
Abstract
Effective vibration control of flexible cables is increasingly demanded for space flexible structure. For the low frequency dynamics of flexible cables, a novel vibration control strategy based on sliding mode control is proposed in this paper. First, the complex dynamical behavior of flexible cables is modeled using D’Alembert’s principle. Second, an improved dual power reaching law is put forward to better address the chattering problem of the sliding mode controller. Then, an extended state observer (ESO) with the radial basis function (RBF) neural network is designed to compensate for internal uncertainties and external disturbances as well as further improve the control accuracy. Lyapunov function is employed to analyze the stability of the system. Finally, considering the large number of parameters of the proposed controller, an improved particle swarm optimization (PSO) algorithm is designed to automatically adjust these parameters. The effectiveness of the proposed method is demonstrated by simulation results.
Keywords
Introduction
With the development of space technology, space missions are becoming increasingly complex. A series of new flexible cable spacecraft have thus emerged, such as cable net antenna, 1 tethered satellite, 2 tethered space robot3,4 as well as space acquisition system, 5 which have wide application prospects in space missions owing to their light weight, low damping, and high tensile strength.
Nevertheless, flexible cable induced by various disturbance during flexible spacecraft in orbit service including cold and heat alternation, temperature impact, solar winds, and so on will lead to low frequency vibration in the implementation of space deployment, target acquisition, and other tasks, 6 which severely degrades the performance of spacecraft and even damages its own structure.
To address this challenge, previous research usually employed the passive control approaches to suppress the vibration of flexible cables by installing dampers at the bottom of the flexible cables. However, the vibration suppression effect of damper for long flexible cable is poor, and the adaptability of this method to external interference is insufficient. 7 Active control can overcome the defects of the passive methods, better response to the impact of uncertain disturbances. 8
The active control of flexible cable can be divided into modal control and wave control. 9 Wave control refers to applying transverse force directly to the flexible cable to suppress the propagation of vibration waves, but this method will derive damage to the control part. 10 Therefore, scholars pay more attention to the study of modal control. Modal control that takes the displacement of a certain observation point of the flexible cable as the feedback suppresses the low frequency vibration of the cable through the output force of the axial actuator. Fujino’s experimental study showed that when the actuator is placed in the axial position of the cable and its working frequency is more than twice of the natural frequency of the flexible cable, the vibration amplitude of the flexible cable is significantly reduced. 11 Peng et al. proved that the optimal control can effectively reduce the vibration amplitude of the flexible cable by selecting the appropriate feedback gain. 12 Based on linear quadratic regulator (LQR) theory, Jin et al. conducted simulation analysis on vibration control of flexible cable and verified the effectiveness of active LQR control. 13 Krarup et al. adopted the pole distribution control method to design an active controller, the simulation results indicated that this method can suppress the low frequency vibration of flexible cable to a certain extent. 14 Li et al. adopted linear quadratic Gaussian controller (LQG) with self-powered capability to obtain the optimal active control force and demonstrated its effectiveness through simulation. 15 To sum up, most of the vibration control methods of flexible cable are optimal controllers and their improvements, which still have limited vibration suppression effect in the space environment with high uncertainty. Therefore, an improved sliding mode controller (SMC) is employed to restrain the low frequency vibration of flexible cable in this paper.
SMC have been widely used in robotics, 16 power electronics, 17 mechanical structure vibration suppression, 18 aerospace, 19 and many other fields because of its simple design, fast response speed, strong robustness, and so on. However, sliding mode controller needs to change the system structure through switching control variables, which will inevitably lead to the problem of chattering. 20 Chattering imposes an obstacle to control accuracy and stability of the system. 21 The realization of effectively reducing chattering is still a challenging task. In Goa et al.’s work, 22 three types of reaching laws of sliding mode control have been suggested, namely, constant velocity approach law, exponential approach law, and power reaching law. However, due to slower approaching velocity and larger chattering, the constant velocity approach law is generally not used in practical engineering. Exponential approaching law is to add an exponential term on the basis of constant velocity approaching law. Although the approaching speed is fast, the chattering of the system is large when approaching the sliding mode surface. Compared with these methods, the power reaching law uses the power term technology to slow down the approaching speed when the system approaches the sliding mode surface, which is conducive to weakening the chattering. But the disadvantage of this method is that it takes too long time to reach the sliding mode surface. A fast double power reaching law is proposed by Yu et al., 23 which effectively overcomes the disadvantage of long arrival time of power reaching law.
In Sami et al.’s work, 24 the boundary layer method that uses continuous function instead of sign function is employed to suppress chattering, but this method will reduce the control accuracy. High-order sliding mode control can effectively avoid chattering, but it is difficult to apply to low order systems. The high-order derivatives of sliding mode variables are also difficult to obtain.25,26 Futhermore, disturbance observer is introduced to realize feedforward compensation disturbance and system uncertainty, so as to weaken chattering. In the traditional sliding mode control without observer structure, the upper bound of the uncertainties and disturbances terms of the system cannot be measured, so it is essential to set a large gain to ensure the stability of the controller that will lead to large chattering. 27 The disturbances are compensated by the observer results, which greatly reduce the requirement for the gain of the switching term of the controller. 28 An alternative way to remove chattering significantly is to use intelligent control approaches like fuzzy logic and neural network control.29,30 The work of Fang et al. 31 combines the fuzzy control method to automatically adjust the gain of sliding mode control so that the amplitude of the chattering can be reduced.
In this study, an improved sliding mode controller is put forward to suppress low frequency vibration of the flexible cable. The major points of this paper’s contributions are listed below. 1) A novel dual power convergence law is put forward to better address the chattering problem of the sliding mode controller. 2) An extended state observer (ESO) with the radial basis function (RBF) neural network is designed to effectively compensate for internal uncertainties and external disturbances. 3) An improved PSO algorithm is utilized to adjust the parameters of controller to obtain optimal results. 4) The simulation results demonstrate the superiority of the proposed sliding mode controller for suppressing the low frequency vibration of the flexible cable.
The paper outline is as follows: In the Modeling of the flexible cable section, the dynamic model of the flexible cable is generated first by D’Alembert principle. Then, in the Proposed sliding mode control method section, an improved double power reaching law is designed, on that foundation, the internal uncertainties, and external disturbances of the system are compensated by ESO with the RBF neural network, and an improved particle swarm optimization algorithm is employed to optimize the parameters of the controller. Subsequently, in Simulation results and analysis section, to demonstrate the effectiveness of the designed sliding mode controller, the numerical simulation has been given.
Modeling of the flexible cable
The flexible cable system of this work has been illustrated in Figure 1. The displacement of the flexible cable observation point is measured by the sensor and input to the controller as feedback. On this basis, the controller drives the actuator placed at the bottom of the flexible cable to output the axial control force, which is employed to suppress the vibration of the flexible cable. Schematic diagram of flexible cable system.
To simplify the study, the following basic assumptions are given. 1. Only the stretching stiffness of the flexible cable is considered, while the bending stiffness, torsional stiffness and shear stiffness of it are excluded. 2. The flexible cable deformation obeys Hooke’s law and the force at each point is uniform. 3. Under the action of uniformly distributed external load, the flexible cable element vibrates slightly near the static equilibrium position.
On the basis of these assumptions, the dynamic balance equation can be given as follows:

Since the flexible cable element vibrates slightly near the static equilibrium position, equation (2) can be obtained as

According to equation (2), the dynamic balance equation in equation (1) can be rewritten as

Considering the action of active control force u(t), equation (3) can be expressed as

On the basis of the separation-of-variables method, the vibration displacement of flexible cable can be denoted as


Multiply both sides of the equation by φ
k
(x) and integrate, equation (7) can be given as

According to the boundary conditions fixed at both ends and regularization conditions, the following equation can be derived as

Then, φ
k
(x) can be derived as

Thus, the kth order modal motion equation of vibration of flexible cable is derived as

After adding the corresponding modal damping term, the damped modal motion equation is obtained as follows:


Besides,



Assuming that the first m modes are controlled, it is written as a state space equation, which can be expressed as



Subsequently, the displacement dynamic equation at the observation point can be modeled as

Taking the actuator as a spring–damping system, the mechanical dynamics of the actuator is modeled as

Proposed sliding mode control method
Double power reaching law
Three types of reaching laws of sliding mode control suggested by Gao et al. 22 are as follows:
Constant velocity approach law is shown as

Exponential approach law is shown as

Power reaching law is shown as

Besides, a fast double power reaching law is given as
23

In this paper, an improved double power reaching law combined fal function and hyperbolic function is proposed as


Set γ = 0.2, a = 1 + γ, the comparison of fal function, hyperbolic tangent function, and symbolic function is shown in Figure 2. In the double power reaching law, when Comparison of three types of functions.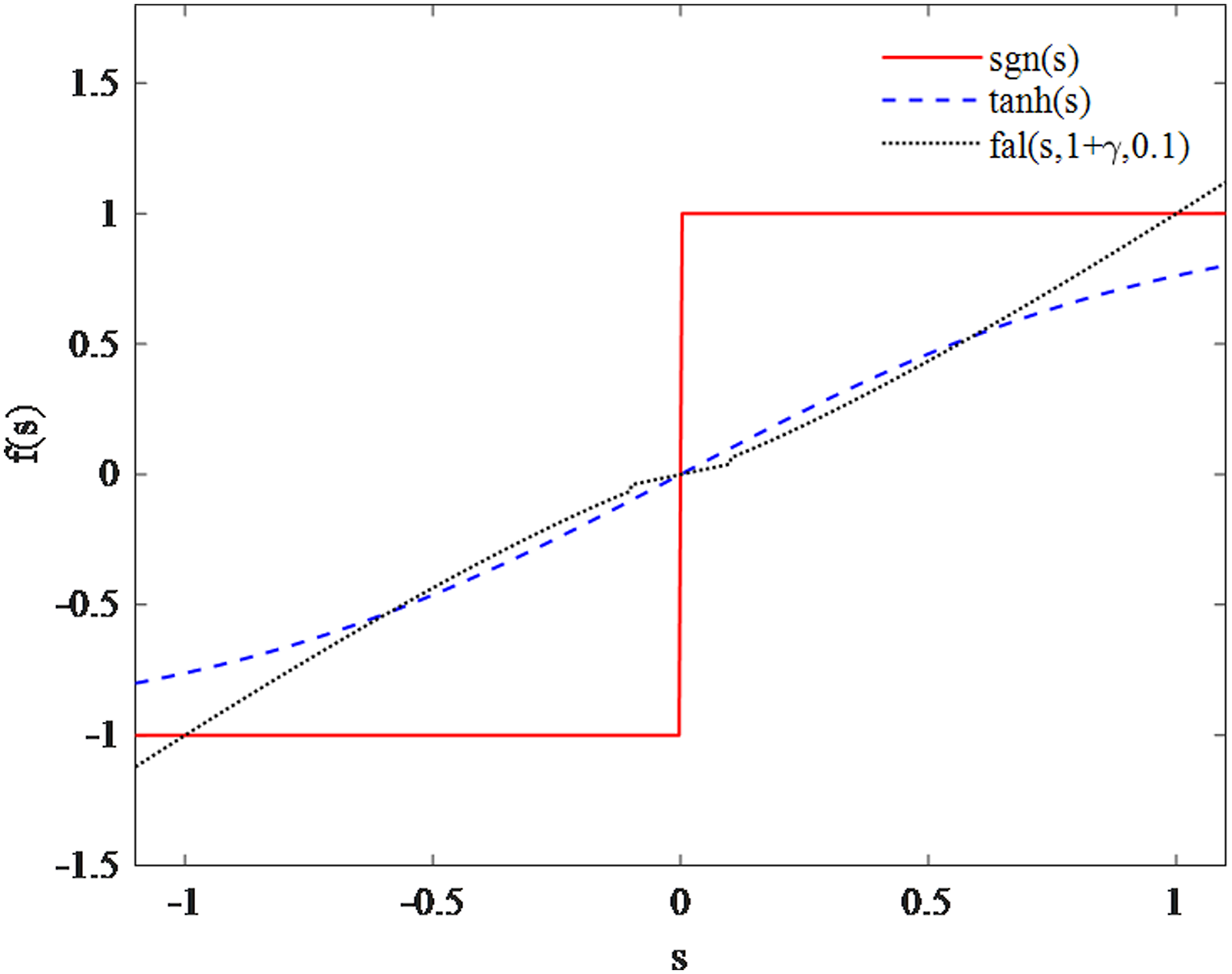
The sliding mode function is designed as, which is illustrated in Figure 3. Sliding mode surface.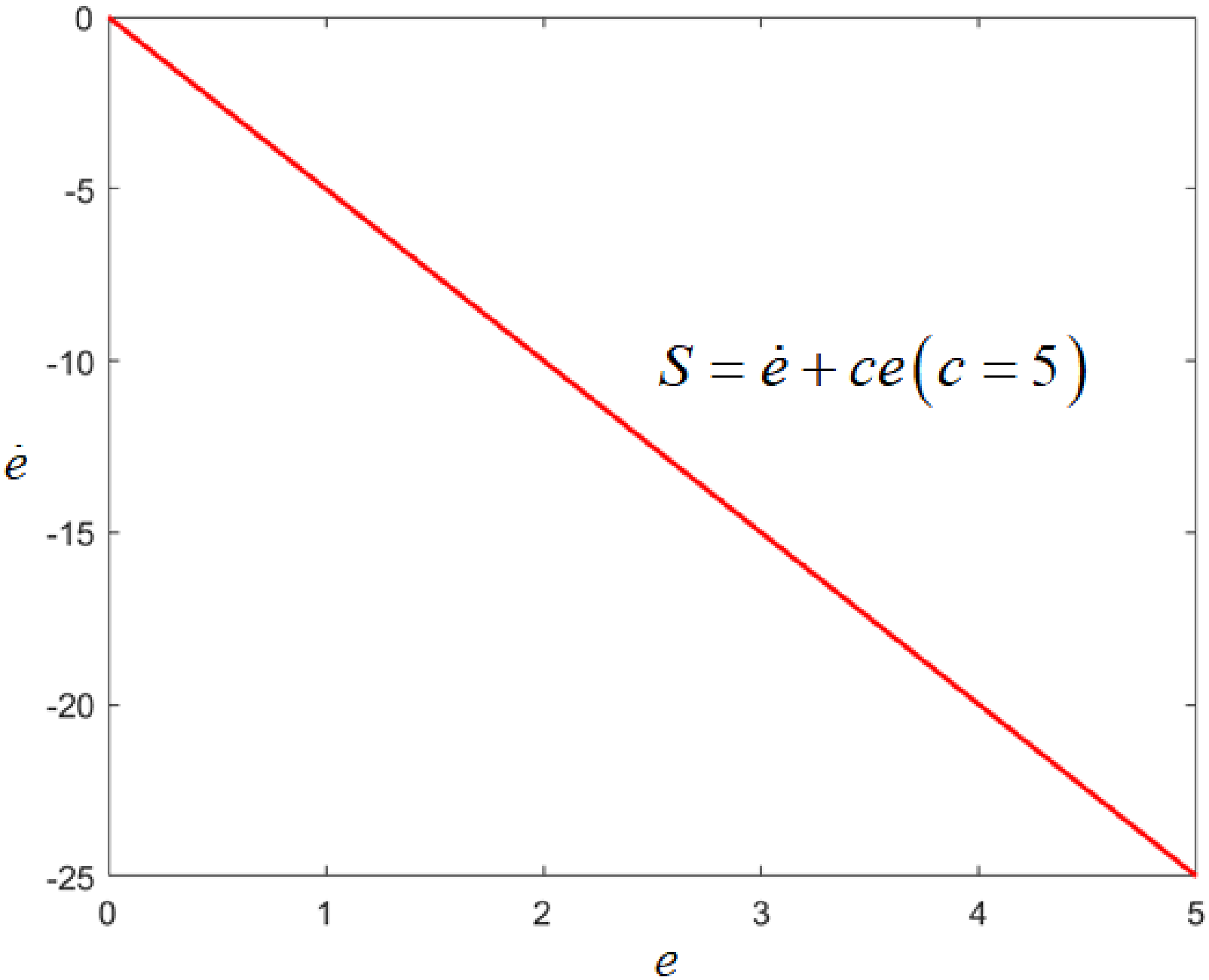

The Lyapunov function is selected as

In Eq. (22), e can be defined as


The derivative of equation (22) can be obtained as

From equation (26), one can obtain as Structure diagram of SMC.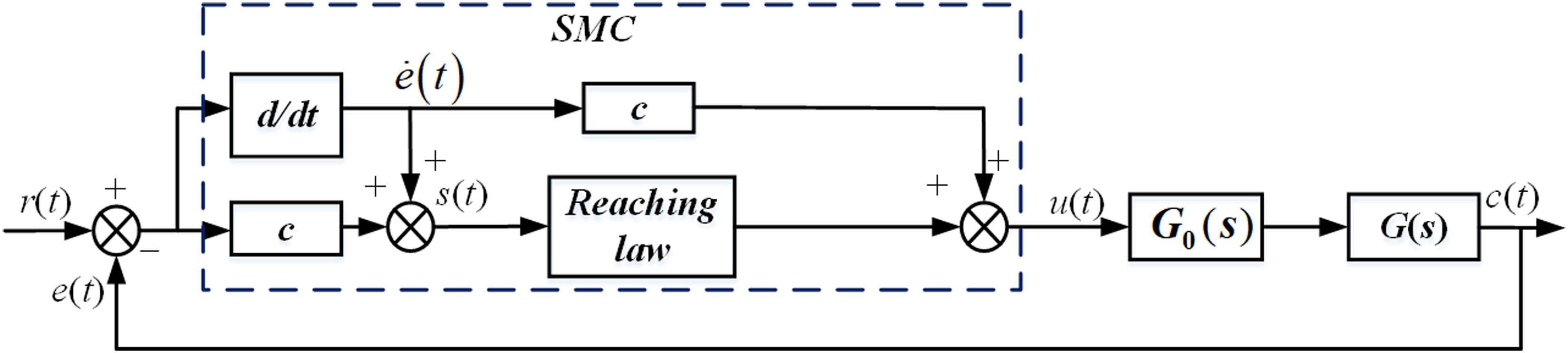

ESO with the radial basis function RBF neural network
ESO is the essence of active disturbance rejection control (ADRC), which can effectively estimate external disturbances of the system. The equation of ESO can be described as

However, the established flexible cable model has both external disturbances d and internal uncertainties g. The conventional ESO is only able to estimate the former, without being able to cope with the latter. To compensate for internal uncertainties and external disturbances as well as further improve the control accuracy, an extended state observer (ESO) with the radial basis function (RBF) neural network is designed in this work.
RBF neural network, proposed in the 1980s, is a three-layer feedforward network with a single hidden layer; its structure is shown in Figure 5. It has been proved that such neural networks can approach any continuous Function with certain accuracy.
32
Compared to BP neural network, RBF neural network has a faster learning speed and no local minimum problem, which is more suitable for control systems with high real-time requirements, and can effectively improve the precision and robustness of the control system. In this paper, RBF neural network is used to realize approximation of uncertain g in sliding mode controller. Structure diagram of RBF neural network.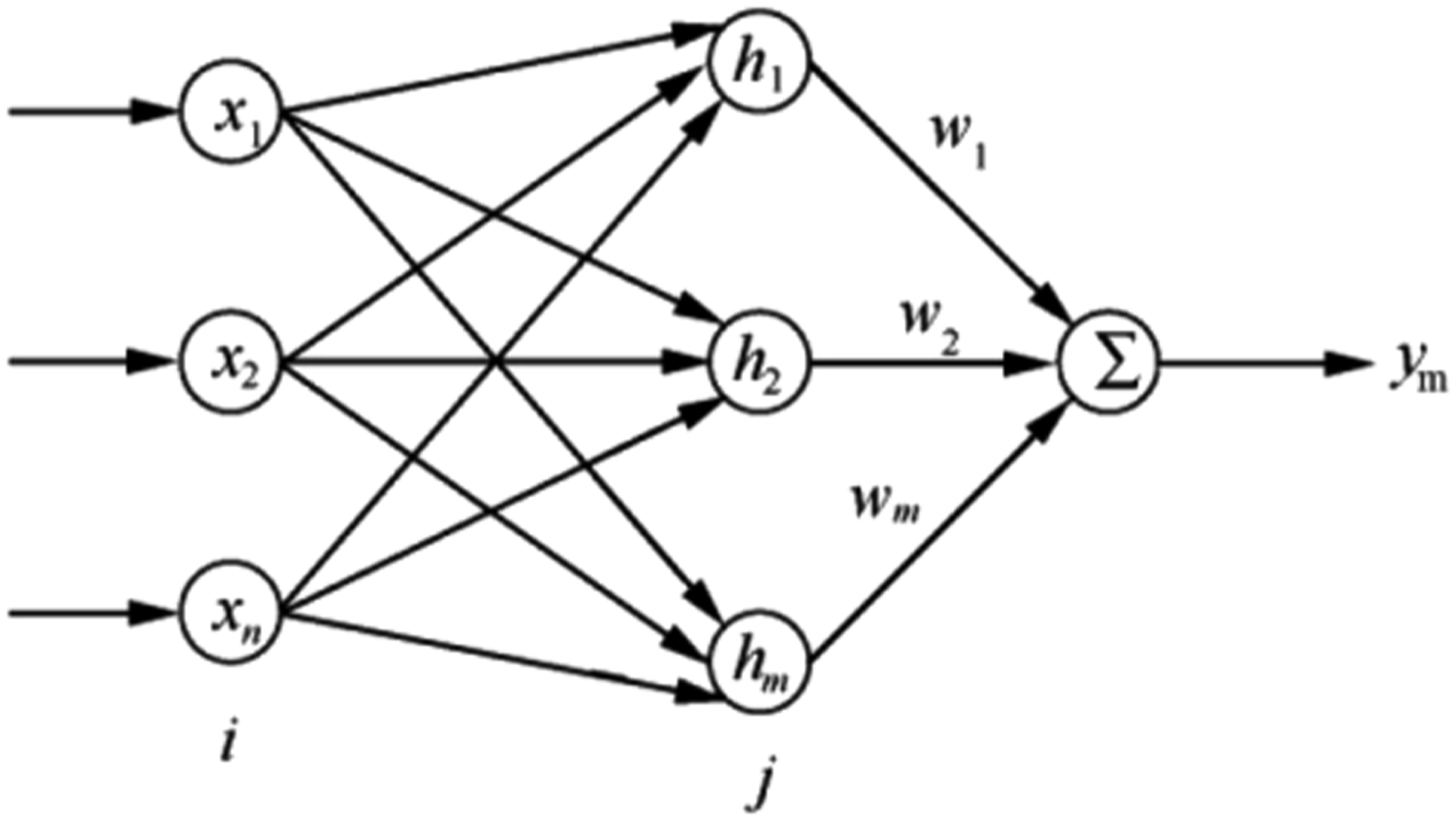
The output of RBF neural network can be written as

Set the weight of neural network as follows:

The output of RBF neural network is as follows:

And the training error index of neural network is as follows:

According to the gradient descent method, the weight adjustment method of RBF neural network is given as

Besides, to extract the differential signal more accurately, the tracking differentiator in ADRC is employed to replace the function in MATLAB. The formula of tracking differentiator can be expressed as



Stability analysis
The output of network in this paper can be given as



Thus, the control output can be derived as

The derivative of equation (22) can be obtained as


The adaptive law is designed as follows:

The Lyapunov function is selected as

The derivative of equation (45) can be obtained as
By setting large gain values α and β to make Structure diagram of RBF neural network sliding mode controller with ESO.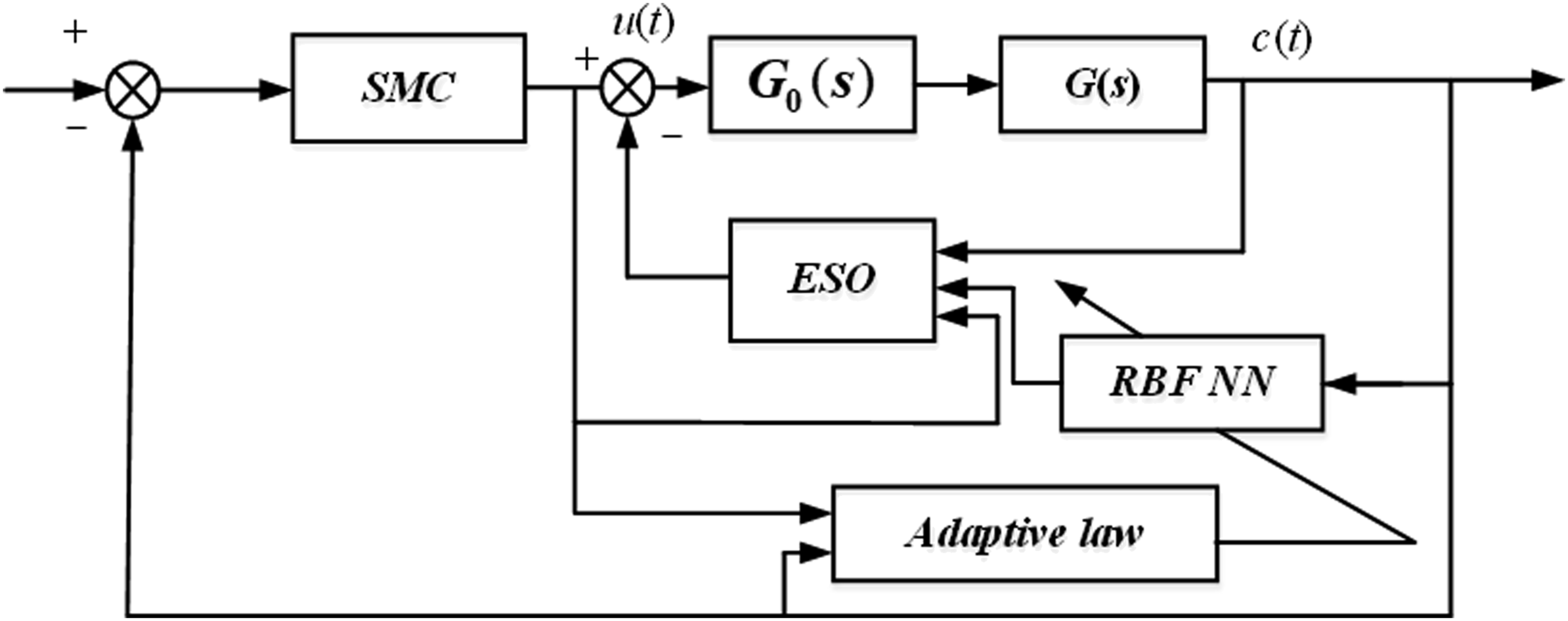
Particle swarm optimization algorithm
Particle swarm optimization (PSO) is an optimization algorithm based on swarm intelligence theory, in which the position of each particle represents a set of solutions, and each particle adjusts the solution through its own position vector and velocity vector. The objective function value is also known as the fitness value. The particles will fly in the search space according to the initially set speed, and constantly feedback the group information to update the optimal fitness value. At the same time, it is adjusting its posture to find the optimal fitness value in the local neighborhood.
The dimension of the search space is, which has N particles in total. The ith particle is an s-dimensional vector, it is shown as.
The flight speed of the particle is also an s-dimensional vector and it is given as

The optimal position of the particle so far is called individual extremum, which is shown as

The optimal position of the whole particle swarm optimization is called global extremum, which can be expressed as

Particles update their speed and position according to the following two indicators. Calculation steps of particle swarm optimization algorithm.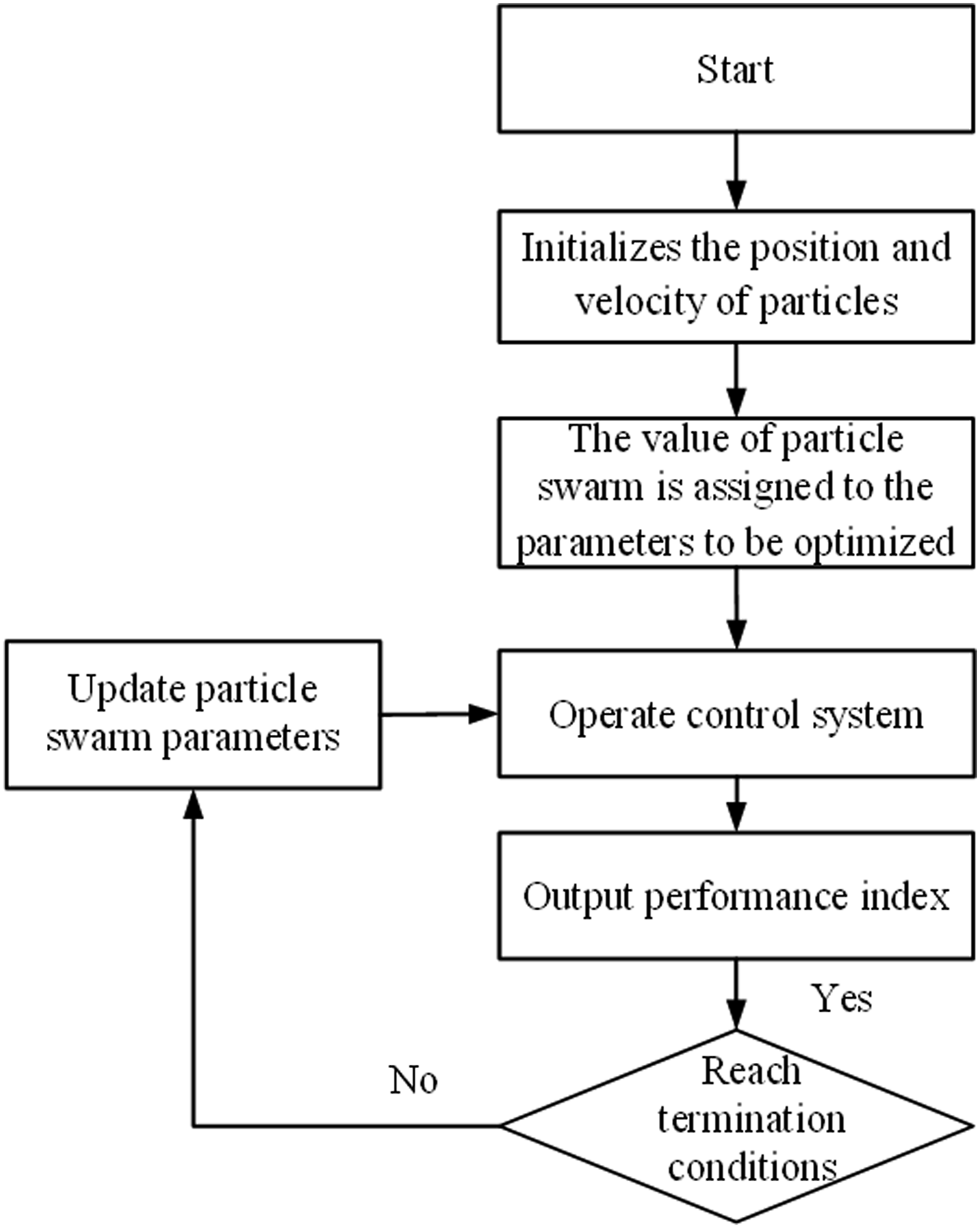

In literature [33], Shi proposed that larger weight inertia is conducive to global search while smaller weight is conducive to local search. Based on this theory, this paper designs an adaptive inertia factor adjustment strategy to make the algorithm have a large inertia weight w in the initial stage of search, so as to enhance its global search ability. With the increase of the number of iterations, the inertia weight w should be reduced gradually, so that the algorithm has strong local search ability in the late stage of search to improve the convergence accuracy. Hence, a balance between search speed and search accuracy can be achieved. The adaptive inertia factor adjustment strategy is designed as

When c1 is large, the algorithm has strong global search ability and can quicken the search speed. When c2 is large, it is conducive to local fine search and enhances the convergence accuracy. Similarly, adjust these two values with the number of iterations, the adaptive adjustment strategy is given as

In this paper, root mean square (RMS) of vibration displacement is selected as fitness value of particle swarm optimization algorithm. The expression can be described as follows:

Simulation results and analysis
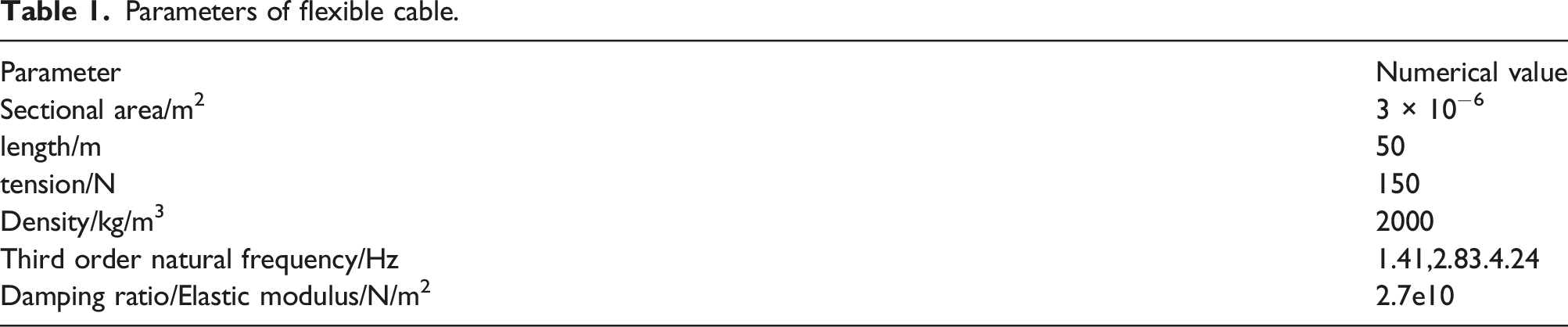
Parameters of flexible cable.
Sliding mode controller results
To verify the effectiveness of the designed reaching law, this paper first compares it with exponential reaching law, power reaching law, and double power reaching law. Set the initial conditions as y1 = 0.05 and y2 = 0, the effects of several controllers are shown in Figure 8. It can be seen that the approach law designed in this paper has better effect than several classical approach laws. Control effects of several reaching laws: (a) Displacement of several reaching laws; (b) Sliding surface of several reaching laws.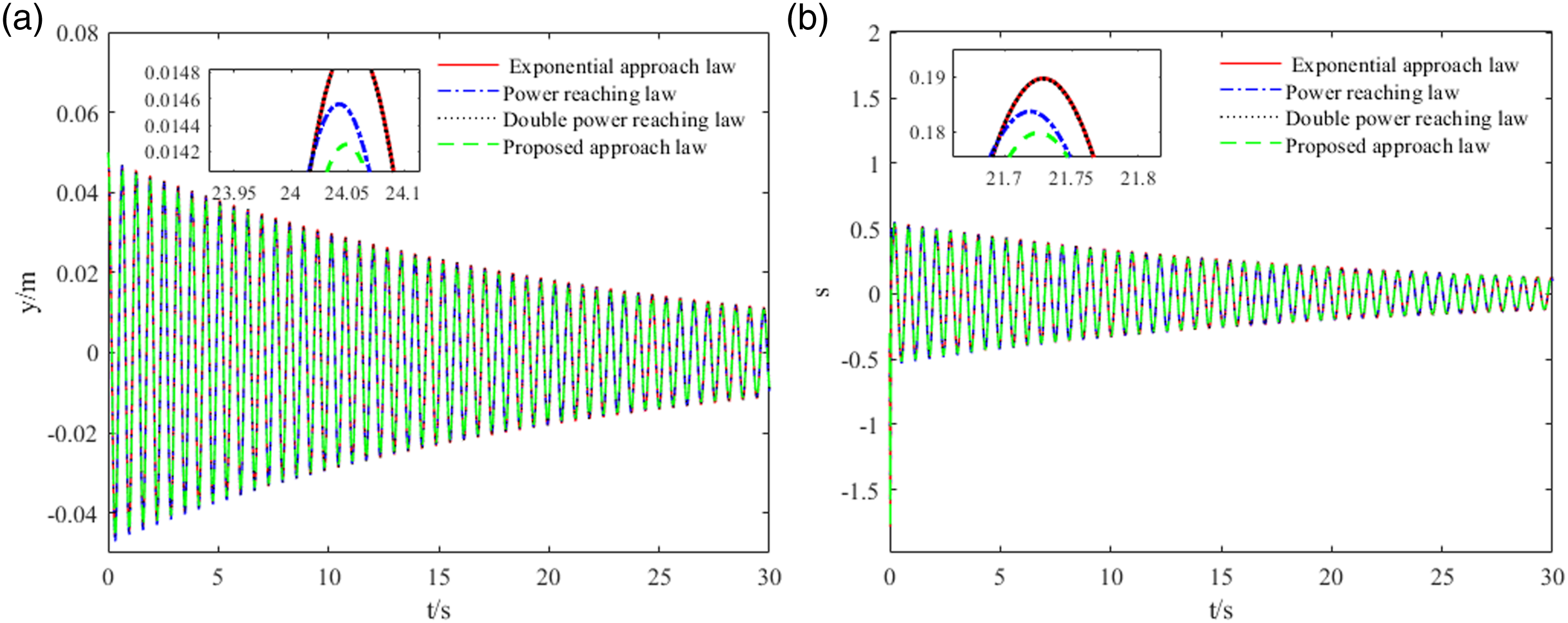
RBF neural network sliding mode controller with ESO results
To further improve the accuracy of SMC, the extended state observer with RBF neural network estimate and compensate the uncertainty and disturbance of the system effectively. To get closer to the actual working condition of flexible cable in orbit, an external disturbance excitation is applied at the position of 1/16 of the flexible cable, which is a composite excitation composed of a sinusoidal excitation and a random excitation. The frequency of sinusoidal excitation is the fundamental frequency of flexible cable, the amplitude is 0.5, and the random excitation is a Gaussian random signal with mean value of 0 and standard deviation of 0.5. The simulation results before and after adding the extended state observer based on RBF neural network are shown in Figure 9. Displacements of several points of flexible cable under external disturbance: (a) Displacement of 1/5 of flexible cable, (b) Displacement of 2/5 of flexible cable, (c) Displacement of 3/5 of flexible cable, (d) Displacement of 4/5 of flexible cable.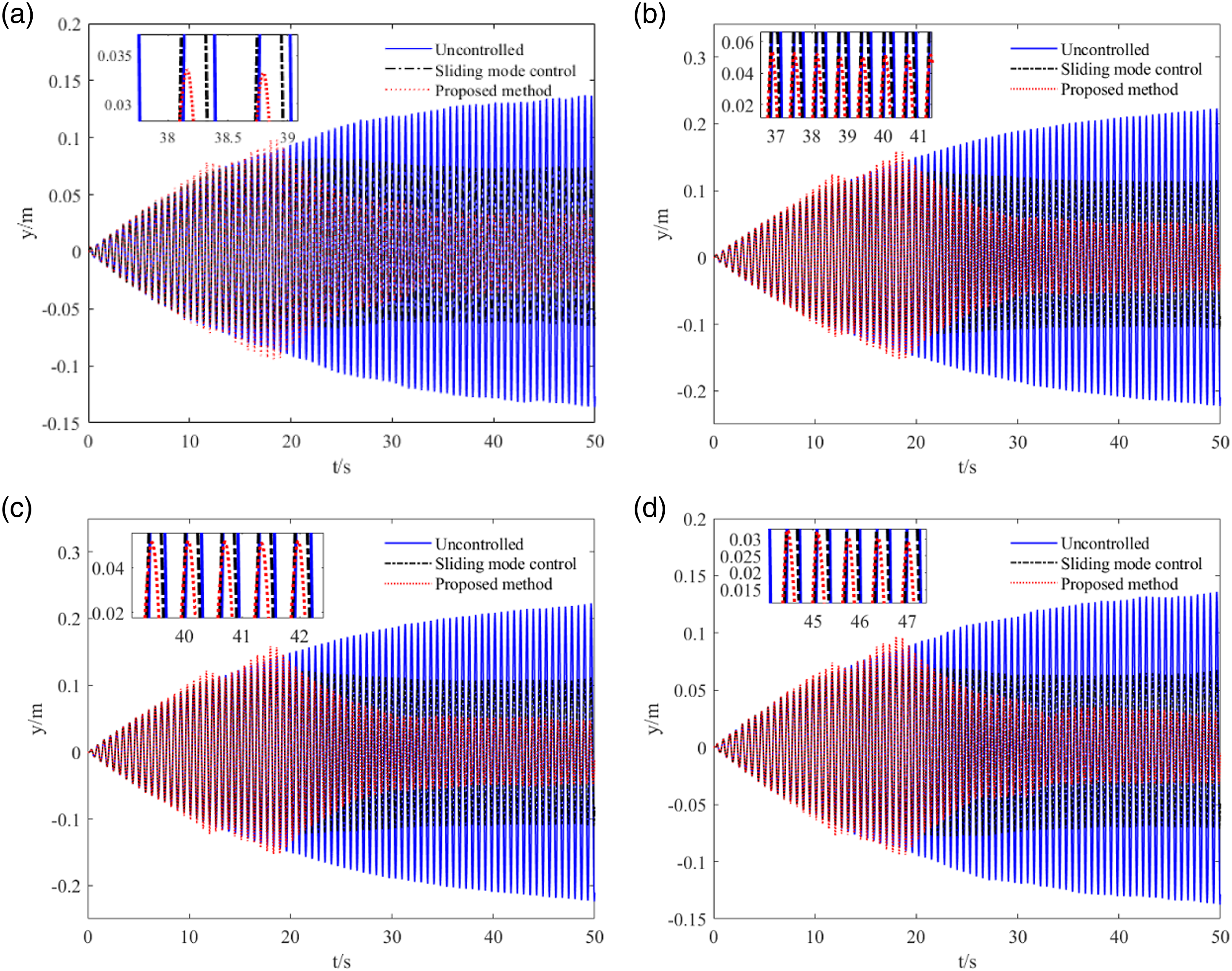
The RMS displacement of the SMC controller under external disturbance at 1/5, 2/5, 3/5, and 4/5 of flexible cable are 0.0463 m 0.0730 m, 0.0736 m, and 0.0450 m, respectively. By integrating the extended state observer with RBF neural network, the RMS displacement of the controller under external disturbance at 1/5, 2/5, 3/5, and 4/5 of flexible cable are 0.0374 m, 0.0592 m, 0.0586 m, and 0.0364 m, respectively. It demonstrates the effectiveness of the proposed controller.
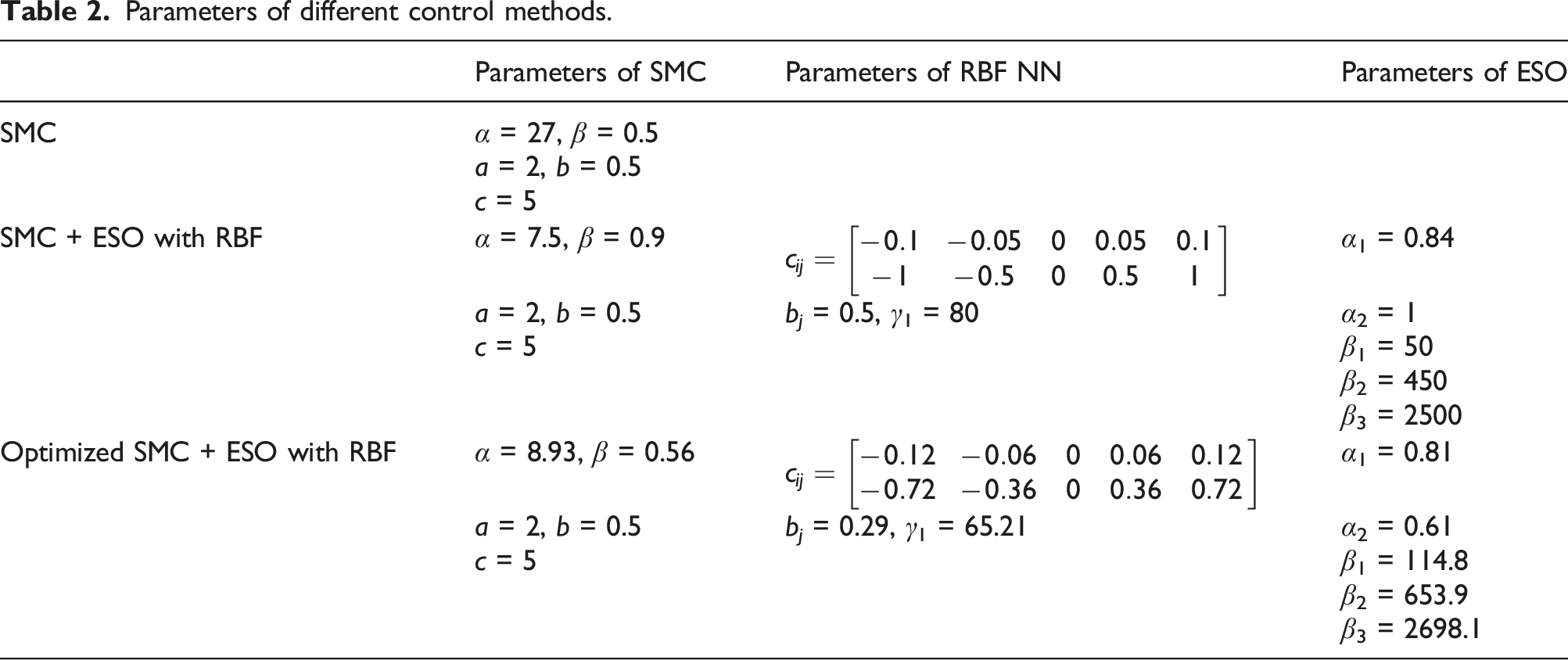
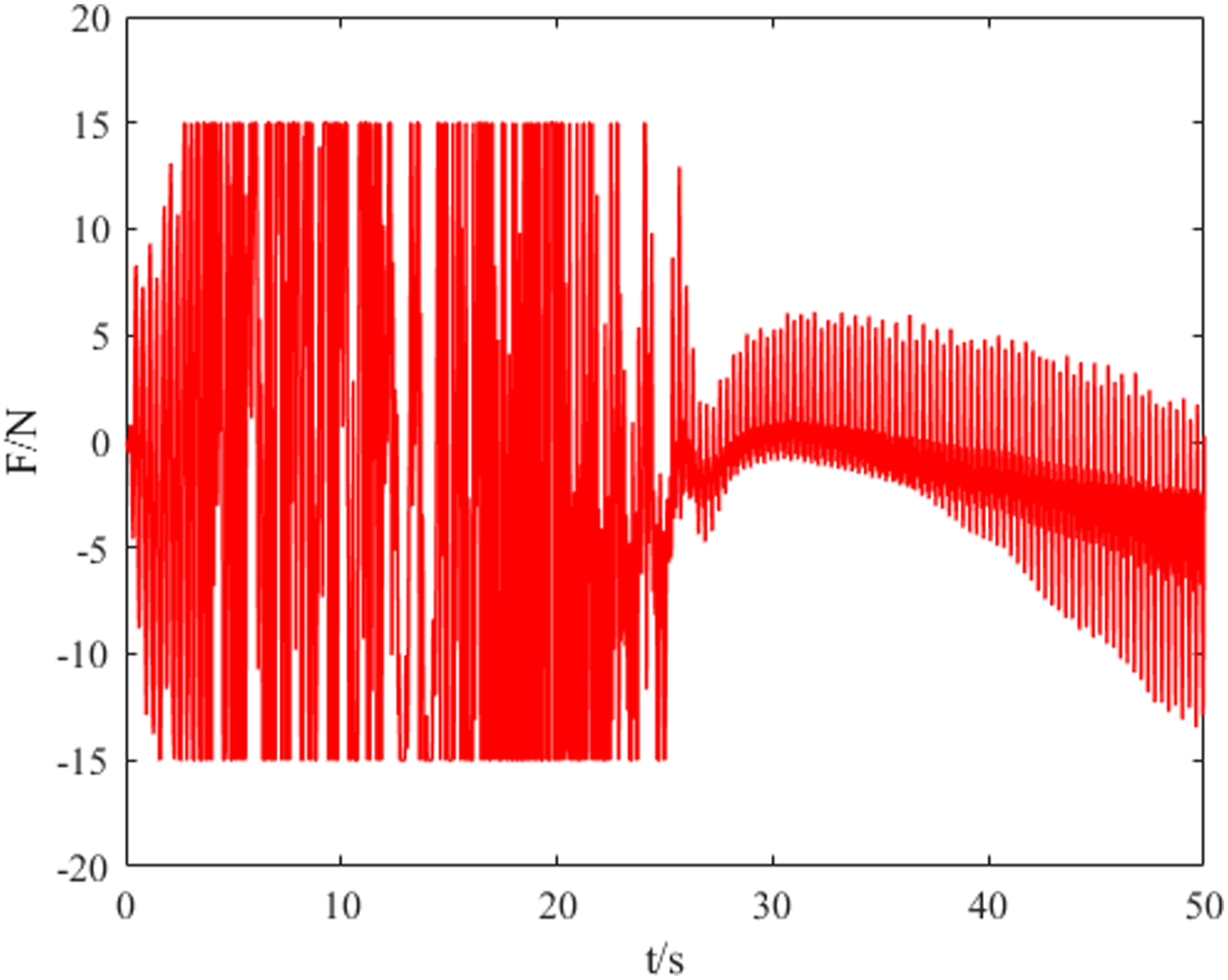
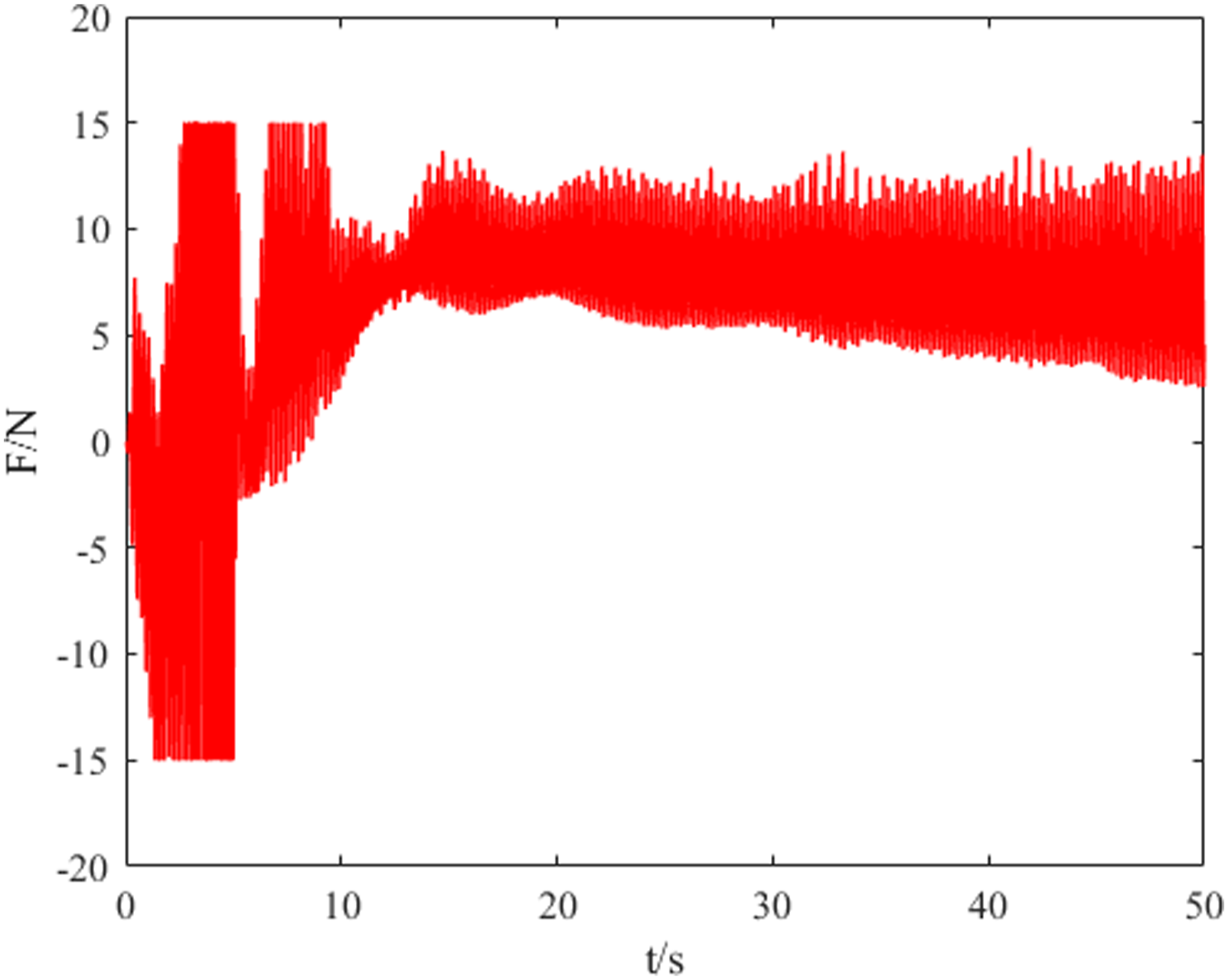
However, the controller has so many parameters that adjusting them by experience alone is very difficult and blind, and even fails to achieve the desired results. Consequently, the PSO algorithm is used to optimize the parameters of the proposed controller in a large range, and finally a group of controller parameters can be obtained. The simulation results of the optimized controller are shown in Figure 10. In addition, the simulation results of the non-optimized controller are also given for comparison. Displacement of several points of flexible cable under first external disturbance: (a) Displacement of 1/5 of flexible cable, (b) Displacement of 2/5 of flexible cable, (c) Displacement of 3/5 of flexible cable, (d) Displacement of 4/5 of flexible cable.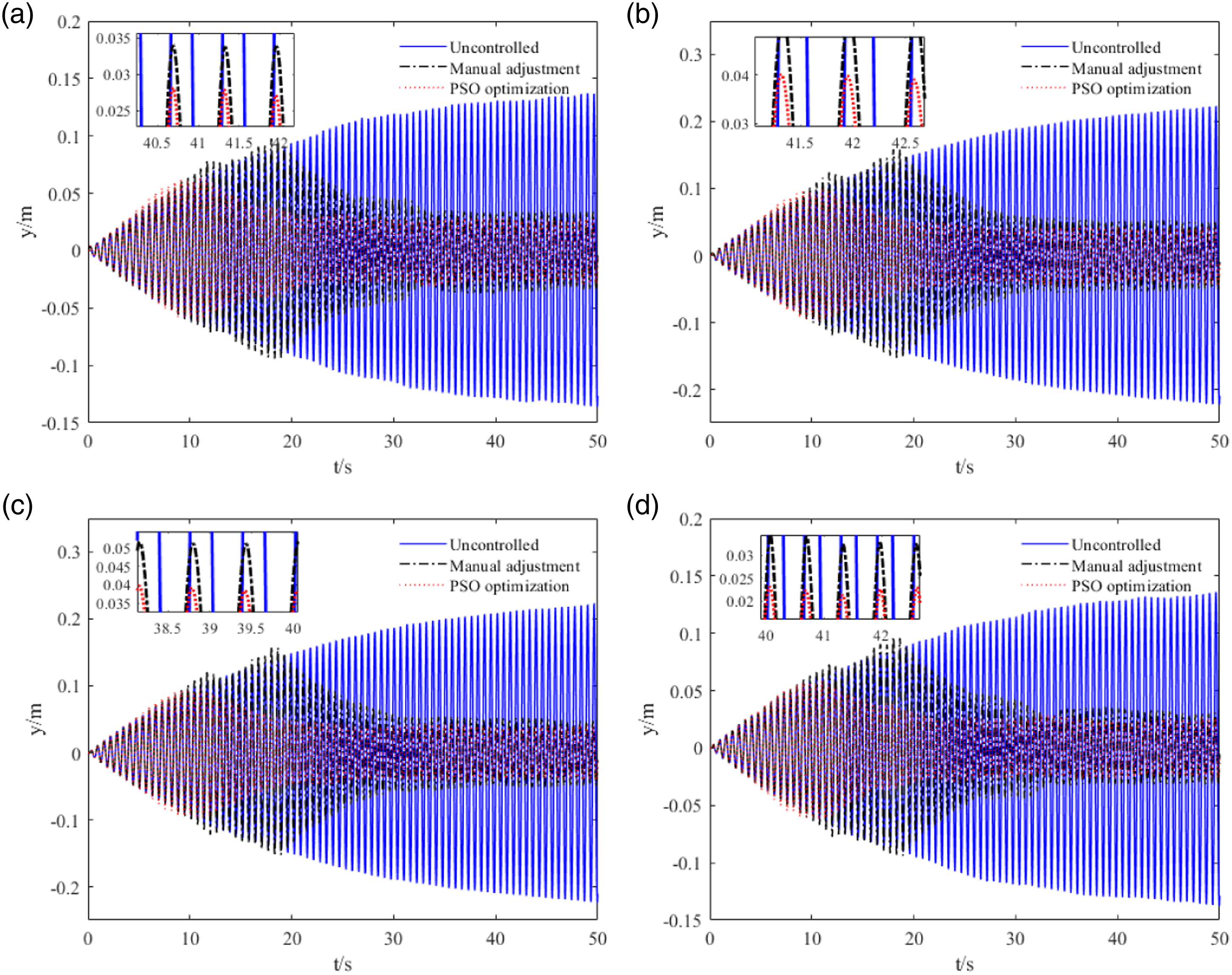
Parameters of different control methods.
RMS displacement of several points of flexible cable under external disturbance.

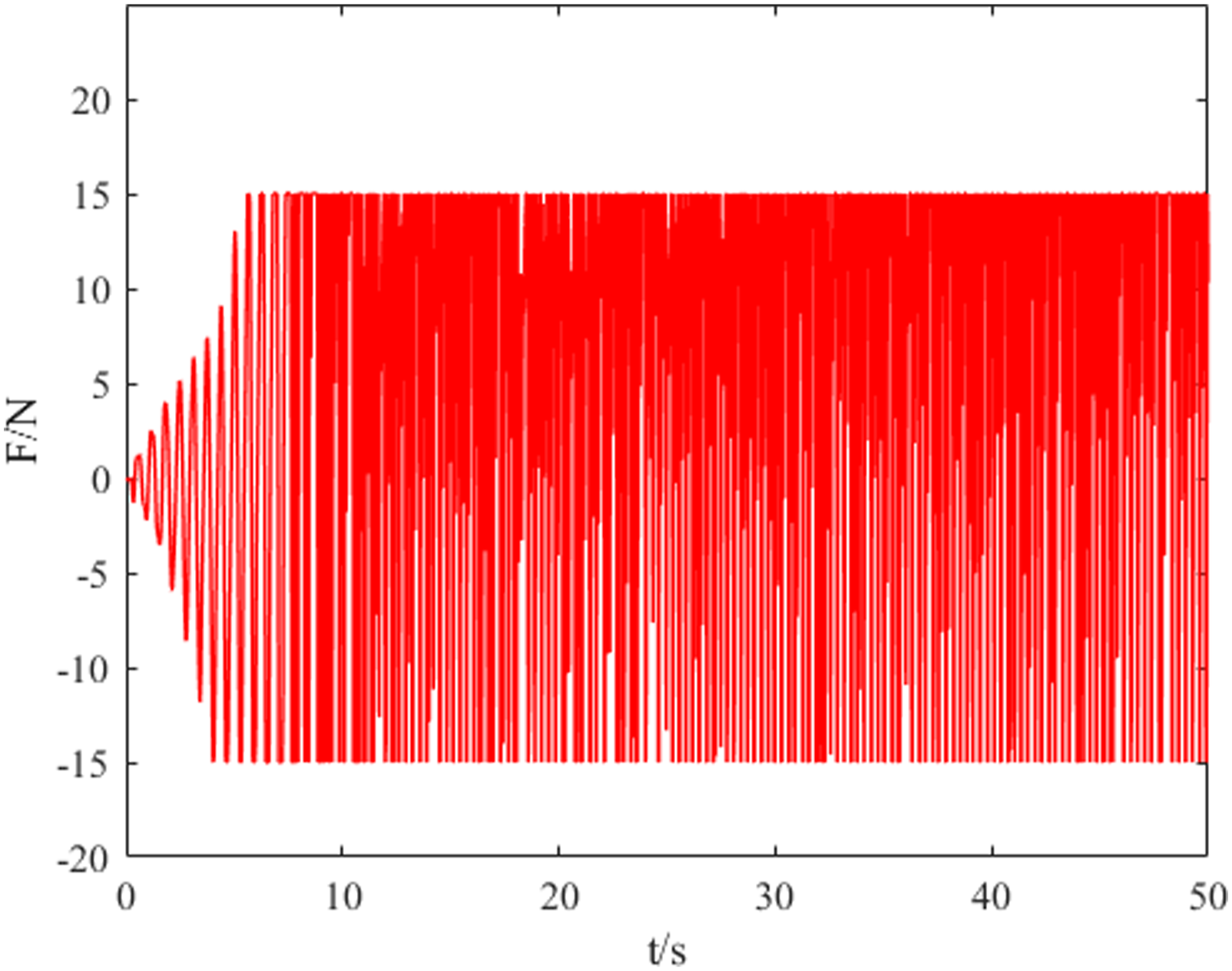
Control input of several points of flexible cable under first order external disturbance.
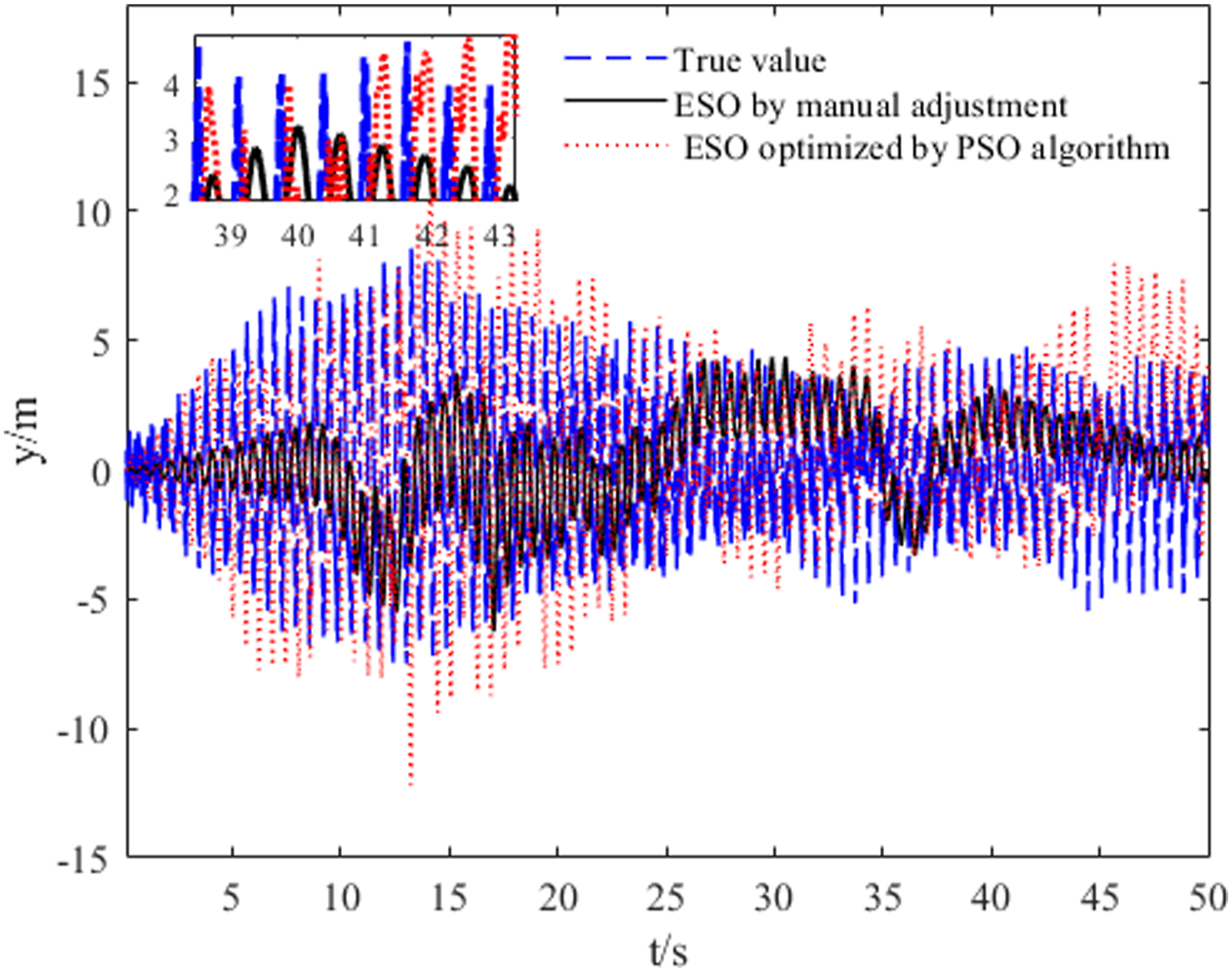
Optimized ESO with RBF neural network’s estimate value.
Applying a composite excitation consisting of second order sinusoidal excitation and random excitation at the same position of the flexible cable and suppressing its vibration using the proposed controller, the RMS displacements of the flexible cable at 1/5, 2/5, 3/5, and 4/5 are 0.0251 m, 0.0148 m, 0.0160 m, and 0.0245 m, respectively. After optimizing the controller parameters by using PSO algorithm, their displacements are 0.0250 m, 0.0166 m, 0.0152 m, and 0.0258 m. The detailed comparison results are presented in Figure 13. And the control force under second order external disturbance are shown in Figure 14. Displacements of several points of flexible cable under second order external disturbance: (a) Displacement of 1/5 of flexible cable, (b) Displacement of 2/5 of flexible cable, (c) Displacement of 3/5 of flexible cable, (d) Displacement of 4/5 of flexible cable. Control input of several points of flexible cable under second order external disturbance.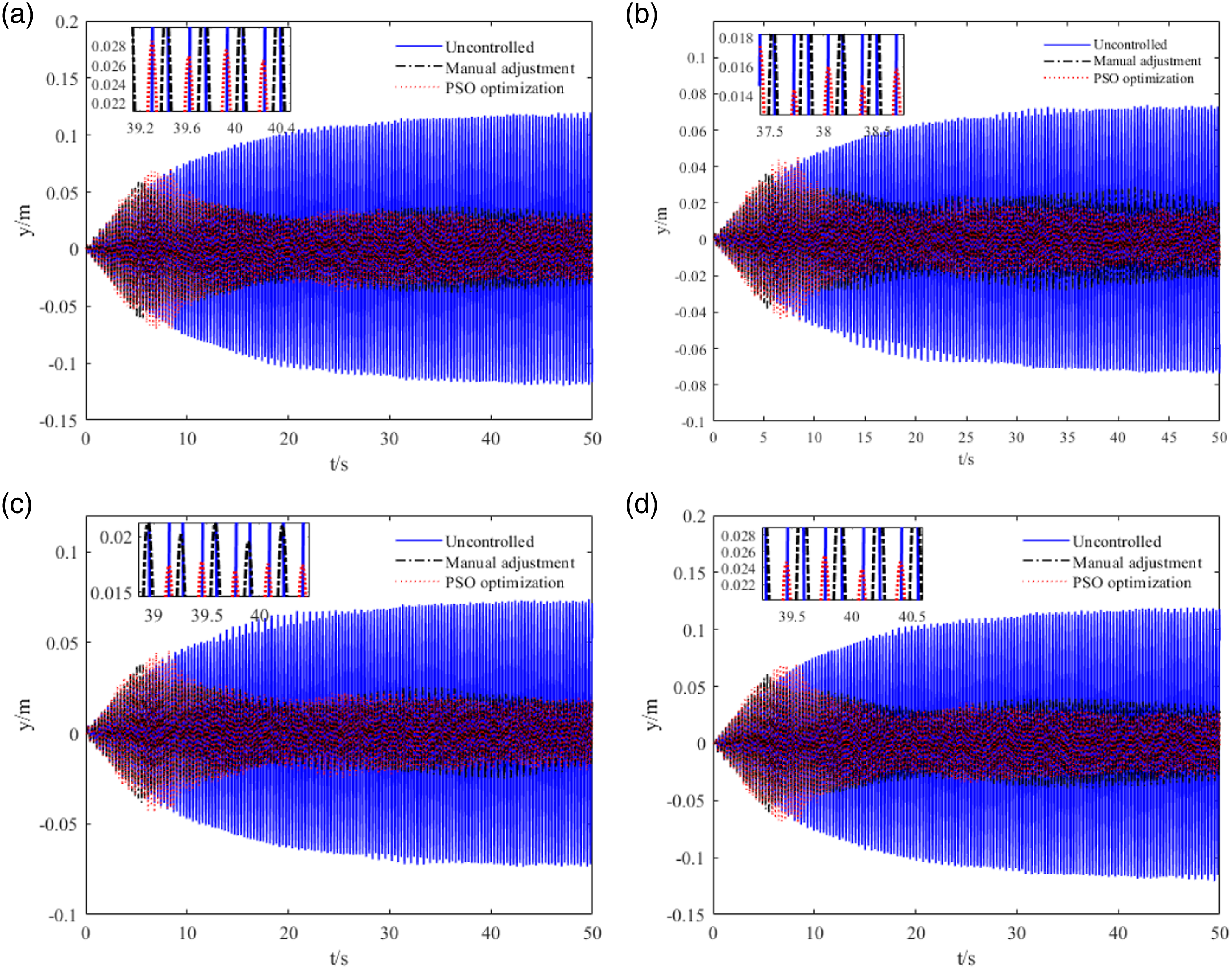
Applying a composite excitation consisting of third order sinusoidal excitation and random excitation at the same position of the flexible cable and suppressing its vibration using the proposed controller, the RMS displacement of the flexible cable at 1/5, 2/5, 3/5, and 4/5 are 0.0576 m, 0.0355 m, 0.0356 m, and 0.0575 m, respectively. After optimizing the controller parameters by using PSO algorithm, their displacements are 0.0248 m, 0.0160 m, 0.0155 m, and 0.0255 m. The detailed comparison results are presented in Figure 15. It demonstrates the effectiveness of the proposed method under second and third order sinusoidal excitation. And the control force under second order external disturbance are shown in Figure 16. Displacements of several points of flexible cable under third order external disturbance: (a) Displacement of 1/5 of flexible cable, (b) Displacement of 2/5 of flexible cable, (c) Displacement of 3/5 of flexible cable, (d) Displacement of 4/5 of flexible cable. Control input of several points of flexible cable under third order external disturbance.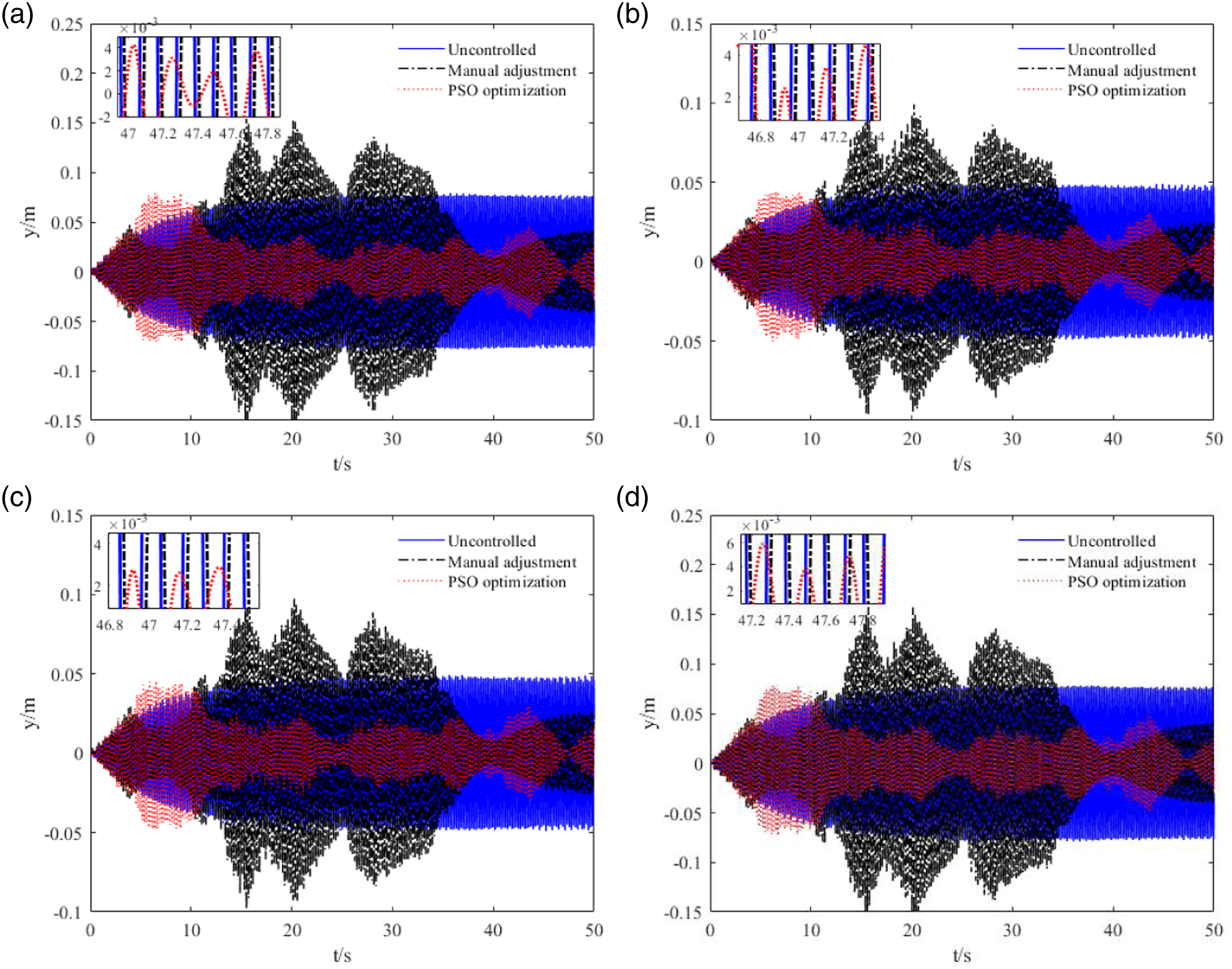
Conclusion
In this work, an improved sliding mode controller is put forward to achieve low frequency vibration suppression of flexible cables in complex space environments. The chattering of the sliding mode control is weakened by designing a new convergence law. Due to the uncertainties and disturbances in the system, we design an extended state observer with the RBF neural network to estimate and compensate them. In addition, an improved particle swarm optimization algorithm is designed to tune the parameters of the controller. The simulation results demonstrate the effectiveness of the proposed method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the authors are grateful for the financial support of the National Natural Science Foundation of China (52075446,51675430).