
Abstract
By modifying the mass and stiffness parameters of a structure, a subset of its natural frequencies can be assigned. However, such an assignment is usually accompanied with changes of the remaining frequencies, known as ‘spillover’. Eigenvalue or frequency spillover often needs to be avoided in engineering.
In this paper, a new and general method is proposed for assigning a subset of the natural frequencies of a structure with a low level of spillover through structural modifications. The method combines a multi-population genetic algorithm and a radial basis function neural network and is implemented in a MATLAB-PYTHON-ABAQUS data interaction system. It is suitable for theoretical models (for example, finite element models) of general structures.
By means of three numerical examples, the ability of the method to assign subsets of frequencies to discrete and discretised continuous structures while maintaining low spillover is demonstrated.
Keywords
Introduction
The natural frequencies (or eigenvalues) of a structure determine its dynamic characteristics. When a natural frequency of a structure is close to the frequency of excitation, resonance occurs, often resulting in noise, or malfunction or damage or even destruction. One effective way to avoid resonance is to redistribute the natural frequencies of a structure. A structure’s natural frequencies can be assigned different values using active control, 1 passive control, 2 semi-active control or a combination of active and passive control. 3 Active control uses feedback from sensors to produce the right control actions from actuators to change the ‘natural’ frequencies and/or modes of a structure. Passive control modifies the structural characteristics of a structure (such as its mass and stiffness matrices, and occasionally the damping matrix) to obtain desired frequencies and/or modes. There are two types of structural modifications: forward modification and inverse modification. A forward structural modification usually makes a series of modifications to the model, in a sort of trail-and-error manner or based on experience, until the desired frequencies and/or modes are found. These methods4,5 are usually very time-consuming and cannot guarantee to find the desired frequencies. An inverse structural modification, on the other hand, takes the desired modal properties as the targets to determine the required modifications, so that the modified model certainly gains the desired dynamic characteristics.6,7
In fact, usually, only some of the natural frequencies of a structure determine its dynamic behaviour, which means only a subset of its natural frequencies needs to be assigned. However, the theoretically determined structural modifications for the assignment of a natural frequency subset tend to cause the unassigned natural frequencies to shift as well, known as spillover of natural frequencies, which may lead to unpredictable or undesirable dynamics of the structure. Partial frequency assignment aims at keeping the unassigned natural frequencies unchanged, when reassigning a subset of natural frequencies of a structure. In recent years, there has been much research on partial eigenvalue/frequency assignment.
In early active control, a first-order system is used for partial eigenvalue assignment. Saad et al. 8 use a projection technique and a variant of Weilandt’s crunch technique for partial pole assignment of linear control systems. It is capable of making pole allocation for large systems. Datta et al. 9 use a parametric algorithm to solve some eigenvalue problems of linear systems. This method provides a parametric algorithm for making partial eigenvalue assignment. It offers an opportunity to devise a robust solution to the problem by exploiting the arbitrary nature of the parameters. Inspired by the research results of Brauer, 10 Araújo et al. 11 propose an eigenvalue perturbation theorem and apply it to the partial eigenvalue assignment of second-order linear dynamic systems. This method employs multiplicative perturbation and introduces static output feedback of system acceleration to solve the partial eigenvalue assignment problem and is applicable to static acceleration output feedback in an undamped second-order system. Ram et al. 12 propose a method based on measured receptances for the pole/zero assignment problem of active vibration control, and demonstrate the feasibility of the method with several theoretical examples. System matrices can be computed by using the finite element method, but there are always some modelling assumptions, and validated models are expensive to obtain. In contrast, receptances are readily available from modal tests. Mottershead et al. 13 propose an eigenvalue assignment method for active vibration suppression based on the output feedback and receptance method. The use of output feedback allows collocated actuator-sensor arrangements, but this necessitates the development of nonlinear characteristic equations in the control gains. Bai et al. 14 use the system matrix and receptance measurements to solve the partial quadratic eigenvalue assignment problem for a multi-input vibration system using a multi-step hybrid approach. Although the multi-step hybrid method is effective for solving the multi-input partial quadratic eigenvalue assignment problem, it is time-consuming. Zhang et al. 15 propose an algorithm to solve the partial eigenvalue assignment problem of multi-input state feedback based on the transfer eigenvalue matrix and the receptances. Ariyatanapol et al. 16 adopt the receptance method and propose a time-delay partial pole placement method for asymmetric systems based on single-input state feedback control, and the effectiveness of the method is proved by numerical examples of friction-induced vibration of a six-degree-of-freedom (DoF) structure and binary flutter of a rectangular wing.
Guzzardo et al. 17 present a method to find the optimal positions of the actuators and their gains in actively controlled vibration systems, thereby minimizing the control effort. Baddou et al. 18 propose a new partial eigenstructure assignment method, which can be used in cases where other methods are not applicable, especially those present by Benzaouia. 19 Liu et al. 20 propose a method to solve the eigenvalue assignment problem of the output feedback part of the undamped structural system with the output matrix as the design parameter. Hu et al. 21 propose a constant output feedback control that handles actuator and sensor configurations and uses the output matrix as a design parameter, which can solve part of the eigenvalue and eigenstructure configuration problems of an undamped vibration system. Wei et al. 22 propose a new dual-input control theory including position, velocity and acceleration feedback, which is suitable for active vibration control with unreachable degrees of freedom, and obtain a new partial eigenvalue assignment method. Motta et al. 23 propose a new partial eigenvalue assignment method, which is capable of reassigning a set of undesired eigenvalues by computing the feedback matrices for velocity and displacement and the influence matrix of actuators in a vibrating system. Belotti et al. 24 propose a novel method for pole placement of linear systems through state feedback and rank-one control. Rather than assigning all the poles to the desired locations of the complex plane, the proposed method assigns only the dominant poles, while leaving others free to assume arbitrary positions within a pre-specified region in the complex plane. The methods described above are all improvements to the active control method, which increases its applicability and promotes the development of control theory. However, the disadvantages of expensive active control equipment and complicated repair and maintenance cannot be changed. Furthermore, the scope of applications of these improved active control methods remains limited.
In active control, spillover can be easily avoided, as manifested in the literature by the sufficient and necessary conditions 25 to ensure that the unassigned eigenvalues remain unchanged. Although an active control method can avoid spillover of a structure, its use requires high cost and high technical requirements,26,27,28 which becomes infeasible for structures with a large number of degrees-of-freedom and continuous structures. In contrast, passive control in the form of structural modifications is always stable, as long as some simple and easy-to-satisfy requirements are met (concerning the definiteness of the system matrices). A structural modification does not require sensors and actuators and is inexpensive and is applicable to large structures. 29 In general, physical models30,31,32,33 or modal models34,35 of structures can be employed for inverse structural modification. However, for a complex structure, the theoretical model (usually a finite element model) is often simplified, often causing a modal truncation problem. It is difficult to obtain accurate structural data (material structure and geometry structure) and modal data, which impedes the use of passive control methods. In experiments, the modal data of complex structures are also difficult to measure accurately, which brings difficulties to active control methods. However, the emergence of the receptance36,37,38 solves the problem that passive control cannot accurately obtain model structural data and accurate modal data. At the same time, the receptance method also solves the problem that it is difficult to obtain accurate measurement data in active control. The above-mentioned active control method for partial eigenvalue assignment of vibration systems has been widely used, but this methodology has a high technical requirement and is expensive. The passive control method adopted in this paper is easy to operate, inexpensive and easy to implement.
Mermertas et al. 39 propose using springs to maintain the fundamental frequency of rectangular thin plates with an arbitrary number of point masses. Caracciolo et al. 40 put forward a design method for a linear vibratory feeder based on the inverse structure modification method, improve the vibration characteristics of the linear vibratory feeder and produce a laboratory vibrating linear feeder to verify the design method. Zhu et al. 41 propose an optimal selection method and absolute value method to maintain a specific natural frequency based on the Sherman–Morrison formula. Both of these methods are achieved by installing springs on system and can eliminate the effect of the additional mass on specific frequencies. This method is not suitable for some structures that do not allow the installation of additional springs. Zhang et al. 42 propose a reception-based frequency assignment method for combined structures. Ren et al. 43 use a genetic algorithm to add mass and stiffness to the original structure based on the frequency response function, and realize the assignment of the original structure’s natural frequency. Belotti et al. 44 use the Taylor expansion approximation of the eigenfrequencies in the neighbourhood of a configuration choice, redefine the eigenfrequency assignment as a quadratic programming problem, and design flexible-link multibody systems with a desired eigenfrequency. The methods described above are all geared toward natural frequency assignment for simple structures and are incapable of or cumbersome in dealing with natural frequency assignment in large systems. Furthermore, when performing natural frequency assignment, the above methods do not take into account the problem of frequency spillover. The frequency spillover problem will seriously affect the dynamic characteristics of the structure, causing it to malfunction and even to fail.
Ouyang et al. 45 seem the first researchers that succeed in making partial assignment of natural frequencies, albeit for simple-connected series mass-spring systems and multi-connected mass-spring systems. Belotti et al. 25 propose a three-step procedure to assign a subset of natural frequencies with very low spillover, taking into account the prescribed eigenvalues and feasibility constraints, and demonstrate its application in examples of a simply connected series mass-spring system and an Euler–Bernoulli cantilever beam. Furthermore, Chen et al. 46 extend Ouyang and Zhang’s work 45 to simplified models of marine diesel engine propulsion systems and complex branch shaft systems of diesel generator sets, and partial eigenvalue assignment is accomplished through structural modification using the gradient flow method. Although some of the above methods consider frequency spillover, they are highly mathematical and are difficult to implement and apply to complicated structures. The inverse structural modification method proposed in this paper has low theoretical requirements, high versatility and ease of implementation.
At present, there are not many partial frequency assignment methods based on inverse structure modification. Partial frequency assignment method with inverse structure modification is used, most of which are only for systems with a specific structure. The majority of existing partial eigenvalue modification methods are valid for discrete structures, with very few studies on the assignment of partial eigenvalues for (discretised) continuous structures. Furthermore, profound mathematical theory for partial eigenvalue assignment must be used, and these methods are frequently restricted to some special structures, requiring strong mathematical ability of the users. Based on an intelligent algorithm, this paper proposes a general inverse structure modification method, which can make partial frequency assignment to not only discrete structures, but also discretised continuous structures, and the method is simple and efficient.
The paper is structured as follows. In Section 2, the theoretical approach is described in detail. In Section 3, the effectiveness of the method is demonstrated using an example of a discrete structure and two discretised continuous structures. Finally, in Section 4, conclusions are drawn.
Methodology
Method overview
The free vibration of an n-degree-of-freedom undamped discrete or discretised structure is governed by equation (1), where


Figure 1 depicts the traditional information flow from GUI to ABAQUS/CAE in ABAQUS. The interactive program compiles the user-created structural finite element model in the GUI, which is then converted into an inp file by the ABAQUS/CAE pre-processor. The inp file contains all model data of the structural finite element model, such as nodes, elements and materials. The user submits the inp file to the ABAQUS solver for modal analysis, and the structure’s eigenvalue data is saved to the dat file. Traditional communication relationship between GUI and ABAQUS/CAE.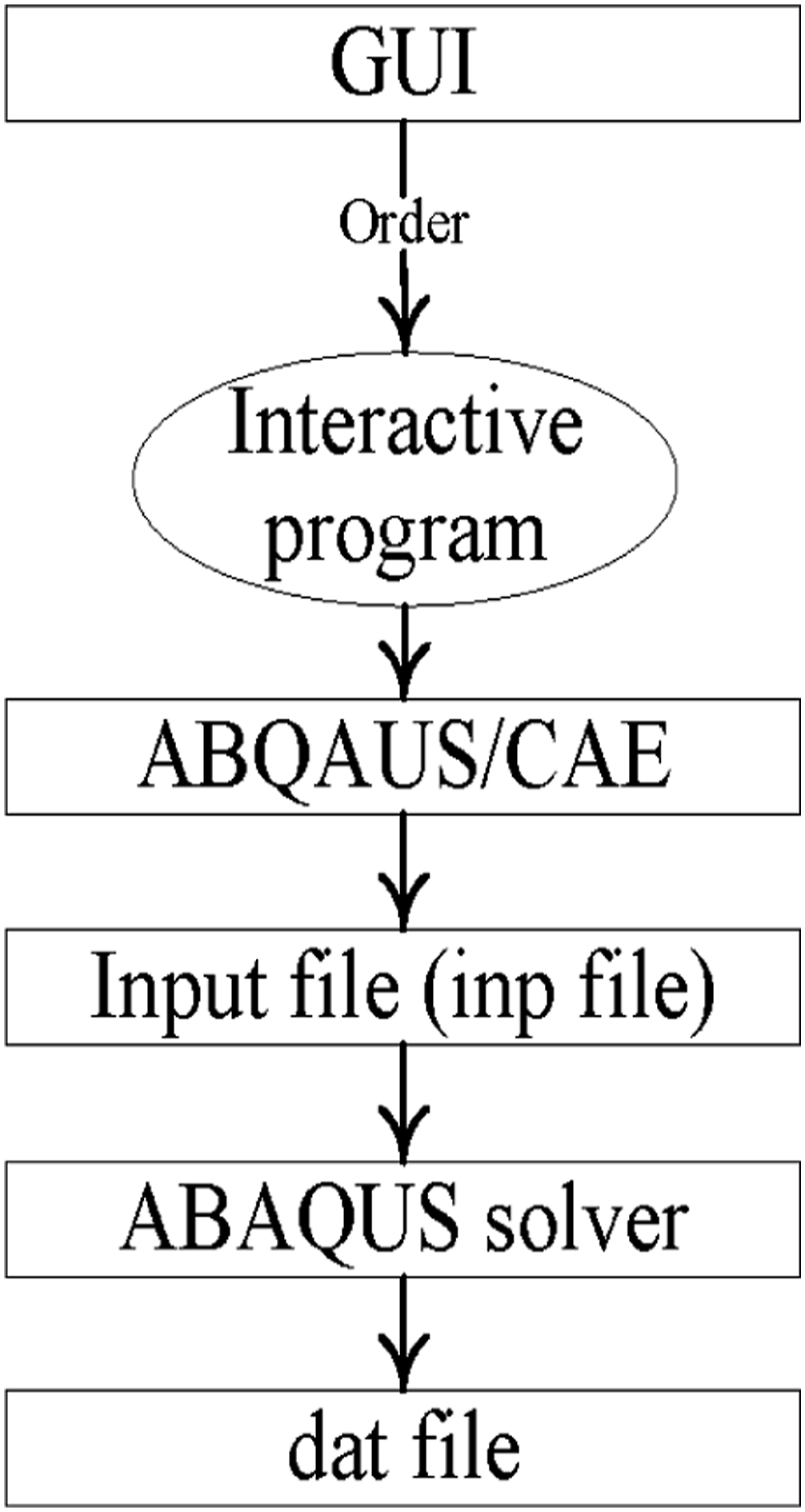
In this paper, MATLAB combines PYTHON to carry out secondary development of ABAQUS, builds a MATLAB-PYTHON-ABAQUS data interaction system and realizes structure modification, as shown in Figure 2. The precise steps are as follows: In the first step, MATLAB first determines the numerical values of the structure modification, and then calls PYTHON to modify the structure’s model data in the inp file to the values from MATLAB to realize the structure modification. In the second step, MATLAB submits the inp file to the ABAQUS solver to complete the structure’s modal analysis. In the third step, MATLAB calls PYTHON to read the structure’s eigenvalue data from the dat file. The optimization algorithm is introduced in MATLAB to continuously modify the structure iteratively by modifying the inp file, so that in the end the structure’s eigenvalues become the required target eigenvalues. MATLAB-PYTHON-ABAQUS data interaction system.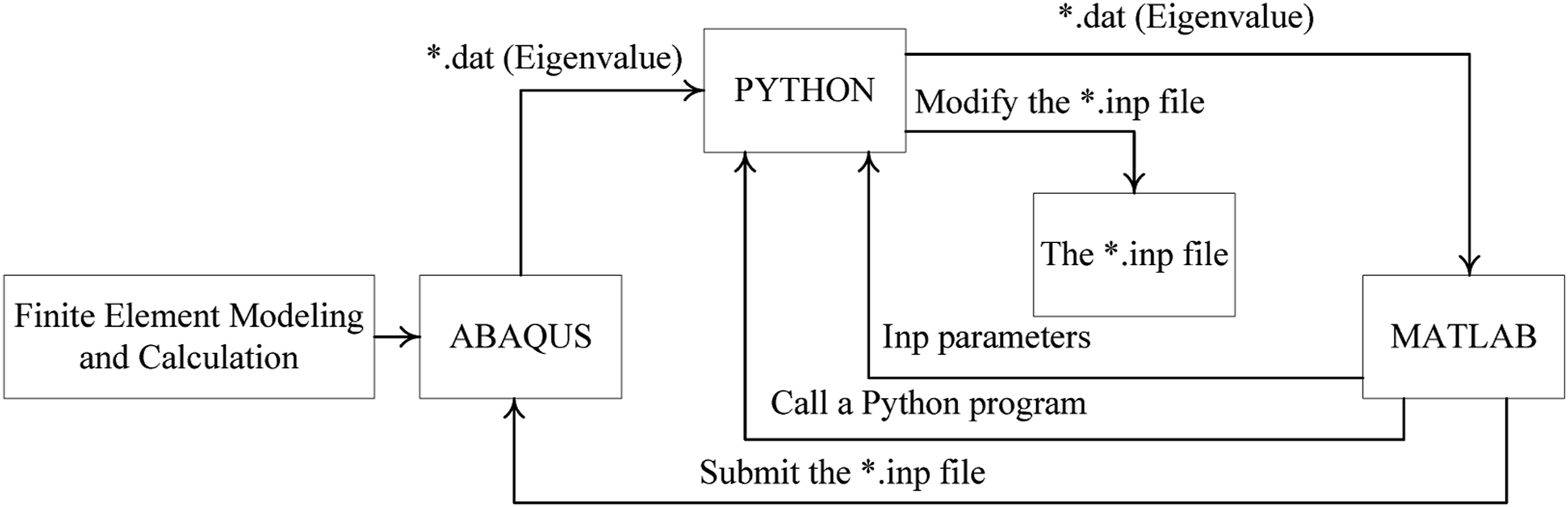
The eigenvalues read from the dat file by MATLAB-PYTHON-ABAQUS data interaction system are denoted by
In the first step, the multi-population genetic algorithm is introduced into the ABAQUS-PYTHON-MATLAB data interaction system, which is a new approach for partial eigenvalue assignment of the structure, as shown in section 2.2.1. The multi-population genetic algorithm performs global optimization on the structural parameters within the given structural parameter constraint intervals, finds the optimal value of the structural parameters and realizes the partial eigenvalue assignment of the structure. For discrete or discretised structures, the multi-population genetic algorithm obtains the optimal values of the structural parameters mass
The same method can also be used for discretised continuous structures. For these structures, the multi-population genetic algorithm obtains the optimal value
A pair of

In the second step, for the discrete structure in this paper, the radial basis function neural network (RBF NN) is trained using the
The specific process of these two steps will be described separately in the following subsections.
Algorithm implementation
Multi-population genetic algorithm
Parameter values of SGA in MPGA.

There will be many degrees of freedom because the structure is discretized using the finite element method. If the theoretical method is used, the resulting mathematical model can be complex and massive. The multi-population genetic algorithm is combined with the MATLAB-PYTHON-ABAQUS data interaction system to form a new approach for making partial eigenvalue assignment of the structure, which can avoid the complex formulations required to make partial eigenvalue assignment in other researcher’s works, as shown in Figure 3. A new approach to the structure’s partial eigenvalue assignment.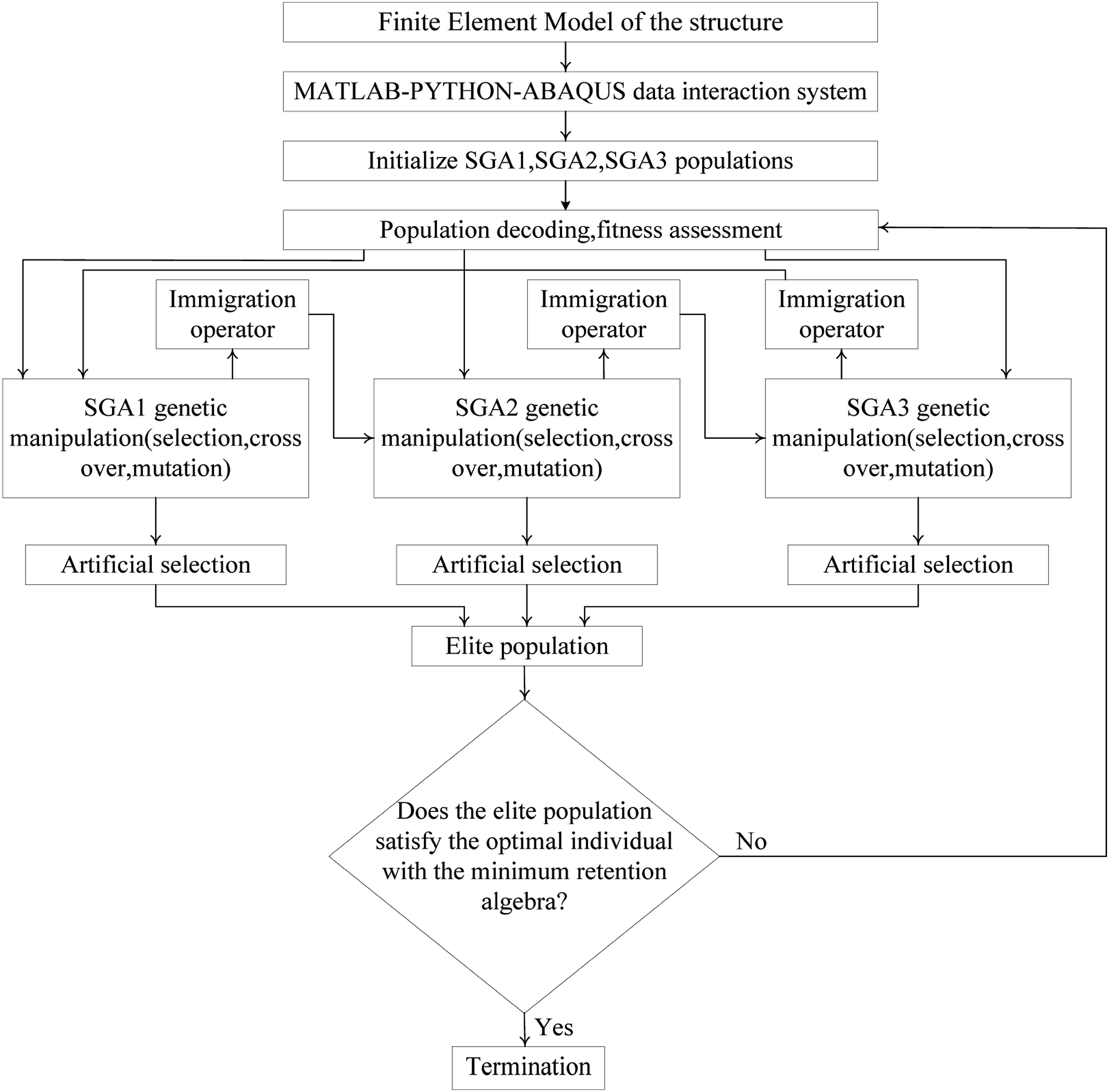
Since structures usually have a large number of degrees of freedom, Zhang et al.
51
proposed a method of changing a subset of eigenvalues and keeping another subset of eigenvalues, without considering the remaining eigenvalues (without considering those of remaining eigenvalues that are sufficiently far away from the target eigenvalues), to realize the partial eigenvalue assignment of the structure. Because the example used in this paper has few degrees of freedom, all degrees of freedom of the structure are considered, though this will slow down the algorithm’s solution speed. In order to realize the partial eigenvalue assignment of the structure, the objective function of SGA in MPGA is given in equation (4). MPGA performs a global optimization of the structural parameters within the structural parameter constraint interval of the finite element structure in a new approach to the structure’s partial eigenvalue assignment, so that the objective function error obtains the minimum value. When the error approaches zeros, satisfying 
Example of the mass-spring system structural parameters.

Example of

Example of the cantilever beam structural parameters.

Example of

Radial basis function neural network
MPGA realizes partial eigenvalue assignment for the finite element structure in section 2.2.1, and obtains the optimal values of the structure parameters. The topology of the radial basis function neural network model.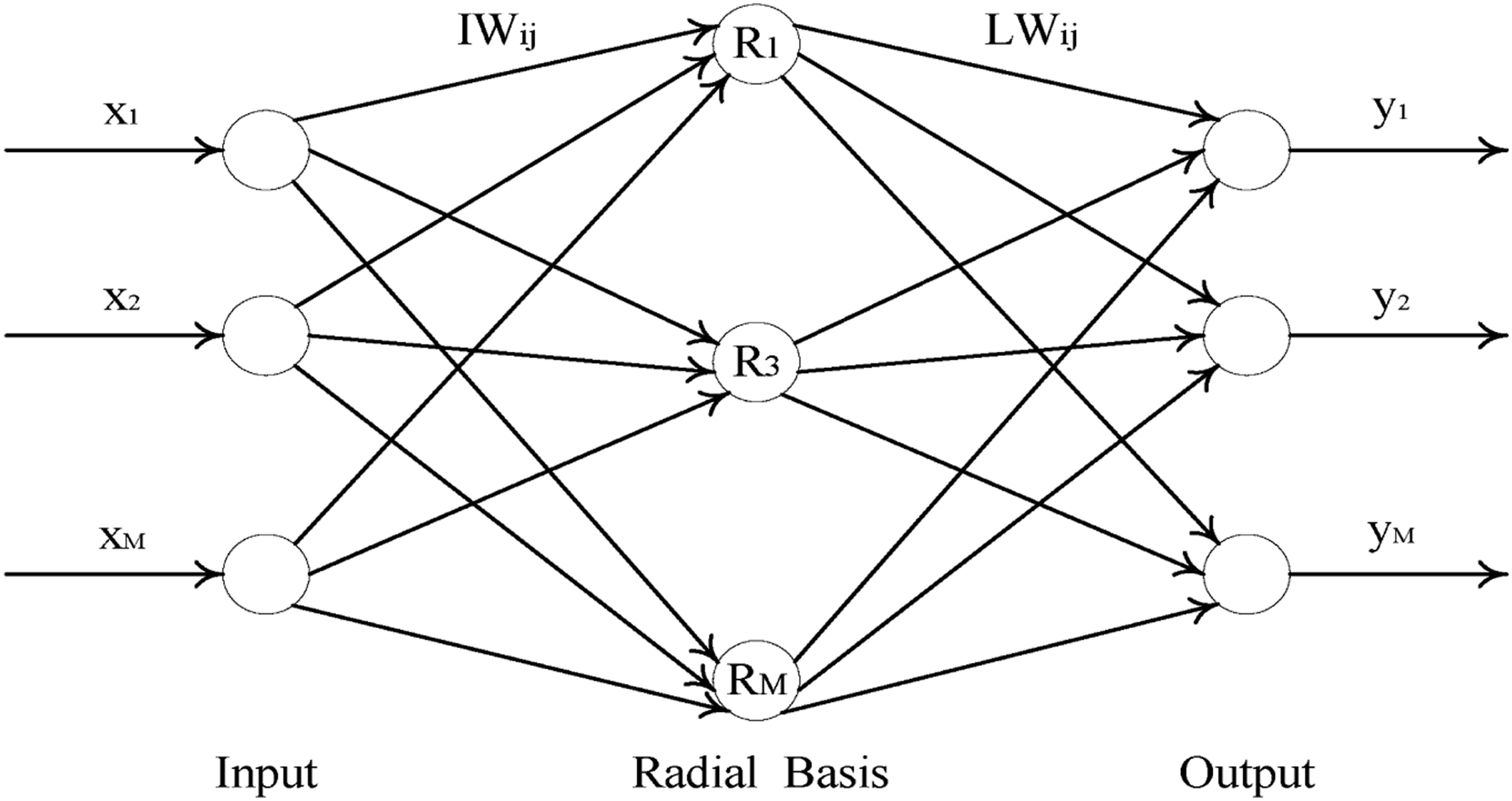
The radial basis function of the radial base layer is a Gaussian radial basis function, as shown in equation (5).
The number of neurons in the radial base layer is equal to the number of input vectors, and each neuron has a centre point, which is the weight 

The radial base layer to the output layer is a linear layer, and the transfer function of the neurons in the output layer is the purelin function. Knowing the output value 
The RBF NN completes the simulation of the relationship between the structural parameters and eigenvalues of the finite element structure by training on the
In this section, MPGA is described to assign eigenvalues of the structure in order to obtain the optimal values of the structure parameters and determine the structure
Numerical examples
A new approach to the structure’s partial eigenvalue assignment and the RBF NN are used to realize partial eigenvalue assignment for structures, and this method has been implemented in MATLAB. This section provides three examples of partial eigenvalue assignment for structures to demonstrate the method’s capability.
Mass-spring system
Spillover-free partial eigenvalue assignment for a single-connected mass-spring system was addressed in Ouyang.
45
The example is used in this paper to demonstrate the proposed method’s ability to perform partial eigenvalue assignment to discrete structures. This is a five-DOF ‘fixed-free’ mass-spring system, as shown in Figure 5. Five degrees of freedom ‘fixed-free’ mass-spring system.
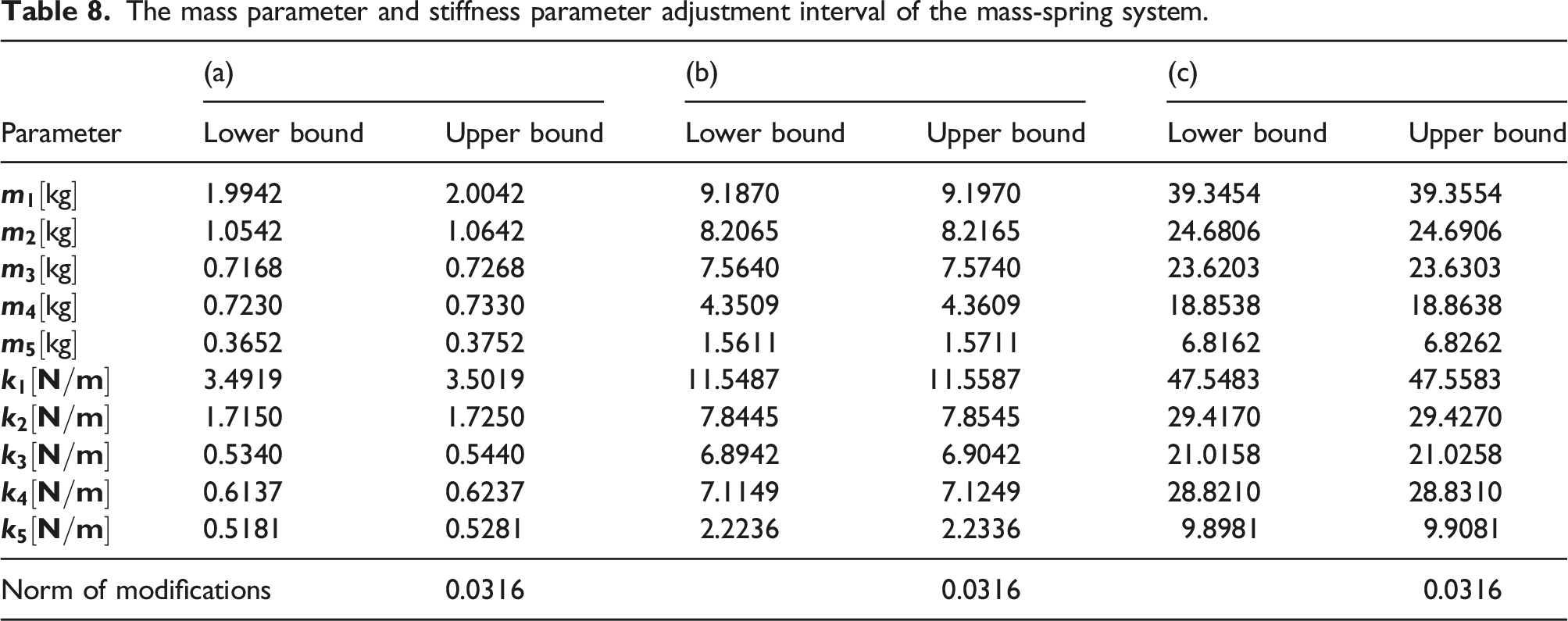
In the second column of Table 6, the initial values of the mass and stiffness of the mass-spring system are shown, and the corresponding eigenvalues are shown in the second column of Table 7. It is intended to determine the mass and stiffness values of the mass-spring system so that the first two lowest eigenvalues are equal to (a) The constraint interval of mass (b) The constraint interval of (c) The constraint interval of The mass-spring system’s mass and stiffness parameter values. The mass-spring system’s eigenvalue parameter values. The mass parameter and stiffness parameter adjustment interval of the mass-spring system.
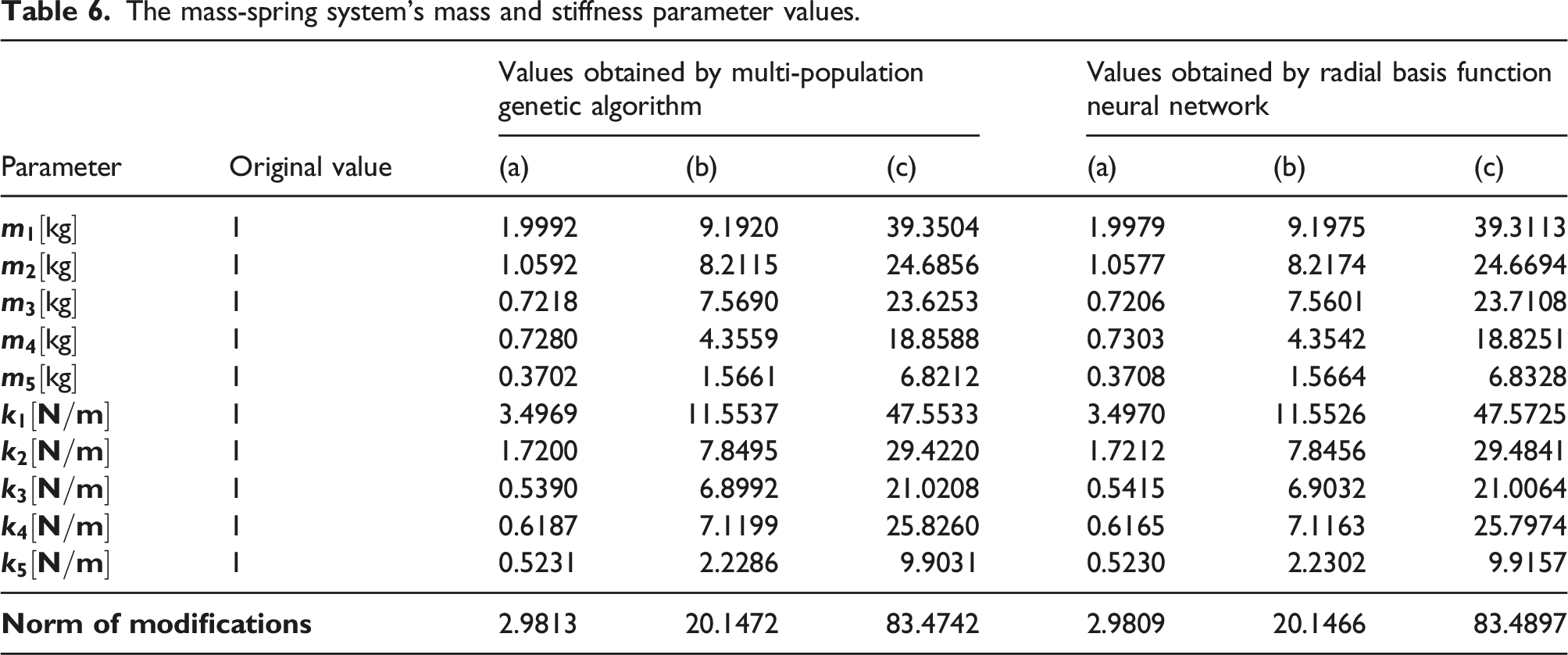
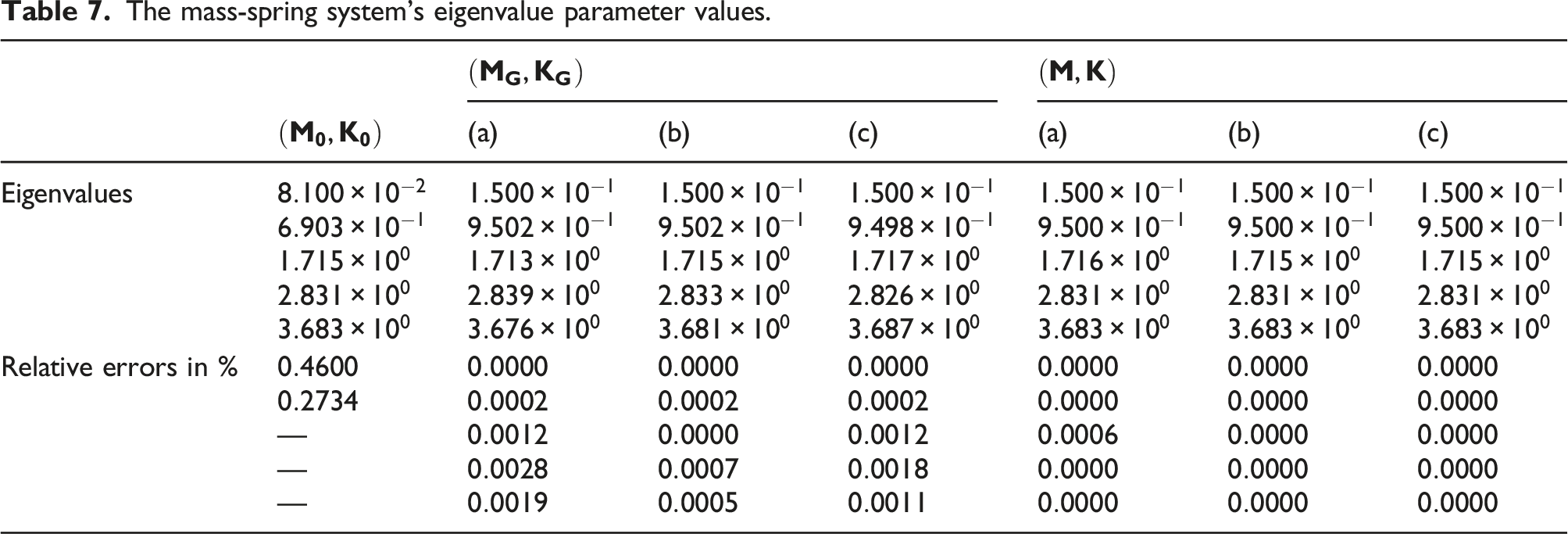
The three groups of data in (a), (b) and (c) show that there can be a variety of schemes of structural modifications to achieve the required partial eigenvalue assignment, and all of them differ from those determined in Ouyang, 45 indicating the non-uniqueness of partial eigenvalue assignment parameter modifications. It can be concluded from Table 7 that this method can achieve accurate assignment of the target frequency without frequency spillover for the partial frequency assignment of the mass-spring system, like the method proposed by Ouyang and Zhang. 45 It should also be pointed out that the solution of Ouyang and Zhang 45 can also be found by the presented approach (when a suitable constraint interval is specified). Since the accuracy of the results obtained using the authors’ method are the same as that of Ouyang and Zhang, 45 they are not shown in this paper. Three other sets of solutions are listed in this paper, which also prove the method’s effectiveness in the partial eigenvalue assignment of discrete structure.
It can be observed from Table 6 and Table 8 that the parameter values for eigenvalue assignment are increasing from sets (a) to (b) to (c). Usually, bigger modifications tend to be more costly and thus undesirable. The ‘effort’ of modifications can be measured by the norms of the vector of structural modifications, which are given in the last row of Table 6 and Table 8.
Cantilever beam
The performance of the proposed method for partial eigenvalue assignment of discretised continuous structures is demonstrated using an Euler–Bernoulli cantilever beam. Belotti et al. 25 studied the problem of partial eigenvalue assignment of an Euler–Bernoulli cantilever beam.
For an Euler–Bernoulli cantilever beam with equal section length 

The first six eigenvalues of the cantilever beam length
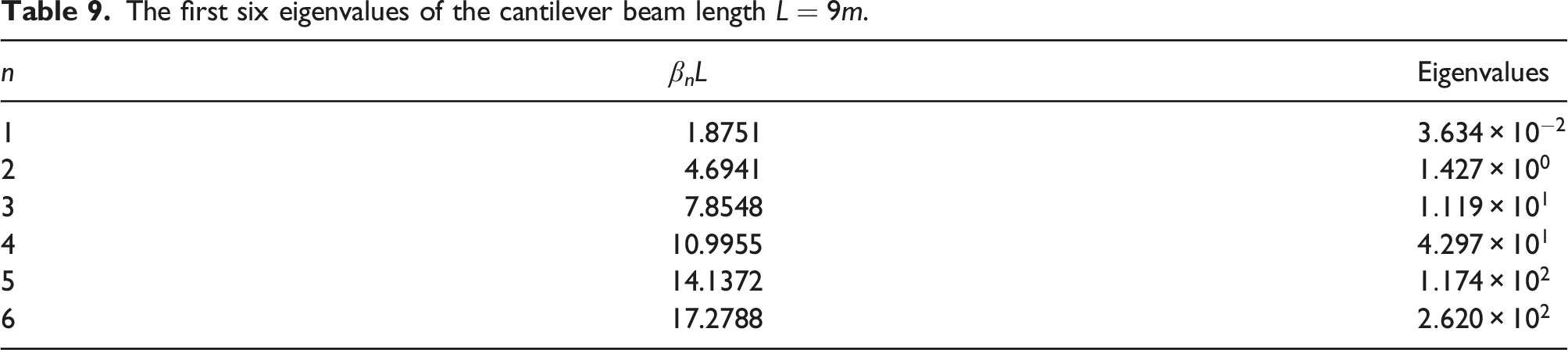
The Euler–Bernoulli cantilever beam in this paper is made up of 12 Euler–Bernoulli beam elements of length Cantilever beam. Analytical and finite element solutions for cantilever beam eigenvalues.
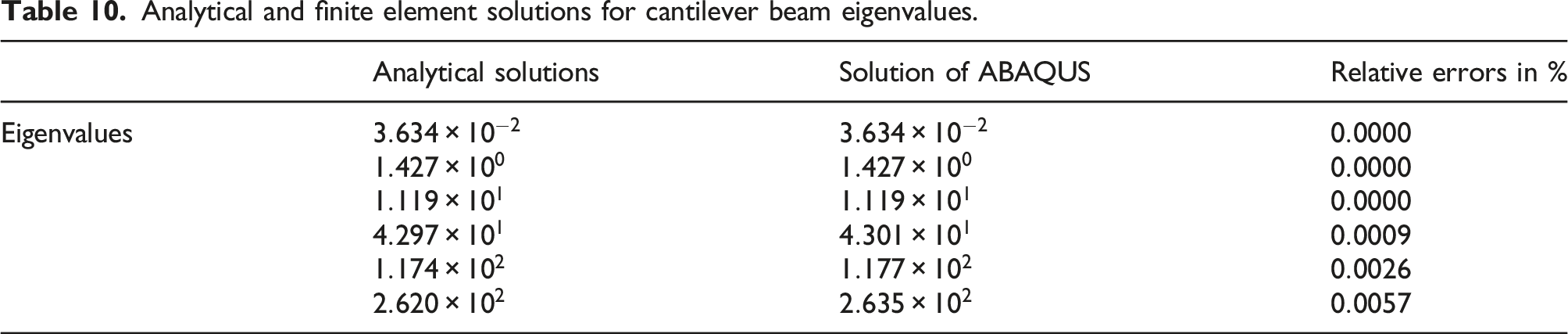
In order to be consistent with Belotti et al.’s paper,
25
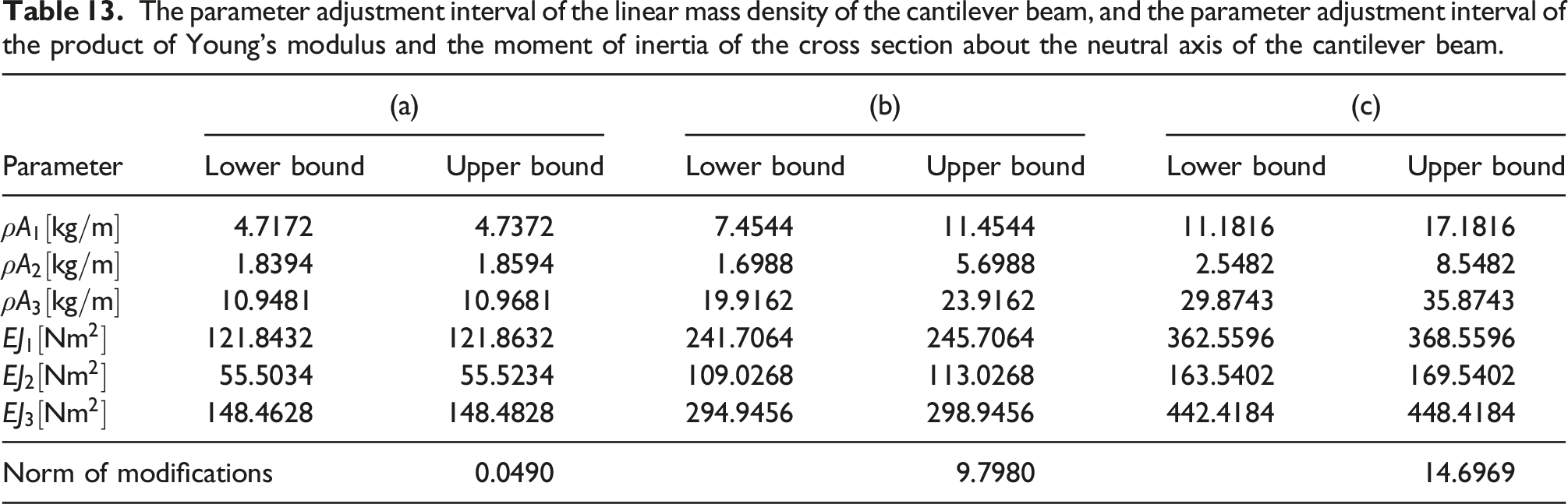
the three lowest eigenvalues (a) The constraint interval of the linear mass density (b) The constraint intervals of (c) The constraint intervals of The linear mass density of the cantilever beam, and the product of Young’s modulus and the moment of inertia of the cross section about the neutral axis of the cantilever beam. The cantilever beam’s eigenvalue parameter values. The parameter adjustment interval of the linear mass density of the cantilever beam, and the parameter adjustment interval of the product of Young’s modulus and the moment of inertia of the cross section about the neutral axis of the cantilever beam.
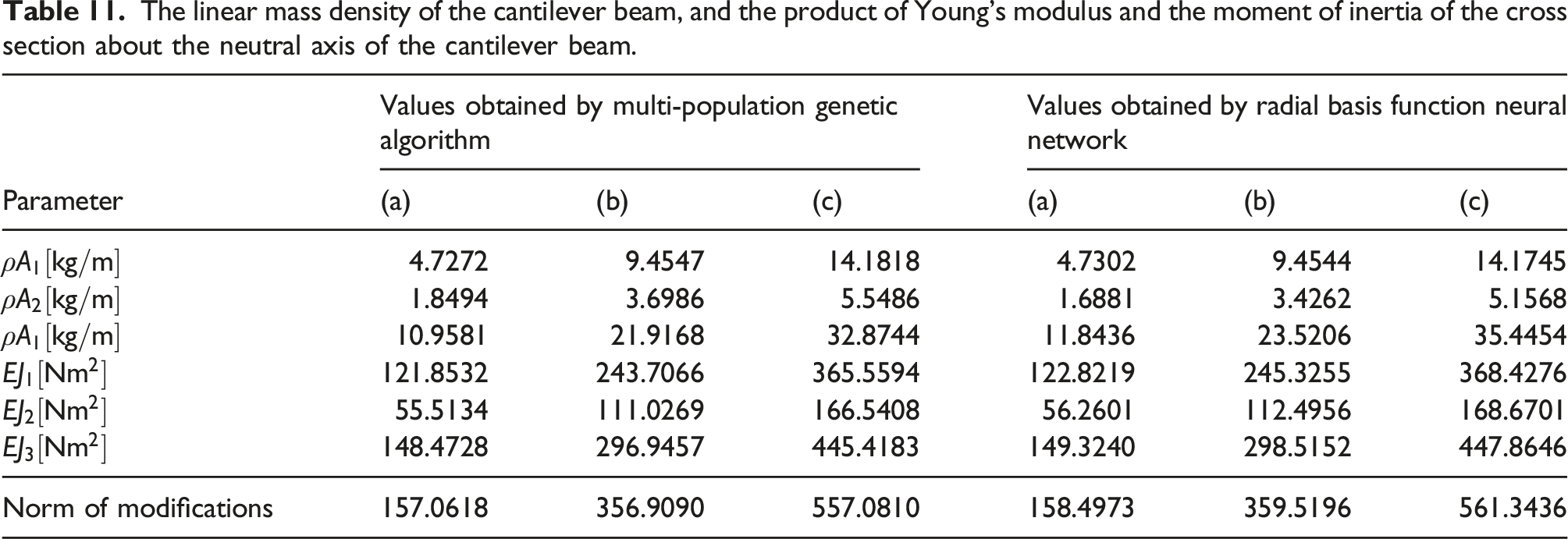
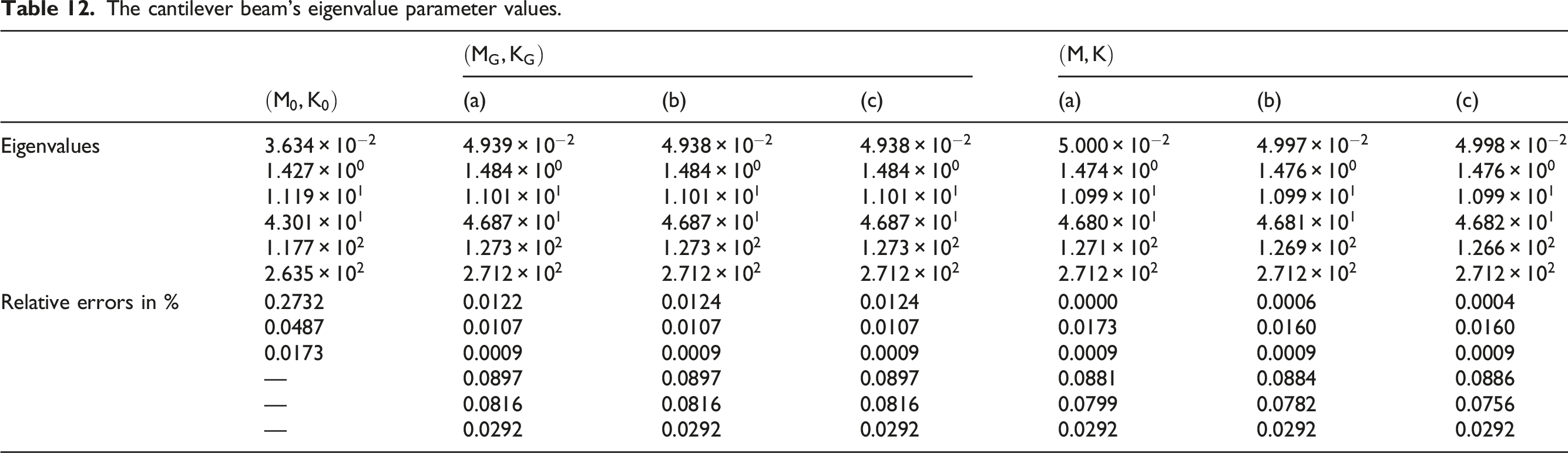
From the three sets of data in (a), (b) and (c), there can be various parameter modifications for the partial eigenvalue assignment of discretised continuous structures. These results show that the three smallest eigenvalues assigned to discretised continuous structures are all close to the target eigenvalues. At the same time, the amount of spillover of the remaining unassigned eigenvalues is low. This method’s ability to assign low-frequency eigenvalues of discretised continuous structures is demonstrated. At the same time, when the accuracy of assigning the target frequency and the degree of spillover are considered, this method performs better than the method proposed by Belotti et al. 25
It can be observed from Table 11 and Table 13 that the parameter values are increasing from sets (a) to (b) to (c). The ‘effort’ of modifications can be measured by the norms of the vector of structural modifications, which are given in the last row of Table 11 and Table 13. A lower norm is usually desirable.
Door frame
As shown in Figure 7, (a) door frame is made up of three Euler–Bernoulli beam elements with lengths Door frame.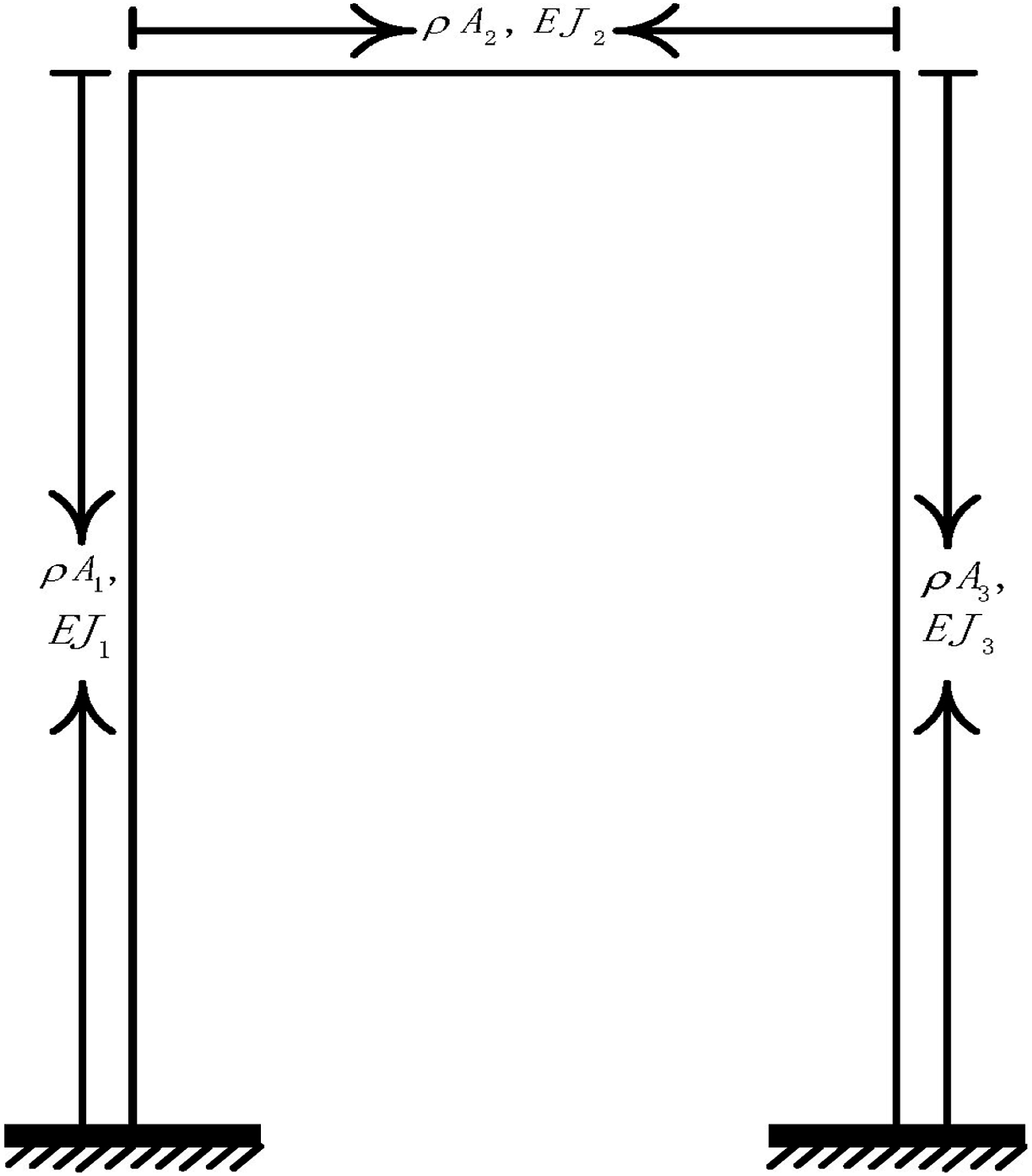
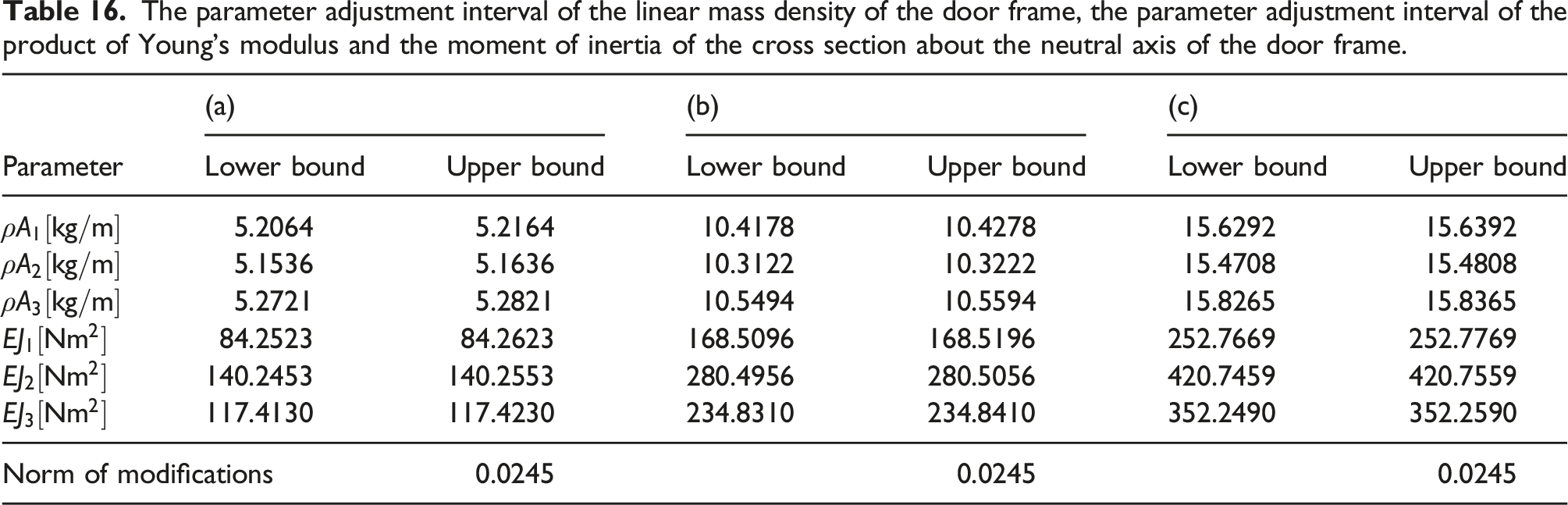
The ability to make partial eigenvalue assignment to discrete structures and discretised continuous structures is shown in section 3.1 and section 3.2, respectively, and the required structural modifications to low-frequency eigenvalues are also shown. Usually, it is more difficult to assign high-frequency eigenvalues. In section 3.3, modifications required to assign high-frequency eigenvalues are determined. It is intended that the door frame’s high-frequency eigenvalues should be (a) The constraint interval of the linear mass density (b) The constraint intervals of (c) The constraint intervals of The linear mass density of the door frame, and the product of Young’s modulus and the moment of inertia of the cross section about the neutral axis of the door frame. The door frame’s eigenvalue parameter values. The parameter adjustment interval of the linear mass density of the door frame, the parameter adjustment interval of the product of Young’s modulus and the moment of inertia of the cross section about the neutral axis of the door frame.
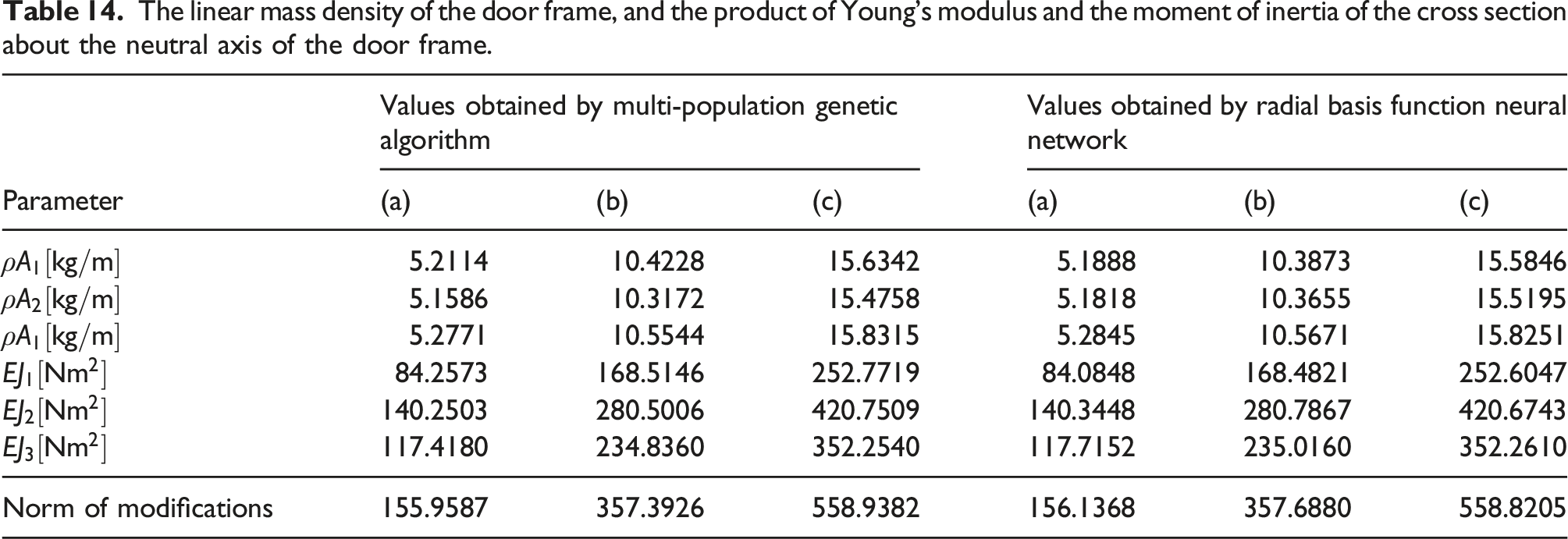
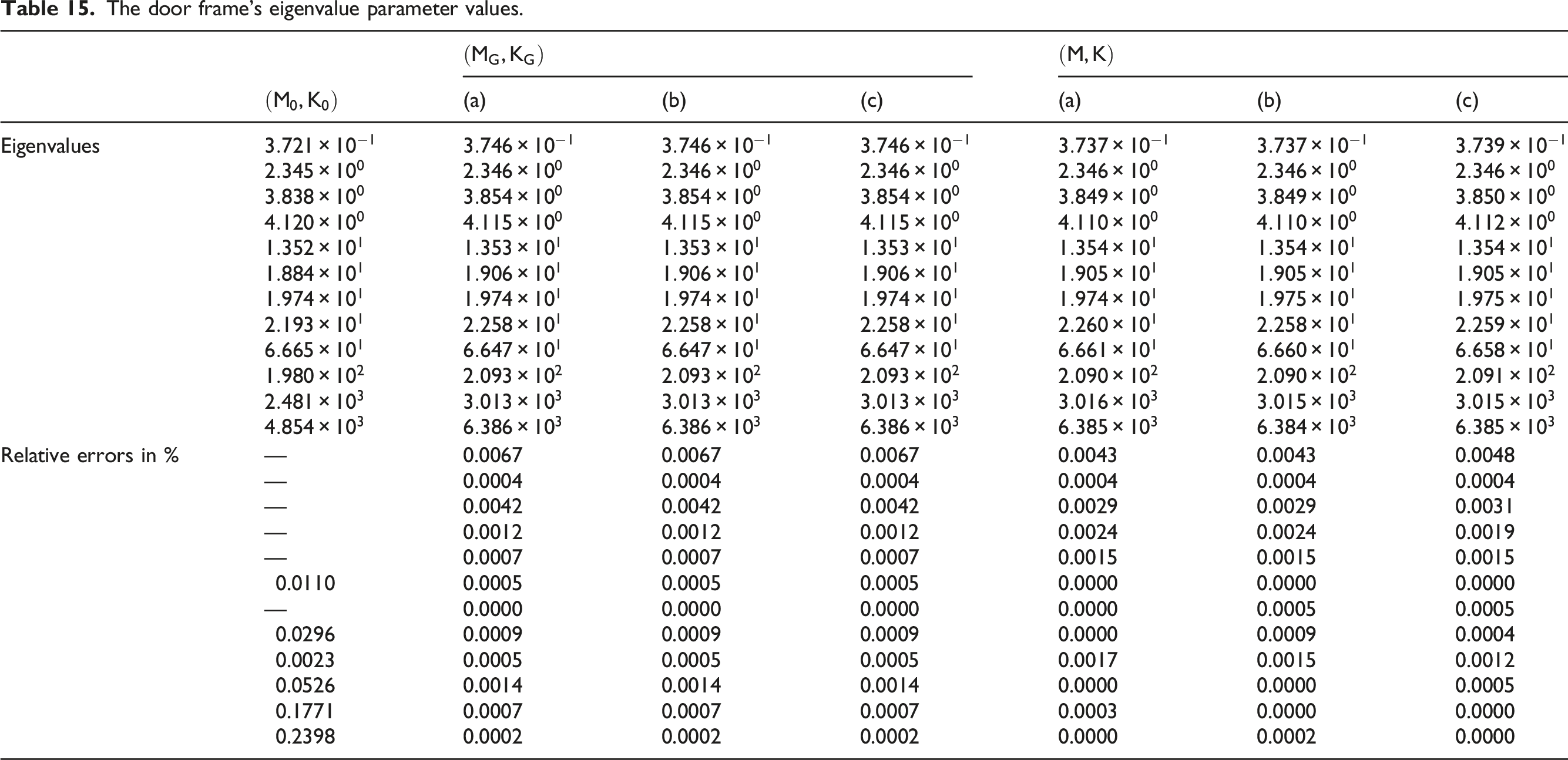
From the three sets of data in (a), (b) and (c), it can be seen that the six high-frequency eigenvalues assigned to the structure are all close to the target eigenvalues, and the remaining unassigned eigenvalues have a very low level of spillover. Therefore, the method’s ability to perform partial eigenvalue assignments for high-frequency eigenvalues is demonstrated. Because assigning high frequencies to structures is difficult, most existing methods focus on assigning low frequencies to structures. This method is shown to be capable of high-frequency assignment of structures.
Again, the norms of modifications are increasing from sets (a) to (b) to (c). Therefore, the modifications (a) are more desirable.
Conclusions
A method for making eigenvalue assignment with low spillover for undamped structures is proposed in this paper. It combines a multi-population genetic algorithm and an RBF NN and implemented on a MATLAB-PYTHON-ABAQUS data interaction system. It has the advantage of being easy in determining the structural modifications required to make partial eigenvalue assignment, in comparison with other methods. Three numerical examples (a lumped mass-spring chain, a discretised cantilever beam and a discretised door frame) are used to show the capability and the procedure of the method. The above three numerical examples show that the method has good applicability. The results indicate that low-frequency eigenvalues and high-frequency eigenvalues can be assigned while all the other eigenvalues undergo very small changes (very low level of spillover), which is virtually equally useful as a proper partial eigenvalue assignment whose solution are much more difficult to find or often do not exist.
Because the method proposed in this paper uses the finite element method, the calculation time is determined by the computer’s performance. Its greatest advantages include universal applicability to both discrete structures and discretised continuous structures. The main shortcoming is that it requires construction of a detailed finite element model, while some other methods (those receptance-based methods) use measured frequency response functions and do not require a theoretical model of the structure.
Footnotes
Acknowledgements
The authors would like to thank their institutions for the support.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.