
Abstract
The double-helical gear system was widely used in ship transmission. In order to study the influence of backlash on the nonlinear frequency response characteristics of marine double-helical gear system, according to the structural characteristics of double-helical gear transmission, considering the time-varying meshing stiffness, backlash, damping, comprehensive transmission error, external load excitation, and other factors, a three-dimensional bending-torsional-axial-pendular coupling nonlinear dynamic modeling and dynamic differential equation of 24-DOF double-helical gear transmission system were established. The Runge–Kutta numerical method was used to analyze the influence of backlash, time-varying meshing stiffness, damping, error and external load excitation on the amplitude frequency characteristics. The results show that the backlash can cause the runout of the double-helical gear system, and the system has first harmonic and second harmonic response. With the increase of backlash, the amplitude of the system increases and the jumping phenomenon remains unchanged. The amplitude frequency response of the system is stimulated by time-varying meshing stiffness and comprehensive transmission error, and restrained by damping and external load excitation. The vibration displacement amplitude of the system increases with the increase of vibration displacement and has little effect on the state change of the system. The vibration test of double-helical gear is carried out. The frequency response components obtained by numerical simulation are basically consistent with the experimental results, which proves the correctness of the theoretical calculation. It provides a technical basis for the study of vibration and noise reduction performance of double-helical gear.
Introduction
Double-helical gear has the advantages of compact structure, large bearing capacity, stable operation, and can overcome large axial force. It is widely used in marine transmission device. The noise produced by gear vibration will not only affect the comfort of the cabin, but also threaten the safety of the ship. 1
Many scholars at home and abroad have done a lot of research on gear vibration. Kahraman2–4 used numerical method and analytical method to analyze the nonlinear dynamic frequency response characteristics of spur gear pair under internal excitation, and found that there are a lot of nonlinear phenomena such as jumping phenomenon and multi value solution in gear vibration response. Li 5 established the pure torsion dynamic model of spur gear pair, and studied the influence of system parameters on the nonlinear dynamic characteristics of spur gear system. Chen 6 established a gear-rotor-bearing coupling model and studied the circumferential and axial dynamic responses of double-helical gears with different helix angles. Liu 7 established the double-helical gear model based on the hybrid user-defined element method, and analyzed the vibration response of the system, which was in good agreement with the test. Yin 8 found that considering the time-varying oil film stiffness and time-varying damping of journal bearing can more accurately predict the dynamic characteristics of gear. Zhao 9 analyzed the influence of backlash, eccentricity, and tooth surface friction on the nonlinear vibration of high-speed gearbox system of wind turbine. Deng 10 studied the influence of different planet carriers and different support modes on the meshing performance of the double-helical planetary transmission system. Zhang 11 established the dynamic model of double-helical gear split torque transmission system based on the finite element method, and simulated the response of the system in time domain and frequency domain. Zhang 12 considered the phase relationship among multiple meshing of double-helical planetary gear transmission system, and studied the influence of meshing phase on the load sharing of double-helical planetary gear by integrating the support stiffness and error excitation of each component. Yuan 13 studied the influence of cumulative pitch error on the dynamic characteristics of double-helical gear system. Wang14–15 studied the vibration characteristics of double-helical gear transmission system under different loads and different coincidence degrees. Mo 16 analyzed the nonlinear dynamic characteristics of double frequency of double-helical gear closed differential planetary transmission system under no-load or light load conditions. Zhou 17 established the bending-torsion-shaft model of double-helical gear, and analyzed the influence of the basic parameters such as the addendum height coefficient, the top clearance coefficient, and the tooth width on the vibration and noise of the reducer. Li 18 studied the influence of the fractal backlash on the dynamic characteristics of the gear bearing system. Zhi 19 proposed a gear nonlinear model of multi-degree of freedom considering the characteristics of gear tooth. Fractal theory was used to calculate the nonlinear backlash from the tribological aspect. Lian 20 established a multiple degrees of freedom nonlinear dynamic model of a gear pair with time-varying mesh stiffness, mesh damping, backlash, dynamic transmission errors, and radial clearance of ball bearing by using mass centralized method. The effects of main parameters such as exciting frequency, radial clearance of ball bearing, and meshing stiffness ratio on chaos and bifurcation of the system were studied. Yi 21 established a single degree of freedom spur gear pair model including time-varying mesh stiffness and static transmission error. The nonlinear frequency response characteristics of a spur gear system were studied. Ling 22 established a torsional nonlinear dynamic model of multi-stage planetary gear considering time-varying meshing stiffness, comprehensive gear error, and piece-wise backlash nonlinearities, and studied the effects of excitation frequency, backlash and damping on bifurcation characteristics. Siar 23 proposed a nonlinear dynamic model of parallel shaft gear and intersecting shaft gear and solved the nonlinear algebraic Equations by multi-order harmonic balance method combined with Continuous Fourier transform. Ramadani24–26 presents a new approach aiming to reduce gear vibration and weight by modifying its body structure. A new precise closed loop test rig was designed and produced to measure experimentally vibrations caused by rotating and lubricated gear pairs. Spitas 27 analyzed the dynamic contact of gears and deduces the flexibility, contact geometry, backlash and torsional and transverse displacement and deflection in general three-dimensional multi degree of freedom systems. Sakaridis 28 studied the influence of single tooth inertia on the dynamics of spur gears, and established a lumped element model, which decoupled the inertia characteristics of teeth and gears, and considered the meshing stiffness and backlash related to meshing position and load. Gkimisis 29 proposed an accurate repositioning method for contact reversal of involute teeth, established a general approximate function of meshing stiffness of gear pair including load dependence, and successfully fitted it to the analysis data.
To sum up, the research on the nonlinear characteristics of double-helical gear transmission system at home and abroad mostly focuses on the establishment of bending torsion coupling model and the analysis of influence mechanism. The research on the establishment of nonlinear dynamic model considering BTAP coupling of double-helical gear system is insufficient, and the influence of time-varying meshing stiffness or backlash is often ignored. At the same time, there are few reports about the nonlinear frequency response of double-helical gear.
On this basis, the BTAP coupling dynamic model of double-helical gear pair system is established, which is more suitable for the actual working conditions, and the amplitude frequency response of double-helical gear pair system is solved. The effects of backlash, time-varying meshing stiffness, damping, comprehensive transmission error and external load excitation on frequency response characteristics are analyzed. Through the comparison with the vibration test data of double-helical gear, it provides a reference for the vibration reduction, noise reduction and structure optimization of double-helical gear.
BTAP coupling nonlinear dynamic modeling of double-helical gear pair considering backlash
Due to the deformation of elastic support and axial dynamic meshing force, there are not only torsional vibration, bending vibration and axial vibration, but also pendular vibration in double-helical gear transmission system. The BTAP coupling nonlinear dynamic modeling of double-helical gear pair is shown in in Figure 1. Bending-torsional-axial-pendular coupling nonlinear dynamic model of double-helical gear.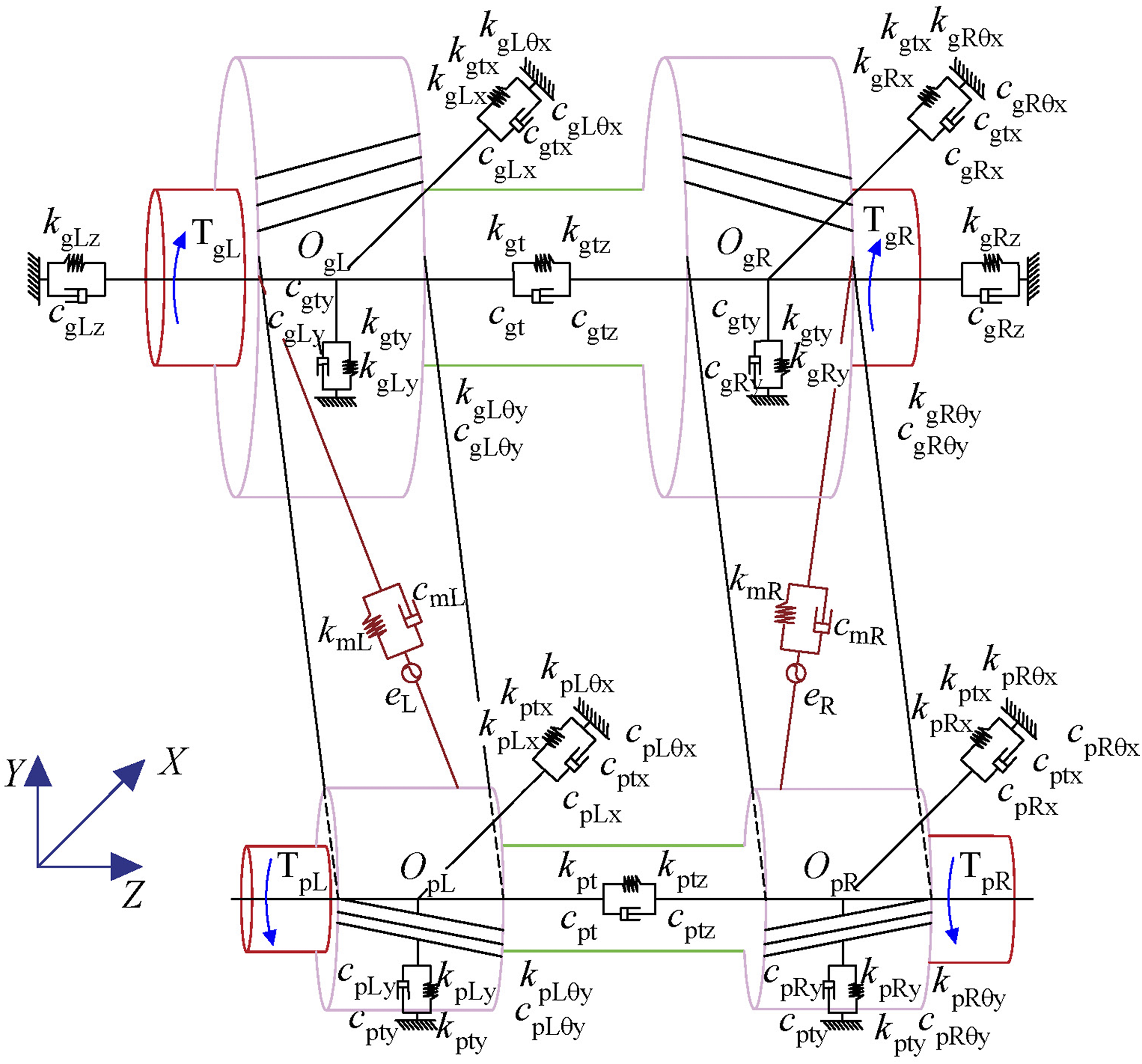
Here, TpL, TpR, TgL, and TgR represent the input torque and output torque acting on the driving helical gear and the driven helical gear, respectively. kmj and cmj represent the meshing stiffness and damping of the left and right helical gears. e j represents the static transmission error of the left and right helical gears. The intermediate shaft section of the double-helical gear is regarded as a torsion bar unit with two nodes. kit and cit represent the torsional stiffness and damping of the intermediate shaft section of the double-helical gear. k ijx , k ijy , k ijz , c ijx , c ijy , and c ijz represent the support stiffness and support damping along the coordinate axis x, y, and z, respectively. k ijθx , k ijθy , c ijθx , and c ijθy represent the torsional support stiffness and torsional support damping along the coordinate axis x and y, respectively. Subscript i = p, g for driving and driven gears, subscript j= L, R for left and right equivalent gears.
Figure 2 shows the axial projection of double-helical gear pair.
The positive direction of rotation angular displacement of driving and driven wheels is shown in the Figure 2. The gear pressure angle is α. The included angle between center distance OpOg and x axis is φ. The included angle between meshing line MN and y axis is ψ. Axial projection of double-helical gear pair.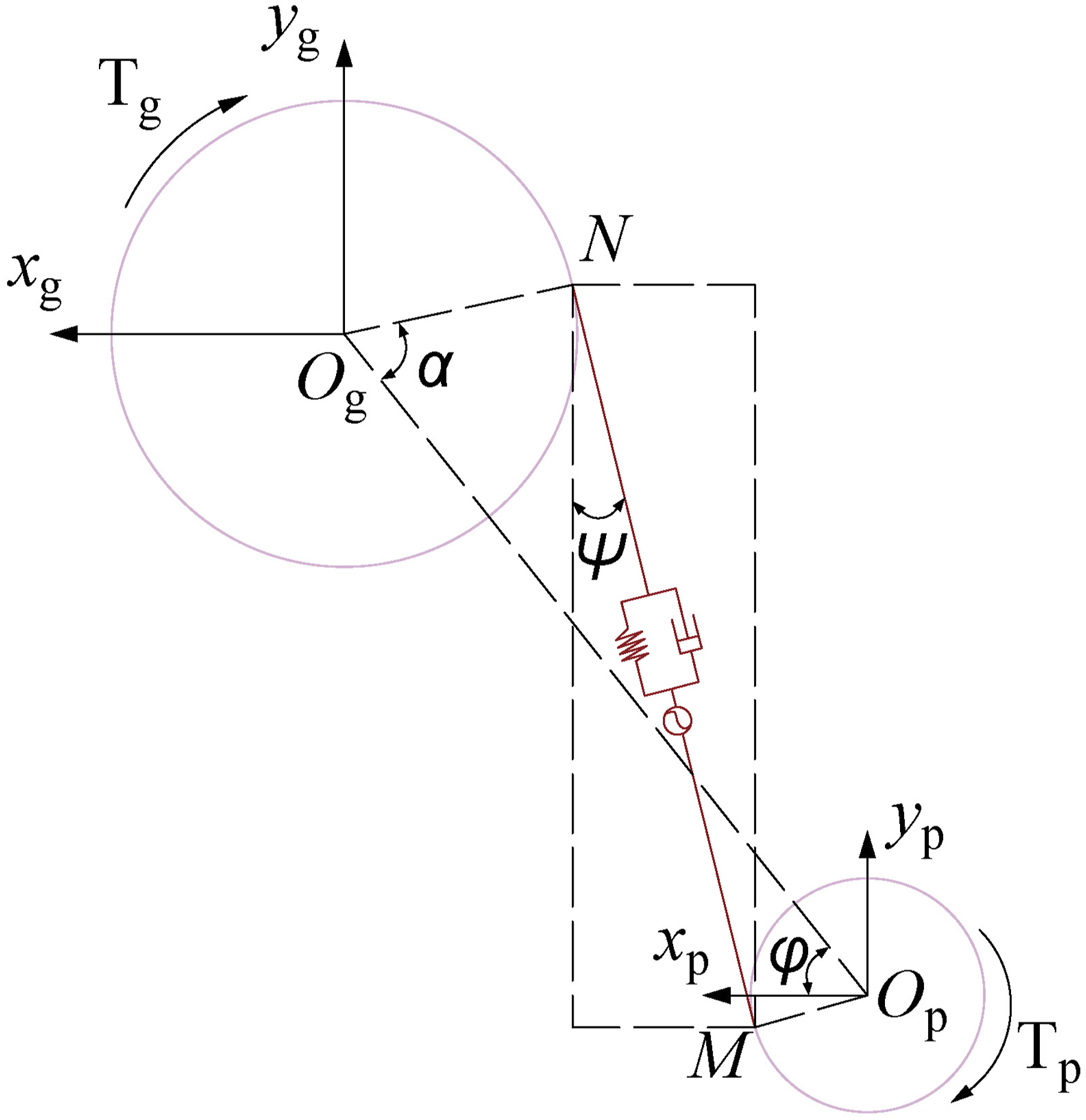
According to Figure 2, the angle between the meshing line MN and the y-axis ψ is

If the driving gear rotates anticlockwise, the angle between the meshing line MN and the y-axis ψ is

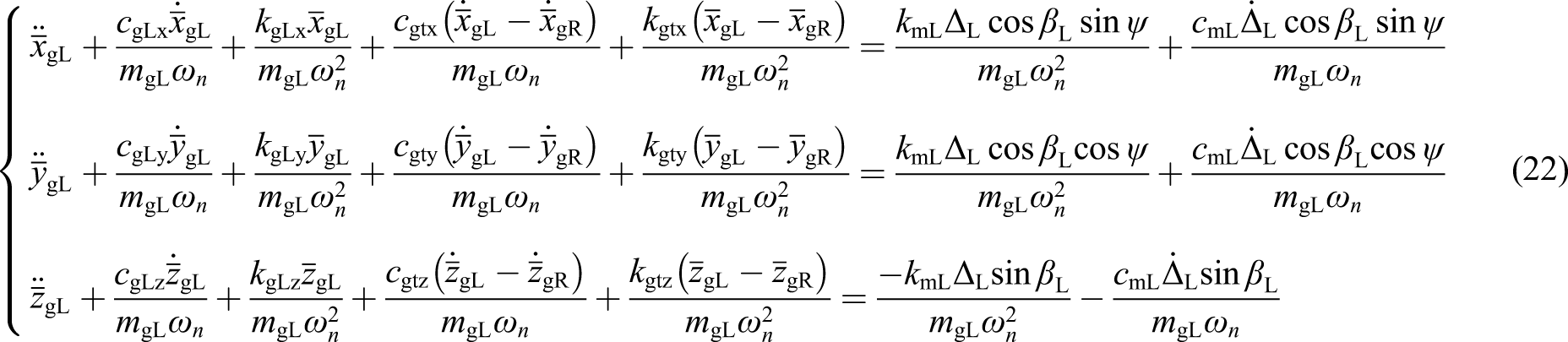
According to Newton’s second law and the structural characteristics of double-helical gear, the BTAP coupling nonlinear dynamic differential equation is established. The differential equation of left driving gear of double-helical gear is as follows
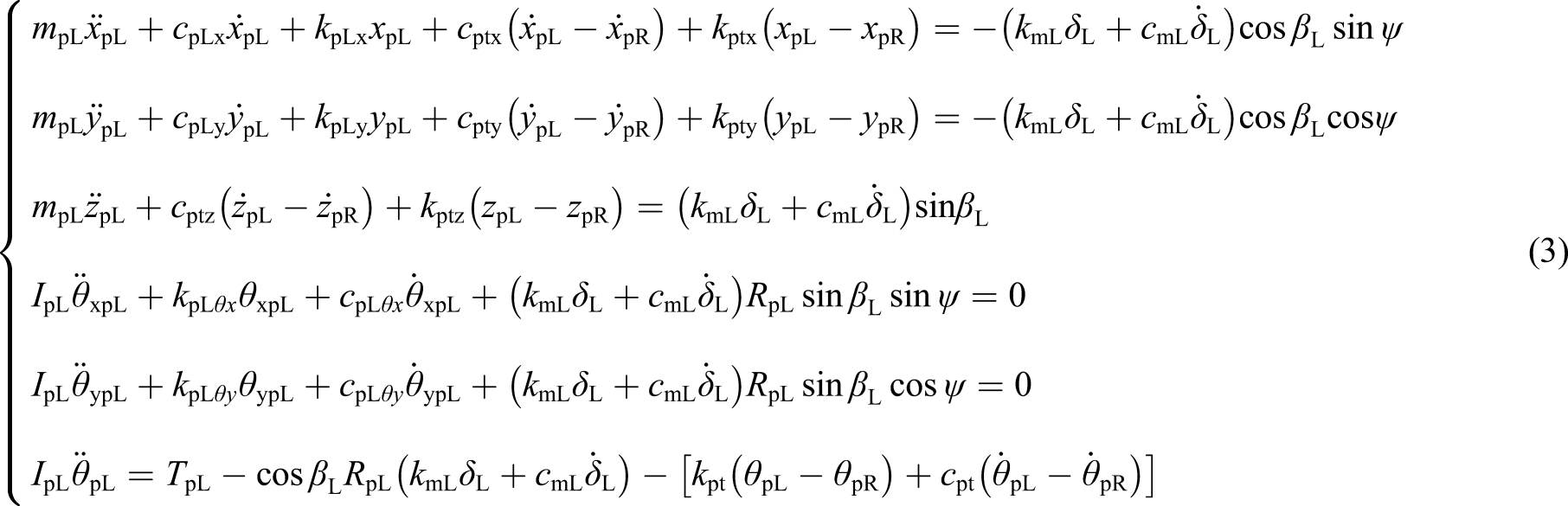
The differential equation of left driven gear of double-helical gear is as follows
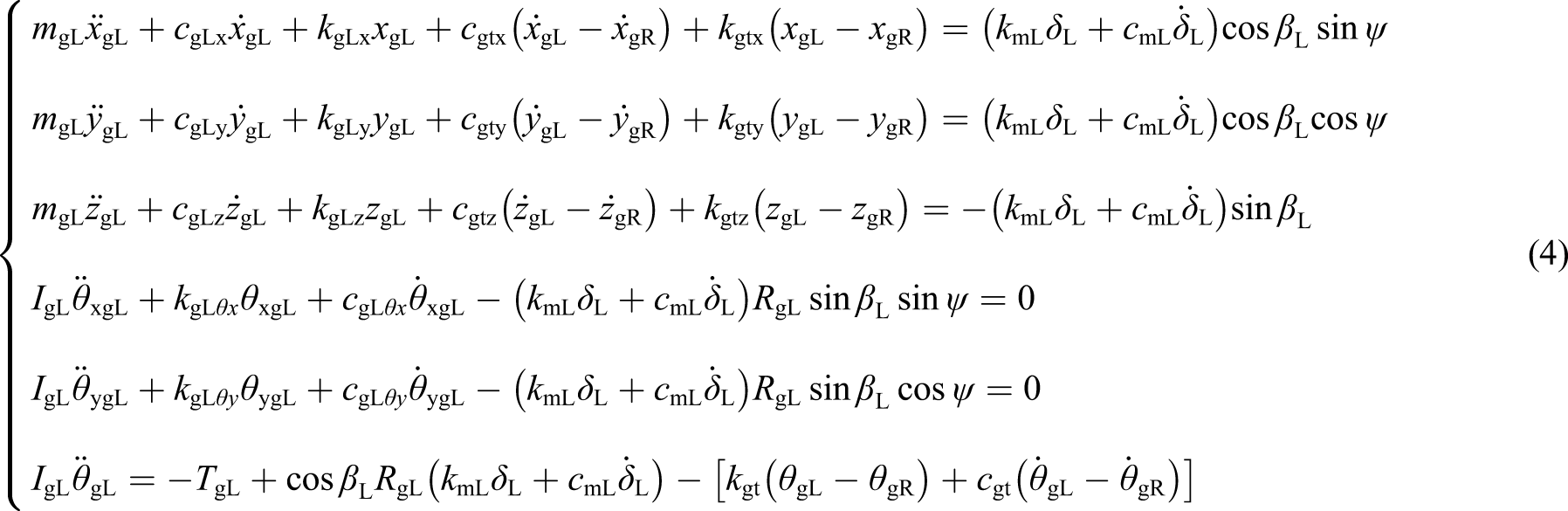
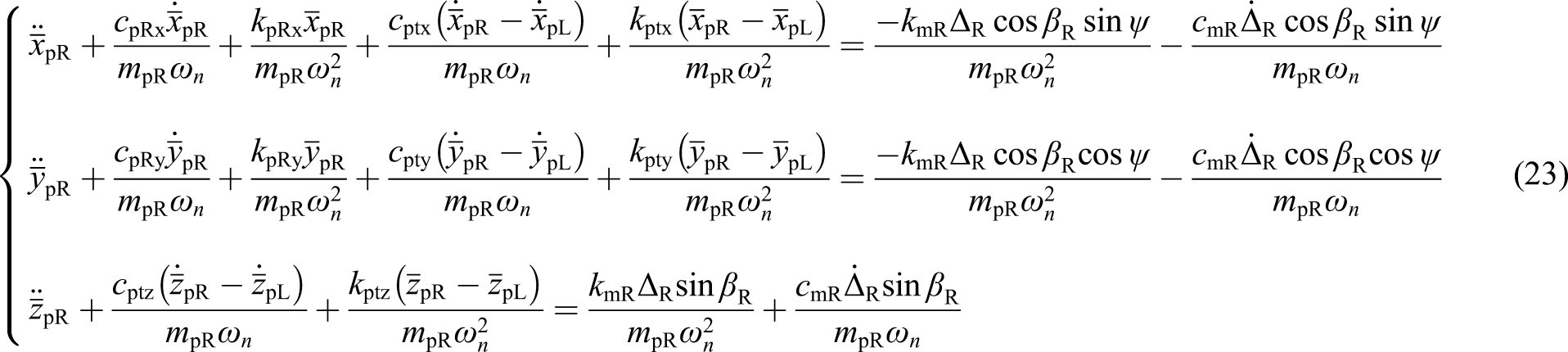
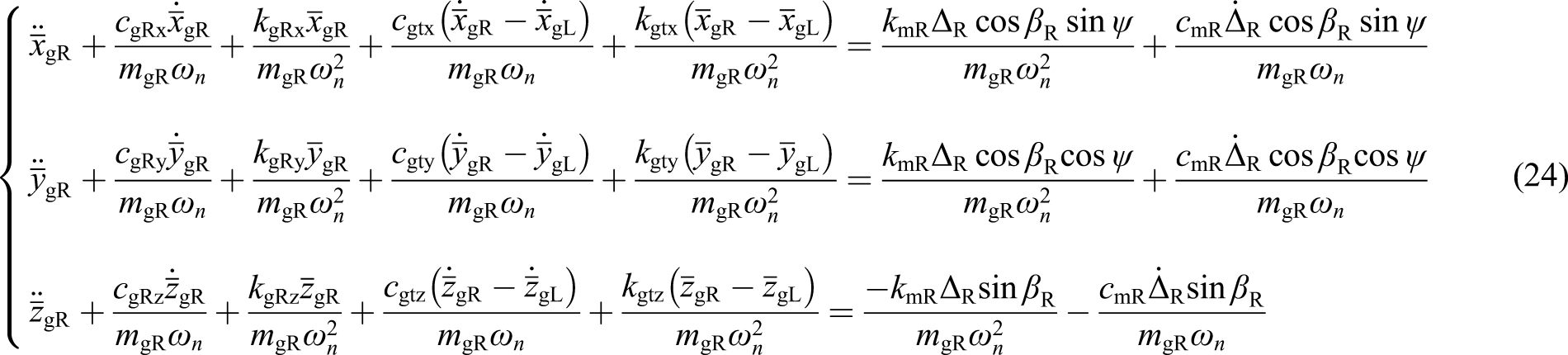
The differential equation of right driving gear of double-helical gear is as follows
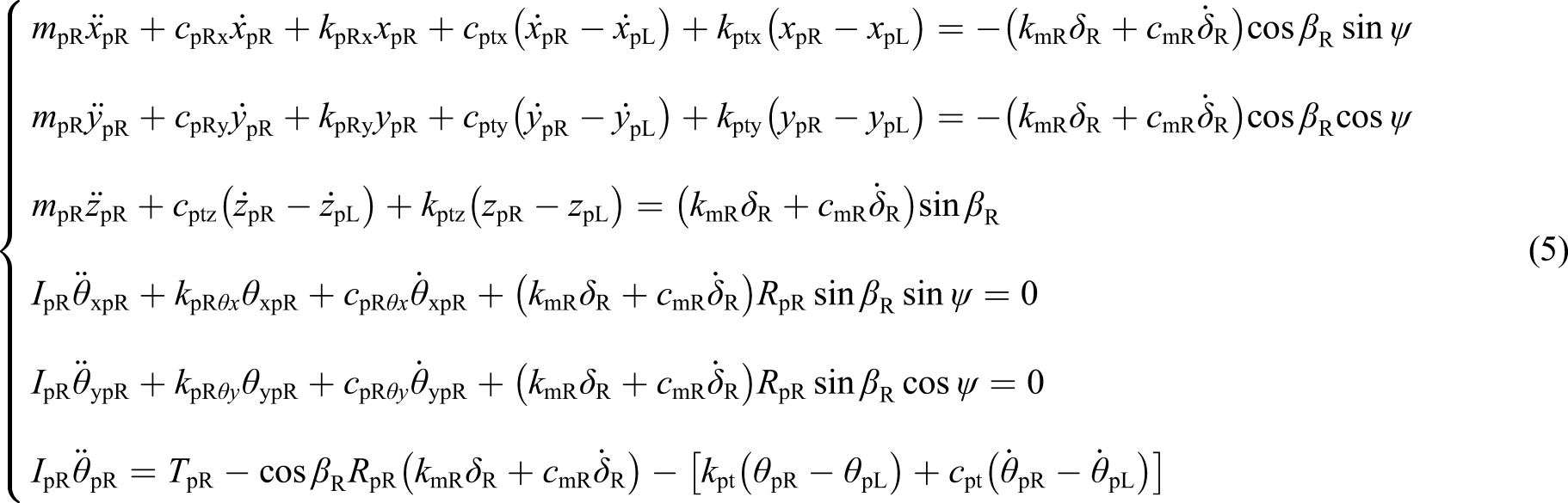
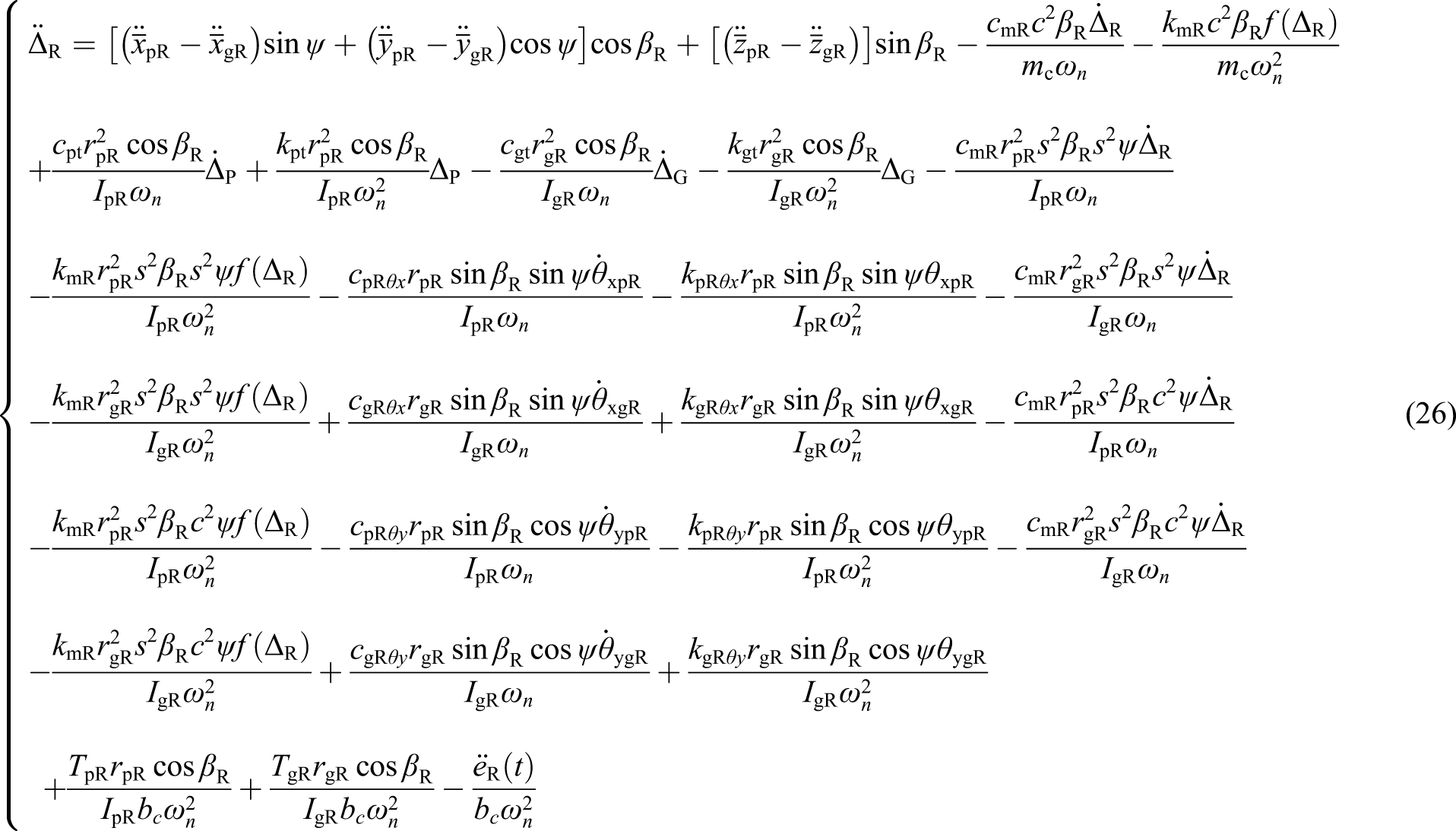
The differential equation of right driven gear of double-helical gear is as follows
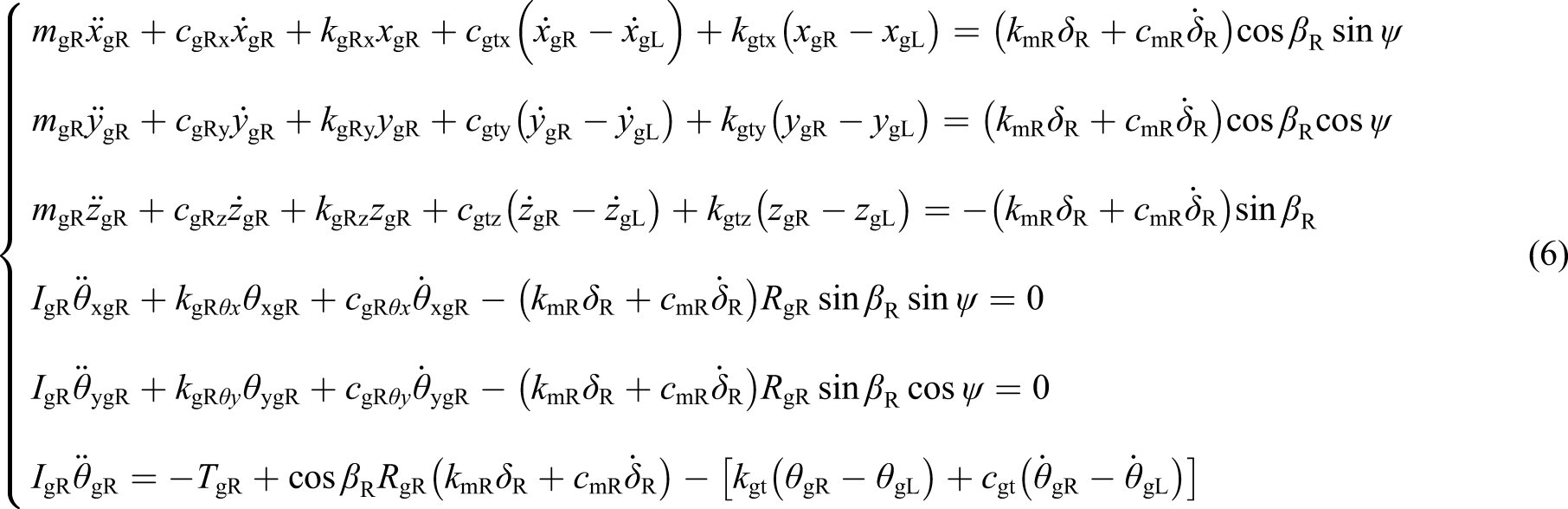
Here, I ij represents the polar moment of inertia on the equivalent nodes OpL, OpR, OgL, and OgR at the center of each helical gear. θ ij represents the rotational angular displacement of the equivalent nodes at the center of each helical gear. m ij represents the equivalent node mass at the center of each helical gear. r ij represents the base circle radius of each helical gear. β j represents the helical angle of the left and right helical gear pairs. δ j represents the relative meshing displacement of the left and right helical gear pairs. x ij , y ij , z ij , θ xij , θ yij , and θ ij respectively represent the translational vibration displacement of each equivalent node along the x, y, z directions of the coordinate axes and the rotational angular displacement around the x, y, z directions of the coordinate axes, respectively.
The time-varying meshing stiffness function and the comprehensive transmission error function are expressed in the form of Fourier series


Here, kmean is the average stiffness. ɛl is the fluctuation coefficient reflecting the change of stiffness. em is the average error. el is the fluctuation coefficient reflecting the change of comprehensive transmission error. L is the expansion order.
mc is the equivalent mass of left and right helical gear pair, which is expressed as follows

The meshing damping cmj and torsional damping cit are calculated by the following formula


According to the knowledge of material mechanics, the calculation formulas of bending stiffness, tensile stiffness and torsional stiffness of intermediate shaft section are as follows

Here, E and G are young’s modulus of elasticity and shear modulus of gear material, respectively. I
x
, I
y
and J are moment of inertia and polar moment of inertia of cross section about x and y axis, respectively, which can be calculated by formula (13). l and A are length and cross-sectional area of undercut respectively. D and d are outer diameter and inner diameter of shaft, respectively

The dynamic Equations shown in formulas (3) to (6) are expressed in matrix form as follows

M, C, K and F are the mass matrix, damping matrix, stiffness matrix, and torque vector of the system, respectively. The generalized displacement array of the system with 24 degrees of freedom is expressed as follows

Before solving the BTAP coupling dynamic Equation of double-helical gear, because of the torsional displacement of each concentrated mass in the system is not constrained, it is necessary to use the relative displacement method to eliminate the rigid body displacement of the system to solve the differential equation. In addition to the relative meshing displacements δL and δR of the left and right helical gears along the meshing line, the relative torsional linear displacements γP and γG between the adjacent helical gears in the same axis should be introduced.
The expression of relative meshing displacement in the direction of meshing line of helical gear pair at left and right ends of double-helical gear is as follows

The expression of relative torsional linear displacement of adjacent coaxial helical gears is as follows

The actual meshing displacement of double-helical gear along the meshing line is expressed as a piecewise function

Here, 2b is the length of backlash, and the expression is as follows

Here, b0 is the average backlash. W is the change of dynamic backlash to describe tooth wear.
Other dimensionless parameters can be expressed as follows
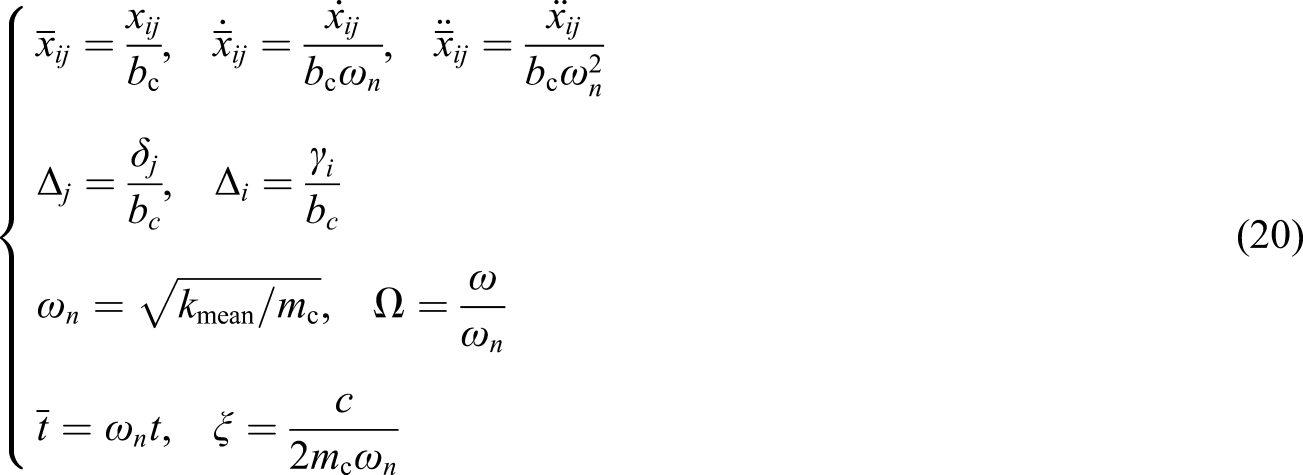
By substituting the above Equations into Equations (3) to (6), the system dynamic differential equations for eliminating rigid body displacement and dimensionalization are obtained as follows. Here, the differential equation of left driving gear of double-helical gear is as follows
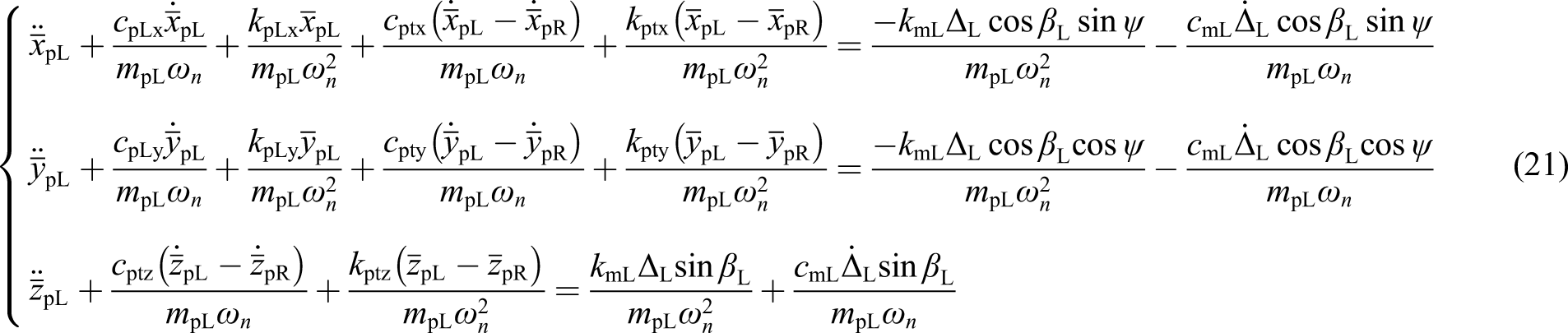
The differential equation of left driven gear of double-helical gear is as follow
The differential equation of right driving gear of double-helical gear is as follows
The differential equation of right driven gear of double-helical gear is as follows
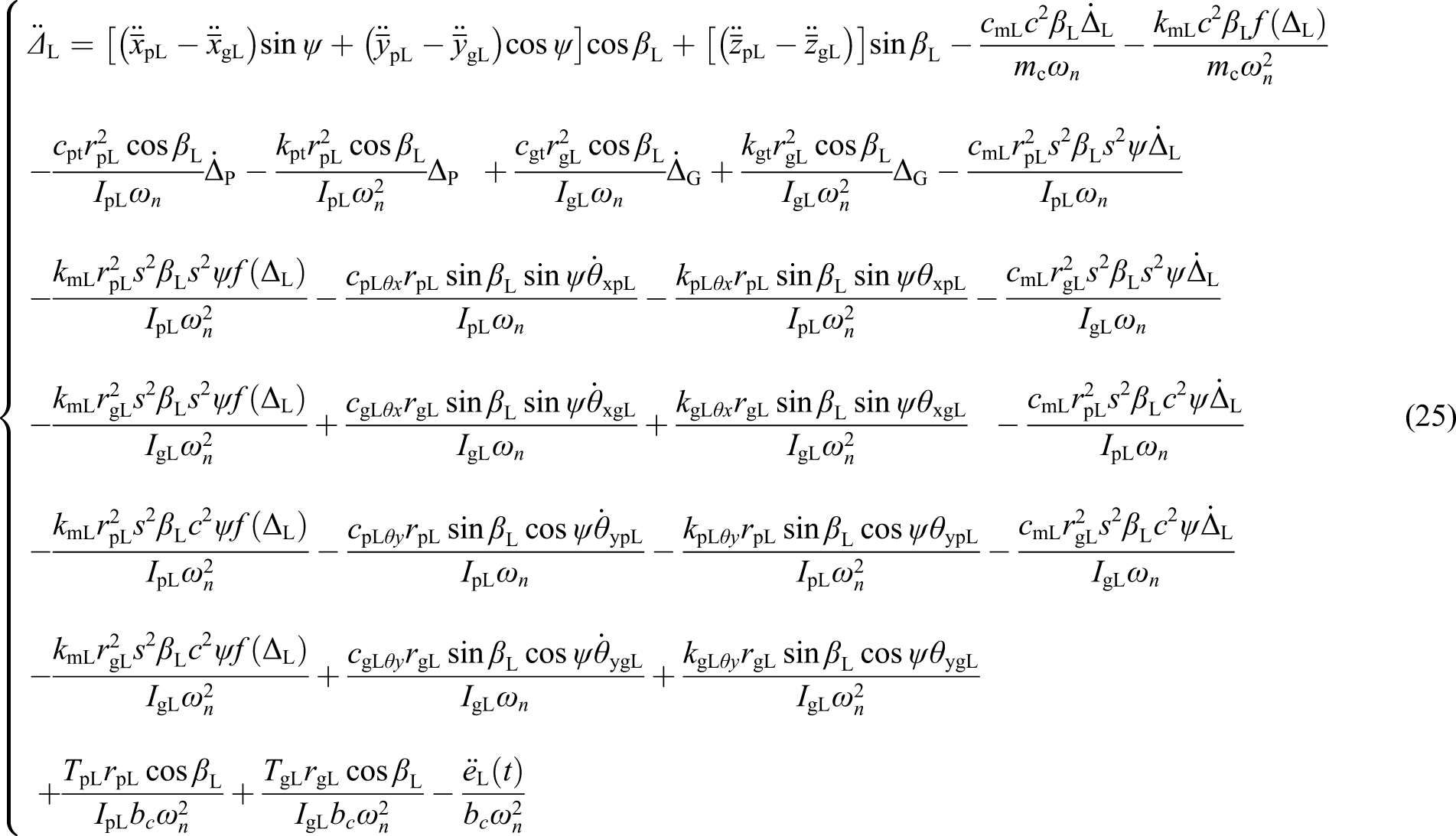
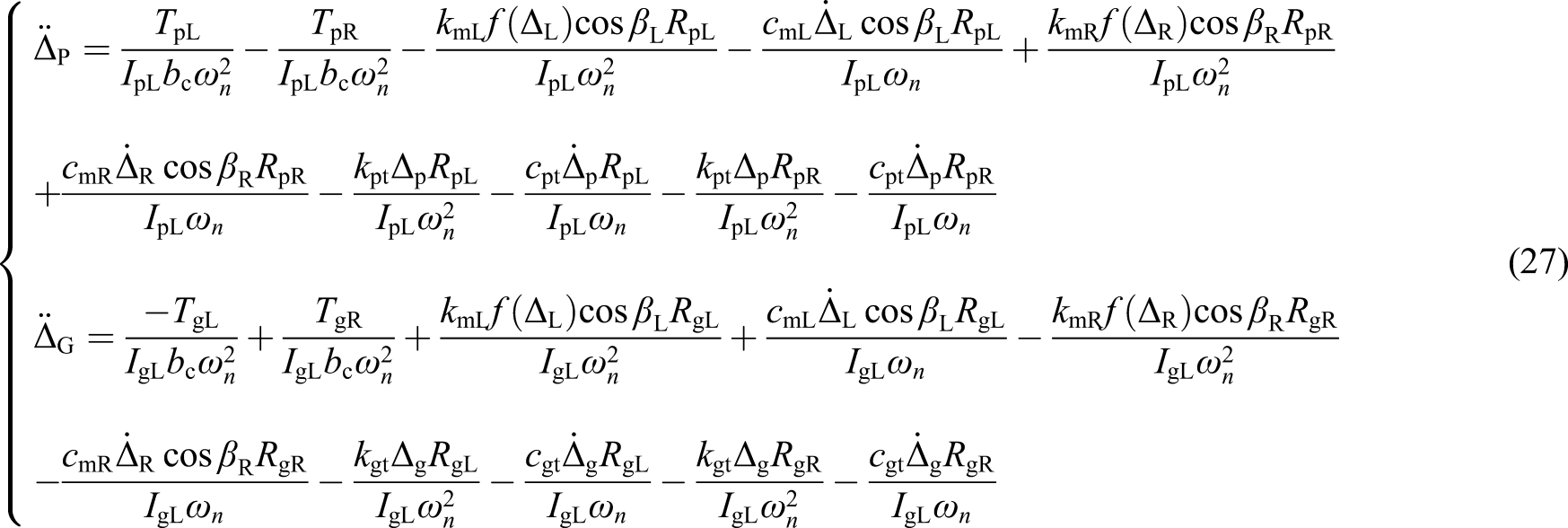
The differential equation on the meshing line of helical gear pair at the left end of double-helical gear is as follows
The differential equation on the meshing line of helical gear pair at the right end of double-helical gear is as follows
The relative torsional linear displacement differential equation of adjacent coaxial helical gears is as follows
The stiffness terms are as follows

The comprehensive transmission error term in the excitation vector is as follows

For the piecewise backlash function, taking b
c
=b0 in the dimensionless process, the backlash model is transformed into

After eliminating the rigid body displacement and dimensionalizing, the displacement vector of the system becomes

Model solving and influence analysis
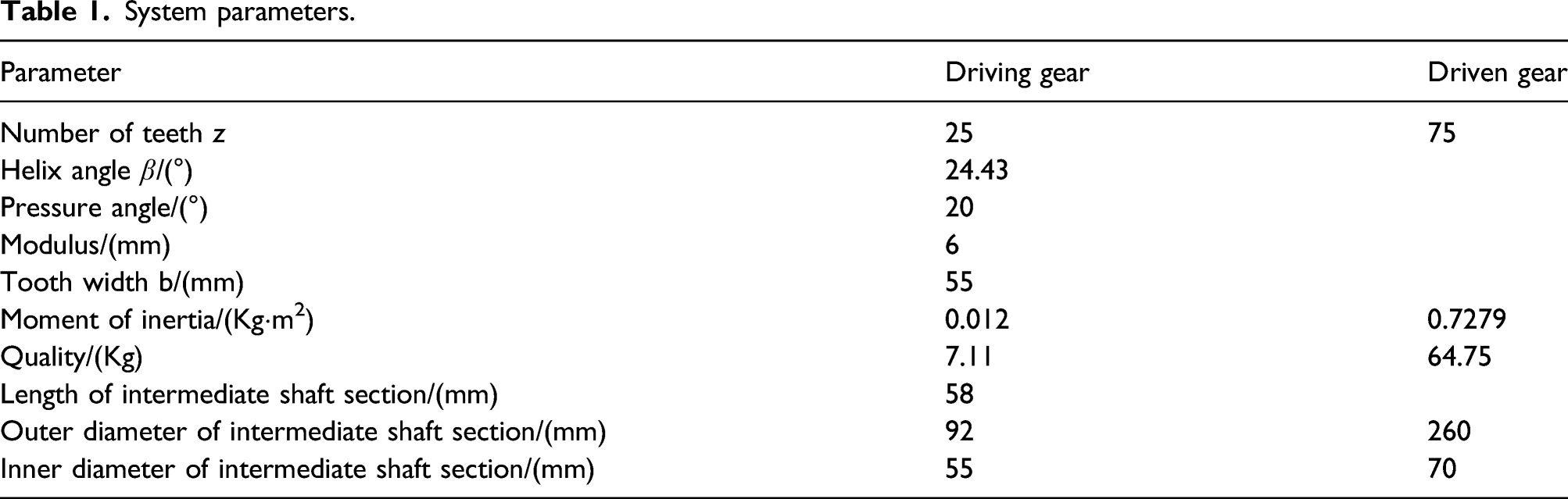
System parameters.
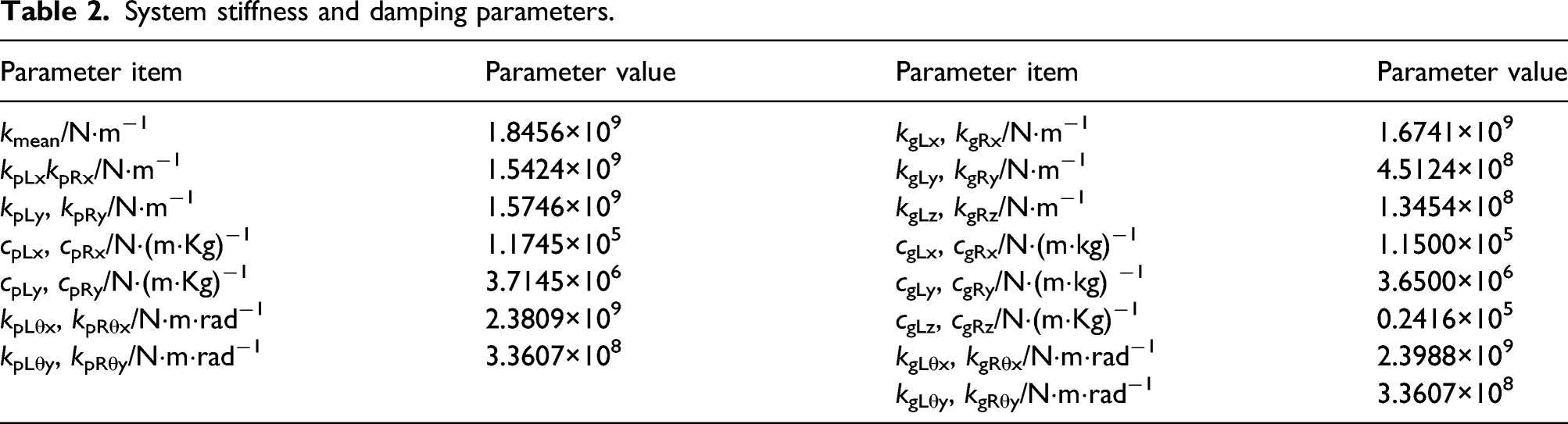
System stiffness and damping parameters.
The basic system parameters are ζ=0.063, ɛ1=0.16, ɛ2=0.07, ɛ3=0.03, e1=0.03, e2=0.01, e3=0.01, W=0. Taking the left helical gear of double-helical gear system as an example, the phase diagram and time history diagram of primary resonance response and sub-harmonic response are obtained, as shown in Figure 3. Phase diagram and time history diagram of the system at different frequencies. (a) Ω=1 (b) Ω=1/2 (c) Ω=1/3.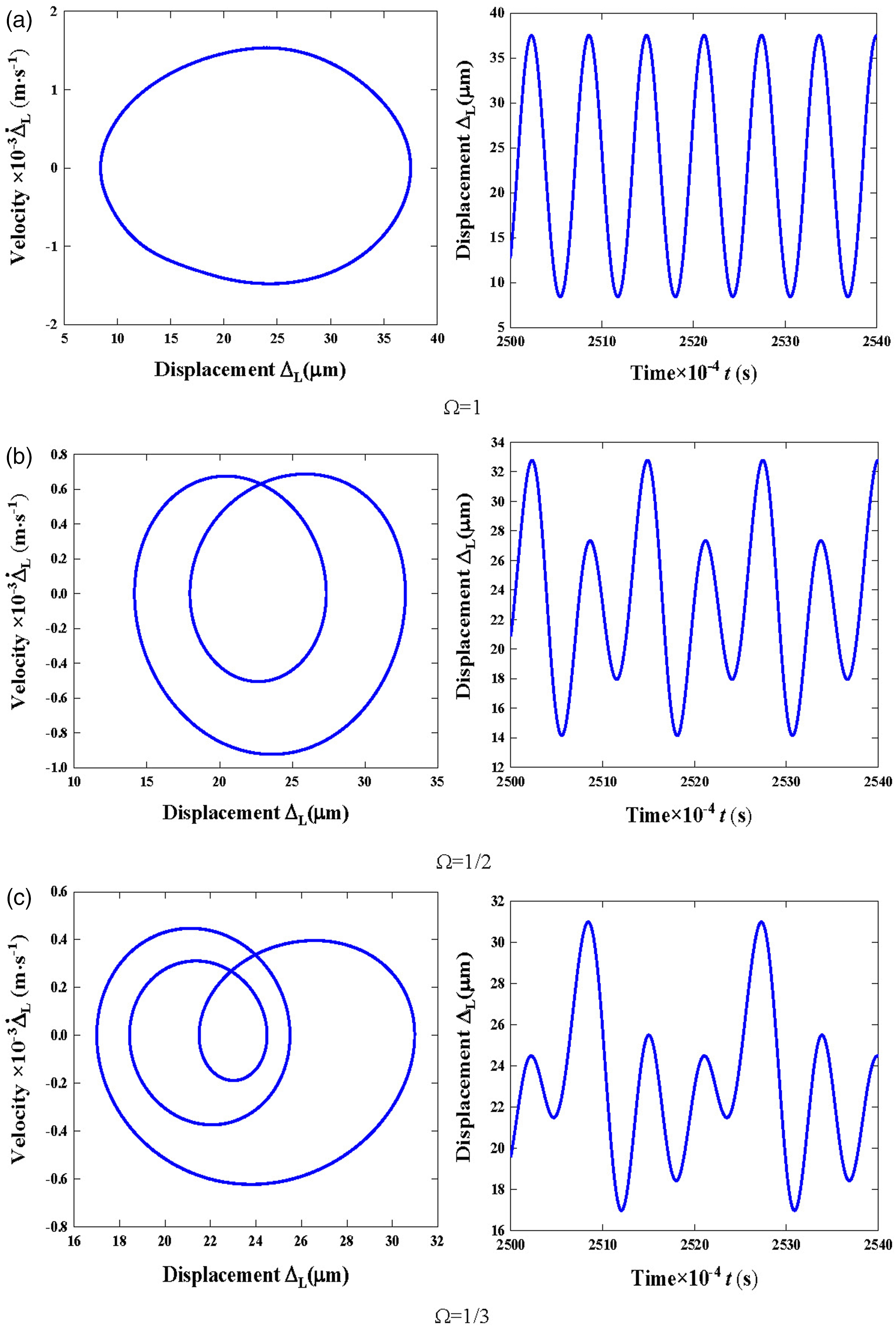
Figure 3 shows that when Ω=1, the phase diagram is approximate to ellipse, the system has a single period harmonic response, and the gear is in a unilateral impact state. When Ω=1/2, Ω=1/3, the phase diagram is non-circular closed curve, the system response is subharmonic response, and the gear is in shock free state. The superharmonic response of the system is caused by the time-varying meshing stiffness and the high-order harmonic component under dynamic excitation.
In order to fully study the nonlinear characteristics of double-helical gear under the coupling effect of time-varying meshing stiffness and backlash, the amplitude frequency characteristic curve of the system is obtained, and the results are shown in Figure 4. Amplitude frequency characteristic curves of the system.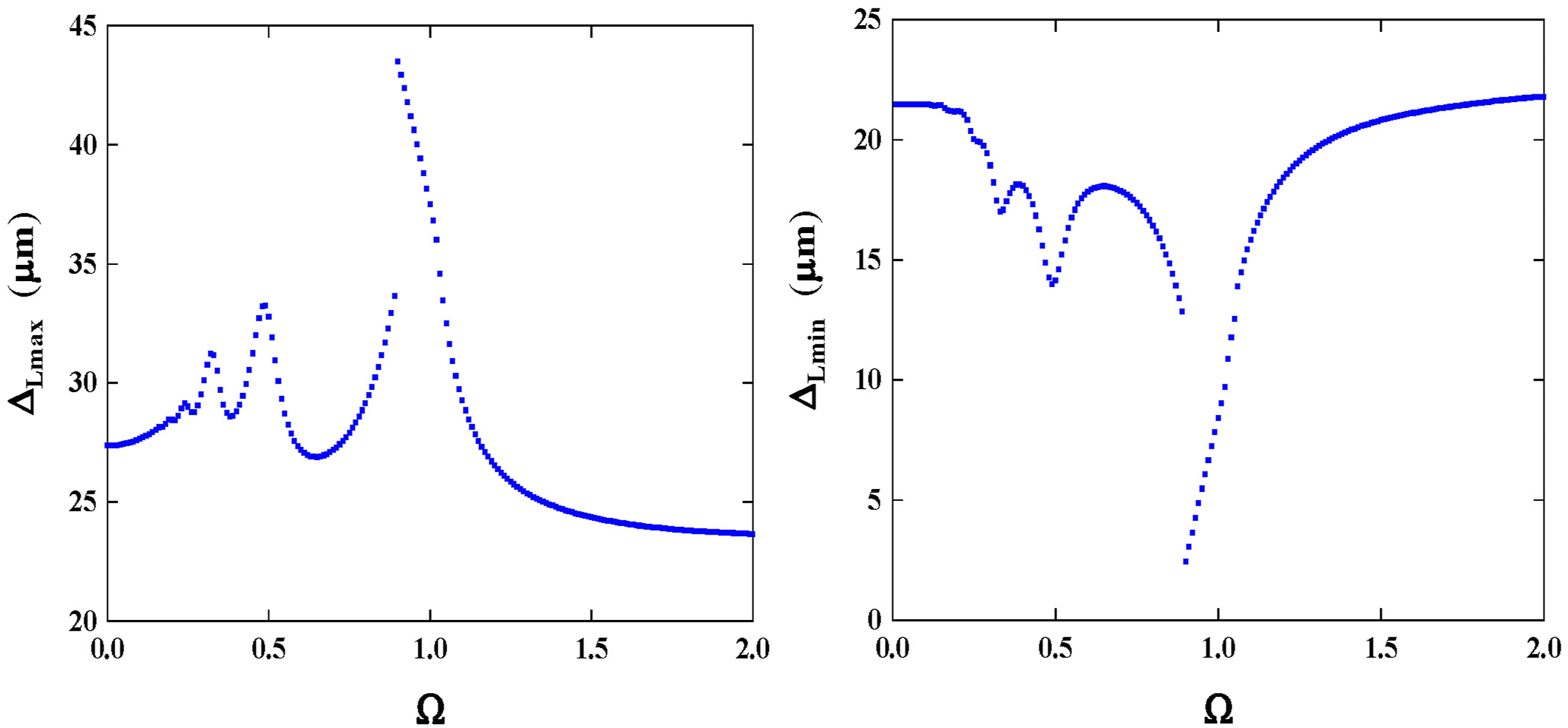
It can be seen from Figure 4, when the dimensionless excitation frequency is 0.89, the amplitude frequency characteristic curve of double-helical gear system jumps, the system includes no impact state and single-side impact state, no double-side impact state is found, and tooth back separation does not occur. The double-helical gear transmission system also has strong nonlinear dynamic characteristics caused by backlash.
The basic system parameters are ζ=0.063, ɛ1=0.16, ɛ2=0.07, ɛ3=0.03, e1=0.03, e2=0.01, e3=0.01. The influence of different constant backlash on the amplitude frequency characteristics of the system is shown in Figure 5. Amplitude frequency characteristic curves of the system with different constant backlash.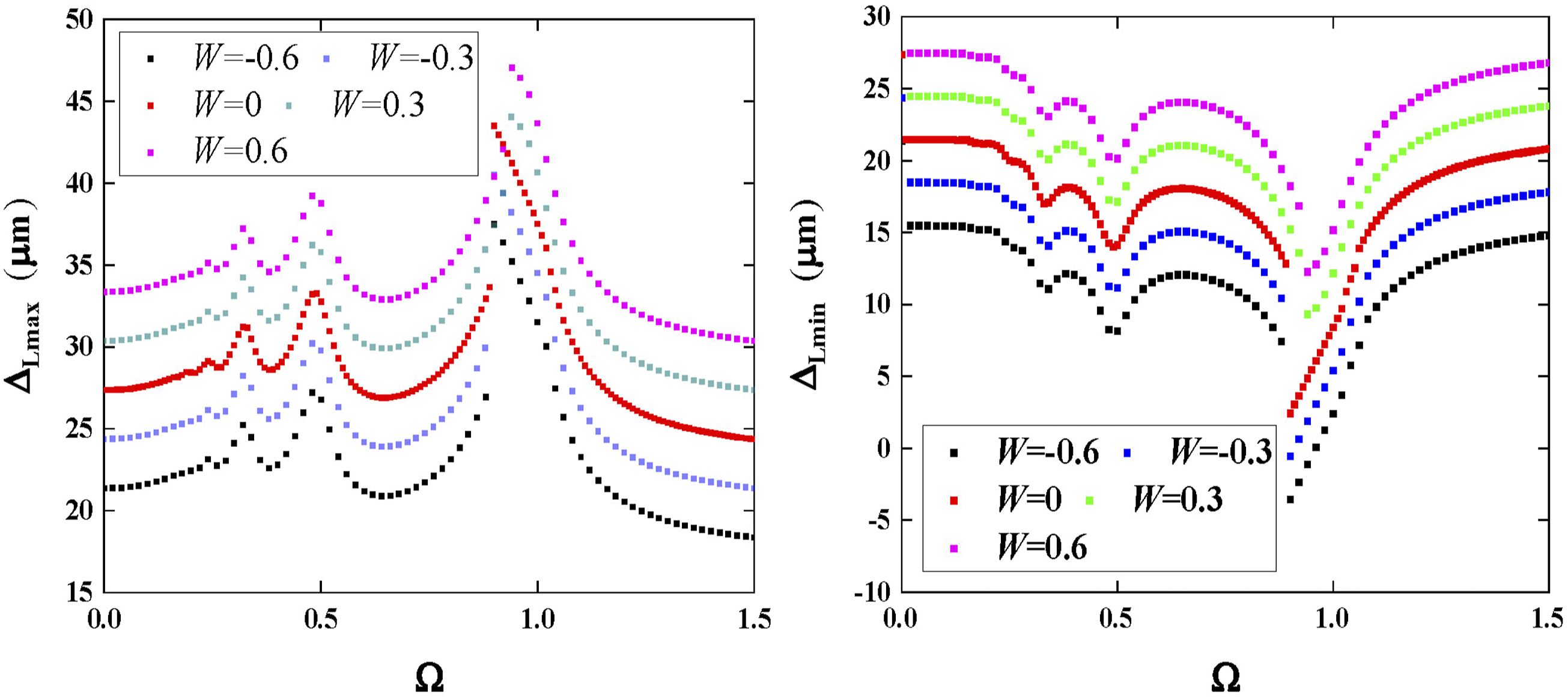
For constant backlash, five models of constant backlash are considered, (1) W=−0.6. (2) W=−0.3. (3) W=0. (4) W=0.3. (5) W=0.6. Figure 5 shows that with the increase of the constant backlash, the vibration displacement amplitude of the gear system increases and the jumping phenomenon still exists. And the step frequency of the curve jumping has a weak right tilt phenomenon, At the same time, the amplitude frequency characteristic curve has smaller peak value at Ω=1/2 and Ω=1/3 of the dimensionless frequency, which corresponds to the sub-harmonic response of the system.
Influence of system parameters on amplitude frequency characteristics
Influence of time-varying meshing stiffness on amplitude frequency curve of system
The basic system parameters are ζ=0.063, e1=0.03, e2=0.01, e3=0.01. The influence of time-varying meshing stiffness on the amplitude frequency curve of the system under different constant backlash W=0 and W=0.6 is shown in Figure 6. Three kinds of time-varying meshing stiffness fluctuation coefficients are considered: (1) ɛ1=0.16, ɛ2=0.07, ɛ3=0.03. (2) ɛ1=0.13 ɛ2=0.04, ɛ3=0.01. (3) ɛ1=0, ɛ2=0, ɛ3=0. Influence of time-varying meshing stiffness on amplitude frequency characteristic curve of system. (a) W=0 (b) W=0.6.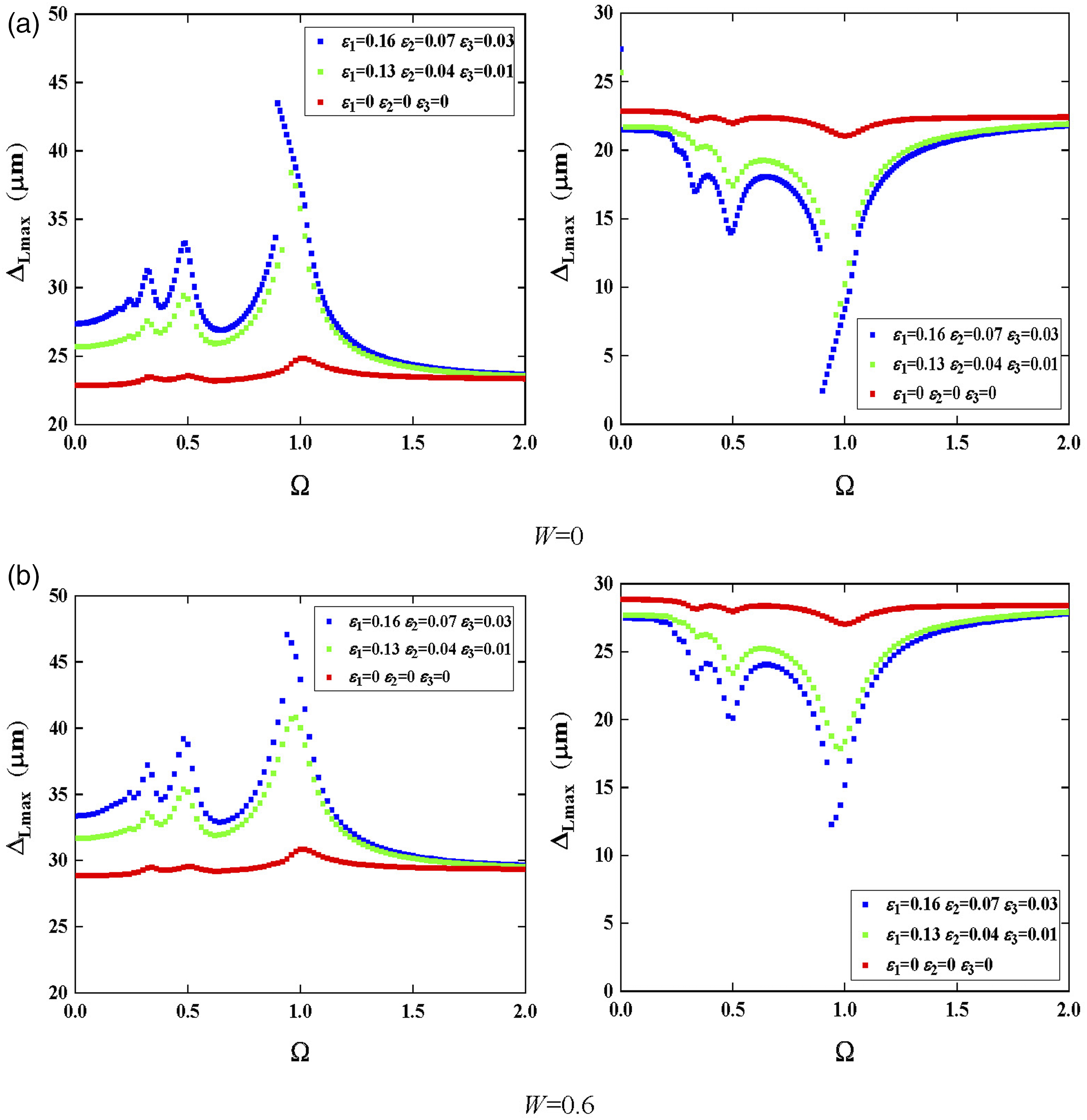
Figure 6 shows that the amplitude of amplitude frequency characteristic curve decreases with the decrease of time-varying meshing stiffness fluctuation coefficient, which is more obvious at lower frequencies. At the same time, with the decrease of the fluctuation coefficient of time-varying meshing stiffness, the jumping phenomenon of the system will gradually decrease or even disappear. Compared with W=0, when the constant clearance is 0.6, the system has shown linear vibration characteristics when the meshing stiffness fluctuation coefficient is 0.13, and the jumping phenomenon does not exist. When the meshing stiffness fluctuation coefficient is 0.16 and 0, the system state does not change, but the vibration displacement increases.
Influence of damping on amplitude frequency curve of system
The basic system parameters are ɛ1=0.16, ɛ2=0.07, ɛ3=0.03, e1=0.03, e2=0.01, e3=0.01. Under different constant backlash W=0 and W=0.6, the amplitude frequency characteristic curves of the system under different damping ratios are shown in Figure 7. Figure 7 shows that the damping can inhibit the step of the amplitude frequency characteristic curve of the system and the amplitude of nonlinear vibration displacement. Increasing the system damping can effectively control the nonlinear dynamic response of the gear system. Compared with W=0, when the constant backlash is W=0.6, the system shows linear vibration performance when the damping ratio is 0.07, and the jump phenomenon does not exist. When the damping ratio is 0.063 and 0.1, the system state does not change, but the vibration amplitude increases. Influence of damping on amplitude frequency characteristic curve of system. (a) W=0 (b) W=0.6.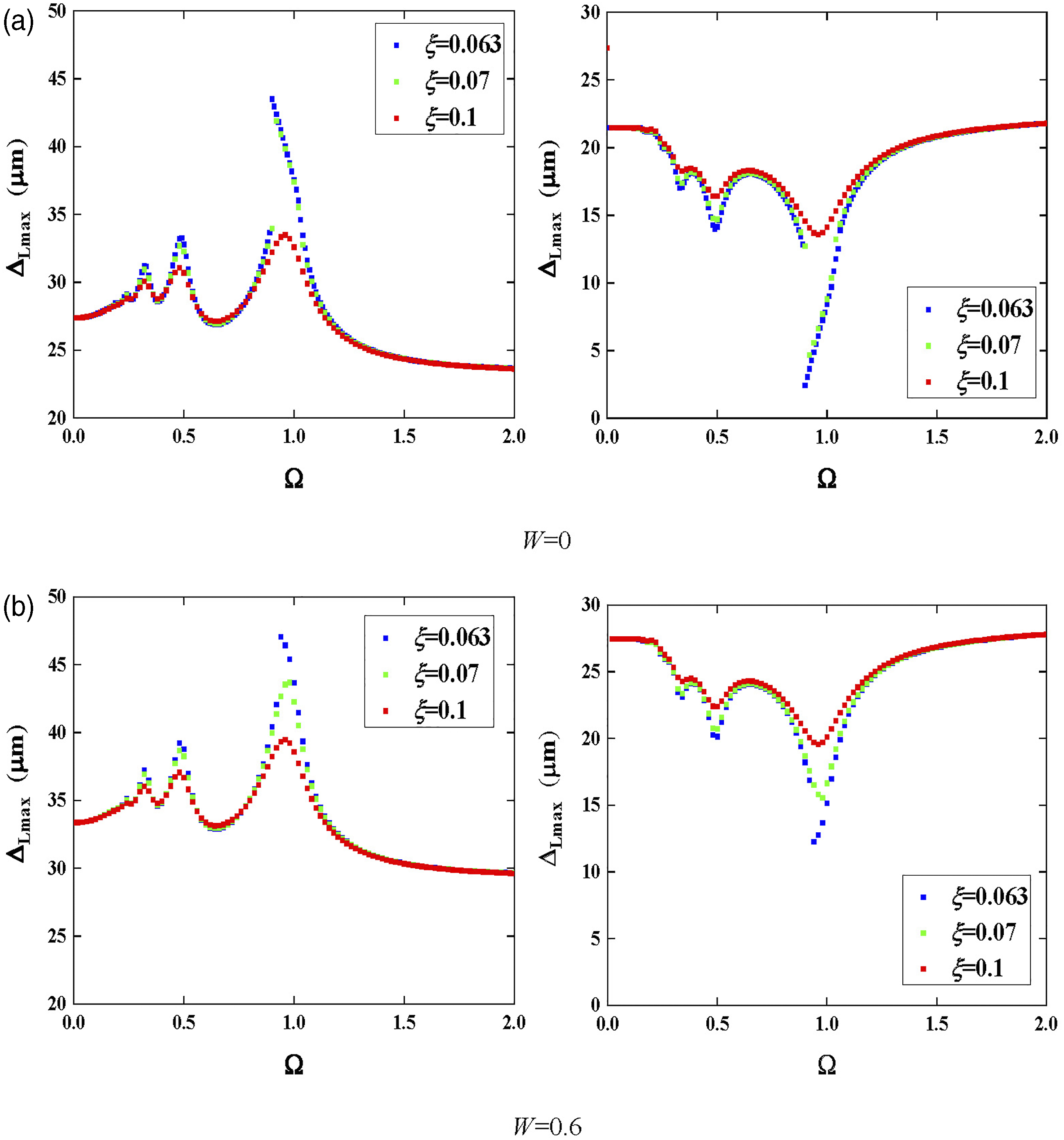
Influence of comprehensive transmission error on amplitude frequency curve of system
The basic system parameters are ζ=0.063, ɛ1=0.16, ɛ2=0.07, ɛ3=0.03. Under different constant backlash W=0 and W=0.6, the influence of comprehensive transmission error on the amplitude frequency curve of the system is shown in Figure 8. Three kinds of comprehensive transmission error amplitudes are considered: (1) e1=0.1, e2=0.05, e3=0.03. (2) e1=0.03, e2=0.01, e3=0.01. (3) e1=0, e2=0, e3=0. Influence of comprehensive transmission error on amplitude frequency characteristic curve of system. (a) W=0 (b) W=0.6.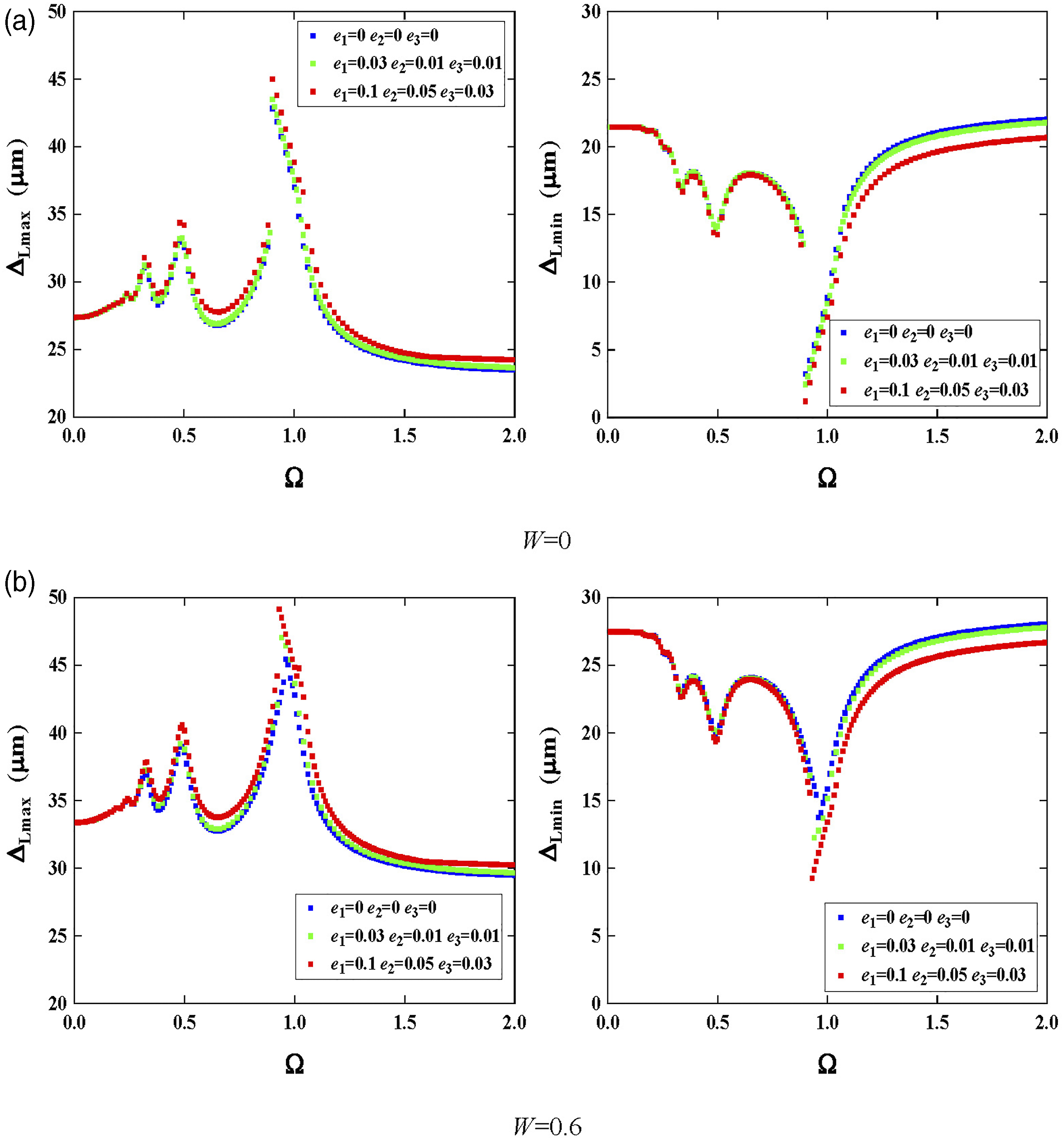
Figure 8 shows that the amplitude frequency characteristic curve of the system changes greatly with the change of the amplitude of the comprehensive transmission error. When e1=0, e2=0, e3=0, the amplitude frequency curve still has jump phenomenon, indicating that the comprehensive transmission error is not the main reason for the nonlinearity of the system. When e1=0.1, e2=0.05, e3=0.03 and e1=0.03, e2=0.01, e3=0.01, the amplitude frequency curve of the system has a greater jump, and the larger the amplitude of static transmission error, the greater the amplitude of amplitude frequency characteristic curve. With the increase of backlash, the vibration amplitude increases, and the system state does not change.
Influence of external load excitation on amplitude frequency curve of system
The basic system parameters are ζ=0.063, ɛ1=0.16, ɛ2=0.07, ɛ3=0.03, e1=0.03, e2=0.01, e3=0.01. Under different constant backlash W=0 and W=0.6, the influence of external load excitation on the amplitude frequency curve of the system is shown in Figure 9. Influence of external load excitation on amplitude frequency characteristic curve of system. (a) W=0 (b) W=0.6.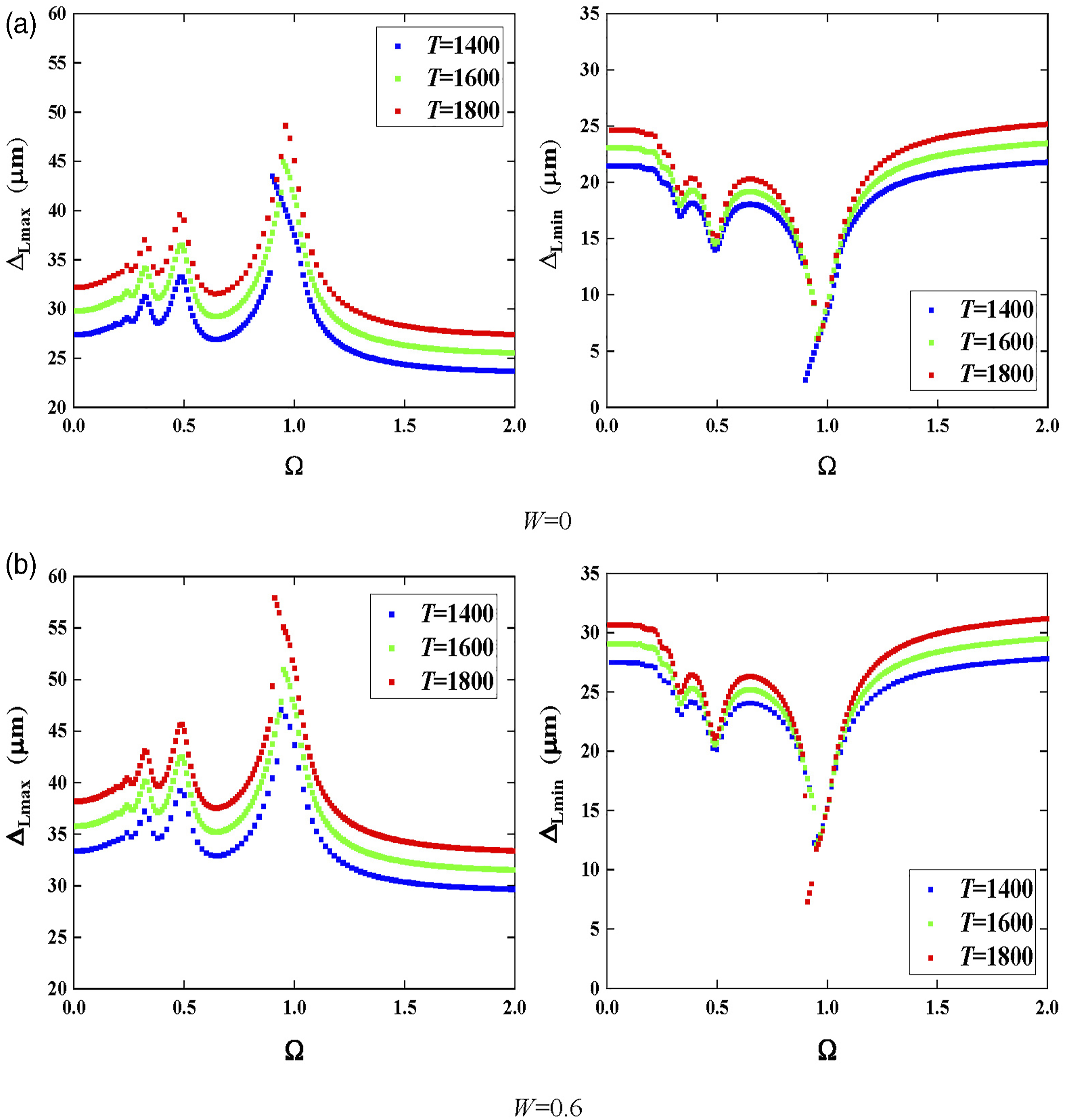
Figure 9 shows that with the increase of external load excitation, the amplitude of the amplitude frequency characteristic curve of the system increases, and the step frequency of the curve jump has a weak right inclination phenomenon. With the increase of external load excitation, the jumping phenomenon will disappear, and the system shows linear vibration characteristics. Increasing external load excitation can effectively control the nonlinear dynamic response of gear system. With the increase of backlash, the vibration displacement increases, and the system state does not change.
Test verification
The physical diagram of double helical gear vibration test device is shown in Figure 10, including control box, double helical gear vibration test bench, data collector, analysis and post-processing software, etc. Vibration testing equipment for double-helical gear.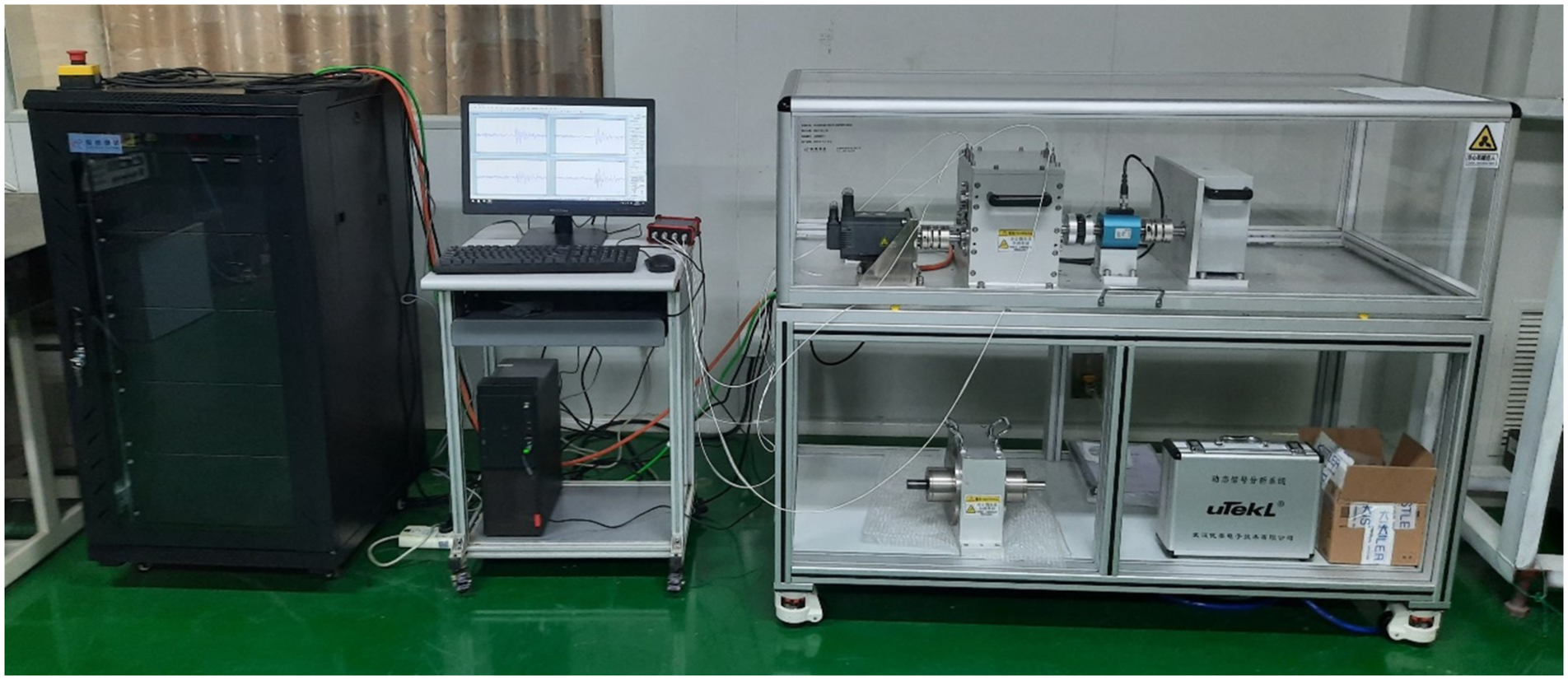
The structure diagram of double-helical gear vibration test equipment is shown in Figure 11. Structural diagram of double-helical gear vibration testing equipment. 1- Control box. 2- AC servo motor. 3, 6, 8- Elastic coupling. 4- Double-helical gear box. 5- Acceleration sensor. 7- Torque sensor. 9- Magnetic powder brake. 10- Data collector. 11- Computer. 12- Emergency stop switch.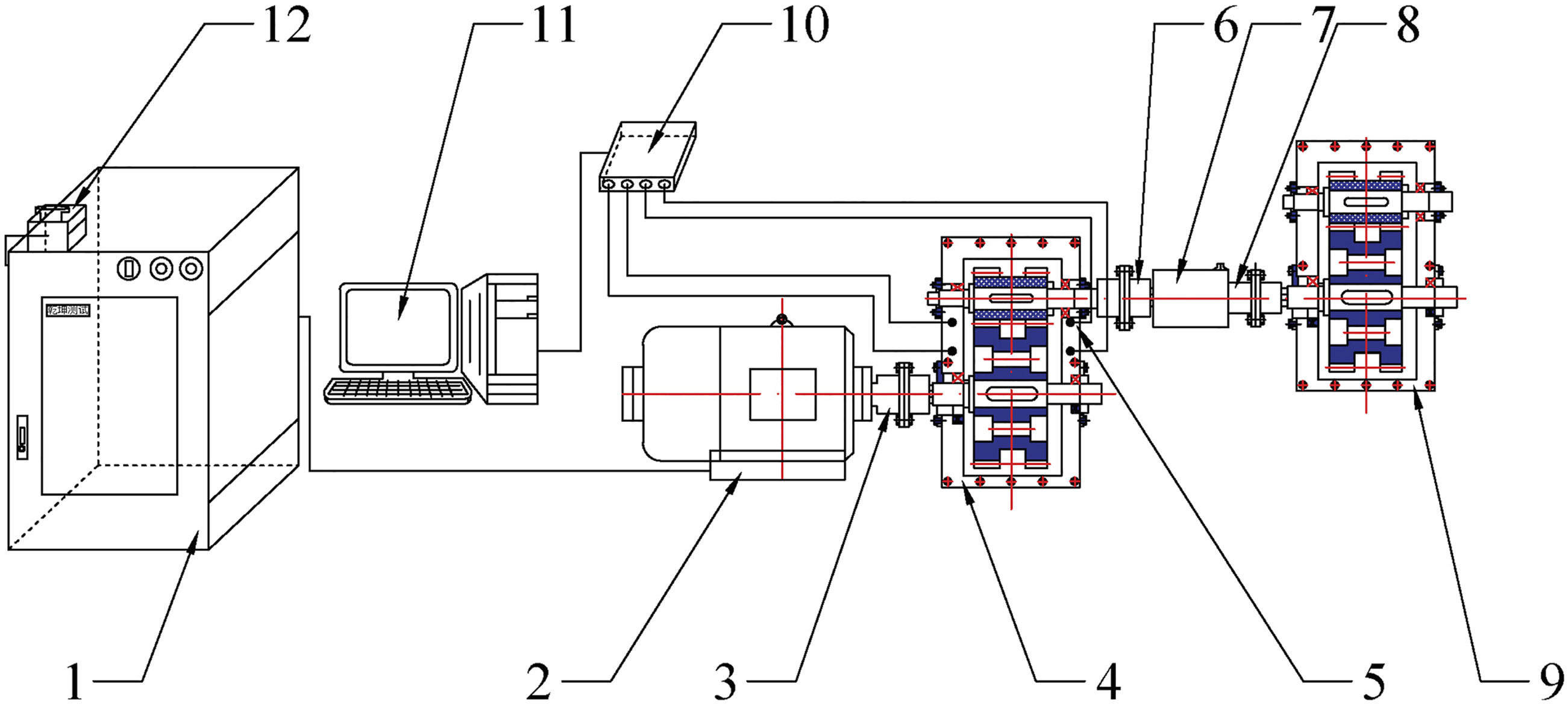
The structure of double-helical gear vibration test-bed is shown in Figure 12. The test-bed is driven by a motor which can adjust the speed through a frequency converter, and its maximum speed is 1500 r/min. Four acceleration sensors are respectively installed on the box close to the rolling bearing. There is a dial on the end cover of the gearbox, which can adjust the center distance between the driving and driven gear. Vibration test bench for double-helical gear.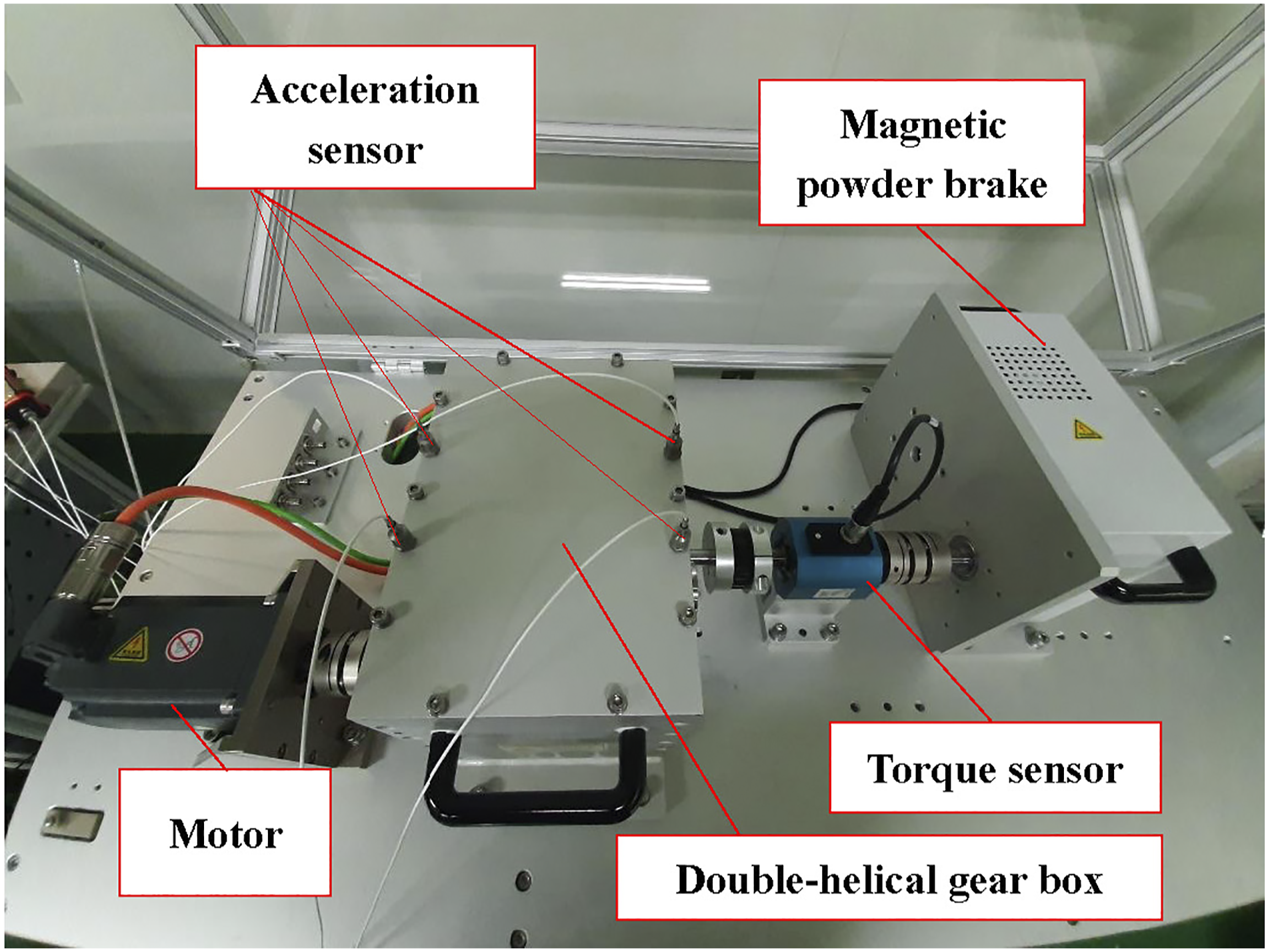
As shown in Figure 13, adjust the average backlash to 50 μm by adjusting the knob, and apply solid lubricating oil on the gears to reduce the friction between the tooth surfaces. For the acceleration signal measured by the experiment, the noise is reduced and the signal is amplified. At the same time, the displacement signal is obtained by quadratic integration. Backlash adjusting disc.
The FFT spectrum of double-helical gear system at Ω = 1/3 of the dimensionless frequency is obtained by theoretical calculation, as shown in Figure 14(a). In order to verify the theoretical reliability, the spectrum diagram of the test data at the corresponding speed of 400 r/min is measured, as shown in Figure 14(b). FFT Spectrum at the speed of 400 r/min. (a) Theoretical data (b) Experimental data.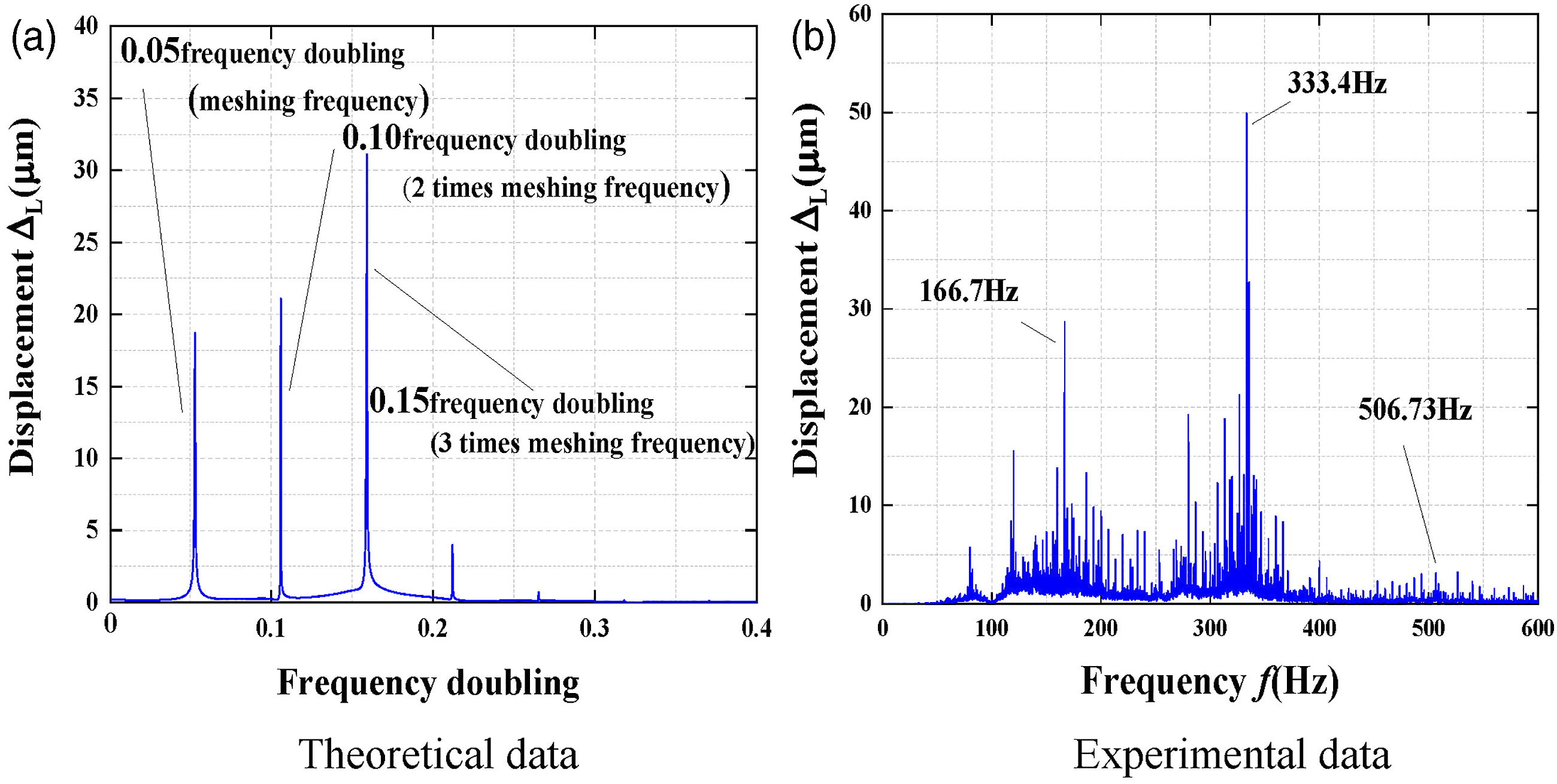
As shown in Figure 14(b), when the rotating speed is 400r/min, the vibration displacement spectrum measured in the test mainly includes 166.7 Hz of meshing frequency, 333.4 Hz twice of meshing frequency and 506.73 Hz three times of meshing frequency. Comparing the theoretical calculation results with the experimental measurement results, the theoretical calculation results are basically the same as the experimental measurement results.
The FFT spectrum of double-helical gear system at Ω=1/2 of the dimensionless frequency is obtained by theoretical calculation, as shown in Figure 15(a). In order to verify the theoretical reliability, the spectrum of test data at the corresponding speed of 600r/min is measured, as shown in Figure 15(b). FFT Spectrum at the speed of 600 r/min. (a) Theoretical data (b) Experimental data.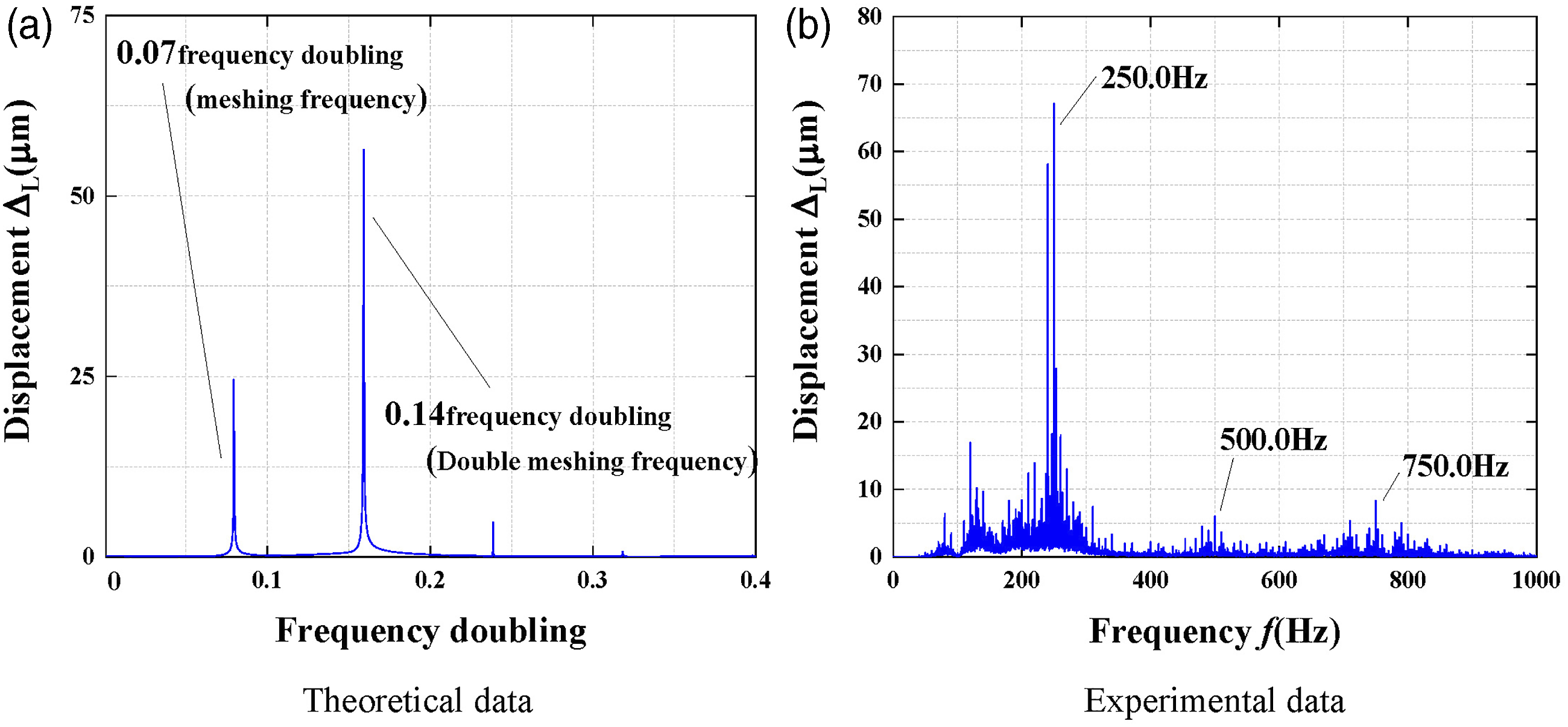
Figure 15(b) shows that when the rotating speed is 600r/min, the vibration displacement spectrum measured in the test mainly includes 250 Hz of meshing frequency, 500 Hz twice of meshing frequency and 750 Hz three times of meshing frequency. Comparing the theoretical calculation results with the experimental measurement results, the theoretical calculation results are basically the same as the experimental measurement results, and the difference between them is that there is no third harmonic generation of meshing frequency in the theoretical calculation.
The FFT spectrum of double-helical gear system at dimensionless frequency Ω=1 is obtained by theoretical calculation, as shown in Figure 16(a). In order to verify the theoretical reliability, the spectrum of test data at corresponding speed of 1200r/min is measured, as shown in Figure 16(b). FFT Spectrum at the speed of 1200 r/min. (a) Theoretical data (b) Experimental data.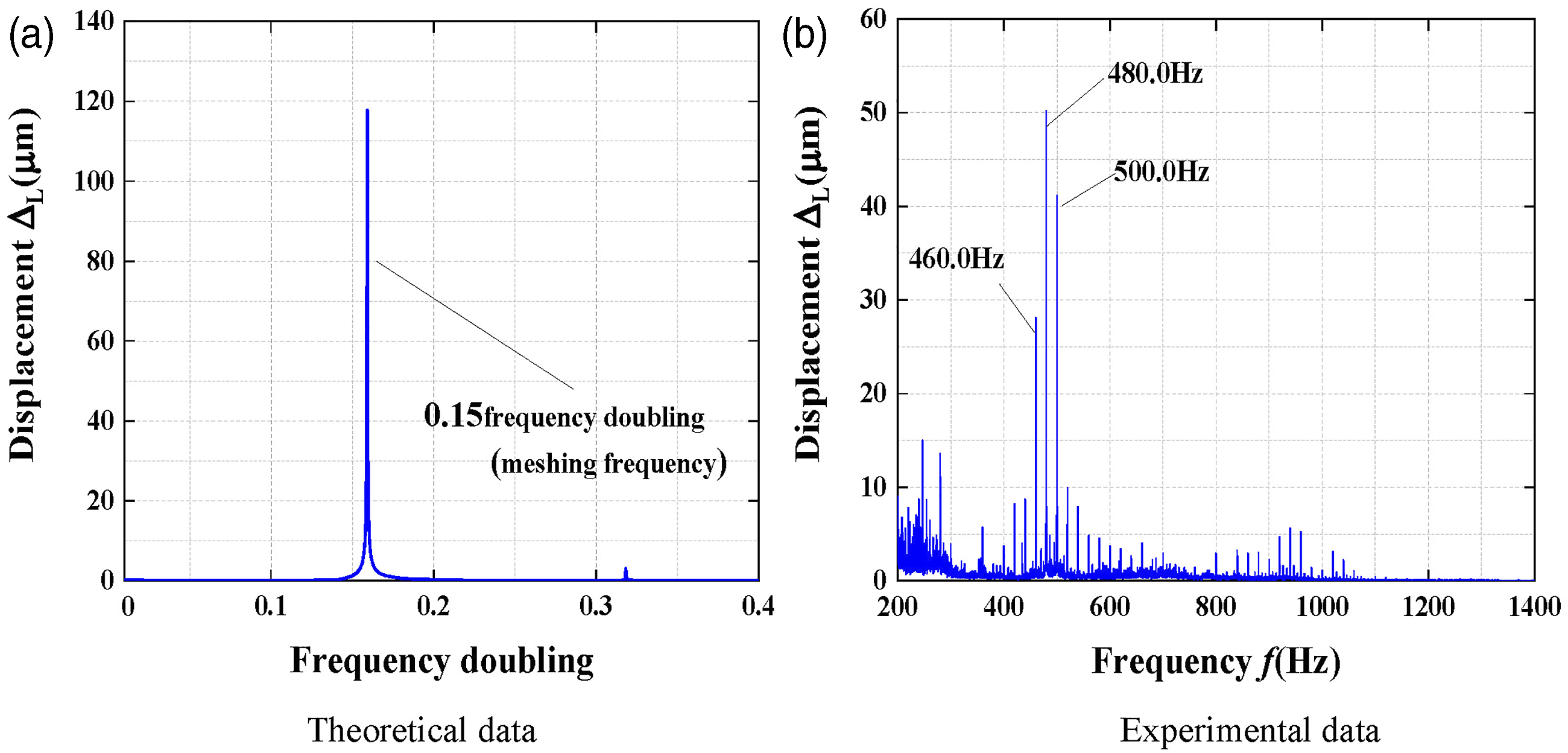
As shown in Figure 16(b), when the rotating speed is 1200r/min, the meshing frequency is 480.0 Hz, and an obvious sideband is formed near the meshing frequency, and the interval of sideband is twice of the rotating frequency. Comparing the theoretical calculation results with the experimental measurement results, the theoretical calculation results are basically the same as the experimental measurement results, and the difference between them is that there is no sideband near the meshing frequency in the theoretical calculation.
The test results show that the frequency components of the theoretical calculation results and the test results are the same, but there are manufacturing errors, installation errors and measurement errors in the test, which will produce certain errors with the numerical simulation. These factors will lead to different degrees of frequency component response.
When the test speed is 1200r/min, the displacement spectrum under different backlash b is shown in Figure 17. Displacement spectrum under different backlash at the speed of 1200 r/min. The variation of displacement amplitude with rotation speed under different backlash is shown in Figure 18. (a) b=50.77 μm (b) b=51.02 μm (c) b=51.20 μm (d) b=51.27 μm. Variation of displacement amplitude with rotating speed under different backlash.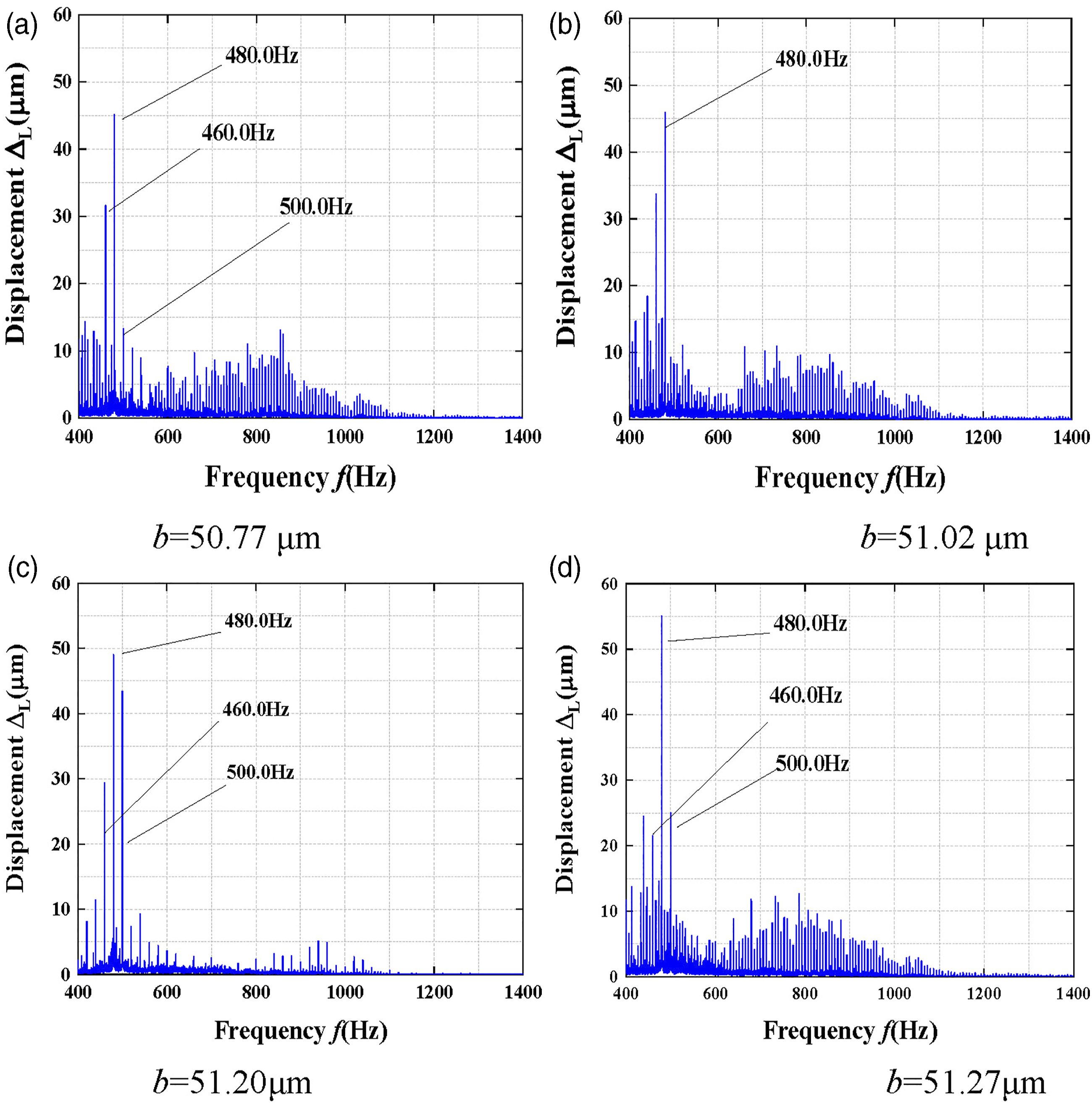
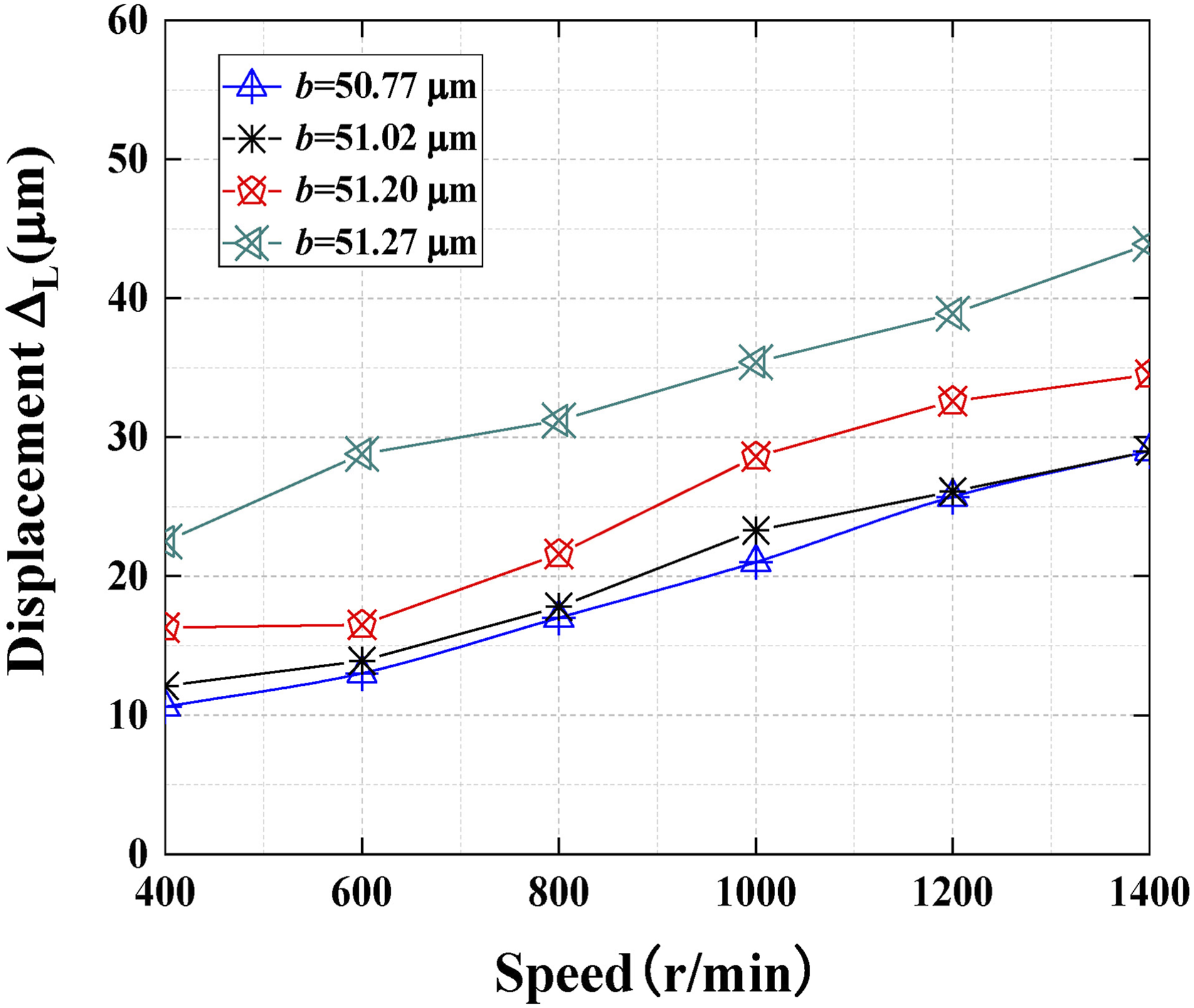
The results show that the displacement amplitude increases with the increase of backlash at the same speed. Under the same backlash, the displacement amplitude increases gradually with the increase of rotational speed from 400 r/min to 1400 r/min. The experimental results are the same as the theoretical results, which further verify the reliability of the theory.
Conclusions
A nonlinear BTAP coupling dynamic modeling of double-helical gear is established considering backlash, time-varying meshing stiffness, damping, comprehensive transmission error and external load excitation, which improves the accuracy of the traditional model and is closer to the actual working state of double-helical gear. At the same time, the influence of each parameter on the frequency response characteristics of the system is analyzed, the results are as follows 1. The double helical gear system has the strong nonlinear characteristics of jump caused by backlash, as well as the main resonance response and subharmonic response. The generation of super harmonic response solution is caused by time-varying mesh stiffness and higher harmonic component under dynamic excitation. 2. With the increase of backlash, the vibration displacement amplitude of the gear system increases and the jumping phenomenon remains unchanged. 3. The amplitude frequency response of the system is excited by time-varying meshing stiffness and comprehensive transmission error, while the amplitude frequency response is constrained by damping and external load excitation. The increase of constant backlash will increase the amplitude of vibration displacement and has little effect on the change of system state. 4. The frequency components of the theoretical results are basically consistent with the experimental results. At the same speed, the system amplitude increases with the increase of backlash. Under the condition of the same backlash, the amplitude of the system increases with the increase of the speed in a certain range. The experimental results verify the correctness of the theory.
Footnotes
Author contributions
All authors contributed to the study conception and design. Material preparation, data collection, and analysis were performed by HD, YB, WB, ZBL, and LBW. The first draft of the manuscript was written by HD, and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by National Natural Science Foundation of China (NSFC) (51705390), Innovation Capability Support Program of Shaanxi (2020KJXX-016), Scientific Research Program Funded by Shaanxi Provincial Education Department Program (20JC015), Principal foundation project of Xi’an Technological University (xgpy200201) and the Natural Science Foundation of Shaanxi Province (2021JM-428)
Code availability
All data, models, and code generated or used during the study appear in the article.
Data availability
The raw/processed data required to reproduce these findings cannot be shared at this time as the data also form part of an ongoing study.