
Abstract
In order to realize the time-domain analysis based on hysteretic damping model, the frequency-independent time-domain damping model of single degree of freedom (SDOF) system is constructed. Based on the assumed relationship of vibration responses, the equivalent frequency-independent time-domain damping model in complex domain and real domain are proposed. The characteristic that the dissipated energy in each cycle is not related to the vibration frequency of external excitation is retained for the two equivalent damping models. Combined with Newmark-β method, the corresponding numerical methods are obtained. The numerical examples show that the free vibration responses are stably convergent based on equivalent damping models. The numerical results of vibration responses of SDOF system due to earthquake wave have high calculation accuracy. Compared with equivalent frequency-independent time-domain damping model in real domain, the computational accuracy of equivalent frequency-independent time-domain damping model in complex domain is higher, and the computational efficiency is lower.
Introduction
The hysteretic damping model1–3 (or called complex damping model 4 ) is a common internal damping model. The hysteretic damping model can used to calculate structural vibration responses and provide reference for the oscillation theory.5,6 The hysteretic damping model is different from the viscous damping model. 7 The characteristic of the hysteretic damping model is that the energy dissipation in each cycle is independent of the external excitation frequency for the steady state response. 8 The characteristic is consistent with the harmonic vibration test results of most engineering materials. 9 However, the viscous damping model does not have the characteristic.
The time-domain motion equation of hysteretic damping model for the single degree of freedom (SDOF) system is expressed as8,10


The corresponding motion equation of free vibration response is expressed as

Using the complex plane method to solve equation (3), which is obtained as


Equation (4) includes exponential increment term. The divergent term of the displacement is

In order to overcome the shortcoming of hysteretic damping model, the equivalent time-domain damping model was proposed. The Maxwell–Wiechert model can be equivalent to complex damping model. 14 Then, Genta and Amati 15 proposed an equivalent model that the Maxwell–Weichert model with a number meter of spring damper branches. Luo et al. 16 paralleled a Maxwell element and a negative stiffness element, which is approximately equivalent to hysteretic damping model. Yang et al. 17 obtained an equivalent viscoelastic damping model with five parameters based on the least square method. Wang 18 determined the equivalent Rayleigh damping coefficients by aid of hysteretic frequency-domain damping model. To further simplify the equivalent process, an equivalent viscous damping model is obtained for SDOF systems, however, the natural frequency is only considered and there are no vibration modes involved in this process. 19
In this paper, the frequency-independent time-domain damping model can be derived, which is equivalent to hysteretic frequency-domain damping model. The proposed damping model has time-domain characteristic.
20
The equivalent frequency-dependent damping model in complex domain can be obtained based on the relationship between velocity and displacement. The equivalent frequency-dependent damping model in real domain can be obtained based on the relationship between acceleration and displacement. Combined with Newmark-β method, the corresponding time-domain numerical calculation method is proposed based on the equivalent frequency-dependent damping models in complex domain and real domain. The procedure of the proposed method is presented in Figure 1. The free vibration response, harmonic vibration response and seismic vibration response of numerical examples are calculated, and the time-history results of different methods are compared. Flow chart of the proposed method.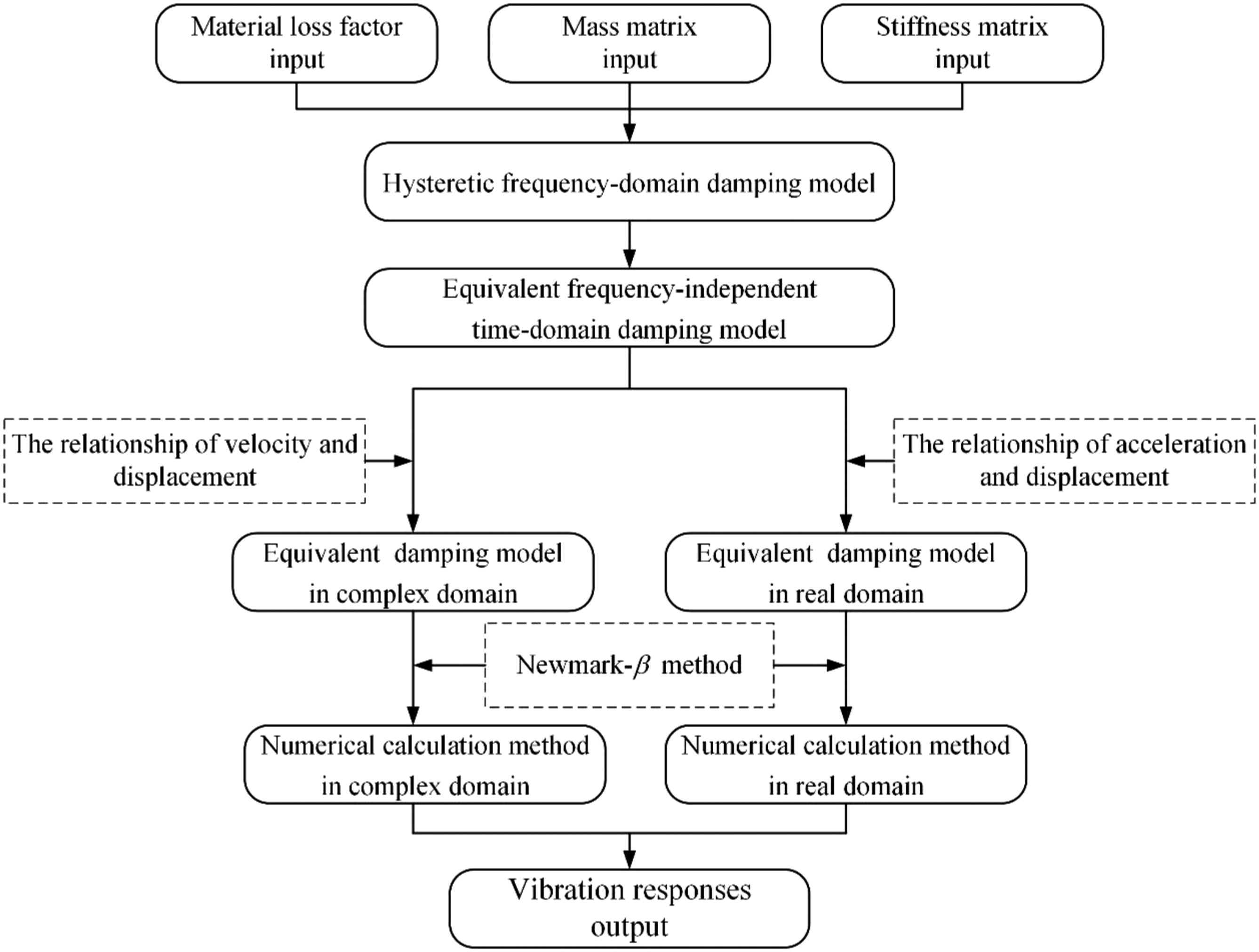
Equivalent frequency-independent time-domain damping model in complex domain
Based on velocity and displacement in complex domain
Due to the harmonic wave, the frequency-domain motion equation of hysteretic damping model for SDOF system is expressed as


Based on equation (7), the linear frequency-independent damping time-domain motion equation of SDOF system is equivalent to the frequency-domain motion equation of hysteretic damping model for steady state harmonic vibration response, which is expressed as in complex domain



The steady state response is expressed as

The dual item is expressed as

In the steady state response, the vibration frequency is

The dissipated energy in each cycle is

Equation (15) shows that the energy is not related to the vibration frequency of external excitation, which is consistent with the conclusion of reference.
9
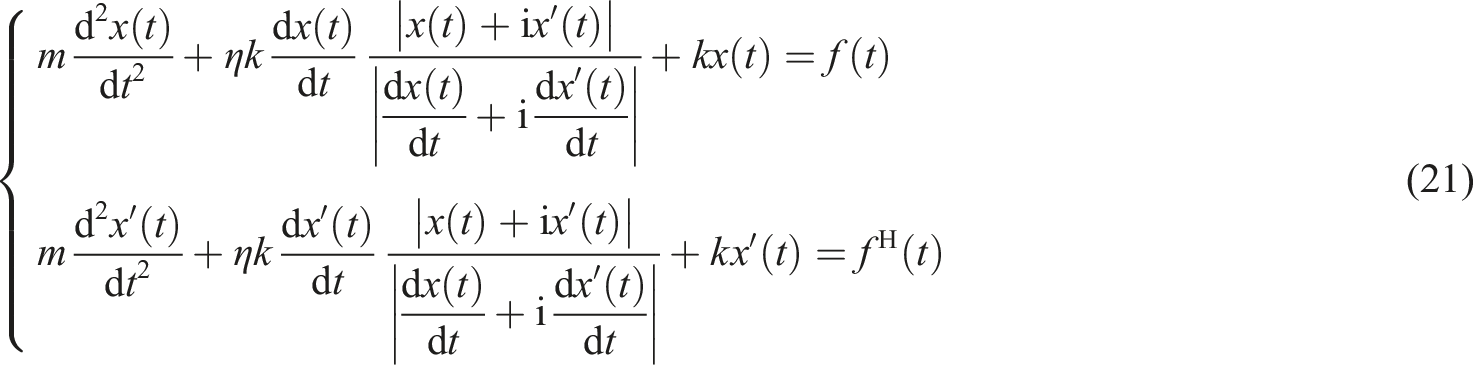
The corresponding frequency-independent time-domain damping model is difficult to analyze. The reason is that there is unknown item
Based on the relationship of velocity and displacement in complex domain, the vibration frequency is expressed as

Equation (16) is substituted into equation (9), which is rewritten as

The dissipated energy in each cycle is

Equation (18) shows that the energy is not related to the vibration frequency of external excitation, which is consistent with the frequency-independent time-domain damping model.
The scope of application is extended from harmonic wave to random external excitation. Based on equation (17), the equivalent frequency-independent time-domain damping model in complex domain is expressed as


Numerical calculation method
The common numerical calculation methods can be used to solve equation (19), such as central difference method,
7
Newmark-β method,
25
Wilson-θ method,
26
and variational iteration method.
27
Compared with other methods, Newmark-β method (
By the Fourier transform method,

By the Hilbert transform method,

Time-history can be discretized, namely

The vibration frequency at time
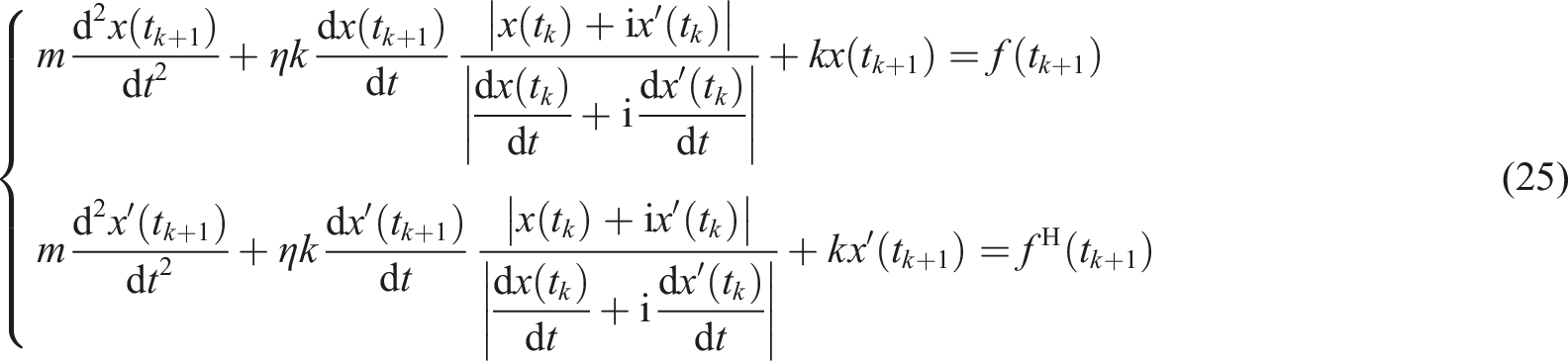
The average acceleration method based on Newmark-β method is unconditionally stable. The average acceleration method is used to calculate the vibration responses, which are obtained as




Substituting equations (26)–(29) into equation (25),
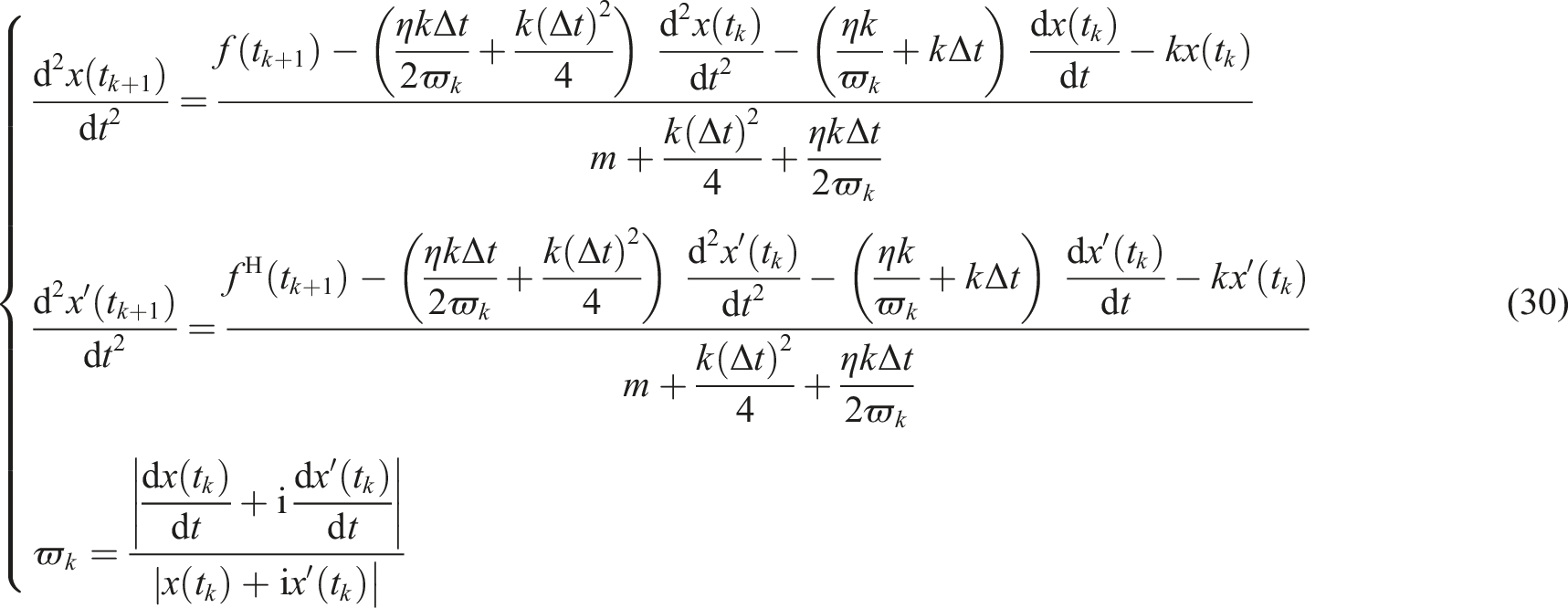
Substituting equation (30) into equations (26)–(29),
In the time-history iterative calculation process, when
Here is also a problem that initial conditions of SDOF system should be determined first. The vibration frequency at the initial time assumed to be the damped natural frequency, which is


Equivalent frequency-independent time-domain damping model in real domain
Based on acceleration and displacement in real domain
Based on equation (9), the linear frequency-independent damping time-domain motion equation of SDOF system is equivalent to the frequency-domain motion equation of hysteretic damping model for steady state harmonic vibration response, which is expressed as in real domain

Based on the relationship of velocity and displacement in complex domain, the vibration frequency is expressed as

Equation (34) is substituted into equation (33), which is rewritten as

The dissipated energy in each cycle is

Equation (36) shows that the energy is not related to the vibration frequency of external excitation, which is consistent with the conclusion of reference. 9
The scope of application is extended from harmonic wave to random external excitation. Based on equation (36), the equivalent frequency-independent time-domain damping model in real domain is expressed as

Numerical calculation method
The numerical method is proposed for solving equation (37), which is similar to the one of the equivalent frequency-independent time-domain damping model in complex domain, and is also combined with Newmark-β method.
The vibration frequency at time

Based on Newmark-β method, substituting equations (26)–(29) into equation (38),
Repeated equations (26)–(29) and (39) can complete the time-history iterative calculation of the dynamic response for SDOF system.
Numerical study
Free vibration response
Model properties of numerical examples.

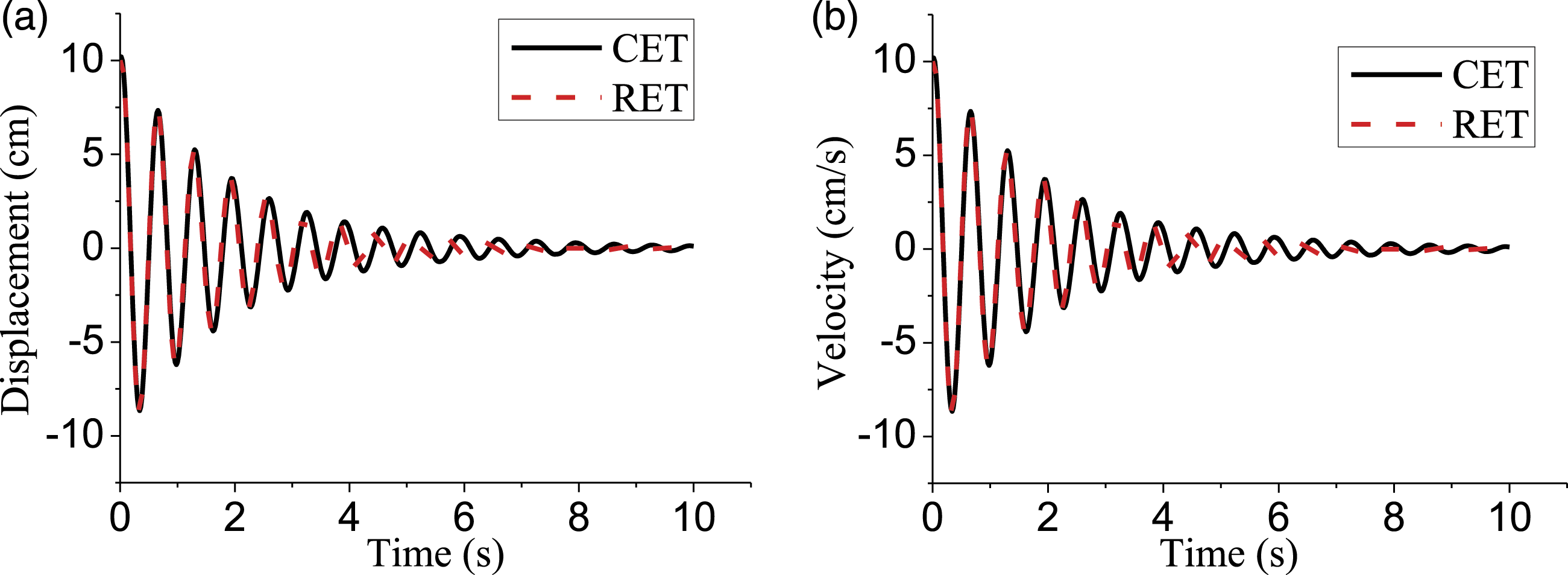
The free vibration responses of Model A: (a) displacement time-history, (b) velocity time-history.
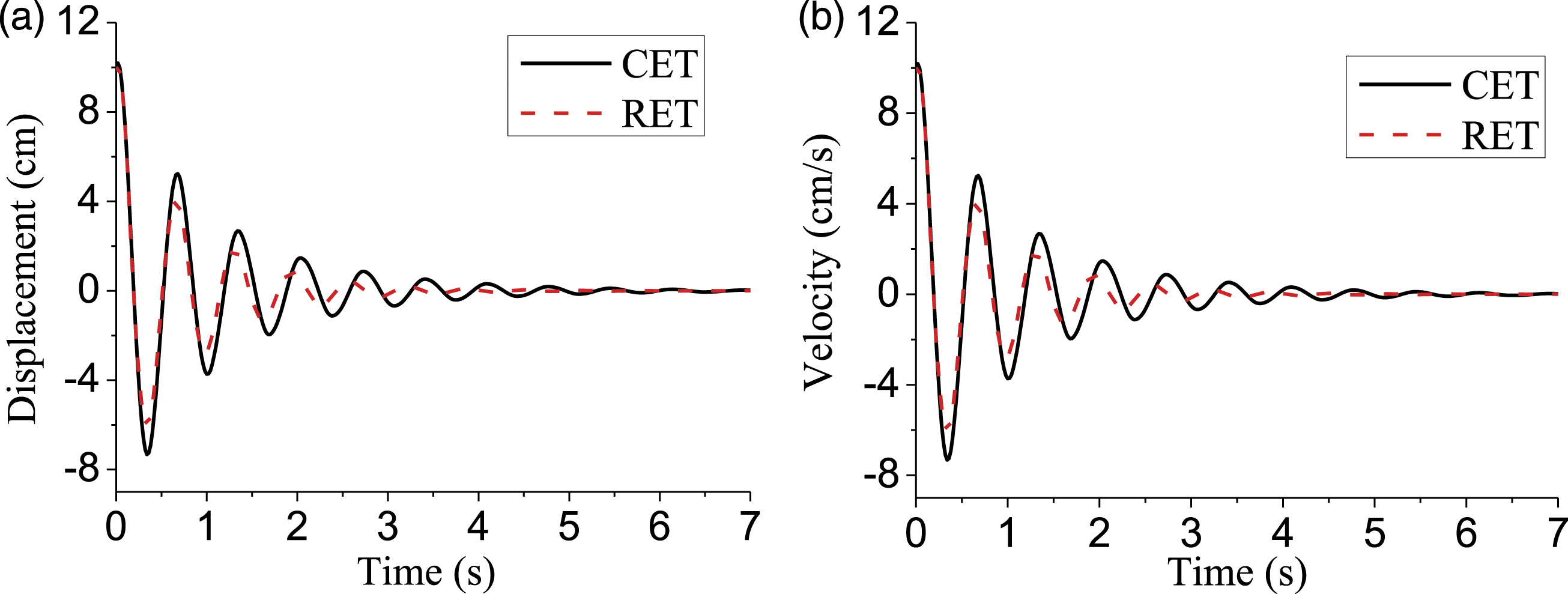
The free vibration responses of Model B: (a) displacement time-history, (b) velocity time-history.
Harmonic vibration response
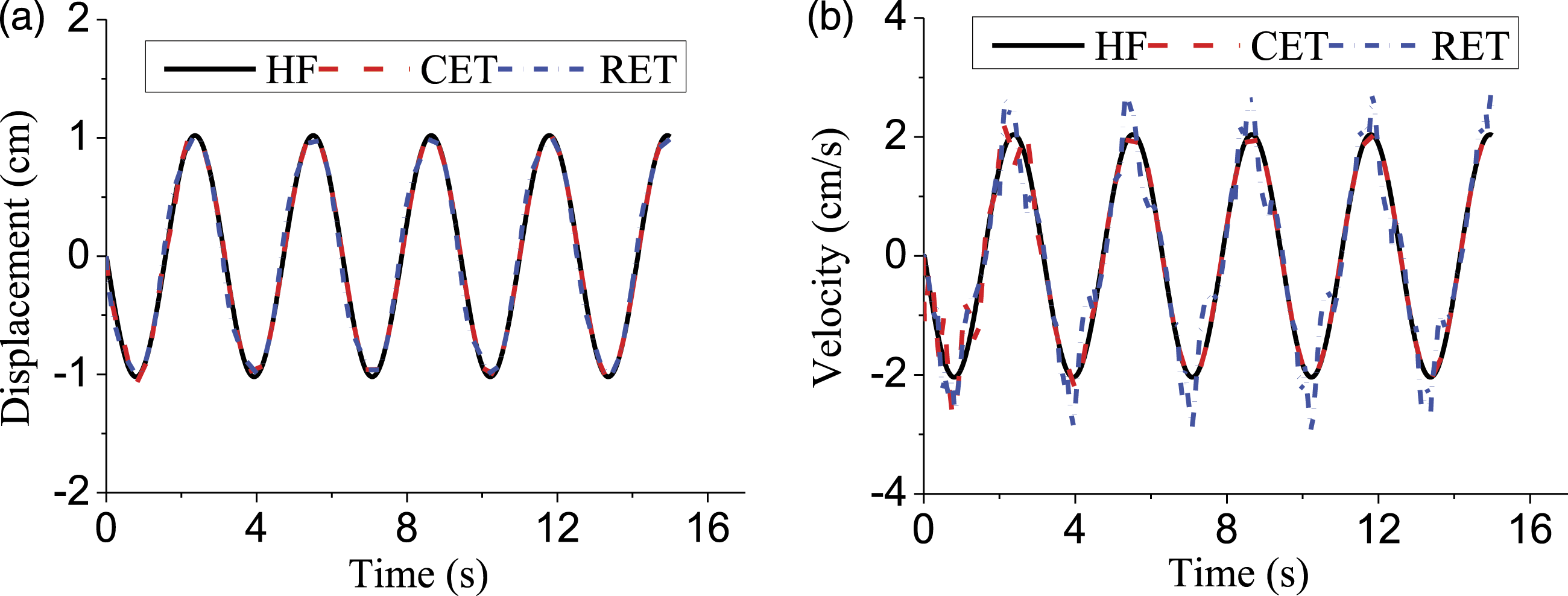
The external excitation is harmonic wave that only includes a single vibration frequency, and the vibration frequency is 2 rad/s. The initial conditions are static. Based on CET and RET, the displacement time-history and velocity time-history of Model A and Model B are calculated, which are shown in Figure 4 and Figure 5. Besides, hysteretic frequency-domain damping model (HF)
28
can only calculate the steady state responses. The displacement time-history and velocity time-history of Model A and Model B are obtained based on HF. The calculated results of HF only include the steady state response of SDOF system, and do not include the transient response. During the initially short time, Model A and Model B do not reach steady state and the free vibration response has not completely attenuated. The calculated results of CET and RET are slightly different from the one of HF. When Model A and Model B are in steady state, the displacement time-histories of CET, RET, and HF are approximately equal. However, the velocity time-history of RET is obviously different. Compared with RET, the velocity time-history of CET is closer to the one of HF. The results show that the computational accuracy of CET is higher. The vibration responses of Model A due to harmonic wave: (a) displacement time-history, (b) velocity time-history. The free vibration responses of Model B due to harmonic wave: (a) displacement time-history, (b) velocity time-history.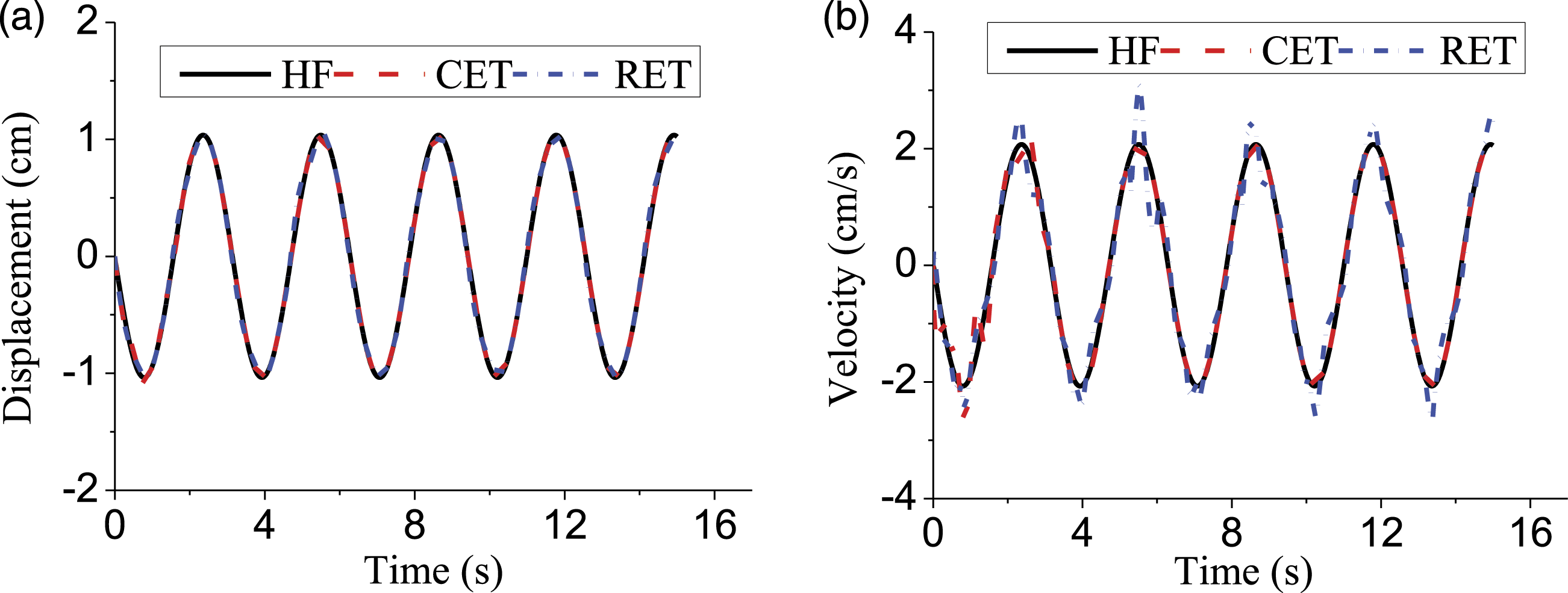
Seismic vibration response
The information of earthquake waves.

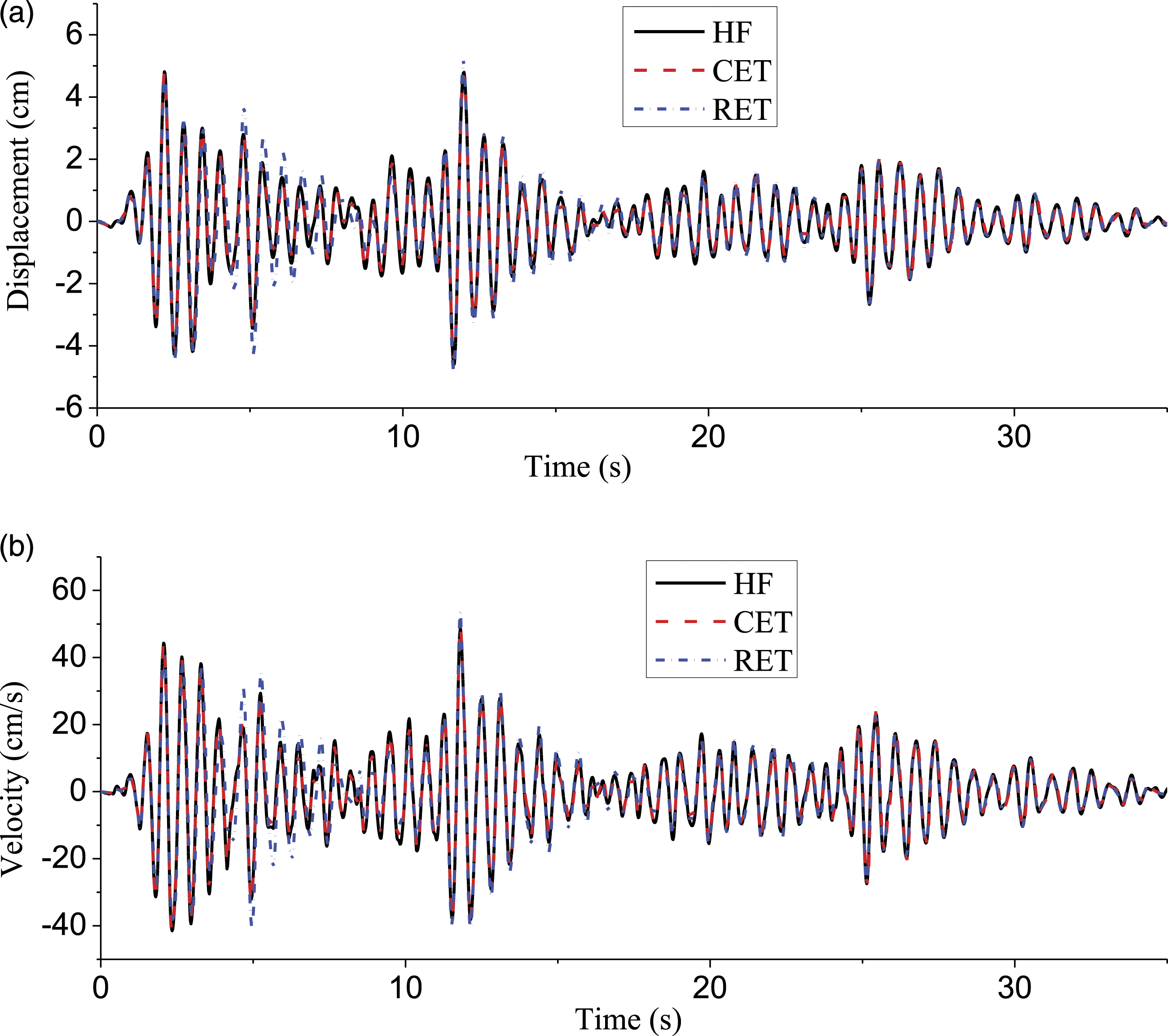
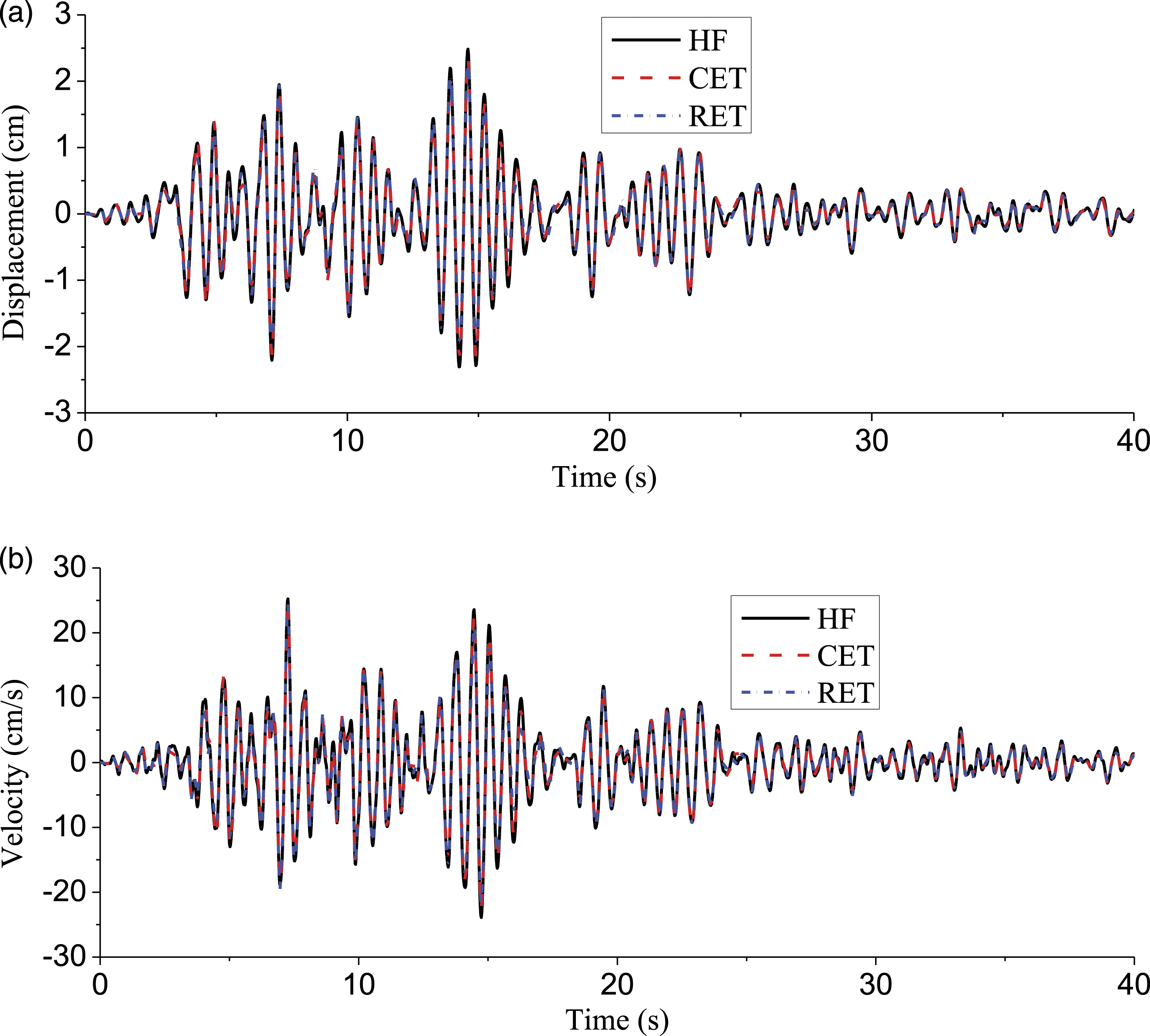
The vibration responses of Model A due to El Centro wave: (a) displacement time-history, (b) velocity time-history.
The vibration responses of Model B due to El Centro wave: (a) displacement time-history, (b) velocity time-history.
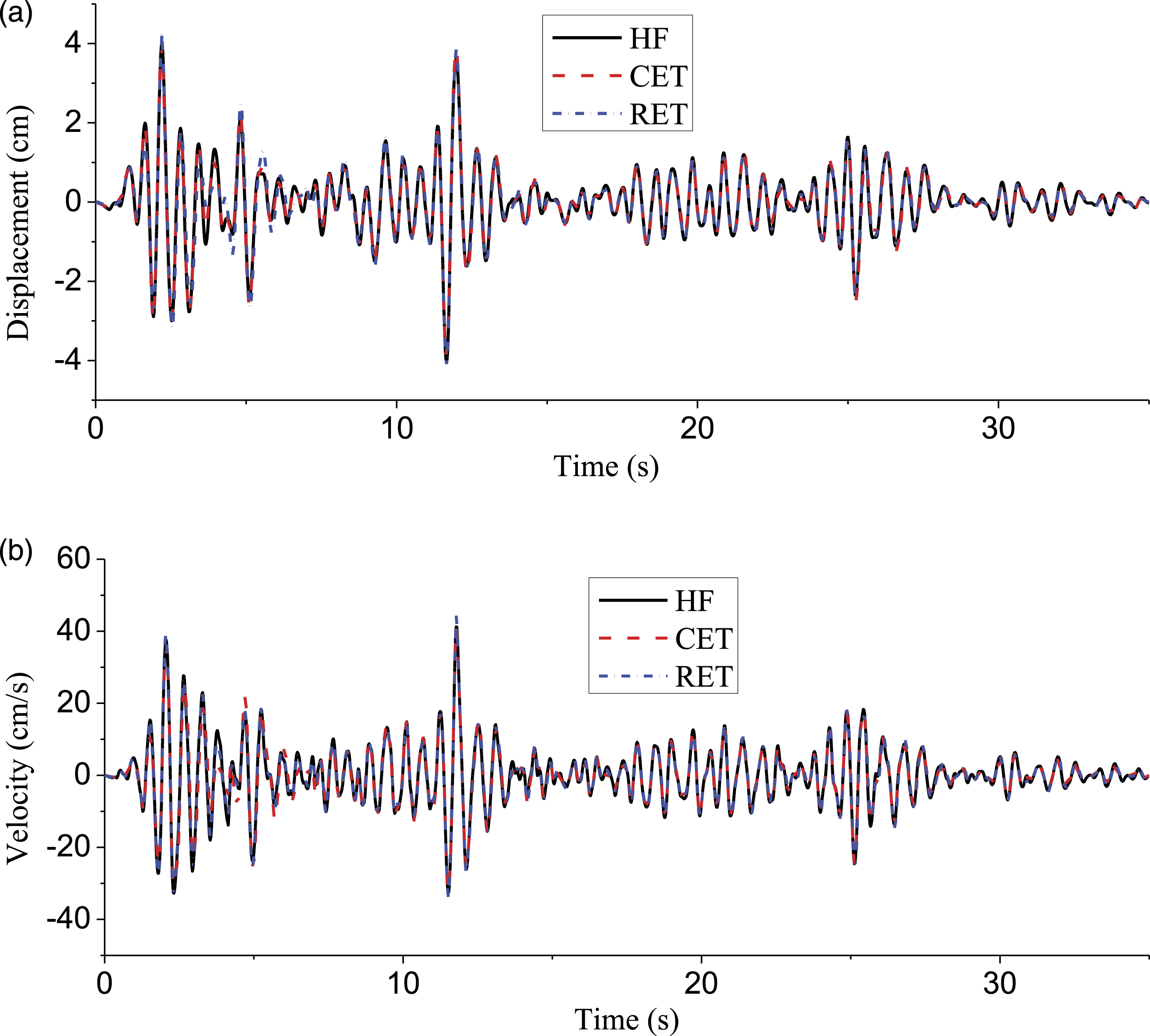
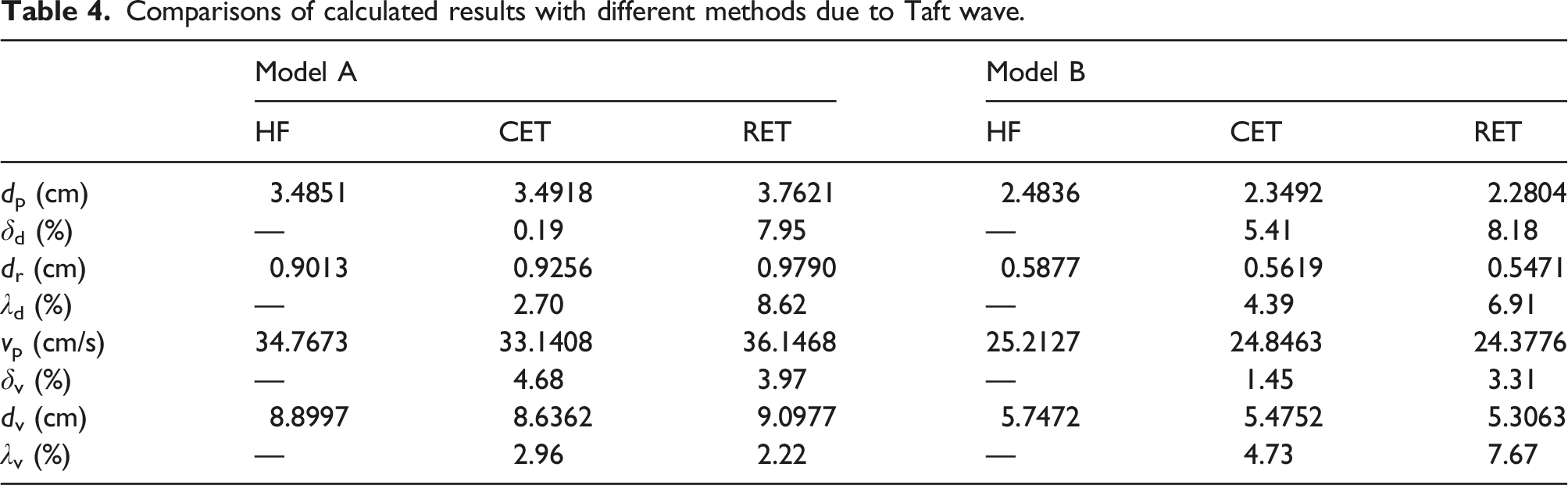
The vibration responses of Model A due to Taft wave: (a) displacement time-history, (b) velocity time-history.
The vibration responses of Model B due to Taft wave: (a) displacement time-history, (b) velocity time-history.
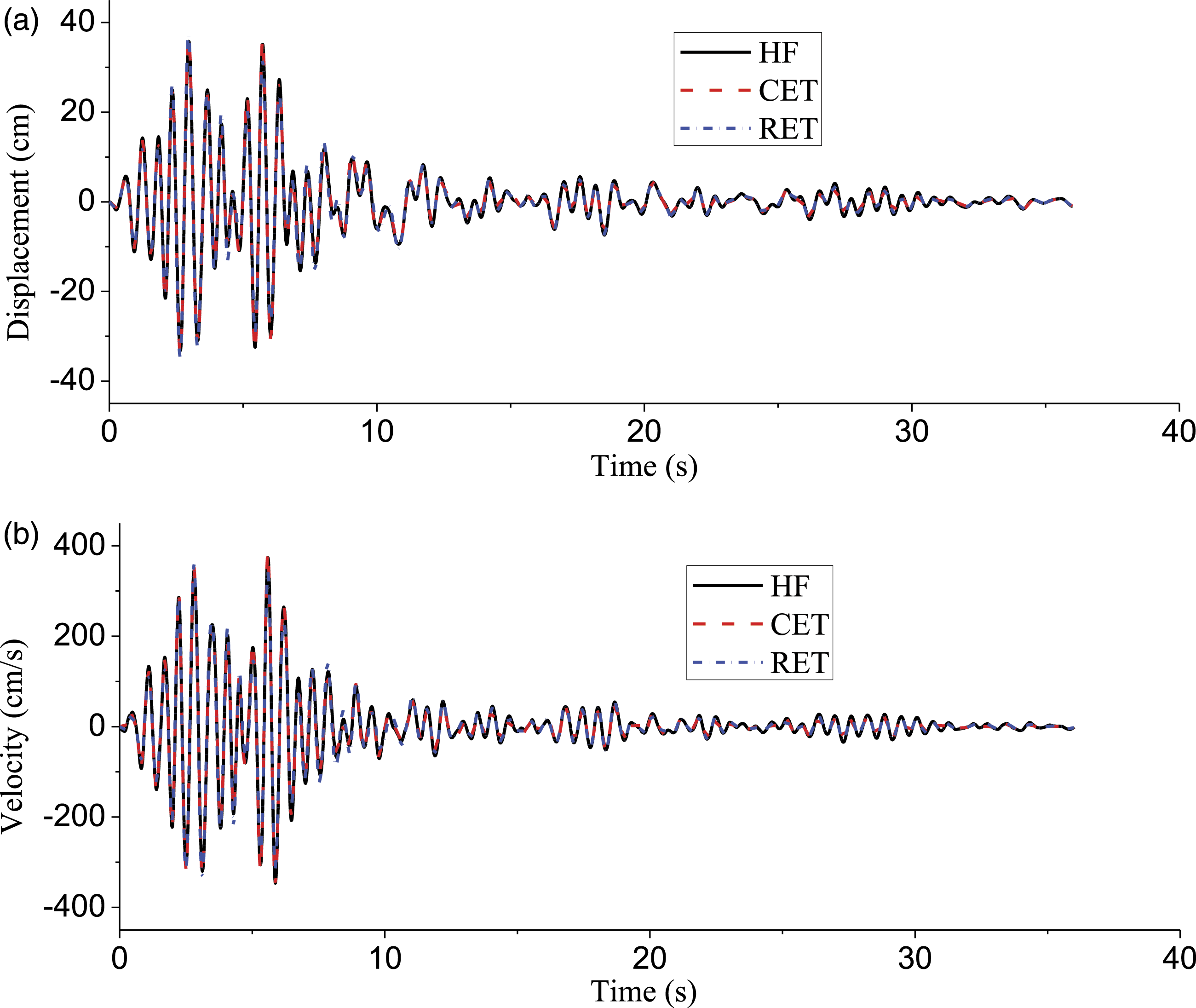
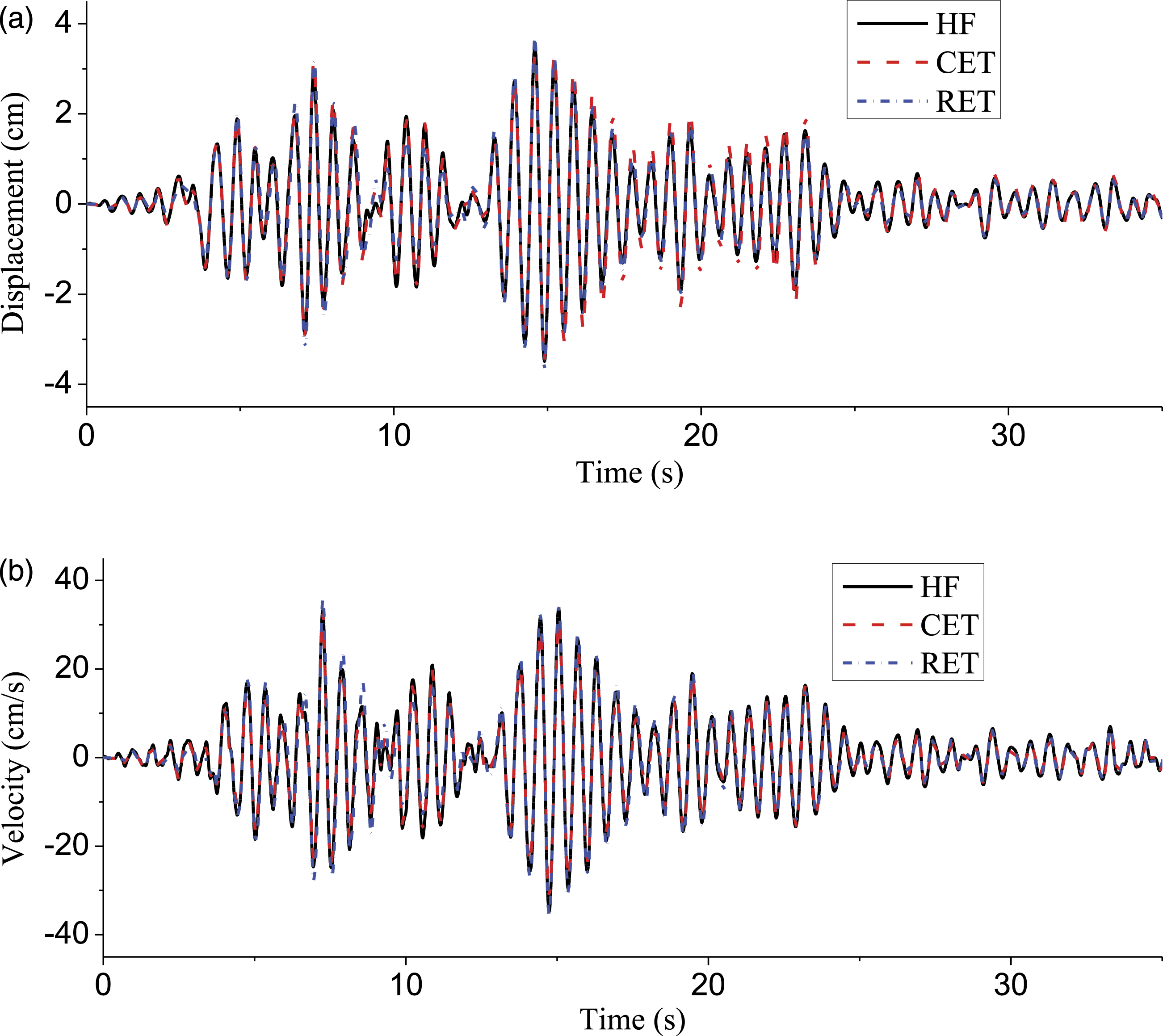
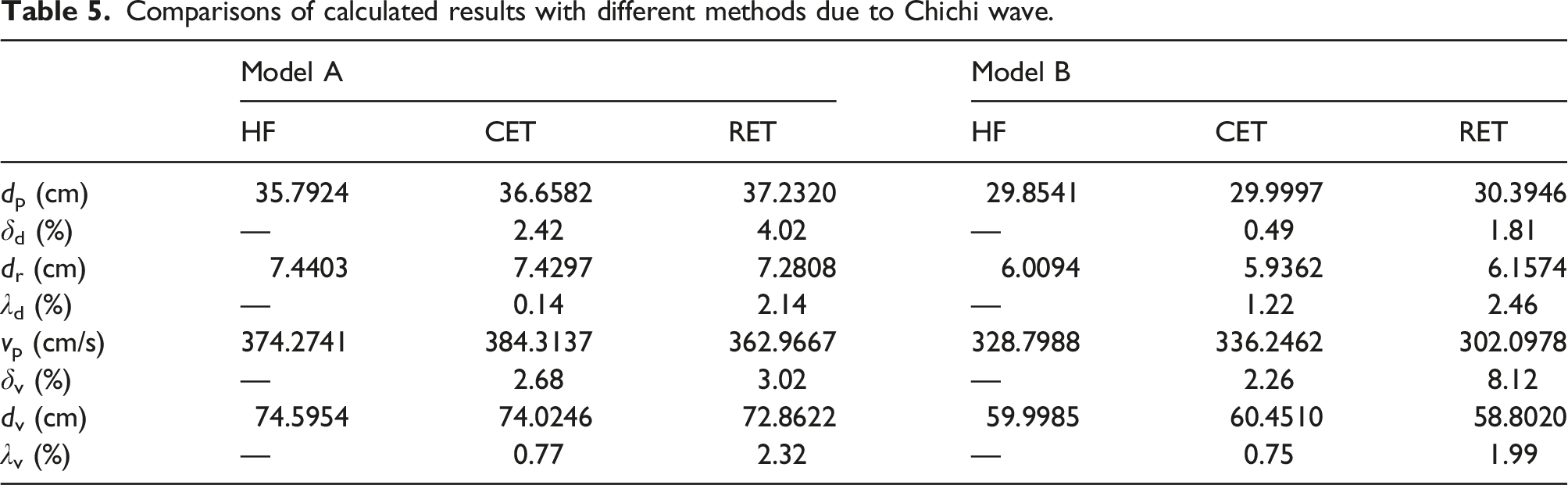
The vibration responses of Model A due to Chichi wave: (a) displacement time-history, (b) velocity time-history.
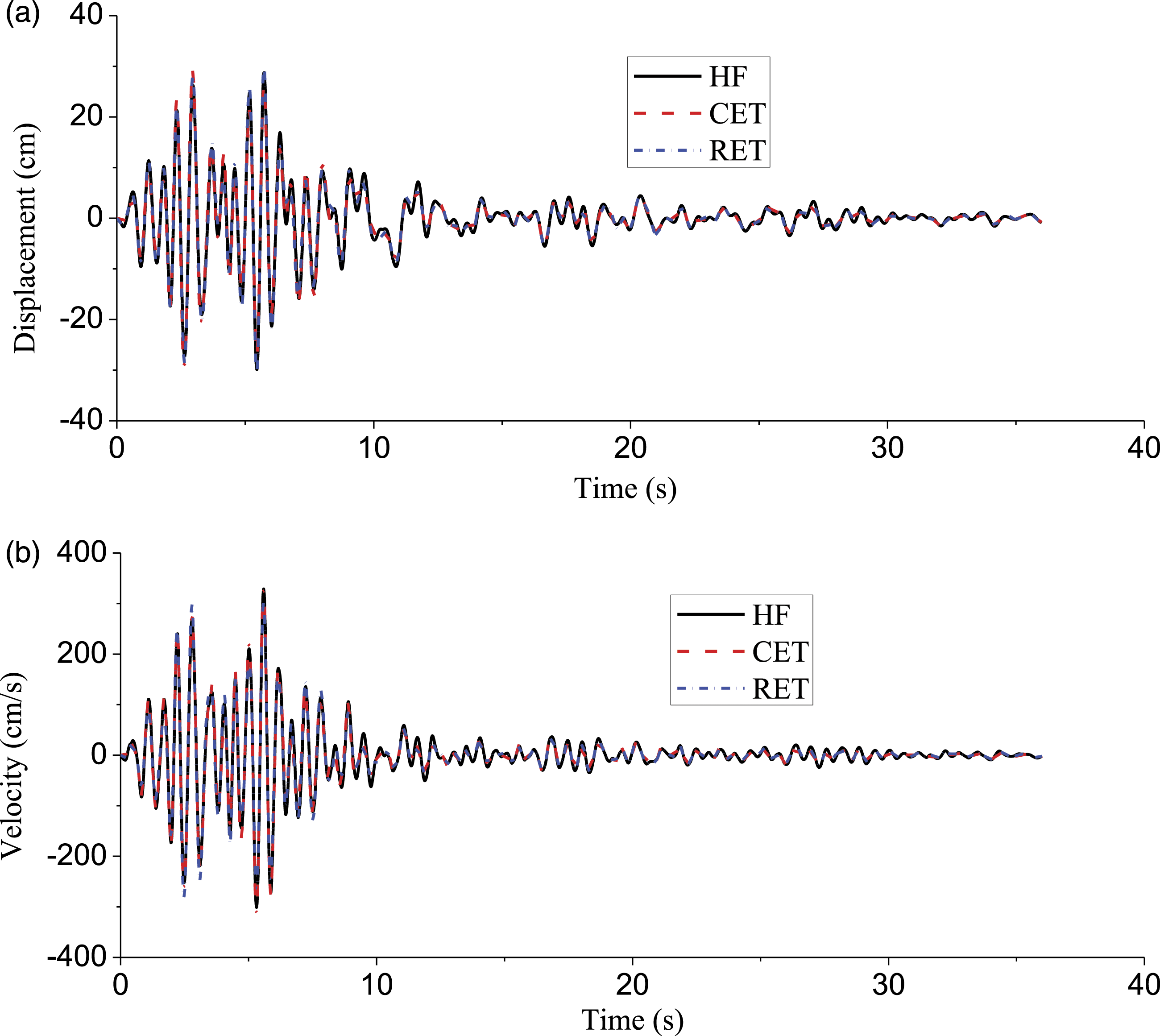
The vibration responses of Model B due to Chichi wave: (a) displacement time-history, (b) velocity time-history.
Comparisons of calculated results with different methods due to El Centro wave.
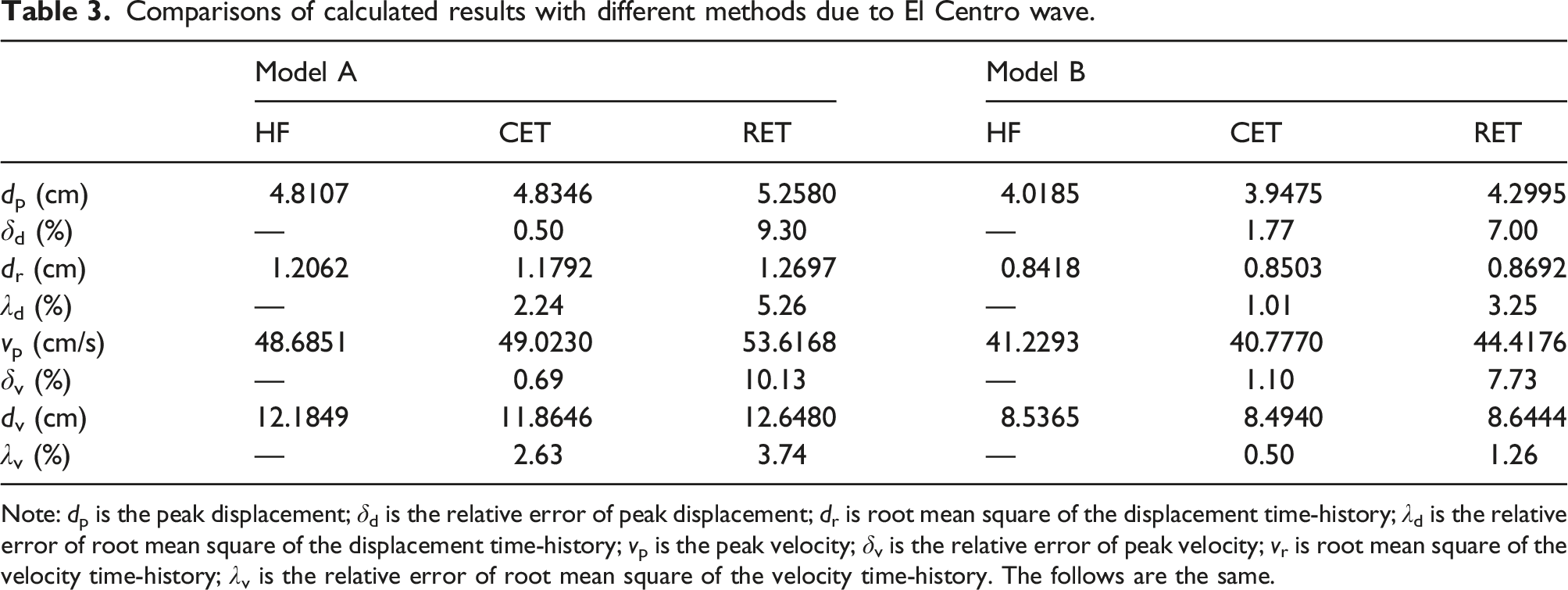
Note: dp is the peak displacement; δd is the relative error of peak displacement; dr is root mean square of the displacement time-history; λd is the relative error of root mean square of the displacement time-history; vp is the peak velocity; δv is the relative error of peak velocity; vr is root mean square of the velocity time-history; λv is the relative error of root mean square of the velocity time-history. The follows are the same.
Comparisons of calculated results with different methods due to Taft wave.
Comparisons of calculated results with different methods due to Chichi wave.
Computing time of different methods (in: second).

Conclusions
In the present work, the frequency-independent time-domain damping model is equivalent to the hysteretic frequency-domain damping model for steady state harmonic vibration response. However, the time-domain motion equation includes unknown vibration frequency. Based on the relationship of velocity and displacement, the equivalent frequency-independent time-domain damping model is proposed in complex domain. Based on the relationship of acceleration and displacement, the equivalent frequency-independent time-domain damping model is proposed in real domain. Combined with Newmark-β method, the corresponding numerical methods are obtained in time-domain, respectively. The main conclusions are as follows. (1) In order to overcome the shortcoming that hysteretic damping model cannot be directly applied in time-domain, the equivalent frequency-independent time-domain damping models are proposed. The proposed damping models can reserve the characteristic that the energy dissipation in each cycle is independent of the external excitation frequency for the steady state vibration response. Besides, the problem that the vibration responses are divergent in the time-domain is solved. (2) The numerical methods of the equivalent frequency-independent time-domain damping models are realized. Based on the two equivalent frequency-independent time-domain damping models, the corresponding free vibration responses are convergent. And the time-domain numerical results have high calculation accuracy for harmonic wave and earthquake wave. (3) The proposed two methods can be applied to different conditions. Compared with equivalent frequency-independent time-domain damping model in real domain, the computational accuracy of equivalent frequency-independent time-domain damping model in complex domain is higher. However, Fourier transform of external excitation is involved in the calculation process. The computational efficiency of equivalent frequency-independent time-domain damping model in complex domain is lower.
By aid of the mode superposition method, the numerical method for multi degree of freedom (MDOF) systems can be decomposed into the numerical method for SDOF systems. The proposed method can be easily extended to MDOF systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Natural Science Foundation of China (Grant No. 51878621) and partially supported by the Key Research Projects of Henan Higher Education Institutions (Grant No. 22A560005).