
Abstract
In the flexible hoisting system, past research focused on the physical modeling without considering complex external environmental variables such as guided rails excitation and shaft effect, leading to a significant deviation between the physical model and the actual model. However, the physical modeling is difficult to model the actual dynamics of the rope strictly under the actual working conditions. This paper takes a high-speed elevator hoisting system as an example. A modified model combining the physical model and the data-driven model is proposed to mitigate the deviation between the physical model and the actual model. In the experiments, the vibration signals of the rope were extracted from images collected by a camera. A beat-like phenomenon of the vibration signals is discovered in the vibration signals of the rope during the acceleration stage. The experiment results demonstrate that the modified model can more accurately model the dynamics of the rope under the actual working conditions and reduce the absolute error of 75.9% compared with the physical model. The proposed model also provides a reference for the modification of the complex dynamic models.
Highlights
• A modified model combining the physical model and the data-driven model is proposed to mitigate the deviation between the physical model and the actual model via considering the excitation from the external environment. • The experiment results verify the validity of the proposed model. • We study the vibration characteristics of the hoist rope at the three stages (the acceleration ascent stage, uniform ascent stage, and deceleration ascent stage) during the ascending of the high-speed elevator. • It is observed that the vibration amplitude of the hoist rope changes periodically at the acceleration ascent and the uniform ascent stages of the high-speed elevator, which is a beat-like phenomenon.
Introduction
A hoisting system is a mechanical system used to raise and lower conveyances, which has been widely used in mining 1 and transportation2,3 such as mining cable elevators and elevators in high-rise buildings. The hoisting system consists of a traction machine, wire ropes, and guide rails. The vibration of the rope in the hoisting system has a significant impact on the performance of the hoisting system. For example, in the mining cable elevator, the vibration of the rope possibly causes premature fatigue fracture because of tension oscillations, resulting in safety accidents. 4 The hoist rope of the high-speed elevator runs at a high speed to lift the car to the destination quickly. The vibration of the rope will lead to the vibration and noise of the car, which affects passengers’ comfort.5,6 It is essential to suppress the vibration of the rope of the hoisting system to avoid these harmful situations. Therefore, it is of great significance to establish an accurate dynamics model of the hoisting system and study the vibration characteristics of the rope, which provides a basis for vibration suppression of the rope.
Based on Hamilton’s principle, He et al. established a dynamic model of the hoist rope with variable length and speed. 7 Yang et al. established a dynamic model to study the coupled vibrations between the building and the elevator ropes, and validated the proposed dynamic model by an experimental testbed. 8 Santo et al. established the three-degree-of-freedom vibration differential equation of the high-speed elevator system based on the Lagrange equation. 9 Wu et al. established the transversal vibration dynamic model of the steel rope of the hoisting system, and obtained the transverse vibration displacement of the rope at a point in the rope under the sine excitation at the end of the rope. 10 It concluded that the transverse vibration frequency increases when the length of the rope reduces. Guo et al. investigated the nonlinear dynamic responses of the rope under periodic excitation in the hoisting system with experiments of different periodic excitation frequencies. 11 The results indicated that the transverse vibration of the rope is a forced vibration under the excitation, while the longitudinal vibration is a random vibration. Nevertheless, in these studies, the excitation input to the dynamic model is a hypothetically ideal signal, which is different from the actual excitation from the external environment.
Hiroyuki et al. presented a solution to the forced vibration by wind force of the rope with moving ends with a series of assumptions and verified the validity using finite difference analyses. 12 Wu et al. employed ANSYS FLUENT 14.5 to study the vibration of the rope of conveyances under different speeds of ventilation air. 13 The results indicated that the ventilation affected the horizontal displacement of conveyance greatly. However, this research simulated the effect of different ventilation air speeds on the rope without experimental verification.
The actual excitation from the external environment is rarely considered while modeling the hoisting system in the previous studies. It is difficult to mathematically describe the actual and complex excitation from the external environment. As a result, the physical model is not accurate enough to be employed to control the hoisting system and suppress the vibration of the hoist rope. Hence, a data-driven model—Long Short-Term Memory (LSTM) is put forward to describe the external excitation from the external environment such as guided rails excitation and shaft effect. This paper takes a high-speed elevator hoisting system as the research object, which is a typical time-varying length rope hoisting system. A modified model combining the physical model and the data-driven model is proposed. The experiments in the elevator test tower were conducted and the vibration data was recorded to train the LSTM network and verify the modified model.
The main contributions of this work are summarized as follows. • We study the vibration characteristics of the hoist rope at the three stages (the acceleration ascent stage, uniform ascent stage, and deceleration ascent stage) during the ascending of the high-speed elevator. It is observed that the vibration amplitude of the hoist rope changes periodically at the acceleration ascent and the uniform ascent stages of the high-speed elevator, which is a beat-like phenomenon. • A modified model combining the physical model and the data-driven model is proposed to mitigate the deviation between the physical model and the actual model via considering the excitation from the external environment. The experiment results verify the validity of the proposed model.
The remainder of the paper is organized as follows. In Section “physical model of the hoisting system”, the model is built according to Hamilton’s principle and solved by the Galerkin algorithm. A modified model is built using the LSTM in Section “modified model of the hoisting system”. Section “experiments and results” describes the experiment process, data processing, and analysis. At last, some conclusions are obtained.
Physical model of the hoisting system
The hoisting system modeling method is mainly divided into two categories. One is the discrete modeling method which is equivalent to a long rope into several sections of spring-damper element (SP-D)
14
shown in Figure 1(a). (a) Discrete modeling; (b) distributed parameter modeling; (c) the simplified physical model of the hoisting system.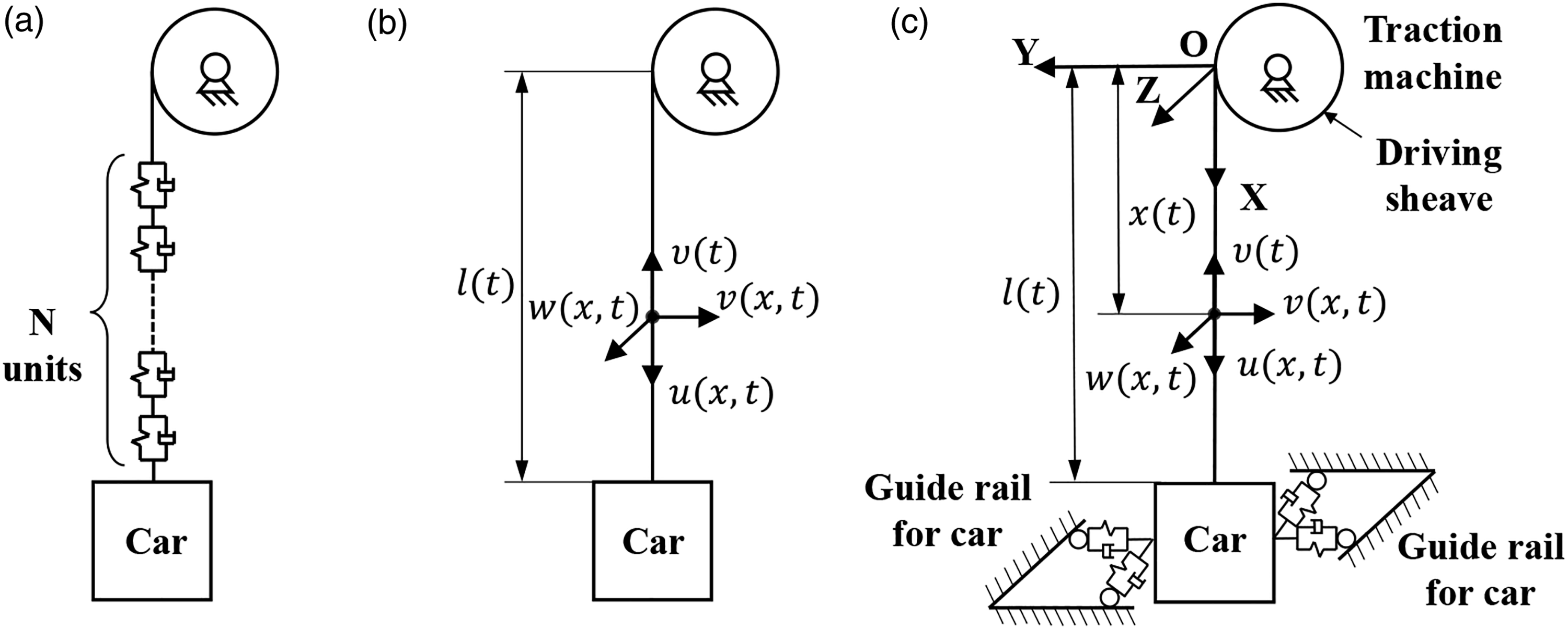
This method ignores the continuum characteristics of the rope and is unable to present such dynamic characteristics as unsteady characteristics caused by the external excitation including nonlinear vibration, transverse vibration in the process of rope movement. The other is distributed parameter modeling method using partial differential equations (PDE) which have continuum characteristics in space and time to describe the rope dynamics 15 shown in Figure 1(b). Compared with the former modeling method, the latter can better consider the flexible and long rope movement. The continuity of the hoist rope cannot be ignored because of the long length and the high speed of the hoist rope of the high-speed elevator installed in skyscrapers. For this reason, much research established rope models with this method.16–18 Thus, this paper builds the physical model using the distributed parameter model.
This paper adopts the modeling method proposed by Bao,
19
which is comprehensive to express the physical model of the hoisting system. This paper pays more attention to the method of considering the excitation, since the physical model has been adopted directly. The model is depicted in Figure 1(c). The tangent point of the driving sheave and the hoist steel rope of the elevator is selected as the origin of the coordinate system in the model. The system consists of the car, the guide shoes, and the guide rails, which is equivalent to a SP-D system. The coupling effect of longitudinal and transverse vibration of the hoist steel rope and the influence of flexible deformation of the hoist steel rope are considered. The model is based on three assumptions: (1) The elastic deformation caused by longitudinal and transverse vibration of the hoist steel rope is much less than the length of the rope and the stress does not exceed its elastic limit and the plastic deformation of the rope is subject to Hooke’s law. (2) The hoist steel rope is continuous, homogeneous, and isotropic. The elastic modulus, linear density, and cross-section area are invariant. (3) Regardless of friction.
The displacement vector R at any point

The velocity vector

According to equation (1), the car displacement vector

According to equation (2), the car speed vector

Thus, the kinetic energy of hoisting system is

At any time

Thus, the elastic potential energy



here the subscript “
The gravitational potential energy of the hoisting system is

The virtual work of lateral damping forces in the lifting system is

The hoisting system is a non-conservative system. Based on Hamilton’s principle, the system motion at the two moments of

Substitute the kinetic energy, elastic potential energy, gravitational potential energy, and virtual work of hoisting system into equation (12) and obtain the longitudinal vibration equation


So far, the physical model of the elevator hoisting system is completed. It would be solved by the Galerkin algorithm and the process is showed in Appendix.
Modified model of the hoisting system
The physical model can only output the excitation responses from the ideal signal such as sinusoidal signal, which cannot obtain the response of other excitation from external environmental variables. Therefore, it is essential to build a modified model which can respond to these excitations. The vibration signal obtained from the experiment is the system response of the actual excitation, including the excitation from the external environment. On the basis of this, we put forward a modified model based on the LSTM to supplement the excitation response from the external environment. The modified model shown in Figure 2 uses a sequence of time-varying correction coefficients to correct the deviations between the physical model and the actual model. According to the historical-kinematic parameters (velocity, acceleration, etc.) of the rope, the modified model based on the LSTM can output a correction coefficient of the next moment to obtain a more accurate response signal. The modified model.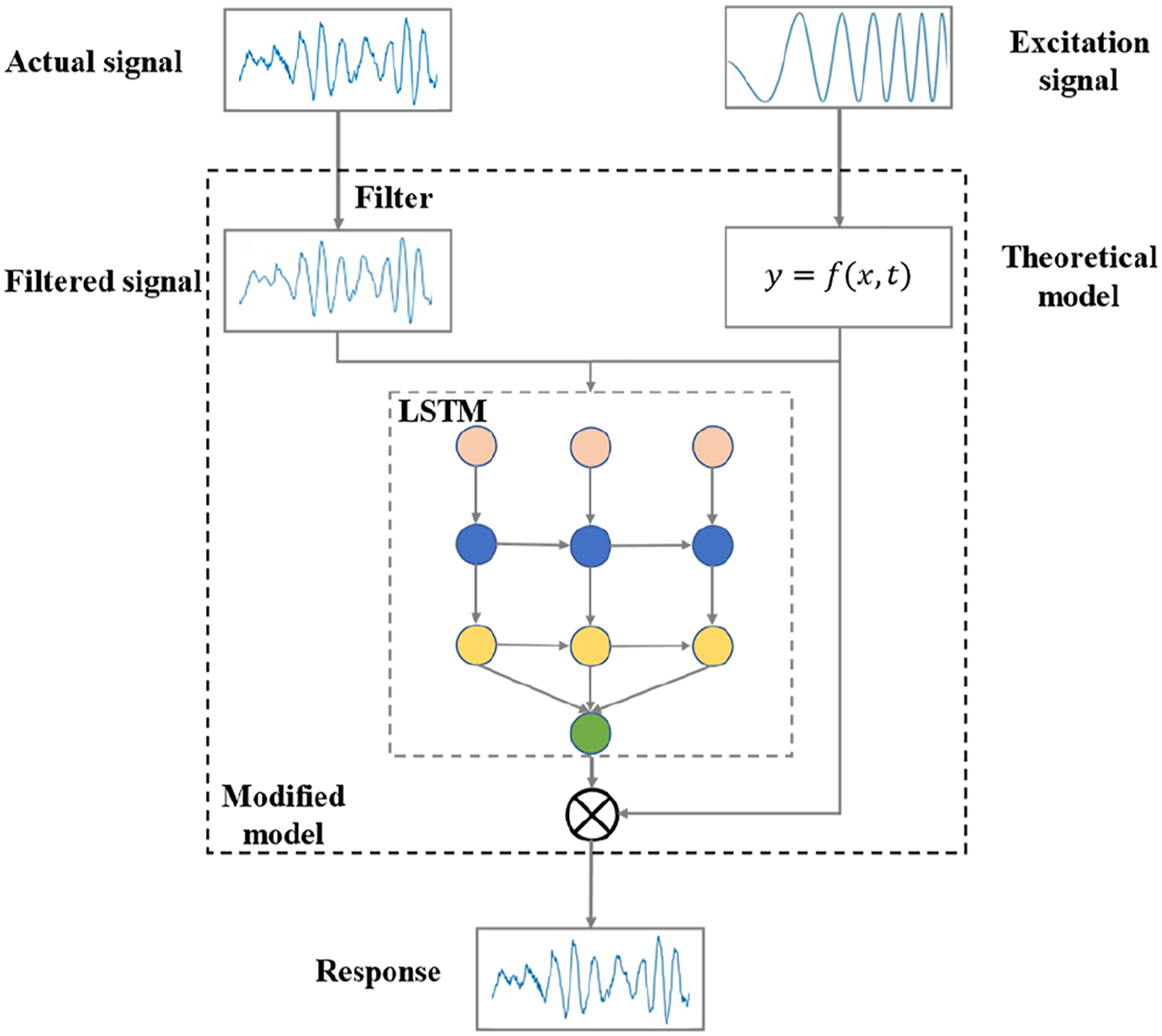
LSTM
Deep learning has been widely used in engineering field due to its powerful expression ability.20–22 LSTM 23 is a Recurrent Neural Network (RNN) 24 architecture widely used in deep learning. Compared with the RNN, LSTM can store long-term sequence information more conveniently. By this, LSTM is widely used in the application field of sequence information, such as natural language processing and speech recognition. 25
Long short-term memory has a chain-like repeating network structure similar to RNN. The difference is that the repeating network of LSTM has four interaction layers, as shown in the Figure 3. In the Figure 3 and the equations (15)–(19), A cell structure of long short-term memory.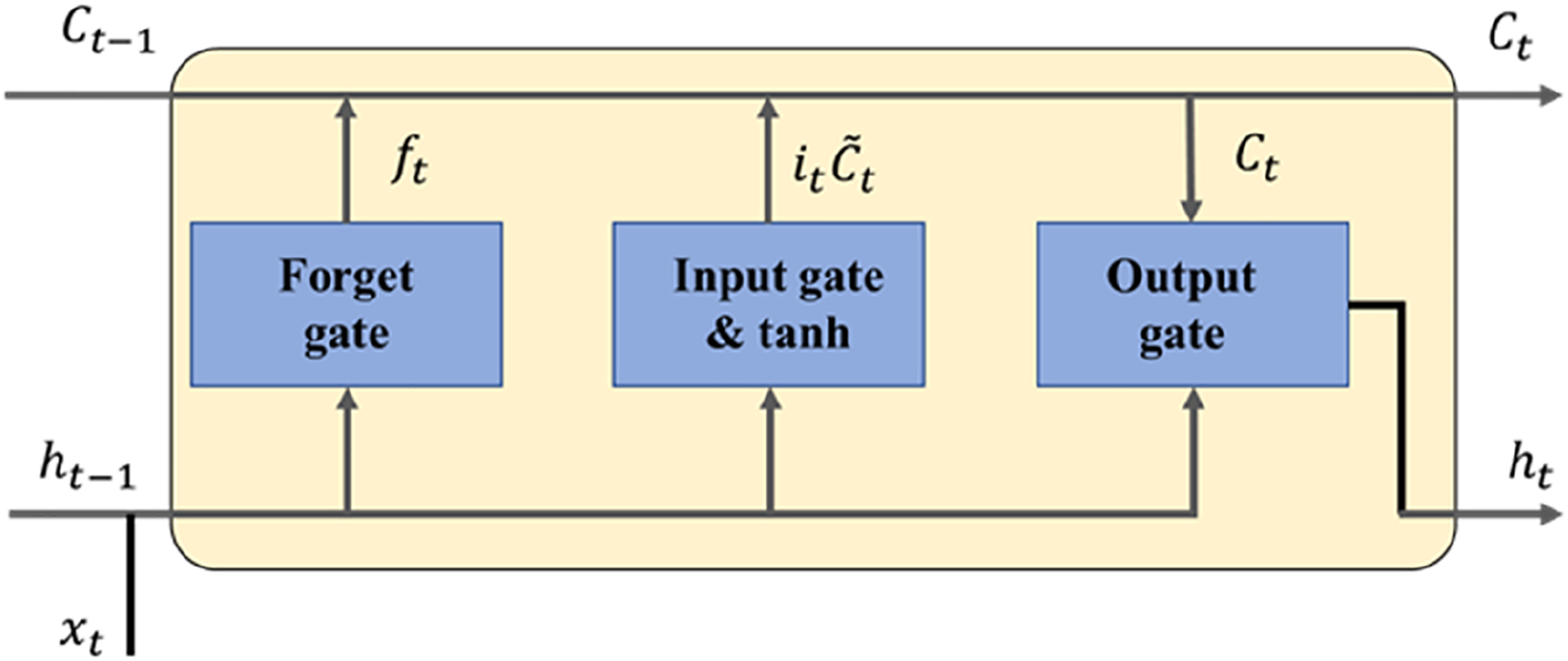
Gates in the interaction layer can partially delete the processor state of the previous step and add new information to the current step’s processor state based on the previous step’s hidden state and the input of the current step. The input to each repeating network includes the hidden state and processor state of the previous step as well as the input variables of the current step. The processor state is updated based on the calculations of the four interaction layers. Finally, the updated processor state and implicit state form the output and are passed to the next step.
The first interaction layer in the LSTM is called the “forgetting gate layer,” which determines what information is forgotten by the current step. The “forgetting gate” is shown in equation (15). The output

The second interaction layer, called the input gate layer, determines what new information should be added to the processor state. “Input gate” is described by equation (16). The output

The third interaction layer is the “tanh” layer, which creates a new candidate value that can be added to the processor state. The result of this layer is calculated according to equation (17)

According to equation (18), the old processor states

The last layer is called “output gate layer,” which generates the output value of LSTM based on the updated processor state, as shown in equation (19)

Definition of modified model
It is assumed that the actual signal can be obtained by scaling up the simulation signal

According to equation (20),

Considering that zero points of

Experiments and results
In the following part, we firstly verify the accuracy of the theoretical solution of the model built in Section 2 and conduct experiments in the elevator test tower. We find that there is a deviation between the theoretical solution and the actual signals obtained from a camera. To further bridge this deviation, the modified model is established using a hybrid approach in Section 3 and testified in Section 4.4. The results demonstrate the validity of the modified model.
Experimental setup
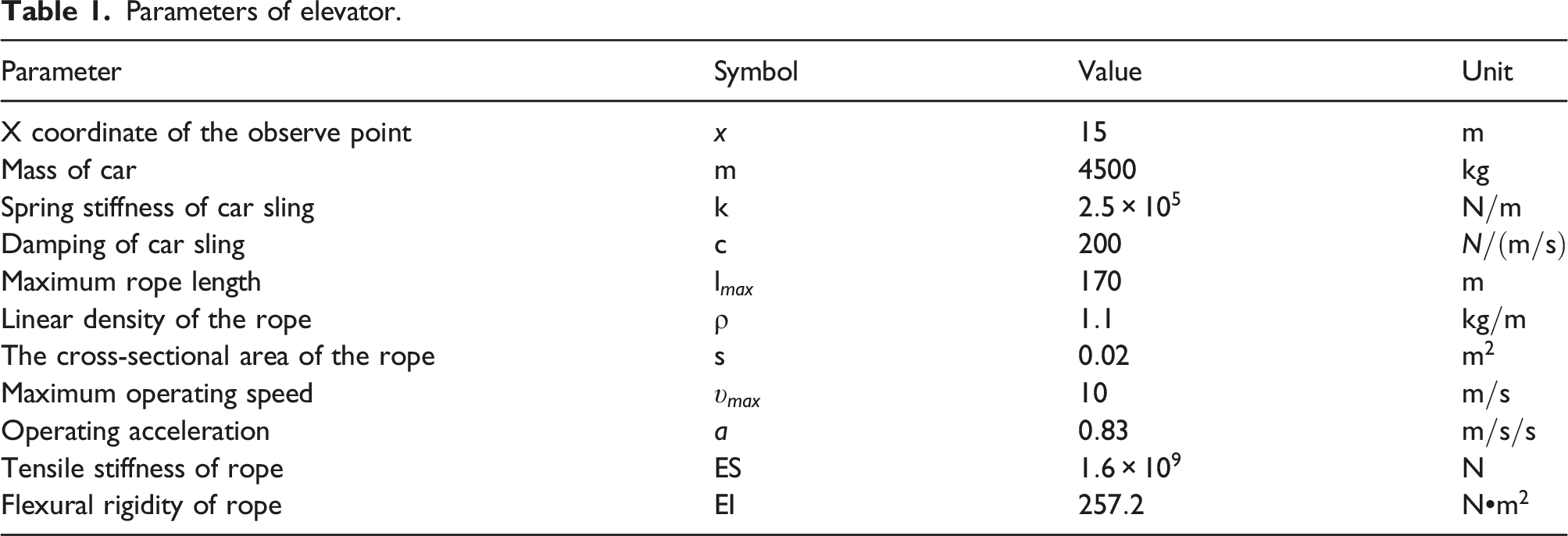
The experiment was carried out in the elevator test tower. An industrial camera with a resolution of (a) Elevator test tower; (b) experimental facility; (c) EVA625 in the car; (d) schematic diagram of the experimental facility; (e) Speed and acceleration curve of the elevator; (f) The structure diagram of the driving sheave.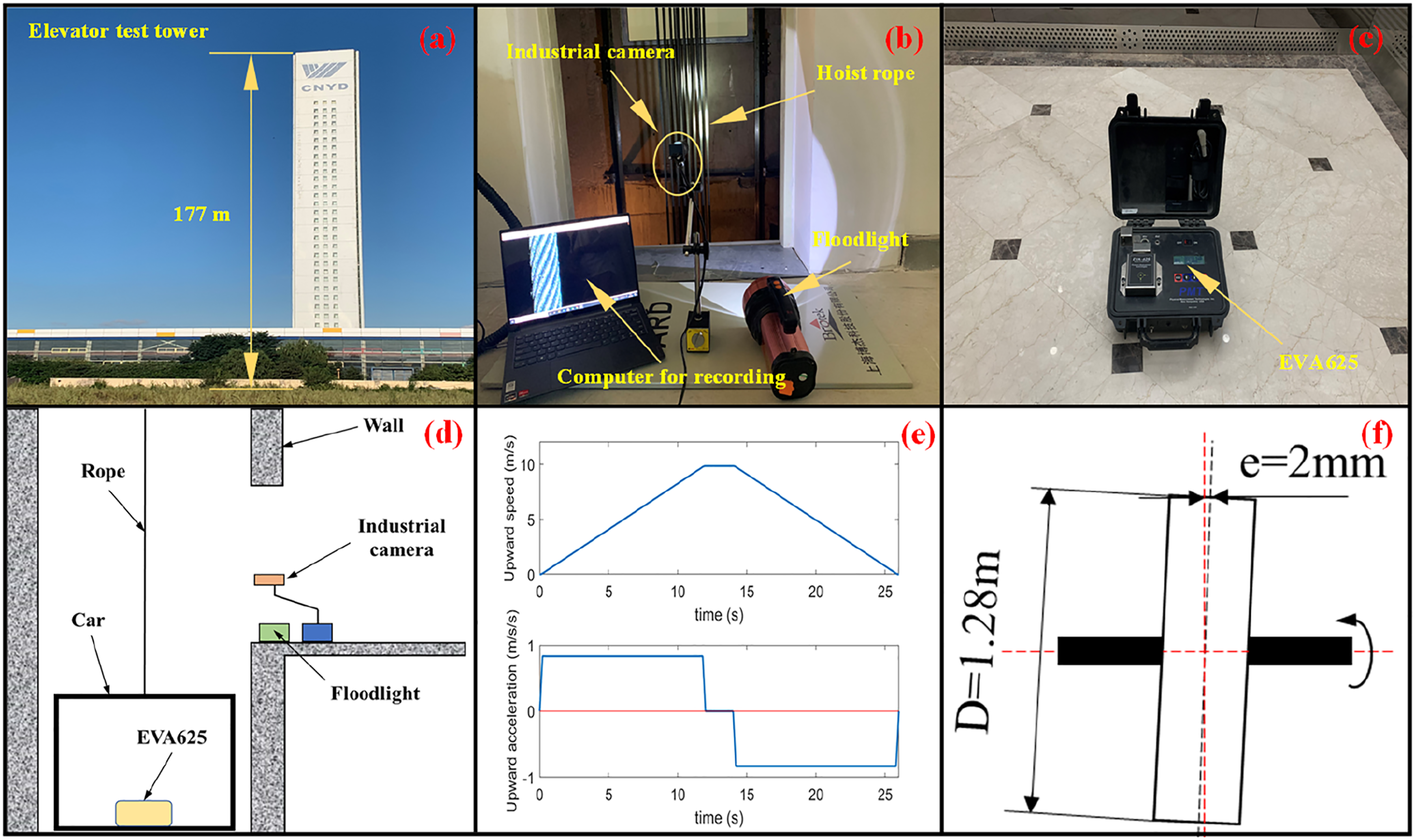
Parameters of elevator.
Vibration signal extraction
Each experiment last for 26 s. The industrial camera got 1560 frames each experiment. Every RGB image was converted into a grayscale image first and then the grayscale image was transformed into a binary image. The edges of the hoist rope in the grayscale image were detected by Sobel operator.
26
The intersection of the straight horizontal line, Y = 240, and the left edge of the rope in the image (Figure 5(c)) was selected as the observation point from which all the vibration signals were extracted. The intermediate results of image processing are shown in Figure 5. (a) Original image got from the industrial camera; (b) grayscale image; (c) the envelope edge extracted with Sobel operator and the position of vibration observation point.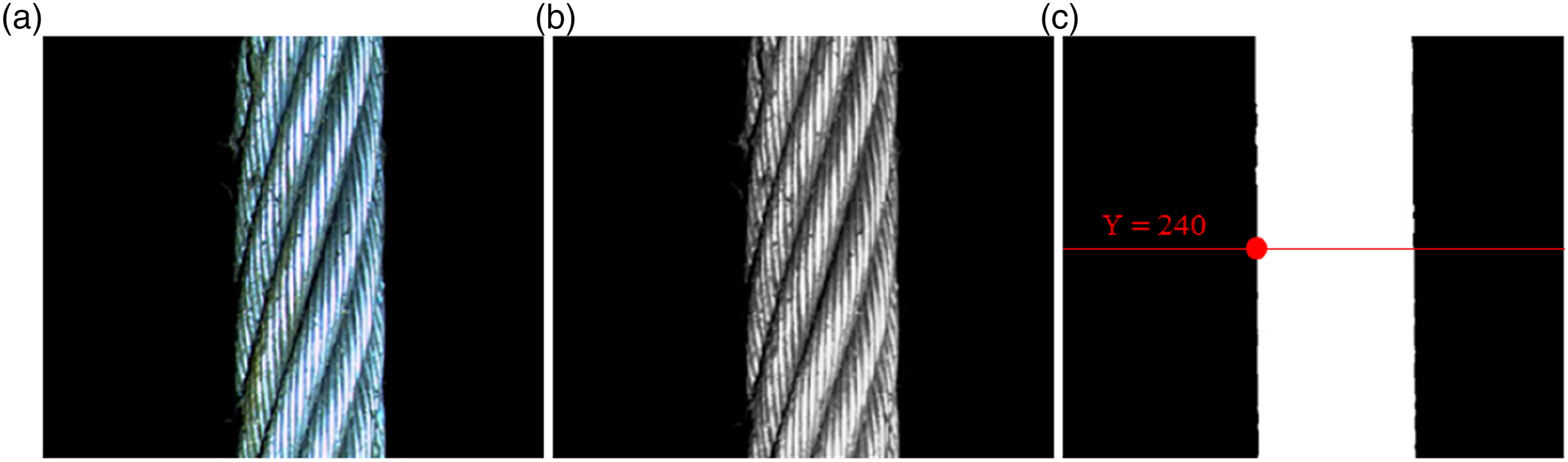
It should be noted that the displacement data from the observation point was the pixel coordinates in every image, so a proportional coefficient that translated it into the actual displacement was necessary. For convenience and accuracy, the steel rope in the images was taken as the reference of displacement. 100 images were chosen randomly to calculate the proportional coefficient. The average distance 
The vibration signal after image data extraction is shown in Figure 6(a). (a) Actual vibration signal; (b) The actual signal and low-frequency signal extracted from the actual signal; (c) The phenomena like beat.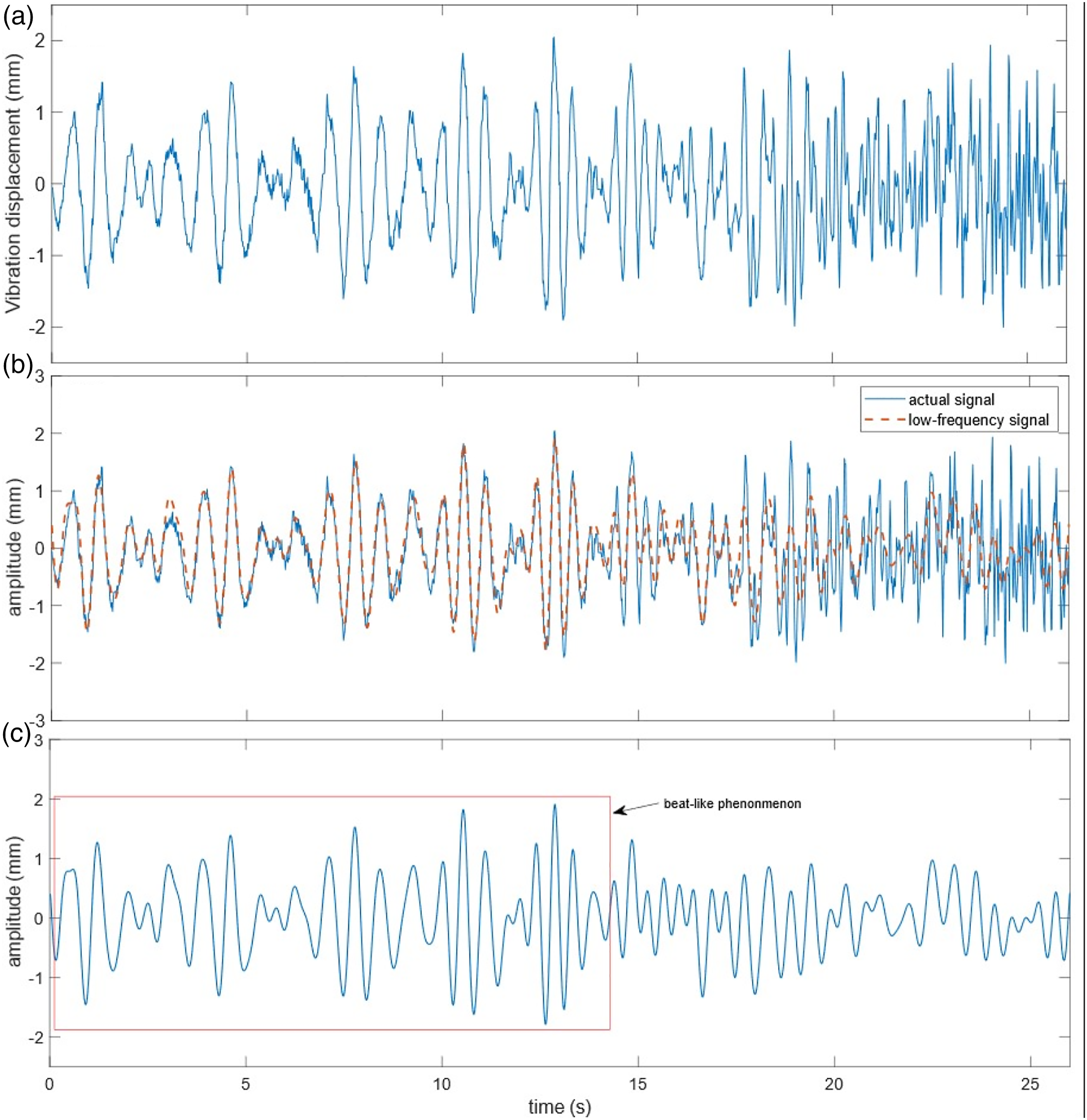
Validation of the physical model
A known excitation 
The maximum speed of the elevator is 
The excitation from the driving sheave is an input to the physical model to obtain the simulation results, which is used to compare with the real vibration signals to verify the accuracy of the physical model. The excitation signal from the driving sheave and the simulation signal are shown in Figure 7(a). (a) Excitation signal and physical model simulation results; (b) actual signal and physical model simulation results.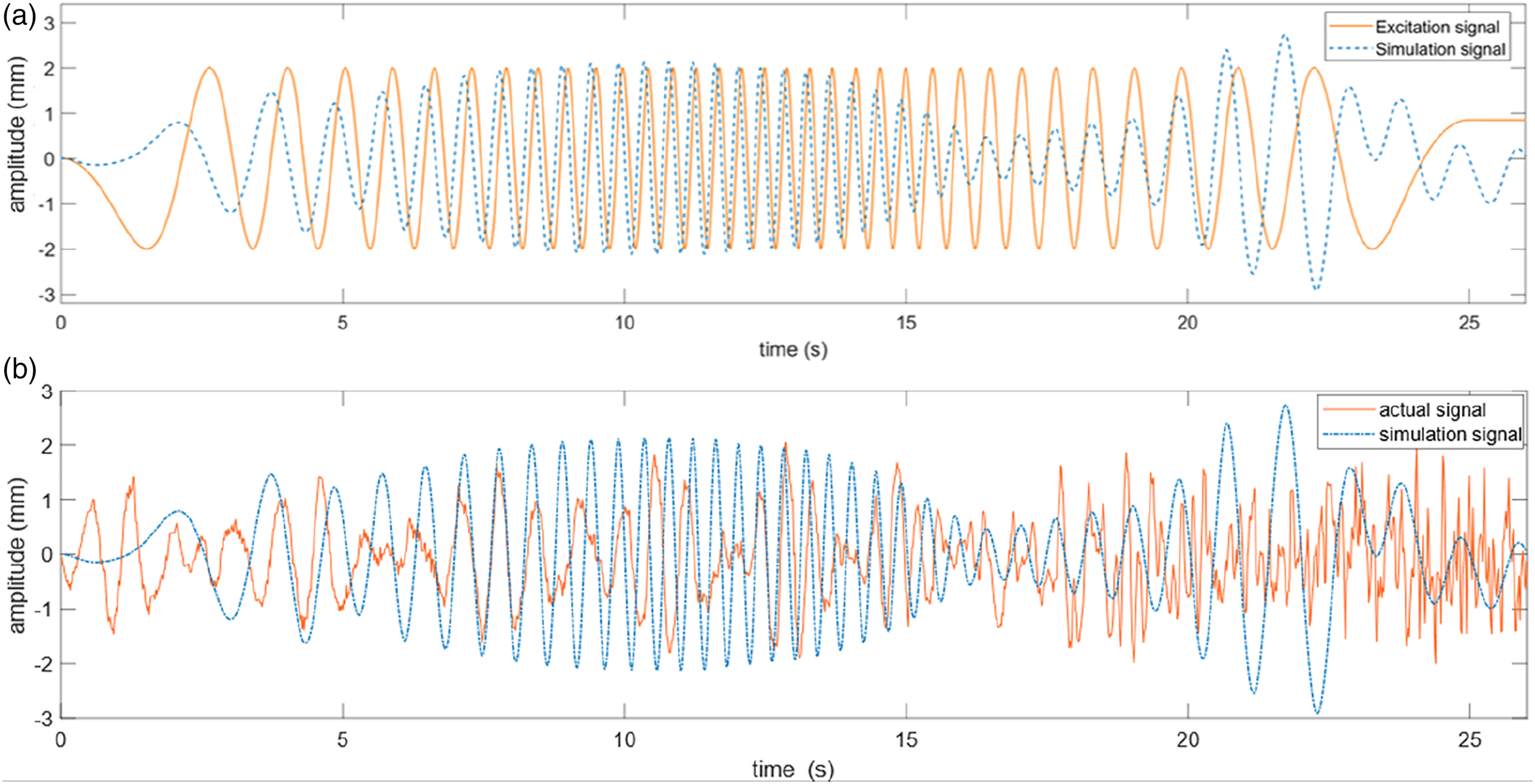
Comparing the simulation result and the actual signal, it can be found from Figure 7(b) that the response of the hoist rope caused by the excitation from the driving sheave has a large deviation from the actual vibration signal. This is because the physical model had not considered the complex external environmental variables, such as the shaft effect and guide rails excitation. Hence, we propose a modified model of the rope dynamics of the flexible hoisting system considering external environmental variables to decline the deviation.
We extract the frequency components lower than 2.488 Hz of the spectrum and perform the inverse Fourier transform to obtain the low-frequency signal in the time domain. The result is shown in Figure 6(b).
According to the equation (26), cumulative error rate curve between the low frequency signal extracted from the original signal and the original signal Cumulative error rate curve.
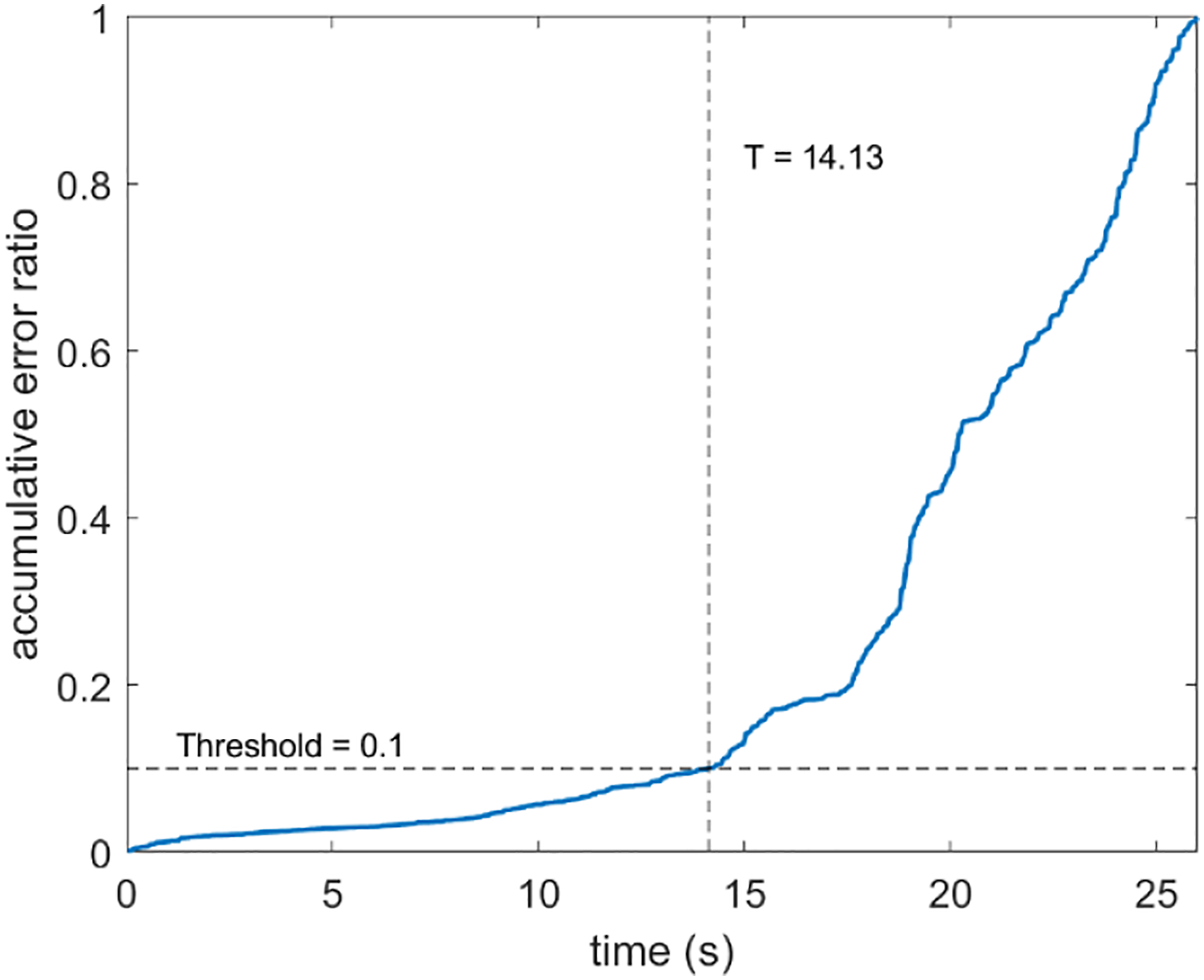
The cumulative error rate curve shows that the calculative error rate is up to 0.1 at 14.13 s, exceeding the error threshold between the low-frequency signal and the original signal. From Figure 6(b), we find that the low-frequency signal matches the original signal well before approximately 14 s, which is in the acceleration and uniform ascent stage. However, the deviation between the low-frequency signal and the original signal increases rapidly after 14 s, which is in the deceleration ascent stage. This phenomenon demonstrates that the frequency components of the vibration of the rope are different in the acceleration and uniform ascent stages and deceleration ascent stage. Therefore, we transform the signals at these stages using Fast Fourier Transform to get the amplitude-phase spectrums shown in Figure 9. (a) Spectrum of the vibration signal (b) Spectrum of vibration signal at 0–14 s (c) spectrum of vibration signal at 14–26 s.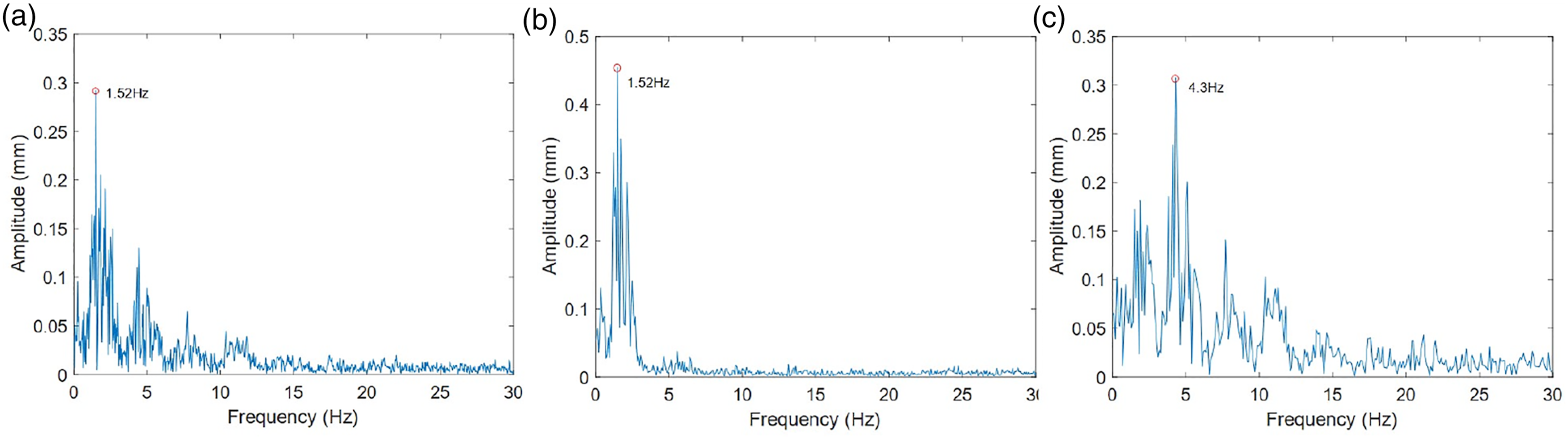
It can be found that in the acceleration and uniform ascent stage (0–14 s) of the high-speed elevator, the vibration of the hoist rope is mainly composed of the low-frequency components, which are below 3 Hz. In the deceleration ascent stage(14–26 s), the vibration of the hoist rope is mainly composed of the high-frequency components, which are distributed at a wide range of frequencies higher than 4 Hz (although there is still a minor constituent of frequency below 4 Hz). A similar phenomenon that the frequency is changed in different periods when the elevator rises was discovered by simulation in reference. 19 The reason is that when the length of the hoist steel rope becomes shorter, the energy of vibration of the hoist steel rope will accumulate to the rest shorter rope and cause the high frequency and significant amplitude vibration of the rope. At the same time, an interesting and unexcepted phenomenon is found that in the acceleration stage and uniform speed stage in the elevator ascending process, a phenomenon that like a beat (Figure 6(c)) exists in the vibration signal of the rope, and this is not mentioned in the previous studies about the hoist steel rope ascending process.
Validation of the modified model
The instantaneous length of the rope
Structure of LSTM network.

Model predicted result evaluation.

According to equation (22), the modified hoisting system model is
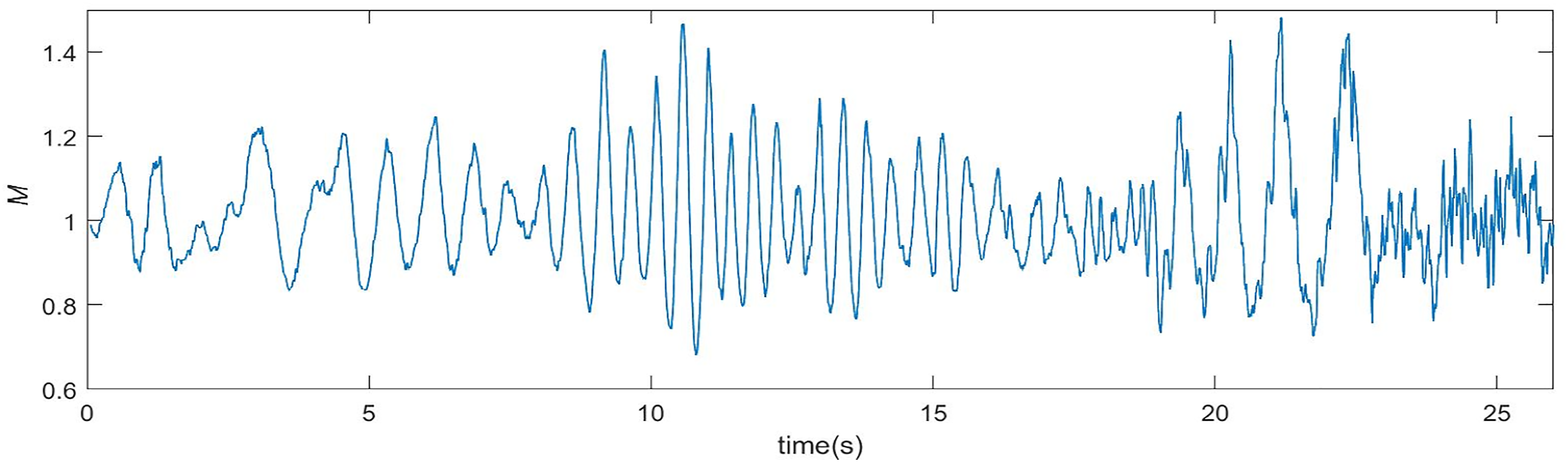
The physical simulation result obtained with the modified model is shown in Figure 10, and the curve of the correction coefficient The simulation results from modified model based on long short-term memory. Correction coefficient M.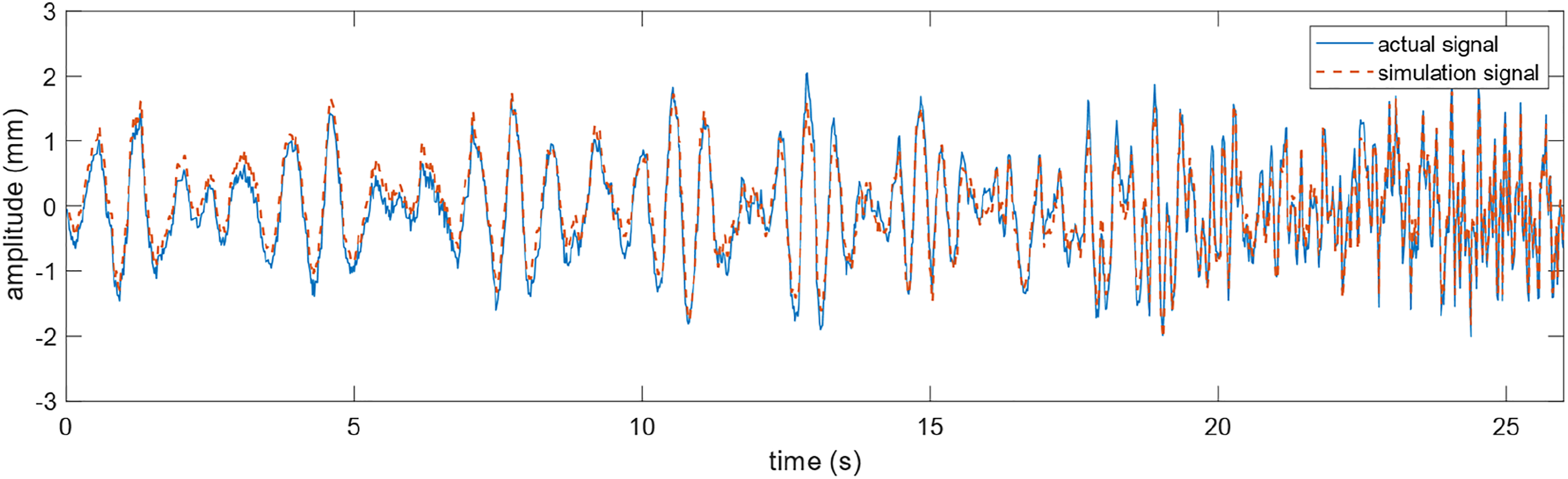
The simulation results obtained by the modified model are significantly improved compared with the previous physical model. The cumulative absolute error is chosen as the evaluation index, the formula is (a)The predicted result of 
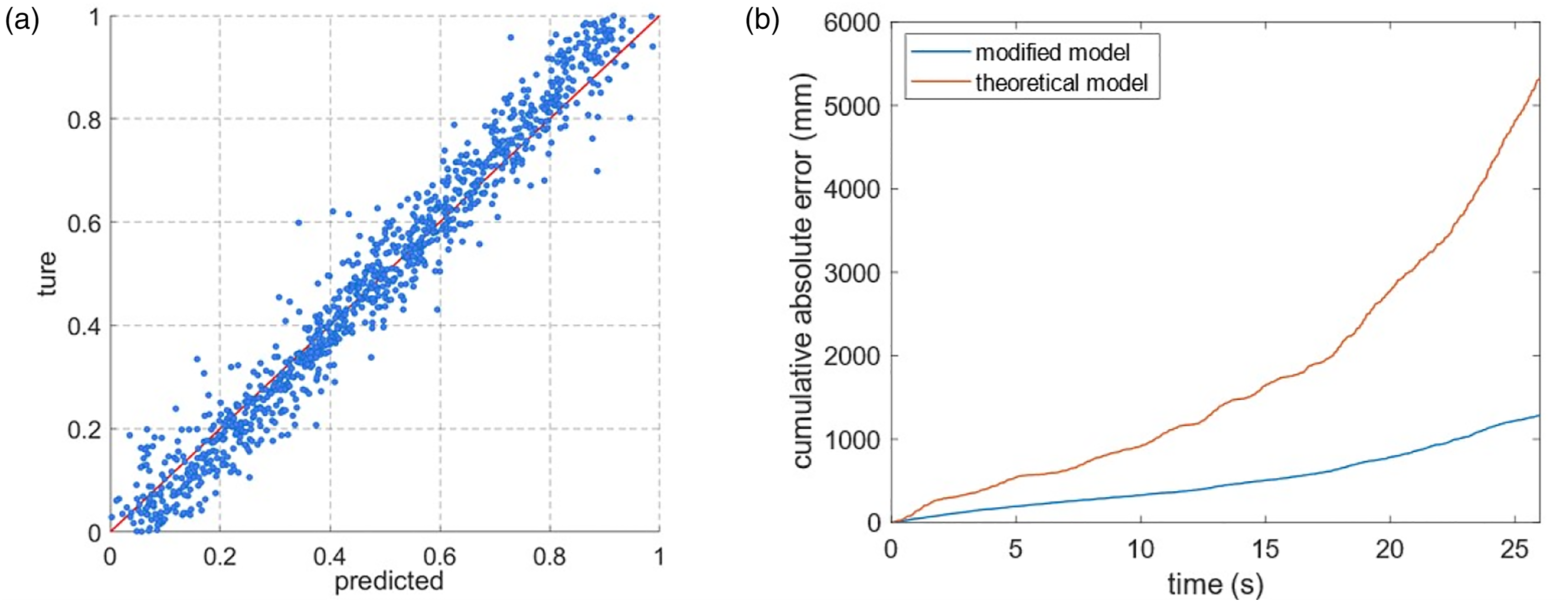
Overall, the absolute error of the simulation results obtained by the modified model decreases by 75.9% compared with the previous physical model. In order to test, the modified model can be used under different operating parameters, we changed the weight of the car by adding 640 Kg counterweights. The simulation signal from modified model and the actual signal are shown in Figure 13, the absolute error decreases 75.3%. The simulation results from modified model in another operating parameters.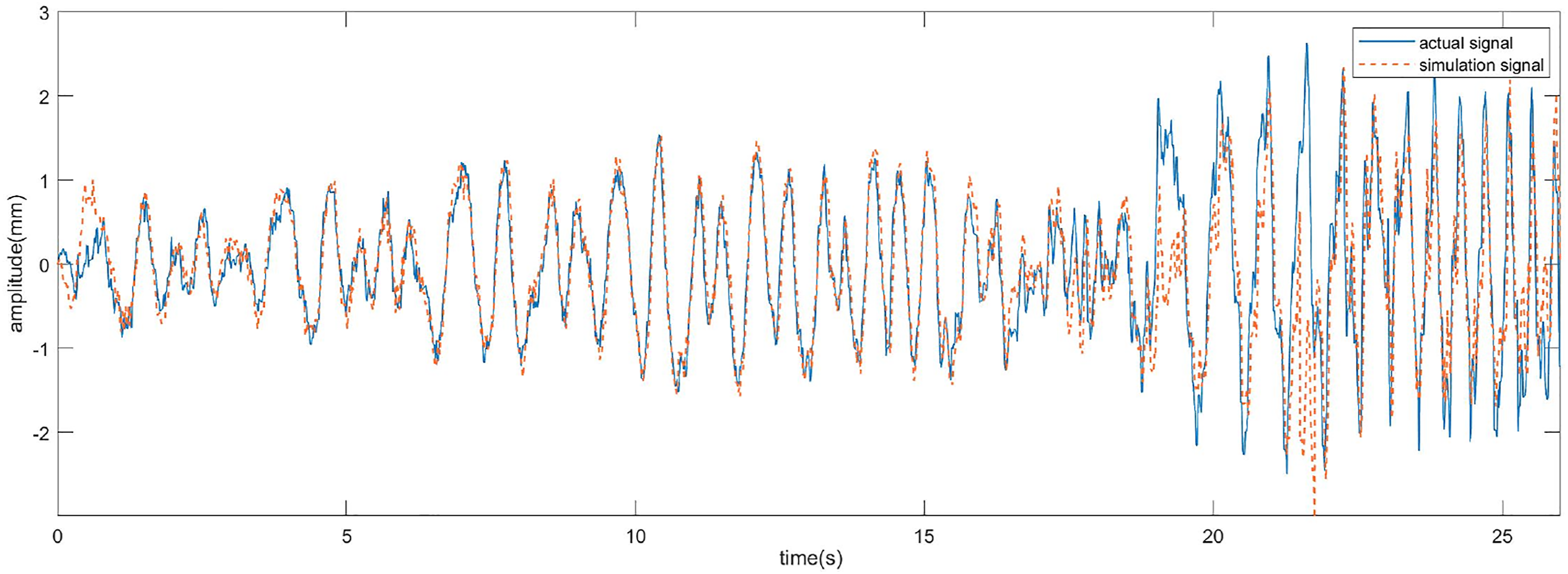
Conclusion
In this paper, the vibration signal of the high-speed elevator hoist rope at fixed height is obtained by the visual sensor, and the vibration characteristics of the hoisting system during the rising stage are studied. The research results include the following: (1) In the acceleration and uniform ascent stage (0–14 s) of the high-speed elevator, the vibration of the hoist rope is mainly composed of the low-frequency components, which are below 3 Hz. In the deceleration ascent stage (14–26 s), the vibration of the hoist rope is mainly composed of the high-frequency components, which are distributed at a wide range of frequencies higher than 4 Hz; meanwhile, there is still a minor component of frequency below 4 Hz. (2) The phenomenon like a beat appears in the vibration of the traction rope at the acceleration and uniform ascent stage of the high-speed elevator. (3) The results obtaining from the physical model with the excitation of the driving sheave have a significant deviation from the actual response from the actual system in the working condition. The excitation from the external environment has a significant impact on the vibration of the rope.
Aiming at considering the influence of the external environment on the rope vibration in the physical model of the hoisting system, a modified model of the elevator hoisting system based on LSTM is proposed, and the absolute error of the modified model decreases by 75.9% compared with the original physical model.
In the future, we plan to conduct this modified model to an elevator as a basis to control the vibration of the hoisting system. The framework is shown in Figure 14. The data will be collected at runtime and stored in the database to train and improve the modified model consistently and some control strategies will be proposed with this modified model to suppress the vibration. The framework of the proposed method.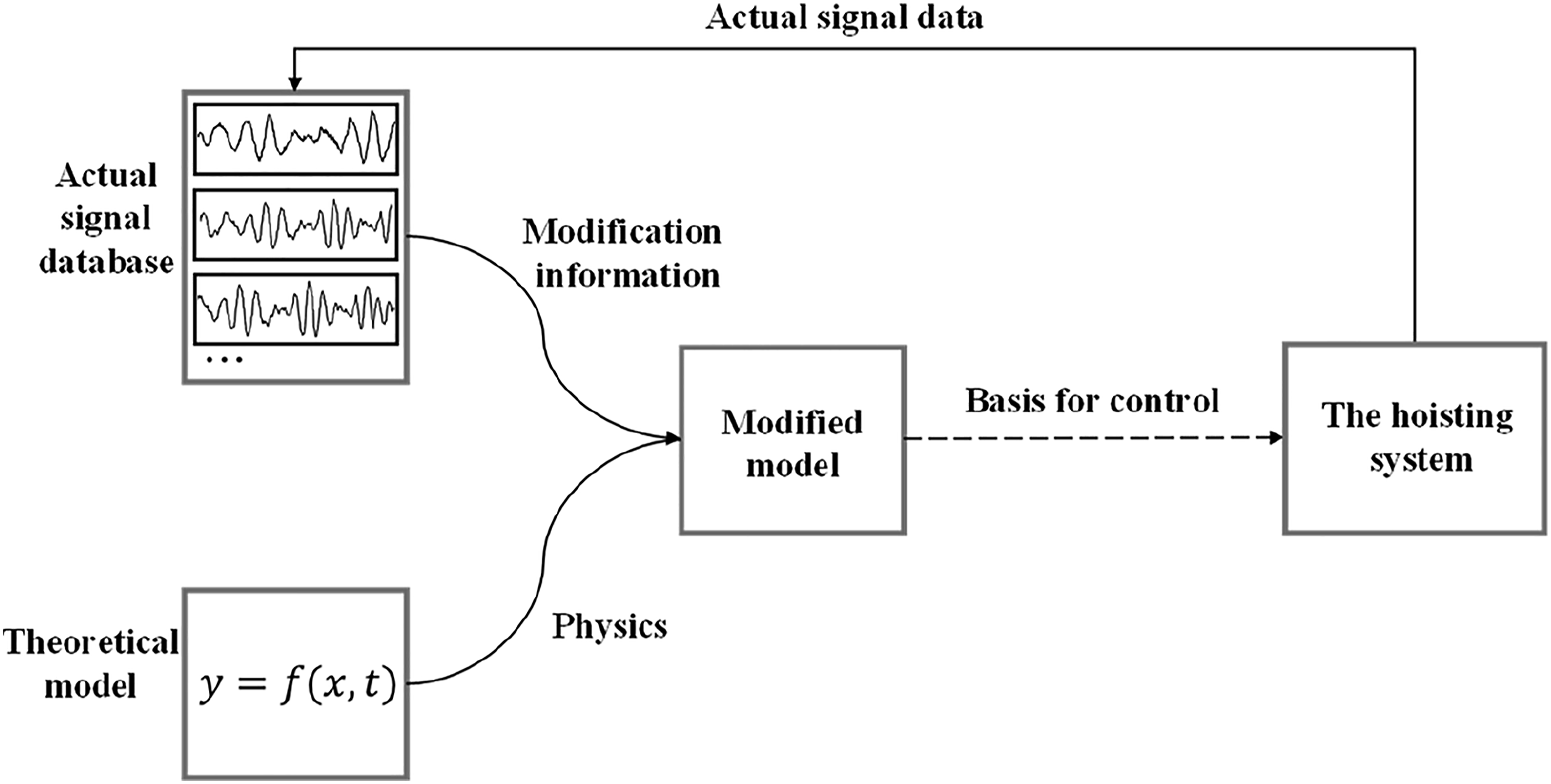
Footnotes
Author contributions
All authors discussed the results and contributed to the final manuscript. Shuai Mao, Jingren Xie and Jianfeng Tao contributed to physical analysis. Shuai Mao, Jingren Xie, Shuang Xu, Honggan Yu and Longye Chen analyzed the data. Shuai Mao wrote the paper. Jingren Xie, Honggan Yu, Jianfeng Tao and Chengliang Liu modified the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (Grant No. 51935007) and Shanghai Municipal Science and Technology Major Project (Grant No. 2021SHZDZX0102)
Data availability statement
The data supporting the conclusion of the article are shown in the relevant figures and tables in the article. The data used to support the findings of this study are available from the corresponding author upon request.
Appendix
Solution to the PDEs in Section 2
Equations (13) and (14) are higher-order PDEs derived from the elevator hoisting system dynamics model. It is difficult to solve with a conventional numerical method. Here we adopt the Galerkin algorithm to solve it. By adopting this algorithm, the higher-order PDEs in Section 2.1 are discretized into ordinary differential equations (ODEs) so that it is convenient to solve them with the Runge–Kutta process. The Galerkin method approximates the solution to PDEs with the weighted basis functions such as harmonic functions and polynomial functions. In this way, the PDE problem is transformed into a problem of finding the weight coefficients of each given basis function. Given the characteristics of
Because the hoisting system is a mechanical vibration system, a series of sinusoidal functions which have different frequencies have been chosen as basis functions.