
Abstract
In order to address the problems of insufficient load capacity and rotor vibration, an active fluid-film bearing lubricated with magnetorheological fluid (MRF) is proposed. First, the geometry of the MRF fluid-film bearing is designed and its intelligent lubrication mechanism is analyzed to clarify its advantages. In addition, mathematical model of MRF fluid-film bearing-rotor system is derived, and FEM model is utilized to obtain stiffness and damping coefficients to supplement mathematical model. Moreover, an improved gray wolf optimization (IGWO) algorithm is developed to tune the PID controller parameters. The validity of the proposed method is verified by numerical simulation. Furthermore, the simulation results show that with the increasing of current magnitude, the orbits of shaft center decrease. Under the presence of magnetic fields, the shaft center orbits of the MRF bearing can converge to a point, and therefore this bearing has ability to suppress rotor vibration. Finally, IGWO-PID controller has better response characteristics than GWO, PSO, and GA algorithms, and hence the IGWO algorithm can find the more appropriate PID controller parameters, that the validity of the improved algorithm is further proved. Therefore, the active bearing and its research findings provide new reference for MRF vibration control in the field of journal bearing lubrication.
Keywords
Introduction
Fluid-film bearings are widely used in industry for applications of rotating machines.1,2 Apart from having a long service life, their capability to cause low shear levels and to support high payload show the advantages of using them. Although these advantages, the researchers are striving to improve their performance to meet new requirements under different operating conditions.3,4 Through reading literature and actual investigations, the design of new bearing concepts,5,6 bearing geometries,7,8 and new lubricants9,10,11,12 are some approaches to increase performance of fluid-film bearing. Magnetorheological fluids (MRF) capable of controllable and reversible rheological properties are widely used in brakes,13,14 medical instruments,15,16 dampers,17,18 sealings,19,20 and other engineering fields.21,22 As a result, MRF as intelligent lubrication medium is applied to bearing to obtain the superior controllable performance under different operating situations.
The work of Hesselbach and Guldbakke23,24 was the first to apply MRF into hydrostatic bearing lubrication. Under different payloads, their hydrostatic thrust bearing was able to maintain a constant gap with the help of MRF behavior. In addition, by experimental validation, it is concluded that it would achieve quasi-infinite stiffness in the closed loop control, and quicker response than conventional valve control system. In the study of hydrodynamic bearing lubricated with MRF, Furthermore, Gertzos et al.,
25
Bompos et al.,
26
and Sahu et al.
27
studied the operating parameters and pressure distribution of MRF fluid-film through numerical codes and hydrodynamic lubrication model. Researchers studied the difference between MRF and ferrofluid lubrication performance in fluid-film bearing.28,29 Compared with MRF, ferrofluid needs stronger current to achieve the same viscosity. Therefore, the energy consumption of MRF is lower than ferrofluid. As a result, the MRF in bearing application can have more advantages and better performances. Moreover, Bompos et al.30,31 and Wang et al.32,33 studied dynamic coefficients of the hydrodynamic bearing lubricated with MRF, whose tunable characteristics are responsible for the enhanced carrying capacity. Although higher friction losses are observed in the hydrodynamic bearing lubricated with MRF compared to the traditional lubricant oil, this work has verified that the fluid-film is thicker at low speed and pressure distribution is beneficial to supporting the heavier payloads.
34
Finally, Urreta and his research team
35
showed that 50
Control algorithms are widely used in the field of automatic control field,36,37 PID algorithm is one of useful control algorithms.38,39 It has been widely used in the active magnetic bearing control system and is usually used as the main controller of the system.40,41 Jonathan et al. 42 used particle swarm optimization (PSO) algorithm to optimize PID parameters and the performance of active magnetic bearing is evaluated. In addition, Bordoloi et al. 43 adopted genetic algorithm (GA) for the optimization of PID controller parameters in active magnetic bearing. Finally, Gupta et al. 44 utilized individually ant lion optimization (ALO), gray wolf optimization (GWO), and whale optimization algorithm (WOA) to calculate the gain parameters of the PID controller in magnetic bearing. It is reasonable to apply the GWO method to bearing radius clearance control; however, GWO has not been reported for vibration suppression in existing MRF bearing system yet. The reason is that GWO algorithm cannot be directly applied to a specific MRF bearing, and hence it is necessary to improve GWO algorithm to make it suitable for controller parameters optimization of the active MRF bearing. Because most of existing MRF bearing research focuses on the structure, functional design and identification of stiffness and damping coefficients, very limited work has considered precise orbit control in the MRF bearing design process. As a result, it is worth integrating a GWO-based controller into an active MRF bearing to make it ready for practical usage; especially in the high-precision machine tool application where MRF bearing is required to intelligently adapt to more critical operating conditions to enhance machining accuracy of workpiece.
A novel MRF fluid-film bearing based on an IGWO-PID controller is proposed in this work. First, the MRF fluid-film bearing is designed, and its intelligent lubrication mechanism is analyzed clarify its advantages. In addition, mathematical model of MRF fluid-film bearing-rotor system is derived, and FEM model is utilized to obtain stiffness and damping coefficients to supplement mathematical model. Moreover, an improved grey wolf optimization (IGWO) algorithm is developed to tune the PID parameters. The validity of the proposed method is verified by numerical simulation. Lastly, the simulation results show that with the increasing of current magnitude, the orbits of shaft center decrease. The shaft center orbits of the active MRF bearing can converge to a point in the action of external magnetic field. Finally, IGWO-PID controller has better response characteristics than GWO, PSO, and GA algorithms, and hence the IGWO algorithm can find the more appropriate PID controller parameters, that the validity of this algorithm is further proved.
The remainder of this paper is organized as follows. The structural design and mechanism of the MRF lubrication bearing are described and mathematical model of bearing-rotor system is derived in Section 2. In Section 3, the improved GWO algorithm is proposed, and its feasibility is verified. The simulations are carried out to verify that proposed bearing has better load capacity and smaller orbits of shaft center than traditional fluid-film bearing, and the proposed IGWO-PID controller parameters have better response characteristics in section 4. Conclusions and future works are summarized in section 5.
Theoretical model and methods
Geometric model of bearing lubricated with m
In this work, the characteristics of magnetorheological fluid are analyzed and utilized as lubricant in the bearing. The particles of MR fluid are in a disordered state in the absence of external magnetic field. While under the action of the magnetic field, the particles have an obvious orientation trend along the direction of the magnetic field.45,46 By changing the external magnetic field, the viscosity of the MR fluid can be adjusted freely.
Figure 1 shows the distribution of the magnetic particles in the radius gap. From Figure 1(a), while rotor is rotating at speed ω, magnetic particles show a normal distribution in the carrier fluid. However, due to the presence of a magnetic field, magnetic particles align along the direction of the magnetic field to form a chain-like structure in the Figure 1(b). In addition, particle chains are inclined because of the shear motion of rotor. As a result, the viscosity of MRF is dramatically increased, which offers enormous damping and stiffness, and therefore the MRF bearing can provide greater hydrodynamic pressure and hold up shaft more easily than traditional fluid-film bearing. Magnetic particles motion in the radius gap. (a) No magnetic field is applied. (b) Magnetic field is applied.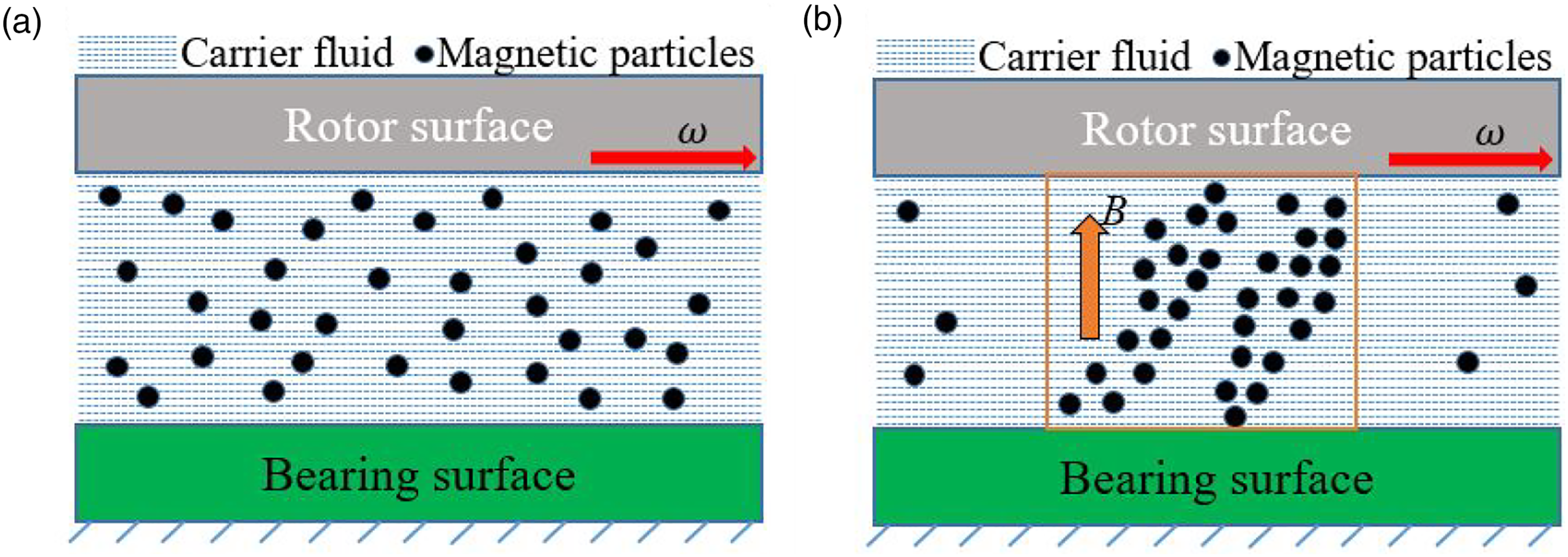
Applied cooperation between magnetorheological fluid and fluid-film bearing, a novel active fluid-film bearing lubricated with magnetorheological fluid is proposed in this research. As shown in Figure 2(a), it consists of bearing, shaft, silicon steel sheets, and coil, which is wound around a silicon steel sheets and excited by DC power to produce magnetic field. The narrow radius clearance between bearing and shaft fills up with magnetorheological fluid, which can avoid friction between them. The main structural parameters of bearing and magnetorheological fluid are shown in Table 1. This work using magnetorheological fluid is MRF-132DG produced by Lord corporation,
47
which is formulated for general use in controllable, energy-dissipating application such as shocks, dampers, and brakes. Model of the active bearing lubricated with magnetorheological fluid. (a) 3-D structural model of the bearing. (b) Overview of the bearing control system. Main parameters of bearing and MRF.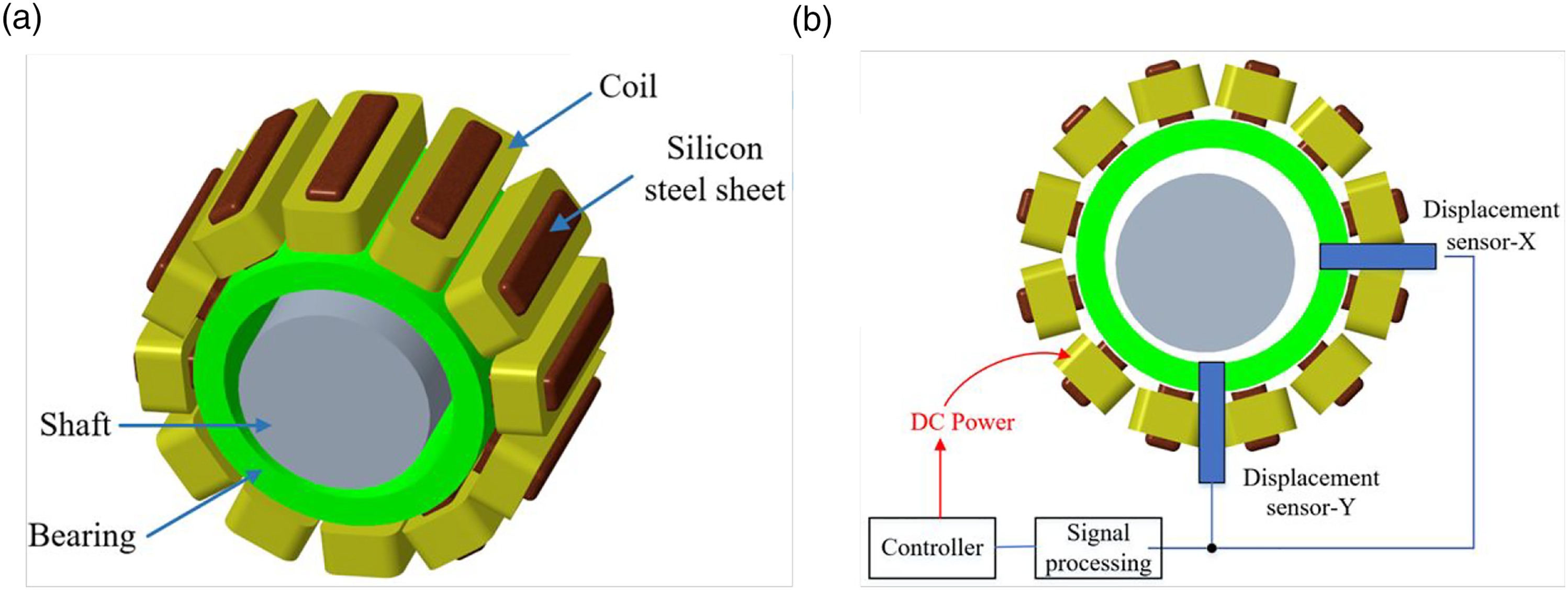

Figure 2(b) presents an overview of the bearing control system. When shaft is driven by motor at 
Hydrodynamic force of bearing lubricated with MRF
Hydrodynamic force equation
The differential equation for governing the flow of fluid in the hydrodynamic bearing is expressed as
By solving the above formula, we can obtain the pressure distribution p. Loading capacity that is exceedingly important parameter of oil film bearing is obtained. The hydrodynamic forces are as follows


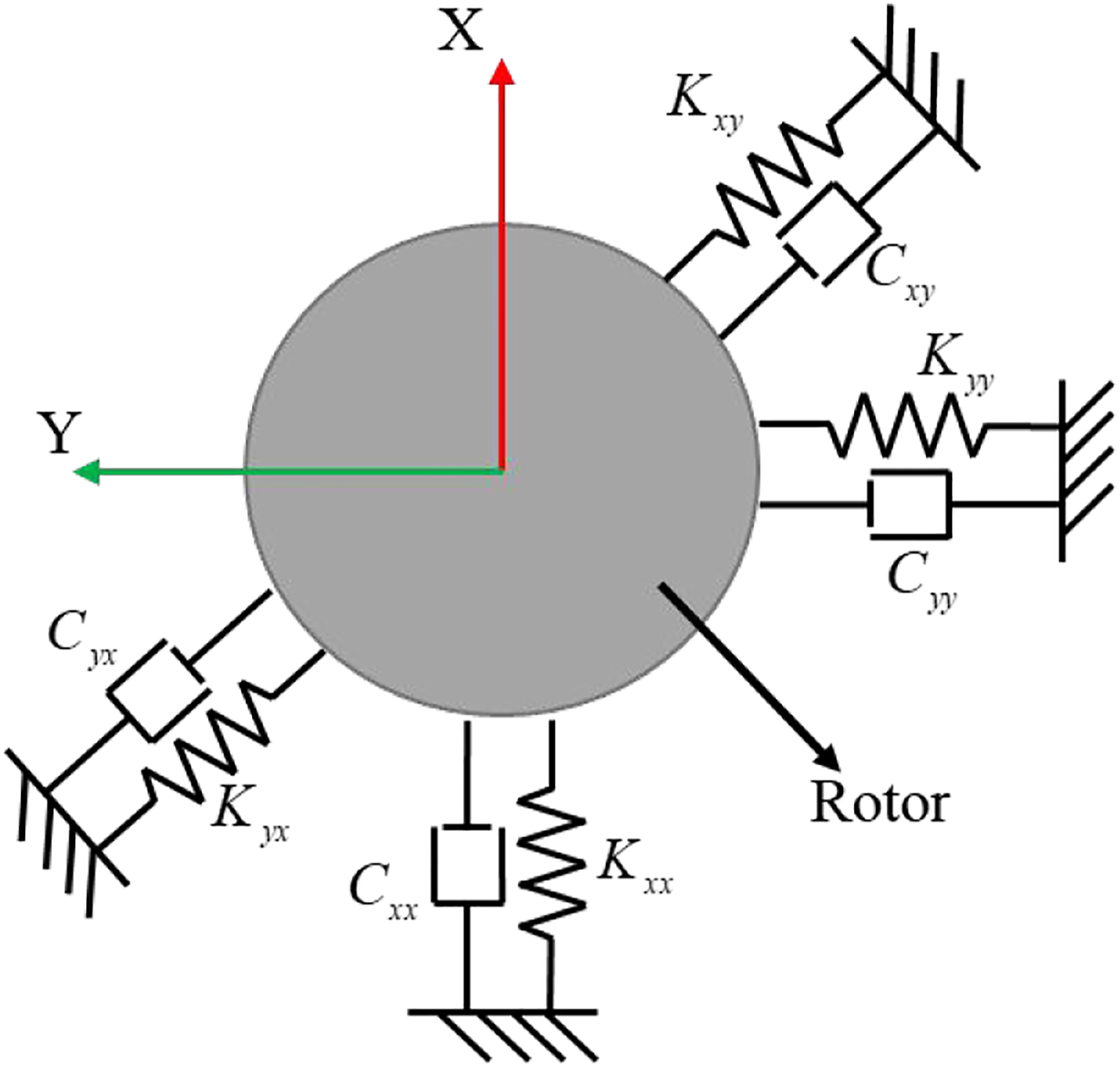
Similarly, for the dynamic performance of the bearing, Figure 3 is two direct and two cross-coupled, that is, 2 The bearing stiffness and damping coefficients.

Constitute equation for MRF
In this work, the viscosity of MRF can be approximated with the Bingham law for yield stress
As provided by Lord Corp., the B-H and shear yield stress relationships for the MRF used (MRF-132DG) can be found in.Ref [44] Through curve fitting, the magnetic field strength H can be described accurately in terms of the magnetic induction intensity B (T) of this material by the following cubic
To relate the magnetic field strength to the yield behavior of the material, the shear yield stress 
Both sides of equation (8) are divided by the shear rate 
As a result, the different viscosity under various magnetic fields can be obtained easily to simulate the MRF effect in bearing lubrication.
Mathematical model of MRF bearing-rotor system
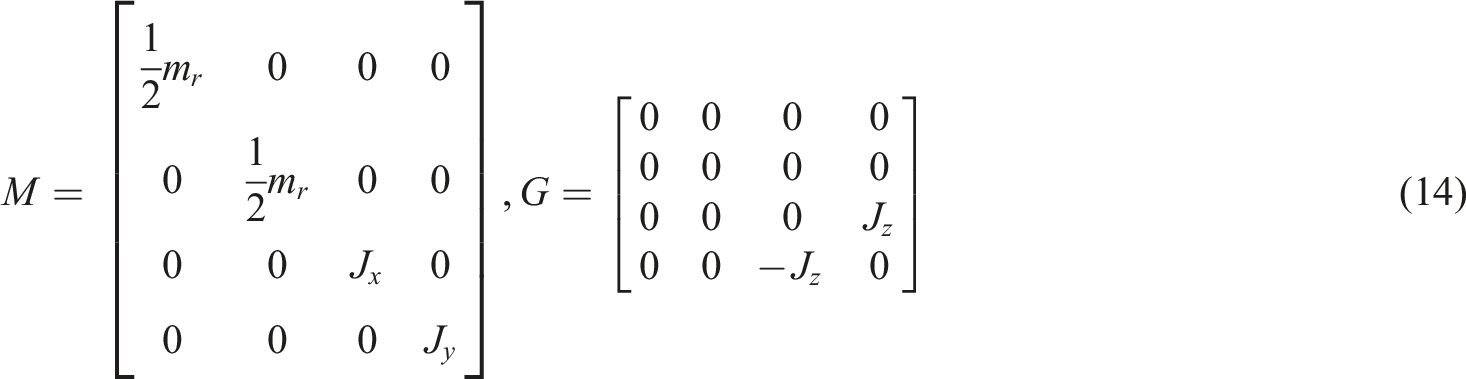
In this work, since the rotor speed is far lower than the bending critical speed, it can be modeled as a rigid body. As shown in Figure 4, this system consists of a shaft, two bearings and a disk, which is in the middle of two bearings. The gap between rotor and bearing is filled with MR fluid. Since hydrodynamic bearing is modeled as stiffness and damping coefficients matrices, the equations are as follows Schematic view of rotor-bearing system.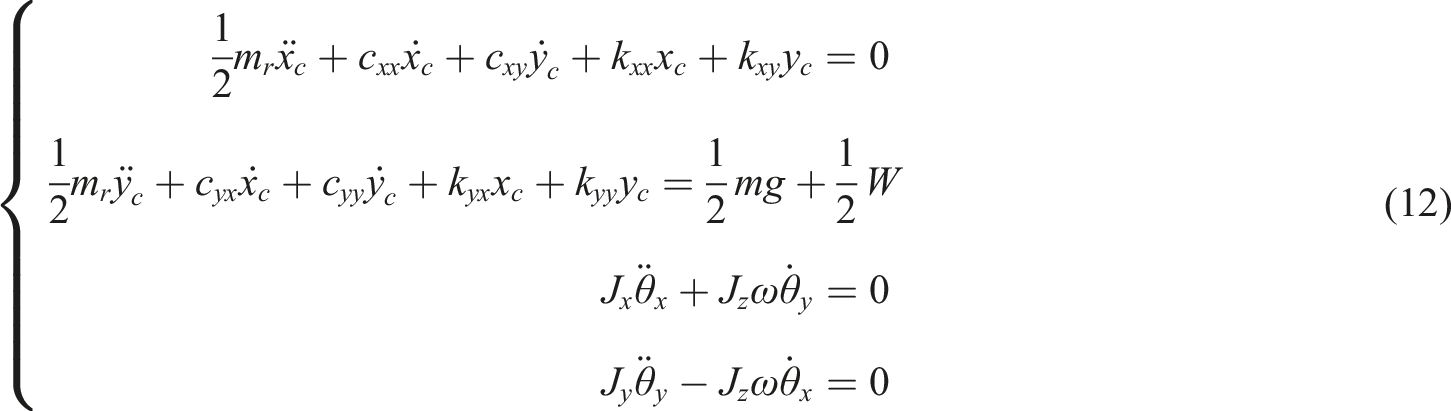
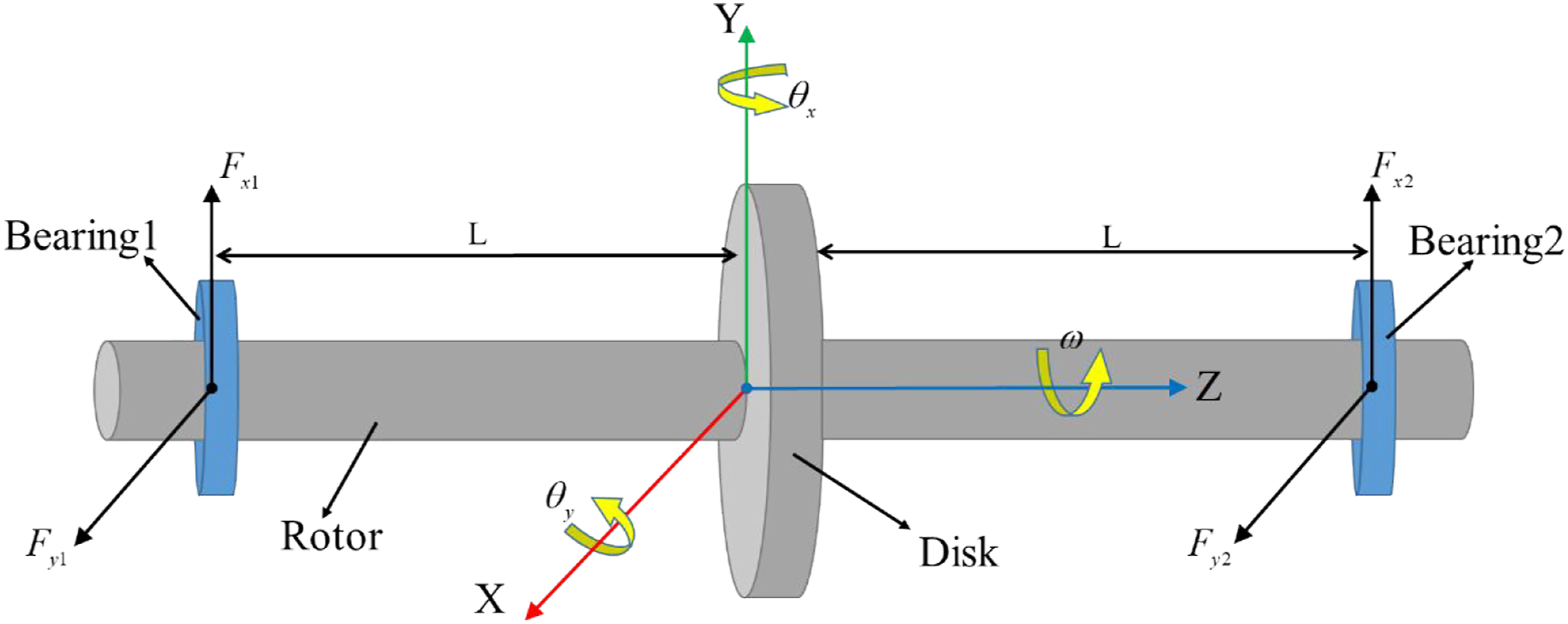
Furthermore, since the two bearings are symmetrical about the center of mass, two equations can be obtained: Fx1 = Fx2, Fy1 = Fy2. Equation (11) is also written as

Moreover, x1, x2, y1, and y2 are defined as the displacement of the rotor at the left and right bearing lubricated with MRF. Currently, q
c
and displacement of rotor have the following transformation relationship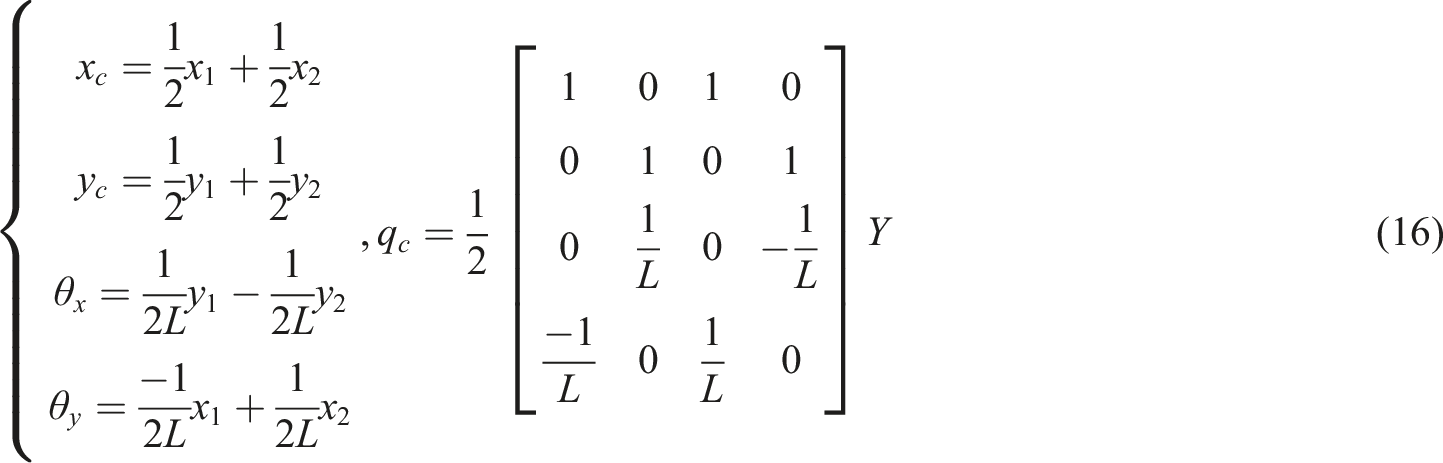

The bearing-rotor system state space equation can be written as
Finite element model simulation
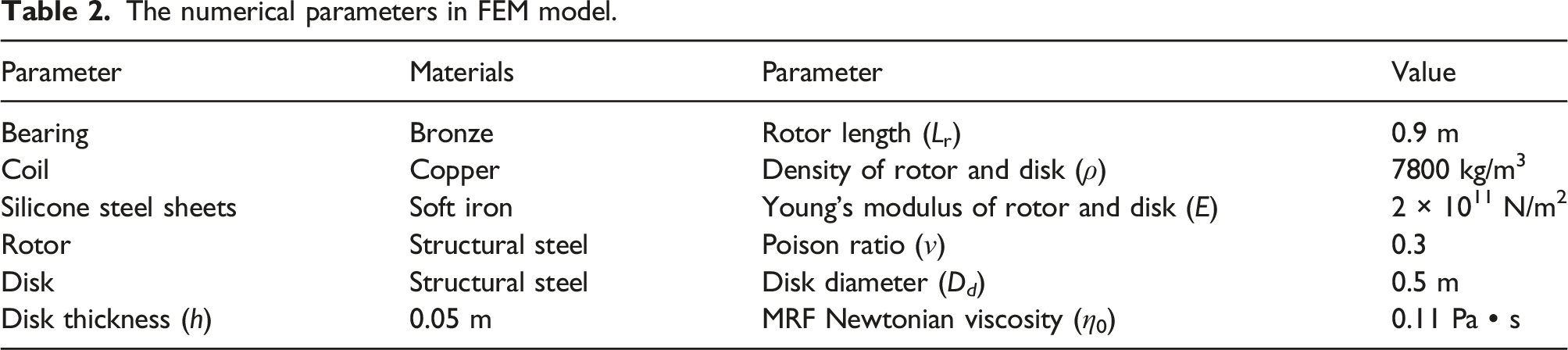
As for the considerations that it went into the design and analysis of the active MRF bearing-rotor system, a 3D model was developed in the FEM software COMSOL Multiphysics version 6.0. In this simulation, four physical field modules were used, which are magnetic field, hydrodynamic bearing, beam rotor and multi-physics, respectively. Figure 5 is 3D model of bearing-rotor system in this FEM software. Induced magnetic field is generated by coil, which has influence on MRF in the hydrodynamic bearing. Moreover, the coupling of hydrodynamic bearing and magnetic field was solved through stationary study, where coil geometry analysis was indispensable. The Multiphysics included hydrodynamic bearing and beam rotor, which was solved through time dependent. Besides, beam rotor module simplified the rotor and disk model by the data setting. The numerical parameters, needed to model the bearing-rotor system, are detailed in Table 2. 3D FEM model of rotor-bearing system. The numerical parameters in FEM model.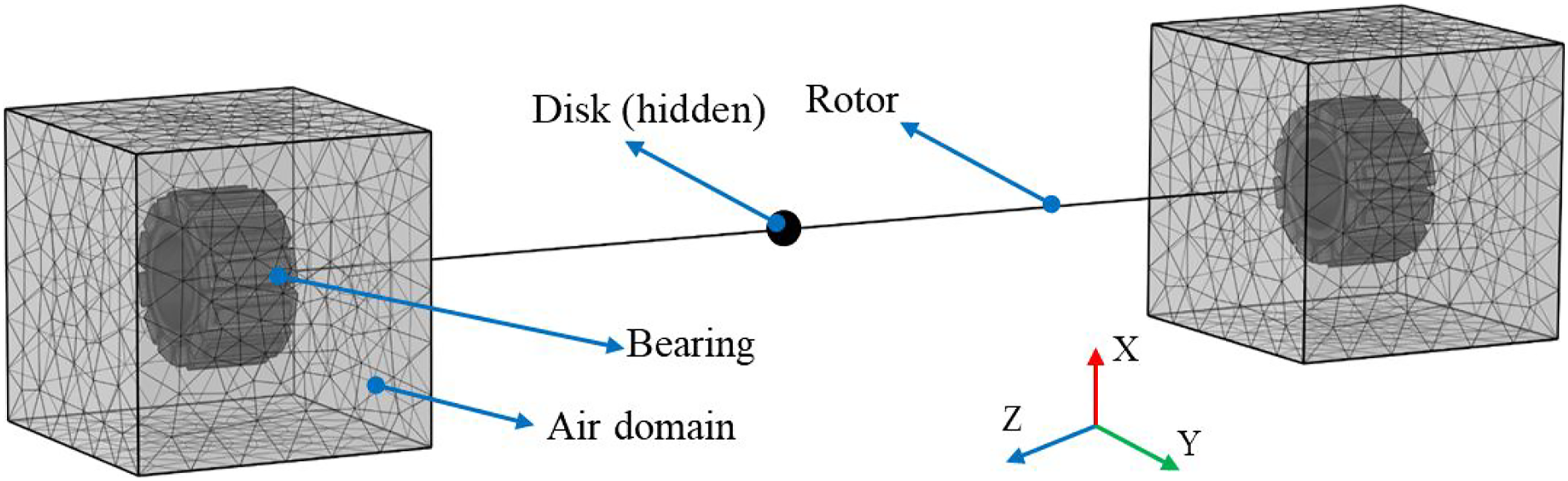
Transfer functions of bearing-rotor system
In this work, we utilized Y-axis displacement of rotor as output. The transfer functions of this complex system integrated machinery, electric, fluid drive and control engineering are composed of two parts: one is current transformed into hydrodynamic force, and the other is the influence of hydrodynamic force on mechanical system. The complete control system is shown in Figure 11.
Specifically, the current (I) and hydrodynamic force (F) response data of the COMSOL Multiphysics were imported to system identification toolbox in MATLAB, and parameters such as sampling time and identification model structure were set to identify mathematical model of this system. Based on the best fit of 95.18% from excitation current to hydrodynamic force, the transfer function could be expressed as follows
On the other hand, the relationship between the hydrodynamic force (F) and rotor Y-axis displacement (Y) was derived from mathematical model of MRF bearing-rotor system. The specific transfer function was derived as
PID controller of the active MRF bearing
Improved Gray Wolf (IGWO) optimization algorithm
The GWO is one of intelligent algorithms, which is motivated by hunting behavior and social ladder of gray wolves.
48
The overview of original GWO is provided below, followed by the improved method. (1) Social hierarchy
The GWO algorithm defines four types of gray wolves: Alpha (α), Beta (β), Delta (δ), and Omega (ω). Alpha is the most suitable wolf, followed by Beta and Delta. Other wolves are not less important and conducted as Omega class. (2) Encircling prey
The prey is surrounded by gray wolves during hunting, which can be expressed mathematically as (3) Hunting



In the hunting stage, the best positions of Alpha wolves, Beta wolves and Delta wolves are used to find the best positions of wolves. The next location where wolves surround their prey is (4) Attacking prey


When the prey stops moving, the gray wolf finishes the hunting process by attacking. In order to simulate approaching prey, when the value of a decreases linearly from 2 to 0, its corresponding (5) Searching the prey
When the value of
In this research, the convergence coefficient vectors a is evaluated by a nonlinear adjustment instead of linear change, which can increase local optimization ability in the middle and later stage of the algorithm. On the other hand, inspired by the particle swarm optimization algorithm, the individual can learn from the global optimal location and the historical optimal location at the same time. Based on this, a new improved location update rule is proposed. When inertia weight w is high, the global optimization ability of the algorithm is significantly reduced, but the local search is increased. When the inertia weight w is small, the global optimization ability is increased, while the local optimization is reduced. The specific position update methods are as follows


The IGWO can better balance the global and local optimizations and has better ability to jump out of local optimization. The flowchart of proposed IGWO algorithm is provided in Figure 6. The flowchart of improved gray wolf optimization (IGWO) algorithm.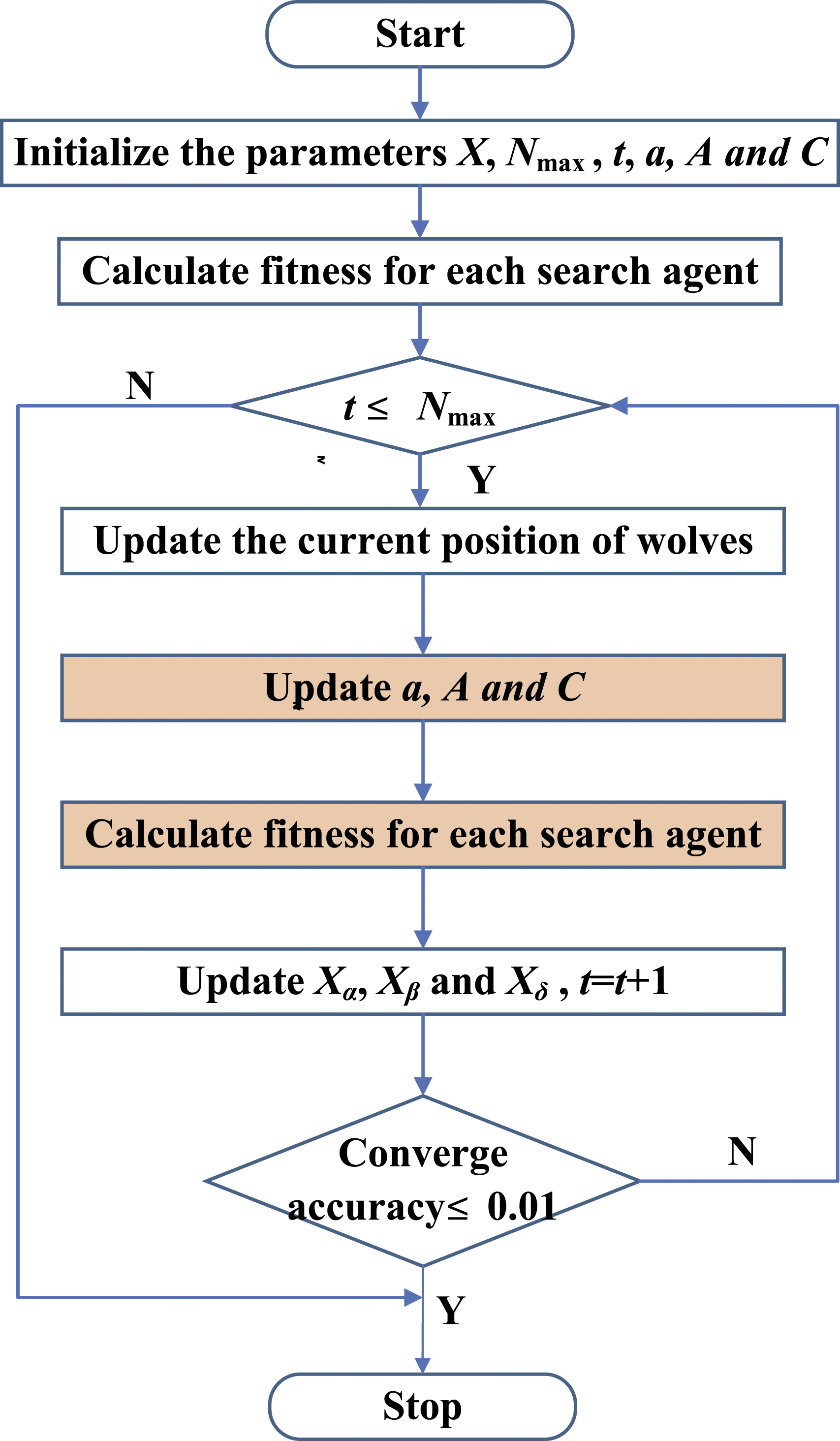
Feasibility verification of the IGWO algorithm
The best optimal values of test functions.

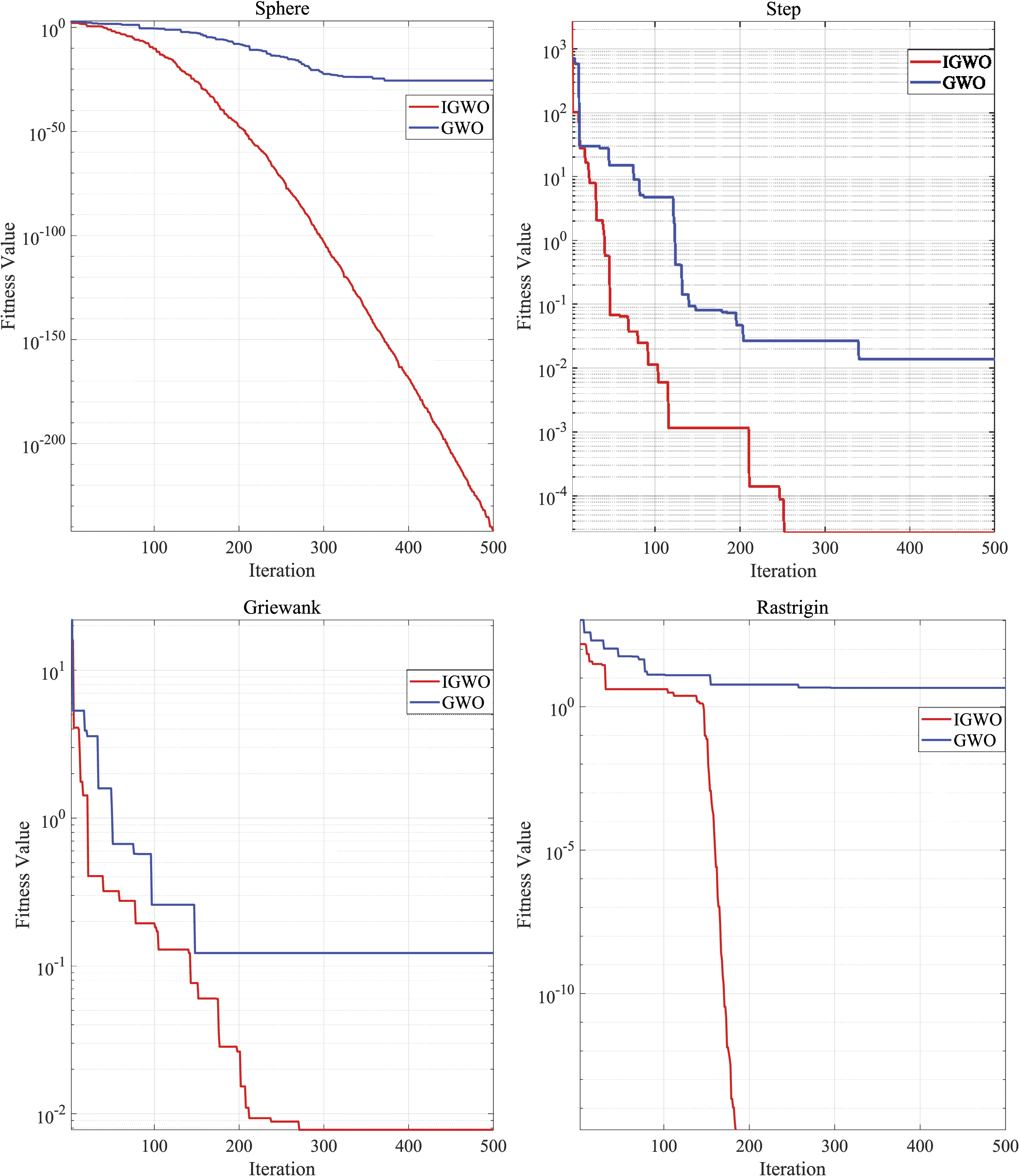
Comparison of fitness convergence curve.
From Table 3 and Figure 7, IGWO algorithm has obvious advantages in convergence accuracy and the smaller optimal value compared with GWO. Therefore, it is proved that IGWO in this work effectively enhances the optimal value of original GWO with satisfactory convergence rate.
Simulation results
The validation of FEM model
In order to verify the present FEM model, experimental results presented in
24
are used for comparison. Consequently, this work uses the same modeling parameters: D = 50 mm, L = 50 mm, C = 0.1 mm, MRF-122-2ED, rotating speed (n) = 200 r/min. In this article, the bottom two coils are energized by current, and the magnetic field distribution of MR fluid journal bearing is shown in Figure 8. Clearly, the red arrow represents the direction of the magnetic field. Figure 8 shows that the magnetic field of the oil film below becomes stronger, and therefore can provide larger load capacity. The magnetic field distribution of MR fluid journal bearing.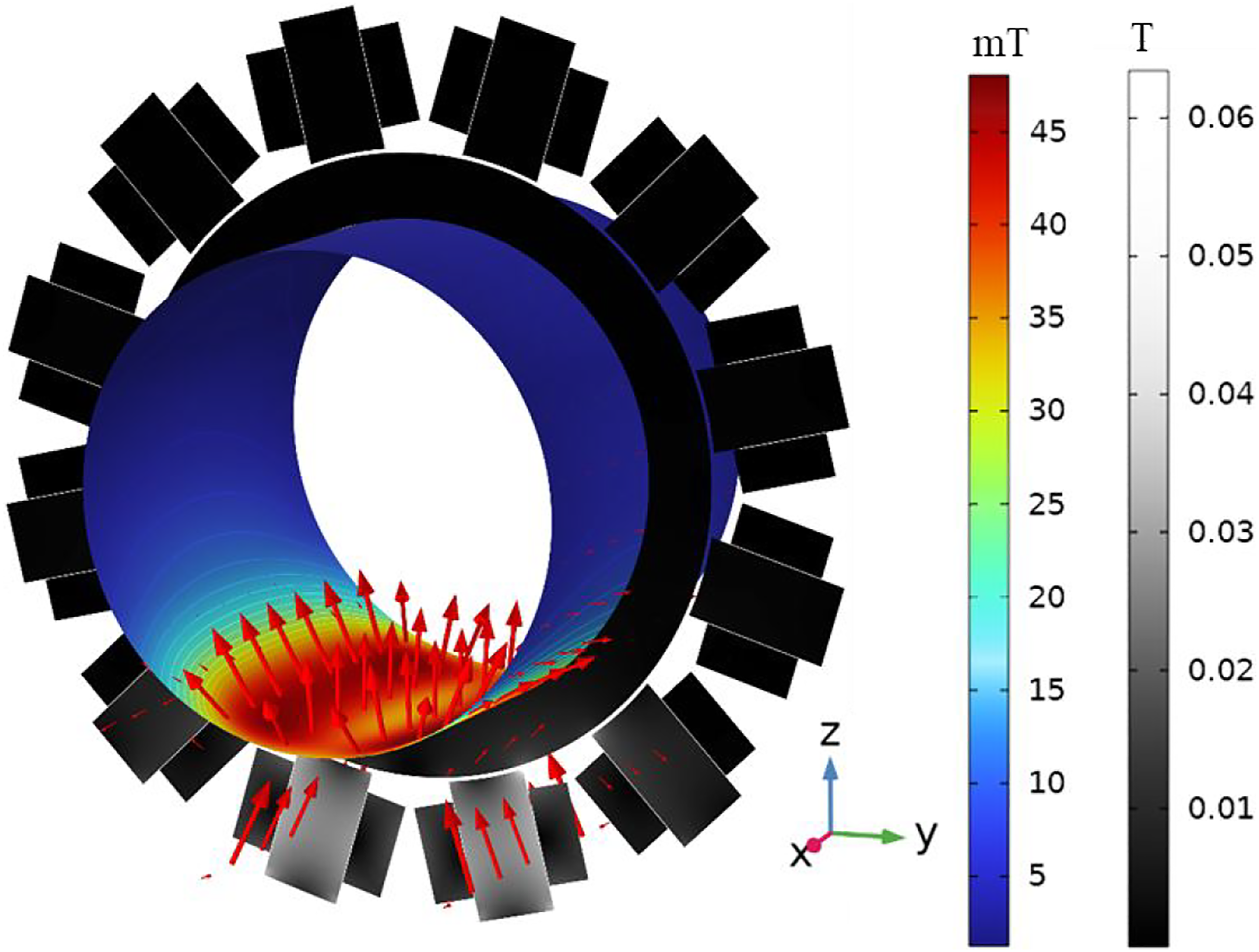
From the Figure 9, the numerical results obtained from the mathematical model in this work match experimental results in Ref [28] in the range of normal operational eccentricities, and hence it could be considered fully validated. The validation of FEM model.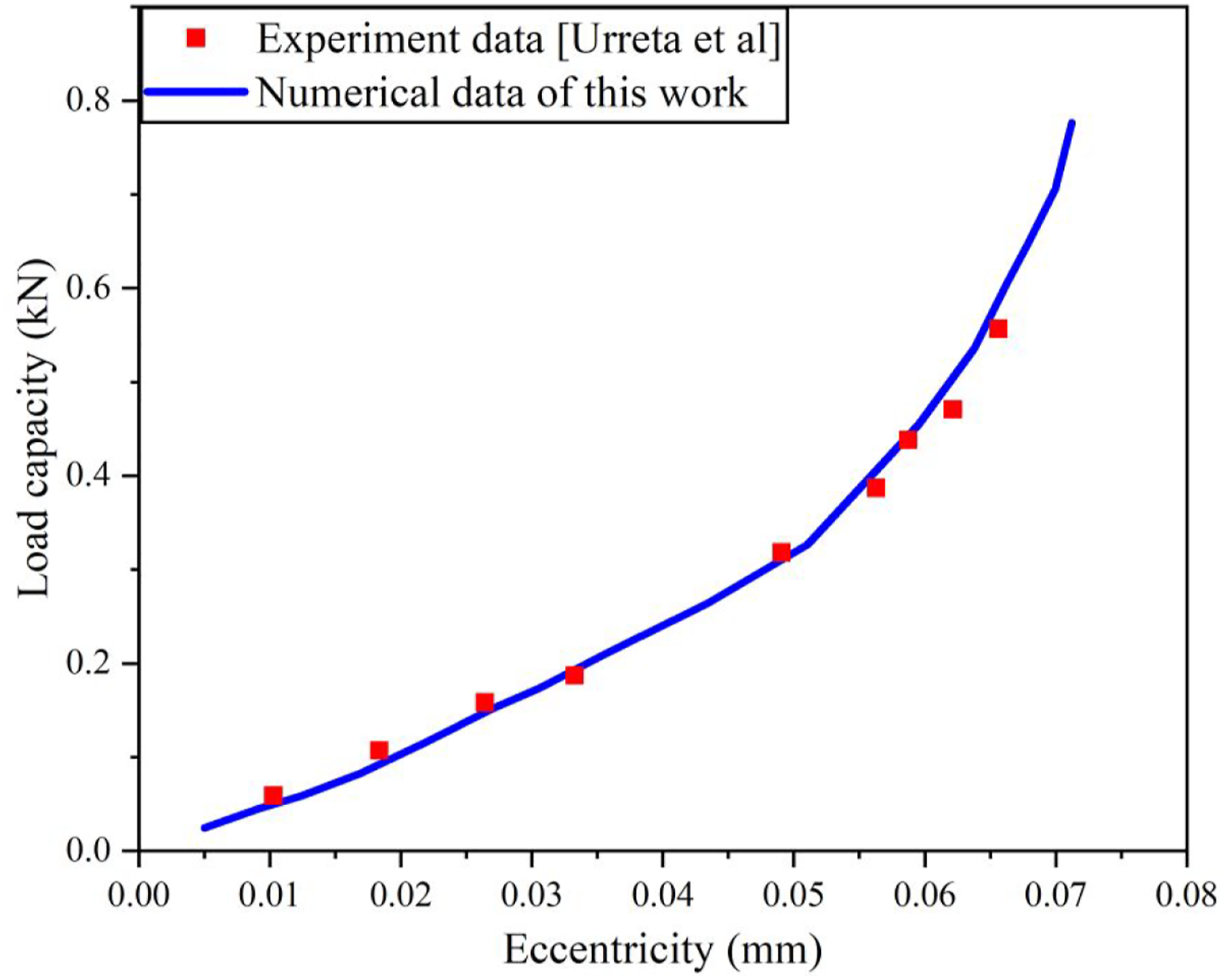
The performance evaluation of MRF bearing-rotor system
The main purpose of designing this MRF bearing is to increase fluid-film bearing load capacity and reduce the displacement of the shaft, and therefore it can suppress rotor vibration and enhance the dynamic response of bearing-rotor system. The simulation of this system is operated in MATLAB/Simulink and set parameters: rotating speed (n) = 200 r/min, load (W) = 1000 N. The different magnetic induction intensities are 0, 25, and 50 mT in the bearing loading region, which are corresponding to different currents of 0, 1, and 2 A, respectively. As shown in Figure 10, when coil system is excited by current, the rotor center orbits are smaller than those without current. It is indicated that the active MRF bearing has larger minimum oil film thickness and it can avoid the direct contact between shaft and bearing and reduce friction. Under the presence of magnetic field, the rotor stops the plane motion and stabilizes at a point in the final moment, and therefore the novel active bearing has ability to suppress rotor vibration, which could bring about oil whirl and whip phenomena. With the increasing of current magnitude, the orbit of shaft center is smaller, and hence it is possibility to further enhance rotating accuracy of shaft to adapt to more complex working conditions. Comparison of the shaft center orbits under different currents.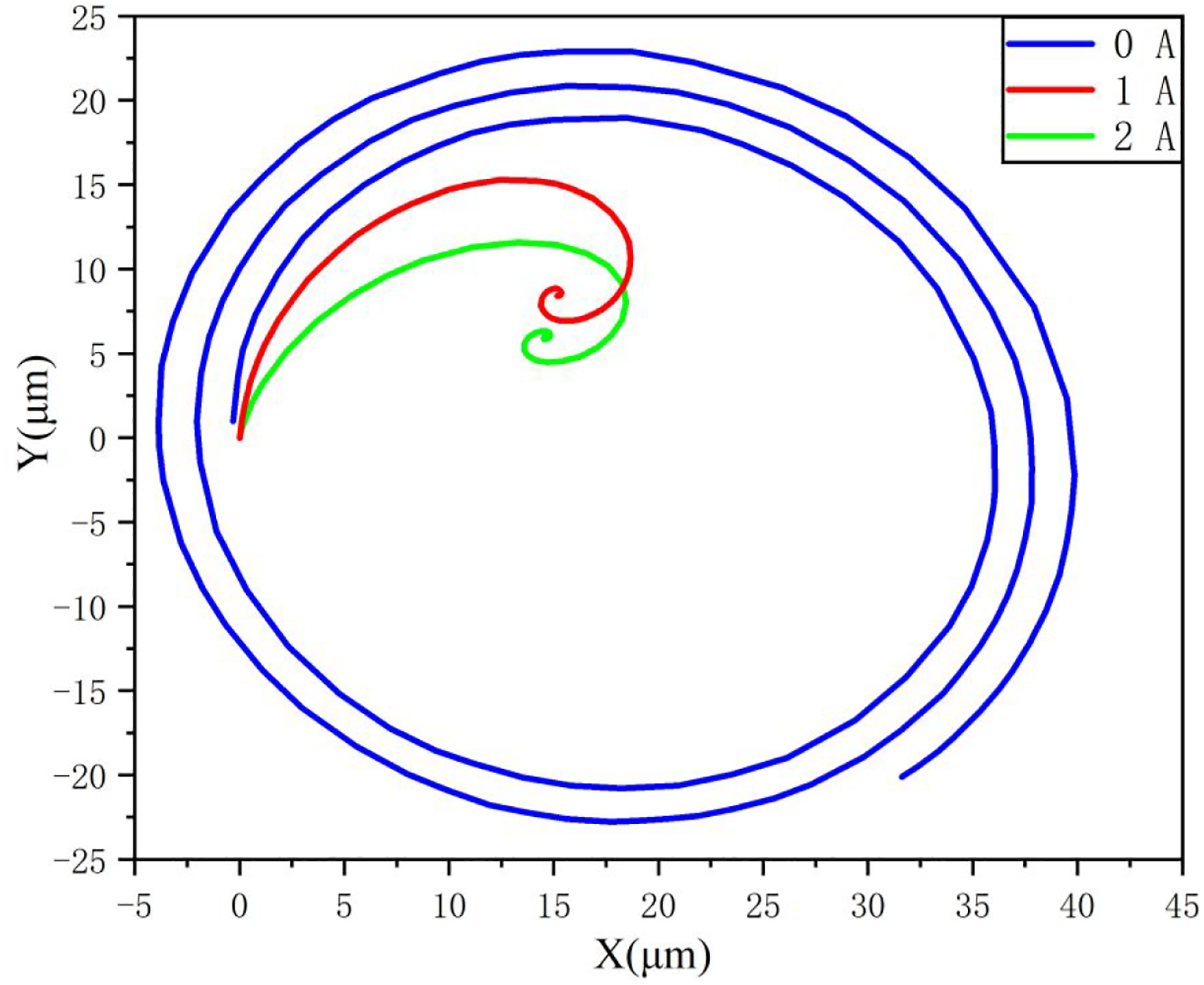
PID parameters optimized by different intelligent algorithms
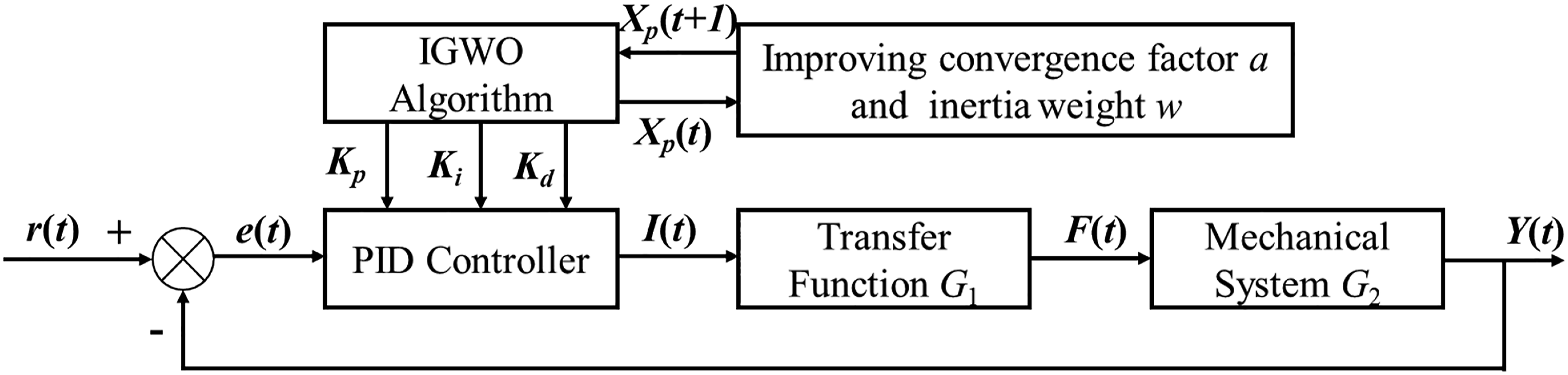
In order to realize the smaller displacement of the shaft, it is fundamental to design an appropriate controller. So, the DC power is controlled by PID controller to produce magnetic field, which affects MRF viscosity. The parameters of PID are optimized by different intelligent algorithms. The principle of PID controller based on IGWO algorithm is shown in Figure 11. The r(t) presents the ideal displacement of rotor and Y(t) represents the actual rotor displacement. To evaluate various performance for the improved controller, the objective function ITAE is selected and expressed as Principle of the PID controller based on IGWO algorithm.
GA-PID, PSO-PID, GWO-PID, and IGWO-PID controllers are used to simulate the response of step signal, which is set as 10 μm in this work and represents the ideal displacement of rotor. The simulation is operated in MATLAB/Simulink. The four intelligent optimization algorithms have the same parameter settings: Nmax = 100, X = 30. The responses of output are shown in Figure 12. The output response of step signals based on different PID controller parameters.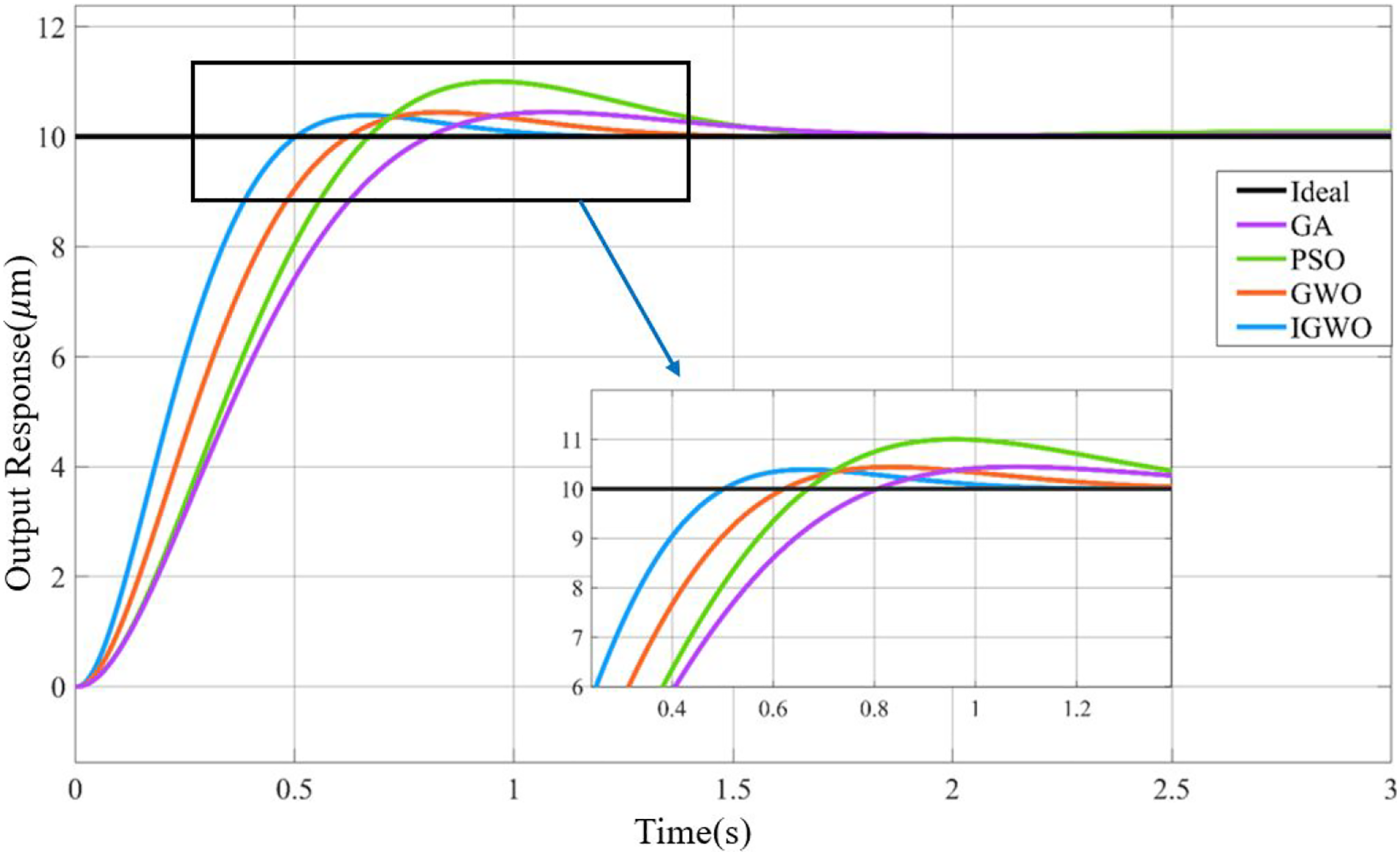
Performance indexes of the output response based on different PID controller parameters.

Conclusions and future works
In this work, MRF as lubrication oil film adds an extra degree of freedom in the bearing than traditional fluid-film bearing. Therefore, a novel active MRF fluid-film bearing is designed and its intelligent lubrication mechanism is analyzed. The IGWO-PID controller is proposed to control this bearing more effectively so as to provide higher load capacity and suppress rotor vibration. Thus, contact and friction between shaft and bearing can be reduced, and their service life could be prolonged extremely. First, mathematical model of MRF bearing-rotor system is derived, and FEM model is utilized to obtain stiffness and damping coefficients to supplement mathematical model. Furthermore, an IGWO algorithm is developed to tune the PID parameters. Lastly, the simulation results show that with the increasing of current magnitude, the orbits of shaft center decrease. Under the action of magnetic field, the shaft of the novel active MRF fluid-film bearing can stabilize at a point in the final moment, and therefore this bearing has ability to suppress rotor vibration, which could bring about oil whirl and whip phenomena. In addition, IGWO-PID controller has better response characteristics than GWO, PSO, and GA algorithms, and hence the IGWO algorithm can find the more appropriate PID controller parameters, that the validity of this algorithm is further proved. The above conclusions are of reference significance for lubrication design, fault diagnosis and life predication of MRF fluid-film bearing.
Future work of this research will carry out physical tests to further verify the excellent load capacity of active MRF bearing under heavier load operating conditions. In addition, IGWO-PID controller may not be suitable since its robustness is insufficient under extremely heavy load conditions. Therefore, more advanced controllers will be used to further reduce displacement of shaft to adapt to various complex conditions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The support of National Natural Science Foundation of China (No. 51975568), Natural Science Foundation of Jiangsu Province (No. BK20191341), Jiangsu Funding Program for Excellent Postdoctoral Talent under Grant 2022ZB519, China Postdoctoral Science Foundation under Grant 2022M723387 and Priority Academic Program Development of Jiangsu Higher Education Institutions (PAPD) in carrying out this research are gratefully acknowledged. The research leading to these results has received funding from the Norwegian Financial Mechanism 2014-2021 under Project Contract No 2020/37/K/ST8/02748.