
Abstract
With the rapid development of railways in China, effective coordination of the operation of high-speed trains on existing tracks can bring significant economic benefits to railway transportation. However, high-speed trains running on existing tracks will have to cope with larger track irregularities and navigate smaller curve radii, potentially increasing their vibrations. In order to improve the quality of operation of high-speed trains on existing railways, a self-adjusting hybrid damping control (SAHDC) strategy utilizing a fuzzy controller is adopted in this study. A secondary lateral magnetorheological damper (MRD) is controlled to balance the vibration between the car body, bogie, and wheelset. The MRD behavior is described using a viscoelastic-plastic (VEP) model and nonlinear autoregressive exogenous (NARX) inverse model. A dynamical vehicle model with 50 DOFs is constructed and simulated under different existing track conditions. The results show that the SAHDC can guarantee the required ride quality of the car body, while reducing the vibration of the bogie frame and wheelsets as much as possible during travel on straight and curved tracks and suppressing derailment on turnouts.
Keywords
Introduction
Concern the interconnectivity, economics, and operational efficiency, the high-speed trains need to and have to be accommodated on the existing and newly built high-speed railway lines. This mixed-line operation leads to more complexity in vehicle operational environment, including diversified track irregularities, track geometries, turnouts, and rail profiles, etc. The track irregularities of existing railways are significantly more severer than those of the high-speed tracks, 1 as a result, the wheel/rail interacting vibration and vehicle oscillations would be stronger under poor track conditions. The curve radii of the existing railways are also smaller than those of high-speed lines, which could lead to larger wheel-rail lateral forces and higher derailment risk. The divergences of operational environment on the existing railway and the high-speed railway obviously differ the vehicle dynamics characteristics. Thus, the two-stage suspension system of bogie are critical to isolate the excitations of the wheel/rail interaction from the car body, and the performance of the suspension system determines the running safety and ride comfort of the vehicle. Due to the ability limitation of passive suspension in vibration isolation, the high-speed train with a passive suspension shows insufficient adaptability to the track excitations as well as the operation modes. To solve this problem. Applying an active control on the suspension system is a feasible way to improve the operation adaptability of high-speed trains on various types of tracks. Both semi-active and full-active control suspension can be benefit to the vehicle dynamics performance, and they have been the topic in the railway industry for decades.
Significant progress has been made on researching the semi-active control strategy for railway vehicle due to their feasibility, reliability and practicability. 2 Several strategies have been proposed to improve the vehicle dynamics performance. Sinha et al. 3 applied the optimal control theory to the suspension system, and Williams 4 compared several control systems for active suspension. It is found that the optimal control theory propose a very efficient method of designing a regulator of an active suspension, 4 however, this theory is difficult to be applied in a large system. Some researches 5,6 showed that the lateral ride comfort of the vehicle could be improved by an adaptive prediction controller and an H∞ control algorithm. Due to their desirable response characteristics, magnetorheological dampers (MRDs) were proposed as actuators in control system.6,7 The skyhook (SH) damping control strategy is one of the most mature control algorithms and has been studied extensively. 8 Improving the ride quality and reducing car body vibration are the main objectives of this control strategy,9,10 which reduces effectively the amplitude and root mean square (RMS) of the car body vibrations. Furthermore, its variant can also be applied to reduce the derailment risk. 11 Gao et al. 12 and Wang et al. 13 studied the application of SH control method in special running condition, it is found that the SH control method had good performances under strong side wind and poor track irregularities conditions. Some other researches on the SH strategy have deeply improved the control algorithms. For example, in literature 14, car body velocity was replaced by the acceleration as the target parameter in the acceleration-driven-damper (ADD) strategy. A mixed strategy called SH-ADD was also developed by Savaresi, 15 the results showed that the SH-ADD algorithm had similar feature of the behavior of SH and ADD methods and reduced the vibration amplitude in a wider frequency bandwidth. Other researchers16–18 conducted quarter-car experimental models to study the groundhook (GH) control and hybrid damping control (HDC) method, which combining the SH and GH control. The results show that the traditional SH damping control strategy can only suppress the low-frequency vibrations of the car body, thus a modified SH-ADD control strategy is adopted to reduce the car body vibrations in a wide frequency range. However, this strategy inevitably amplifies additional force on the bogie, which enhance the vibration of the bogie, especially for high-speed vehicles running on poor-condition tracks. The vehicle vibrations under a fixed value of hybrid damping coefficient were analyzed, 17 while literature rarely focuses on the relationship between the required hybrid damping coefficient and vehicle vibrations, even though a fixed coefficient is not optimal for variability of existing lines.
In this investigation, a HDC control strategy for both enhancing the ride quality and the hunting stability of a high-speed train is proposed when it is operated on various railways. The proposed self-adjusting HDC (SAHDC) strategy combines the SH-ADD and GH control to restrain the vibration on the car body but also that on the bogie, and the adjusting damping coefficients are adjusted through using a fuzzy controller. The MRD model and its inverse model is described by a viscoelastic-plastic (VEP) model and nonlinear autoregressive exogenous (NARX) inverse model, respectively. The paper is organized as follows. First, the models for an existing track, high-speed train dynamics, and MRD are introduced. Then, the control system model is established using the SAHDC control strategy and numerical experiments on its performance are conducted, which apply the novel strategy to a vehicle system operating in typical existing railway conditions.
Vehicle and suspension modelling
Multibody model of high-speed vehicle system
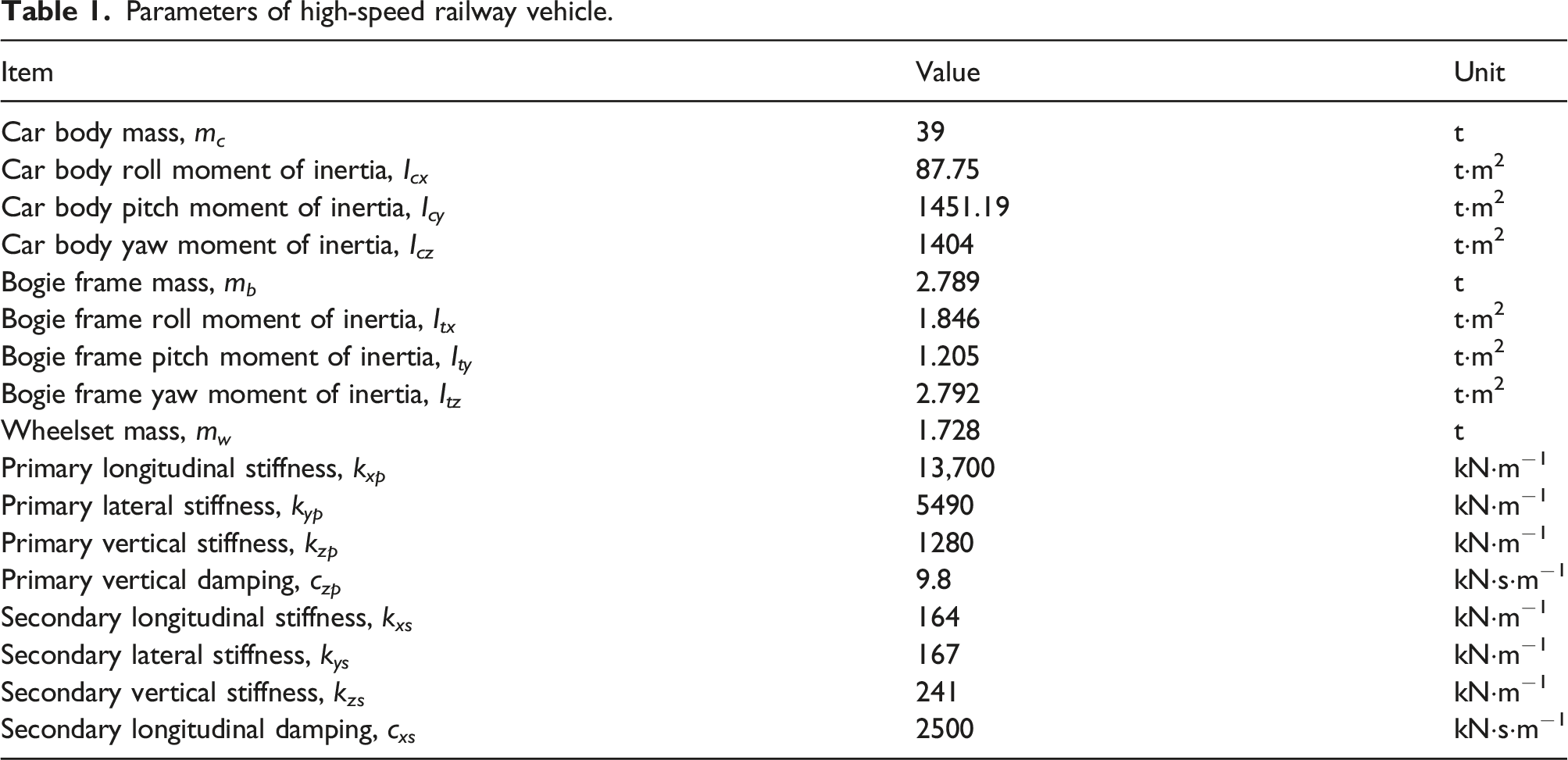
Parameters of high-speed railway vehicle.
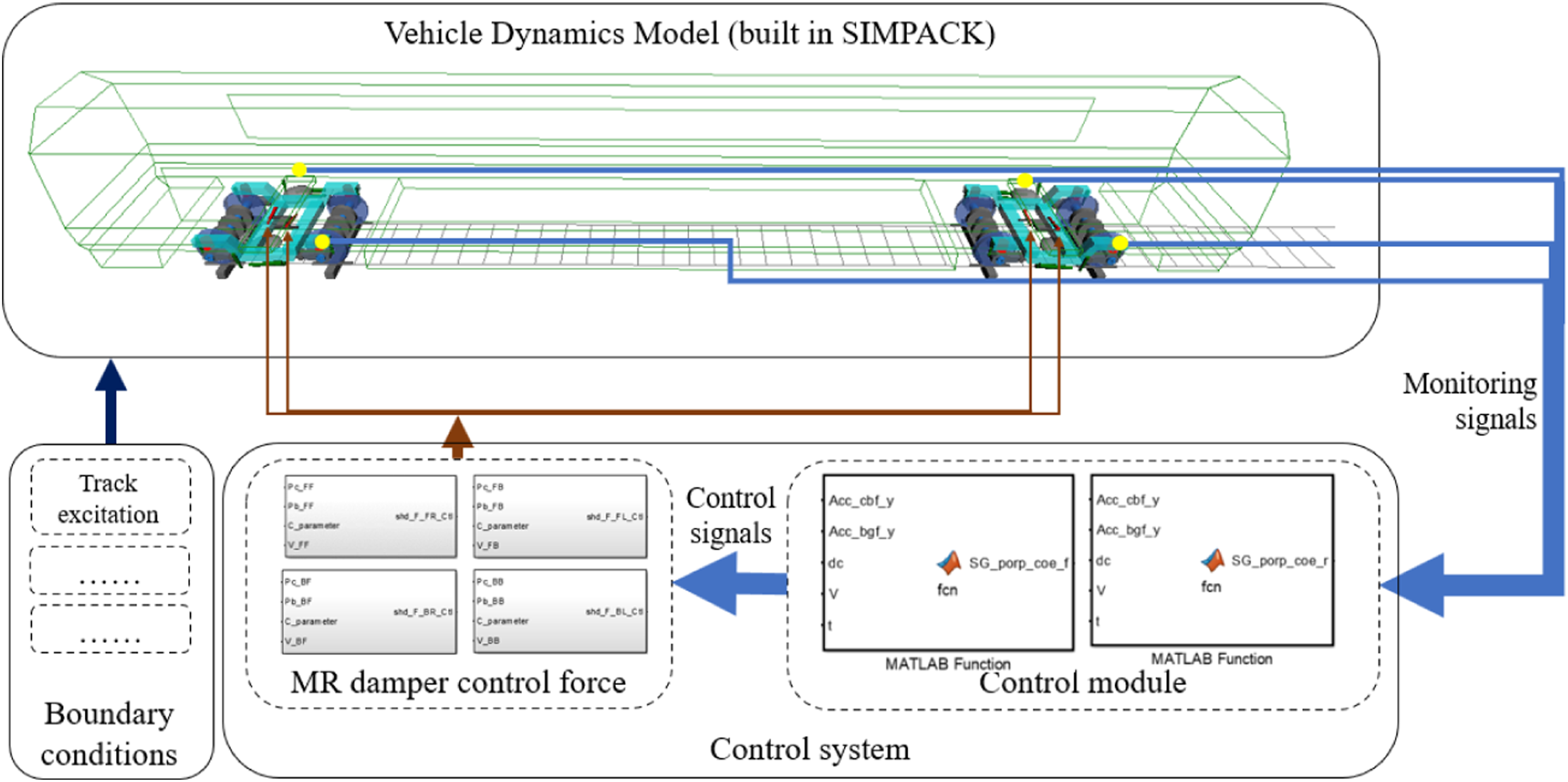
Co-simulation model of vehicle with semi-active lateral suspension control.
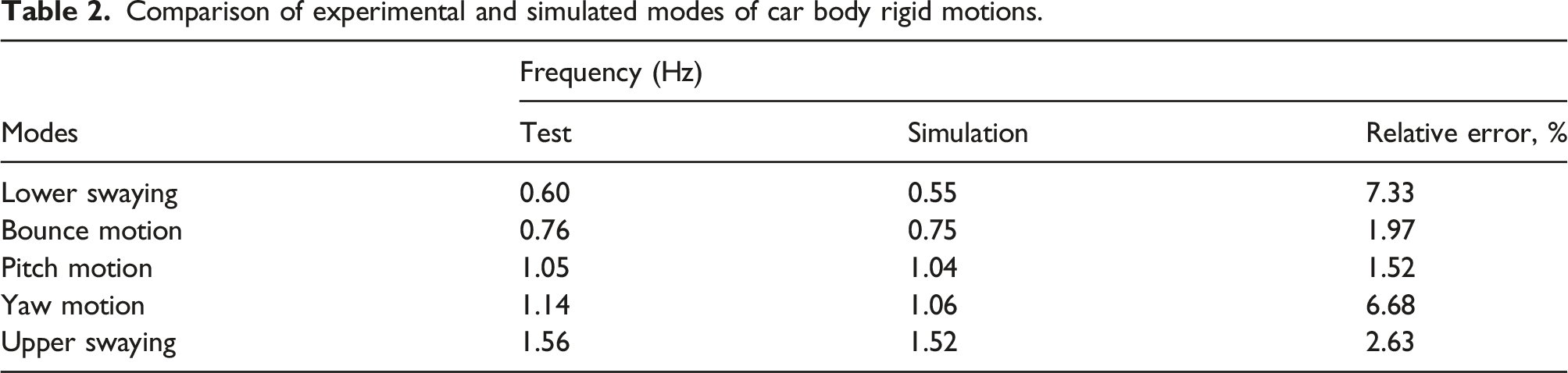
Comparison of experimental and simulated modes of car body rigid motions.
Magnetorheological damper model
In this paper, the viscoelastic-plastics (VEP) model is adopted to describe the MRD, which has fewer parameters and higher accuracy compared to the conventional Spencer and Pang viscoelastic-plastic models.
20
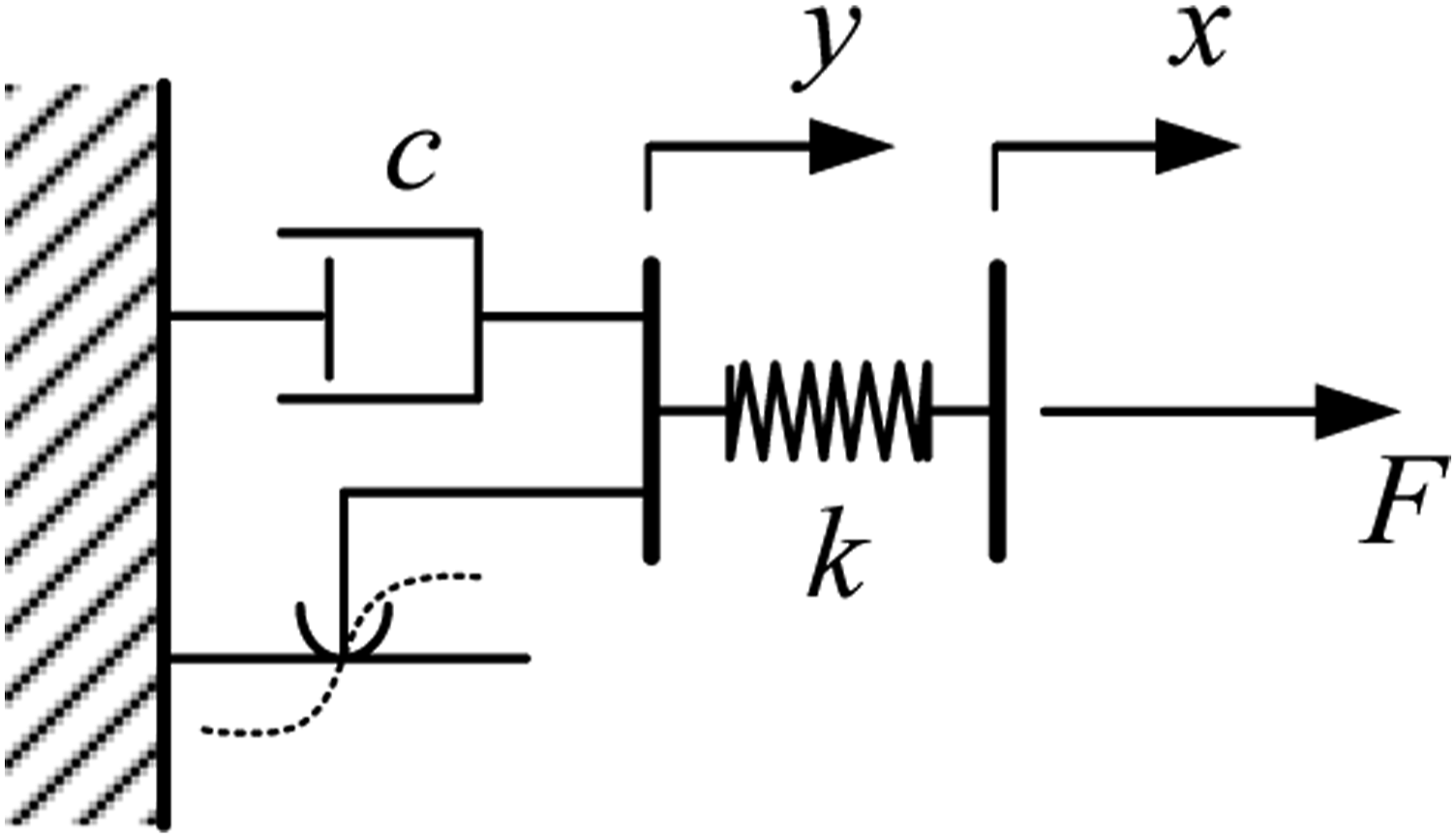
The model is shown in Figure 2 and can mathematically be described as follows VEP model of an MRD.
MDR VEP model parameters.

MRD test conditions.

Figure 3(a) shows the analytical and experimental MRD force-velocity relationships for different currents, from which it can be seen that the force increases with the rise of control current I. The analytical results are similar to the experimental ones, which demonstrates that the model parameters are suitable for simulating the MRD. Figure 3(b) shows the VEP model can accurately describe the hysteresis loop characteristics of the MRD, in which the force increases with the rise in the excitation frequency. Force-velocity relationships for (a) different currents and (b) various excitation frequencies.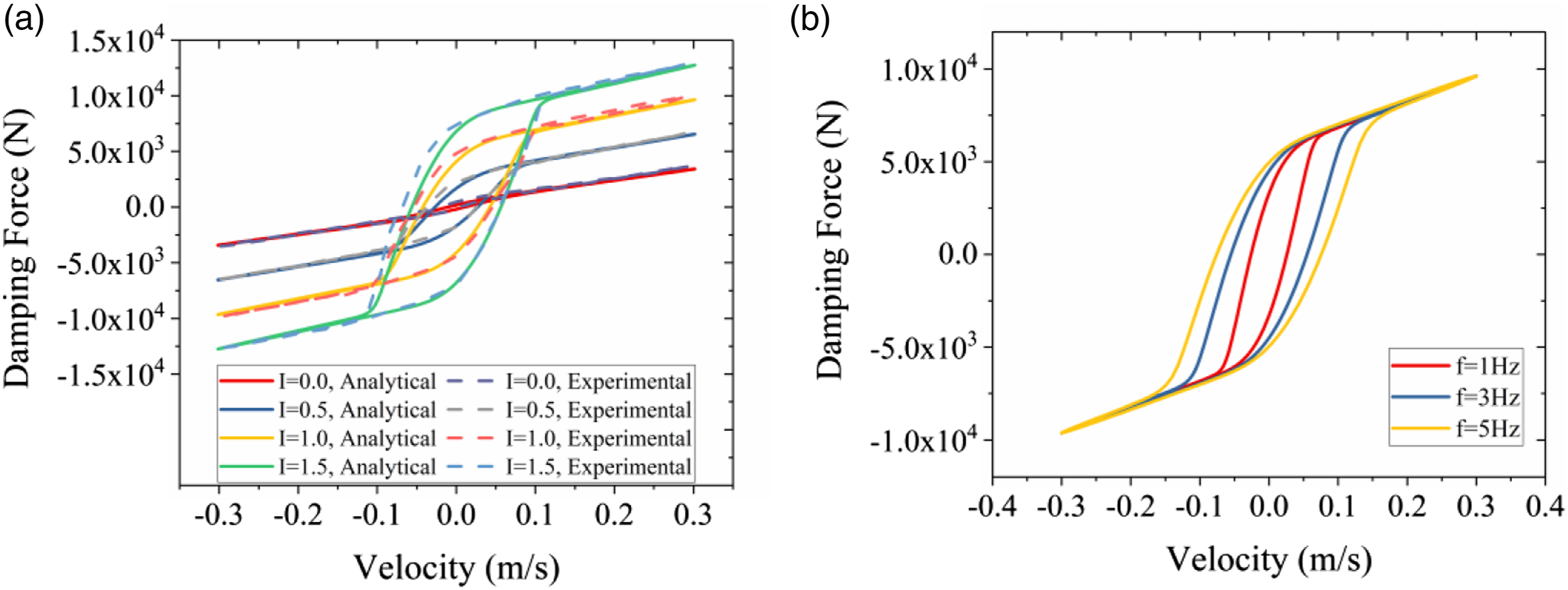
In this work, a nonlinear autoregressive exogenous (NARX) neural network model is proposed to determine the MRD inverse model. The NARX is a dynamic neural network, which has several advantages compared to the static neural network, such as memory ability and capability to approximate nonlinear functions.
21
The NARX neural network is composed of a time delay layer, input layer, hidden layer, and output layer, and can be expressed as follows
The MRD force can be acquired for random normally distributed currents and piston displacements. The displacement and damping force of the damper are set as inputs, while the current is the output of the model. The maximum amplitude of the displacement is set as 2 mm, and maximum frequency and amplitude of the input current as 5 Hz and 2 A, respectively. The simulation time of VEP model is 30 s at 1000 Hz. The numbers of training, verification, and test samples are 21,000 (70%), 4500 (15%), and 4500 (15%), respectively. The input and output values are assumed from 0 to three and 0–2 unit time delays, respectively, and the number of hidden layer neurons is assumed from 3 to 15. The activation functions of the hidden and output layer are the Tansig and Purelin functions, respectively.
Because random initial values are used in the neural network, 10 sets of displacements and forces from the VEP model are selected to assess the trained models. The correlation coefficient, R, and RMSE are defined to evaluate the results Comparison of predicted and actual currents for different delays: (a) correlation coefficient R, and (b) RMSE.

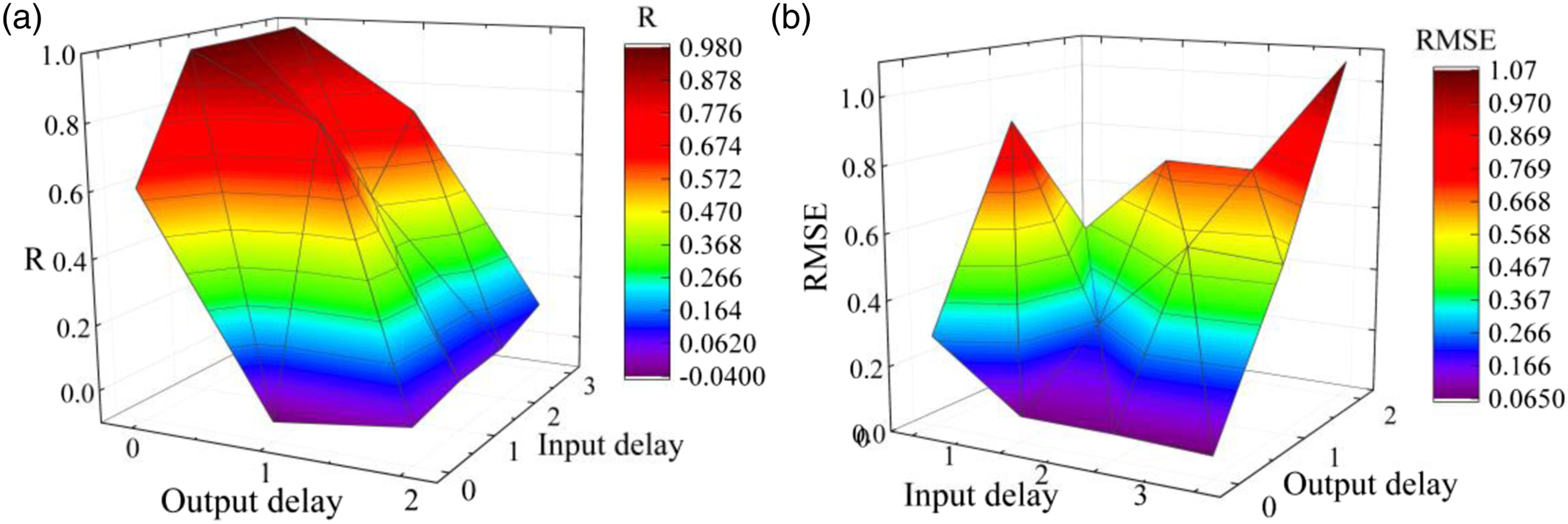
Figure 4(a) and (b) indicate that a larger input delay and a smaller output delay can be beneficial for accurate MRD modelling. Thus, the parameters of the MRD inverse model are selected as follows: input delay as 3, output delay as 0, and number of hidden layer neurons as 15. The maximum correlation coefficient, R, of the 10 random datasets is 99.19%, while the minimum one is 98.83%. The predicted and actual currents are shown in Figure 5, which proves that the trained neural network agrees very well with the analytical MRD inverse model. Comparison of actual and predicted currents.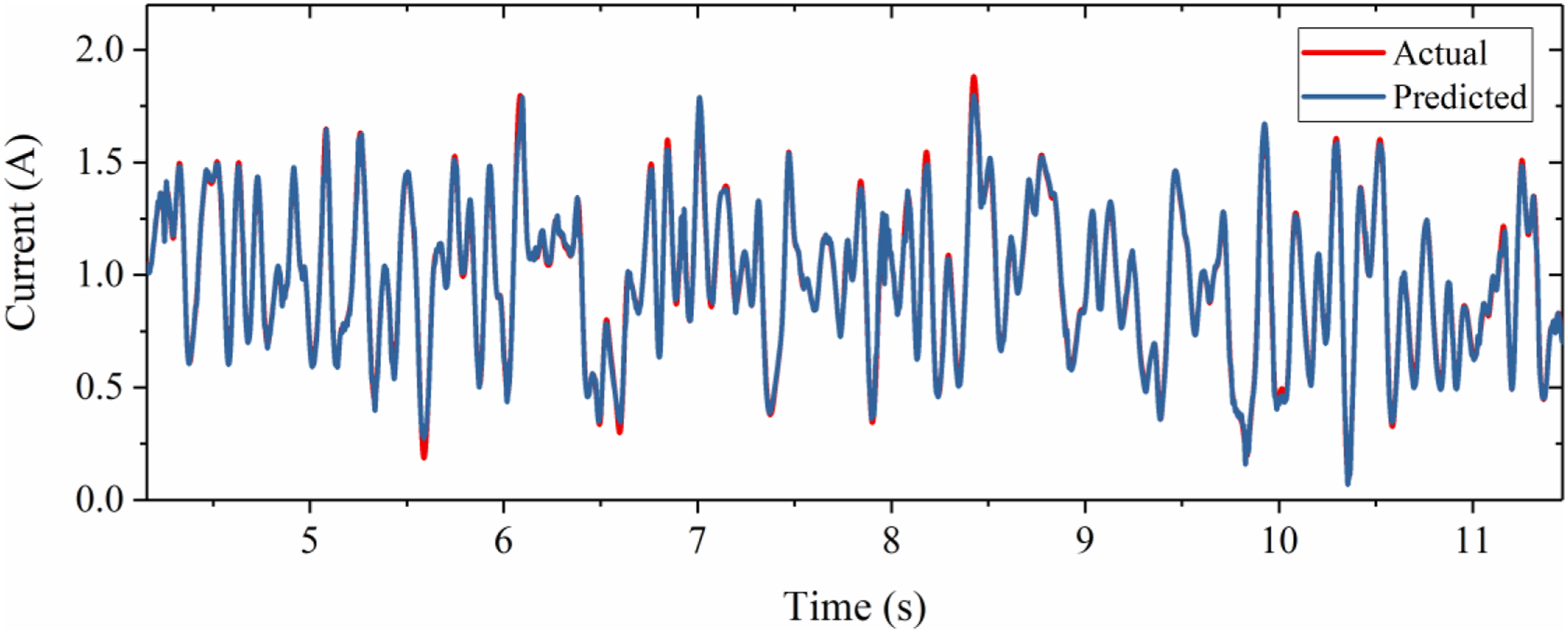
Control strategy and algorithm
Mixed SH-ADD control strategy
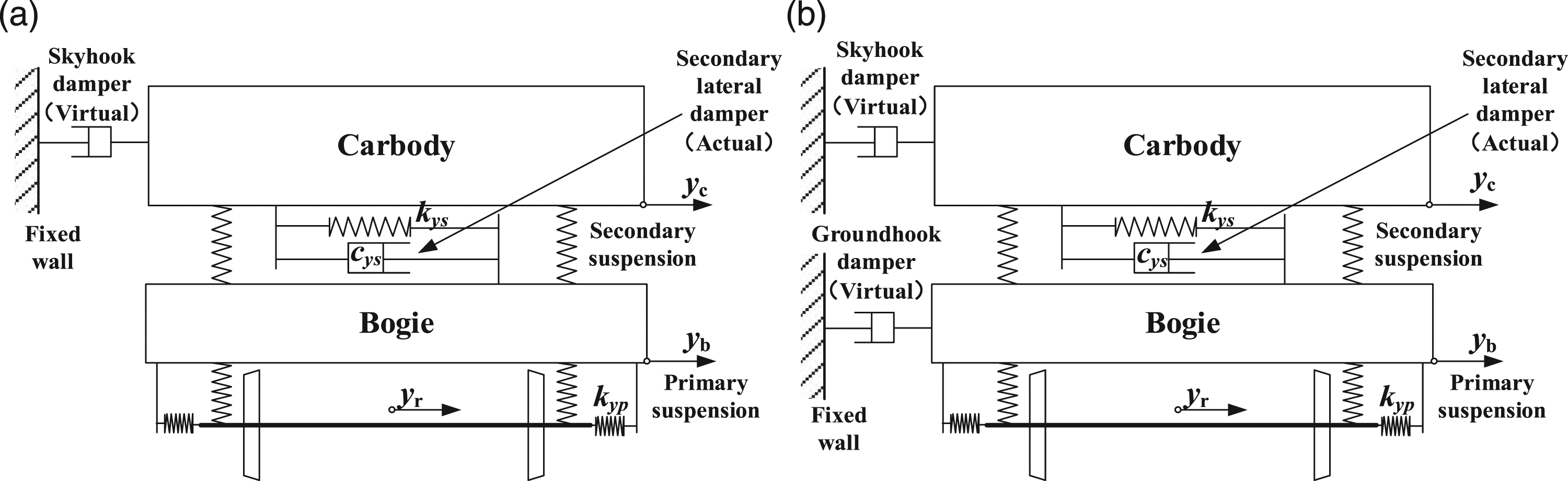
To analyze the performance of the proposed control strategies, a simplified quarter-car vehicle lateral dynamic model with two DOFs is formulated as depicted by Figure 6(a), whose mathematical model is as follows 2-DOF vehicle model with (a) SH control strategy and (b) Modified hybrid control strategy.



The variance gain is a conventional quantity used to verify the effectiveness of a control algorithm ,
14
and it is computed as follows
The car body variance gain under different control strategies are shown in Figure 7,which indicates that the SH control can effectively reduce the low-frequency vibrations, while the ADD control can provide a strong attenuation in the high-frequency range. The mixed SH-ADD algorithm combines the advantages of the SH and ADD approaches and the car body vibrations can be further suppressed. Thus, the mixed SH-ADD control strategy is adopted to suppress the car body vibrations in this study. Car body acceleration transmissibility for different control strategies.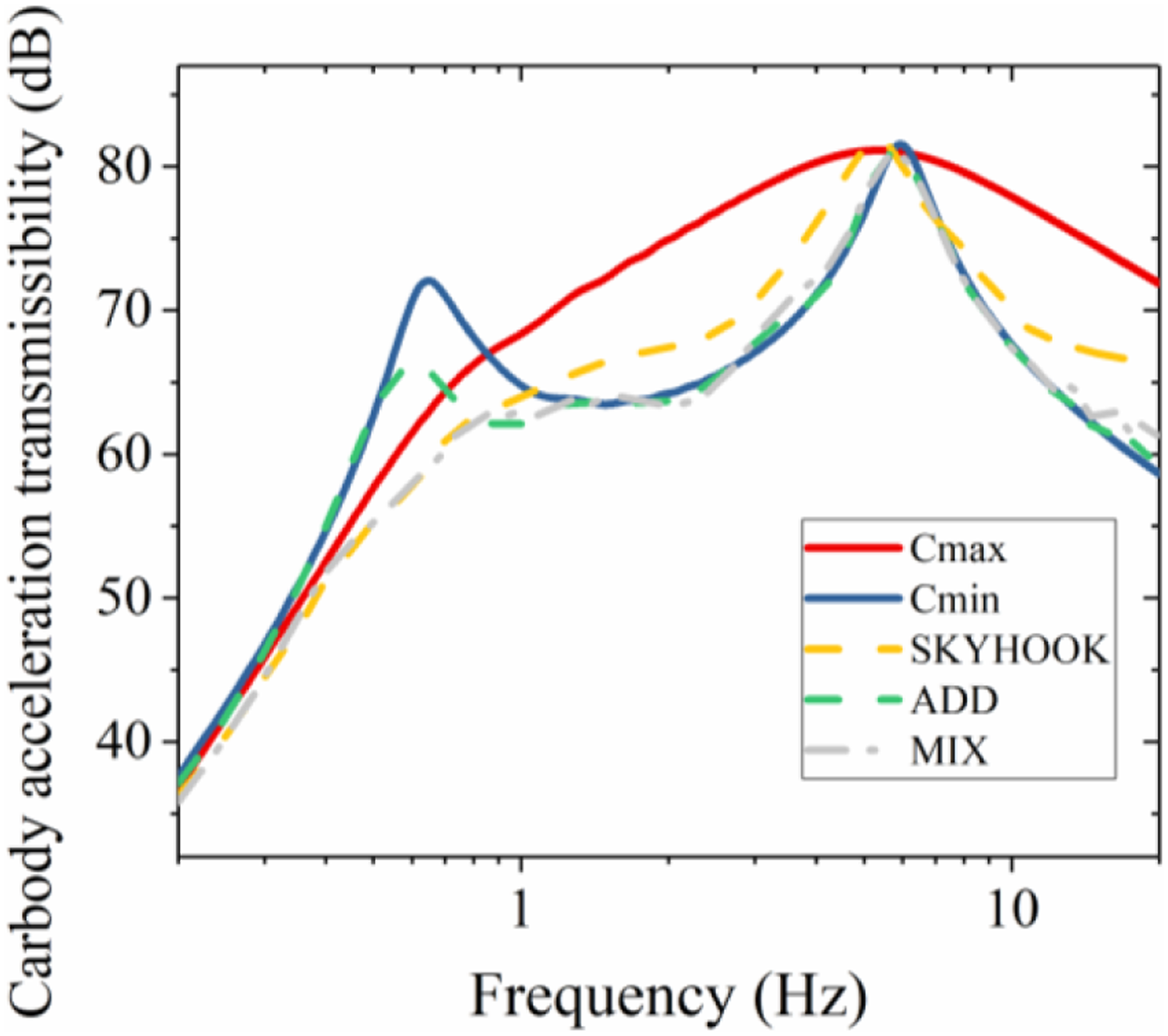
Modified hybrid control strategy
As reported,
17
the SH control strategy increases the bogie vibrations while restraining the car body vibrations, and the SH-ADD strategy has the same control characteristics. Thus, a modified hybrid control strategy is introduced to overcome this drawback. The SH-ADD and GH control strategies are naturally complementary and the car body vibrations can be reduced by the former while the bogie oscillations can be suppressed by the latter. The vehicle dynamic performance can be improved comprehensively by combining the two strategies, thus a modified hybrid damping control strategy combining the SH-ADD and GH algorithms is proposed as follows, which is shown in Figure 6(b)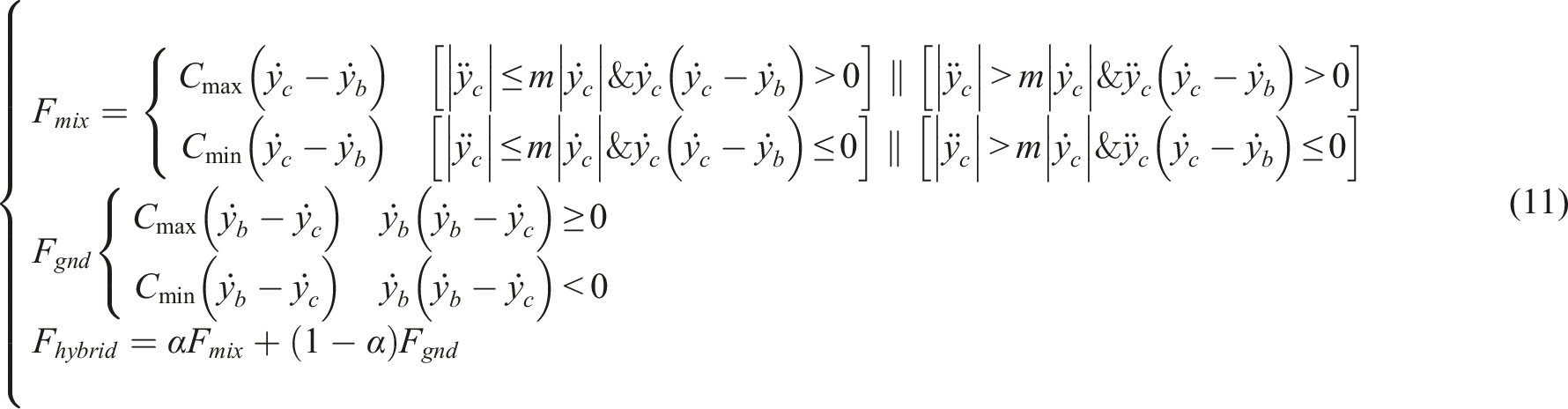
Self-adjusting hybrid damping control strategy
A previous study shows that larger values of the hybrid damping coefficient, α, (equation (10)) are beneficial for suppressing the motion of a sprung mass (car body), while smaller values of α can effectively restrain the vibrations of an unsprung mass (bogie).23,24 However, the adjustment strategy of α has not been studied. Due to time-varying nature of external excitation, a fixed α cannot guarantee meeting the vibration suppression requirements when a high-speed train runs on an existing track, thus this paper proposes an adaptive hybrid damping control strategy utilizing a fuzzy controller.
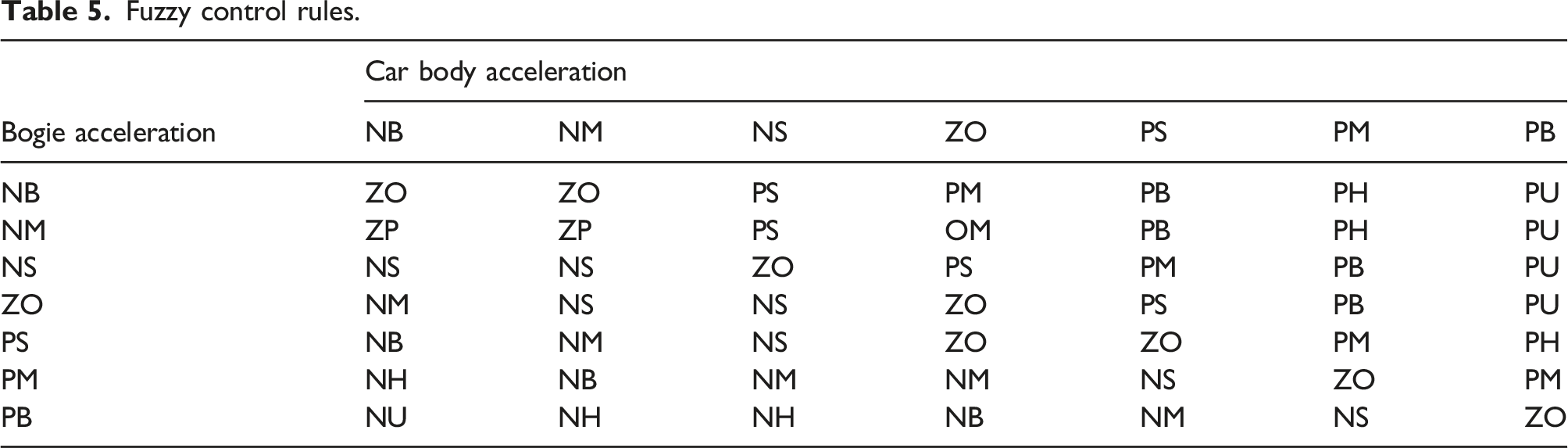
Fuzzy control rules.
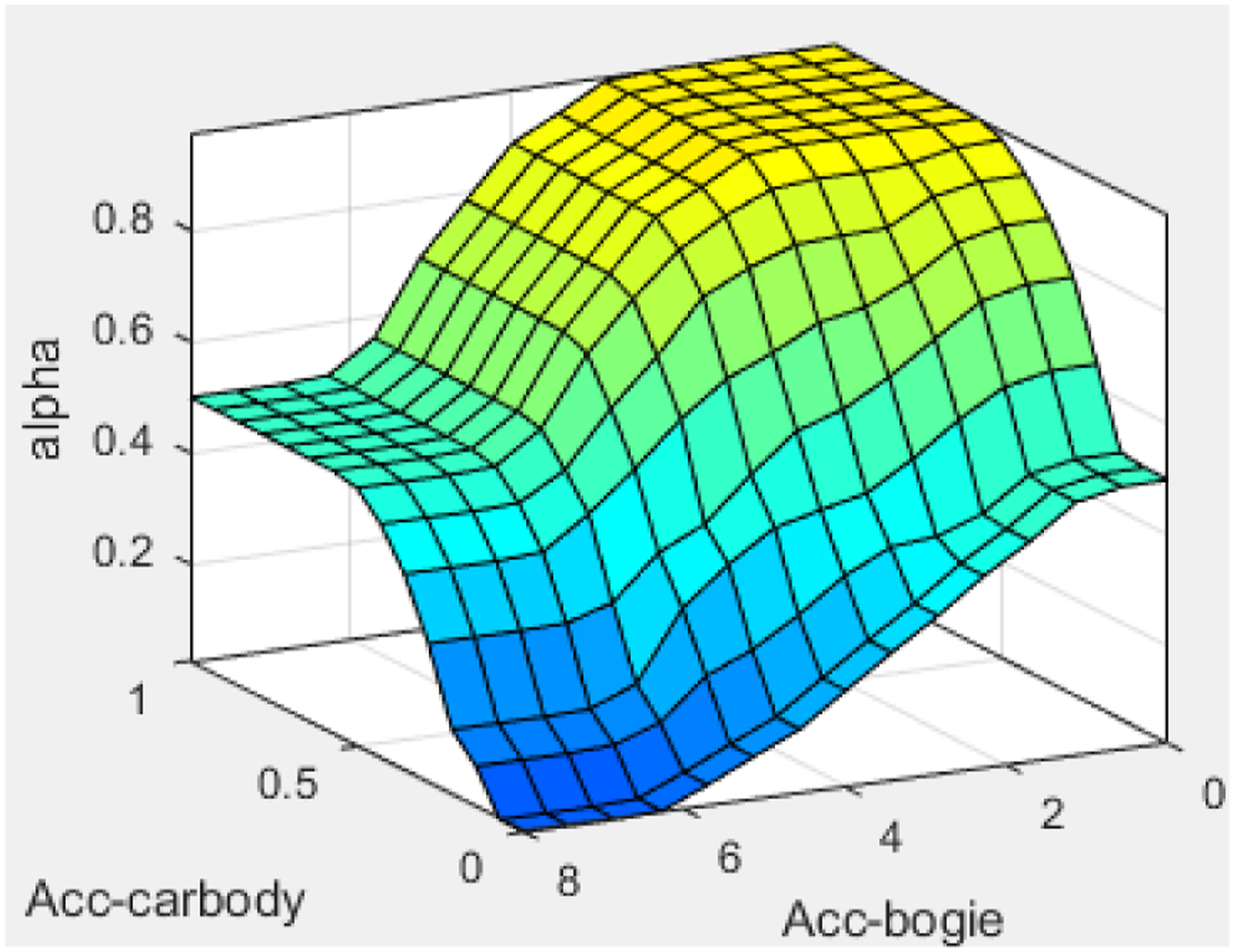
Output surface of fuzzy controller.
To verify the performance of the fuzzy controller, the relationships between acceleration, lateral Sperling index, and α are shown in Figure 9. The lateral accelerations of the car body and the bogie frame are normalized by multiplying the original data by 1/4 and 1/0.3, respectively. Relationship between SAHDC hybrid damping coefficient α, vibrations of car body and bogie frame, and lateral Sperling index.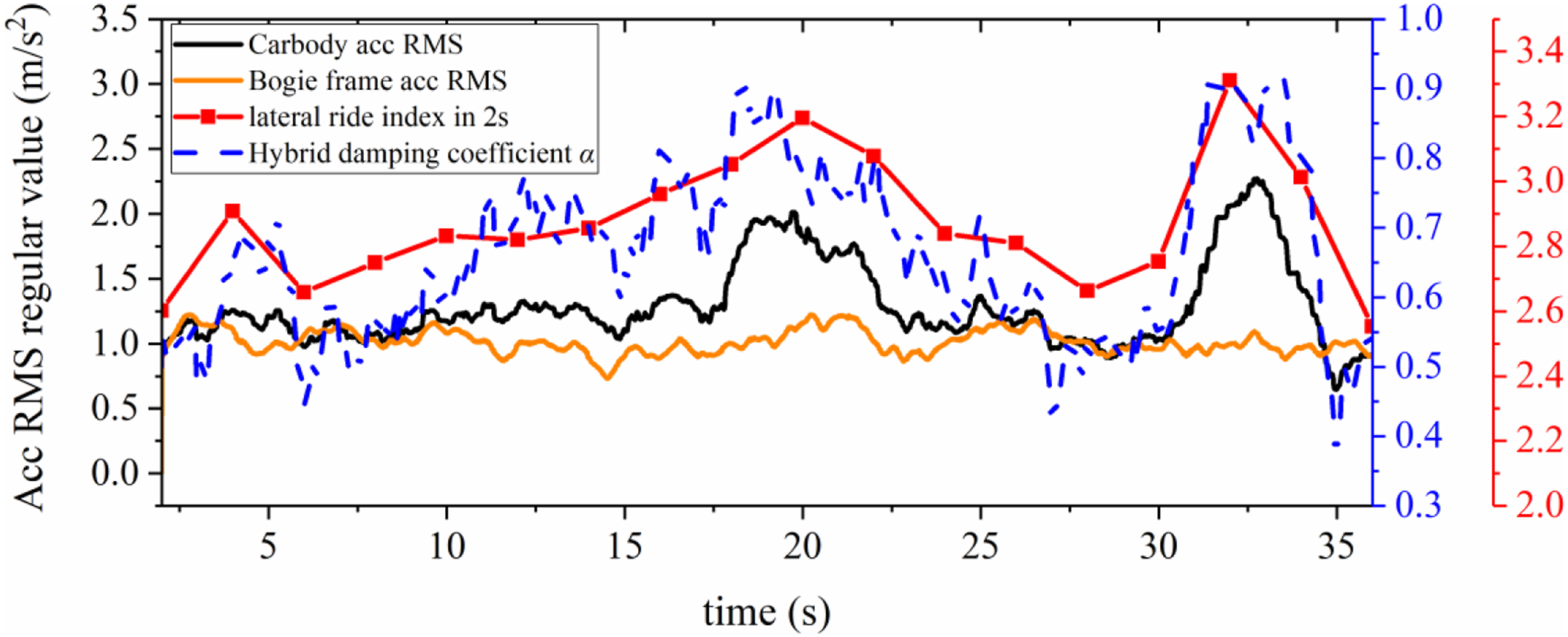
Figure 9 shows that α is relatively large when the car body regular accelerations are larger than those of bogie, while α is relatively small when the opposite is true. This indicates that the fuzzy controller can efficiently adjust α based on the vehicle oscillations. The values of α when using the fuzzy controller is positively correlated to the ride index, which shows that the self-adjusting control algorithm can ensure the adequate suppression of frame lateral vibrations and improve the operating safety when the car body vibrations are small.
However, a high-speed train can be subjected to sudden lateral impacts while passing through existing track turnouts, because of the harder primary suspension used to ensure the vehicle stability. Nevertheless, the car body vibration is still small even if a small α is adopted when the turnout passing speed is low. Therefore, zero α value can be used when the speed is less than 50 km/h.
The SAHDC strategy, designed for the high-speed train running on existing tracks can be expressed as equation (11) and the following correction on the hybrid coefficient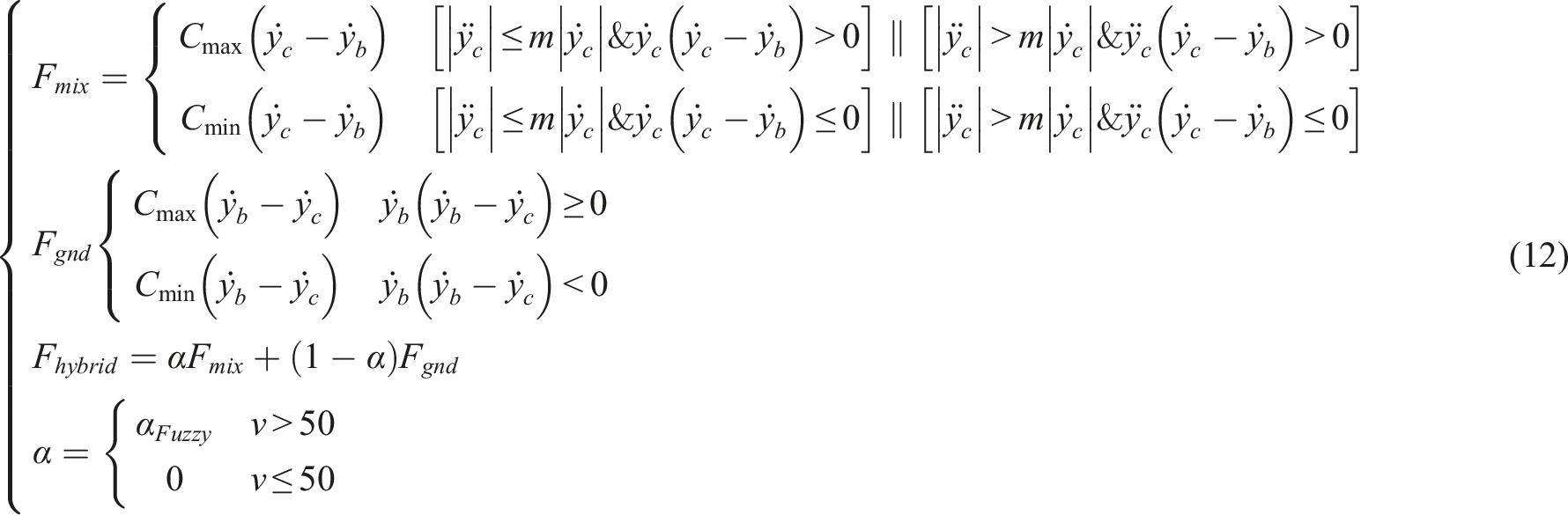
Numerical simulations and discussion
The following numerical vehicle simulations use the SIMPACK model explained in Multibody model of high-speed vehicle system.
Track geometry and irregularity
There are three typical existing track geometries that need to be considered in simulations: tangent and curved track and the turnout. The tangent track has a length of 5000 m, and it is 300 m for the curved track. The radius of the circular track is 1500 m (referred as R1500) with a superelevation 175 mm on the outer rail. A transition track connects the tangent and curved track and has a length of 300 m. For the specific curve, its balancing passing through speed shall be 180 km/h. The turnout is type SC330, as shown in Figure 10. The passing speed is 45 km/h, and radius of turnout transition is 350 m. The track irregularities were measured on the Jinan-Qingdao line, one of the typical existing lines in China. Turnout used in numerical simulations.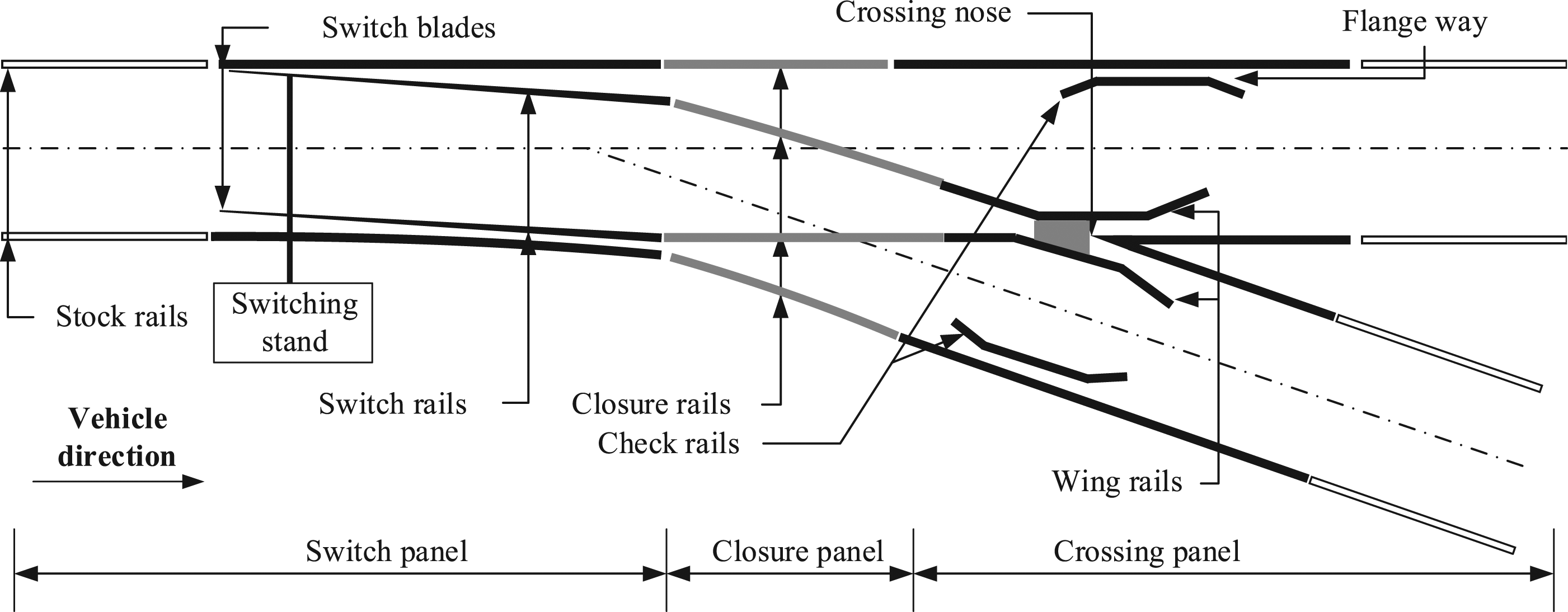
Tangent track case
The Sperling index, W, also referred to as the ride index, is widely used to evaluate the ride quality of railway vehicles. It is defined as follows
To examine the vehicle vibrations while running on an existing railway, the vehicle speed was set as 200 km/h and worn wheel profiles were used. In numerical simulations, four cases are compared, namely the passive suspension (no control), SH-ADD, GH and SAHDC control strategy on the lateral damper. Figure 11(a) shows that the Sperling index is reduced from 2.79 to 2.21 when the SH-ADD control strategy is adopted, both the peak and mean values are reduced by nearly 20%, and the ride comfort is improved from satisfactory to excellent. When the GH control is used, the peak value rises to 2.87 and exceeds that when passive suspension (no control) is applied. Using the SAHDC control, the ride index drops from 2.79 to 2.46, which proves that the SAHDC strategy can improve the ride quality significantly. Figure 11(b) shows that the car body lateral accelerations with SH-ADD damping control experiences the lowest and the RMS of acceleration is reduced by nearly 53% from 0.288 m/s2 to 0.135 m/s2. The improvement provided by the SAHDC is between SH-ADD and GH strategies with a value of 0.209 m/s2. The bogie lateral acceleration without control is 0.790 m/s2 and the RMS rises from 0.697 m/s2 to 1.093 m/s2 when applying the GH and SH-ADD controls, while it is 0.907 m/s2 for the SAHDC. The safety indices, wheelset lateral force and derailment coefficient, are shown in Figure 11(c). Among the four simulated cases, the SH-ADD control case has the maximum wheelset lateral force of 10.04 kN, and GH control experiences the minimum of 8.23 kN. While it is 9.46 kN for the SAHDC case, which is slightly larger than that for the passive case as 9.37 kN. The derailment coefficient is 0.112 for the SH-ADD control, and it falls by 16% from 0.112 to 0.094 when the α is reduced from one to 0. The derailment coefficient under SAHDC case is 0.105, close to that under passive case. Comparisons between passive, SH-ADD, GH and SAHDC controls, (a) lateral Sperling index, (b) RMS of acceleration on car body and bogie frame, and (c) wheelset force and derailment coefficient on the tangent track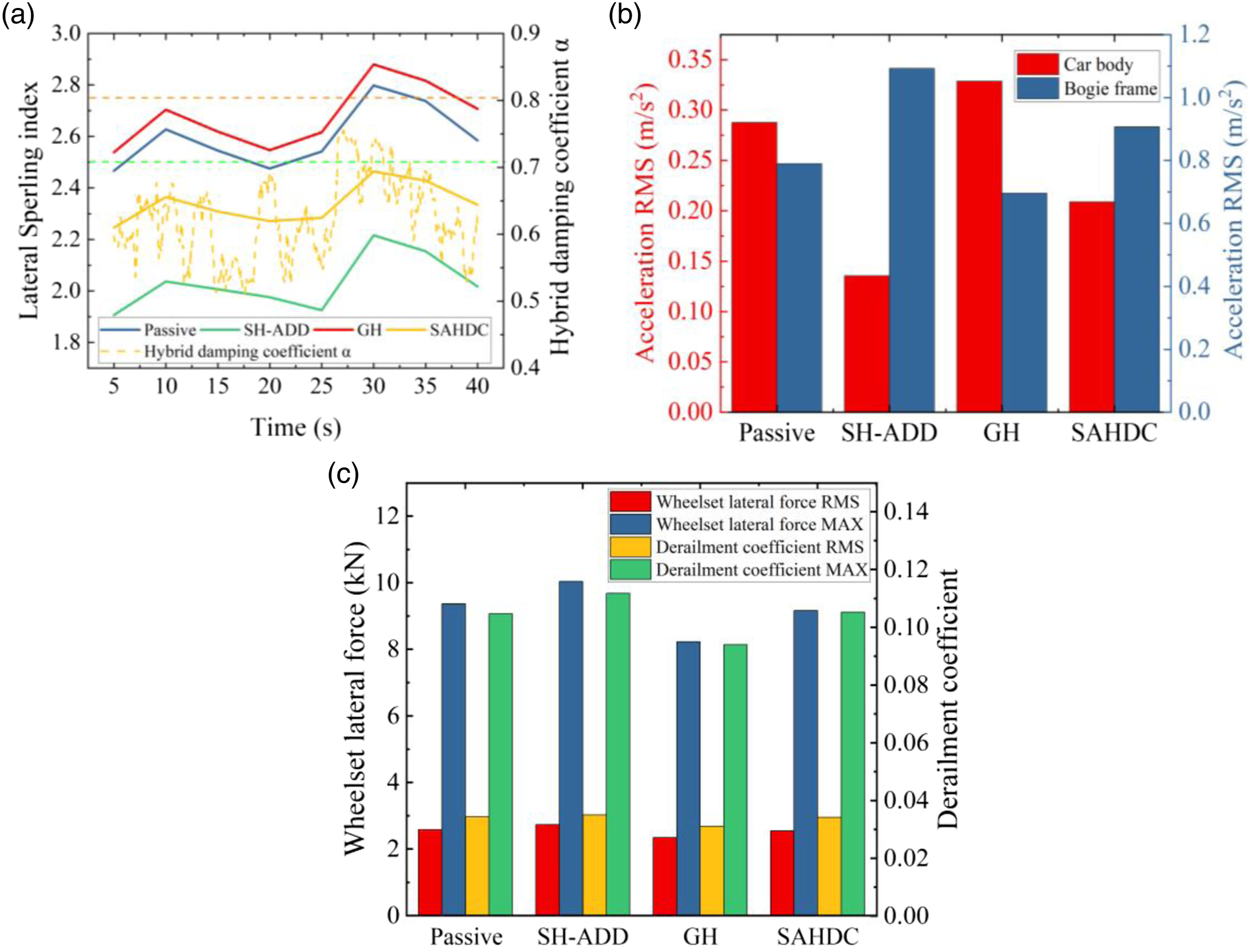
Based on the above comparisons, the SAHDC strategy can not only efficiently improve the ride quality but suppresses the aggravation of oscillations of the bogie frames and wheelsets as well when a high-speed train runs on existing tracks.
Curve negotiation scenario
Refer to the curved track geometry defined in Track geometry and irregularity, the vehicle speed is set as 180 km/h in the curve negotiation scenario and the simulated results are presented in Figure 12. Figure 12(a) demonstrates that the lateral Sperling index can be obviously enhanced by the SH-ADD control. However, when the GH is used the ride quality deteriorates to only satisfactory, while the index is also excellent for the SAHDC strategy. Figure 12(b) illustrates that, with respect to the RMS of acceleration of 0.232 m/s2 under passive case, it drops by 44.2% to 0.129 m/s2 by the SH-ADD control, rises to 0.254 m/s2 under GH control, reduces to is 0.178 m/s2 for SAHDC. Whereas the acceleration on bogie rises by 22.5% from 0.620 m/s2 under passive case to 0.760 m/s2 under the SH-ADD control, while it is reduced to 0.547 m/s2 by the GH control. The SAHDC has a value of 0.665 m/s2, close to that under passive case. As plotted in Figure 12(c), The SH-ADD slightly deteriorates the wheelset lateral force and derailment coefficient compared to passive suspension, from 16.02 kN to 17.75 kN and 0.245 to 0.254, respectively. While they are reduced to 15.24 kN and 0.220 by the GH control. The SAHDC case shows similar but better results than that under SH-ADD control. Comparisons between passive, SH-ADD, GH and SAHDC controls, (a) lateral Sperling index, (b) RMS of acceleration on car body and bogie frame, and (c) wheelset force and derailment coefficient on the curve negotiation scenario.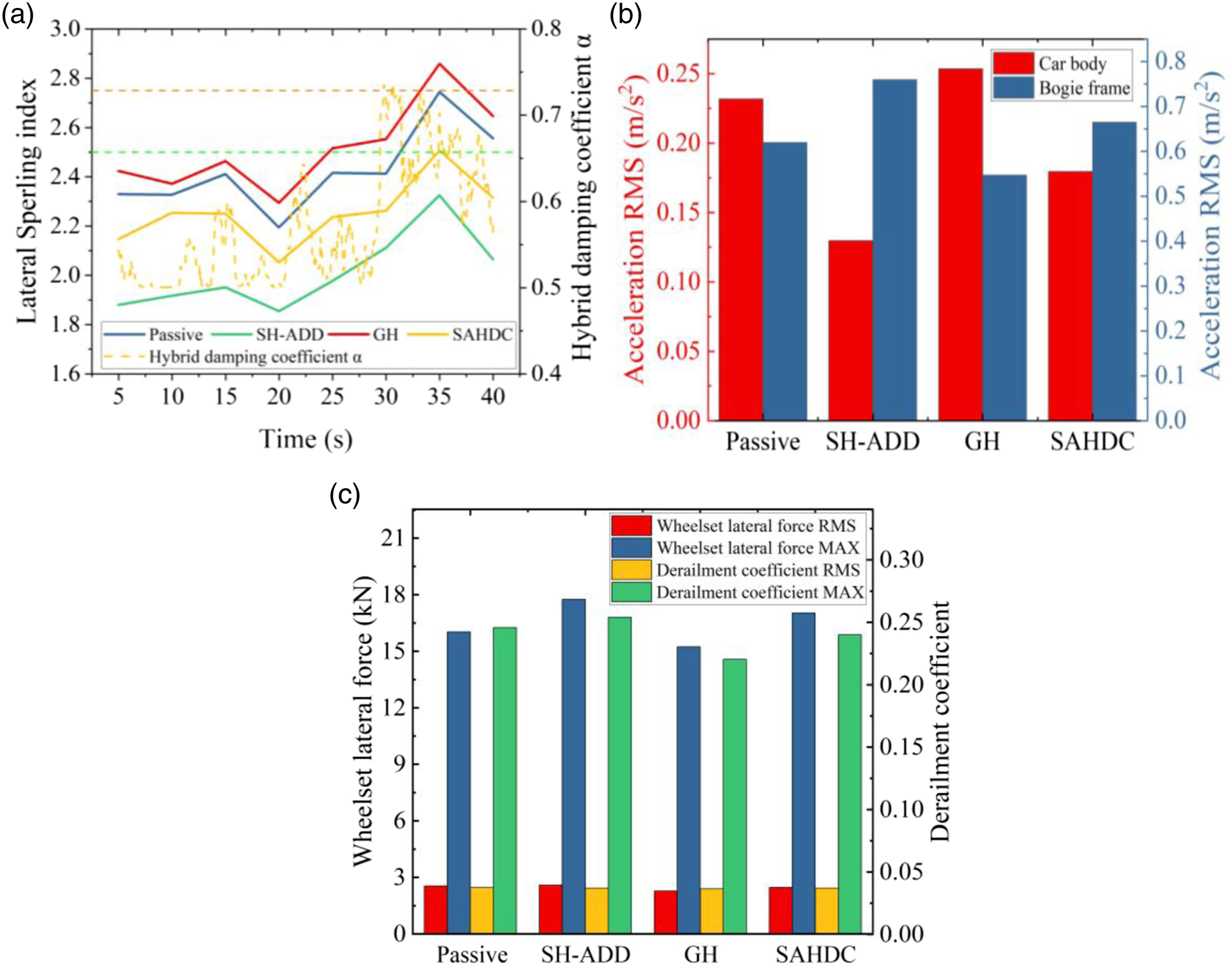
Vehicle running through turnout
Vehicle passage through a turnout is simulated and analyzed in this section using the previously introduced turnout geometry.
Two peaks in the derailment coefficient for passive suspension, 0.49 and 0.46, can be seen in Figure 13(a). The first peak of the derailment coefficient increases to 0.52 for the SH-ADD control but the second peak can be effectively suppressed. For the SAHDC control, as α decreases the first peak of derailment coefficient gradually decreases to 0.35, while the second peak gradually increases. The peak in the derailment coefficient caused by the impact of the strike against check rails at around 17.5 s is between 0.62–0.65, indicating that changing α values has no apparent effect on this peak. Furthermore, this spike in the derailment coefficient here is caused by the inner side of the right wheel striking the check rail and it will not lead to derailing during actual operation. Figure 13(b) shows that the bogie lateral acceleration is 6.459 m/s2 when the vehicle with passive suspension enters the turnout, while the peak value rises to 7.464 m/s2 for the SH-ADD control and decreases to 5.742 m/s2 for the SAHDC. Figure 13(c) shows that the car body lateral acceleration peak caused by the impact of switch blade can reach 1.056 m/s2, but can be suppressed by the SH-ADD control. For the SAHDC, when α is reduced to 0.5 the value increases to 0.851 m/s2 and the peak reaches 1.103 m/s2, which exceeds the value for the uncontrolled system. On the other hand, the car body lateral acceleration caused by the impact against the check rail is larger than the value when the vehicle enters the turnout. The lateral acceleration peak is 2.391 m/s2, but can be reduced to 1.517 m/s2 by the SH-ADD control. However, as α decreases, the peak value of the car body lateral accelerations can increase and even exceed the peak value without control, reaching 2.470 m/s2 for the SAHDC. Vibrations of vehicle passing through turnout with different control strategies: (a) derailment coefficient, (b) bogie frame lateral accelerations, and (c) car body accelerations.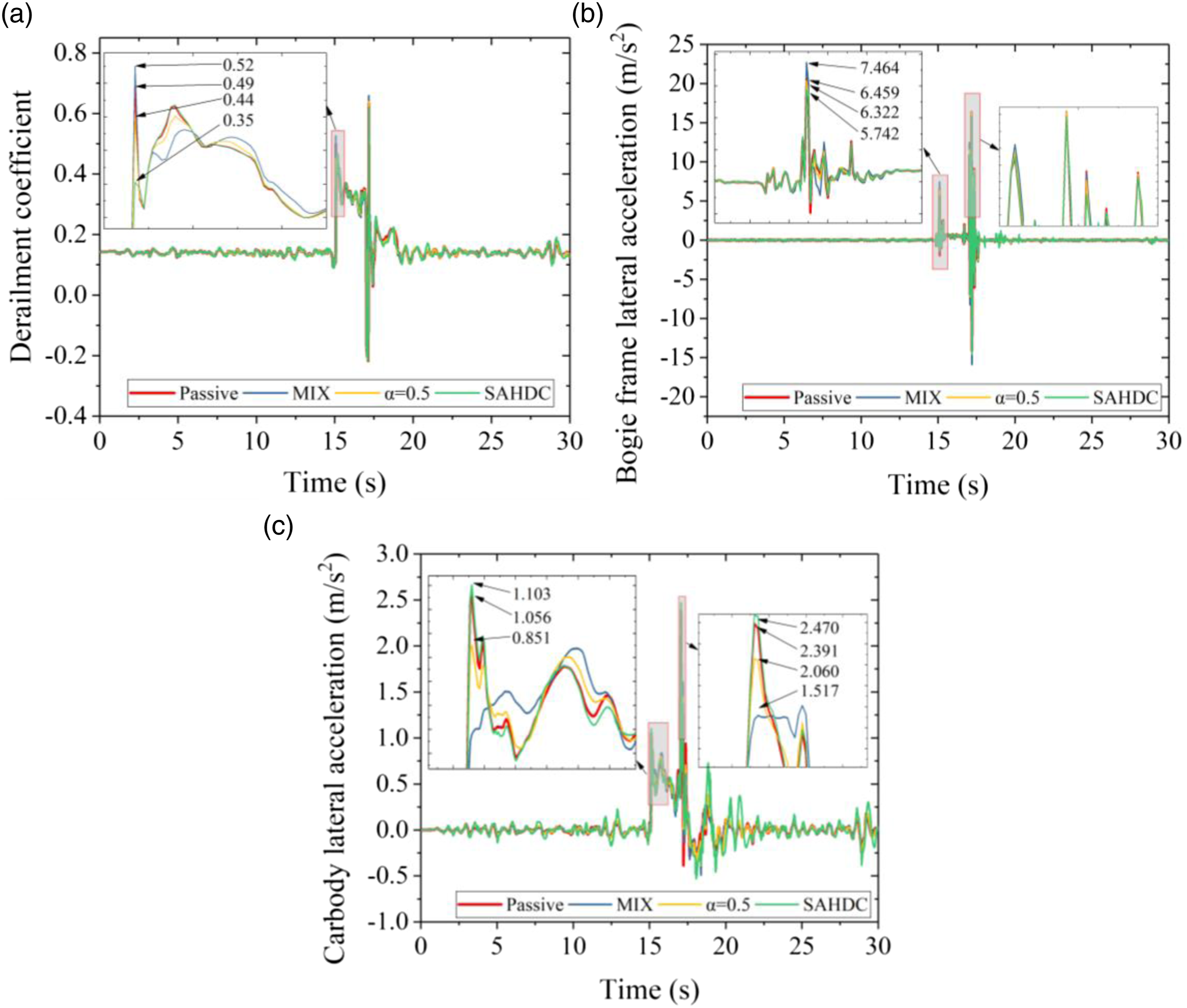
This analysis shows that the SAHDC can also effectively reduce the derailment risk and partly suppress the lateral impact of the bogie frame compared to the other control strategies. However, the car body vibrations will worsen. While the turnout negotiation scenarios ususally occurs at low speed, 45 km/h for the examined case, the car body vibration is still acceptable.
Conclusions
Because the new high-speed and the existing tracks differ a lot, this paper developed a novel adaptive hybrid damping control strategy for the high-speed trains to satisfy the running vehicle performance requirements on different types of tracks. Compared to the previous approaches or control algorithms, the proposed SAHDC can adjust the value of hybrid damping coefficient and reduce the car body vibrations to an acceptable level. This algorithm works effectively on straight and curved tracks, without worsening the bogie and wheelset vibrations, and can adequately reduce the derailment coefficient when passing through a turnout. The novel control strategy can guarantee achieving the vibration suppression targets of the bogie frame while meeting the ride quality requirements. The following conclusions can be drawn from the presented work: (1) The VEP model can accurately describe the force-velocity relationship of the MRD. Compared to the conventional phenomenological model, the VEP model has fewer parameters with clear physical meanings. The NARX neural network model with appropriate parameters can simulate the MRD inverse model. (2) The SAHDC control strategy is proposed combining the mixed SH-ADD (instead of the conventional SH) and GH algorithms which adjusts the hybrid damping coefficient using a fuzzy controller to guarantee the vehicle running performance, such as vibrations of car body, bogie frame, and wheelset for high-speed vehicles running on existing tracks. (3) A high-speed vehicle model is formulated and verified. Using the model, the SH-ADD, GH and SAHDC strategies are studied. Compared to the other strategies, the SAHDC can effectively adjust the hybrid damping coefficient based on vehicle vibrations and can balance the high-speed vehicle ability to negotiate curves and turnouts on existing tracks while satisfying the ride comfort.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No.U2034210), and the Independent Research and Development Project of the State Key Laboratory of Traction Power (Grants No. 2021TPL-T05).