
Abstract
This study proposes a new configuration of asymmetric base-isolation coupling system for the vibration control of twin buildings, and also presents an efficient design method of using a hybrid optimization technique integrated with preference-based dimensionality reduction technique. The purpose of the proposed optimization approach is to guarantee the compromise optimal solution of well-balancing the mutually conflicting design objectives. In order to demonstrate the proposed approach, the adjacent 20-story twin buildings subjected to earthquake excitations were adopted as target buildings and it was verified through numerical examples that the proposed optimization technique can successfully find the optimal solution to achieve various design objectives in a balanced manner. The seismic performance was also compared with the existing different-story connection system with uniform distribution of dampers. The comparative results of the seismic performances between two systems clearly demonstrate that the proposed system can achieve great performance improvement over the existing system while maintaining balanced design preferences. Thus, it can be concluded that the proposed system can be a very effective system for the vibration control problem of the twin buildings.
Keywords
Introduction
Vibration control of twin buildings is a challenging problem due to the lack of phase difference between two buildings. As observed in the previous studies,1–7 the dampers to interconnect two adjacent buildings at the same floor have been recognized as a very efficient way to control two adjacent buildings with different frequency characteristics. However, such inter-building connection dampers do not produce any significant damping effect when the two buildings vibrate with similar frequency characteristics.8–10 This is due to the fact that the damper force depends on the relative displacement or relative velocity between the two ends of the damper and the two buildings with similar frequency characteristics do not show any significant difference in the relative responses between the two ends of the damper. More specifically, the relative displacement and the relative velocity of the connecting damper between the two identical structures will become close to zero, which leads to the resultant damping force being small and meaningless in control effect.
In order to overcome such difficulties in controlling adjacent twin buildings with the inter-building damper connection approach, some researchers have focused on how to amplify the relative response of the two ends of the damper. Accordingly, they proposed a slightly modified configuration in which the two buildings are interconnected with dampers in a similar way as before but the dampers are installed to connect the different stories of the two buildings. For example, Makita et al. 11 proposed a cantilevered structure with a difference in connection height so that the two ends of the dampers are connected into different stories of the dynamically similar structures. Instead of connecting the same stories between two buildings, this different-story connection method enables the damper to exert the damping force on both buildings even for the twin buildings. However, as noted by the authors, the mechanism of the different-story damper connection method is conceptually the same as the conventional inter-story damper connection approach in a single building where the damper is connected between two stories of a single building in a diagonal bracing form. In other words, when the two buildings have identical dynamic properties and identical connector link, the equation of motion for the different-story-connected twin buildings can be interpreted as that for the different-story-connected single building but the dynamic properties such as mass, damping coefficient, and stiffness are doubled. With the same concept as that used by Makita et al., 11 Patel and Jangid 12 also proposed three configurations of inter-connecting damper distributions for the dynamically similar adjacent structures in order to amplify the relative response of the two ends of the damper in a different manner. Although the detailed configurations are different, these studies are conceptually similar to each other. These studies adopted a configuration of inter-building different-story damper connection, which can be regarded as a kind of inter-story damping connection approach in a single building.
As a new method for vibration control of adjacent twin structures, this study proposes an asymmetric base-isolation coupling system. The proposed control scheme started from the following facts: The existing inter-building connection method is very effective for two different buildings. For twin structures, however, it becomes invalid due to the behavioral symmetry or lack of phase difference. Then, we figured out the following question: Can we still utilize the benefits of the conventional inter-building connection method for the twin structures if the dynamic characteristics of the twin structures are intentionally made different from each other? In order to answer this question, the following configuration has been devised: One of the twin buildings is intentionally base-isolated to perturb the symmetry of the twin’s frequency characteristics, and then the two buildings, which were originally the same but changed to be different from each other by the base isolation, are coupled with the connecting damper as in the conventional inter-building connection method. Under these intentional asymmetric conditions, the proposed system is expected to be able to take full advantage of the control efficiency of the conventional inter-building connection approach.
The optimal design problem of the proposed asymmetric coupling system involves the simultaneous minimization of several conflicting measures in terms of performance and cost. The performance-related measures may include peak responses of the two buildings such as story drift, floor displacement, absolute acceleration, shear force, bending moments, and so on. The cost-related measures may include the total amount of control resources, such as damping capacity, stiffness amount, maximum damper force, and so on. In addition to these quantities, the maximum displacement of the base-isolation bearing also needs to be included in the design objective because the isolation system can cause the displacement of the building to be excessive. 13 In these regards, the optimal design of the proposed asymmetric base-isolation coupling system for the vibration control of twin buildings to be dealt with in this study entails many objectives to be minimized as well as many design variables to be explored. In order to deal with two issues such as simultaneous optimization of many objectives and exploration of many design variables, this study employs two methods such as a hybrid optimization technique 14 and a preference-based dimensionality reduction technique.15–17 The hybrid optimization technique is newly developed for searching the large design-variable space and is known to be efficient. The preference-based dimensionality reduction technique has been applied in literature15–17 to handle the conflict of many design objectives, thereby successfully leading to a well-balanced compromising solution between mutually conflicting multiple objectives. Unlike previous studies15–17 that used GA as an optimization method, this study uses a hybrid optimization framework as an optimization method. The hybrid optimization technique simultaneously uses three optimization methods such as particle swarm optimization (PSO), genetic algorithm (GA), and harmony searching algorithm (HSA), and selectively allows more participation of one method than the others. This participation adjustment of three optimization methods enables efficient search of large-scale design-variable space and rapid convergence to an optimal solution.
In order to demonstrate the proposed approach, example design has been performed with a system of 20-story twin buildings equipped with the proposed asymmetric base-isolation coupling system. The numerical results are then investigated in comparison with those of the conventional different-story damper connection system, followed by conclusions.
Problem Statement
Inter-building damper connection system
Figure 1 illustrates the conceptual drawing of the typical inter-building connection approach where the k-th and (k−1)-th floors of the two buildings are inter-connected by the dampers. If the coupling dampers correspond to a linear viscous damper, their damping forces are defined as

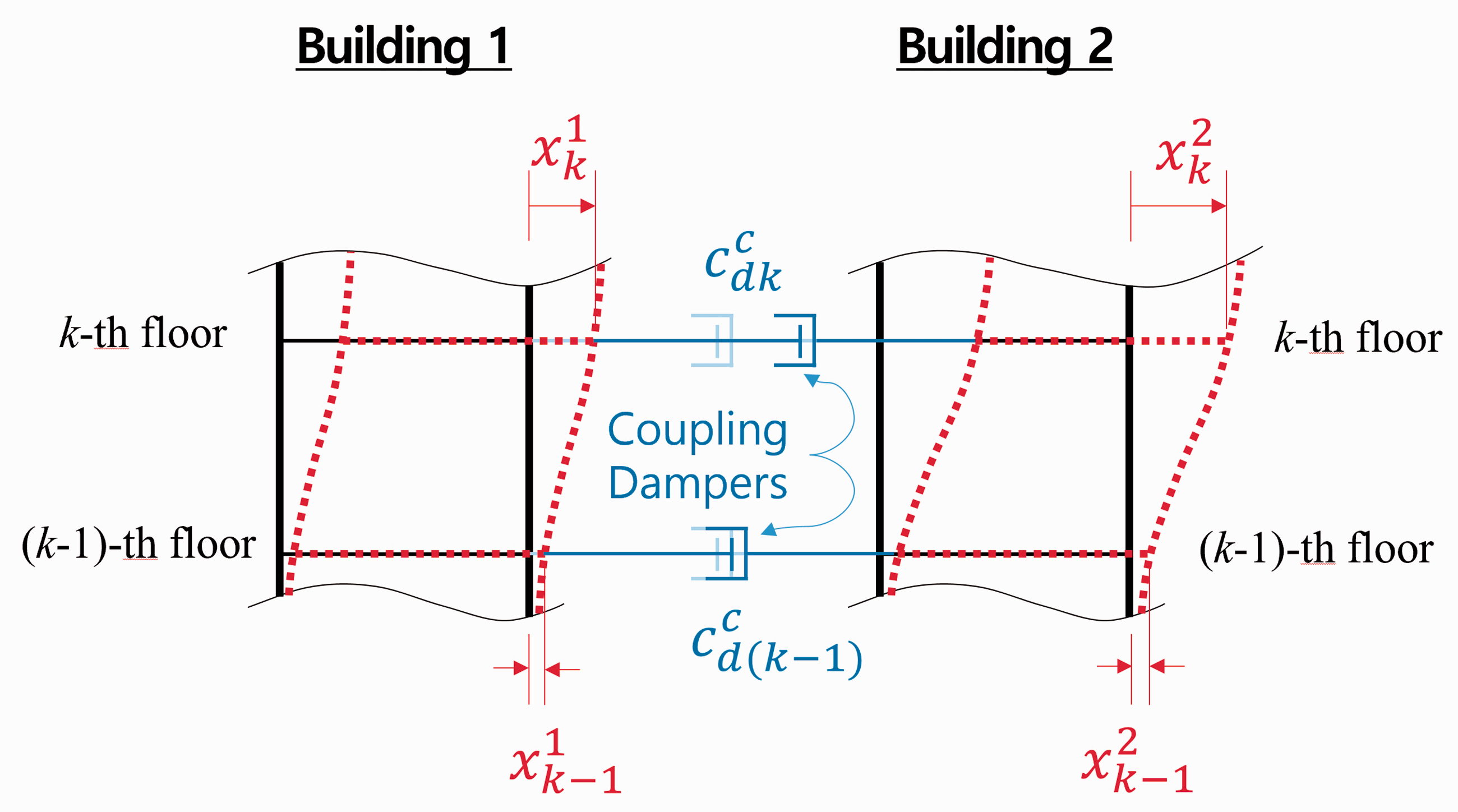
Inter-building damper connection approach.
In the vibrations of the two adjacent buildings, the relative response between two adjacent buildings (inter-building response) occurs more largely than the relative response between two successive floors of a single building (inter-story response) in most cases. Thus, the inter-building damper connection approach can utilize a more amplified response, i.e. the inter-building response, rather than the inter-story response. This explains the reason that the inter-building damper connection configuration can be more efficient than the inter-story damper connection configuration. However, as described in the introduction, the inter-building damper connection approach does not exhibit any control effect on twin buildings because of the behavioral symmetry of the twins.
Asymmetric base-isolated coupling control system
Figure 2 illustrates the conceptual drawing of the newly proposed asymmetric base-isolation coupling system for the vibration control of twin buildings. The proposed system consists of three subsystems such as one asymmetric base-isolation bearing, one inter-building coupling damper, and a set of inter-story diagonal bracing dampers distributed within the twin buildings. The base-isolation bearing induces asymmetry in the twin buildings and an inter-building coupling damper facilitates the control efficiency through the interaction of damping forces on both buildings. The use of the base-isolation bearing and the coupling damper would not provide sufficient damping capacity to dissipate the vibration energy of the twin structures. This insufficient damping capacity will be covered by using the inter-story diagonal bracing dampers distributed within the two buildings, as shown in Figure 2. Note that the inter-building damper connection is assumed to be fixed to the top floor only where the relative response across the damper can be amplified most significantly. This proposed system can be considered as a kind of hybrid system consisting of the base-isolation bearing, coupling damper, and diagonal bracing dampers. This hybrid system is referred to as the asymmetric base-isolation coupling system in this study. For simplicity, this system will now be designated as the ABiC system.
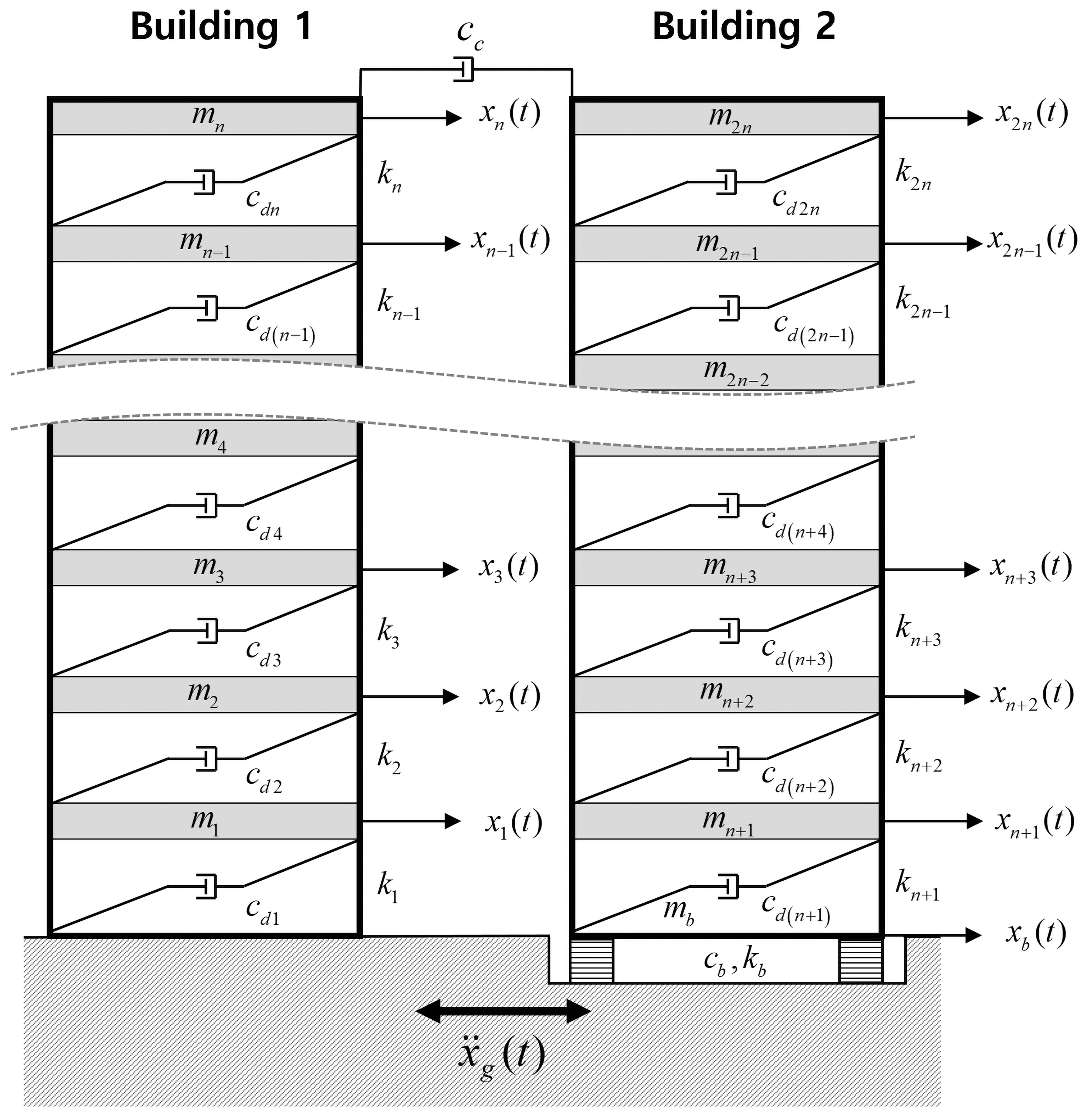
Asymmetrically isolated twin buildings coupled with a viscous damper.
When this structural system is subjected to ground motion, its equation of motion can be expressed as

As shown in Figure 2, the displacement vector




Design optimization of ABiC system
Formulation of optimization problem
In general, control performance can be improved as more control capacity is used, but it necessarily leads to an increase in cost. Therefore, when evaluating control performance, not only the structural response but also the total control capacity required should be compared at the same time. From this point of view, the design optimization problem of the proposed ABiC system involves simultaneous minimization of both performance-related and cost-related measures. Although various responses can be used as measures to be minimized, this study takes the following responses into account.
The first and second measures (λ1 and λ2) are, respectively, defined as the sum of the r.m.s. (root-mean-square) values of the story drifts of the two buildings such that


The third and fourth measures (λ3 and λ4) are respectively defined as the maximum r.m.s. value of the story drifts of the two buildings such that


The fifth and sixth measures (λ5 and λ6) are defined as the sum of the r.m.s. values of the damper forces for each building such that


The seventh measure (λ7) is defined as the r.m.s. displacement of the base floor of the isolated building 2 such that

The first and second measures are to minimize the overall performance on story drift responses, and the third and fourth measures are to prevent the story drift of any particular floor from being excessively amplified by sacrificing the responses of the other floors. These four measures are intended to ensure the control performance on reducing the excessive vibrations of the structures. The fifth and sixth measures are to minimize the total capacity of the dampers which is related to the cost. Therefore, these two measures are associated with cost savings. The last seventh measure is to limit the maximum displacement of the base-isolation bearing, which otherwise would be excessive.
A common difficulty in optimizing these multiple design objectives is the conflict of the multiple design objectives. None of the feasible solutions will allow simultaneous minimization of all objectives. Reducing one measure may adversely cause an increase in the other measures. Therefore, the optimization approach needs to consider the trade-off relations between the multiple design objectives. A multi-objective optimization approach can be one of the effective methods to handle such an objective-conflicting issue in a compromising manner. 19 However, as pointed out by Costa and Oliveira, 20 the multi-objective optimization approach would be practically implausible to apply when the number of the objectives is 3 or more. For more than three objectives, the 2 D visualization of the multiple objectives simply looks like a cloud of points, and thus it is not straightforward for the decision-maker to understand their trade-off relations through the visualization. Furthermore, high dimensionality of the objective space requires generating much more searching points for the representation of the Pareto optimal surface, which can cause significant difficulties in computational aspects. It is also well described in Park and Ok 15 that the evolutionary multi-objective optimization algorithms scale poorly when the problems have many objectives, and the decision-making task becomes harder as more objectives are involved.
In order to effectively address the simultaneous optimization of high dimensional objectives, this study employs a preference-based dimensionality reduction technique.15–17 This technique introduces a preference function to represent the degree of desirability for each objective criterion. 21 Each objective with a different design metric is normalized to the design preferences and these normalized preference values are then aggregated to a single metric to represent the multiple objectives. In this study, the peak responses of twin buildings, the total damping capacity, and the peak displacement of the base-isolation bearing have different physical quantities, but they are all normalized to the same scale, i.e. preference value, and aggregated into a single quantity. As a result, the multi-objective optimization problem is formulated into the single objective optimization problem to find the best compromising solution in view of the designer’s preferences on performance and cost. This can avoid computational difficulty and the design preference-based normalization eliminates the need for searching the relative weights between the objectives. It also has the benefit of integration of the optimization and decision-making processes based on design preferences.
In this study, the preference-to-objective relationship is constructed by classifying the design preferences into four categories of “very desirable,” “desirable,” “acceptable,” and “unacceptable” and mapping the corresponding objective function values to the boundary value of each section. This is illustrated in Figure 3. The four sections are denoted as (1) very desirable range (
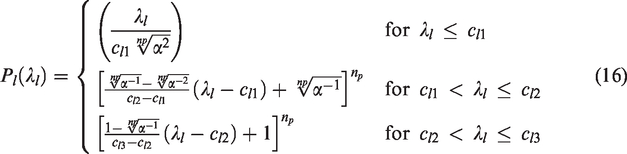
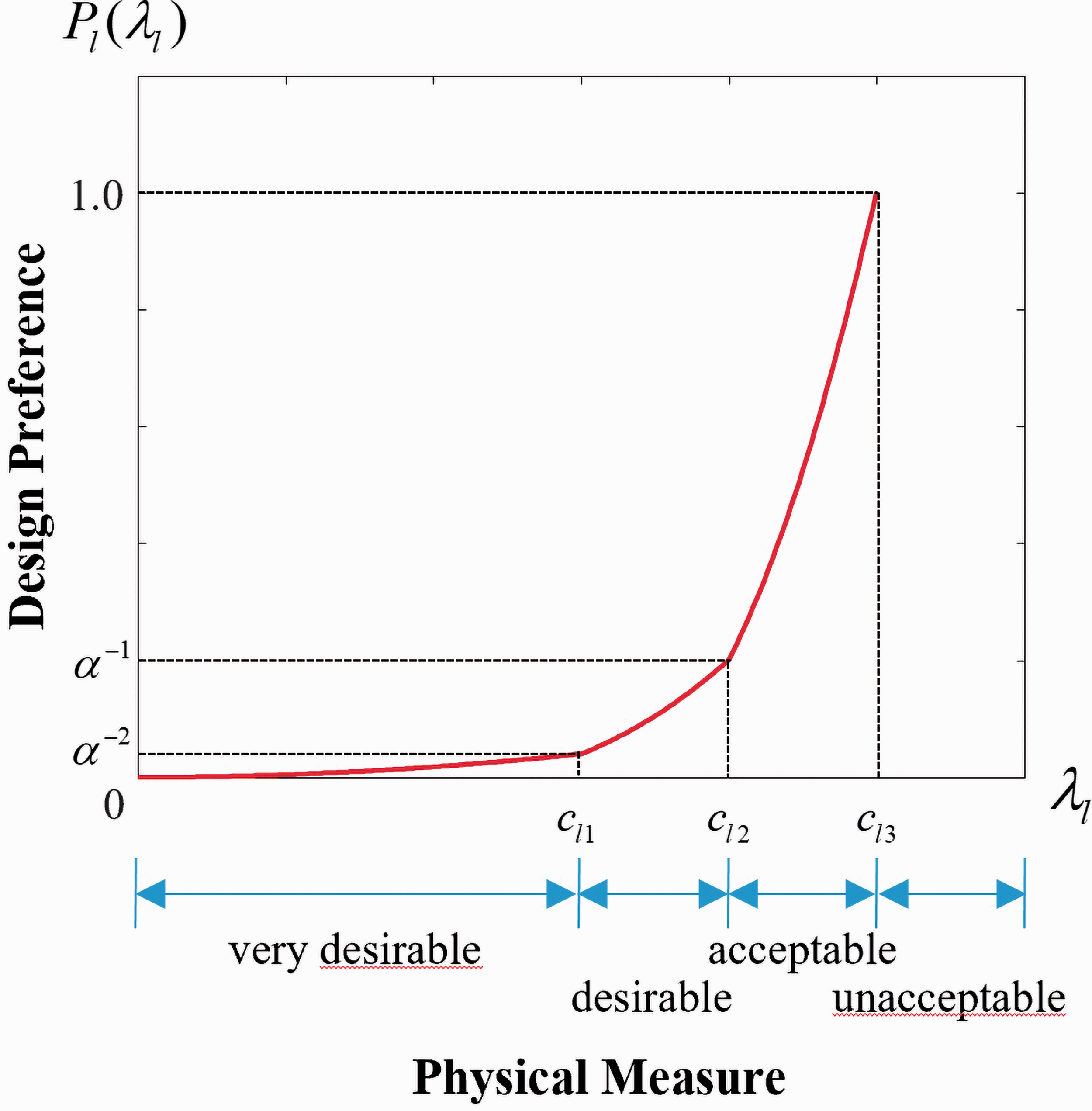
Preference function of j-th design measure.
Accordingly, the optimization problem can be formulated as follows

Hybrid optimization technique
In order to deal with the design optimization of the proposed ABiC system, this study incorporates the preference-aggregated objective function into the hybrid optimization technique. Here, the hybrid optimization technique is a kind of combinatorial optimization approach, and it thus employs combinations of multiple optimization algorithms to search the optimal solution. This is due to the fact that the best results found for many practical or academic optimization problems are obtained by hybrid algorithms. 22 Among various hybrid algorithms, 23 of interest in this study is the multiple offspring sampling (MOS) algorithm. 14 The MOS algorithm has been developed for general-purpose applications to the large-scale global optimization problems so that it can serve as a framework for combining any specific optimization algorithms that the user selects.
Now let us describe the concept of the MOS algorithm. The MOS algorithm is slightly modified from traditional evolutionary algorithms by adding the capability of using several different recombination techniques simultaneously. Therefore, the overall outline of the MOS algorithm is similar to those of traditional evolutionary algorithms, but it differs slightly in that it uses several recombination techniques at the same time. Figure 4 illustrates the algorithmic flowchart of the proposed MOS approach.
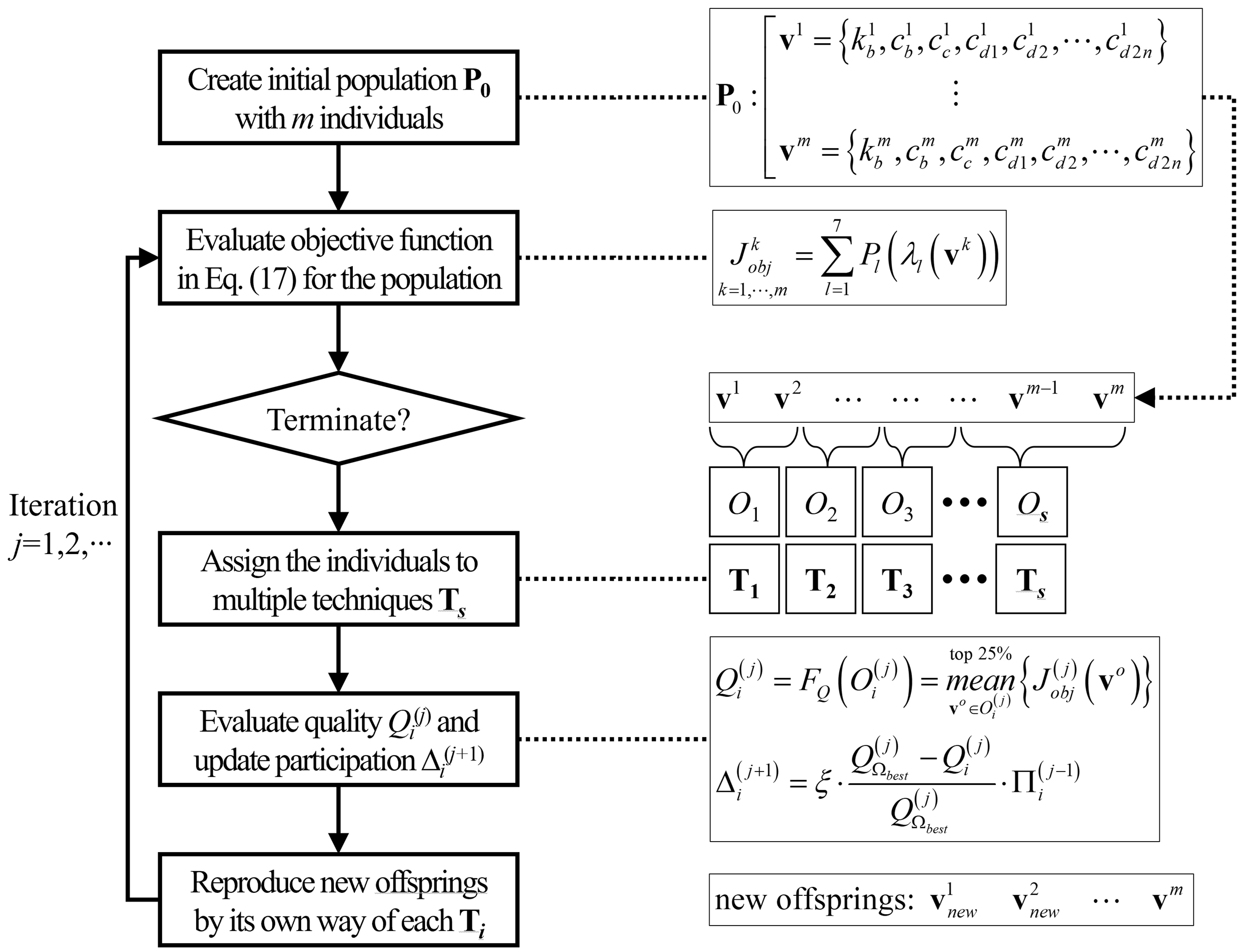
Algorithmic flowchart of the proposed MOS approach.
First, it starts with the creation of an initial population
In the recombination stage, the m individuals in the population are distributed and assigned to the s different techniques
At the initial stage, the individuals are uniformly distributed to each technique. Note that the group of the individuals distributed to the i-th technique is denoted as Oi. Each group goes with the corresponding technique during the current iteration. However, as the iteration proceeds, the s techniques compete with each other and the number of the individuals assigned to each technique will be varied according to the competition results. The competition of the techniques is made by the quality function Qi( j ) and the resultant output is produced as the adjusted participation number Δ i ( j +1). Note here that the subscript i={1,2, ···,s} is the index of the techniques and the superscript j corresponds to the iteration number of the optimization process. Thus, the adjusted participation number Δ i ( j +1) determines the increased (or decreased) number of the individuals assigned to (or removed from) the technique Ti during the next (j + 1) iteration.
The quality function is defined as the average value of the preference-aggregated objective functions for the top 25% of the individuals such that

These quality function values are then used in the following participation function to adjust the participation number of the individuals of each technique such that


Thereafter, each technique reproduces its own offsprings with the newly adjusted number of the offsprings. With these adjusted participations of individuals, all those recombination techniques compete with each other iteratively in order to search for better solutions. Note that the total number of the new offsprings gathered from the s techniques will remain equal to m. However, if any efficient technique works better than others, then the participation ratio will be increased and more individuals will be assigned to that technique. Therefore, this dynamic adjustment of the participation of the multiple recombination techniques is expected to provide significant improvement in seeking the global optimal solutions more efficiently. In addition, the proposed algorithm provides a general framework of combining any specific optimization algorithms so that it will be able to realize the desired features of the algorithms effectively, e.g. rapid convergence to an optimal path with reduced computational effort. Although the proposed hybrid optimization technique was developed for the vibration control problem of twin structures, it can be extended to a general design problem of the structural control system with many design objectives to be minimized and many design variables to be explored.
Illustrative example
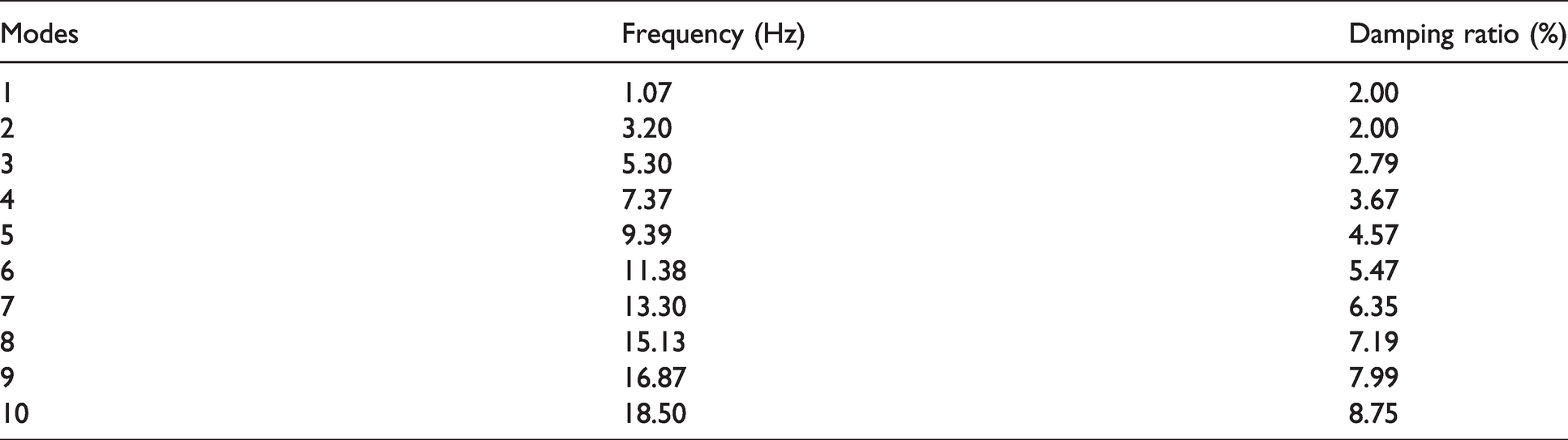
For an illustration purpose, adjacent 20-story twin buildings are considered. The structural properties of the 20-story building are given in Table 1. The base floor mass will apply to the isolated building only, i.e. building 2 in Figure 2. The damping ratios are assumed to be 2% for both the first and second modes. By using them for the Rayleigh damping model (
Structural properties of two 20-story buildings.

Top 10 modal properties of a 20-story building.
Now, the proposed ABiC system has been applied to these 20-story twin buildings, and the hybrid optimization algorithm integrated with preference-based dimensionality reduction technique has been applied to optimally design the proposed ABiC system. In the optimal design of the proposed ABiC system, the design load for the ground motions is represented by Kanai-Tajimi filter model,
24
and its power spectral density function is given by the following

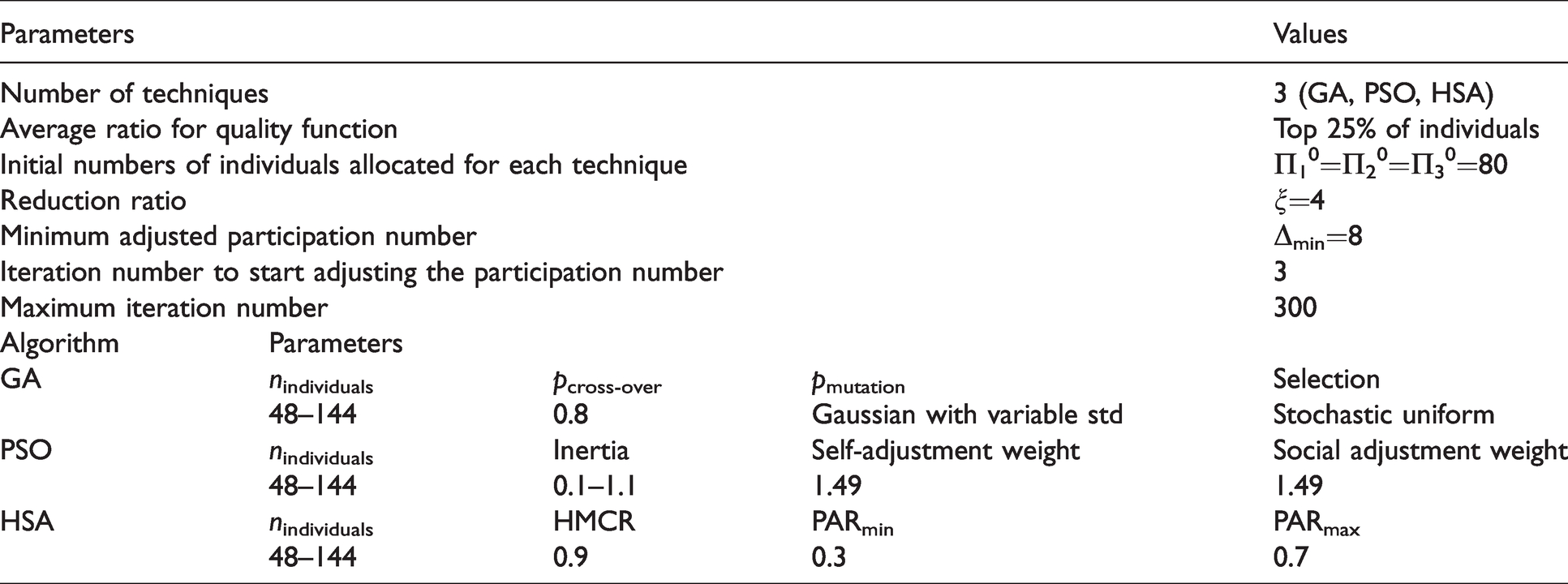
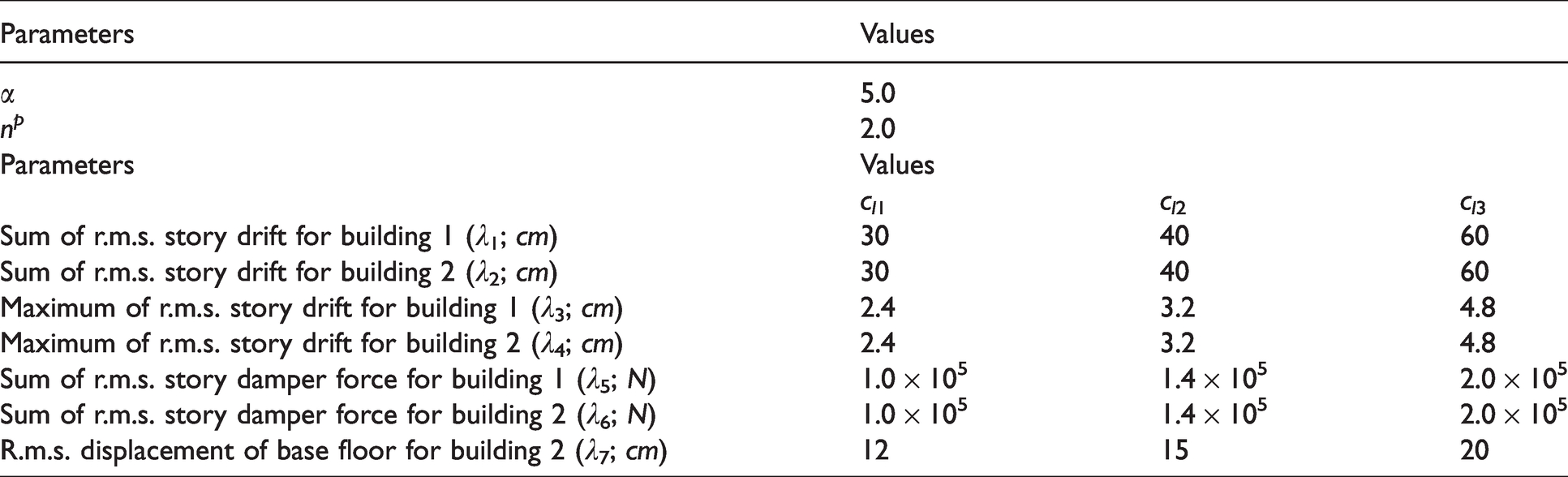
The parameters of hybrid optimization algorithms and the preference functions are summarized in Tables 3 and 4. As already described in equation (17), the proposed ABiC system is represented by a vector of the design variables such as
Parameters of hybrid optimization algorithm.
Parameters of preference functions.
Searching ranges of design variables.

Optimization results
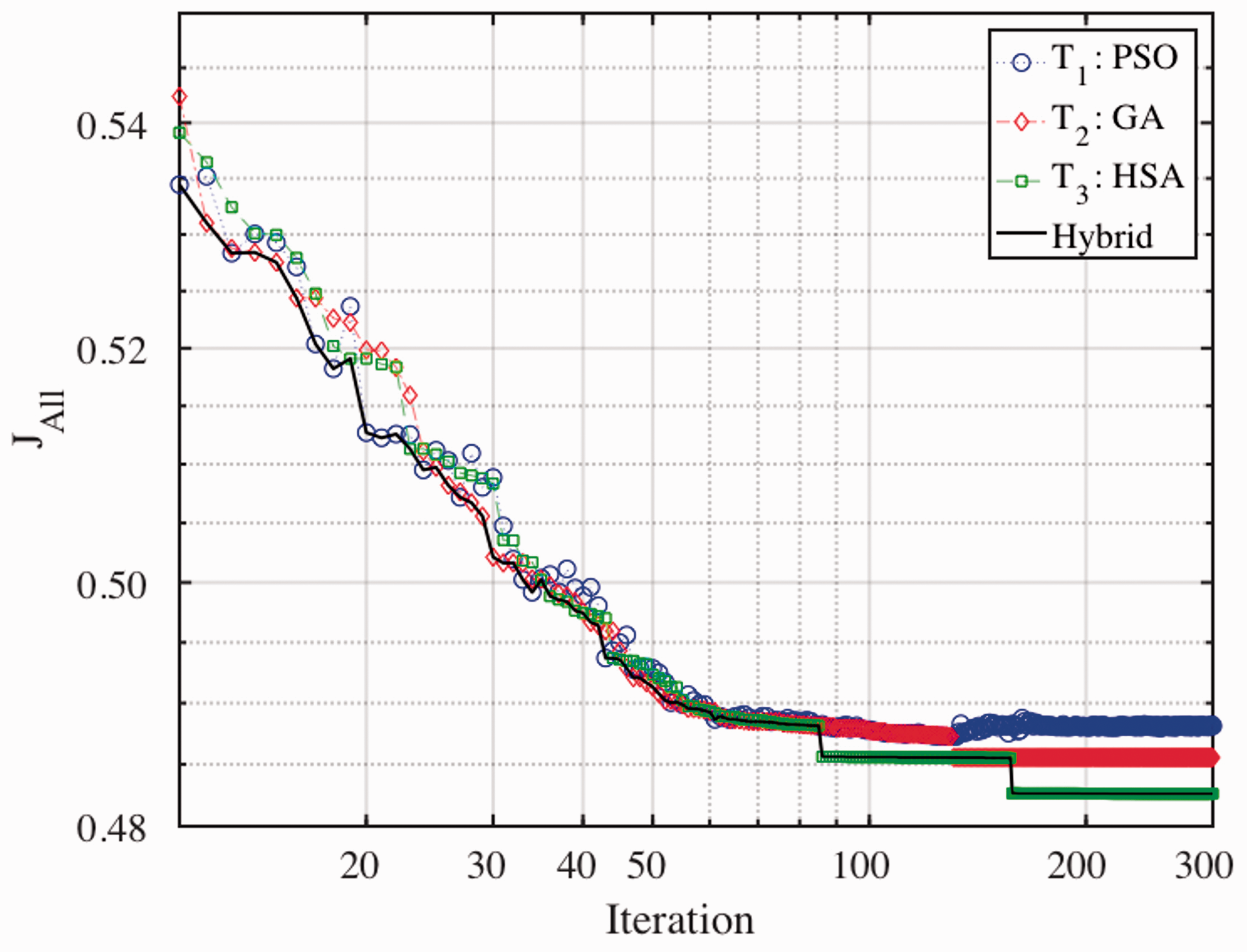
The proposed hybrid optimization approach has been performed for the given parameters and the convergence results are shown in Figure 5. The horizontal axis corresponds to the iteration number of the optimization process, and the vertical axis represents the objective function value in equation (17). The three plots denote the convergence histories of the best solutions searched by the three algorithms such as PSO, GA, and HSA. It can be shown that GA and HSA show similar results in the convergence history of optimal solutions, whereas PSO produces the better solution over GA and HSA in the early stage of the convergence history. After roughly 30 iterative optimizations, the three algorithms produce very similar convergence histories. Thereafter, the three algorithms will compete with each other to find better solutions, and the MOS algorithm selects the best solution among the optimal solutions found by each algorithm, which can be observed by the last plot of Figure 5. For clarity, the enlarged view of the competitive convergence history was provided in Figure 6, where the black solid line corresponds to the best solution chosen by the MOS algorithm. In this regard, the algorithm that finds the best solution in each optimization step may be changed, but the proposed MOS algorithm always obtains the best solution through competition between the three algorithms. In the early stage of the optimization process, PSO showed a good searching performance as shown in Figure 5, but HSA achieved the best searching performance at the end of the searching process as shown in Figure 6.
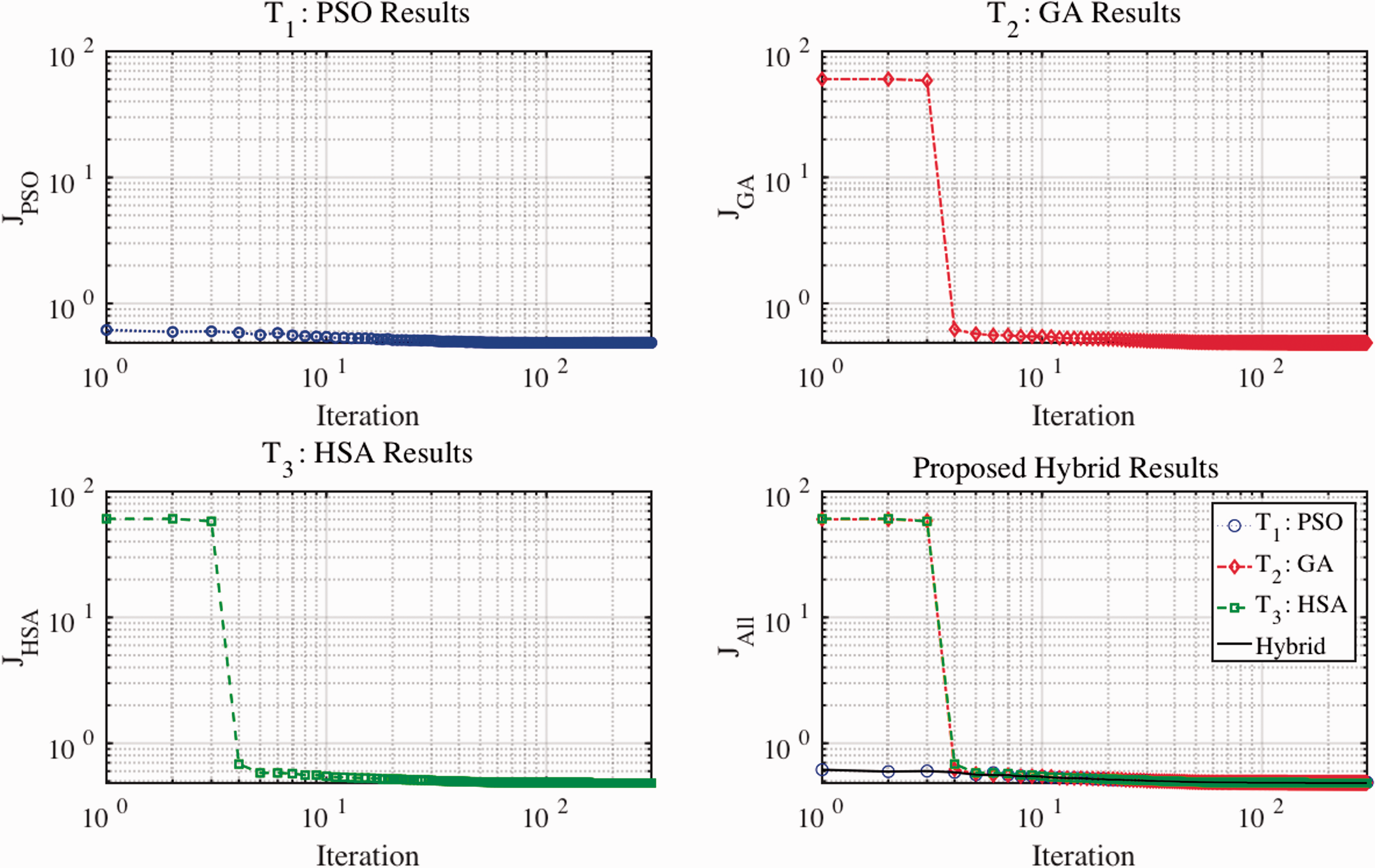
Convergence histories of optimal solutions by hybrid optimization algorithm.
Enlarged view of competitive convergence history.
Figure 7 is additionally given to illustrate the change in population redistribution according to the competition results of the three algorithms. Initial populations start with the same number of individuals, i.e. 80, for the three algorithms but their populations significantly change after the third iteration which corresponds to the initial number to start adjusting the participation number. On the other hand, it can be seen that the number of population adjustment of each algorithm decreases or increases only up to 8 since the minimum adjusted participation number is set to 8, which avoids the premature convergence of one particularly algorithm that luckily picks up a good initial solution. Another observation is that the PSO population does not drop below 48 corresponding to the minimum population assigned to each algorithm, which guarantees that all the techniques can participate during all the iterative searching process.
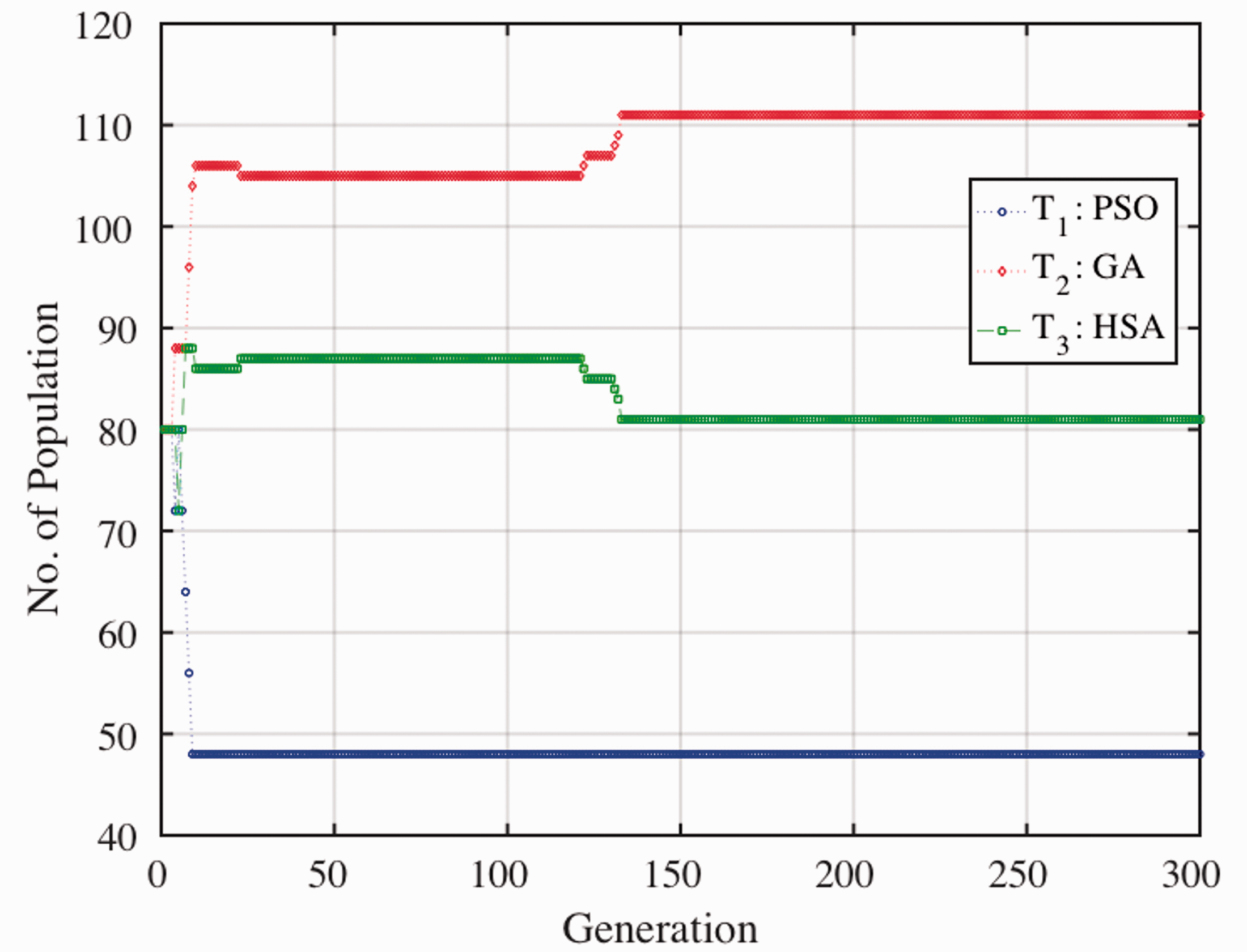
Variations of population numbers redistributed to three algorithms.
The proposed hybrid optimization approach integrates the preference-based dimension reduction technique into the existing MOS algorithm in order to balance the multiple design preferences. In order to demonstrate how well the proposed hybrid optimization approach works for balancing the design preferences, two initial individuals are selected among the initial population that has been randomly generated by the proposed hybrid optimization approach. Then, their initial design preferences are compared with those of the finally obtained optimal solution. Figure 8 illustrates the preference evaluation results of the two initial solutions and the final optimal solution. The horizontal axis corresponds to design preferences and the vertical axis represents the seven measures denoted as
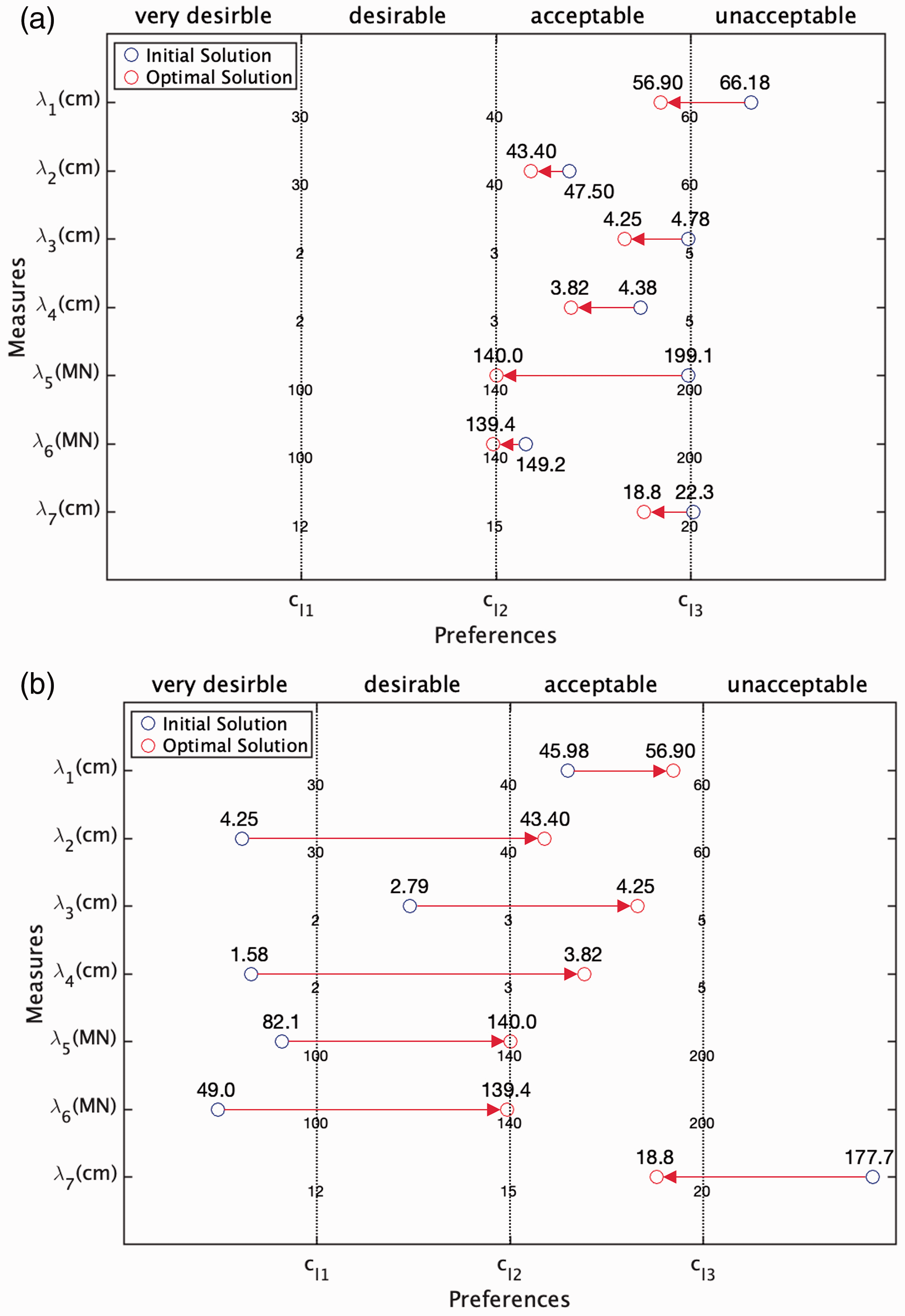
Optimization results of balancing preferences: (a) Case 1: initial solution 1, and (b) Case 2: initial solution 2.
As shown in Figure 8(a), initial solution 1 shows “acceptable preference” for
On the other hand, as shown in Figure 8(b), initial solution 2 exhibits very excellent performances on
The optimization results such as the distribution of the damping coefficients and stiffness values of the ABiC system are depicted in Figure 9. The vertical axis corresponds to the floors of the two buildings, and the horizontal axis is split into two parts: the left part represents the damping capacity of the ABiC system for the building 1 and the right part represents the damping capacity of the ABiC system for the building 2. Therefore, the blue (
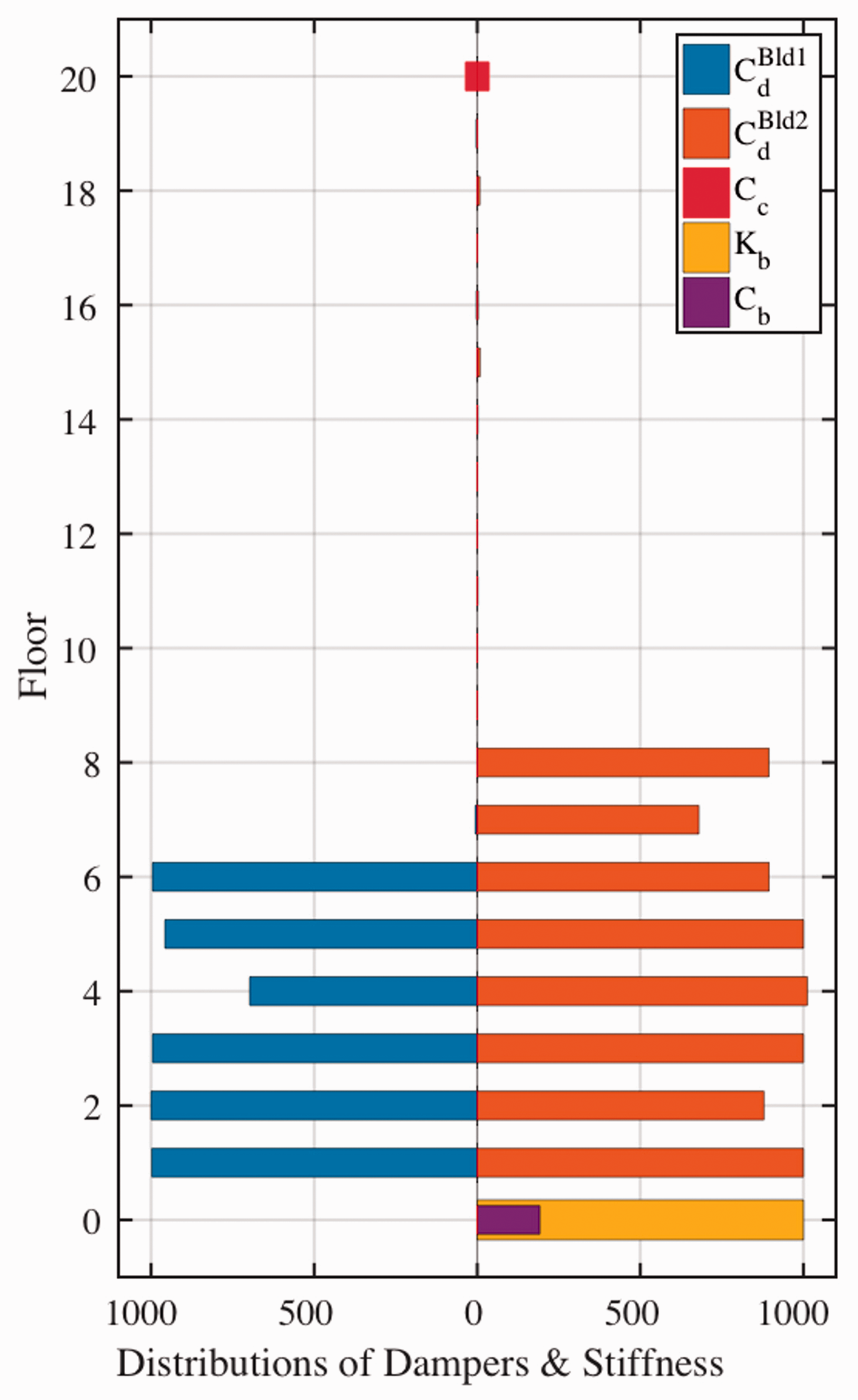
Distributions of dampers (105×kg·s/m) and stiffness (kN/m).
Comparative performance assessment
For comparison purpose, the previous inter-building different-story damper connection system proposed by Patel and Jangid 12 has been considered, where the dampers are installed to connect the two buildings and both ends of each damper are connected to different floors of each building. Although Patel and Jangid 12 proposed three configurations, we only consider one configuration with uniform damper distribution for simplicity, as shown in Figure 10. This comparative system is designated as the inter-building uniform damper connection system, in short, iUDC system.
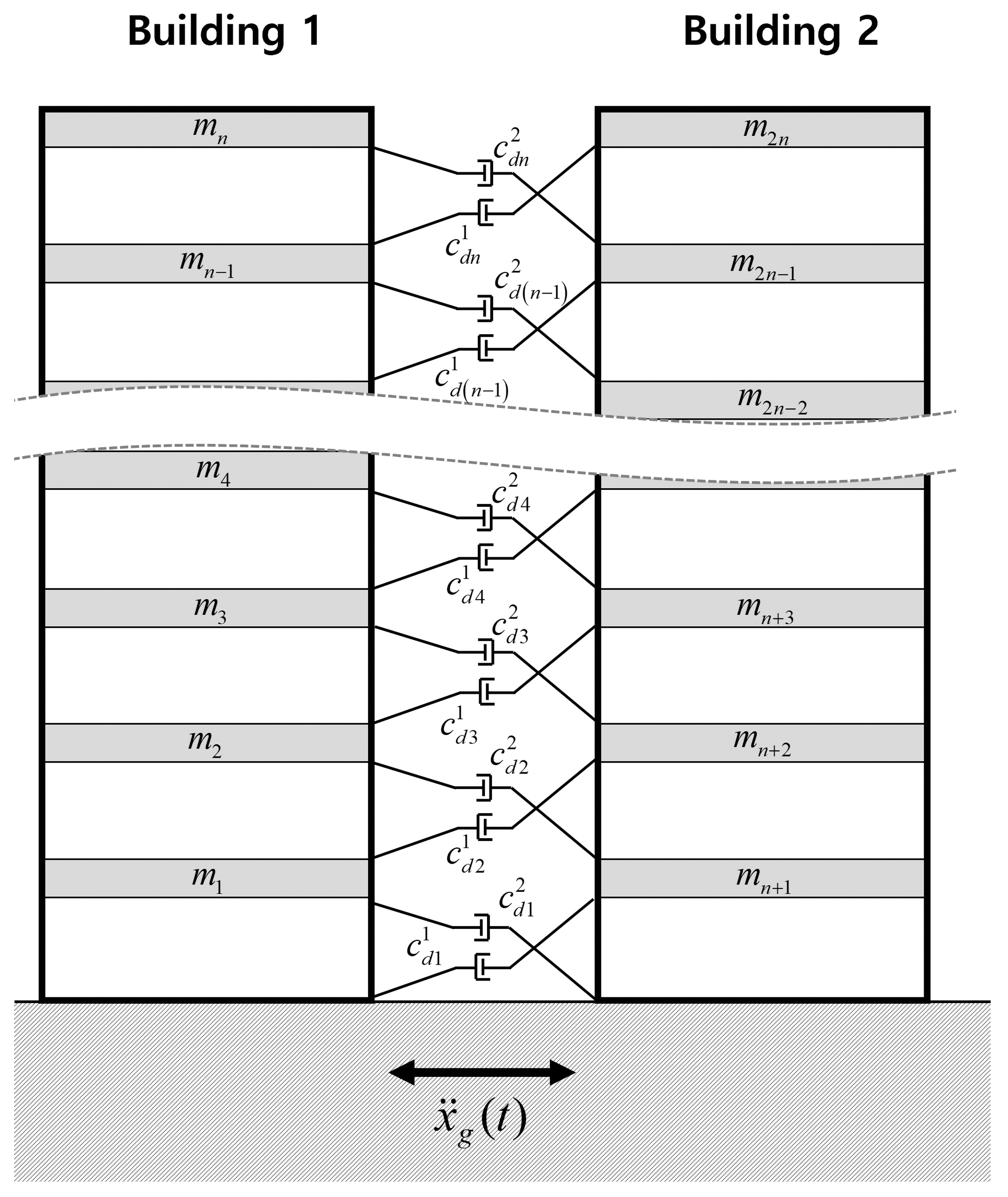
Damper connection configuration of iUDC system.
This iUDC system has been designed to have the same damping coefficient in all dampers as proposed by Patel and Jangid
12
. Although Patel and Jangid
12
proposed the different damping coefficients for another configuration, we simply assume the uniform distribution of all dampers. Under this assumption, the design of the iUDC system reduces to the determination of the damping coefficient, i.e.
In order to investigate the seismic performances of the twin buildings interconnected with ABiC or iUDC systems, the r.m.s. values of the story drifts have been evaluated and they are depicted along with the floors in Figure 11. The responses of the original buildings without any damping devices, denoted as UNC, are also presented for comparison. As you can see, the iUDC system improves the seismic performances on the story drifts of the two buildings over the UNC system, but the proposed ABiC system further improves the seismic performances over the iUDC system.
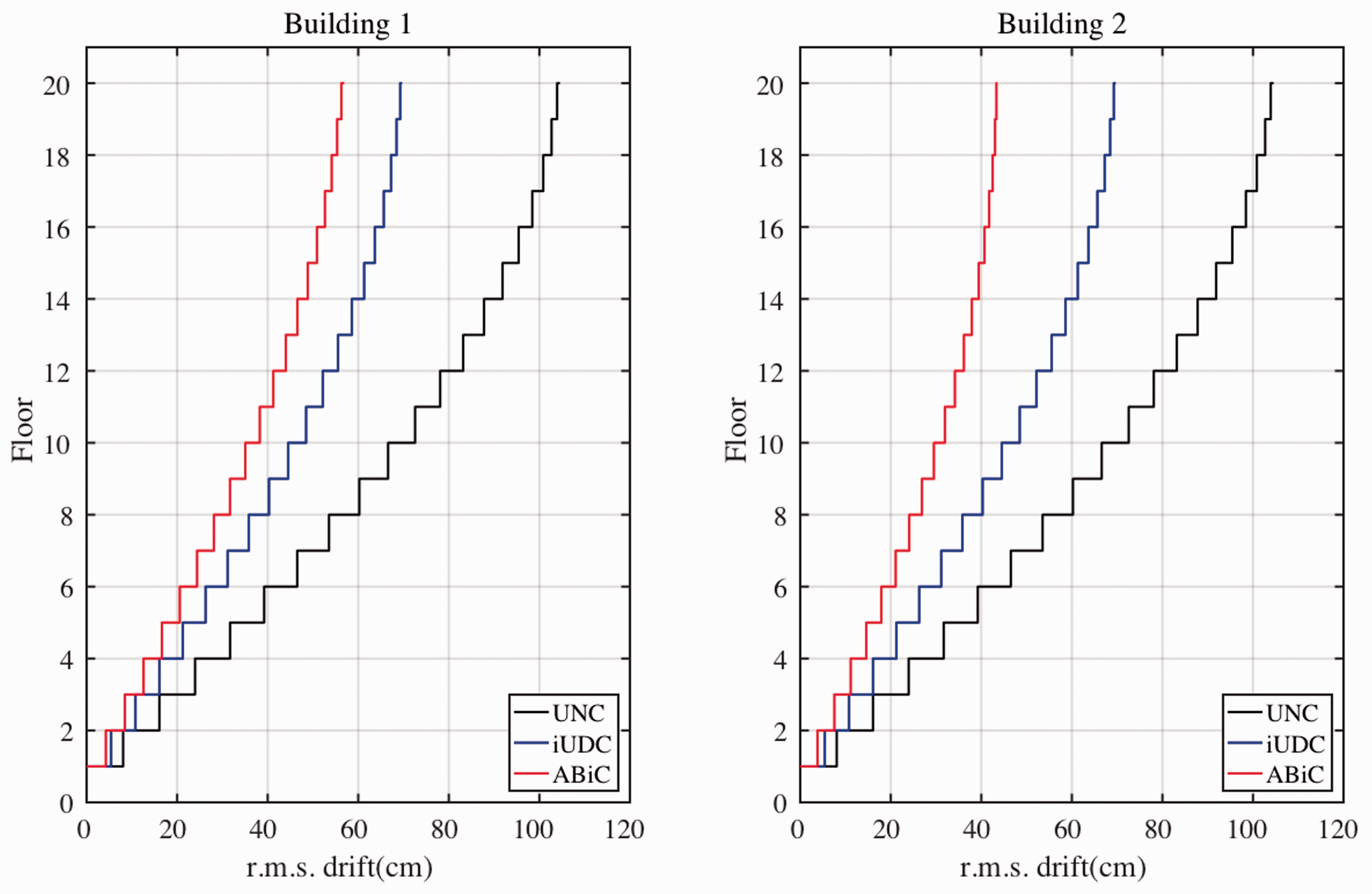
Comparison of story drifts of twin buildings between UNC, iUDC, and ABiC.
Although the iUDC system was not designed in terms of design preference but was simply designed according to the existing method by Patel and Jangid,
12
its design preferences are computed for the purpose of performance comparison, and the comparison results with the proposed ABiC system and the UNC system are displayed in Figure 12. Since the UNC system does not have dampers, its measures are only computed for
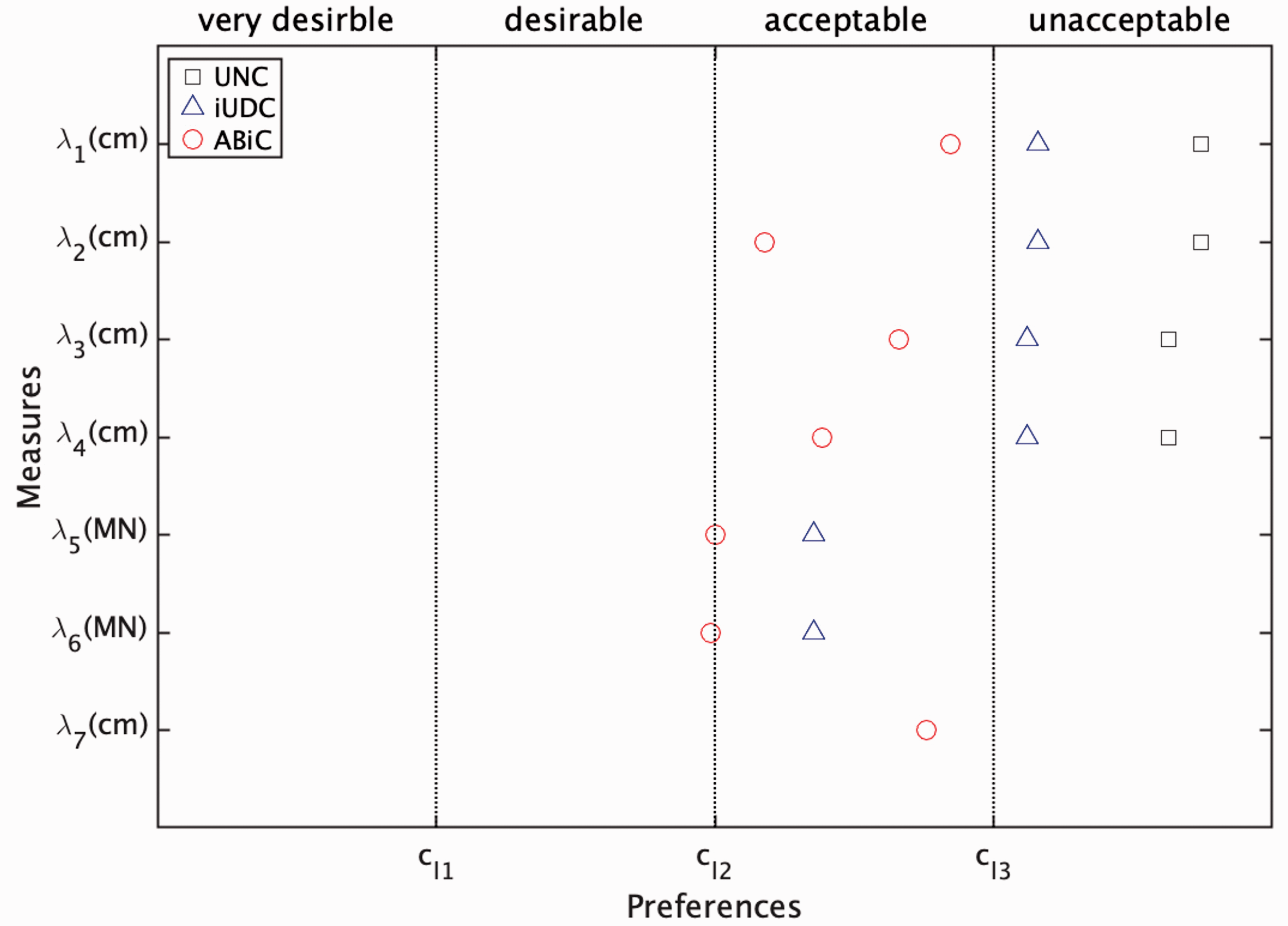
Comparison of story drifts of twin buildings between UNC, iUDC, and ABiC.
In order to demonstrate the practical applications, historical earthquake records such as El Centro, Mexico City and Northridge earthquakes are used as the input ground motion, and the seismic response analyses have been further performed in the time domain by solving equation (1). The time history curves of the top floor displacements and the base shear forces are presented in Figure 13. Similar to the previous r.m.s. response results, it can be confirmed from Figure 13 that the iUDC system shows improved seismic performance than the UNC system, and the proposed ABiC system further improves seismic performance than the iUDC system. These results clearly verify that the proposed ABiC system is able to exhibit efficient seismic performance by perturbing the frequency characteristics of the twin structures through the arrangement of the asymmetric base isolation system.
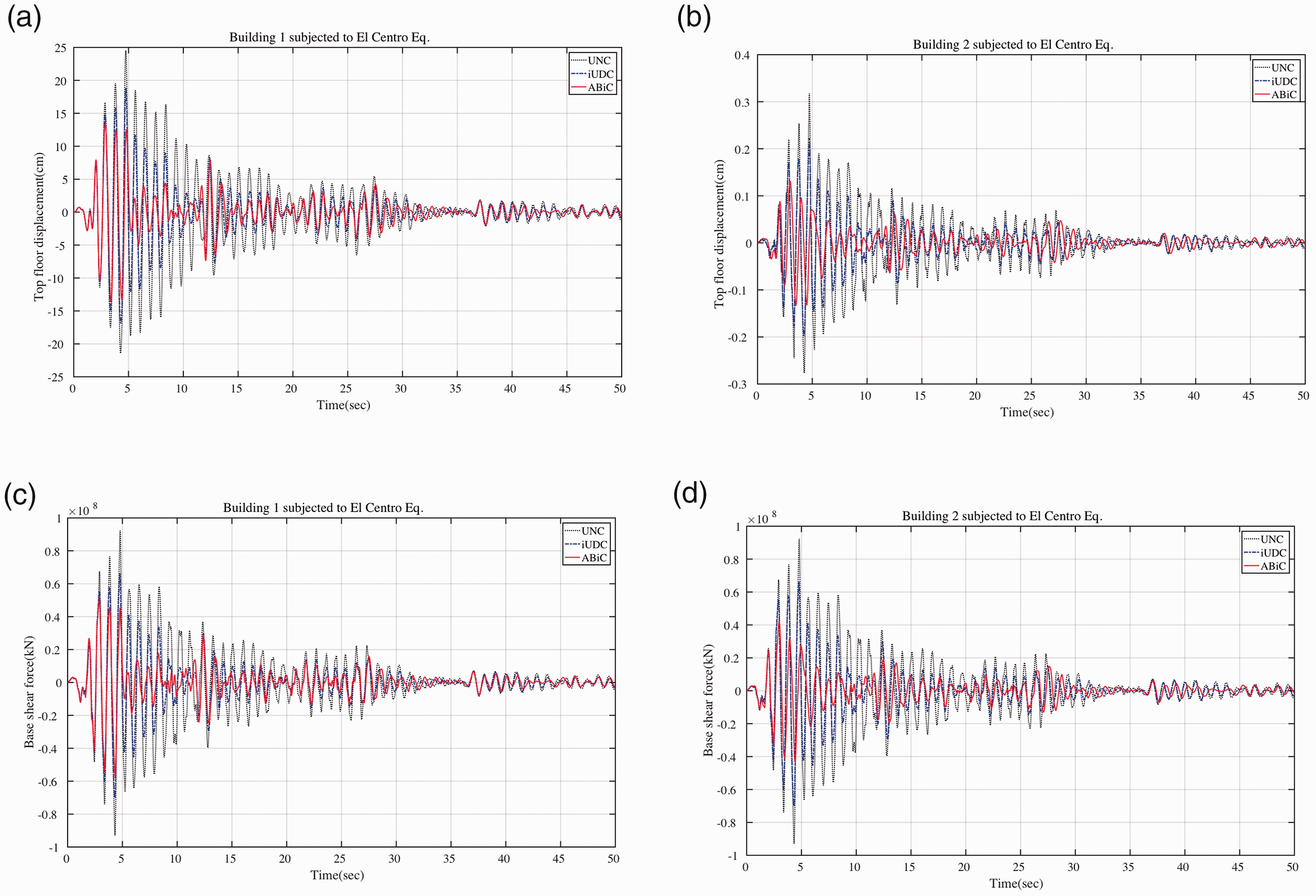
Comparative responses between UNC, iUDC, and ABiC under El Centro Eq.: (a) Top floor displacements of building 1, (b) Top floor displacements of building 2, (c) Base shear forces of building 1, and (d) Base shear forces of building 2.
Performance contribution of subsystems
The proposed ABiC system consists of three subsystems such as the inter-story diagonal damper system, the inter-building coupling system, and the asymmetric base isolation system. Here, we investigate the contribution of the three subsystems to the overall seismic performance. For this purpose, the control capacity of each subsystem has been varied by multiplying the coefficient
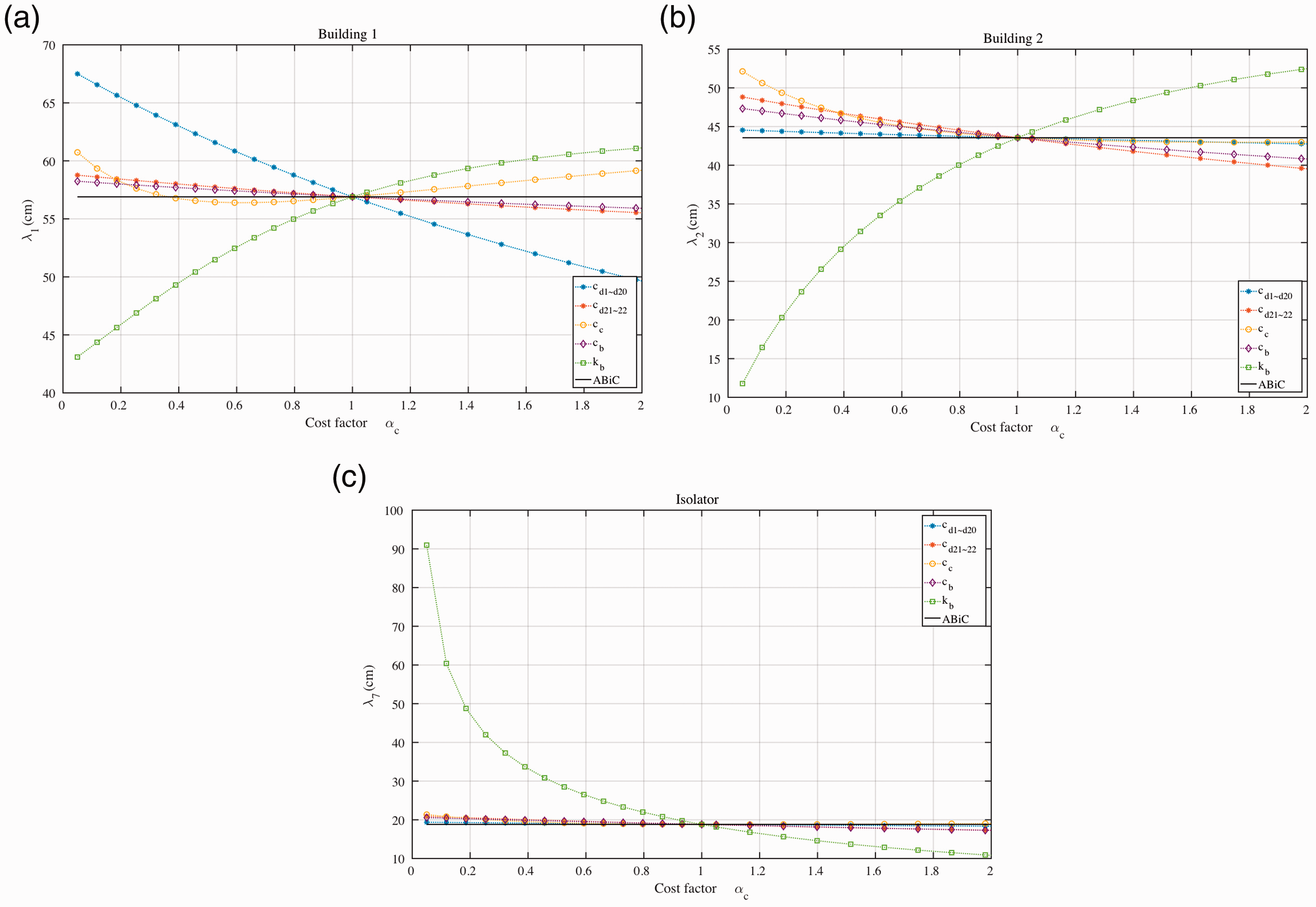
Comparative story drifts between UNC, iUDC, and ABiC under El Centro Eq.: (a) r.m.s. story drifts of building 1(λ1), (b) r.m.s. story drifts of building 2(λ2), and (c) r.m.s. displacements of base floor of building 2(λ7).
As shown in Figure 14(a), the increase in the damping capacities of the inter-story bracing dampers inside the building 1 (
Figure 14(b) shows the story drift of the building 2 (
As shown in Figure 14(c), the displacement of the base floor is not much affected by the damping capacities of the bracing dampers and the isolator damper. Increasing the stiffness of the base isolator (
Concluding remarks
This study proposes an asymmetric base-isolation coupling system to deal with the vibration control problem of the twin buildings. Since the proposed system entails high-dimensional mutually-conflicting objectives, a hybrid optimization technique incorporated with a preference-based dimensionality reduction technique was used to optimally design the twin buildings equipped with the asymmetric base-isolation coupling system. The purpose of the proposed optimization approach is to guarantee the compromise optimal solution of well-balancing the mutually conflicting design objectives.
In order to demonstrate the proposed approach, the adjacent 20-story twin buildings subjected to earthquake excitations were adopted as target buildings, and the existing different-story connection system with uniform distribution of dampers was considered as the comparison system. The comparative results of the seismic performances between two systems clearly show that the proposed ABiC system can achieve the well-balancing compromising performances between multiple design objectives and also exhibit improved performances over the existing iUDC system. Thus, it can be concluded that the proposed ABiC system can be a very effective system for controlling the vibrations of the twin buildings.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education [grant number 2017R1D1A1B04031418].