
Abstract
This paper addresses the problem of adaptive tracking control for a class of stochastic nonlinear systems with time-varying input delays, and the nonlinear functions of the systems are with not only the unknown parameters but also the unknown state time-varying delays, which is different from the previous work. In this paper, through a state transformation, the system can be easily transformed into a system without the time-varying input delay; the appropriate Lyapunov–Krasovskii functionals are used to compensate the unknown time-varying delay terms, and the quadratic functions instead of the quartic functions often utilized in the existing results are used as Lyapunov functions to analyze the stability of systems and the hyperbolic tangent functions are introduced to deal with the Hessian terms. Fuzzy logic systems (FLSs) in Mamdani type are used to approximate the unknown nonlinear functions. Then, based on the backstepping technique, the adaptive fuzzy controller is designed. The three main advantages of the developed scheme are that (i) unlike the existing results which deal with the nonlinearly parameterized functions by using the separation principle, the nonlinearly parameterized functions are lumped into the continuous functions which can be approximated by using the FLS; (ii) the number of the adjusted parameters only depend on the order of the investigated systems, which can reduce the computational burden greatly; and (iii) the existence of the time-varying input delay such that the controller design becomes much more difficult, and in this paper, it can be dealt with by using an appropriate state transformation. It is proven that all the signals of the closed-loop system are semi-globally uniformly ultimately bounded in probability, whereas the tracking error converges to a small neighborhood of the origin. Finally, simulation results are provided to show the effectiveness of the proposed approach.
Keywords
Introduction
In the past decades, the adaptive fuzzy or neural network (NN) control design for uncertain stochastic nonlinear systems has received increasing attention, such as1–4,39 many fuzzy problems can be effectively solved by either the homotopy perturbation method 5 or the variational iteration method, 6 both methods were proposed by Chinese mathematician, Dr. Ji-Huan He. 7 Based on Itô stochastic differential equation and backstepping design technique, many adaptive fuzzy control design results obtained for deterministic nonlinear systems were extended to those stochastic nonlinear systems, for example, references. 8–12 and the references therein. However, in consequence of the appearance of higher order Hessian matrix term in the infinitesimal generator, the quartic functions and the Young inequality are combined to design the controller and analyze the stability of the closed-loop systems in the most of the existing results, such as the references 13–15, and so on, and according to these references, it can be seen that this kind of controller design scheme is very complex. In order to optimize the control theory of the stochastic nonlinear systems, in references 11 and 12, the classical quadratic functions instead of the quartic functions are used as Lyapunov functions to analyze and synthesize of stochastic nonlinearly parameterized systems with distributed input delay and stochastic nonlinear systems with unknown time-varying delays, respectively; during the controller design procedure, the hyperbolic tangent functions and the FLS are combined to deal with the Hessian terms. Thus, the long-standing obstacle for stochastic systems control by the quadratic Lyapunov function is overcome. Nevertheless, up to now, to the author’s knowledge, the second moment approach is not extended to the other kinds of stochastic nonlinear systems.
In recent years, many results were concerned with the systems with linear parameterizations, such as references 16–18, and so on. However, it is well known that nonlinear parameterizations are inevitable in most realistic practical problems. Actually, designing the algorithms for nonlinearly parameterized systems is an interesting and meaningful problem. Many valuable results have been achieved for the nonlinearly parameterized systems with the nonlinearly parameterized functions f (x (t), ρ).11,19–22 However, it should be emphasized that in the existing results, the separation principle was introduced to deal with the functions which can be separated into two parts: the one part is unknown parameters and the other part is function without the nonlinearly parameterization problem. This design method is much complicated and the separated out parameters should be designed parameter adaptive laws, which can increase the computational burden greatly. Therefore, for the nonlinearly parameterized systems, if not using the separation principle, how to handle with the nonlinearly parameterized functions is worth studying. Furthermore, if the function f (x (t − d (t)), ρ) is with not only the nonlinearly parameterization problem but also the unknown state time-varying delay, how to handle with the function is a challenging problem.
Time-delay phenomena exist in many practical systems such as physical, biological, and economical systems. The existence of time delay is often a significant cause of instability and deteriorative performance, so the design and analysis of controllers for time-delay systems has received much attention. State delay and input delay are two kinds of the time-delay phenomena, and it is worth noting that the investigation for the nonlinear systems with state delay by using the FLS and NN has been received a lot of results, for example, references 10, 12, 23–26 and the references therein. The adaptive fuzzy tracking controllers were proposed for a class of stochastic nonlinear systems with state time-varying delays in references 10 and 12. In references 23 and 24, the authors studied the problem of adaptive fuzzy tracking control for a class of perturbed nonlinear systems with state time-varying delay and unknown dead zone and the problem of adaptive output tracking control for a class of nonlinear systems subject to unknown state time-varying delay and input saturation, respectively. For the systems with input delay, the investigation has received some results.11,27–31 In references 27–31, for the deterministic systems with input delay, the effective control schemes have been proposed, and in reference 11, an adaptive fuzzy tracking controller was developed for a class of stochastic nonlinearly parameterized systems with distributed constant input delay. However, the above literature are all about the time-invariant input delays, and for the systems with time-varying input delays, it is very difficult to design the controllers and analyze the stability of the closed-loop systems because of the existence of the derivatives of the time-varying input delays. Therefore, for the deterministic nonlinear systems or the stochastic nonlinear systems with the time-varying input delay u (t − τ (t)), how to design the controller is a worth studying subject.
Based on the above observations, in this paper, the problem of output tracking is revisited for stochastic strict feedback nonlinear systems with nonlinearly parameterized function f (x (t − d (t)), ρ) and time-varying input delay u (t − τ (t)) by using fuzzy control. The system will be transformed into a system without the time-varying input delay by using the state transformation with the integrator. Then, the appropriate Lyapunov–Krasovskii functionals are used to compensate the unknown time-varying delays terms, and the quadratic functions are used as Lyapunov functions to analyze the stability of systems and the hyperbolic tangent functions are introduced to deal with the Hessian terms. The nonlinearly parameterized functions will be lumped into the unknown continuous functions which can be approximated by using the FLS. Finally, the adaptive backstepping approach is utilized to construct the fuzzy controller. The three main advantages of the scheme are as follows: In this paper, the control theory of the stochastic nonlinear system is optimized. That is because the classical quadratic functions instead of the fourth moment approach often utilized in the most existing results are used as Lyapunov functions to analyze the stability of the stochastic nonlinear systems. The computational burden of the algorithm is reduced. Therefore, it is extremely convenient to the practical applications in engineering. The hyperbolic tangent functions are introduced to deal with the higher order Hessian terms. This is the attempt to deal with the control problem of stochastic nonlinear systems with the function f (x (t − d (t)), ρ). The appropriate Lyapunov–Krasovskii functionals are used to deal with the time-varying delays terms. The FLS are applied to approximate the unknown nonlinearly parameterized functions. This is unlike the results11,19–22 since the condition of function separation principle is reduced. In this paper, the number of the adjusted parameters only depends on the order of the investigated systems, which can reduce the computational burden greatly. Compared with the references 27–31, the existence of the time-varying input delay u (t − τ (t)) makes the controller design to become much more difficult. During the controller design procedure, the derivatives of the time-varying input delays are dealt with by using the appropriate assumptions, a state transformation through which the system with time-varying input delay is transformed into a system without input delay.
It can be proven that all the signals in the closed-loop system are bounded in probability and the tracking error can converge to a small residual set around the origin in the mean square sense. Simulation results are provided to show the effectiveness of the proposed approach.
Problem formulation and preliminaries
Problem formulation
Consider the following stochastic nonlinearly parameterized systems

Consider an n-dimensional stochastic system

Define a differential operator L as follows

In addition, the following assumptions and lemma are needed in this paper.
32
The desired trajectory vectors
32
0 ≤ d
i
(t) ≤ d and their derivatives satisfy
The time-varying input delay τ (t) should satisfy
The function m (t) satisfies
32
For 1 ≤ j ≤ n and ϑ
j
> 0, consider the set
Fuzzy logic systems
In this paper, the following rules are used to develop the adaptive fuzzy controller R
l
: if x1 is


Then, the fuzzy logic system (4) can be rewritten as

Our first choice for the membership function is the Gaussian function
33
Let

Controller design
In this section, we will use the recursive backstepping technique to develop the adaptive fuzzy tracking control laws as follows


The n-step adaptive fuzzy backstepping tracking control design is based on the following change of coordinates

It should be emphasized that for the stochastic nonlinear systems with the nonlinearity parameterized functions Now, we propose the following backstepping-based design procedure.
From (1) and (9), we yield that Using the triangular inequality and Assumption 2 gives that Combining (12) with (13) yields that








The unknown continuous function Then, choose the following Lyapunov candidate as Step i: Considering z
i
= x
i
− αi−1, where αi−1 defined in (8), then Choose the Lyapunov function candidate as From (23) and (24), we get Define Choose the Lyapunov function as Step n − 1: Considering zn−1 = xn−1 − αn−2, where αn−2 defined in (8), then Choose the Lyapunov function candidate as Combining (9), (36), and (37) yields that Moreover, if u (t) is a continuous function on the closed interval [t − τ (t), t], by using the integral mean value theorem, the triangular inequality, and Assumption 3, we can obtain Step n: Considering Similar to Step i, choose the Lyapunov function candidate as Similar to Step i, we can have Define


































The main technical obstacle in the design for stochastic systems is that the It
Stability analysis
For stochastic nonlinear system (1), under Assumptions 1–4, the controller (8) and the parameter adaptive law (9) guarantee that all the signals in the closed-loop system is semi-globally uniformly ultimately bounded in probability. Moreover, the tracking error in probability may be made arbitrarily small by appropriately adjusting the design parameters.
From (45), it can be seen that boundedness of the residual term
Now, we assume that for j = 1, …, n, ϑ
j
= ϑ, where ϑ > 0 is an arbitrary small constant. Then, in Lemma 1, the mentioned set If If Finally, let In the following, we will prove that all the other signals in the closed-loop system are bounded, and the proof process is divided into the following three cases.





For 1 ≤ j ≤ n − 1, z
j
∉Θ
ϑ
. In this case, Note that C is bounded; therefore, based on the conclusion of reference 16 and (64), we can get that z
j
and Furthermore, based on (64) and Dynkin’s formula,
38
we have





For Furthermore, we have

Some z
m
∈ Θ
ϑ
, while some z
j
∉Θ
ϑ
with m, j = 1, 2, …, n − 1. Define Σ
M
and Σ
J
as the index sets of subsystems consisting of z
m
∈ Θ
ϑ
and z
j
∉Θ
ϑ
, respectively. Then, for j ∈ Σ
J
, choose the Lyapunov function candidate as Based on the above discussion, (68) can be rewritten as Further, since for j = 1, 2, …, n − 2, Similar to Case 1, it can be shown that z
j
, For m ∈ Σ
M
, we know that z
m
are bounded. Similar to Case 2, by combining with the conclusions of j ∈ Σ
J
, we can obtain that the variables x
m
, Furthermore, for m ∈ Σ
M
, we can get Finally, from Cases 1–3, we can conclude that This concludes the proof.










From (75), one yields that the error signals z1, z2, …, z
n
are all bounded in probability. Moreover, according to (75), the tracking error in probability may be made arbitrarily small by appropriately adjusting the design parameters η, σ
i
, ϑ, and k
i
. Theoretically, σ
i
should be chosen smaller while the positive constants η, ϑ, k
i
should be chosen appropriately. However, how to choose the optimal parameters to get the optimal tracking performance is still an open problem. In the simulation, the design parameters are set using a trial-and-error method.
In references 36 and 37, the authors studied the fuzzy adaptive practical tracking problem for a class of nonlinear pure feedback systems with quantized input signal and addressed the adaptive neural tracking control problem for a class of uncertain stochastic nonlinear systems with non-strict feedback form and prespecified tracking accuracy, respectively. In references 36 and 37, to analyze the convergence of the tracking error using all Barbalat’s Lemma via some nonnegative functions rather than the positive-definite Lyapunov funtions, hence, the issue has been overcome that the tracking error cannot converge to an accuracy assigned a priori. For more detailed proofs, refer in the literature 37 and 38.
Simulation
Example 1: To show the feasibility of the developed scheme, the simulation example is given in the following. The developed adaptive fuzzy controllers are applied to the following stochastic nonlinear system with time-varying input delay For the stochastic nonlinearly parameterized system (76), authors make many simulation results by choosing different random seeds ω; all of them show that the signals in the closed-loop system are bounded and the system output y follows the reference signal y
d
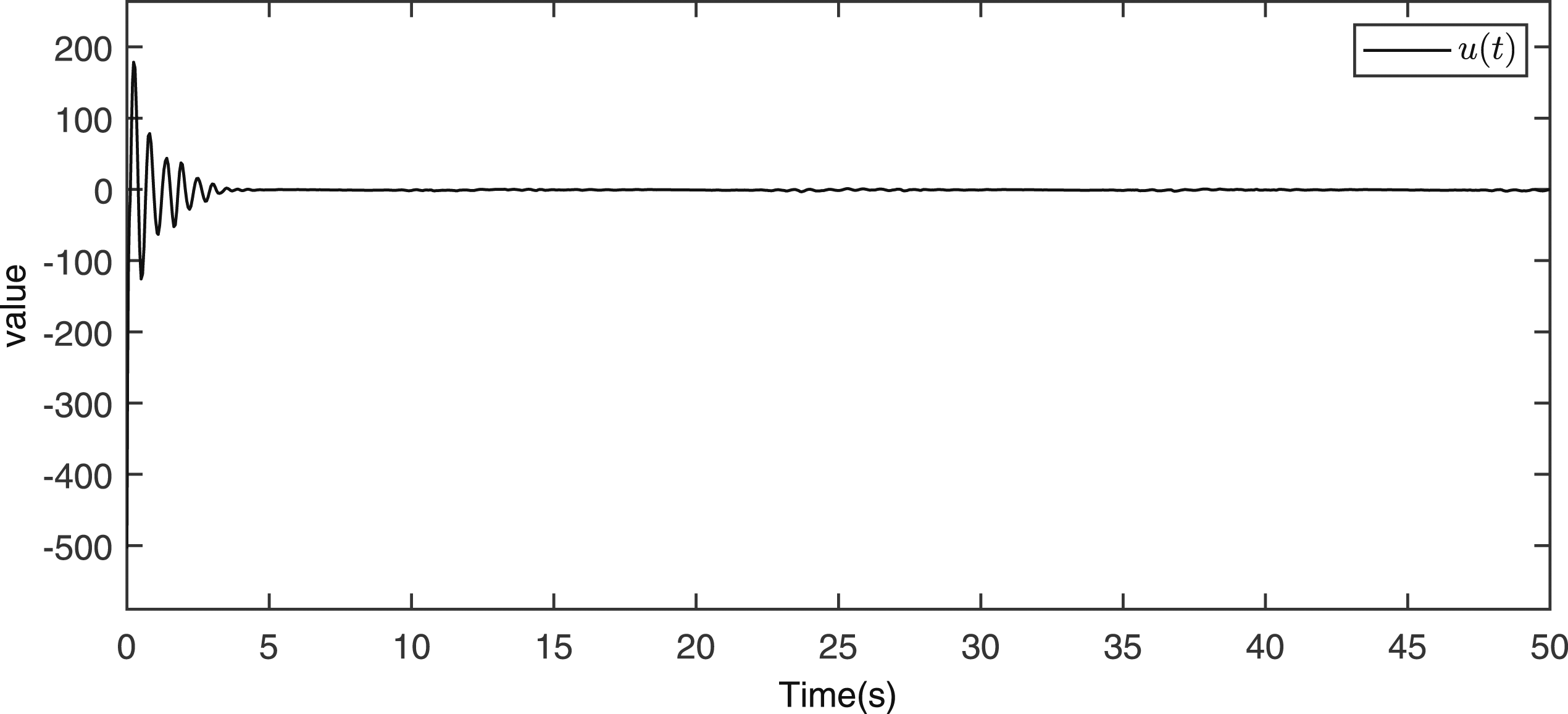
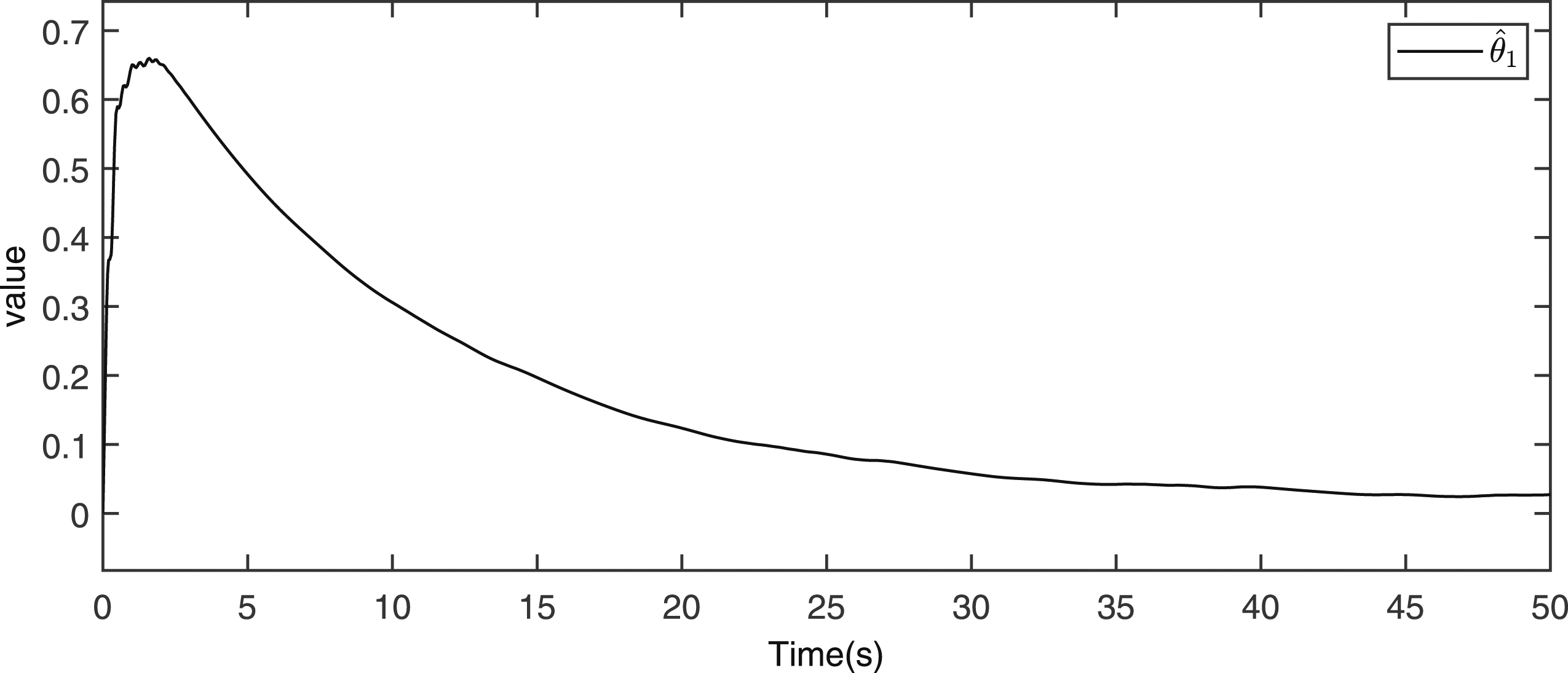
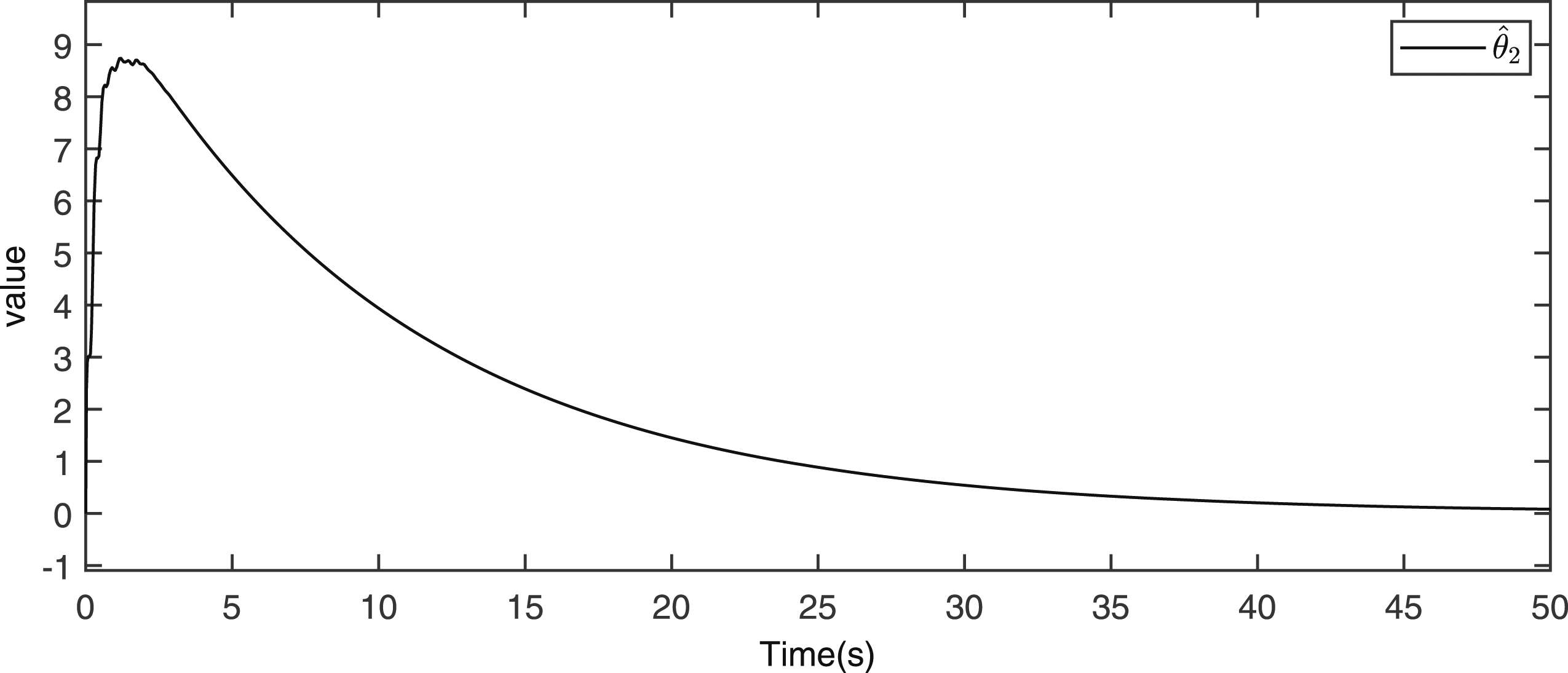
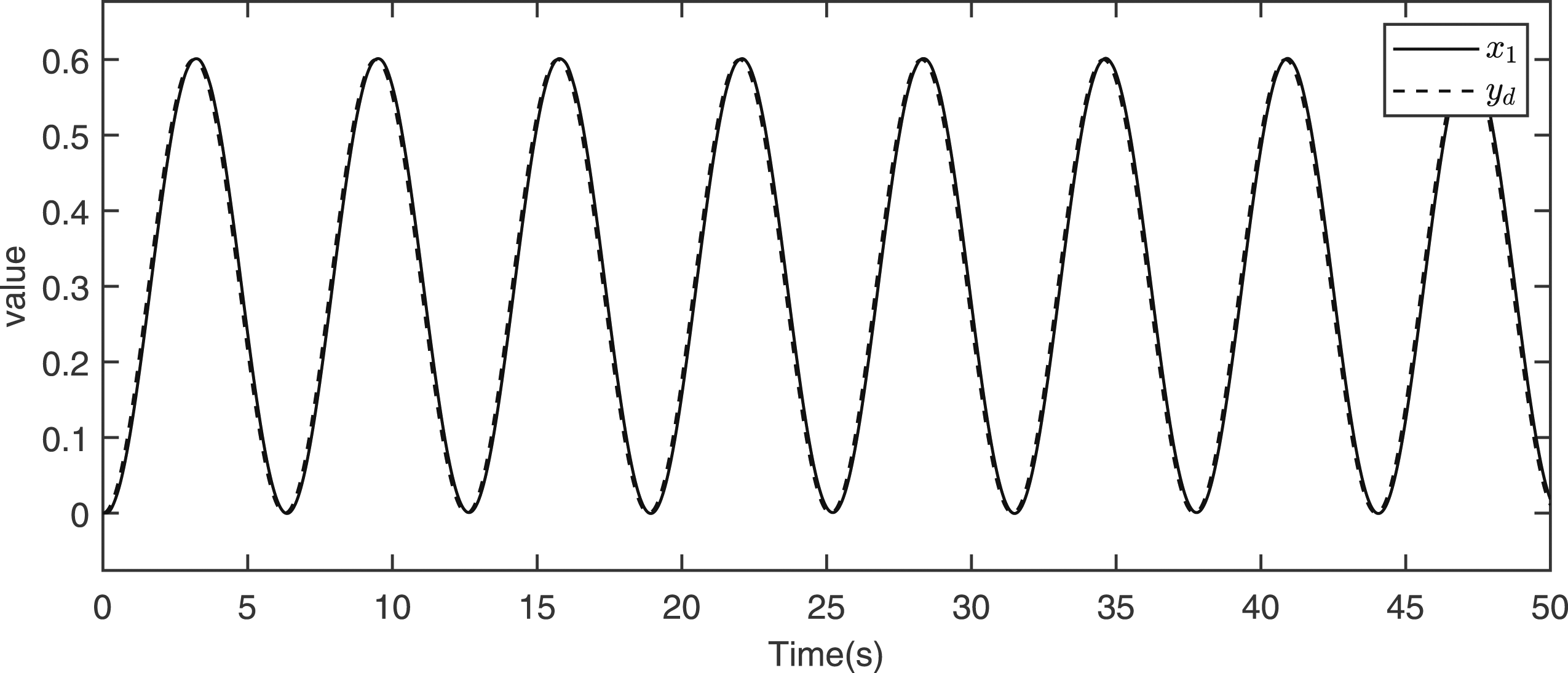
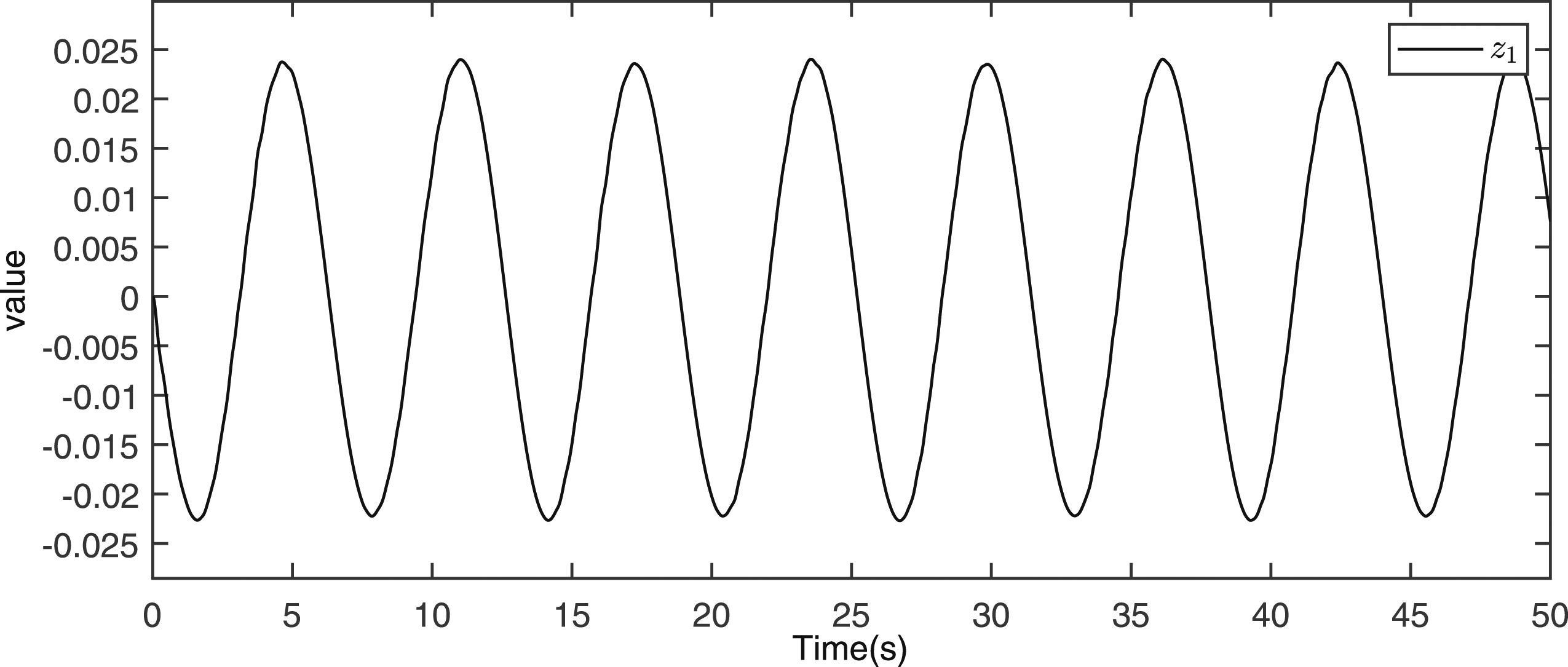
to a small neighborhood of zero. In this paper, one case of them is listed and shown in Figures 1–6. From Figure 1 and Figure 2, it can be seen that good tracking performance is obtained. The boundedness of u and x2 are illustrated in Figures 3 and 4, respectively. The adaptive parameters



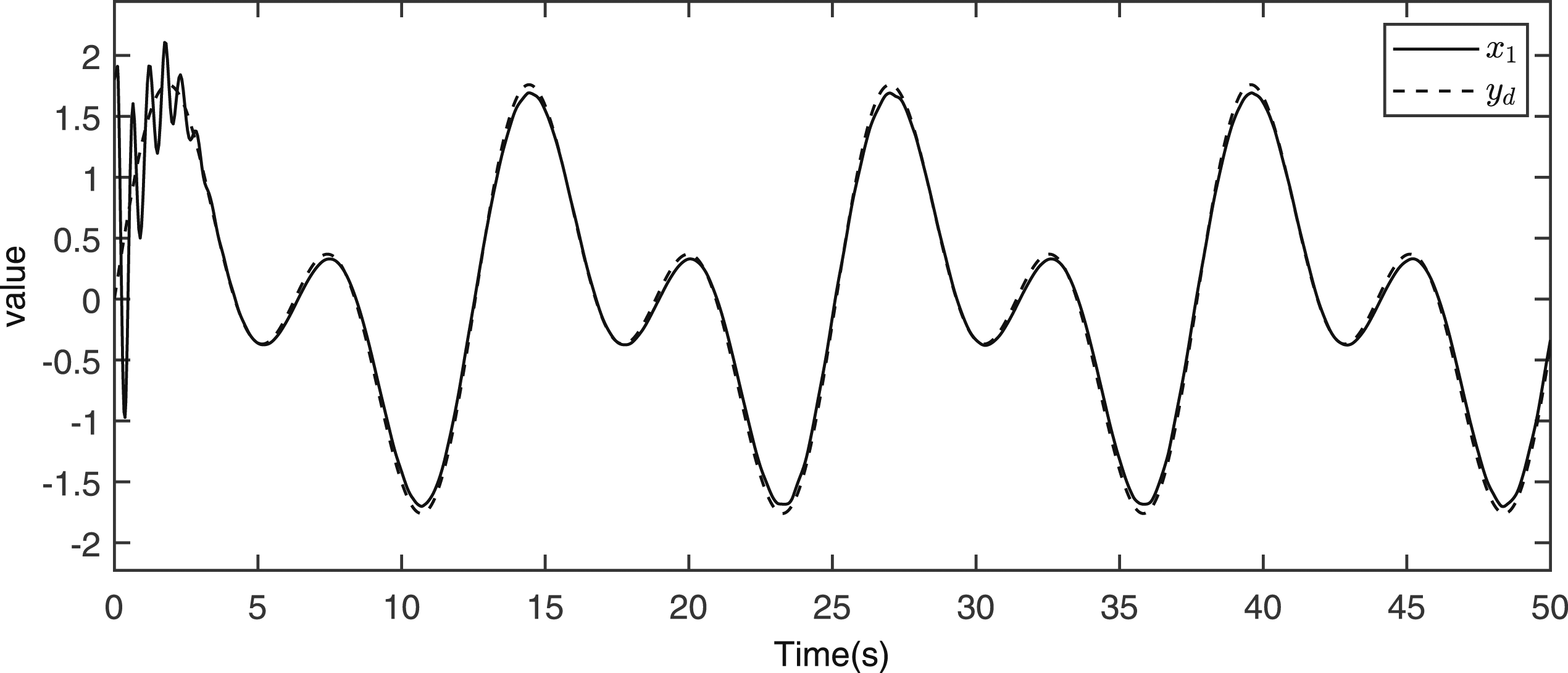
x1 (solid line) and y d (dashed line) (Example 1).
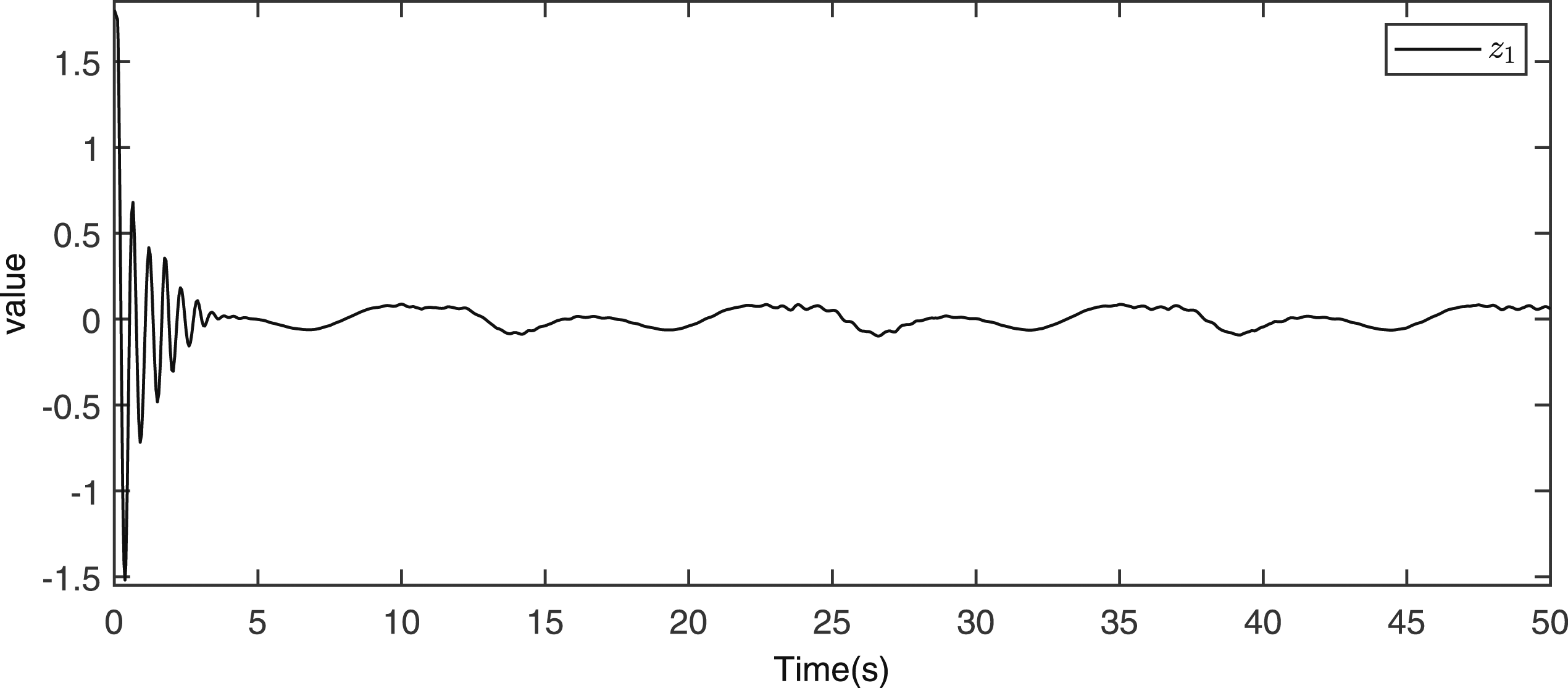
The tracking error
The trajectory of
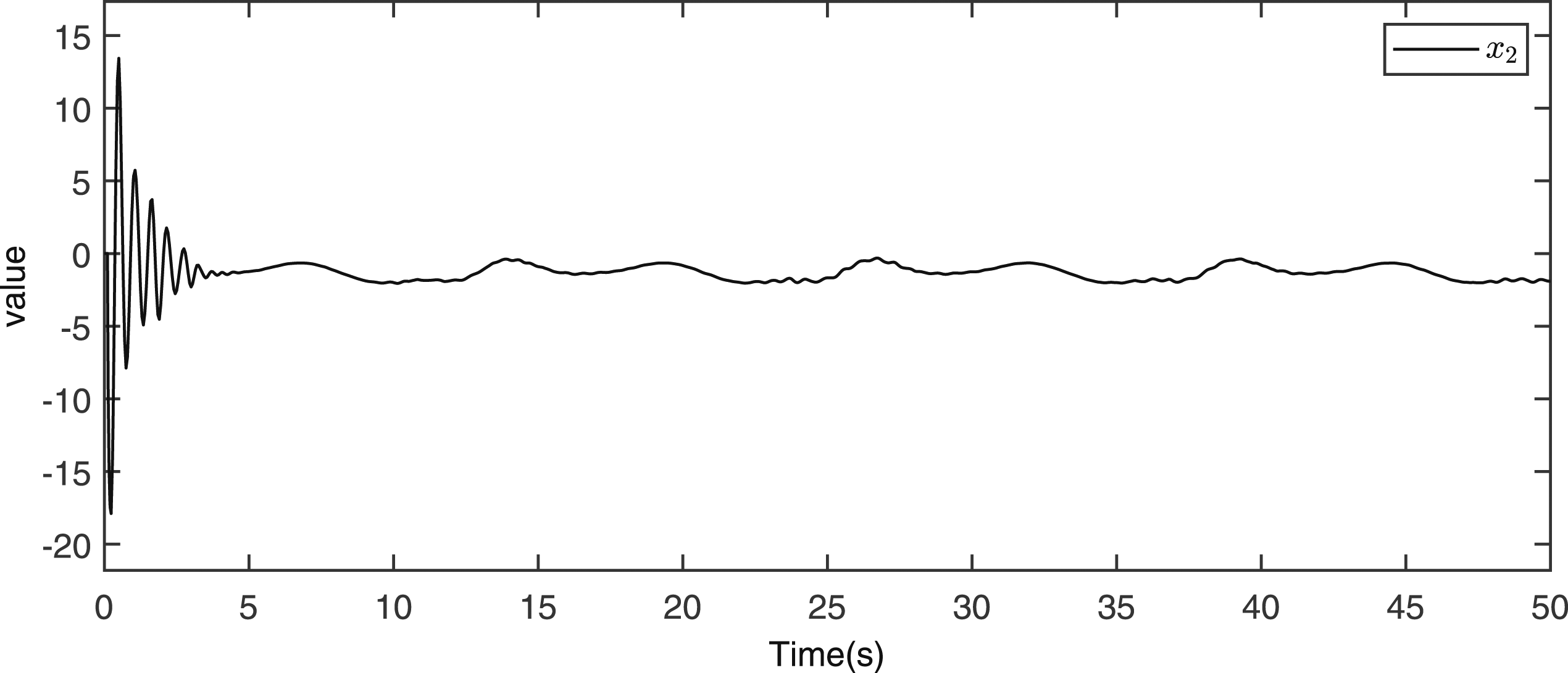
The state
The trajectory of
The trajectory of
Example 2
38
: Consider a one-link manipulator with the dynamic equation as follows The simulation objective is to apply the developed adaptive fuzzy controller such that the boundedness of all the signals in the closed-loop system is guaranteed and the system output y follows the reference signal y
d
to a small neighborhood of zero with y
d
= 0.3 (1 − cos (t)). The controller parameters are η = 0.2, σ1 = σ2 = 0.9, k1 = 15, k2 = 28, and k3 = 60. The simulation results are presented by Figures 7–12. From Figures 7 and 8, it can be seen that good tracking performance is obtained. The boundedness of u, x2, and x3 are illustrated in Figures 9 and 10, respectively. The adaptive parameters


x1 (solid line) and y d (dashed line) (Example 2).
The tracking error
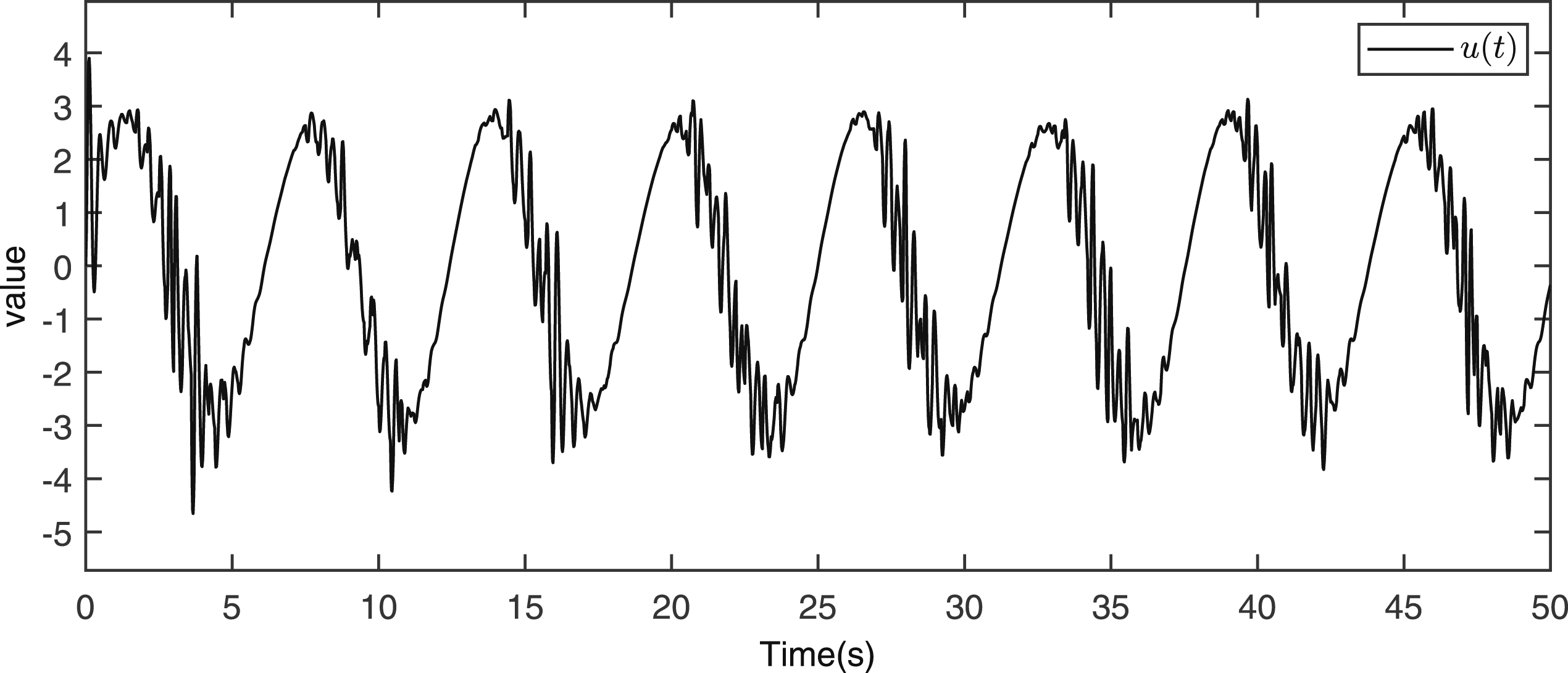
The trajectory of
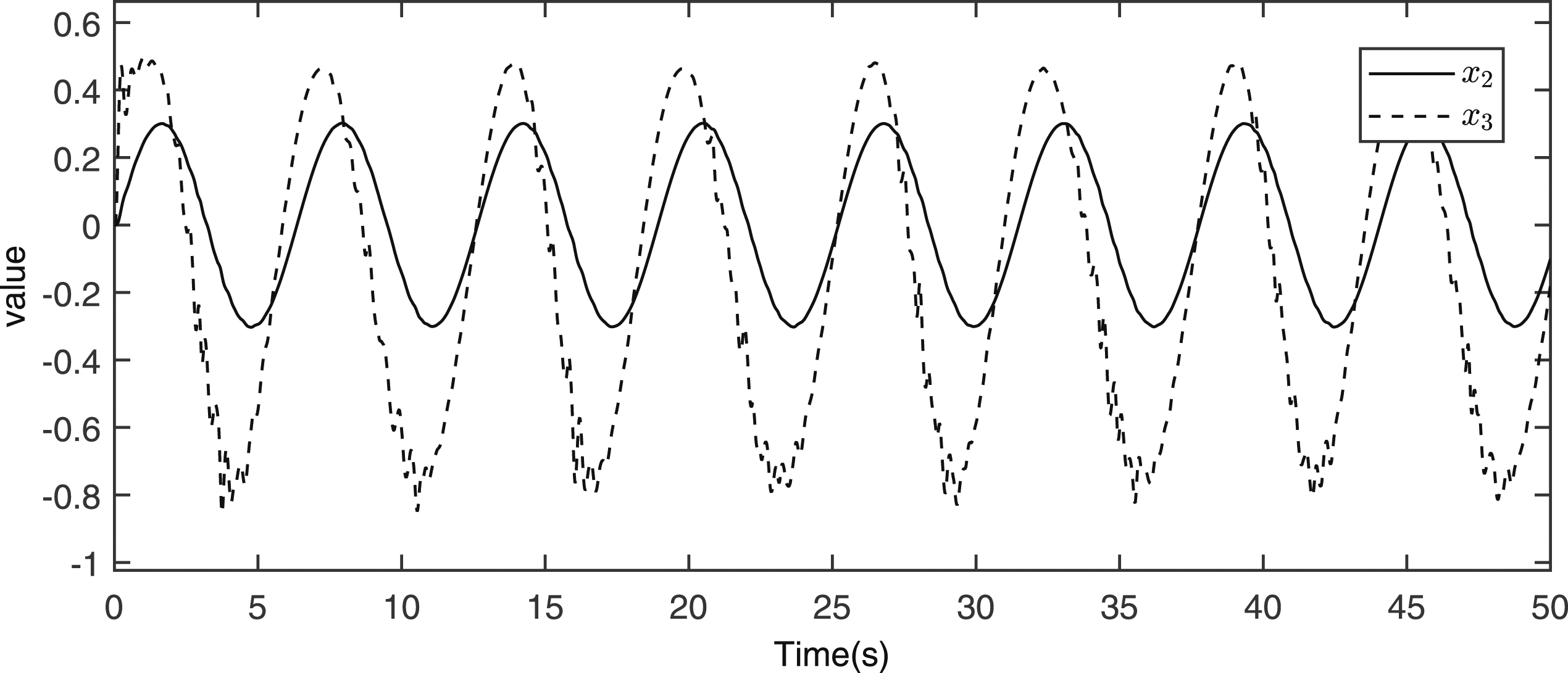
The state x2 (solid line) and x3 (dashed line) (Example 2).
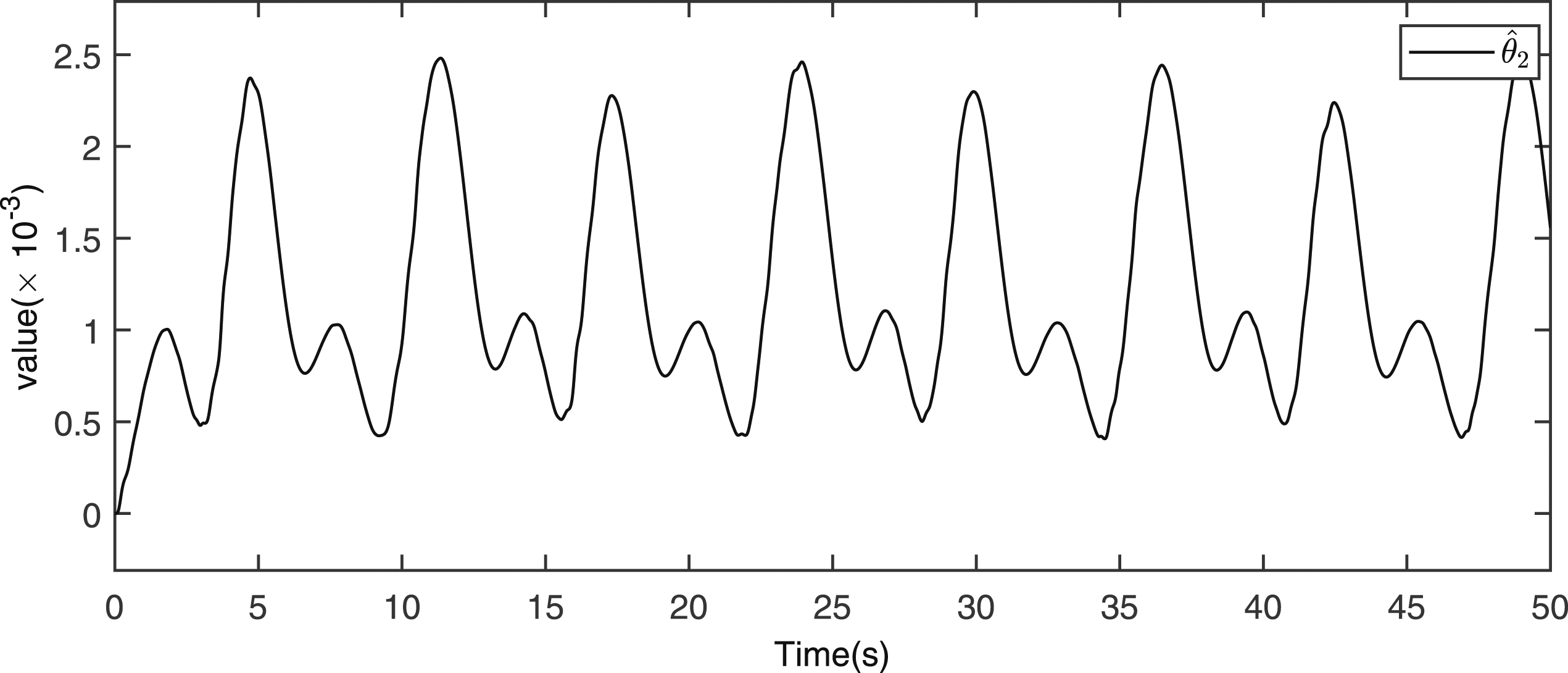
The trajectory of
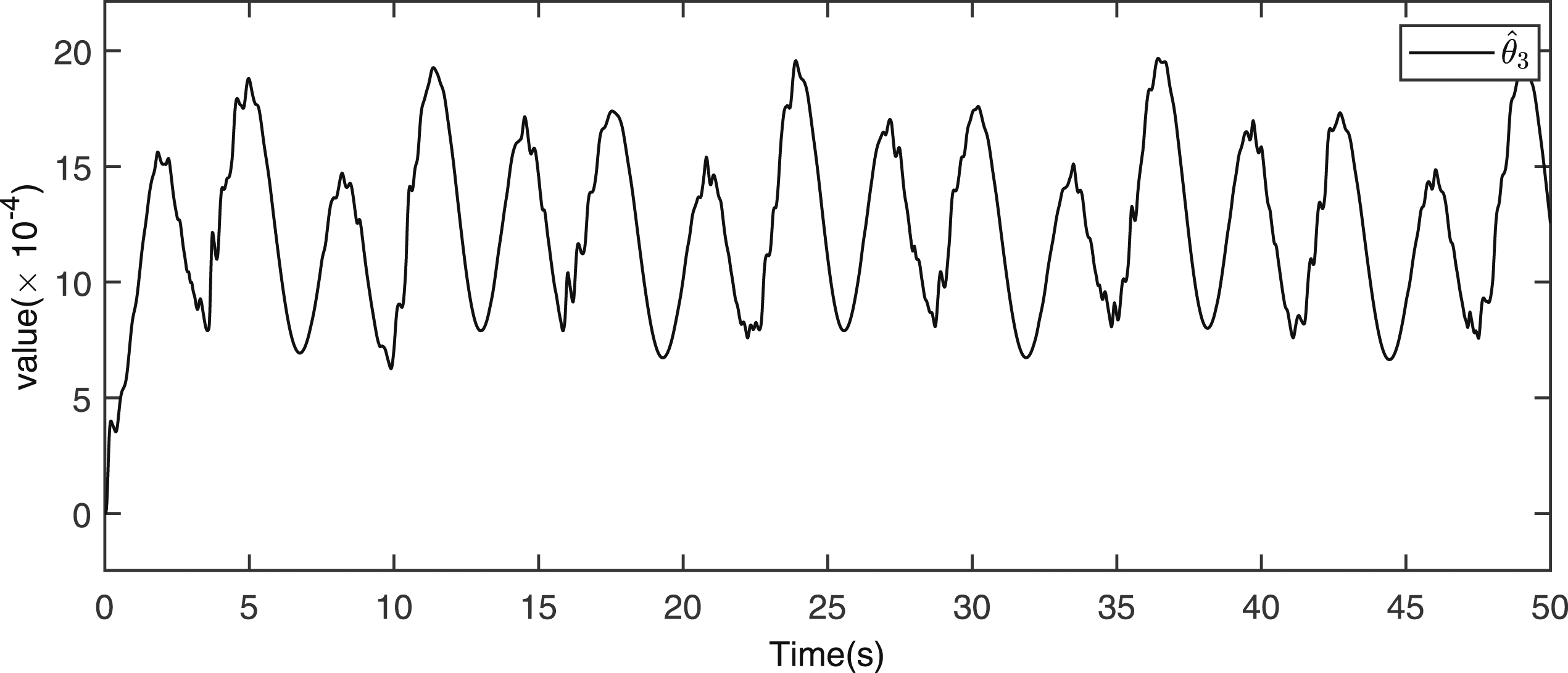
The trajectory of
Figures 1–12 shows that for the proposed control design scheme is effective, the output can track the desired signal successfully and all the other signals in the closed-loop system are bounded in probability. Moreover, unlike the most existing results13, 14,15 in which the fourth moment approach is used as Lyapunov functions to analyze the stability of the stochastic nonlinear systems, in this paper, the use of the classical quadratic functions optimizes the control theory of the stochastic nonlinear systems.
Conclusion
In this paper, the problem of adaptive fuzzy tracking control has been addressed for a class of stochastic nonlinearly parameterized systems with time-varying input delay. Without using the parameter separation principle, the adaptive fuzzy controller has been constructed by combining the backstepping approach. The proposed controller ensures that all the signals of the resulting closed-loop system are bounded in probability, and the tracking error converges to a small neighborhood of the origin in the mean square sense. However, under the proposed controller, the number of adjustable parameter depends on the order of the system; thus, by combining the classical quadratic Lyapunov functions, how to design the controller containing less adoption parameters to reduce the computation burden is very significant. In the future, the stochastic nonlinear with distributed time-varying input delays will be considered, of course, how to design the effective tracking controller is a challenging problem.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The project is supported by the Special Fund of the National Natural Science Foundation of China (11626183, 12001418), the Postdoctoral Science Foundation of China (2018M633476), Shaanxi Province Natural Science Fund of China (2020JM-490), the Youth Talent Promotion Program of Shaanxi Association for Science and Technology (20180505), the Scientific Research Plan Projects of Shaanxi Education Department (19JK0466), and the Science Foundation of Xian University of Architecture and Technology (ZR18037).