategy to nonlinear systems. 24 The results for various systems verified the effectiveness of nonlinear control strategies.
This paper proposes an optimal NPC strategy for the quarter-vehicle suspension system based on the principle of dynamic programming. Firstly, the vibration model of the quarter-vehicle suspension system is established. The responses of the sprung mass acceleration, suspension deformation and road load are taken as the control objectives to give the performance index. The polynomial form of optimal control force is obtained through appropriate selection of the cost function. Then, the responses of the sprung mass acceleration, suspension deformation and the change of road load under harmonic and random road excitation are calculated to show the control effect. For comparison, the results obtained by the traditional LQR are also presented. To reduce the input energy due to the active control force, the obtained optimal control force is decomposed into active and passive control forces. Finally, the numerical results are given to show the advantages of the proposed NPC.
Dynamic model of the quarter-vehicle suspension system
In this paper, the optimal control of a quarter-vehicle suspension system is studied. The quarter-vehicle model is shown in Figure 1. Model of a quarter-vehicle suspension system with active control force.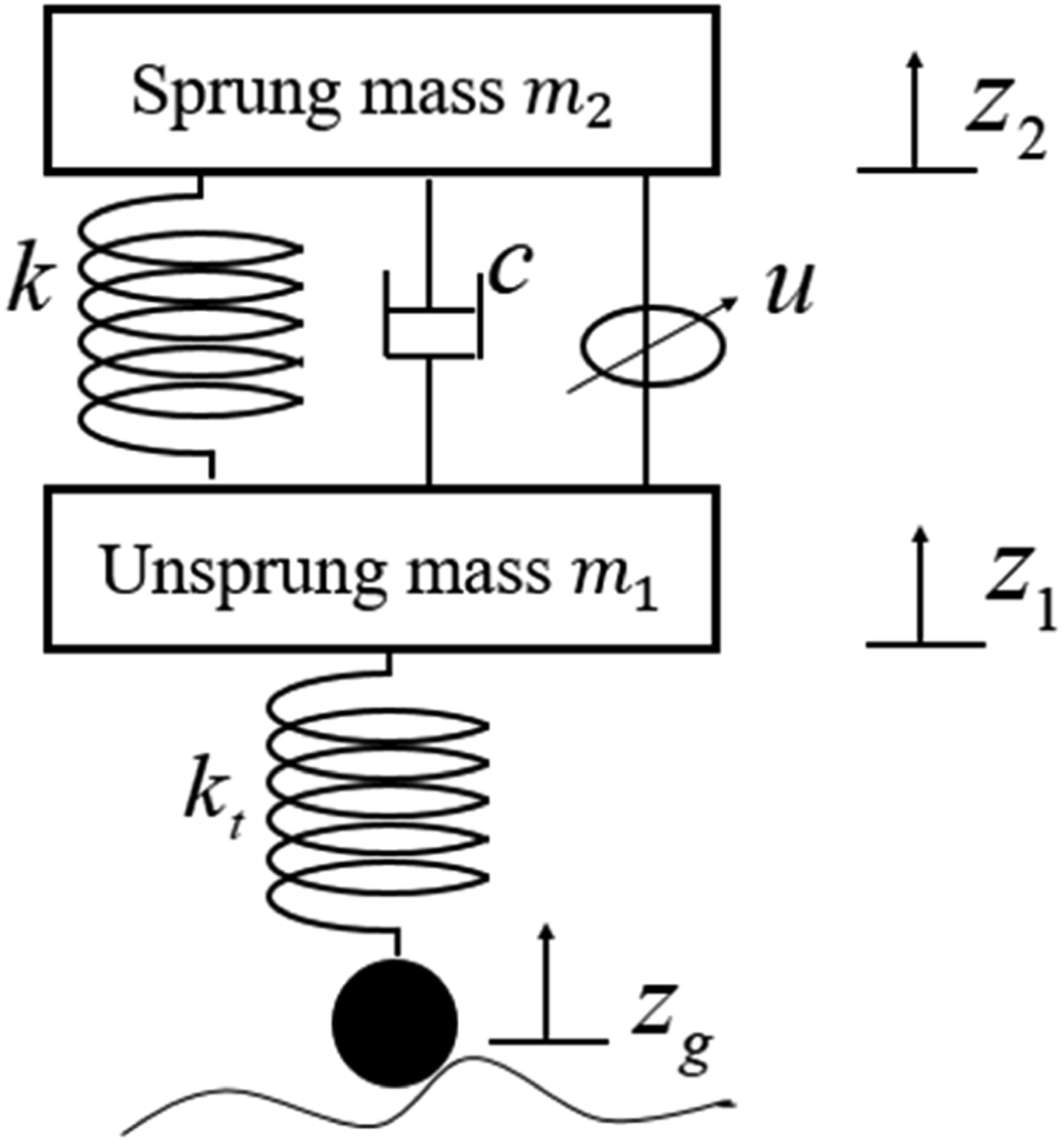
According to Newton's law of motion, the vibration equations of the suspension system are established

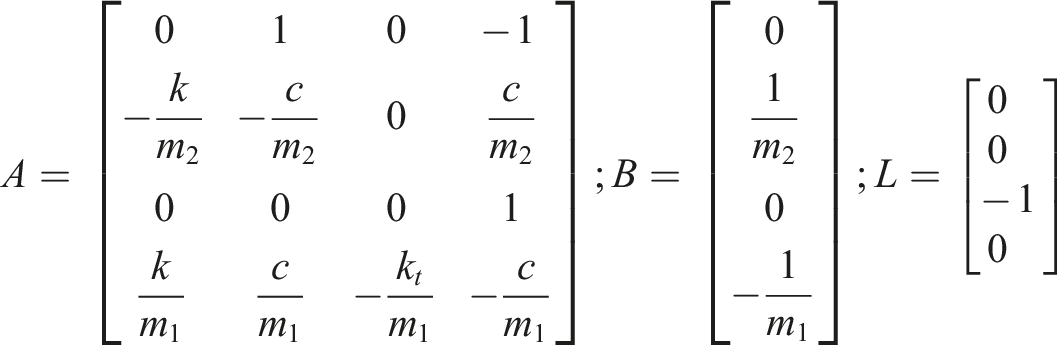
By introducing

Determinization and decomposition of the optimal NPC force
Formulation of the optimal control problem
Most of the previous suspension system control strategies are mainly based on the LQR control strategy, and the derived feedback control force is proportional to the state variables. However, the existing research showed that the nonlinear control strategy could adjust the control force nonlinearly according to the amplitude of the system response. Compared with linear control strategies, it can reduce the peak response of the system and has high control efficiency. In this section, we will establish an optimal polynomial control strategy based on the principle of dynamic programming.
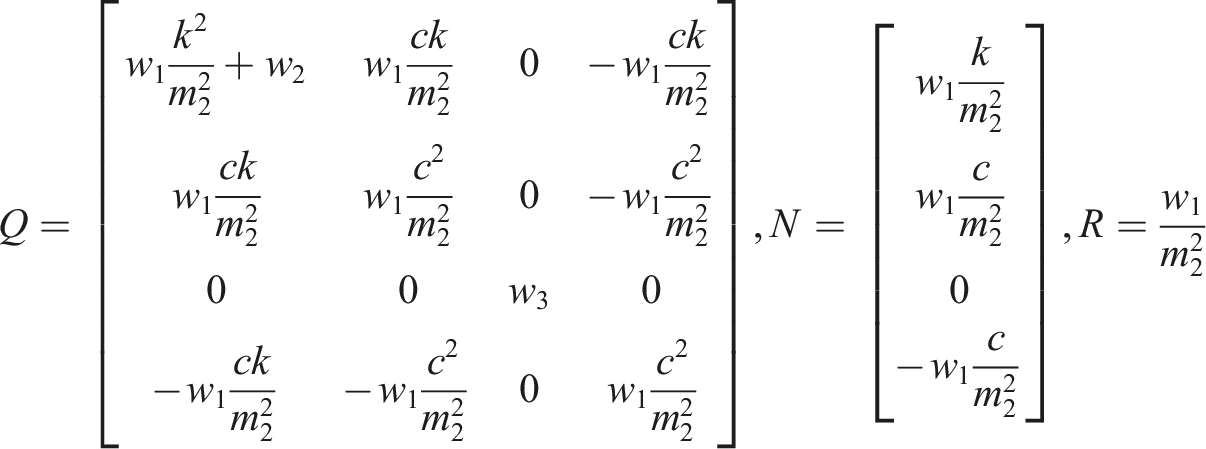
The performance index



The optimal control force can be derived by minimizing
Traditional LQR
Traditionally, the control objectives to be considered in vehicle suspension are sprung acceleration, suspension deformation and road excitation. Therefore, these quantities will eventually be used as control targets


Substituting equation (6) into equation (4) and according to the minimization condition, the linear optimal control force is derived with the following form


Considering the steady case, matrix

Optimal nonlinear polynomial control
The optimal control force depends mainly on the expressions of


Assuming that


According to the minimization conditions, the control force can be obtained in the following form

By substituting the control force in equation (14) and value function in equation (12) into the dynamic programming equation, the following equation is derived

According to the order of


According to the expression of the control force in equation (14), the nonlinear expression of the control force


To eliminate the functions of


Therefore, if the matrix
Considering the steady state of the system, the equation for


Decomposition of optimal control force
In the realization of the control process, additional active control force means more energy consumption, and the power consumption of control force is strictly limited in many vehicle systems. To reduce the consumption of the active control force, the control force is decomposed into active control force and passive control force with the following form



However, it is seen from equation (23) that the expressions of the optimal control force happen to be in the polynomial form of
Numerical results
Values of parameters in a quarter car system.

In the LQR control strategy, the weighting coefficients are selected as
Harmonic excitation
First, we consider the case that the vehicle is driven on the road with a sinusoidal surface; In this case, the excitation will be harmonic. The excitation force is
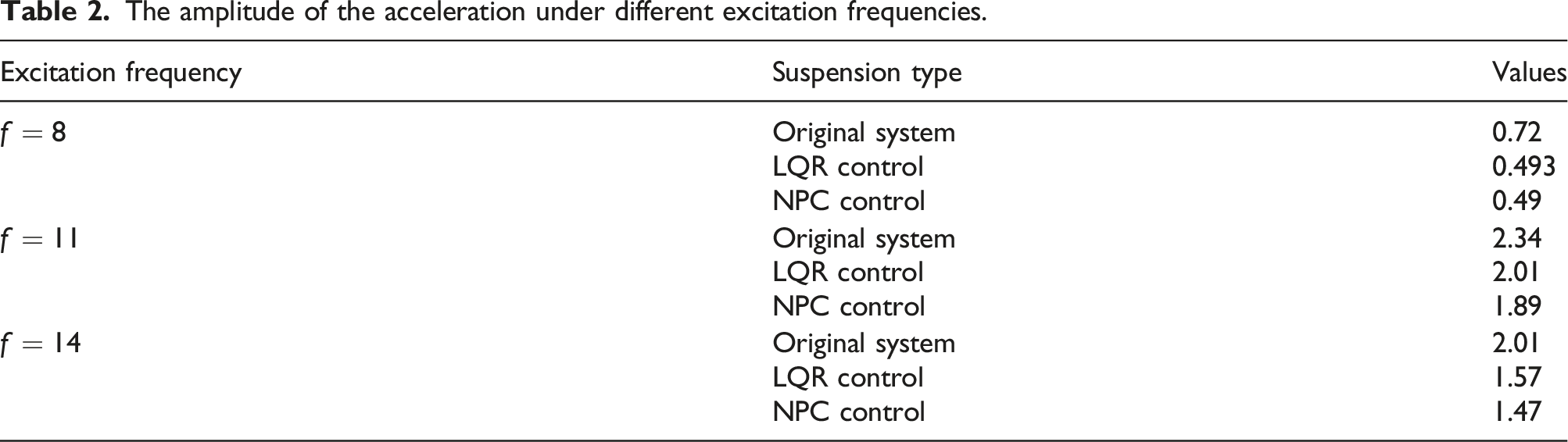
The amplitude of the acceleration under different excitation frequencies.
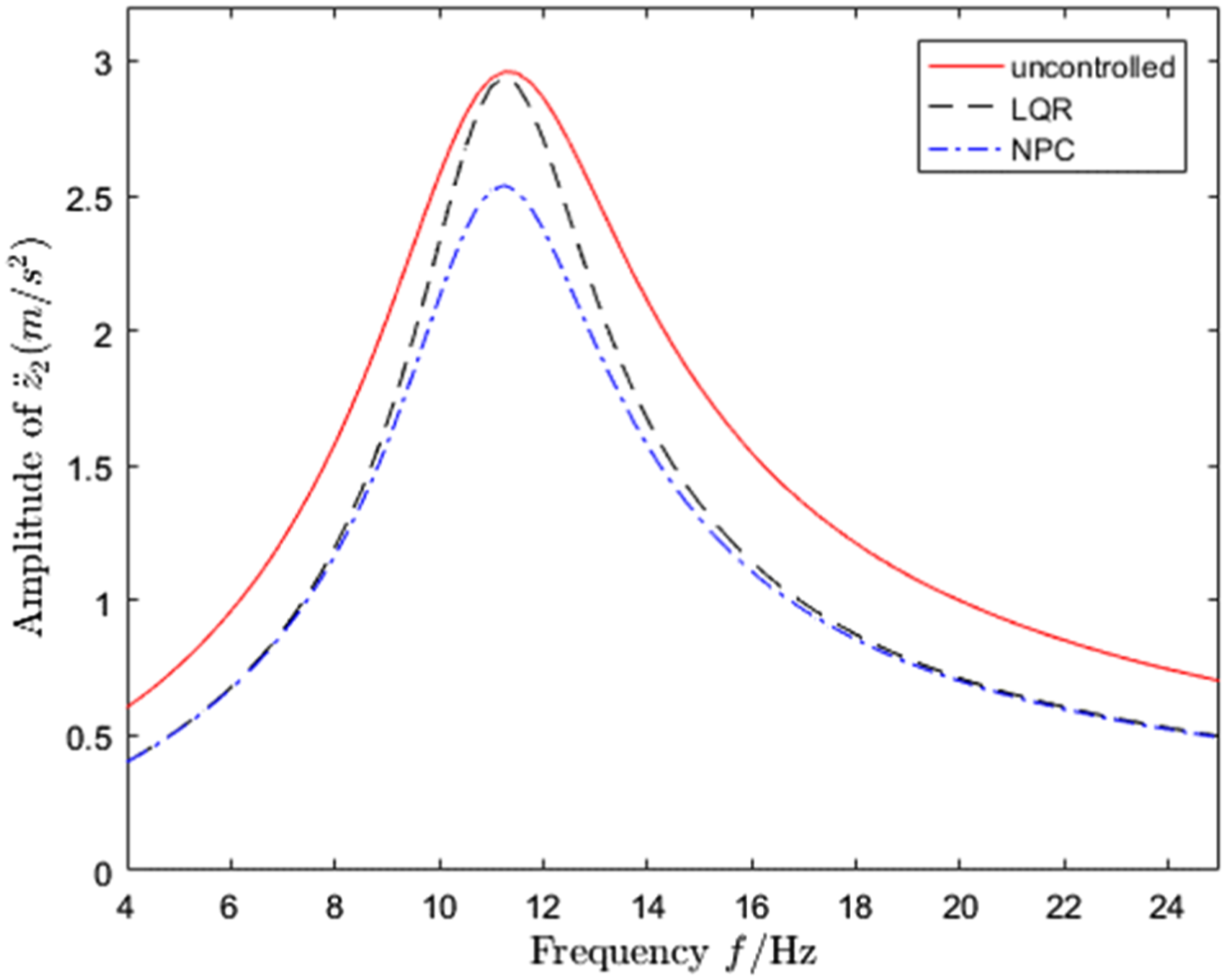
The frequency-amplitude curve under different values of frequencies.
To give a more intuitive exhibition, the typical time histories of the sprung mass acceleration are shown in Figure 3 with excitation frequency Comparison of sprung mass acceleration under different control strategies with excitation frequency 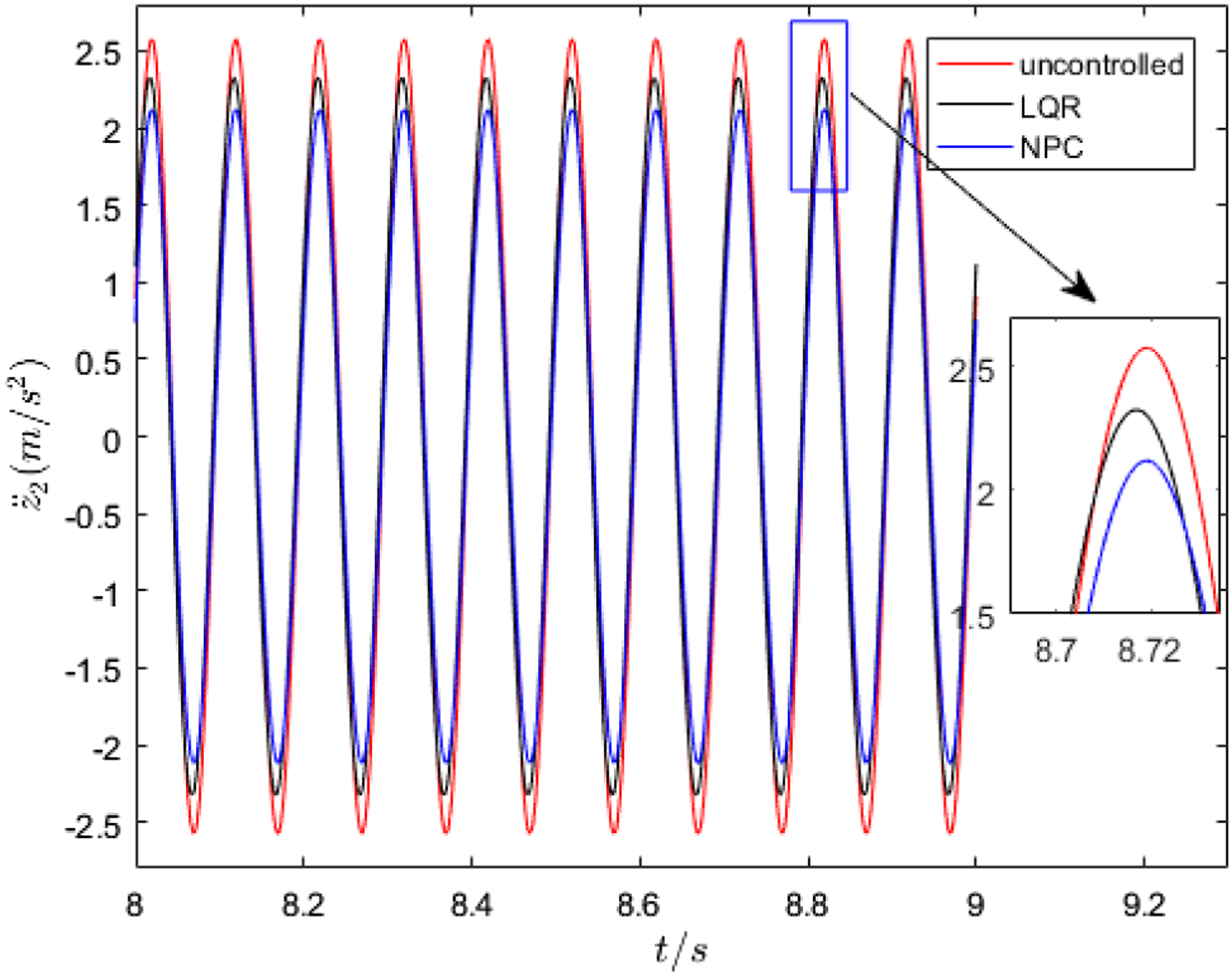
Bumped road surface excitation
Then, we consider the case that the vehicle is driven over a bumped road surface with
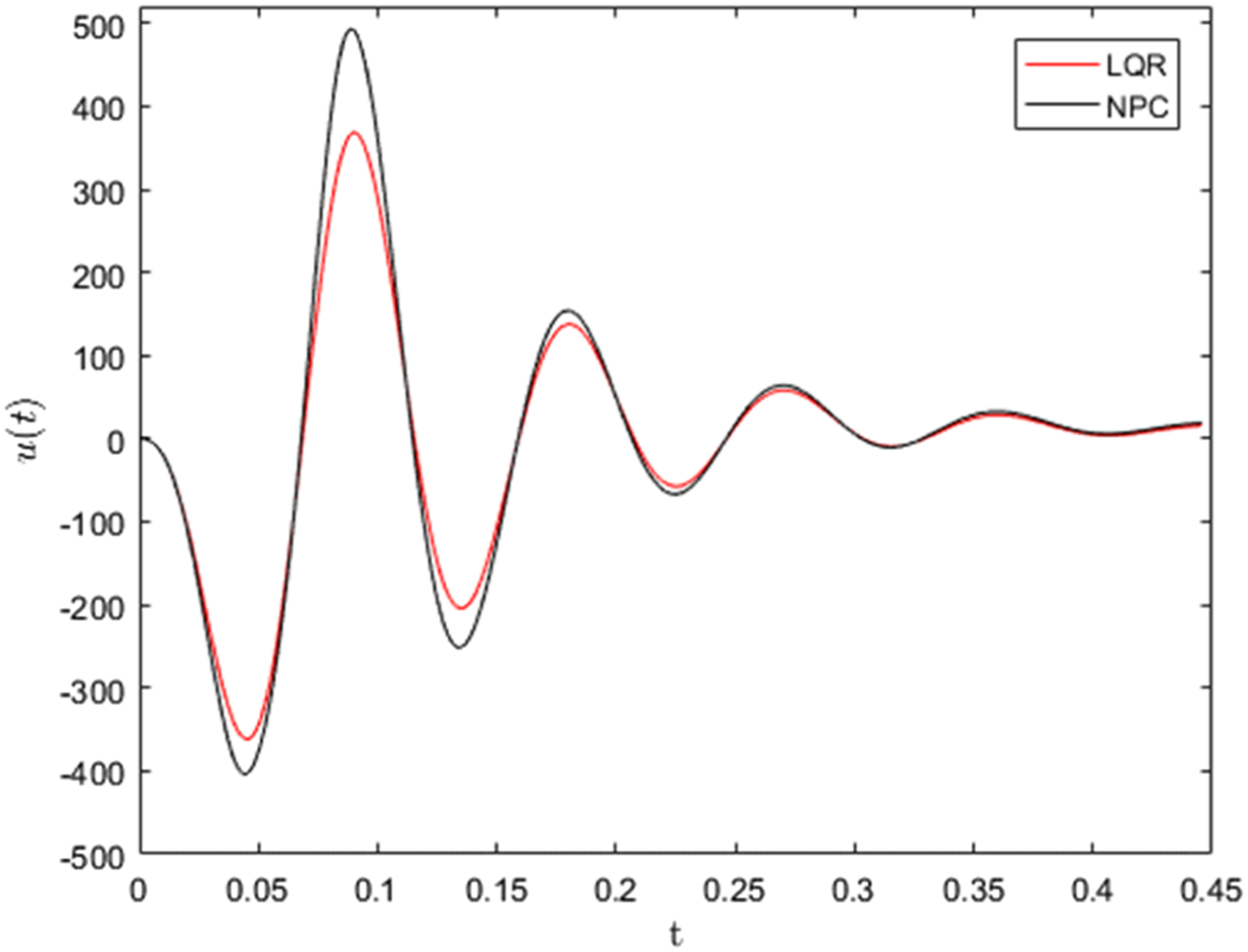
In calculation, the parameters are selected with Comparison of sprung mass acceleration under different control strategies with bumped road surface excitation. Time histories of the optimal control force.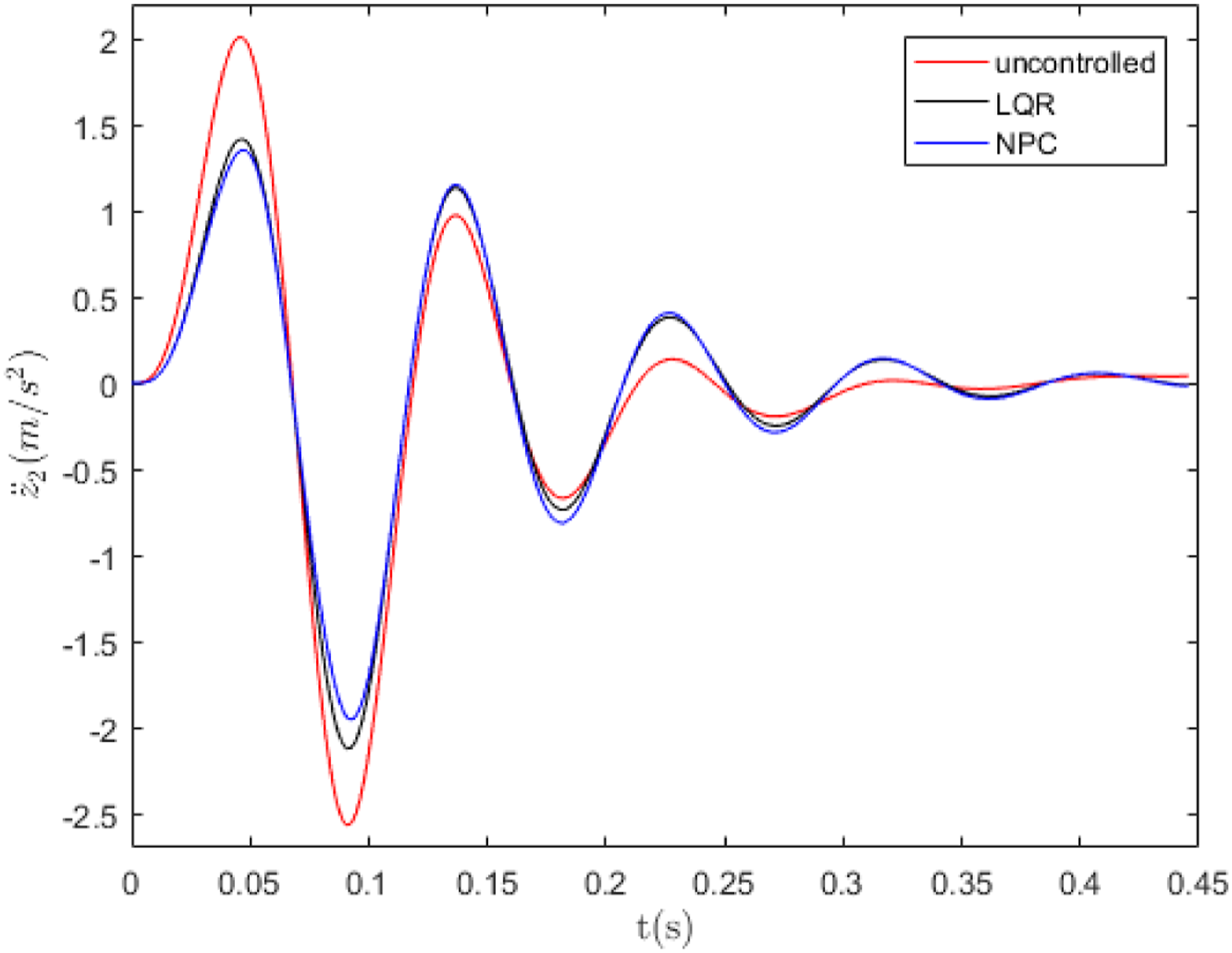
Random disturbance
The following power spectrum density of road surface is often used
In the actual calculation, the following model is often used for the pavement excitation model
Firstly, the road input excitation is simulated by equation (30), and the road unevenness is related to the vehicle speed. Generally, the greater the speed, the greater the excitation. As road excitation is a random process, the system’s responses are also random processes. Therefore, we can use the root mean square (RMS) response of the system to evaluate the control strategy
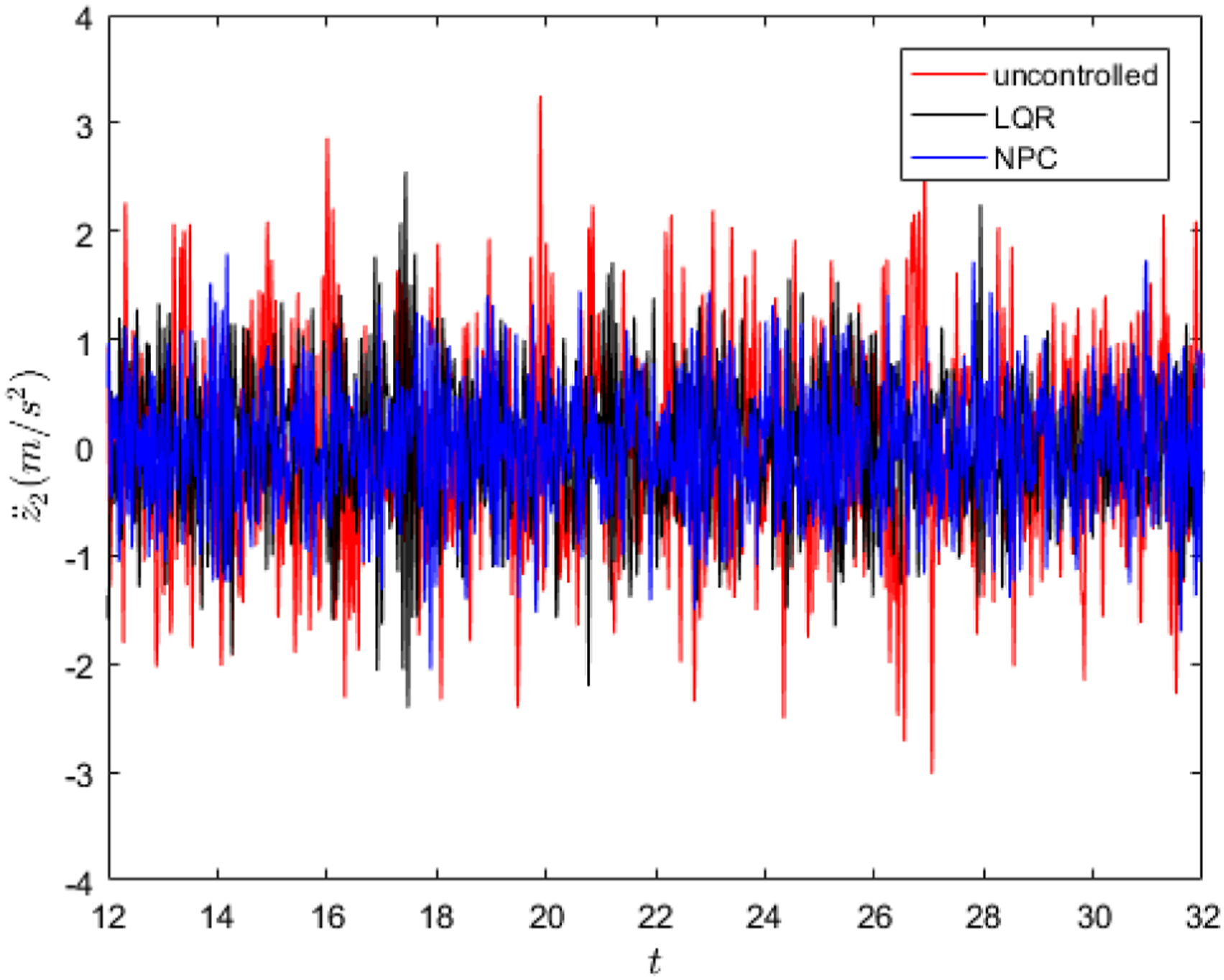
The RMS of the sprung mass acceleration under different driving speeds is shown in Figure 6. From Figure 6, it is seen that the RMS of the sprung mass acceleration decreased a lot by both the LQR and the proposed NPC strategies. In all the speed ranges investigated, the reduction rate of the proposed optimal control strategy is higher than that of the traditional LQR. Combined with the time histories of sprung mass acceleration shown in Figure 7, it is seen that the response of the system with nonlinear control force has smaller peak response, which also shows that the proposed NPC control strategy has a better peak reduction effect. The RMS of the sprung mass acceleration under different driving speeds with B-class road ( Time histories of sprung mass acceleration under driving speed 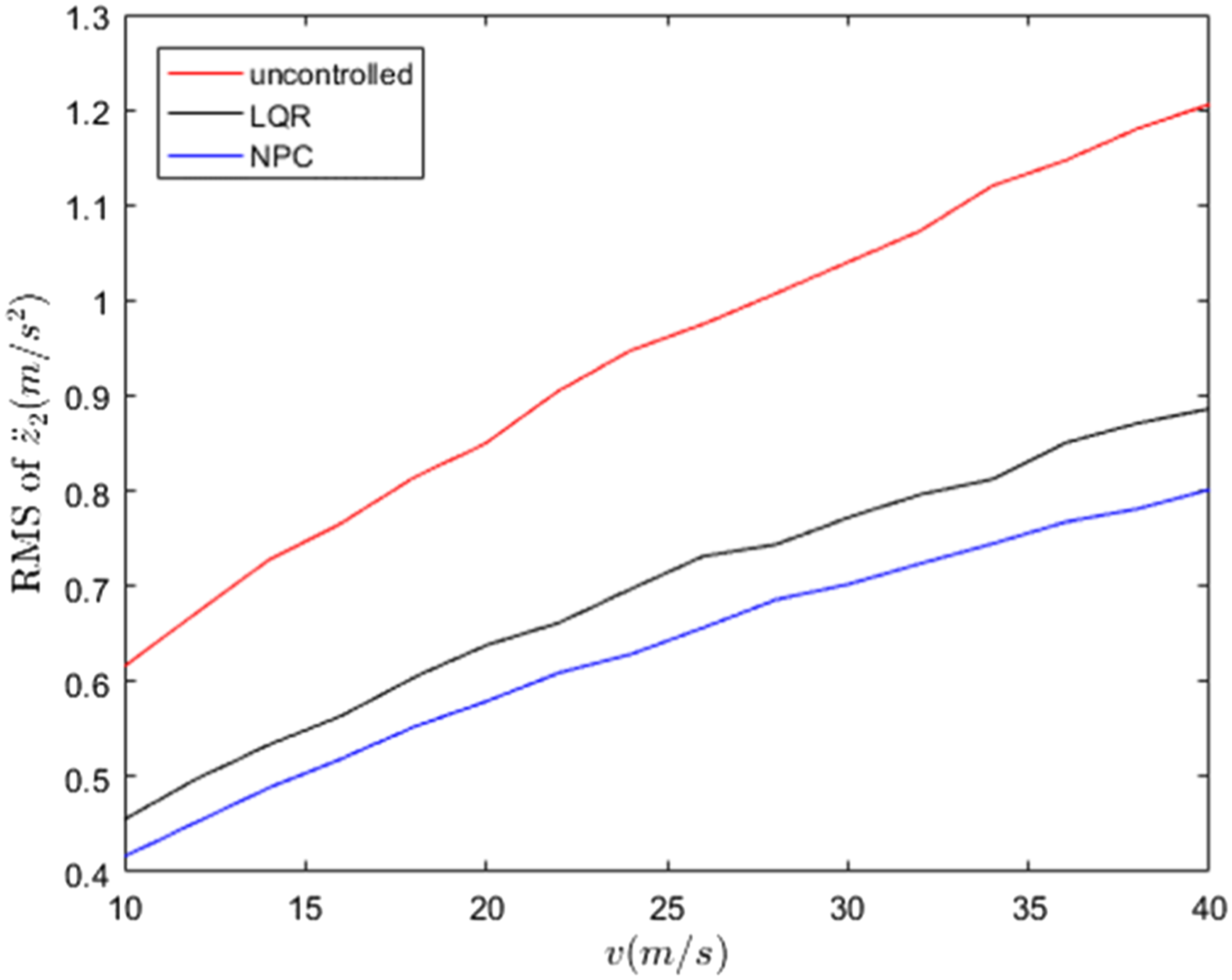
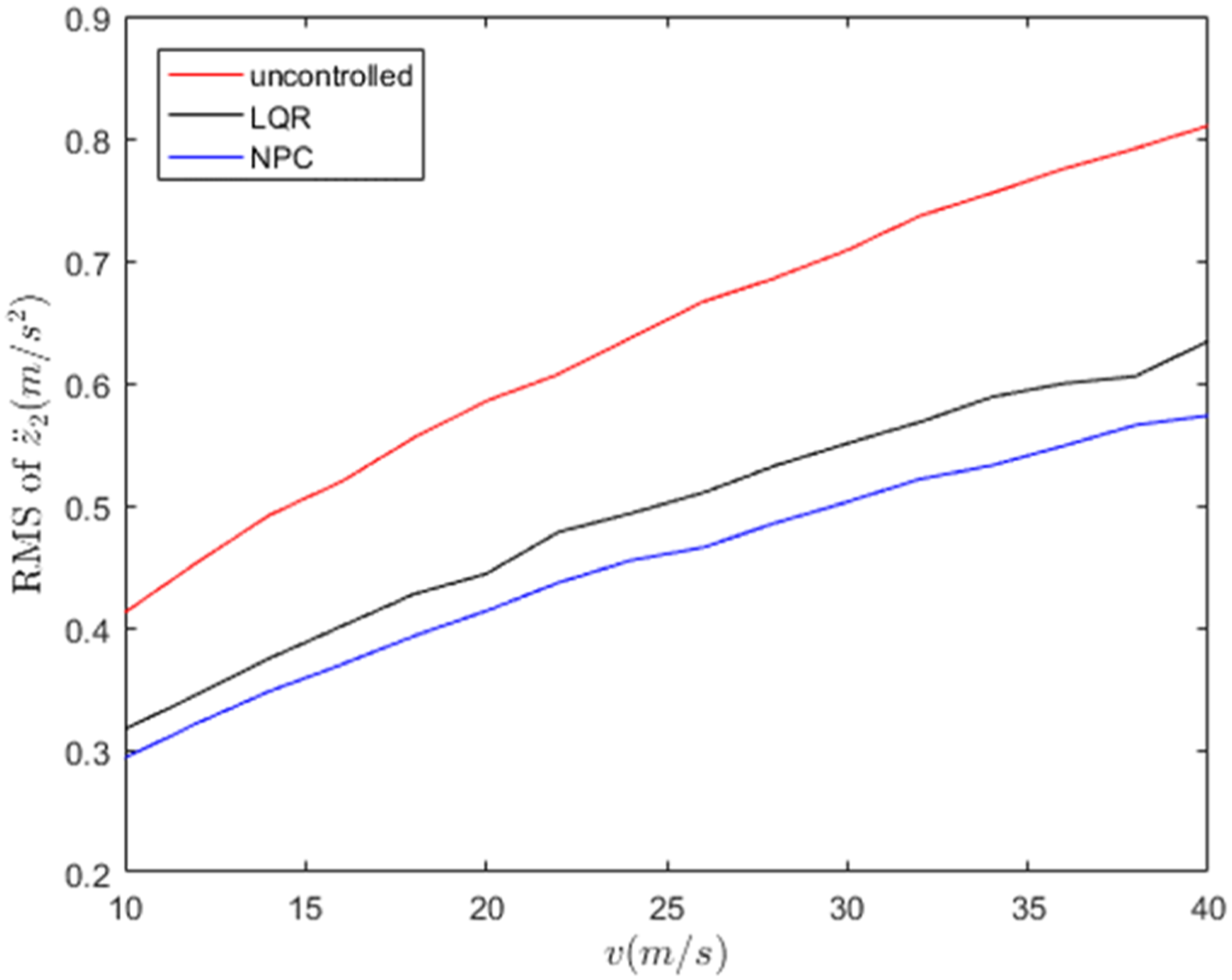
In order to provide a more intuitive view of the effects of the linear and nonlinear control forces, the time histories of the total control force Time histories of the control force The RMS of the sprung mass acceleration under different driving speeds with A-class road (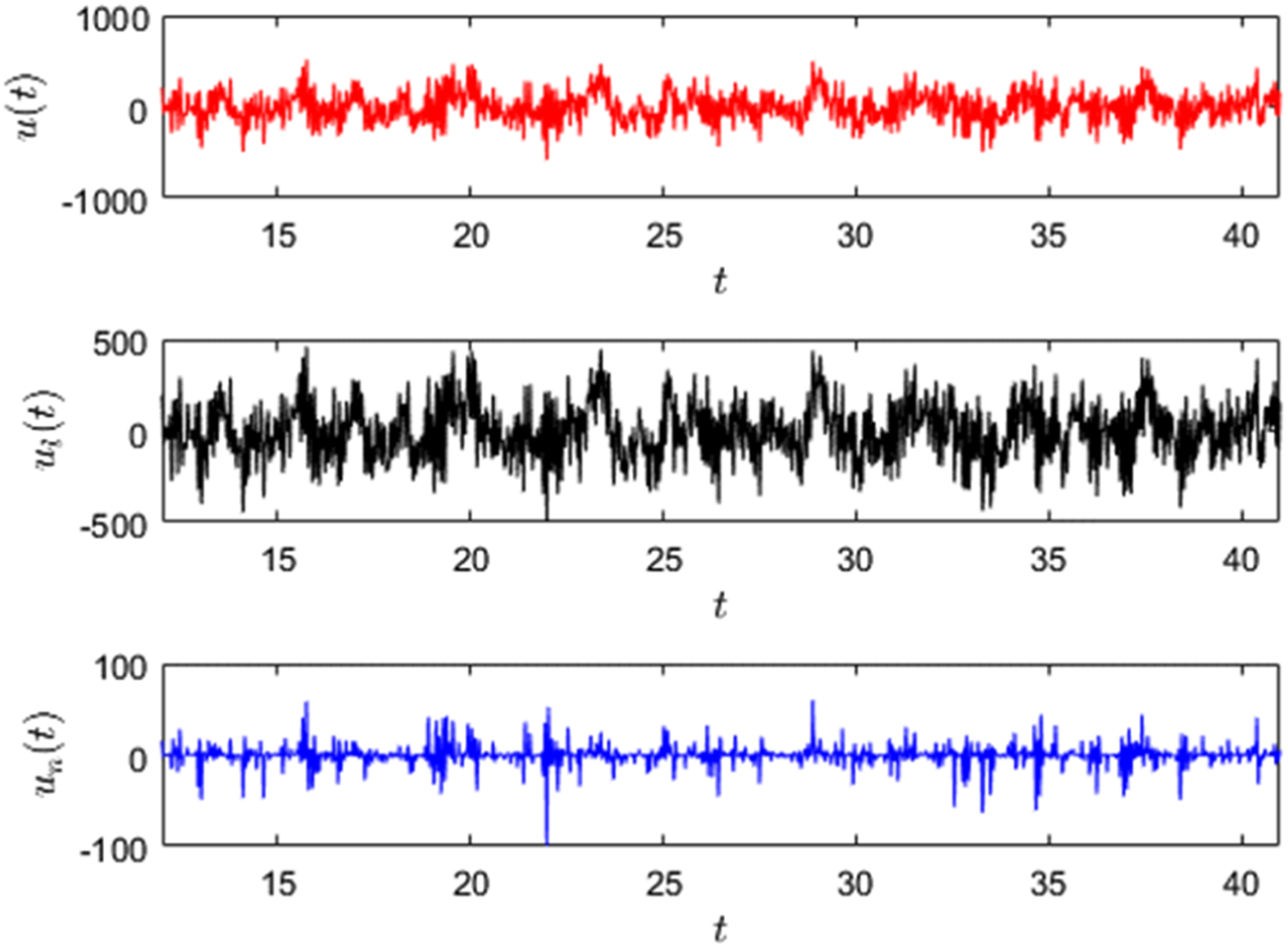
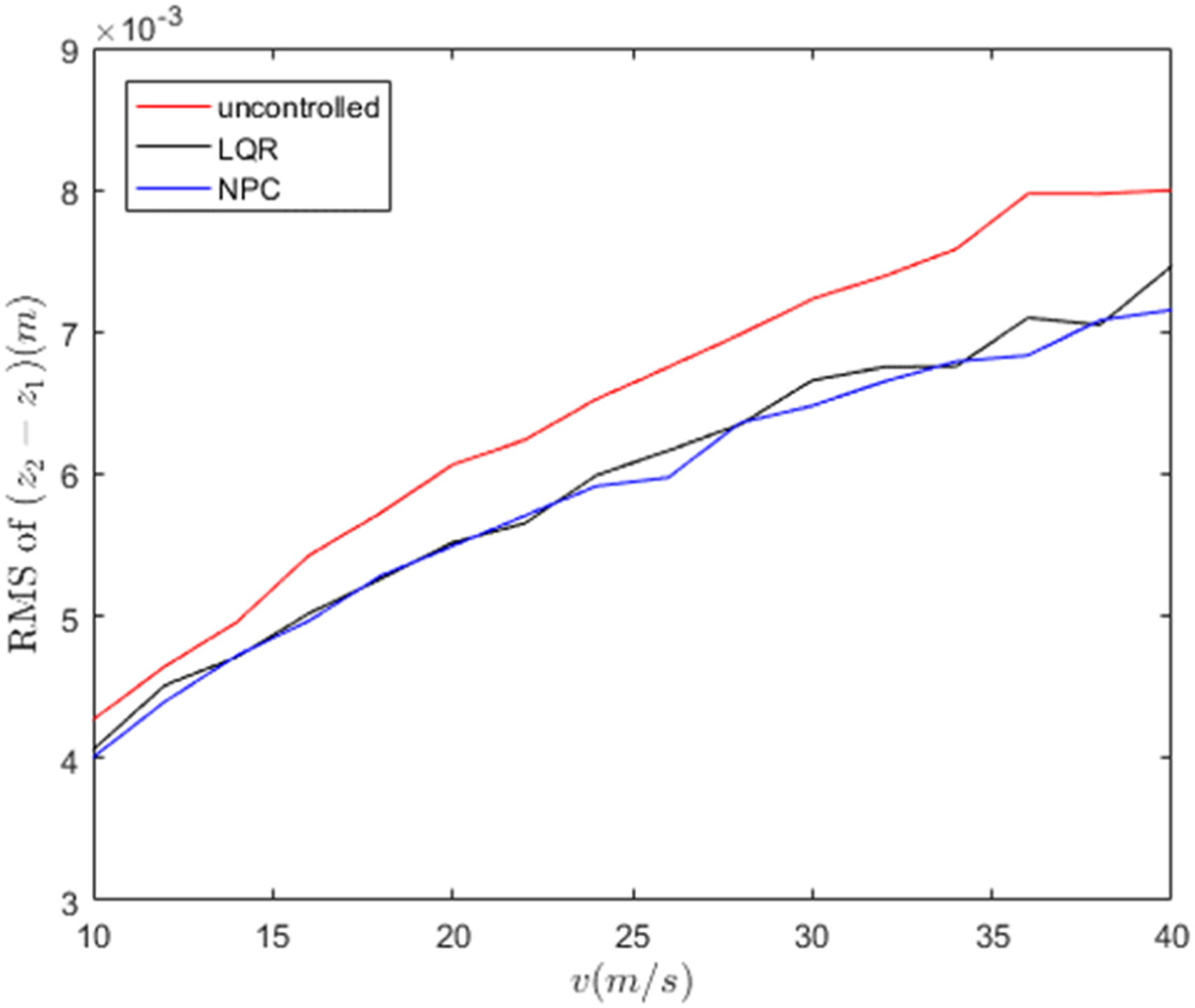
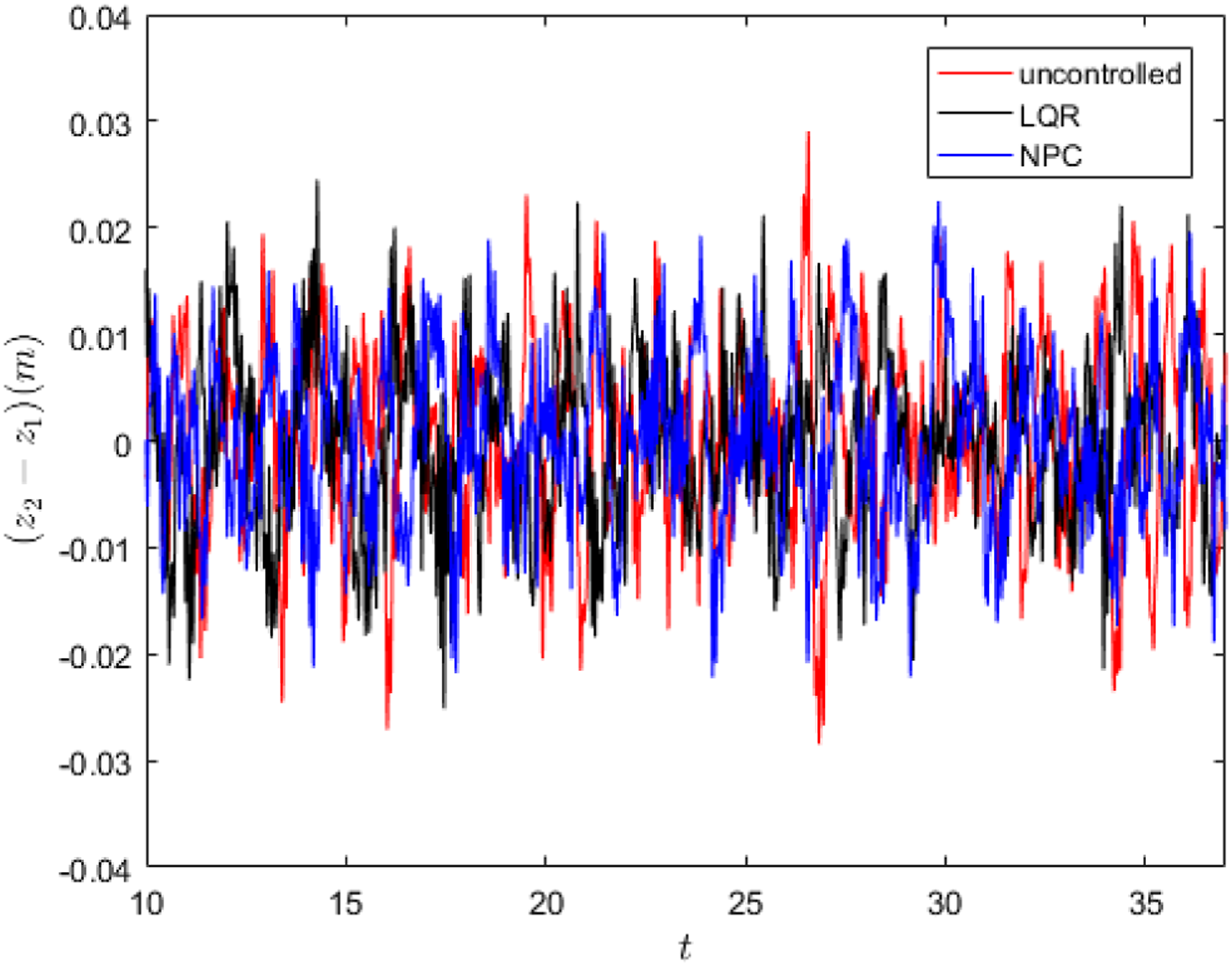
In Figures 10 and 11, the suspension deformations under different driving speeds are exhibited under different road conditions. Compared with the uncontrolled system, it is seen that the deformations of suspension in LQR and NPC strategies have decreased a lot. The suspension deformation of NPC strategy is almost the same as that of LQR for different driving speeds. Figure 12 shows the time histories of the suspension deformation under B-class road with driving speed The RMS of the suspension deformation under different driving speeds with B-class road ( The RMS of the suspension deformation under different driving speeds with A-class road ( Time histories of suspension deformation under driving speed 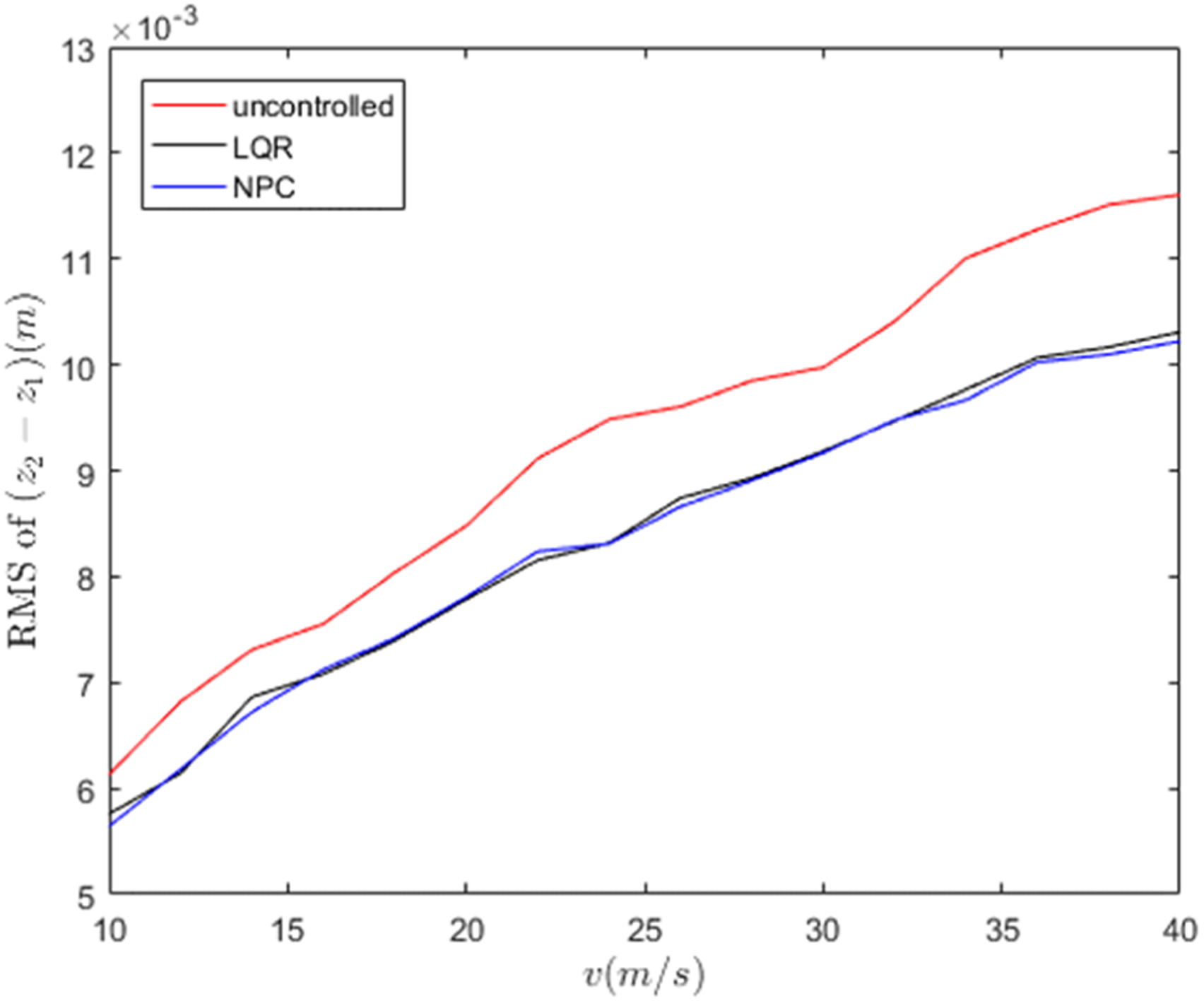
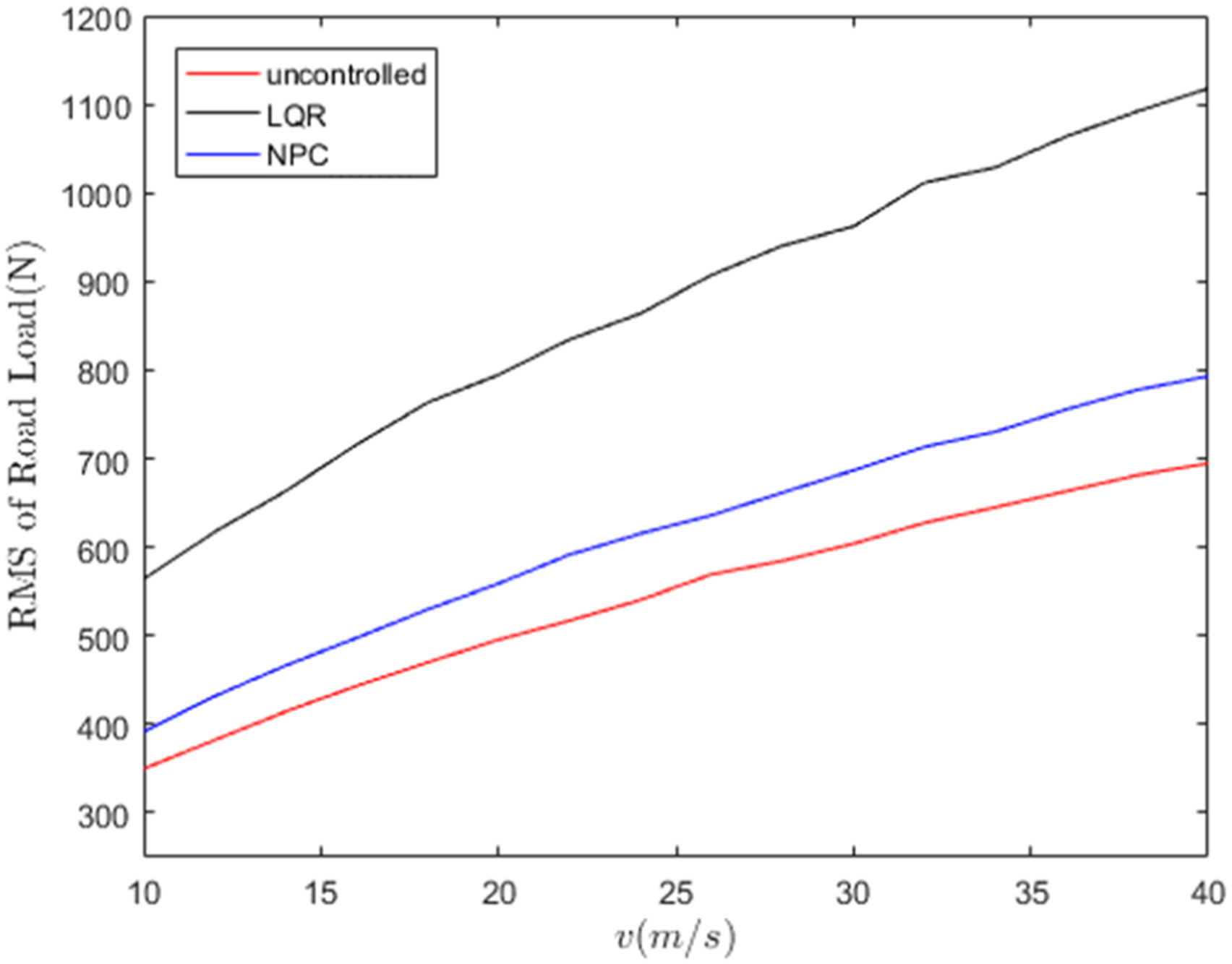
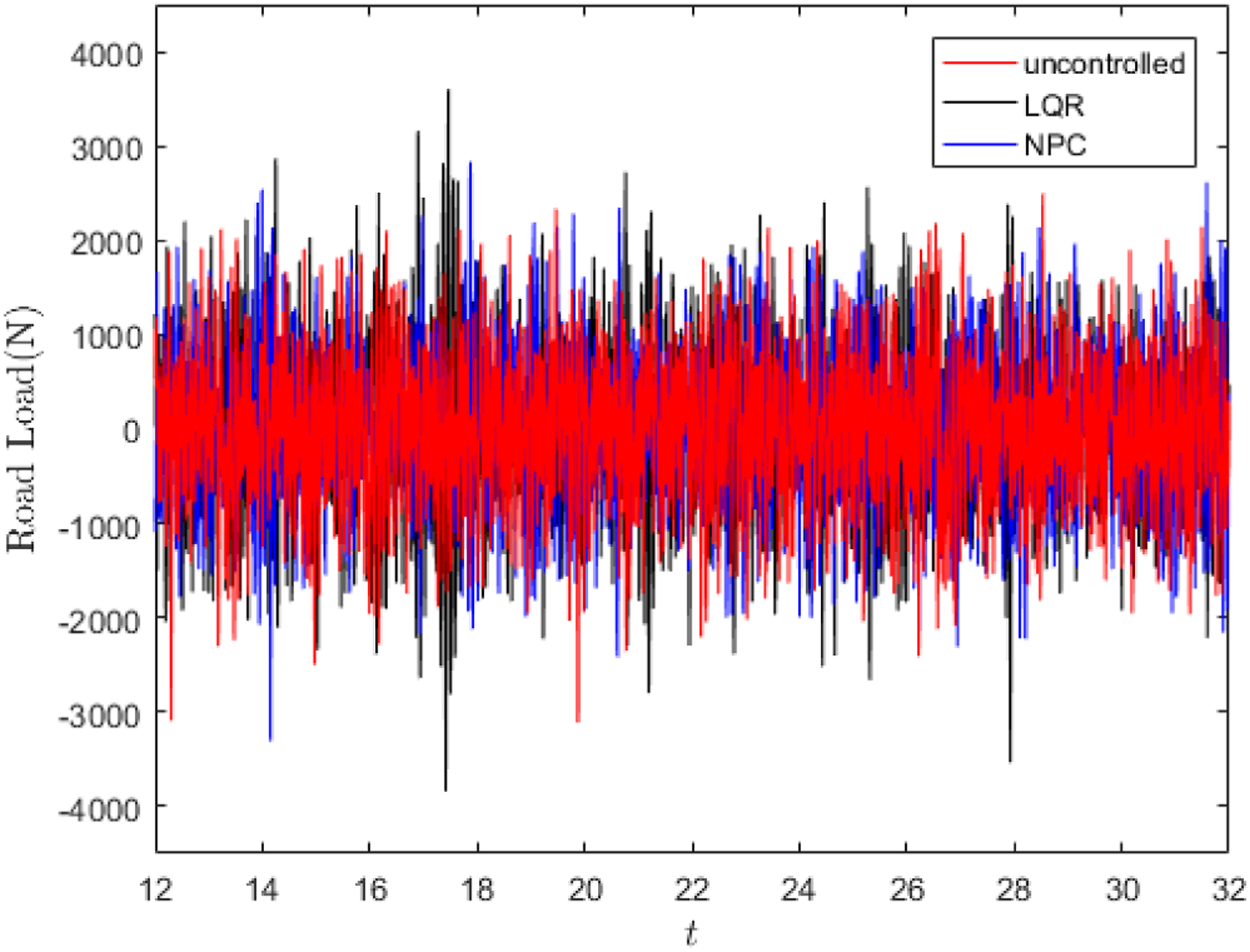
As it is shown in Figures 13 and 14, the road load of the system under the proposed NPC and the traditional LQR control strategy increases compared with that of the uncontrolled system. This is because the control force can only be applied between the sprung mass and the unsprung mass in the control of the vehicle system. However, the acceleration of the sprung mass, road excitation and suspension deformation of the control target affect each other. Under the given control requirements, it is difficult to reduce all the indexes simultaneously. Generally, the usual treatment is to decrease the acceleration of the sprung mass and ensure that road excitation and suspension deformation are within a reasonable range. Figure 15 shows the time histories of the road load driving speed The RMS of the road load under different driving speeds with B-class road ( The RMS of the road load under different driving speeds with A-class road ( Time histories of the road load under driving speed 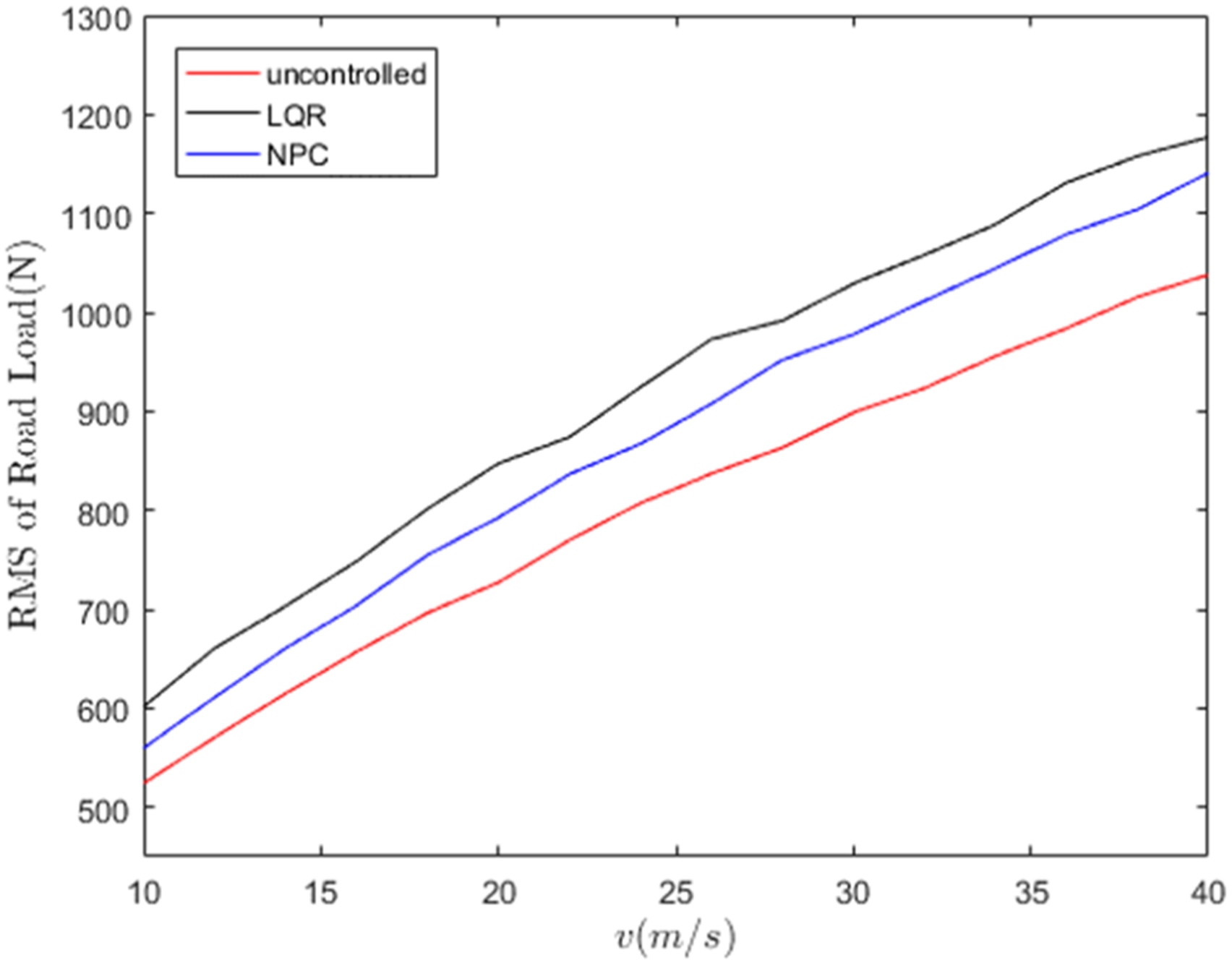
According to the discussion above, the proposed NPC control strategy has a better performance in the control target of the sprung mass acceleration and the road load and has almost the same performance in the control of suspension deformation. In most cases, the sprung mass acceleration affects the ride comfort and the safety of the loaded goods. Therefore, it is the primary control target. From this point of view, the proposed nonlinear control strategy has advantages.
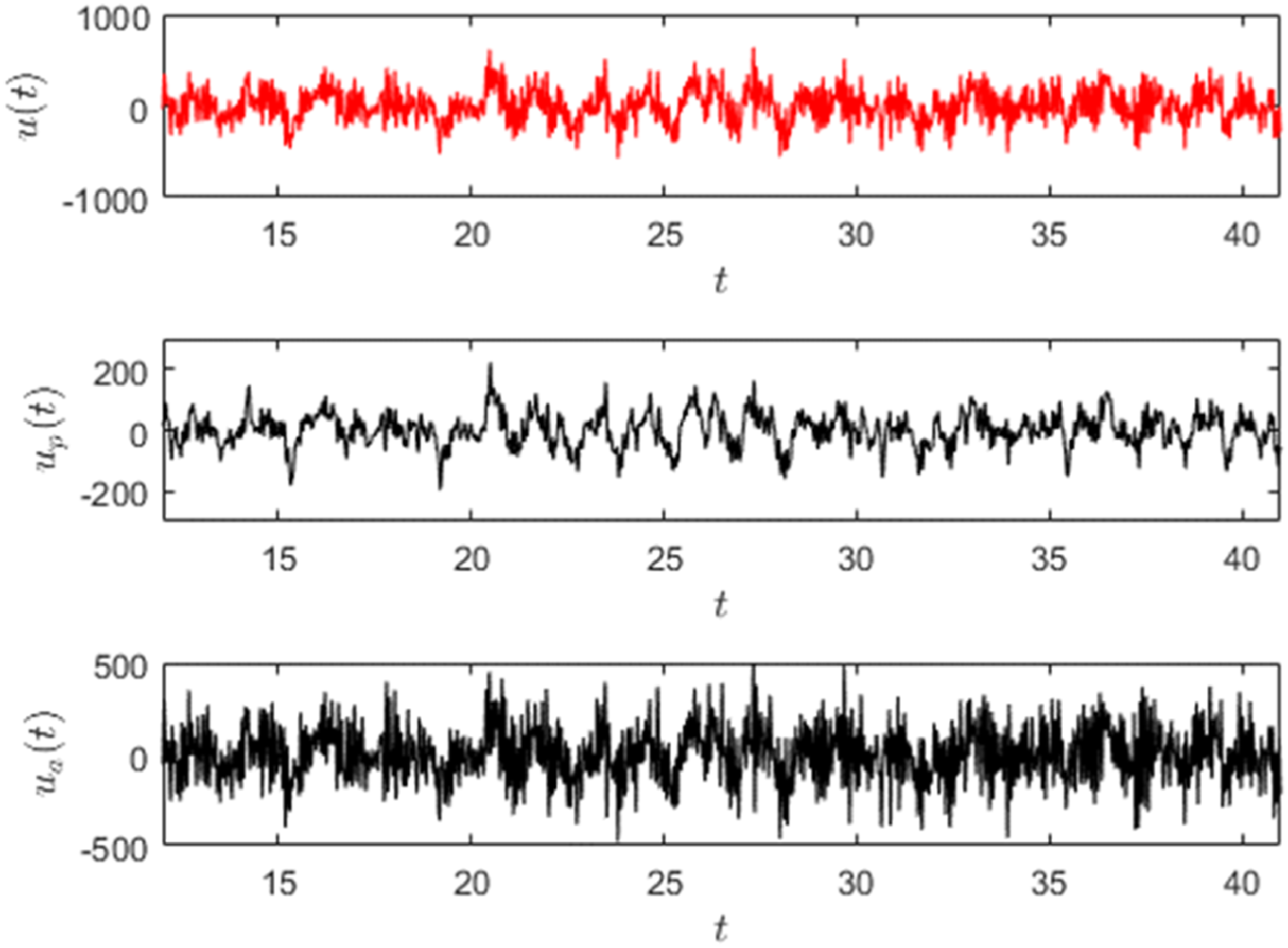
Figure 16 shows the mean square values of the optimal control force and passive control force in the optimal control force at different driving speeds. The time histories of the total control force The RMS of the optimal control force and the passive control force under different driving speeds. Time histories of the control force 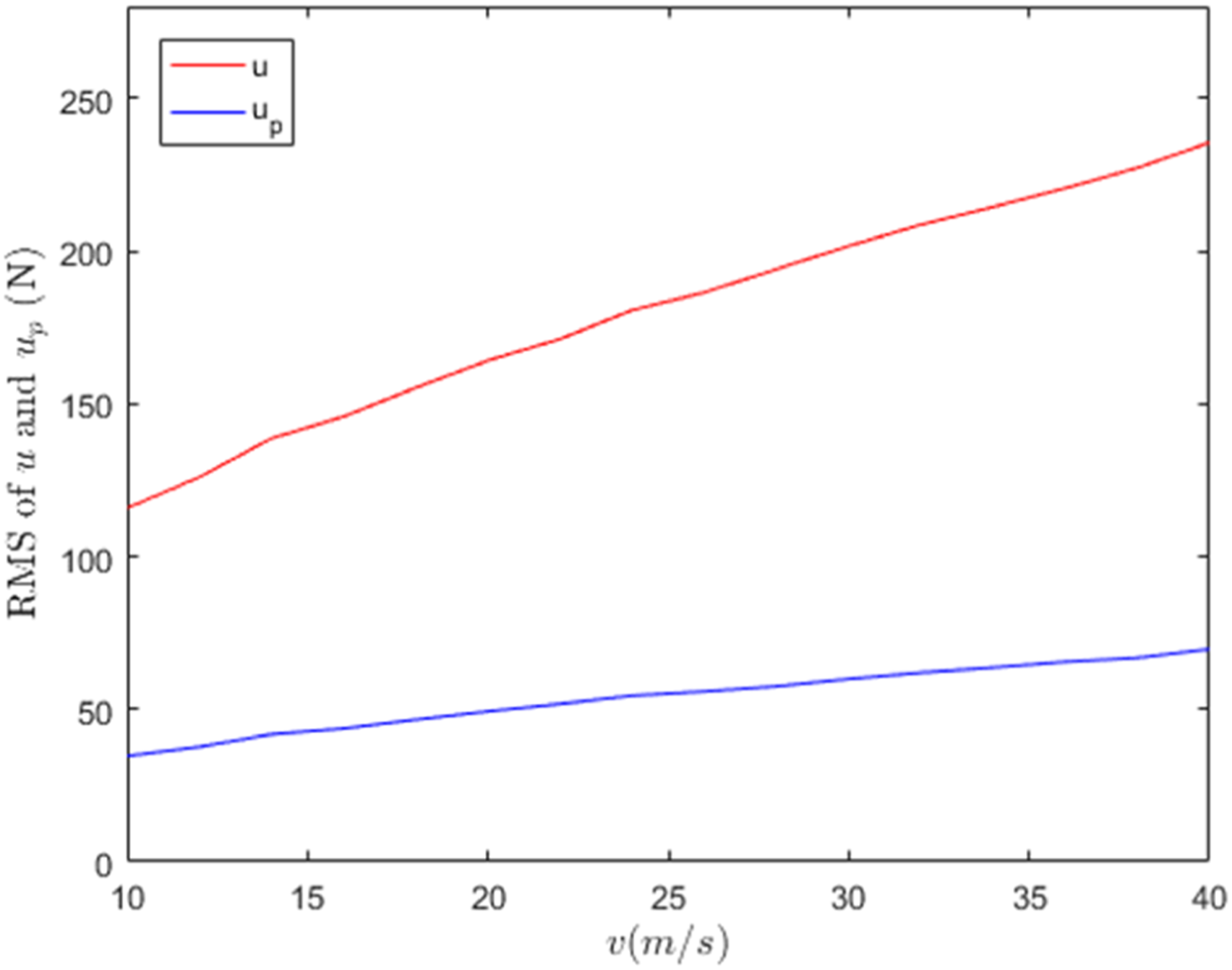
Conclusion
In this paper, the vibration control problem of the quarter-vehicle system is studied based on the dynamic programming method. By reasonably selecting the index function, an optimal NPC strategy is developed. The derived optimal control force will be adjusted nonlinearly according to the vibration responses of the vehicle system, which can provide cross large control force when the vehicle vibration is large. Compared with the LQR control strategy, the proposed control strategy has good performance in the main control indexes and effectively reduces the peak response of the system. Finally, the optimal control force is decomposed into active and passive control force, and only the active control force needs additional energy input, which can effectively reduce the energy consumption in actual control execution. The developed optimal NPC strategy in this paper has good application in the design of active vehicle suspensions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work in the present paper is finished under financial support from the National Nature Science Foundation of China under grant No. 11872307, No. 11972293 and the National College Student Innovation and Entrepreneurship Training Program under grant No. 202110699167.