
Abstract
The Brushless Direct Current (BLDC) motor has many benefits due to characteristics like its small size and precise speed regulation. Uncertainty problems are presented by the system’s slow Proportional-Integral (PI) controller response time as well as some BLDC motor operating circumstances. The proposed Fractional-Order Proportional-Integral-Derivative (FOPID) controller and Difference of Orientation Offset Gaussian (DOOG) Grasshopper Optimization Algorithm (GOA) (DGOA) function are used to mitigate torque ripples in BLDC motors and overcome these drawbacks. An adaptive parameter has been introduced to enhance the performance of the conventional GOA method, and the performance of the suggested DGOA is compared to the benchmark functions. The simulation of the driver with the suggested DGOA-FOPID results in an improvement in Torque Ripple Reduction and speed control is obtained that better torque ripple reduction and speed regulation have been achieved.
Keywords
Introduction
Motivation and incitement
There are numerous ways offered for the Torque Ripple Reduction (TRR) in BLDC motors. With the use of disconnected current sensors in the motor phases, the commutation torque ripple can be significantly reduced. This method’s main flaw is that unipolar PWM cannot be used to operate it. This results from the switching states of the switches in the driving circuit changing the voltage between the neutral points of the inverter and the BLDC motor.
A proper management strategy for TRR is required for small capacitor based drives in order to eliminate torque ripple without affecting motor speed. However, the effectiveness of the controller is a key aspect when using it for ripple reduction and speed control. The employed controller should be able to quickly achieve the steady-state responses. 1
Literature review
The PI controller, which produces a sluggish response in the system and uncertainty problems in some BLDC motor operating conditions like Genetic Algorithm (GA), Particle Swarm Optimization (PSO), and Bat Algorithm (BA), is without a doubt the speed controller that is most preferred for BLDC motors. Recently, a PI controller using Optimization Algorithms (OAs) has been created to manage the torque and speed of BLDC motors. Genetic operators form the foundation of the GA process. To overcome the aforementioned BLDC motor problems, an effective technique-based advanced PID controller is required. As a result, an improved control technique has been suggested in the work to address the aforementioned problems. An improved FOPID controller is used in this article to manage the speed and reduce torque ripples in BLDC motors. 2
Contribution and paper organization
This research uses a TRC approach with a tiny size capacitor-based Voltage Source Inverter (VSI) drive to minimize torque. It is crucial to utilize the right controllers in BLDC motors to mitigate the TR issue. These controllers must handle the TR issue while maintaining motor speed. The implementation of an optimized FOPID controller for the process of speed control and ripple reduction is presented, along with an illustration of the design analysis and modeling of a BLDC motor. It has been demonstrated how to use the suggested DGOA approach. 3
Novelty of the work
The main goal of the research projects is to use efficient controllers to eliminate Torque Ripples (TRs) from BLDC motors without affecting speed. According to this theory, using a FOPID controller instead of a traditional PID controller will result in less oscillation and a negligible settling time. By optimizing the gain and order parameters of the FOPID, it can be improved. The FOPID controller has been taken into consideration for optimal tuning because it is simpler to use and offers greater response in a novel DGOA that has been provided.
FOPID controllers can be configured effectively to provide higher dynamic performance than traditional PID controls. The five associated parameters that make up a typical FOPID controller are proportional gain (KP), integral gain (KI), derivative gain (KD), an order of derivative (μ) and order of Integral (λ). When the values (μ and λ) of the parameters are set to unison, a FOPID controller will become a PID controller. The ideal calibration of the aforementioned parameters is crucial for achieving superior performance mostly in the use of FOPID and PID controllers in the closed - loop system with drive systems. 4
Suggested system
In this study, a voltage source inverter (VSI) drive based on a TRC (Torque Ripple Compensation) approach with tiny size capacitors was used to lower torque. It is crucial to utilise the right controllers in BLDC motors to mitigate the TR (Torque Ripple) issue. These controllers must handle the TR issue while maintaining motor speed. As a result, 5 the effectiveness of TRC is improved by substituting an appropriately designed FOPID controller for the Spider Web-based Controller (SWC). Reduced oscillation and a negligible settling time are benefits of using FOPID controllers over traditional PID controllers. By optimising the parameters like order and gain of the FOPID, it can be improved. An innovative DGOA has indeed been proposed for optimal tuning.
Grasshopper optimization algorithm (GOA)
One type of insect, known as a grasshopper, is regarded as a pest because of the harm they do to agricultural and crop productivity. Although grasshoppers are typically encountered alone in the wild, they can also gather in enormous groups. 6 The scale of such swarm may well be horrifying for farmers and of mainland range. The unique characteristic of said grasshopper swarm is how it can form both as a nymph and as an adult. 7 Thousands of nymphs congregate to create a swarm; they jump and move like rushing cylinders. They eat substantially all living vegetation while travelling. When they are adults, they congregate in swarms in the atmosphere and move across a bigger area. When grasshoppers are nymphs, they migrate slowly and take small steps, but as adults, they move quickly and take more steps.
As part of their life cycle, grasshoppers create swarms primarily to look for food. The search process is typically divided into two cliques by bio-inspired algorithms: exploitation and exploration. The searching agents have been encouraged to relocate quickly during the exploration phase. But at the other side, during the exploitation stage, they move slowly.
The process of looking for food is strengthened by grasshoppers across both stages. Therefore, a novel bio-inspired algorithm could be created by mathematically illustrating this grasshopper lifecycle.
8
Equation contains the mathematical expression created to imitate the swarming of grasshoppers (1)





Equation (4) uses ‘l’ as the measure of attractive length and also uses ‘η’ as the force of attraction. The function sf function, while 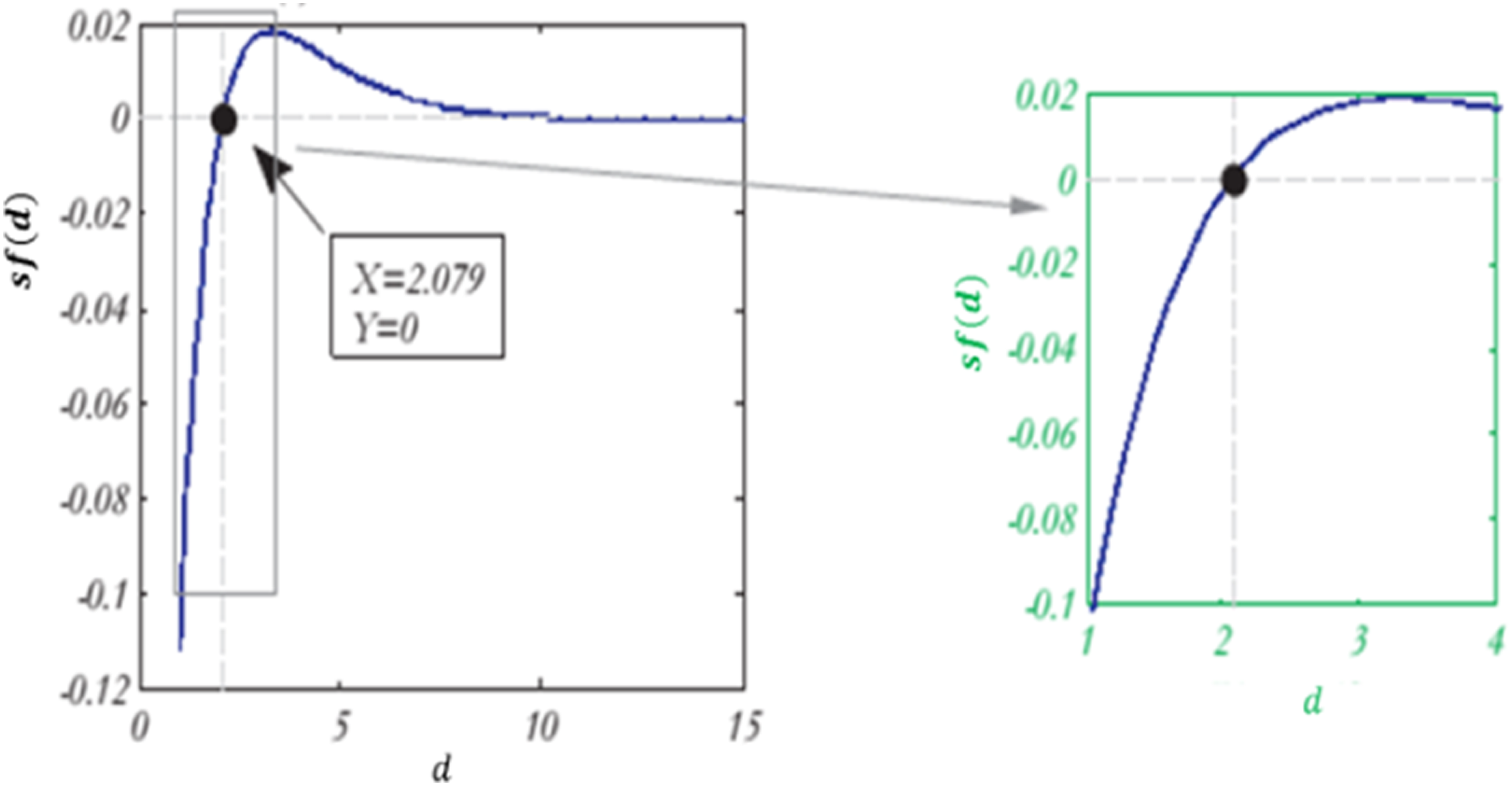
It is noted through Figure 1, that while ‘d’ equals 2.079, then that makes the magnitude of sf(d) equal to 0. It suggests that there has been no attraction and repulsion between grasshoppers when they are separated by 2.079 units, or when there is no social contact. The term “comfortable distance” or “comfort region” refers to this area. 3 Figure 1 also shows that the force of attraction starts to increase at a distance of 2.079 units and gradually diminishes as it approaches a distance of 4 units.
The parameters η and l in equations (4) and (5) can be changed to get different social Figure 1 also shows that the force of attraction starts to increase at a distance of 2.079 units and gradually diminishes as it approaches a distance of 4 units. The parameters η and l in equations (4) and (5) can be changed to get different social patterns in artificial grasshoppers. It is shown that the comfortable region, attractiveness region, and repelling region are all subtly modified by the parameters η and l. In Figure 2, a theoretical design employing the sf function is shown to illustrate the interactions between grasshoppers as well as the comfort level. Grasshopper’s Swarm socializing with one another.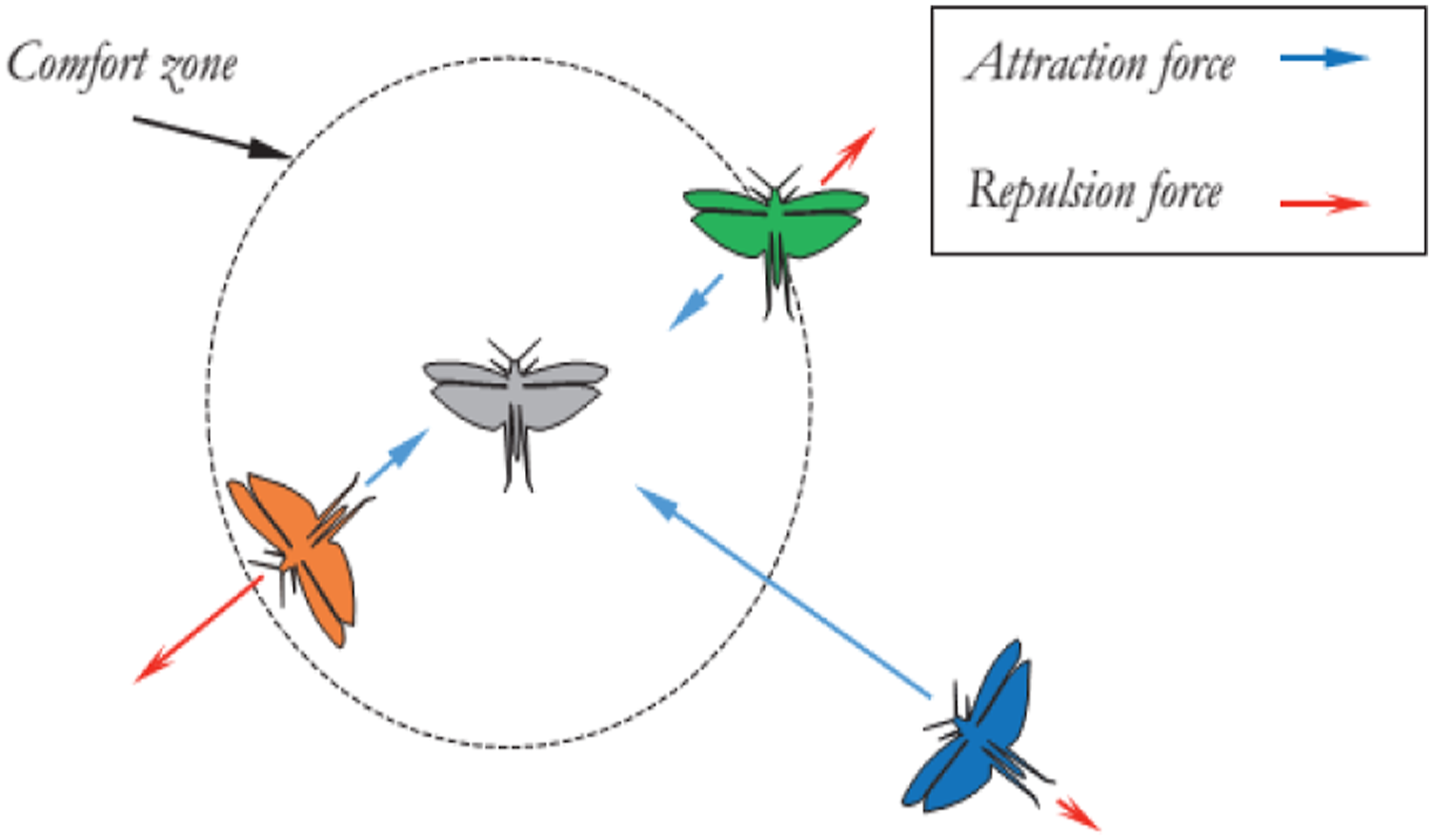
Difference of orientation offset gaussian GOA (DGOA) algorithm
The disadvantage of the traditional GOA should first be examined in order to acquire the improved presentation of the conventional GOA. In GOA, all grasshoppers' positions are first initialised arbitrarily. The grasshoppers then migrate in the direction of the target to update their positions. The disadvantage of this is that grasshoppers might easily become absorbed by the local best if their positions are initialised to be beyond the global best and close to the local best. As a result, it should be kept in mind while adding enhancement tactics that search agents should avoid falling into the neighbourhood’s best trap. The adaptive parameter is also the standard GOA’s declining coefficient (γ), which is given in equation (6), is iteration-dependent and ignores the dynamic reaction during the search process.
9

The constraint (



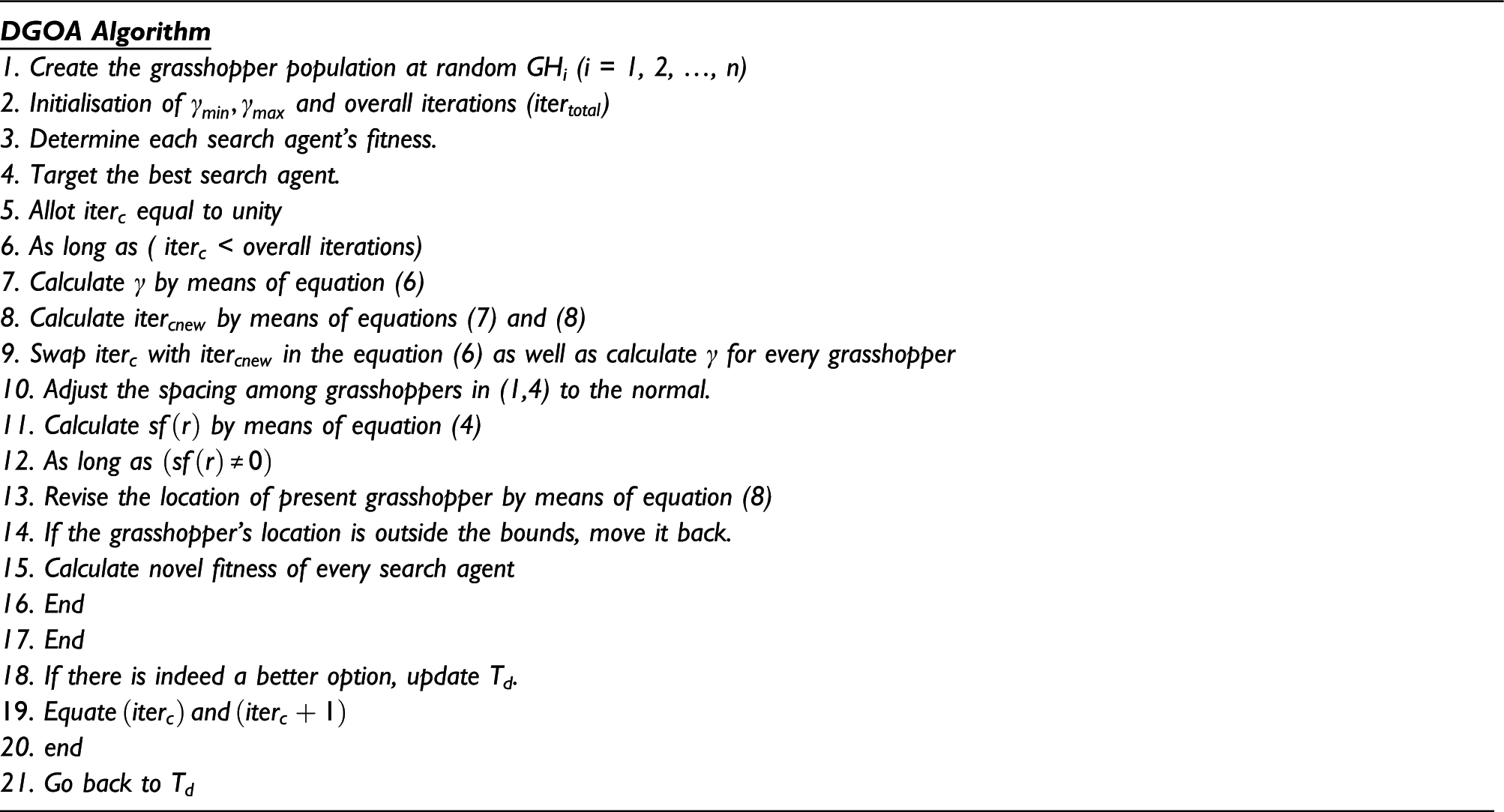
Flowchart for DGOA algorithm.
Advantages of the DGOA algorithm
Maturized convergence is DGOA’s main benefit over traditional GOA. In the typical GOA, the convergence is easily achieved with immature solutions, which results in inadequate precision. The DGOA swarming activity is accomplished in a distributed manner to achieve greater accuracy in investigating global options and using local solutions. Difference of Orientation Offset Gaussian (DO3G) function implementation results in intense local and global solution searching since search agent positions are altered each time in a well-distributed manner.
Development of the FOPID control scheme
The derivative gain (KD), order of derivative (μ), integral gain (KI), proportional gain (KP), and order of the integral (λ) are the five essential parameters that typically make up a FOPID controller. The FOPID controller becomes a PID controller whenever the parameters “μ” and “λ” are set to one. The ideal configuration of the aforementioned parameters is crucial for achieving greater efficiency in the use of FOPID and PID controllers as in closed control scheme with drives.
Mathematical fractions
Quasi systems, or FO (Fractional Order) systems as they are often known, could be thought of as an enhanced version of numeric systems. Fractional calculus is currently used extensively in contemporary Science and Engineering applications. A Riemann-Liouville formula is the most widely used of the fractional derivative formulas that have been reported in numerous researches. The fundamental quasi order operator 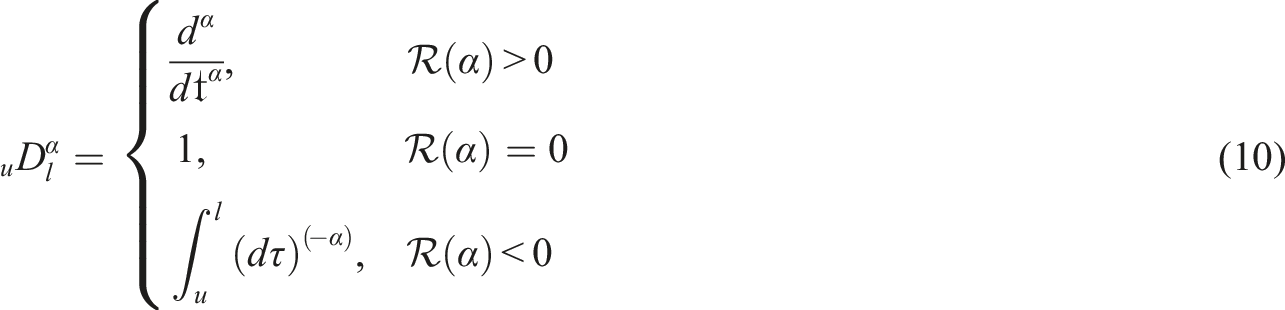
Sustainability of systems with fractional orders
The interval Fractional Order Linear Time Invariant (FO-LTI) scheme is as follows
This system matrix being unsure in the view that
Estimation of fractional-order operator
PID-based controls are simpler to construct and use. On the other hand, fractional order-based controllers are challenging to design and require rigorous math computations. Despite the aforementioned shortcomings, these controllers offer more precision. The hardware solution becomes challenging since the fractional order differentiator (integrator) in the FOPID controller has unlimited dimensions.
Nevertheless, in industry applications, the band-limited design of FOPID controllers employing higher cognitive logical transfer function assumptions of such integro-differential operator offers acceptable performance. 11 The transfer functions that include fractional ordering of s need typically be approximated with transfer functions of integer order.
Where, KD, KI, and KP respectively, stand for the derivative gain, integral gain and proportional gain. Figure 4 illustrates an integral-differential order for said FOPID controller design. The FOPID controller’s architecture.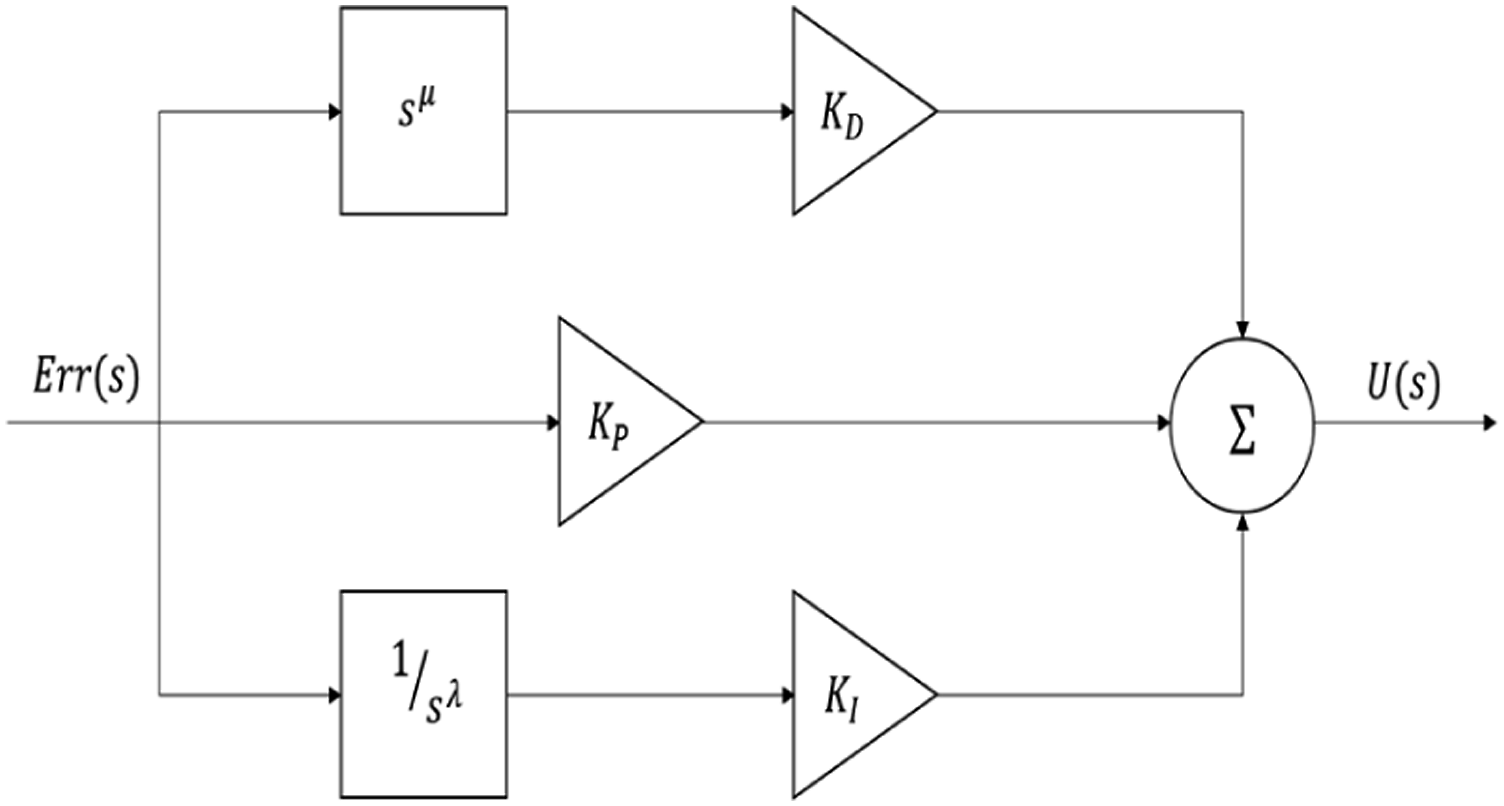
Regulation of speed with DGOA-FOPID
The suggested controller unit is provided with rotor position data. The speed then is determined and put into a comparator for comparison with the reference speed. As shown in equation (12), the resulting erroneous speed value is determined.
Thus, 

The six step inverter’s switches are then given PWM signals by the controller.
Applying DGOA-FOPID in TRC
The TRR (Torque Ripple Reduction) in motor operation is, nevertheless, examined for the suggested controller method. One of its most critical circumstances that a motor must effectively navigate in order to get beyond the significant TR generated is high-speed running. To lower the motor TR at faster rpm for the DTC (Direct Torque Control) technique of three-phase BLDC motor using the proposed technique, an enhanced technique is also being proposed under the formation of TR.
The source DC link voltage (VDC) is compared to the motor’s back emf (E), which is measured on the basis of the rotor position, for TR adjustment. FOPID2 modifies the duty ratio of said switch SC depending upon that difference in the two levels so that the capacitor can supply the energy if necessary for the phase current adjustment. TR is then suppressed in the motor. The DGOA method is used to optimize the FOPID2, as well as the objective function is provided below.


Additionally, it varies according to the input voltage, which reduces its motor torque-ripple. Figure 5 illustrates the use of FOPID tuned by means of DGOA for the TRC technique. Application of the suggested method with the DGOA-FOPID control.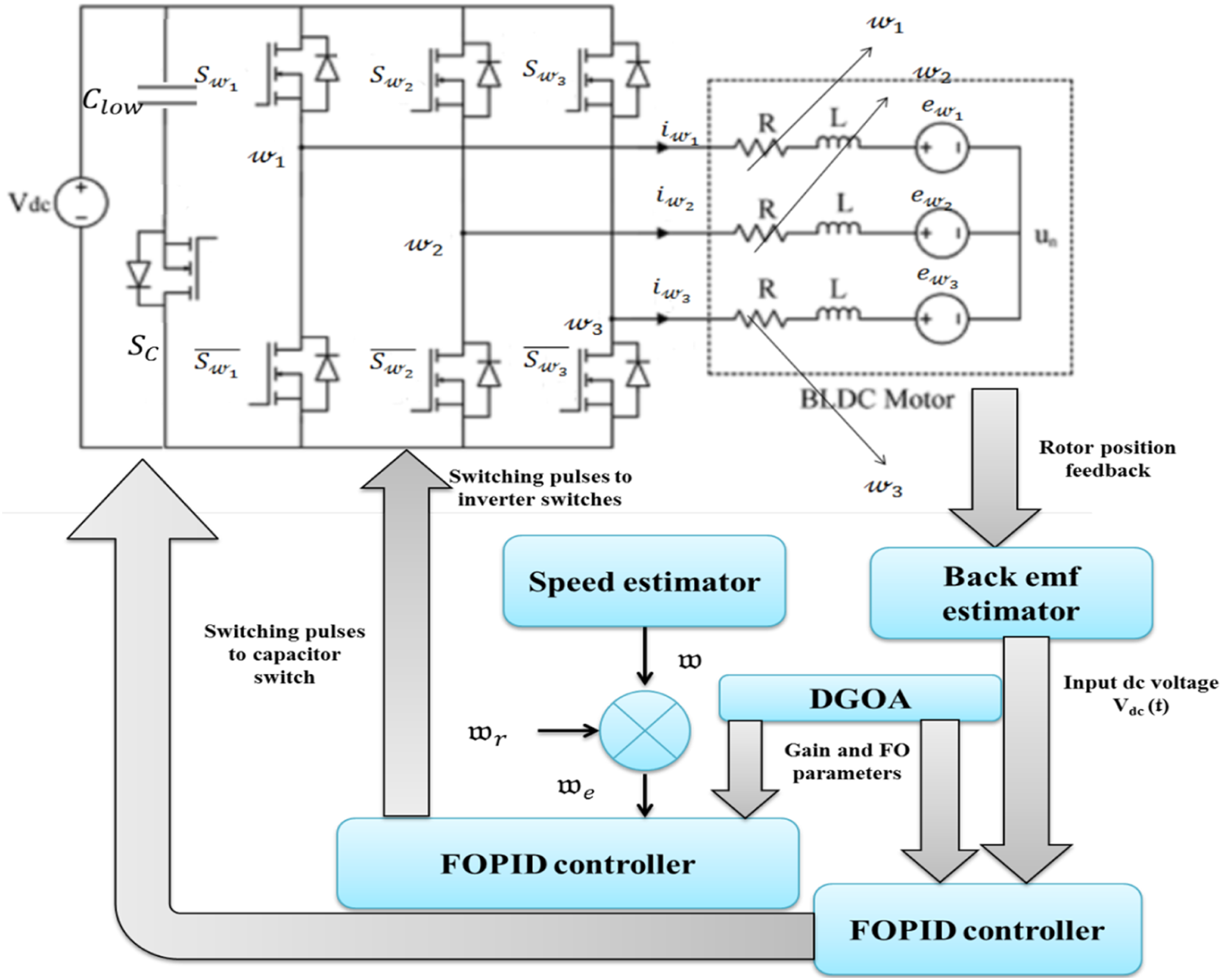
FOPID parameter tuning with DGOA
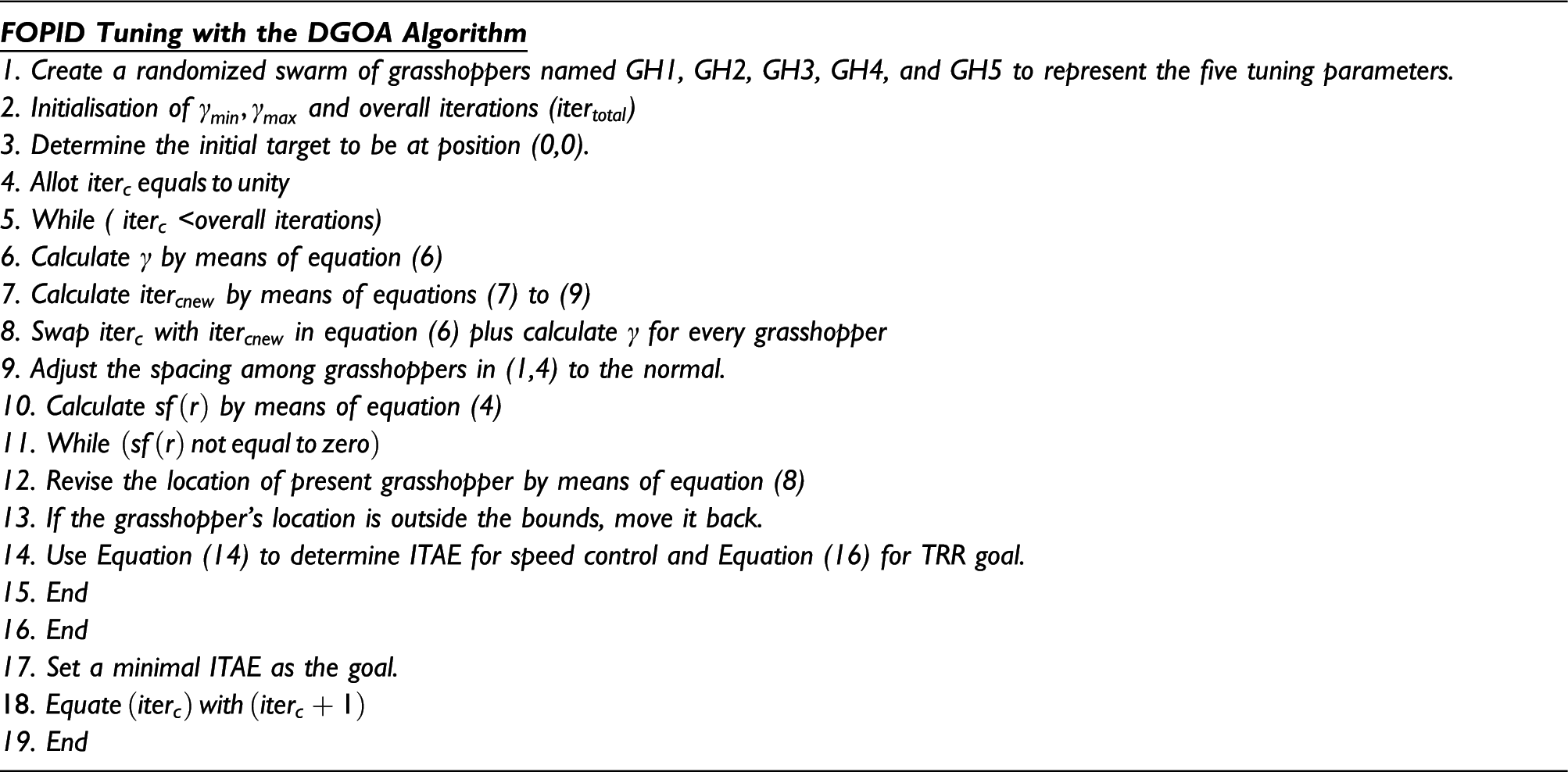
Flowchart for FOPID tuning with the DGOA algorithm.
Control measures used at the DGOA.

Results and discussion
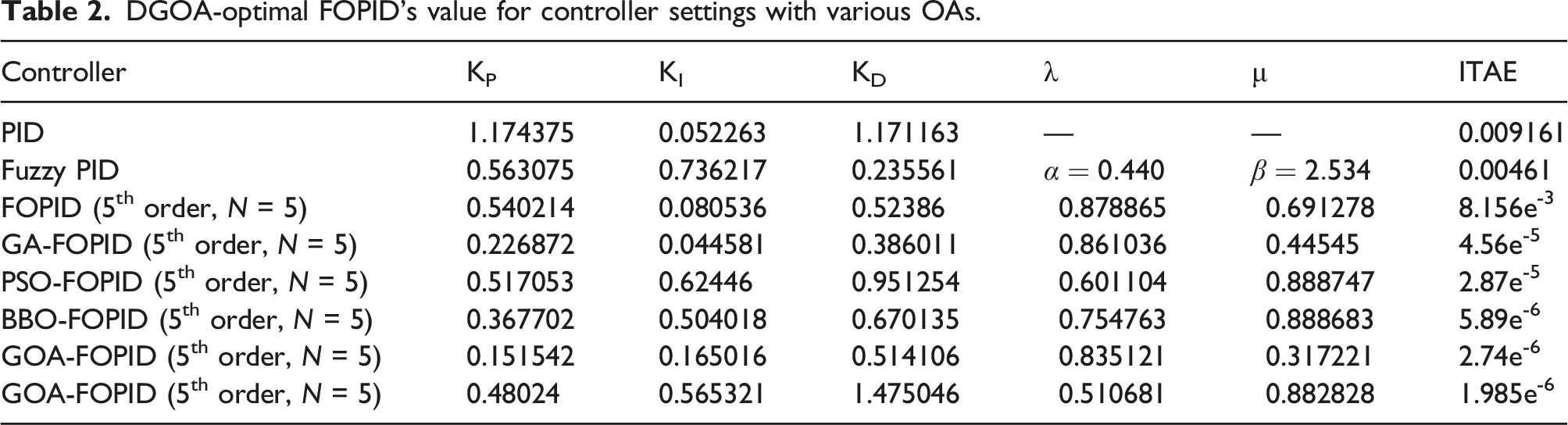
DGOA-optimal FOPID’s value for controller settings with various OAs.
It is found that the suggested DGOA-FOPID exhibits the desired DC link voltage, phase current, torque response and speed response curves. The following conclusions also undergo comparative study, which is done and displayed in graph form. 1. Capacitor free BLDC drive, 2. Tiny capacitor BLDC drive 3. Huge capacitor BLDC drive 4. BLDC drive using a TRC technique and a tiny capacitor. 5. Small capacitor BLDC drive with TRC technique and FOPID controller.
The variation in phase current im(t) is obtained using the TRC technique and DGOA-FOPID, in which the ripple levels are lower, is shown in Figure 7. Improved compensation is provided by the suggested technique using inexpensive capacitors. Phase current im response for a BLDC motor drive which uses a tiny capacitor DGOA-FOPID.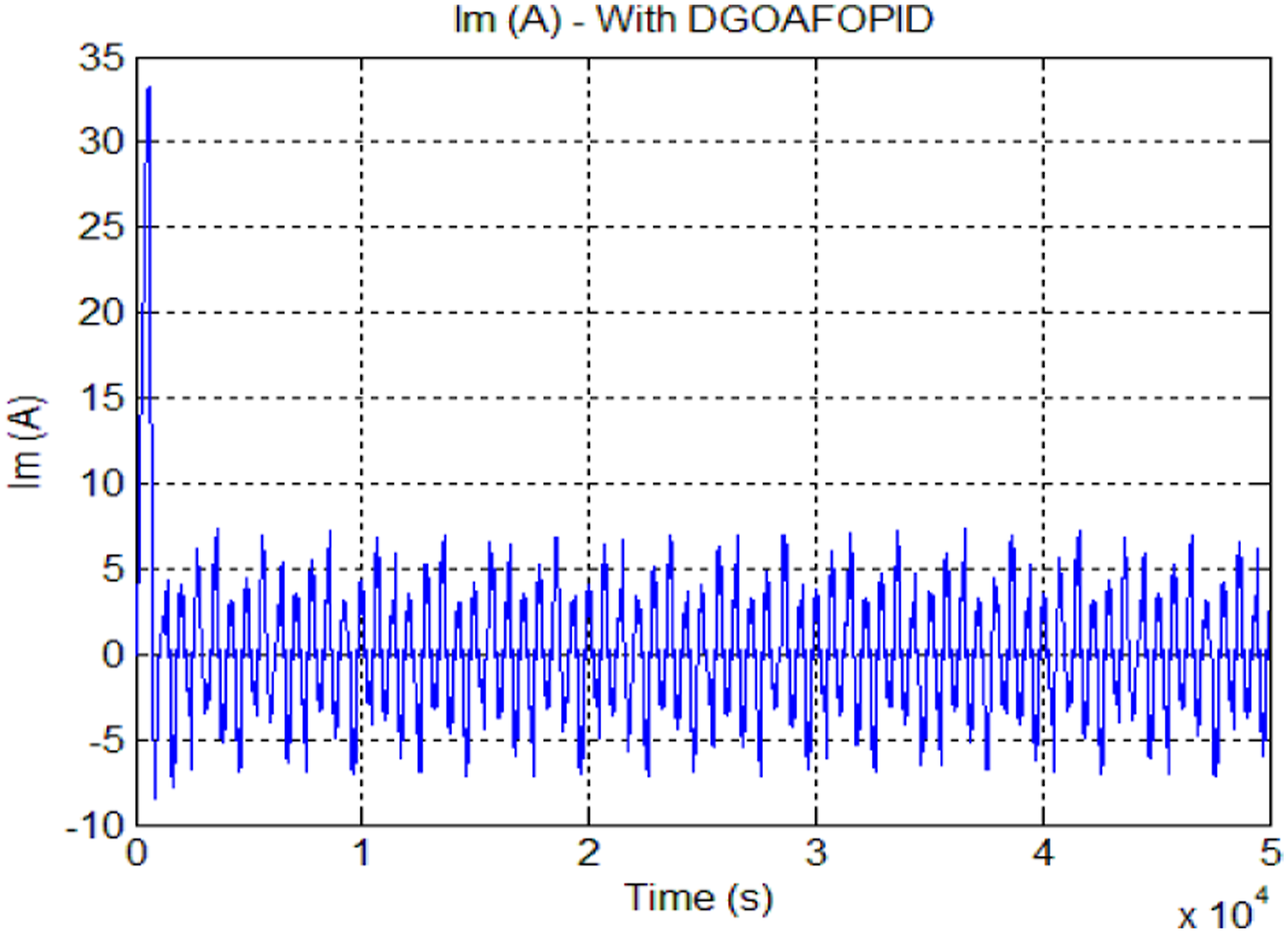
Over an extended period, this same phase current is continually maintained. It immediately becomes similar to the baseline current value when it approaches zero. As a result, its torque ripple significantly decreased. Figure 8 provides a comparative analysis of phase current restoration for various scenarios. From Fig., it can be seen that the waveform has less ripples than in other situations. Phase current comparison for various instances using DGOA-FOPID.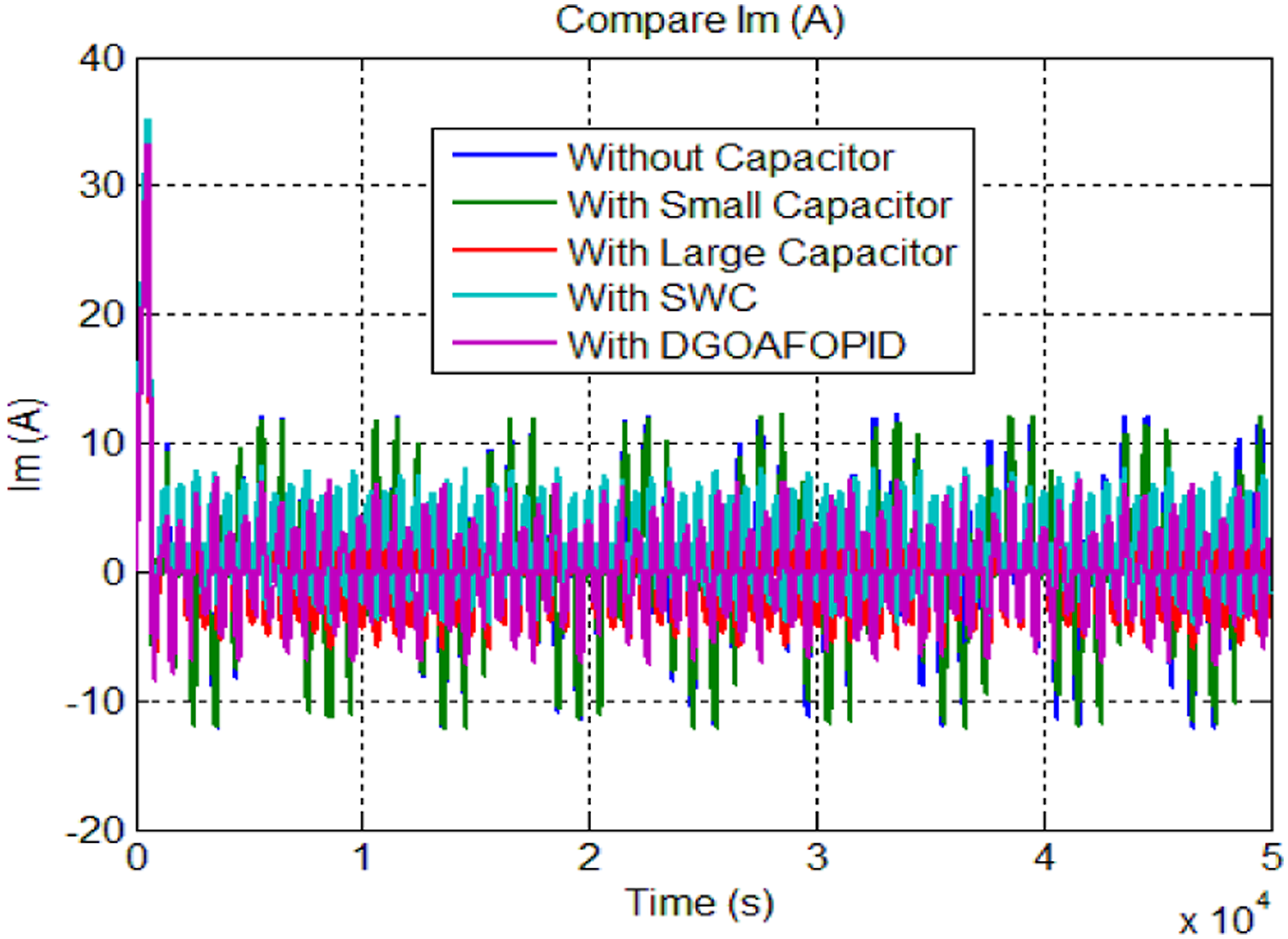
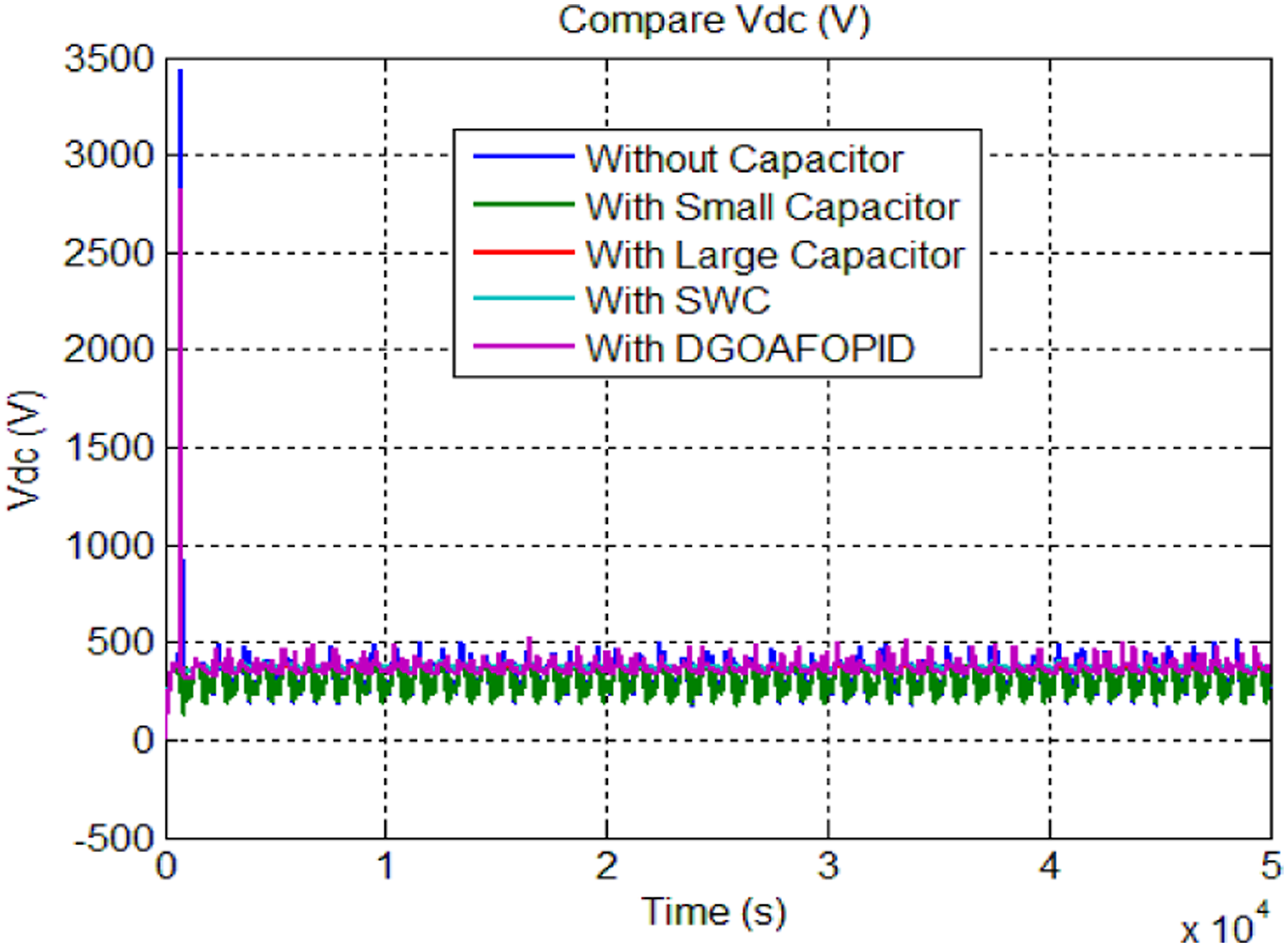
DC link voltage level for TRC and DGOA-FOPID is shown in Figure 9. In this instance, even though the voltage increases abruptly, once it reaches steady state, it exhibits very slight oscillations in the waveform, as can be seen in Figure 9. Additionally, it is implied that the proposed work has less fleeting errors. Due to the speed with which the dc link voltage level is driven to a constant value, the phase current are becoming discontinuity-free and the torque ripple will also decrease. Figure 10 compares the DC link voltage in each scenario. BLDC motor drive VDC using DGOA-FOPID and a tiny capacitor. DC link voltage comparison using the DGOA-FOPID in all scenarios.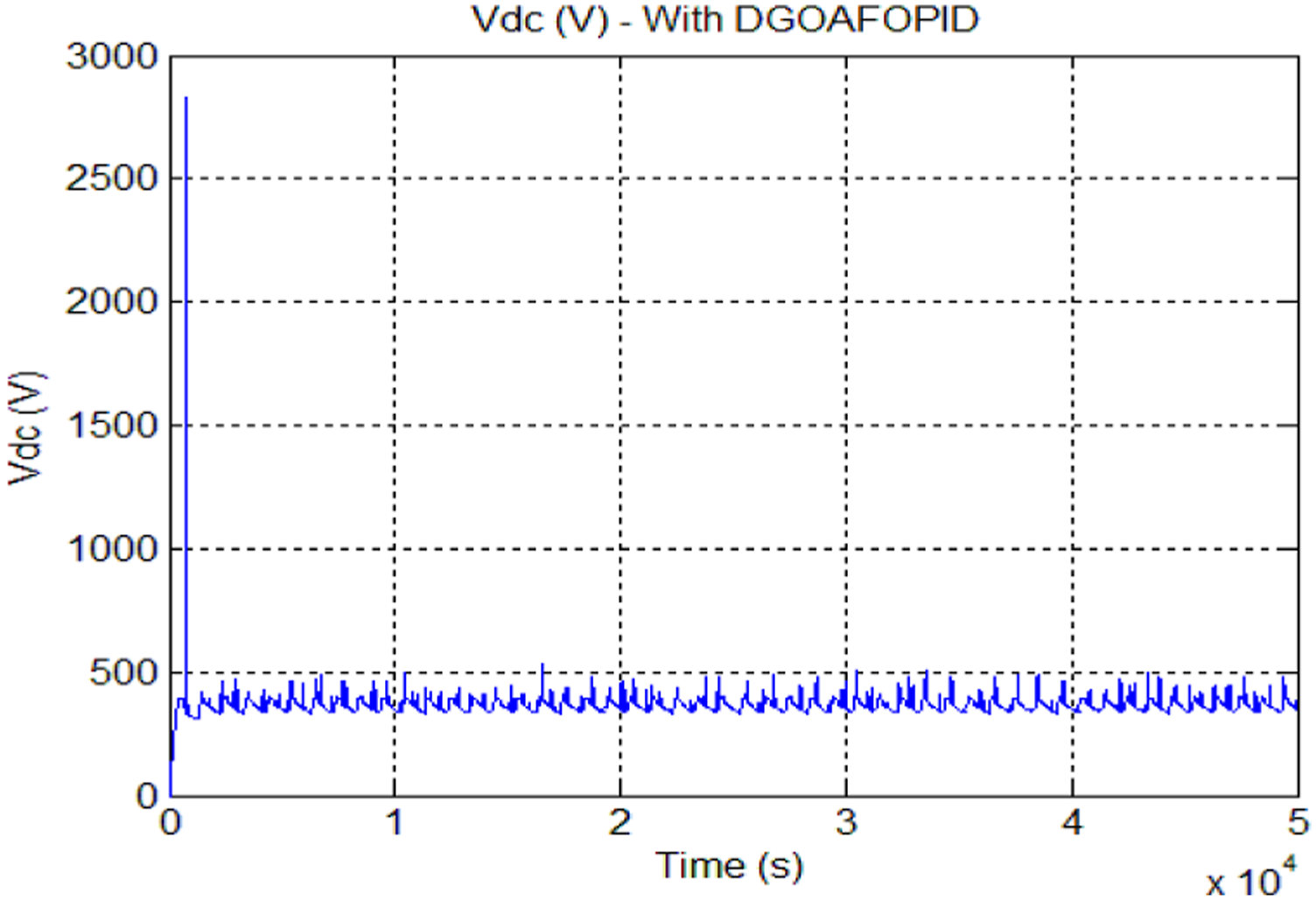
Torque curve for TRC using DGOA-FOPID is shown in Figure 11. In this instance, the torque increases in value somewhere at initial stage but then decreases to a steady state with very minor oscillations. It may be deduced from Figure 11 that the torque curve eventually reaches steady state since an abrupt large surge. By employing DGOA-FOPID to lower the steady state error, it can be seen that the suggested method gives greater TR adaptation due to DGOA-enhanced FOPID’s functionality. Torque reaction for tiny capacitor with DGOA-FOPID in BLDC motor control.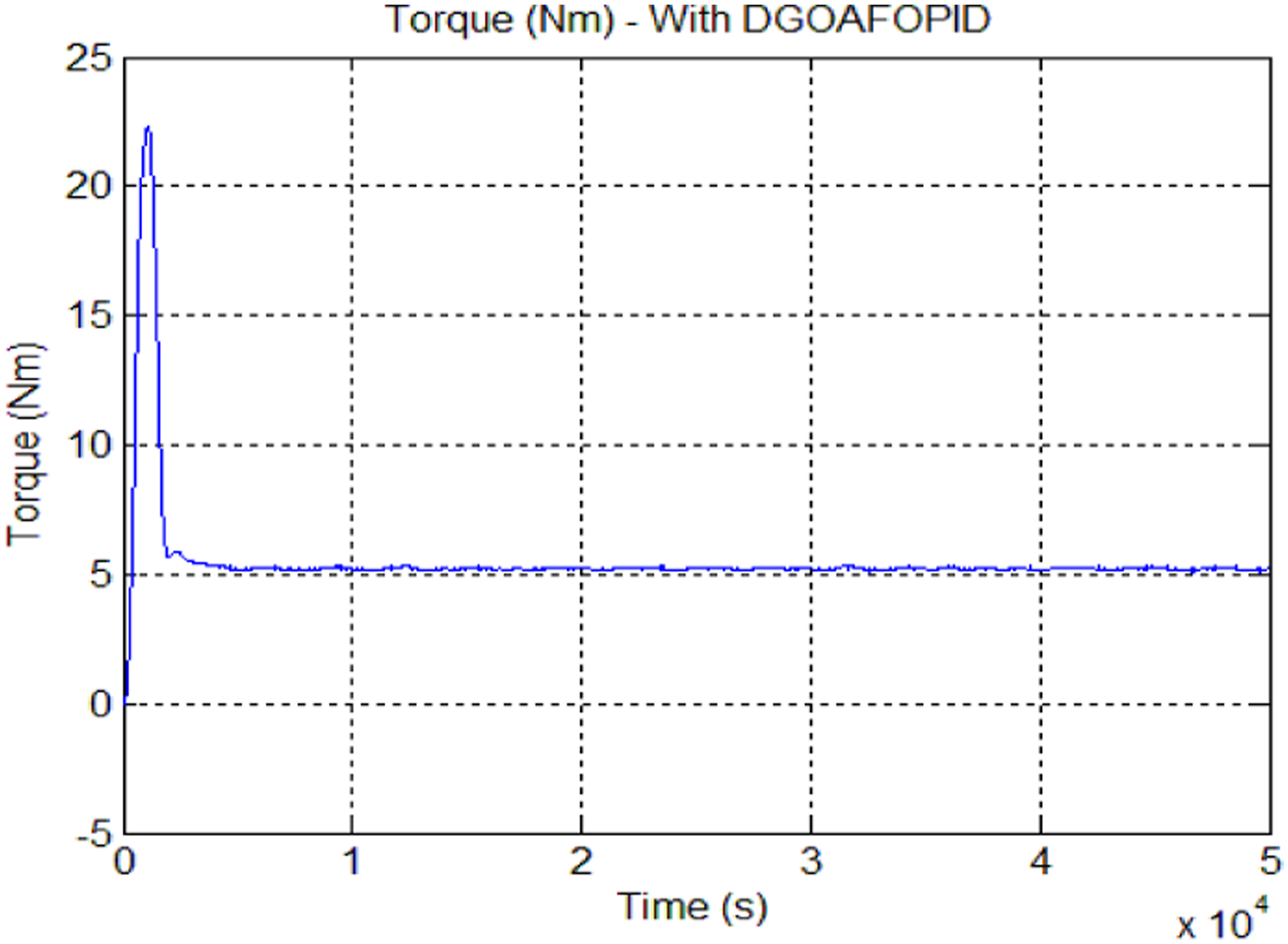
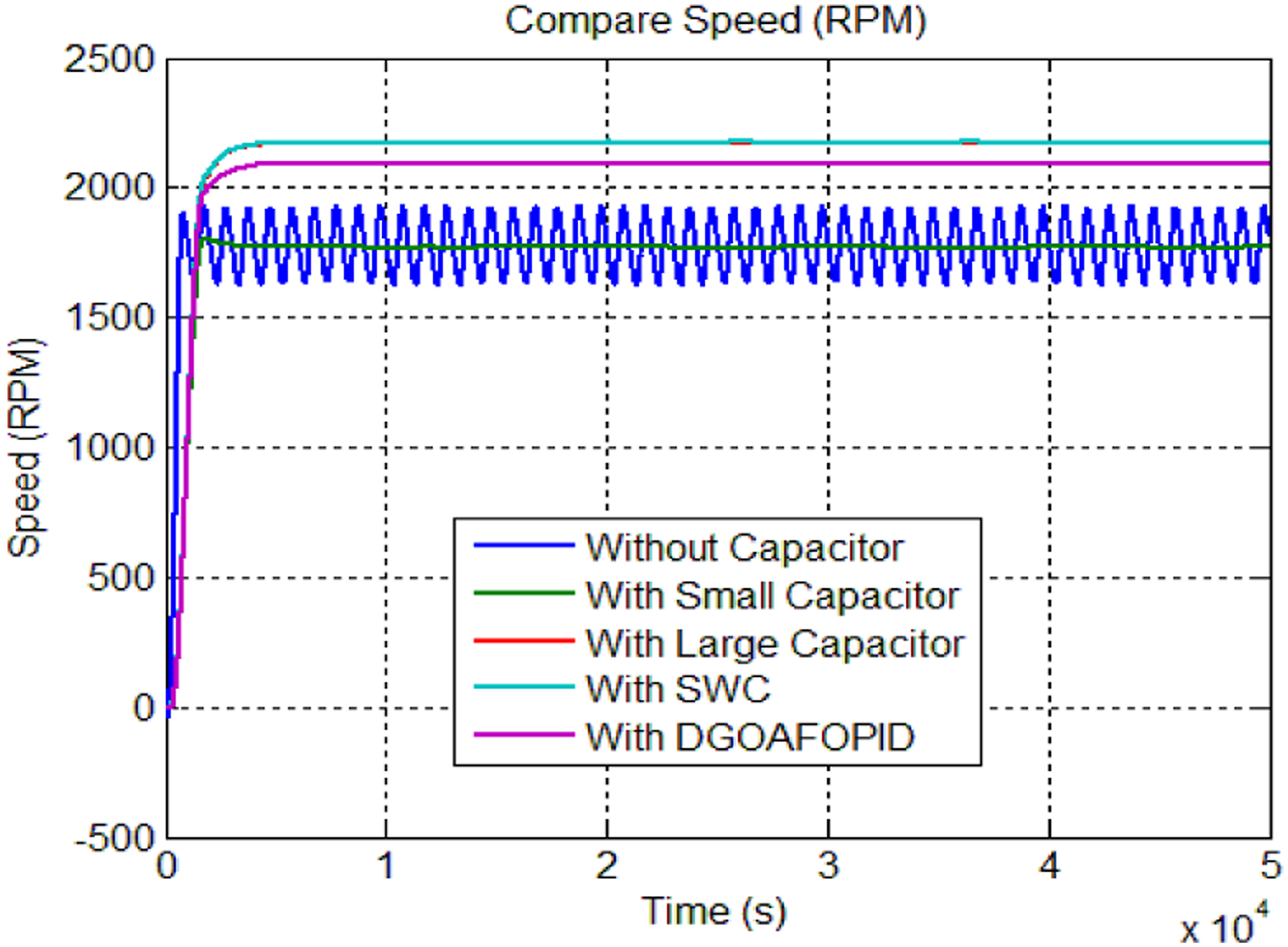
The fluctuation of the TRC’s motor speed with the DGOA-FOPID is shown in Figure 12. In this figure, the speed smoothly increases until it reaches the target value. The motor runs more smoothly as a result, as well as the level of functionality does not overshoot. With this entire controller, the steady state error is also decreased. Figure 13 compares the speed of response in various circumstances. Speed responsiveness for tiny capacitor BLDC motor drive DGOA-FOPID. Comparison of all approaches’ speeds using DGOA-FOPID.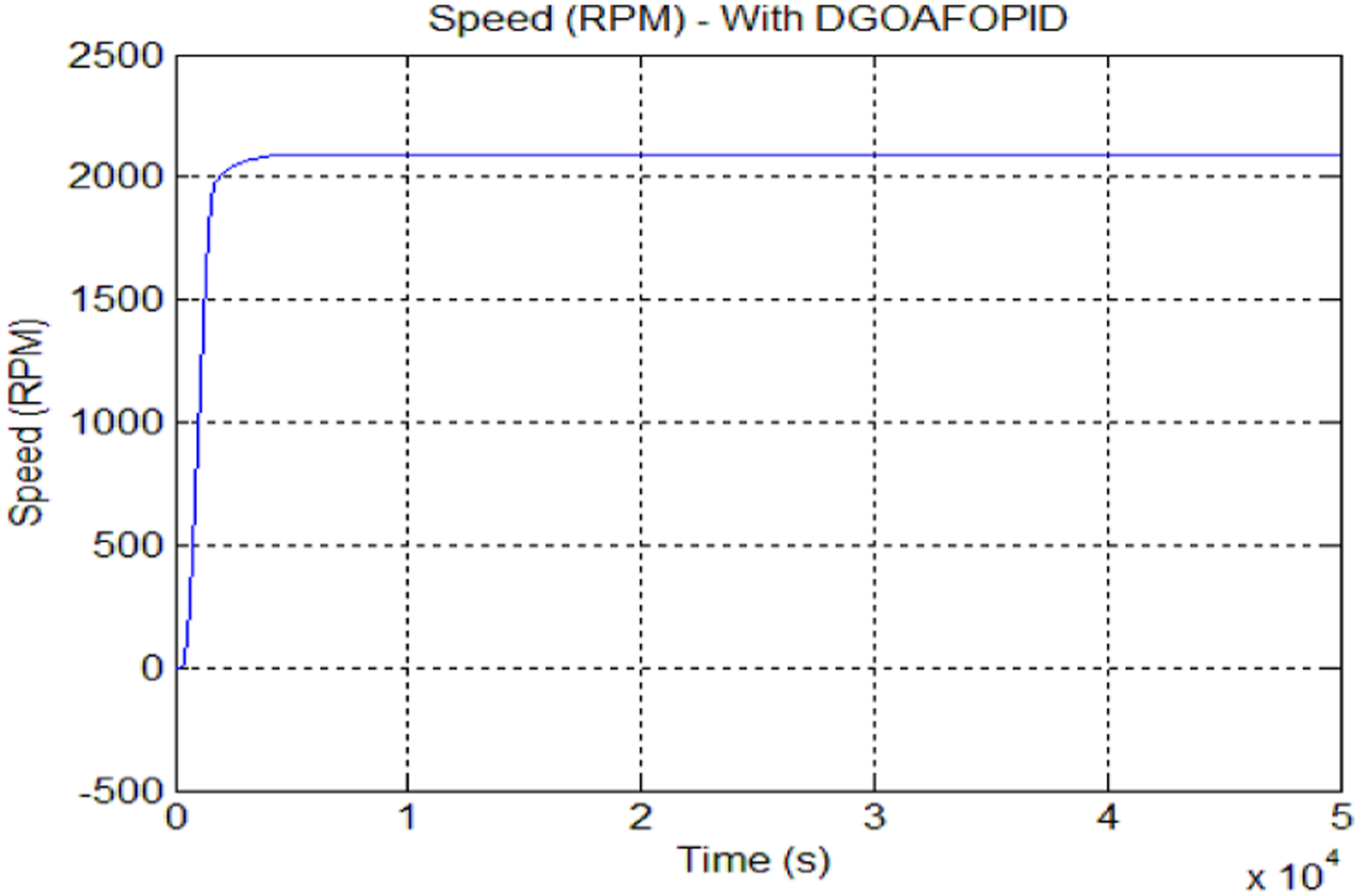
THD and TR comparison for various methods using DGOA-FOPID.
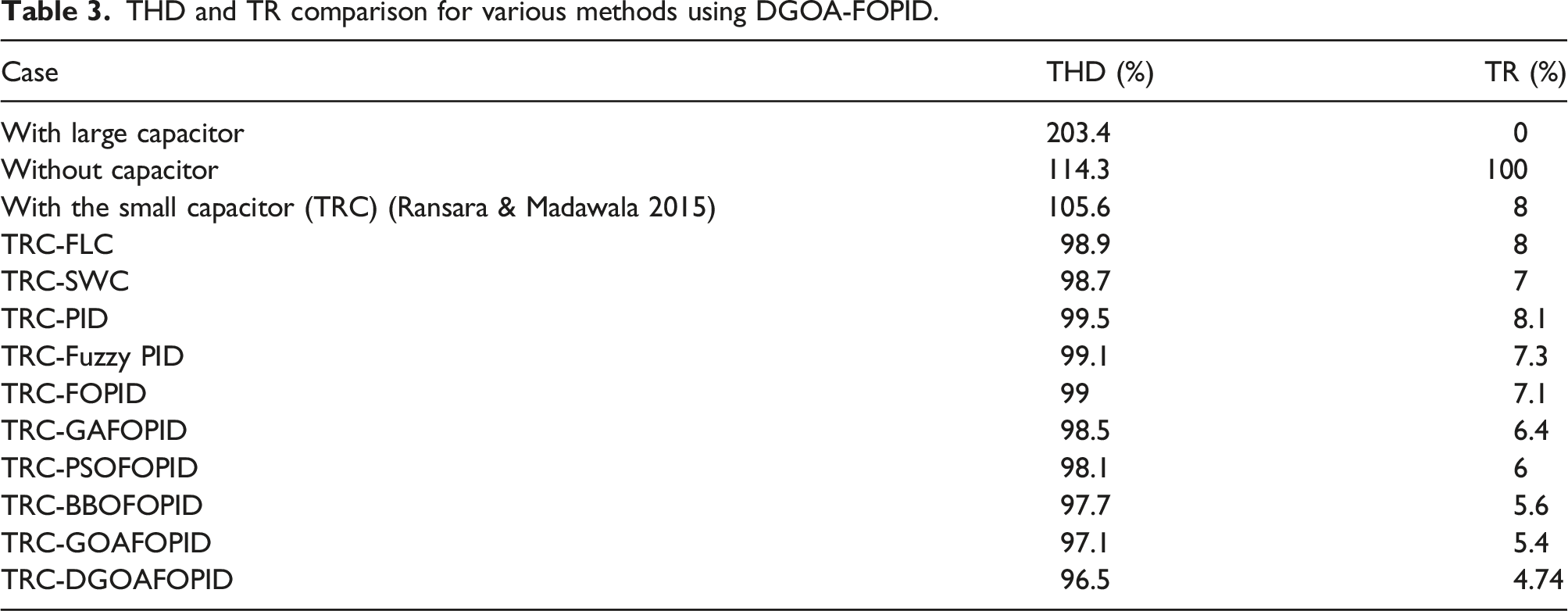
The torque ripples are fully eliminated whenever a huge capacitor-based drive is used, but they still remain if a DC link capacitor-based drive has not been used. Small DC link capacitor is used in the work of, 15 and it is found that there are 8% torque ripples prevalent. SWC is used in the proposed method to rapidly eliminate torque ripples; as a result, merely 7% of torque ripples are observed. When DGOA-FOPID is used in conjunction with TRC, TR decreases to 4.74% from 7.1% when conventional FOPID is used and from 5.4% while GOA-FOPID has been used.
Conclusion
In this research, a low-cost TRC technique-based capacitor-based drive for a BLDC motor has been implemented. Because it has more functionality than the traditional PID and FLC systems, the FOPID controller is used to implement the control approach. The fitness function is chosen to minimize the ITAE performance index in order to reduce error in the controller. The DGOA approach is used to best tune the controller’s parameters with the aim of achieving the fitness function’s minimal value. An adaptive parameter has been added to the conventional GOA method in order to enhance its performance, and the suggested DGOA’s effectiveness is examined using benchmark functions.
The outcomes show that the suggested OA approach performs better than the traditional GA, PSO, BBO, and GOA. The improvement in TRR is gained through the simulation of the driver using the suggested DGOA-FOPID, and speed control is explored. It is implied that the speed regulation has improved and that the torque ripple reduction has improved. Additionally, the proposed controller’s TR (%) is noted as it is contrasted with the traditional controllers. TR is lowered to 4.74% under the suggested plan. TR is decreased by 40.75% when compared to the low-cost capacitor-based BLDC drive with TRC approach given by Ransara & Madawala (2015). The TR is decreased by 32.286% in comparison to the initial work. 15
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.