
Abstract
A novel hybrid strategy combining a spiral dynamic algorithm (SDA) and a bacterial foraging algorithm (BFA) is presented in this article. A spiral model is incorporated into the chemotaxis of the BFA algorithm to enhance the capability of exploration and exploitation phases of both SDA and BFA with the aim to improve the fitness accuracy for the SDA and the convergence speed as well as the fitness accuracy for BFA. The proposed algorithm is tested with the Congress on Evolutionary Computation 2013 (CEC2013) benchmark functions, and its performance in terms of accuracy is compared with its predecessor algorithms. Consequently, for solving a complex engineering problem, the proposed algorithm is employed to obtain and optimise the fuzzy logic control parameters for the hub angle tracking of a flexible manipulator system. Analysis of the performance test with the benchmark functions shows that the proposed algorithm outperforms its predecessor algorithms with significant improvements and has a competitive performance compared to other well-known algorithms. In the context of solving a real-world problem, it is shown that the proposed algorithm achieves a faster convergence speed and a more accurate solution. Moreover, the time-domain response of the hub angle shows that the controller optimised by the proposed algorithm tracks the desired system response very well.
Keywords
Introduction
Flexible manipulator systems are commonly found in industrial applications and space robotics. Compared to their rigid body counterparts, flexible manipulators offer several advantages. These include being light-in-weight, having low inertia and energy consumption, high-speed operation, increased productivity, and safer to handle. However, due to the flexible dynamics, distributed parameters and nonlinear nature of the system, dynamic modelling, and controller design of a flexible manipulator are challenging tasks. In the past, numerous conventional control schemes for flexible manipulator systems have been reported. 1 However, the conventional approaches require an accurate mathematical model to represent the dynamic characteristics of the flexible system, which is hard to acquire. Moreover, with the presence of uncertainties, which is normal for a real system, some of the physical parameters of the system are unavailable, and several assumptions have to be made during the dynamic modelling process. A promising control scheme for solving a complex and highly nonlinear system with uncertainty can be implemented through an intelligent control approach. These include fuzzy logic control (FLC),2,3 neural network control4–6 and hybrid proportional-derivative FLC.7,8
The main advantage of an intelligent-based control over a conventional-based control is that it does not require an accurate mathematical model of the system. Intelligent-based control can handle nonlinear and complex problems more efficiently. In recent trends, intelligent-based control is commonly applied to solve real-world problems with a certain degree of uncertainty. In the case of FLC, the control scheme can be designed based on human expert knowledge of the system under control. However, for a highly complex system, expert knowledge of the system might be limited. This leads to the application of a trial and error method for determining fuzzy linguistic rules, membership functions, and input–output gains, which is difficult to apply. Consequently, it results in poor control performance. As a solution to the problem, a metaheuristic algorithm is applied to automatically seek an optimal fuzzy structure and parameters for the best system performance. With the current advances in processing and computing facilities, researchers are more attracted to apply the algorithm to find an optimal solution to such a problem.
Many researchers have reported the successful application of metaheuristic algorithms in optimisation of FLC-based control. Anh and Ahn (2011) 9 applied a modified GA to optimise an inverse nonlinear autoregressive network with exogenous inputs (NARX) fuzzy model to control a pneumatic artificial muscle robot arm. They compared the proposed algorithm with the original genetic algorithm (GA). The result showed that the original GA had an accuracy problem due to landing on local optima. Mandal et al. (2015) 10 compared the performances of the Bacterial Foraging Algorithm (BFA) and GA in the optimisation of real-time fuzzy-feedforward control for an electrohydraulic system with discontinuous nonlinearities. It was found that BFA outperformed GA and the designed controller was more robust than the original controller. Banerjee et al. (2011) 11 conducted a study comparing the performances of BFA and particle swarm optimization (PSO) in optimising a FLC for level control of a surge tank. It was found that BFA outperformed the PSO by resulting in a lower cost function value and more accurate result. Roy et al. (2010) 12 compared the performances of various evolutionary algorithms in optimising a hybrid FLC for automatic control of thermal generating plants. The study concluded that modified chaotic ant swarm optimization and BFA outperformed six categories of other optimisation algorithms including GA and PSO, in terms of accuracy and controller performance. Both algorithms were found to be more robust than other methods where they gave more consistent results when tested with 200 runs.
The literature review in the aforementioned paragraph indicates that BFA is a promising optimisation algorithm and has a competitive performance in solving various real-world problems. It is a well-known biological-inspired algorithm, which was introduced in 2002. 13 Many researchers have pointed out that the constant step size C in the chemotaxis phase of BFA limits the performance of the BFA. Employing the approach, the convergence speed and final accuracy of the BFA cannot be achieved at the same time or they are in contradiction with each other. Defining a large C for the bacteria will result in faster convergence speed but low accuracy. On the contrary, by using a small C, a more accurate solution will be obtained but at a slow convergence speed since the bacteria need more steps to reach the optimum location hence increasing the total computation time to complete the process.
Various adaptive and hybrid strategies combining BFA and other metaheuristic algorithms with the aim to improve the performance of the original algorithms have been proposed by researchers. 14 A hybrid approach may add extra complexity to the structure of the original algorithms. However, combining the advantages and unique features of the predecessor algorithms can possibly result in faster convergence and higher accuracy. Mishra (2005) 15 combined BFA and a conventional least square algorithm to estimate the harmonic components in a power system current waveform. Both the BFA and least square were used to estimate the phase and amplitude of the harmonic, respectively. Kim and Cho (2007) 16 hybridised BFA and GA and applied the resulting algorithm to optimise the controller parameters for an automatic voltage regulator. A hybrid strategy combining artificial immune system (AIS) and BFA was proposed. 17 The clonal selection scheme was incorporated into bacteria chemotaxis to vary the bacteria step size and the algorithm was successfully applied to optimise the controller parameters of a three-phase induction motor. Biswas et al. (2007) 18 proposed a hybrid BFA and PSO, where the PSO-based mutation scheme was combined with bacteria chemotaxis. Panigrahi and Pandi (2008) 19 incorporated the Nelder-mead algorithm into BFA to improve the exploration strategy of bacteria within the search area.
Apart from BFA, another promising metaheuristic algorithm that is gaining attention from researchers worldwide is Spiral Dynamic Algorithm (SDA). It is an optimisation algorithm in which the strategy has been developed based on natural spiral phenomena. 20 One of the advantages of SDA is that it has a relatively simple structure hence it needs less computation time to complete the whole cycle of the search operation. However, there is a possibility for the algorithm to get trapped in local optima especially in the case of a more complex function with a high number of dimensions. This might occur possibly due to insufficient exploration process, or unbalanced exploration and exploitation of the search space. Another possibility is due to its deterministic strategy that relies only on the spiral model. During the diversification phase, all the agents move deterministically toward the centre of a spiral form. It guides the agents to move in a more limited area rather than being distributed thoroughly within the search space. For a function that has an uneven surface area and multiple global optimum points, the strategy may cause the agents to be trapped in a local optimum solution.
Review of existing hybrid BFA-SDA methods.
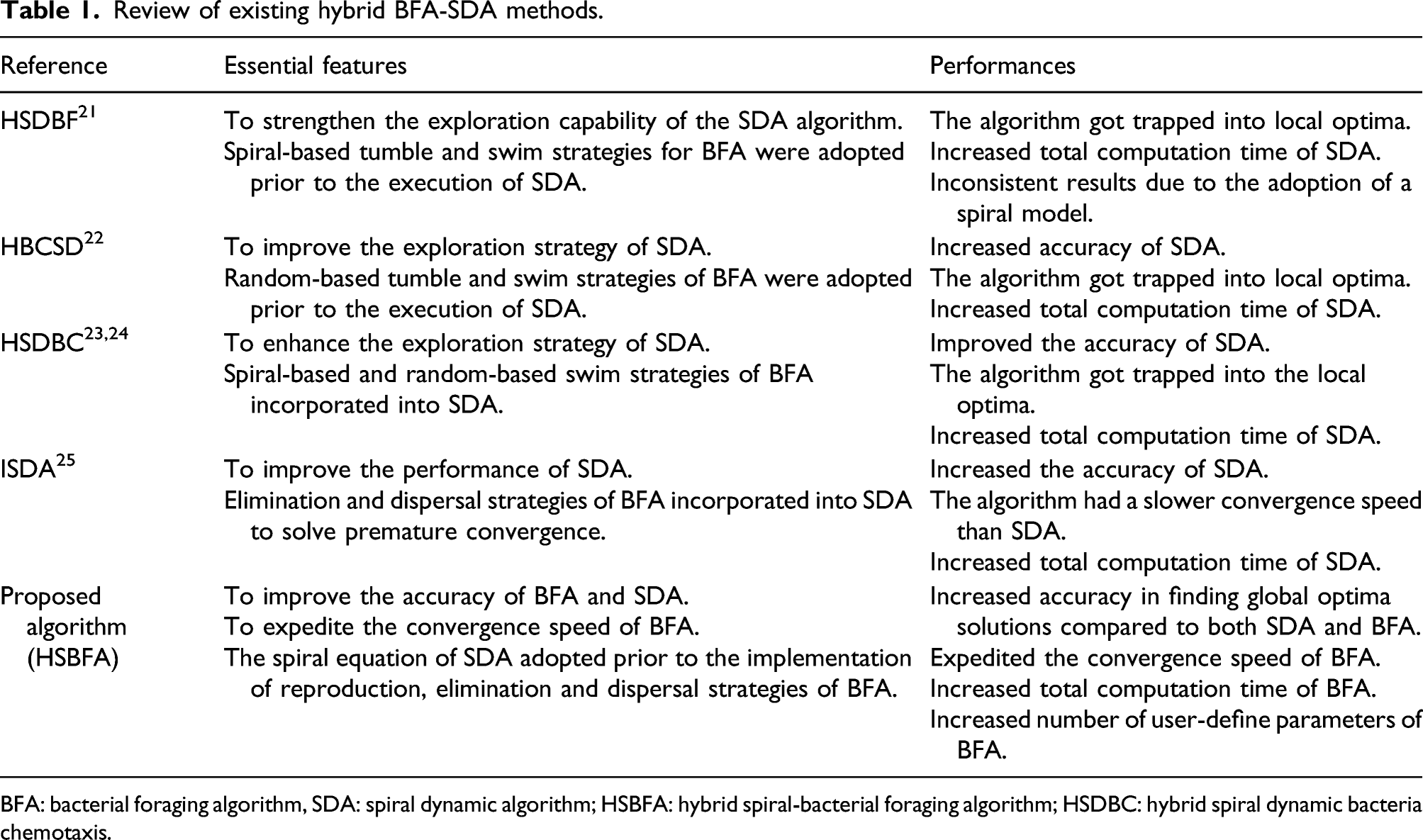
BFA: bacterial foraging algorithm, SDA: spiral dynamic algorithm; HSBFA: hybrid spiral-bacterial foraging algorithm; HSDBC: hybrid spiral dynamic bacteria chemotaxis.
This article is based on preliminary work of the authors,
26
published in a conference where a spiral equation adopted from the SDA is incorporated into the chemotaxis phase of the BFA. The algorithm was applied to acquire a parametric model of a flexible manipulator system. This article is different from Ref. 26 such that it presents a comprehensive study and analysis on the accuracy performance of the algorithm tested on state-of-the-art CEC2013 benchmark functions. A statistical analysis based on Friedman and Wilcoxon Sign Rank tests is performed and compared with SDA, BFA, hybrid spiral dynamic bacteria chemotaxis (HSDBC),23,24 and Pattern Search (PS)
27
algorithms. It also presents an application of the algorithm to optimise a nonlinear hybrid Proportional-Derivative-like Fuzzy Logic Controller (PD-like FLC) for an input tracking problem of a flexible manipulator system. The tracking performance result of the optimised controllers is analysed and compared with SDA, BFA, and HSDBC algorithms. The proposed algorithm is referred to as the hybrid spiral-bacterial foraging algorithm (HSBFA). The development of the proposed algorithm is motivated by the following issues: 1. SDA has fast computation time and convergence speed, but it is low in accuracy. 2. BFA has good accuracy, but it has a long computation time and slow convergence speed. 3. The convergence speed and accuracy are the most important criteria for an optimization algorithm in solving any real-engineering problem.
The aim of this article is first to propose an improved version of a hybrid SDA-BFA algorithm which can improve the accuracy performance of SDA and BFA algorithms and to improve the convergence speed of BFA. The proposed algorithm is then tested with CEC2013 benchmark functions to show its effectiveness in obtaining near-global optimal solutions in comparison to SDA, BFA, HSDBC, and PS algorithms. The second aim is to show its effectiveness in a PD-like FLC control design of a flexible manipulator system. Considering no expert knowledge is present, the approach allows automatic and optimal attainment of linguistic rules for the FLC and their corresponding fuzzy weight parameters, and fuzzy input-output gains for the best tracking performance. The rest of the article is organised as follows. The proposed HSBFA is described in the Hybrid Spiral-Bacterial Foraging Algorithm section while the analysis on its accuracy performance tested on CEC2013 benchmark functions is presented in the Performance Test on CEC2013 Benchmark Functions section. The application of the proposed HSBFA algorithm to optimise the hybrid PD-like FLC for the flexible manipulator system is presented in the PD-Like FLC Optimisation for Flexible Manipulator section. Finally, the conclusions drawn from the work are presented in the Conclusion section.
Hybrid spiral-bacterial foraging algorithm
The proposed hybrid spiral-bacterial foraging algorithm (HSBFA) is developed based on the original SDA and BFA. A detailed explanation of the proposed HSBFA is presented in this section. In the proposed HSBFA, the three essential phases such as chemotaxis, reproduction, and elimination-dispersal of BFA are retained. The only change is that the spiral model of SDA is incorporated into the chemotaxis phase to improve the position of bacteria. The main objective of combining the spiral feature into the BFA structure is to have a balance between exploration and exploitation phases such that faster convergence and better accuracy are achieved. This modification can help the BFA in several aspects, and these can be described as follows.
First, the original strategy of BFA is based on the random movement of individual bacterium around its local position that happens in the chemotaxis phase. However, the interaction of the best bacterium and other bacteria in that particular iteration does not occur. Some of the bacteria tend to search in locations away from the global optimum location and may result in slow convergence. In SDA, the spiral centre is always considered as a point with the best fitness in the current iteration. Since the motion of the search point is towards the spiral centre, in general, the movement of search points is always guided by the best optimum location in that particular iteration. Incorporating the spiral model can guide the bacteria movement towards the global best bacterium position in the current iteration. This lets all other bacteria search possible optimum location nearer to the global best solution and consequently, it speeds up the algorithm’s convergence.
Second, employing a spiral model, bacteria are guided to move in a spiral way, and the spiral trajectory is determined by a user-defined spiral angle and radius. Therefore, instead of using the solely random approach in determining the bacteria motion, by employing the spiral model, the bacteria movement is enhanced through a combination of random and deterministic approaches. The deterministic approach always guides the bacteria towards the best bacterium while the stochastic approach moves the bacteria in a random direction.
Third, the exploration and exploitation of the BFA can be enhanced through diversification and intensification of the spiral approach. By employing the spiral strategy, the bacteria tend to move diversely throughout the search area and move intensely in a more confined space at the initial and final stages, respectively, while at the same time the random strategy is applied where it can move the bacteria freely throughout the search area during the whole search operation.
Fourth, in the original BFA strategy, the bacteria step size is constant where it prevents the simultaneous achievement of faster convergence and high accuracy. Applying the spiral model, a combination of constant step size and dynamic step size is incorporated. The bacteria move with a large step at the early stage of the search operation and the step size is reduced as the bacteria approach the final phase of the search operation. When the bacteria are far from the global optimum location, they move faster with a large step size but they move slower with a smaller step size when they approach the global optimum location. Hence, faster convergence and a highly accurate solution can be achieved even if the global optimum solution is located at a remote location. By having an adaptive step size in the algorithm, the oscillation problem near the optimum location can be resolved, and a more stable convergence can be achieved.
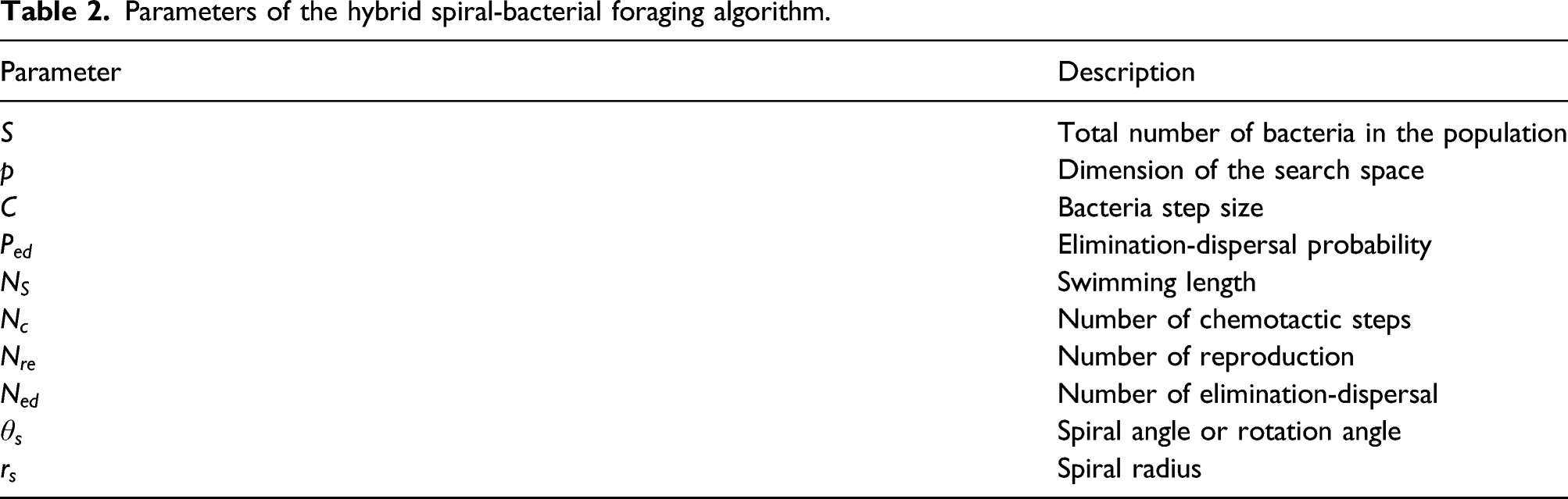
Parameters of the hybrid spiral-bacterial foraging algorithm.
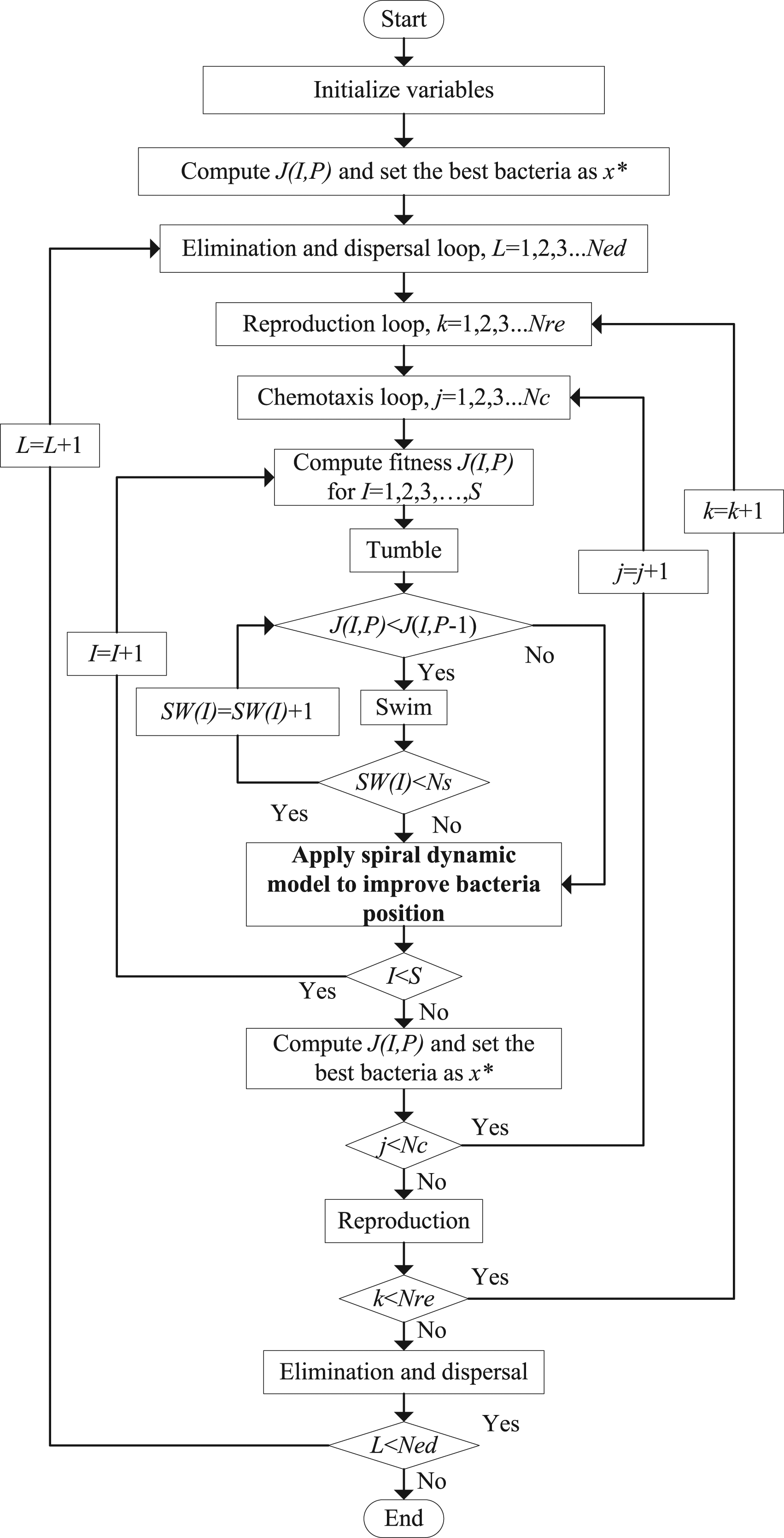
Flowchart of the proposed hybrid spiral-bacterial foraging algorithm.
In general, the fitness of each bacterium is obtained after the initialisation step to determine the best bacterium. A bacterium is considered the best bacterium if it has the highest fitness or the lowest value of cost function. Then, the best bacterium is defined as x*, which is a centre point of the spiral motion. Unlike the standard BFA and other hybrid BFA-SDA variants, at this stage, HSBFA memorises the current best location of a bacterium, x*, in the whole bacteria population. The chemotaxis phase consists of the tumble and swims actions. Before that, the algorithm saves the location and fitness value of each bacterium in the population. In the tumble, each bacterium randomly moves linearly one step ahead around its current location to search for another better solution. The fitness value at a new location after the tumble for each bacterium is saved before a swim action is executed.
In the swim action, the bacterium will move linearly several steps ahead in the same direction, which is similar to tumble action, if it has a better fitness value than the previous location. The bacterium will swim until it reaches the maximum value of swim Q
s
, defined at the initialization stage. The bacterium movement for the tumble and swim actions is based on the constant step size, C, defined at the initialization stage. After completing the tumble and swim actions, each bacterium is spirally directed towards the global best position by utilizing a spiral equation adopted from the SDA algorithm as highlighted in the flowchart. The position update equation generating the spiral trajectory is presented as equation (1)
This is to guide the movement of the whole bacteria population based on the best bacterium, x*, which finally brings the bacteria to the global best location in the search space. Apart from that, by applying the spiral equation, the bacteria step size will be varied throughout the search process. The distance between the two points is larger at the outer layers and it is closer at the inner layers of the spiral form. This strategy complements the drawback of using constant bacteria step size in the standard BFA. Each bacterium moves with a larger step size at the early stage of the search operation and moves with a smaller step size as the number of iterations increases. Thus, the bacteria can reach all possible solutions at any remote location within the search space. More importantly, by implementing this approach, a balanced exploration and exploitation strategy can be achieved and it will result in better convergence speed with higher accuracy.
Next, the finesses of each bacterium are evaluated again to determine the best bacterium in the current iteration before starting a new reproduction phase. The best bacterium is assigned as x* and will be used in the next chemotaxis phase. All these steps are continuously repeated until the algorithm is terminated. By using the proposed approach, the bacteria are guided based on the local best position found by each bacterium through the random approach of the chemotactic strategy as well as the global best position in the spiral dynamic model. Moreover, the step size of the bacteria is varied based on their distance from the global optima location through the spiral model.
Performance test on CEC2013 benchmark functions
In this section, a set of benchmark functions with 10 and 30 dimensions are used to assess the performance of the proposed algorithm in finding a near-global optimum solution. A performance comparison between the proposed algorithm and the original SDA, BFA, HSDBC, 24 and PS algorithms 27 is conducted. In particular, a set of benchmark functions from the 2013 IEEE Congress on Evolutionary Computation 28 is used. These benchmark functions have 28 different functions with various properties, landscapes, and complex features.
In order to get a fair comparison, the parameters of the proposed hybrid algorithm and the original SDA, BFA, HSDBC, and PS algorithms are chosen after conducting exhaustive trial and error experiments such that the best performance is obtained. The initial BFA parameters were set based on the value proposed in Refs. 13 and 14 while for HSDBC and SDA, they were set based on the best value from previously conducted experiments. 24 The number of bacteria swims, chemotactic, reproduction, elimination, and dispersal for BFA and HSBFA and the number of iterations for HSDBC and SDA were set just enough to meet the maximum number of evaluations as required for the CEC2013 benchmark functions test. The parameter value of the bacteria step length for BFA, spiral radius, and spiral angle for SDA, HSDBC, and HSBFA were then stochastically fine-tuned to meet the optimal performance. The parameters for HSDBC were the same as SDA except for the two additional parameters defined for a chemotactic strategy, which were initially set based on Refs. 13 and 14 before they were fine-tuned.
User-defined parameters of the algorithms.

SDA: spiral dynamic algorithm; BFA: bacterial foraging algorithm; HSBFA: hybrid spiral-bacterial foraging algorithm; HSDBC: hybrid spiral dynamic bacteria chemotaxis.
Statistical result for 10 and 30 dimensions f1 to f28.
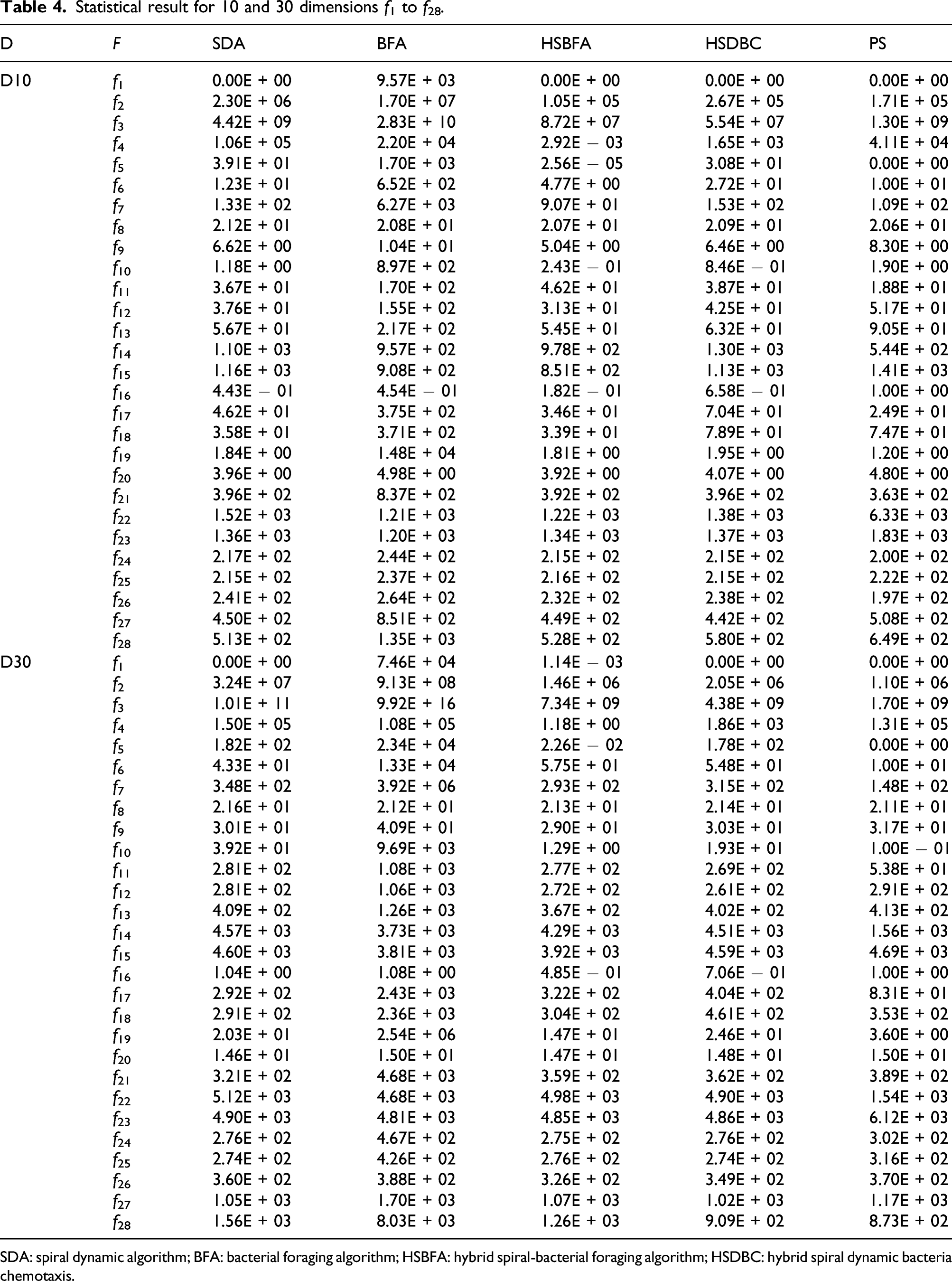
SDA: spiral dynamic algorithm; BFA: bacterial foraging algorithm; HSBFA: hybrid spiral-bacterial foraging algorithm; HSDBC: hybrid spiral dynamic bacteria chemotaxis.
Analysis of the Friedman test for the CEC2013 functions.
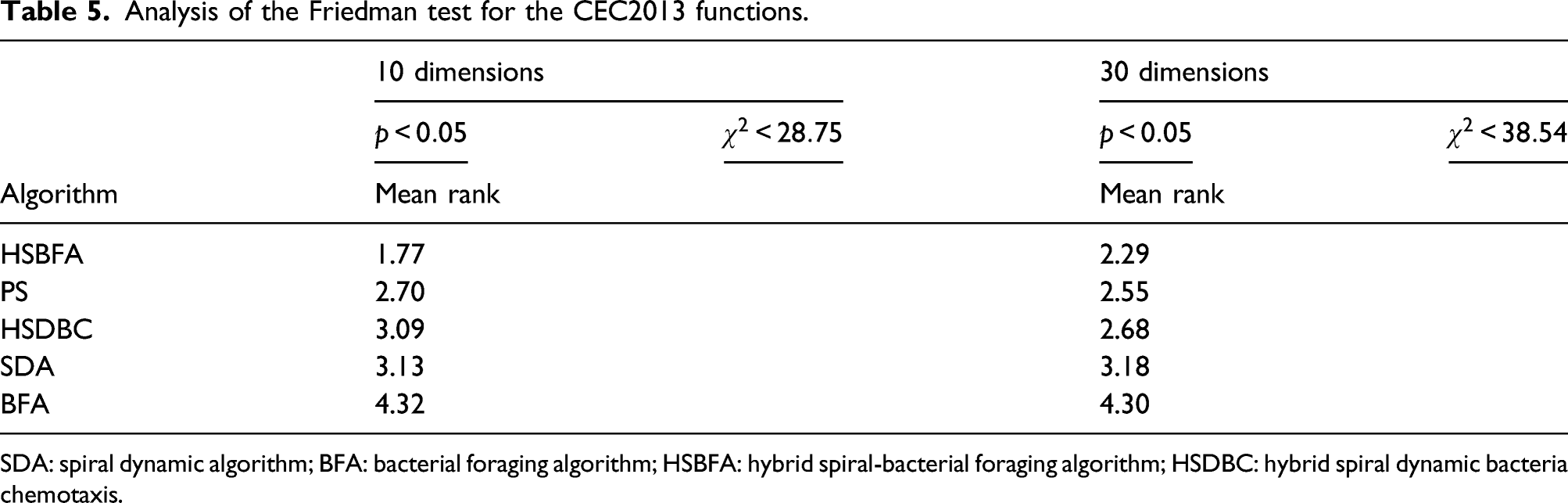
SDA: spiral dynamic algorithm; BFA: bacterial foraging algorithm; HSBFA: hybrid spiral-bacterial foraging algorithm; HSDBC: hybrid spiral dynamic bacteria chemotaxis.
Analysis of the Wilcoxon signed-rank test for CEC2013 functions.
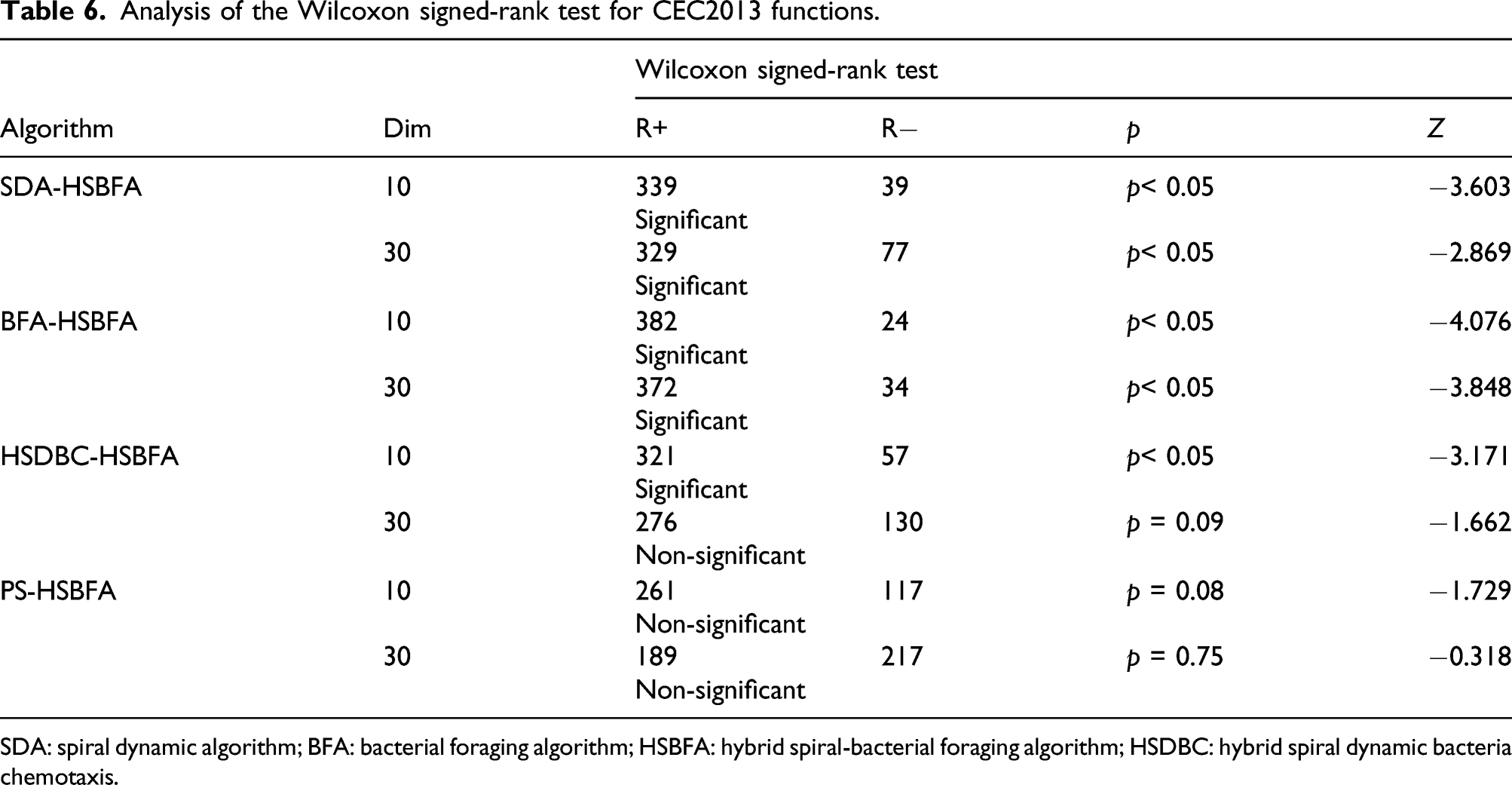
SDA: spiral dynamic algorithm; BFA: bacterial foraging algorithm; HSBFA: hybrid spiral-bacterial foraging algorithm; HSDBC: hybrid spiral dynamic bacteria chemotaxis.
PD-like FLC optimisation for flexible manipulator
In this study, a composite control scheme namely Proportional-Derivative-like Fuzzy Logic Control (PD-like FLC) is used for position tracking of a hub angle. Figure 2 shows the hub angle feedback control block diagram of a PD-like FLC.
30
Block diagram of the hub angle feedback control.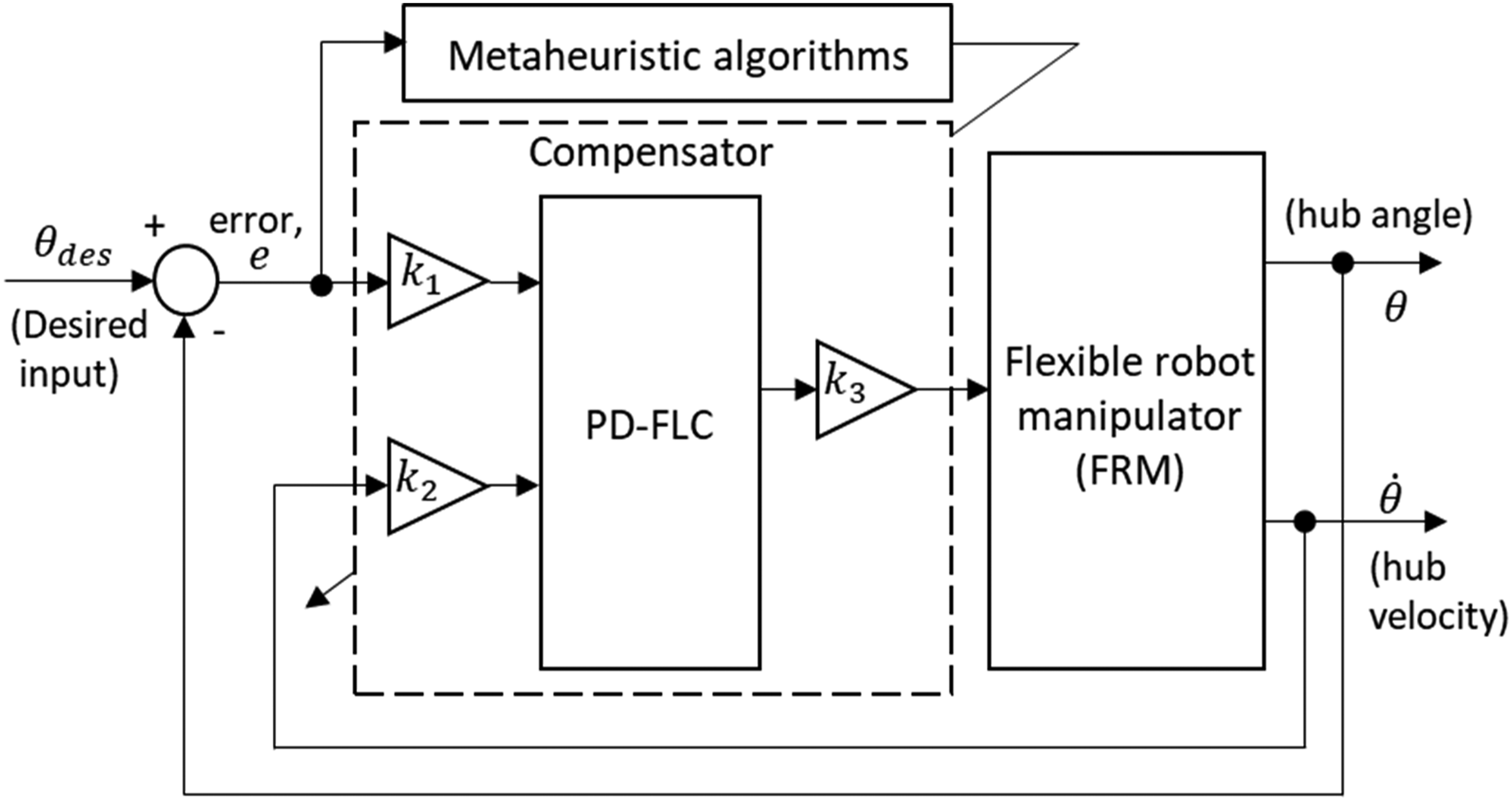
Components of the hub angle feedback control.
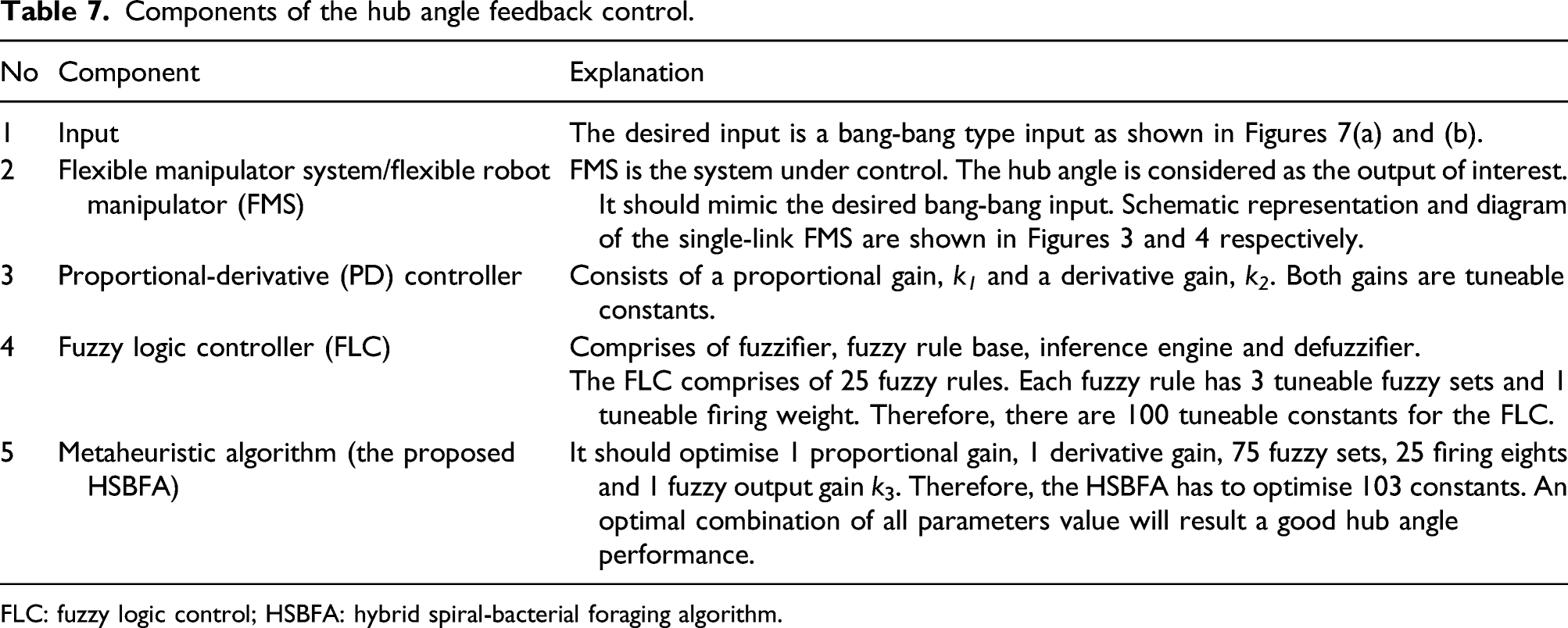
FLC: fuzzy logic control; HSBFA: hybrid spiral-bacterial foraging algorithm.
Flexible manipulator system
Figure 3 shows a schematic representation of the single-link FMS. The dimensions of the beam such as the width, the length, and the thickness, are defined as 19.008 mm, 900 mm, and 3.2004 mm, respectively. L is the cross-sectional area of the beam. The area moment of inertia I = 5.19×10−11 m4, mass density per unit volume, Schematic representation of a single-link flexible manipulator system.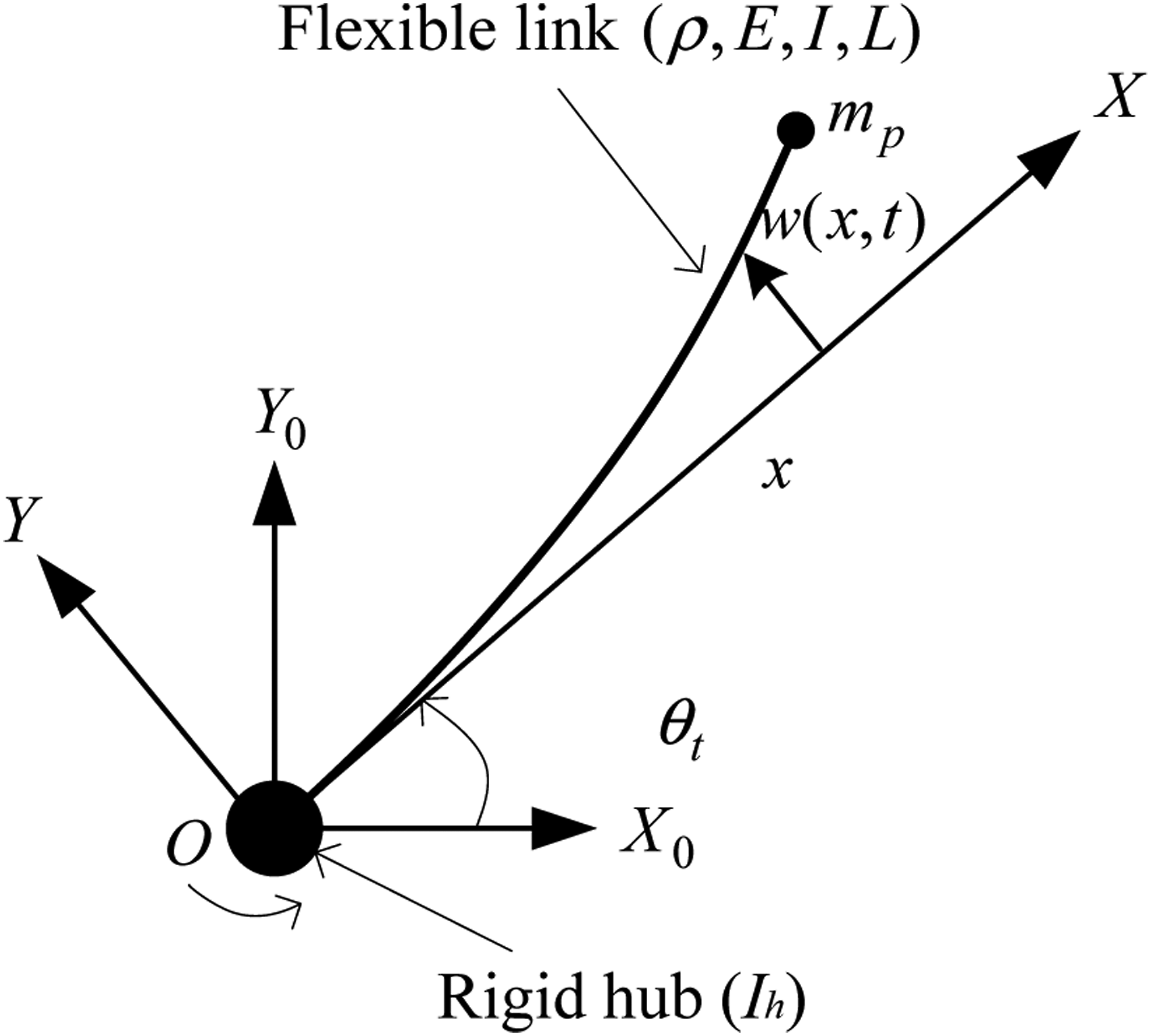
Figure 4 shows a detailed description of the flexible manipulator system.
31
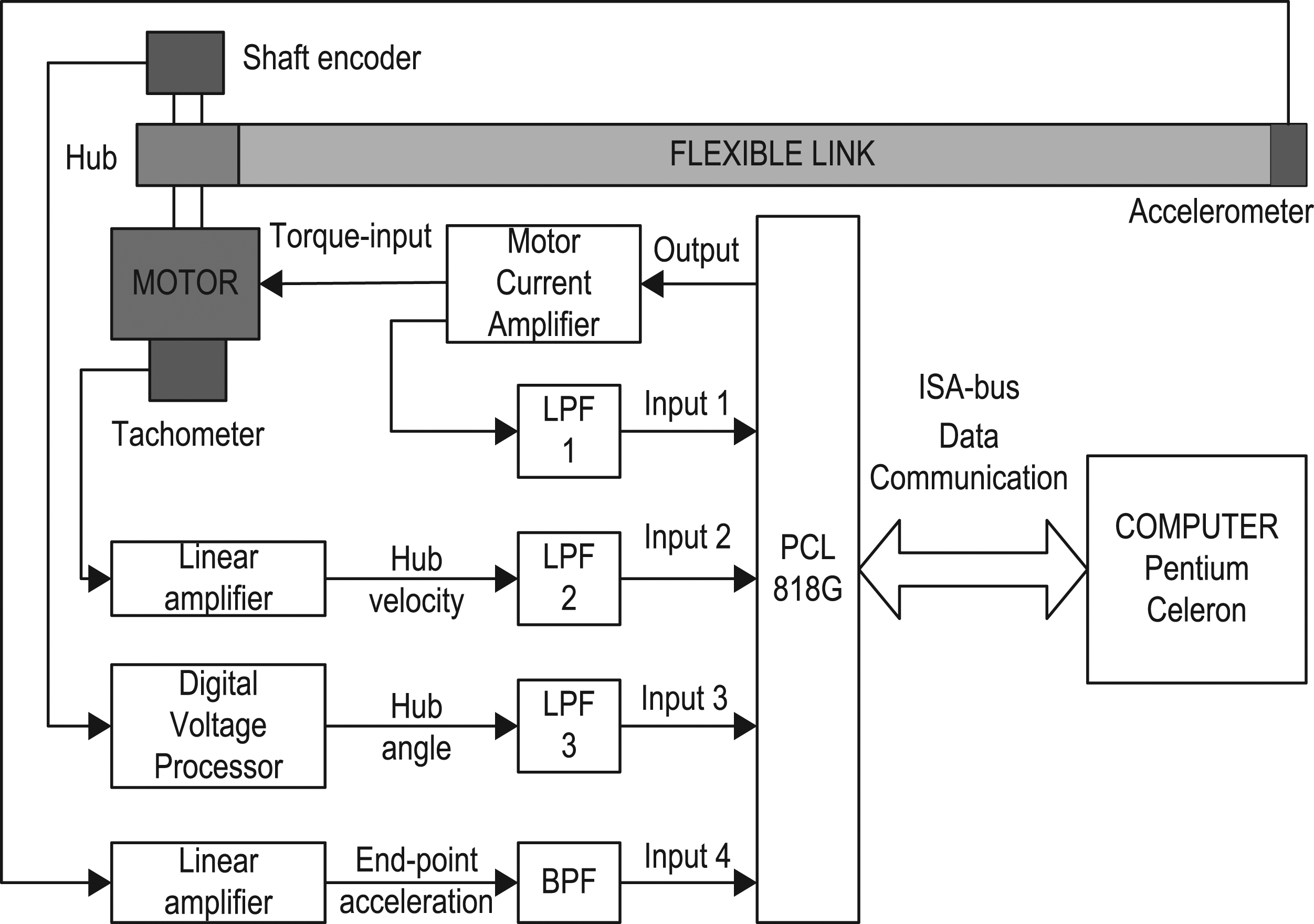
The main component of the system is a flexible link that is made of aluminium rods. It is planarly constrained with flexible dynamics in the horizontal plane and stiff in vertical a motion. An electric motor, which acted as an actuator to the system, is attached to the hub of the flexible link. A tachometer is attached to the electric motor shaft to measure the hub angular velocity. The output of the tachometer is then amplified by a linear amplifier and is applied to a low pass filter, LPF2 to attenuate noise from the amplified signal. An encoder sensor with a resolution of 2048 pulses-per-one-revolution is attached to the electric motor shaft to measure the hub position. The output voltage of the encoder is converted from digital to analogue (D/A) signal by a digital voltage processor or (D/A) converter. It is then applied to another low pass filter, LPF3 for removing noise from the encoder output signal. In order to force the electric motor to rotate in both clockwise and counter-clockwise directions, and enable the link to swing and bend, a bi-directional drive amplifier mounted on a printed circuit board was used. The vibration of the link is measured by an accelerometer sensor attached at the end of the flexible link. The accelerometer consists of a built-in Field Effect Transistor (FET) source follower. It lowers down the impedance level at the output and this avoids the signal distortion. The output signal of the accelerometer is amplified by a linear amplifier and applied into a bandpass filter, BPF to measure the vibration of the flexible link. A personal computer (PC) with a 500 MHz processor is used for the implementation of the control algorithm. An interfacing unit PCL818G card is used to communicate between the PC and the flexible manipulator system and for conversion signals from analogue to digital and vice versa. The output signal of the interfacing unit is applied to a motor driver amplifier in a form of a voltage signal. The motor driver produces a current signal proportional to the input voltage and amplifies the signal before being applied to the electric motor.
32
The signal is also fed back through another low pass filter, LPF1 into the interfacing unit for the purpose of monitoring the applied current signal into the electric motor. Installed in the PC is Matlab software, which served as a platform for controller design. Schematic diagram of the single-link flexible manipulator.
31
In the perspective of a control theory, the important control variables for a flexible manipulator system are the hub-angle and end-point acceleration or vibration of the flexible link. In a real-world application, a control scheme is required to deal with the hub angle position tracking problem while reducing the vibration of the flexible link.33,34
Proportional-derivative control
The parameters k1 and k2 correspond to the proportional and derivative gains, respectively. Here, the proportional gain k1 is multiplied with the hub angle error and the derivative gain k2 is multiplied with the hub angle velocity that are fed back directly from the system. Derivative of a hub angle represents a hub angle velocity. Since the control scheme is a proportional-derivative (PD)-fuzzy type, the feedback signals from the hub angle and hub velocity are considered as the inputs to the fuzzy system. In other words, both k
1
and k
2
can be represented as scaling factors for the fuzzy controller inputs. These scaling factors are important in deciding the optimal boundary of actual physical values that are mapped into a normalised universe of discourse. Moreover, parameter k3 is a scaling factor of the FLC output. It projects the normalised output value of FLC into its actual physical value. This physical value corresponds to the input torque of the flexible manipulator system. The PD control equation, 
Fuzzy logic control
Membership function
Considering the performance of the fuzzy logic control (FLC) and its processing time, five triangular type membership functions are employed with a 0.5 cross-point and uniformly distributed throughout the universe of discourse within a range of [−1, 1] as presented in Figure 5. The set of symbols {NH, NL, ZE, PL, PH} represent the fuzzy sets {negative high, negative low, zero, positive low, positive high}, respectively. The same membership function type is used for fuzzy output and both of the fuzzy inputs. As a result, 25 fuzzy rules are generated in this FLC. Membership functions for the inputs and output of the fuzzy logic controller.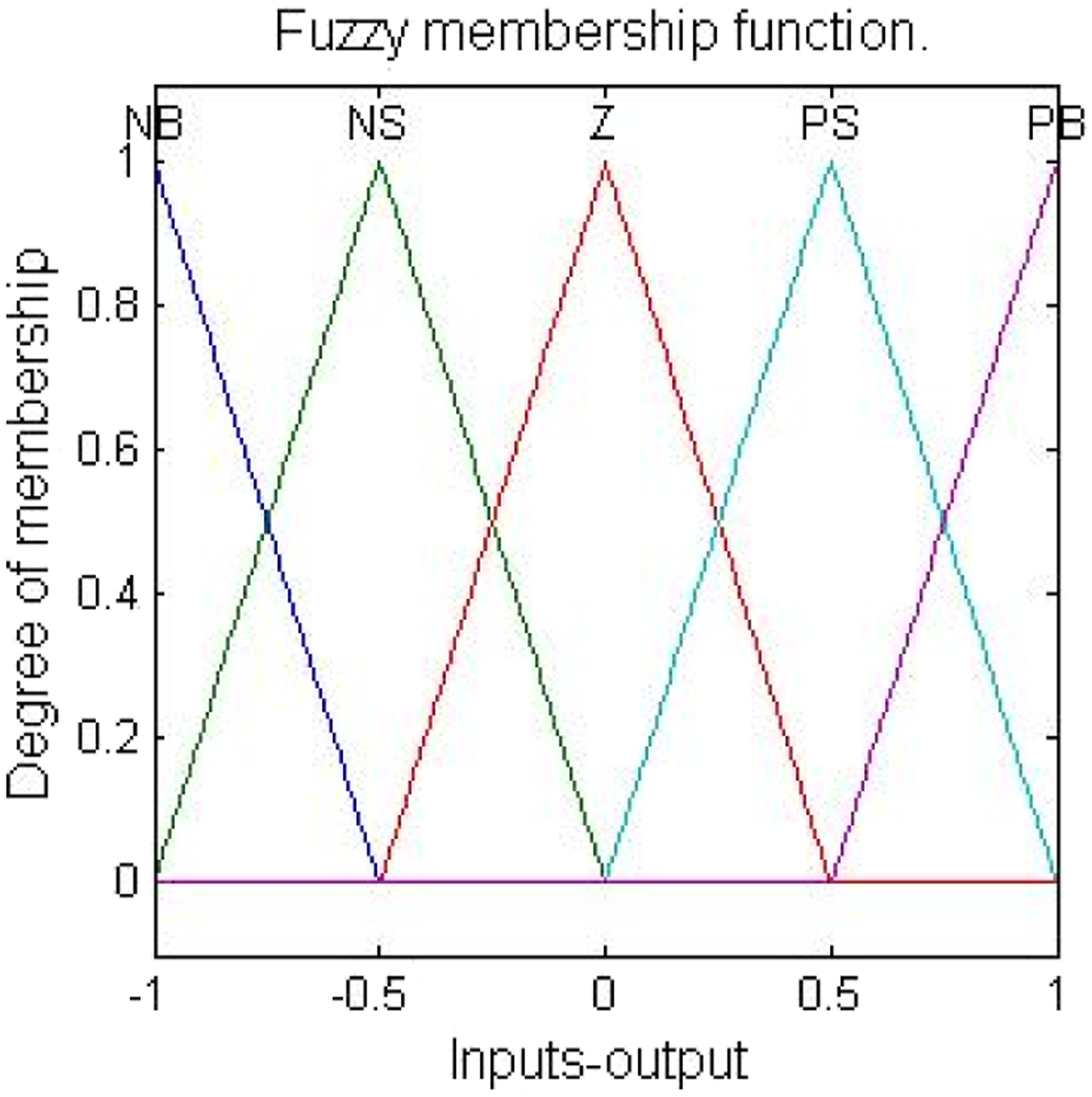
Linguistic fuzzy rule
In developing the FLC rules, the linguistic rules of IF-THEN statements are used to construct a relationship between FLC inputs and output. Let the symbols 
HSBFA-based for PD-FLC optimisation
The effectiveness of the proposed HSBFA algorithm is validated by optimising the PD-like FLC for the flexible manipulator system. A single-input and multi-output state-space equation of motions presented in Refs. 30 and 35 is used to represent the flexible manipulator system. In particular, the HSBFA method is used to find the optimal control parameters for the PD-like FLC to result in better tracking and control performance. The proposed HSBFA algorithm is employed to optimise the proportional k1 and derivative k2 controller gains, fuzzy output gain k3, fuzzy sets, and the firing weight of the FLC system. Specifically, a total of 103 controller parameters are determined which results in a 103-dimensions problem. It consists of 75 fuzzy sets, 25 fuzzy firing weights, 1 proportional gain, k1, 1 derivative gain, k2, and 1 fuzzy output scaling factor, k3. The fuzzy set of the linguistic variables P, Q, and R that are denoted by {NH, NL, ZE, PL, PH} as shown in equation (3) is represented by an integer value {1, 2, 3, 4, 5}, respectively. The fuzzy firing weights, proportional, derivative, and output gains are set as a value between [0, 1]. There are two search ranges defined in the algorithm. The first search range is between [1, 5] and it is associated with the fuzzy sets. The second search range is between [0, 1] and it is associated with fuzzy firing weights and gains of the hybrid controller. All the parameters are optimised simultaneously and they are configured in the optimisation algorithm such that the value is optimal if the error function of the algorithm is minimised.
The error function for hub angle tracking employed in the optimisation algorithms is defined as the absolute mean error J, given by equation (4)
Parameter values for SDA, BFA, HSBFA, and HSDBC.

SDA: spiral dynamic algorithm;BFA: bacterial foraging algorithm; HSBFA: hybrid spiral-bacterial foraging algorithm; HSDBC: hybrid spiral dynamic bacteria chemotaxis.
Optimised gain values for PD-like FLC.

SDA: spiral dynamic algorithm; BFA: bacterial foraging algorithm; FLC: fuzzy logic control; HSBFA: hybrid spiral-bacterial foraging algorithm; HSDBC: hybrid spiral dynamic bacteria chemotaxis.
Fuzzy rules optimised by SDA and BFA.
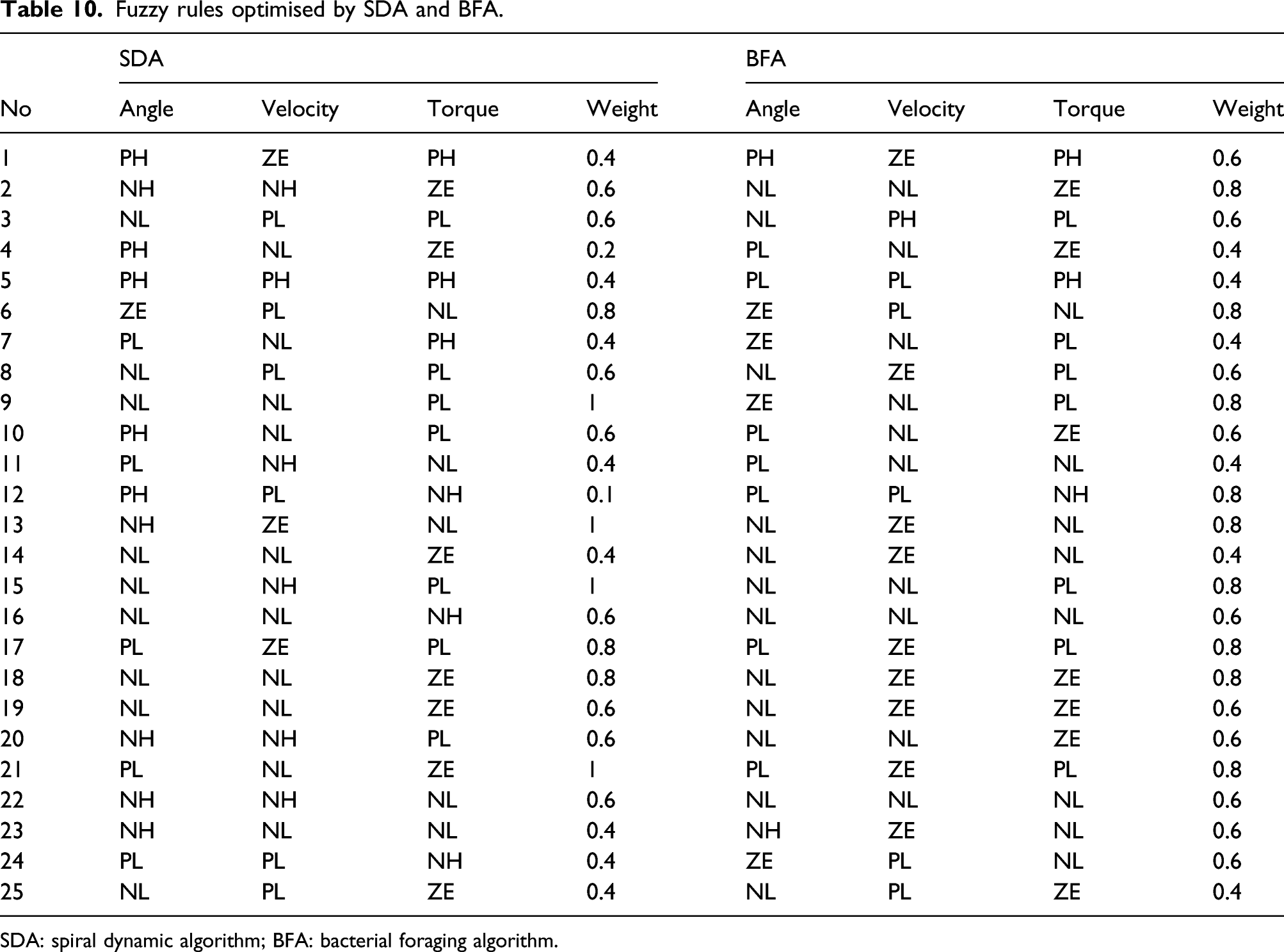
SDA: spiral dynamic algorithm; BFA: bacterial foraging algorithm.
Fuzzy rules optimised by HSBFA and HSDBC.
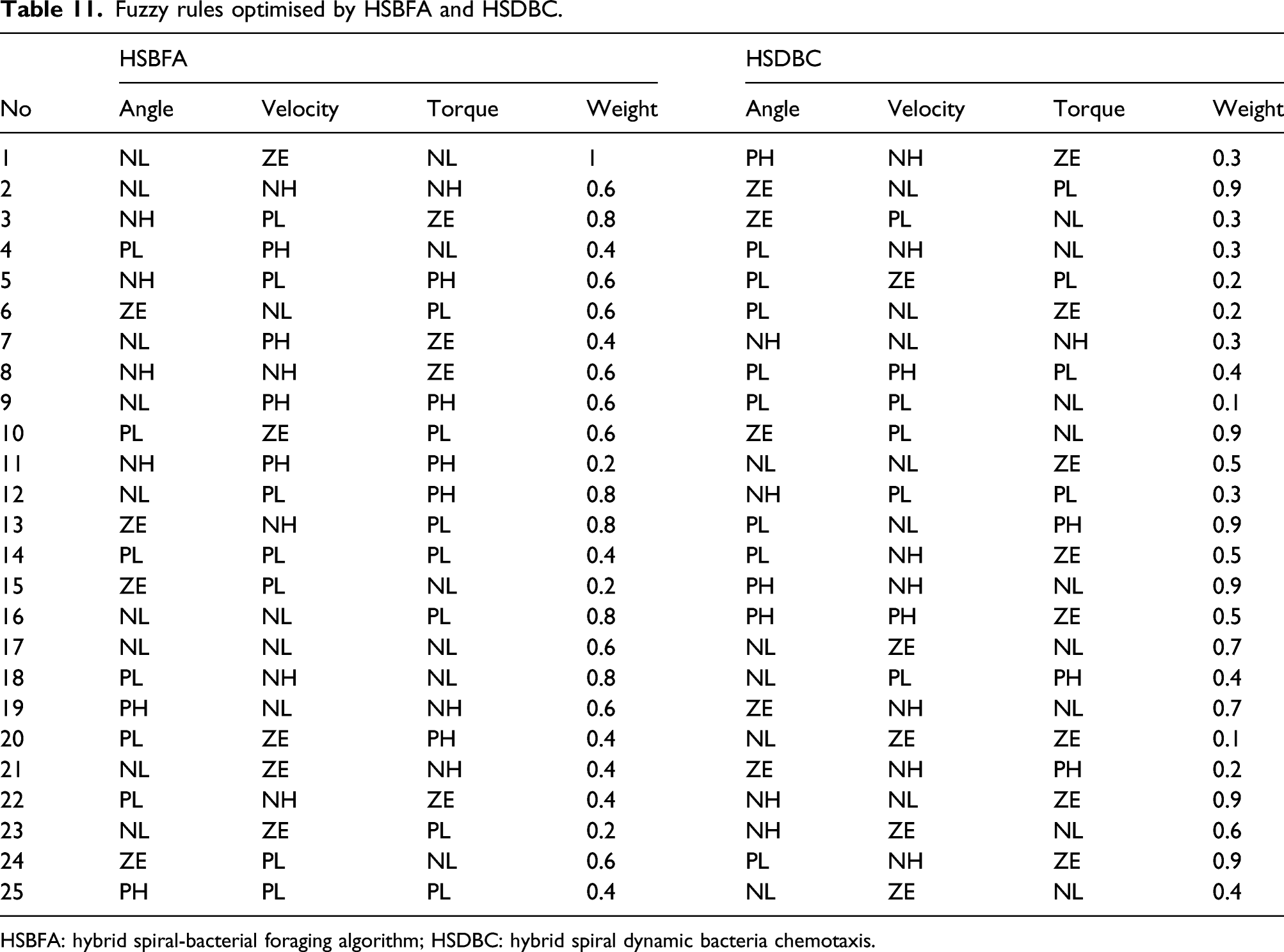
HSBFA: hybrid spiral-bacterial foraging algorithm; HSDBC: hybrid spiral dynamic bacteria chemotaxis.
The convergence responses for tuning the PD-like FLC parameters are shown in Figure 6. This consists of the convergence plot for the four algorithms in terms of iteration. Notice that at the early iterations, the SDA showed the fastest speed followed by HSBFA, HSDBC, and BFA. However, after 30 iterations the trend changed and HSBFA successfully intercepted the SDA graph. The SDA graph started to gradually converge to a local optimum while the HSBFA sharply converged until iteration 40 before converging gradually to a nearly global optimum point. The HSBFA achieved the best location among the four algorithms under study. The HSDBC hardly converged at the beginning of the search operation until it reached iteration 76. However, between iterations 77 and 105, it converged sharply. It showed a slower convergence starting from iteration 106, and it finally got trapped in a local optimum location. The BFA showed the worst performance in terms of convergence speed where it started to converge at the beginning of iteration 162 and was the slowest among the four algorithms. However, the BFA successfully intercepted the SDA after 633 iterations, and it was unable to converge further after 702 iterations. Convergence plot of the algorithms.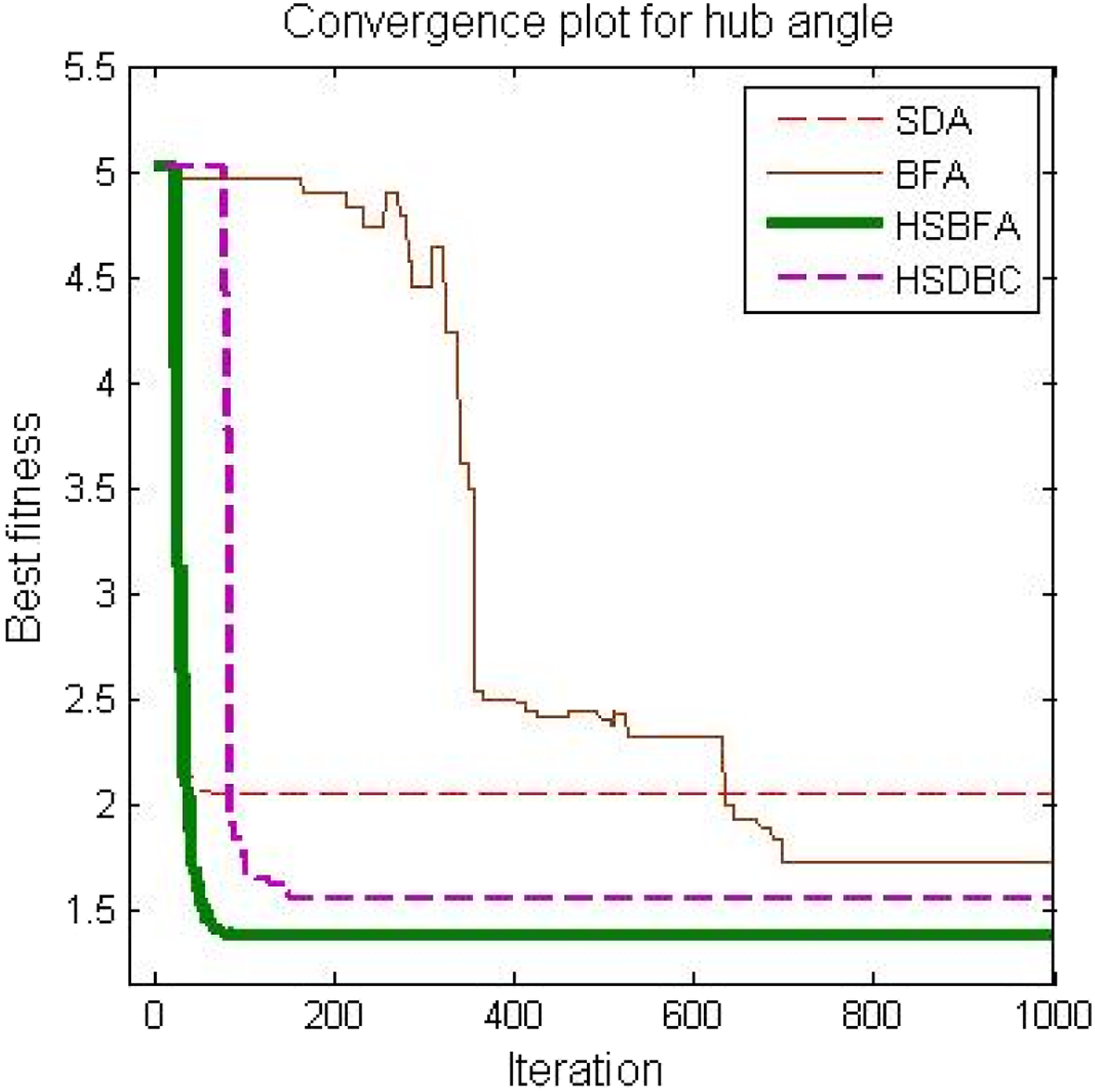
The responses of the hub angle position of the flexible manipulator optimised by the algorithms are shown in Figure 7(a). Figure 7(a) portrays an overall picture of the response while Figure 7(b) shows a zoomed-in graph for the first 1.4 s of the response. Figure 8 shows the control performance analysis of the hub angle response computed based on the results in Figure 7(b). The results clearly show that the BFA-based system response had the highest percentage overshoot while the HSDBC-based system response had the highest percentage undershoot with 6.69% and 2.69%, respectively. It is observed that the BFA-based and HSDBC-based system responses shared the lowest rise time followed by HSBFA and SDA with the achieved times of 0.21 s, 0.22 s, and 0.27 s, respectively. Here, the hybrid controller optimised by HSBFA showed a very good performance where it could produce significantly low overshoot and undershoot although the rise time was almost similar to the fastest. For the steady-state error, the BFA and SDA achieved the second and third places with the errors 0.05 and 0.13, respectively while the HSBFA and HSDBC performed significantly better than the two algorithms with the same error of 0.01. In terms of the settling time, as depicted in Figure 7(a), the HSBFA showed the best achievement where the response was kept within 2% of the final point (i.e. 36 degrees). The BFA was in second place after HSBFA at the time of 0.43 s followed by HSDBC and SDA at 0.52 and 0.53 s, respectively. The performances are shown in Figures 7 and 8 comply with the results shown in Figure 6 where overall, the HSBFA showed the best performance followed by HSDBC, BFA, and SDA. The HSBFA had a balanced trade-off considering all the five performance specifications. The HSBFA has the best performance for the settling time and steady-state error while there is no worst performance for the HSBFA. The HSDBC has the best performance for the steady-state error, rise time, and overshoot, but it has a significantly worst performance for the undershoot. Noted that there is only a small difference between the rise time and overshoot performances of HSBFA and HSDBC. This gives an advantage to the HSBFA and hence outperformed the HSDBC and the other two algorithms. Time-domain response of the hub angle: (a) overall plot and (b) Zoomed-in for the first 1.4 s. The performance of the flexible manipulator in a bar chart.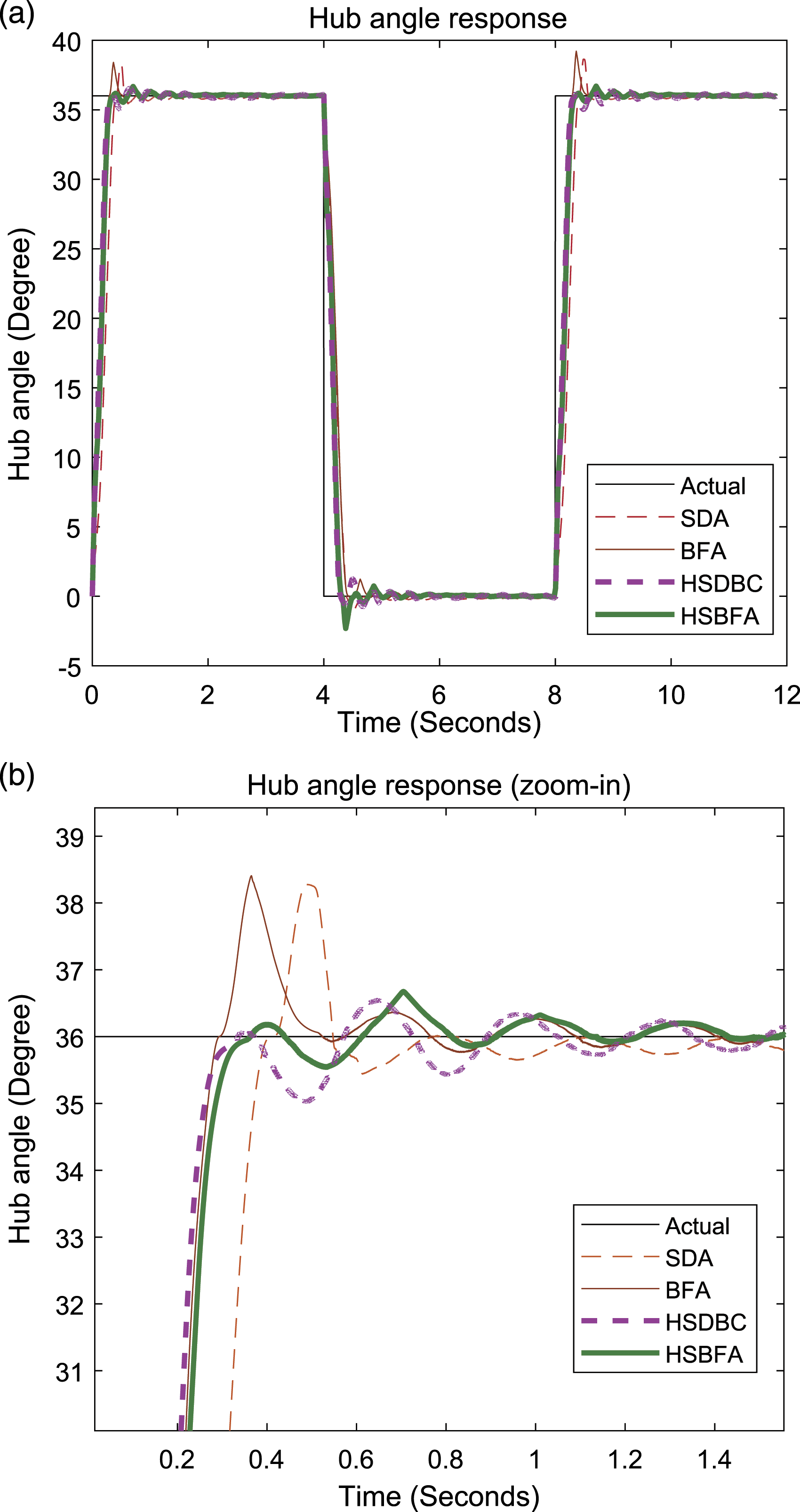
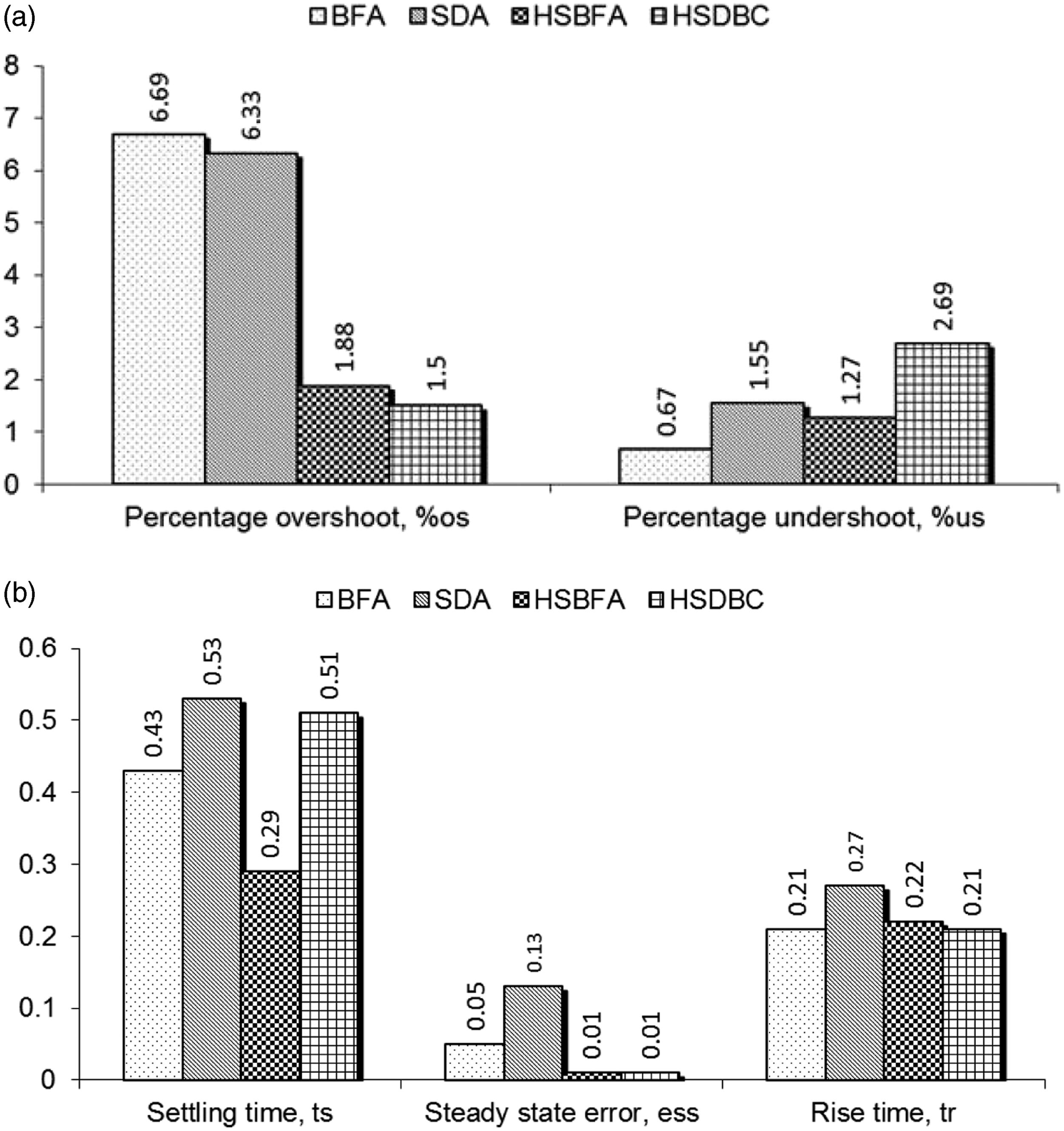
It is also noted from Figure 8 that the HSBFA-based and HSDBC-based system has shown considerable performance difference in terms of percentage overshoot. The chart also shows a significant difference in the control performance of the settling time between HSBFA-based and the other systems. Among the five characteristics of the time-domain response, the SDA-based system had the worst control performance in terms of steady-state error, settling time, and rise time. The BFA-based and HSDBC-based systems had the worst control performance in terms of percentage overshoot and percentage undershoot, respectively. The chart depicts that the difference is significantly large compared to the others. None of the HSBFA-based system time-domain response characteristics had the worst control performance than the other three systems. Overall, the best control performance for the hub angle position control of the flexible manipulator system was produced by the HSBFA-based system where it achieved a balanced combination of the dynamic response parameters.
Conclusion
A slow convergence rate is the main deficiency of BFA. On the contrary, SDA has a faster convergence rate, but the likelihood that it will be trapped in a local optimal solution is relatively high especially in the case of higher-dimensional problems. In this paper, to tackle the problems, a synergy between the BFA and SDA has been proposed. A spiral model of the SDA has been incorporated into the chemotaxis phase of the BFA where the movement of the bacteria is guided by the best bacterium found in the previous iteration and the synergy combines the random and spiral deterministic approaches in the motion. Moreover, the combination of the spiral model into the chemotaxis phase of BFA has introduced bacterium with a dynamic step size that enhances the algorithm to produce the near-global optimal solution. Hence, the possibility of locating the near-global optimal solution at any location in the search space has increased.
The proposed algorithm has been validated with a set of state-of-the-art benchmark functions comprising 10 and 30 dimensions taken from the CEC2013. The results have been compared with those of predecessor algorithms, that is, BFA, SDA, and other types of optimization algorithms. The result of the test has been statistically analysed through the non-parametric Friedman and Wilcoxon signed-rank analytical approaches to determine the best algorithm that can locate a position close to the theoretical global optimum point. Moreover, in order to show the effectiveness of the proposed algorithms in solving a complex and real-engineering problem, they have been employed to automatically obtain and optimise a nonlinear composite intelligent FLC for tracking control of hub angle position of a flexible manipulator system.
The performance tests and analyses carried out with benchmark functions have shown that the HSBFA has produced better accuracy compared to the other contested algorithms and it has been ranked as the first out of the five algorithms. On the other hand, the results of tests on the flexible manipulator system have shown that the proposed hybrid algorithm has optimally acquired the FLC control parameters and has tracked the hub angle better compared to its predecessor and other well-known algorithms.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work has been financially sponsored by the Fundamental Research Grant Scheme FRGS/1/2019/ICT05/UMP/03/1 and awarded by the Ministry of Higher Education Malaysia (MOHE) via Research and Innovation Department, UMP. It has the university reference number RDU1901217.